Результат интеллектуальной деятельности: СПОСОБ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицине, а именно к способам и устройствам для управления хирургическим инструментом с пропусканием электрического тока через ткани, подлежащие нагреванию, в частности для контроля и достижения трансмуральности при абляции миокарда при кардиохирургических операциях.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известен способ неразрушающей деструкции миокарда предсердий при лечении наджелудочковых аритмий и устройство для его осуществления, раскрытые в заявке РФ [RU2016150580 A, опубл. 22.06.2018] и в патенте РФ [RU2665627, опубл. 03.09.2018]. Способ включает пенетрацию ткани миокарда и радиочастотное воздействие на миокард предсердий по линиям радиочастотной деструкции, при этом радиочастотные импульсы последовательно подают на выбранные электроды бранши, воздействуя в области выбранных электродов на секторе миокарда, измеряя импеданс между электродами и температуру в области воздействия электродов.
Основным недостатком данного способа и устройства является усложнение конструкции инструмента, так как необходимо дополнительно размещать на инструменте датчики температуры. При этом будет измеряться температура самого датчика, которая при быстром изменении температуры будет отличаться от температуры ткани в месте измерения. Кроме того, невозможно измерить температуру во всем объеме ткани, так как датчики можно установить только в некоторых точках. Выборочный контроль температуры не позволяет достоверно определить достижение трансмуральности, так как для этого необходимо обеспечить нагрев самой низкотемпературной области ткани выше необходимого порога.
В каком участке ткани температура будет минимальной заранее неизвестно, поэтому датчик может не попасть в эту область. Соответственно вывод о достигнутой трансмуральности может быть ложным.
Известно электрохирургическое устройство для обработки ткани во время хирургической процедуры, а также способ его работы и контроля, раскрытые в патенте США [US5558671 А, опубл. 1996-09-24], в котором выбор времени воздействия на ткани для достижения её трансмуральности определяется на основе контроля импеданса ткани и достижения уровня расчётного импеданса.
Основным недостатком данного способа и устройства является отсутствие контроля скорости изменения импеданса. Этот способ работает только при выборе оптимальной мощности генератора для объема ткани, зажатой между браншами. В этом случае неравномерное выделение энергии в ткани компенсируется вследствие теплообмена между участками ткани с разной температурой. Если мощность генератора превышает необходимую для данного объема ткани, происходит локальный перегрев ткани и повышение импеданса в области контакта с электродом. Импеданс ткани достигает порогового значения и выдается ложное сообщение о трансмуральности.
Известен способ управления устройством для абляции путем выбора уровня приложенной мощности в зависимости от импеданса обрабатываемой ткани, раскрытый в Международной заявке [WO2006080982 А1., опубл. 2006-08-03] и включающий:
а) размещение двух электродов устройства для абляции на поверхности ткани;
б) измерение импеданса ткани между электродами;
c) подачу питания на электроды на основе измеренного импеданса ткани путем:
i) подачу на электроды по существу постоянной мощности, если измеренный импеданс ткани находится между первым пороговым импедансом и вторым пороговым импедансом, причем первый пороговый импеданс меньше второго порогового импеданса;
ii) подачу на электроды переменной мощности, если измеренный импеданс ткани больше, чем второй пороговый импеданс, причем переменная мощность обратно пропорционально связана с импедансом ткани.
Основным недостатком данного способа и устройства является то, что для разного объема ткани между браншами нужна разная постоянная мощность, подаваемая на инструмент. Мощность определяется только значением импеданса в данный момент времени. Но разный объем ткани, в зависимости от условий захвата ткани инструментом, может иметь одинаковый импеданс. Толщина ткани, ширина захваченного участка и сама структура ткани (наличие жира, например) не являются неизменными параметрами. Узкий и тонкий участок ткани и толстый, и широкий могут иметь одинаковый импеданс, но мощность для абляции в каждом случае нужна разная.
Мощность может оказаться избыточной для конкретных условий, это приведет к локальному перегреву и высушиванию ткани в зоне контакта с электродом, повышению импеданса и ложному выводу о полученной трансмуральности.
Недостаточная мощность приведет к увеличению времени абляции и, соответственно, к нежелательному прогреву ткани, расположенной близко к зоне абляции.
Из вышеприведённого можно сделать вывод, что известно управление мощностью генератора и временем воздействия на обрабатываемую ткань электрохирургического устройства для абляции, которое может быть осуществлено на основе контроля температуры обрабатываемой ткани, или на основе контроля импеданса обрабатываемой ткани, или выбора уровня приложенной мощности или управлением мощностью и временем работы генератора в зависимости от скорости изменения импеданса ткани. Однако все известные устройства и способы не решают в достаточной мере контроль достижения полноты поражения (трансмуральности).
Таким образом, существует потребность введения дополнительных критериев для оценки достижения трансмуральности в процессе воздействия на биологические ткани радиочастотного биполярного электрохирургического инструмента (контроль скорости изменения импеданса и скорости изменения мощности, предварительное определение максимального уровня мощности, подсчёт энергии, отданной в нагрузку и определение необходимой полной энергии, определение предела времени абляции на участке импеданса с постоянной скоростью).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на устранение вышеуказанных проблем и преодоление одного или нескольких рассмотренных недостатков.
В основу изобретения поставлена задача создания способа с более достоверным контролем (оценкой) достижения факта и момента трансмуральности биологических тканей в процессе их абляции, а также устройства для его осуществления, не требующего сложного оборудования.
Техническим результатом является повышение надежности создания электрически непроводящих участков ткани, что в свою очередь приведет к сокращению времени операций и увеличению результативности процедуры абляции.
Поставленная задача решается тем, что предлагаемый способ абляции биологических тканей включает:
– размещение двух электродов устройства (инструмента) для абляции в контакте с поверхностью ткани таким образом, чтобы обрабатываемая ткань располагалась между электродами;
– подачу на электроды инструмента напряжения;
– вычисление значения импеданса ткани Z и скорости его изменения dZ/dt;
– вычисление мощности W и скорости её изменения dW/dt;
– подсчет отданной в нагрузку энергии E;
– поддержание заданного значения скорости снижения импеданса;
– оценку значения необходимой для достижения трансмуральности ткани полной энергии Eп при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса;
– оценку максимально допустимой мощности Wмакс, при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса;
– осуществление перехода в режим поддержания постоянного уровня импеданса (выход на плато);
– оценка достижения трансмуральности на основании установления значения мощности W превышающей Wмакс или на основании количества отданной в нагрузку энергии E превышающей значение необходимой для достижения трансмуральности ткани полной энергии Eп или по истечению заданного времени, после осуществления перехода в режим поддержания постоянного уровня импеданса.
Кроме того, заданное значение скорости снижения импеданса выбирают из диапазона от 2 до 10 %, предпочтительно 5 %.
При том, что заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
Кроме того, поддержание заданного значения скорости снижения импеданса и поддержание постоянного уровня импеданса осуществляют путем изменения мощности.
При этом скорость изменения мощности выбирают из диапазона от 1 до 5 Вт/с и предпочтительно не более 3 – 5 Вт/с.
Целесообразно, чтобы значение полной энергии Eп было в 2-5 раз больше значения энергии при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Целесообразно, чтобы максимально допустимая мощность Wмакс была в 3 - 6 раз, предпочтительно в 4 - 5 раз больше значения мощности при достижении значения импеданса величины, составляющей 0,7 – 0,8 от начального значения импеданса.
Кроме того, для вычисления начального значения импеданса на электроды подают напряжение от 5 до 25 В, предпочтительно от 10 до 20 В.
Поставленная задача решается также тем, что устройство для абляции биологических тканей содержит блок питания, соединенный с высокочастотным генератором, системой управления, включающей микропроцессор, и дисплеем, подключенный к системе управления, а также содержащее выходную цепь для согласования генератора с рабочим инструментом для абляции, датчик напряжения и датчик тока , подключённые к выходной цепи и соединенные с системой управления, при этом микропроцессор выполнен с возможностью:
– вычисления значения импеданса ткани и скорости его изменения, вычисление мощности и скорости её изменения, а также подсчета отданной в нагрузку энергии;
– поддержания заданной скорости снижения импеданса;
– определение полной энергии, необходимой для достижения трансмуральности ткани, и максимально допустимой мощности;
– поддержания постоянного уровня импеданса при выходе на плато;
– индикации вывода о достижении трансмуральности;
– отключения генератора на основании вывода о достижении трансмуральности или по таймеру.
Предлагаемый способ абляции предназначен для нагрева биологических тканей с целью деструкции определённого участка ткани без нарушения целостности органа. Данный способ применяется, в частности, для создания электроизолирующих линий на некоторых участках миокарда, препятствующих патологическому распространению электрических сигналов, вызывающих фибрилляцию предсердий. Электрическая энергия в таких устройствах доставляется к участку миокарда посредством электродов, соединённых с прибором, генерирующим как правило радиочастотную электрическую энергию. Для оптимизации результата воздействия, выражающемся в наиболее полной коагуляции тканей, находящихся в зоне приложения энергии, при этом, не допуская их механического разрушения, необходимо индивидуально для каждого отдельного воздействия контролировать уровень мощности генератора и время воздействия энергии. Участок ткани может обрабатываться при помощи двух или более электродов приложенных к поверхности ткани, так и будучи зажатым между противоположными электродами или группами электродов. Непосредственное измерение температуры ткани выполнить сложно, но косвенно о скорости ее изменения можно судить по скорости изменения импеданса. Мощность необходимо поддерживать на таком уровне, чтобы обеспечить заданную скорость изменения импеданса. Чем ниже импеданс, тем быстрее увеличивается мощность для поддержания заданной скорости его снижения. Неограниченное продолжение этого процесса неизбежно приведет к закипанию жидкости. Необходимо не допустить превышения мощности. По уровню мощности и соответствующей скорости изменения импеданса можно рассчитать энергию, необходимую для нагрева ткани до определенной температуры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ.
Далее настоящее изобретение будет описано в виде примеров со ссылкой на сопровождающие чертежи, на которых:
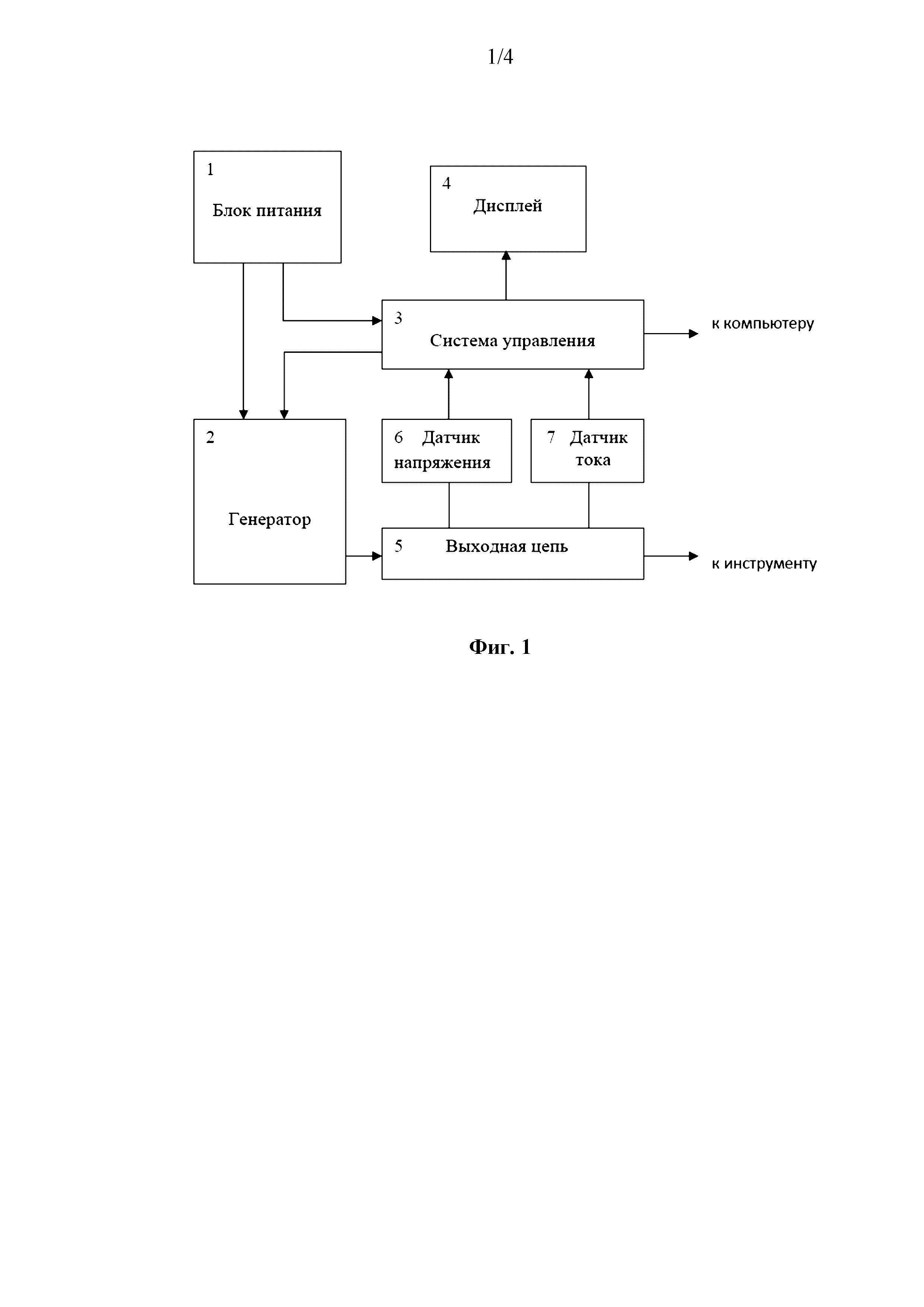
На Фиг. 1 представлена блок-схема устройства для осуществления предлагаемого способа.
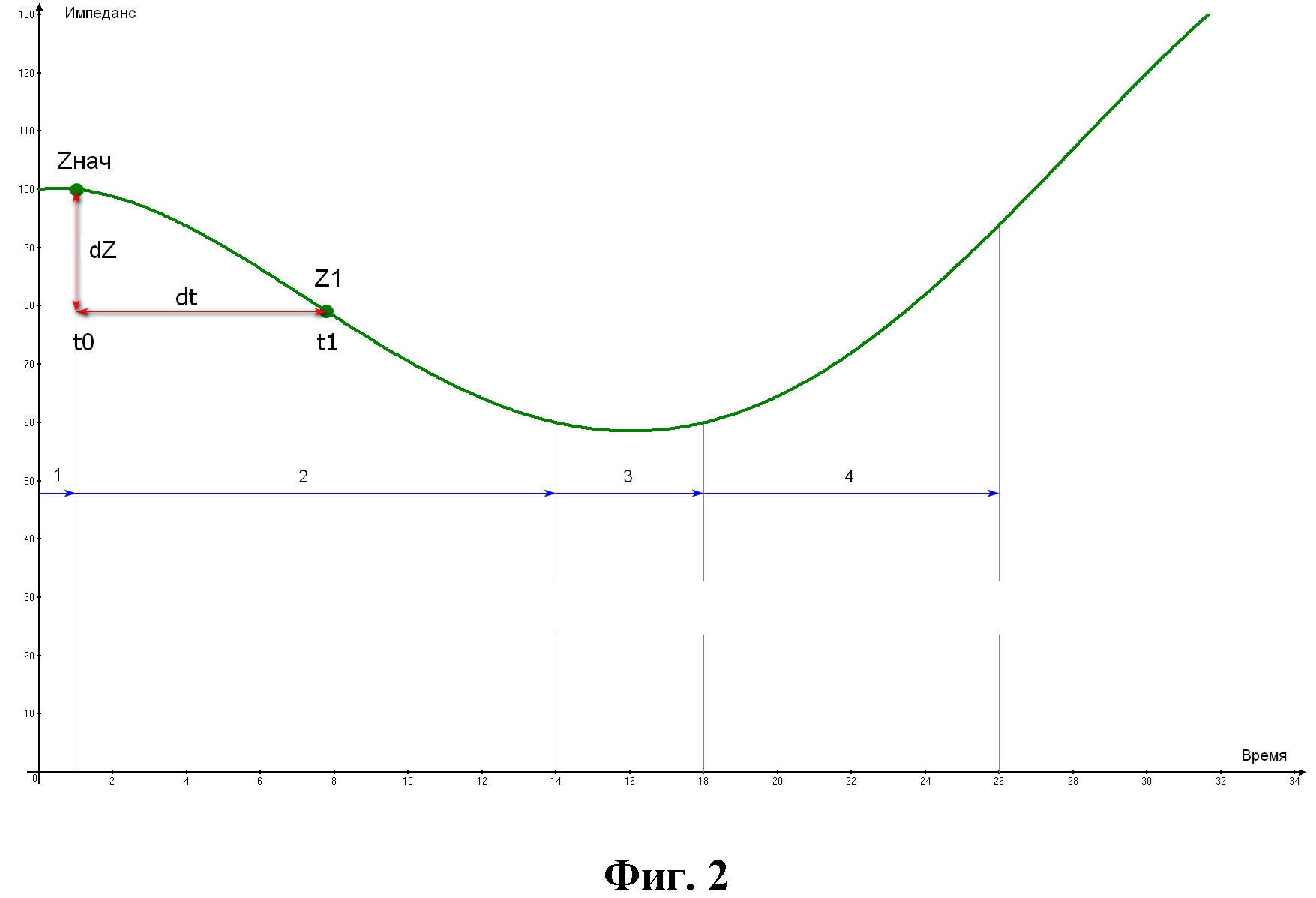
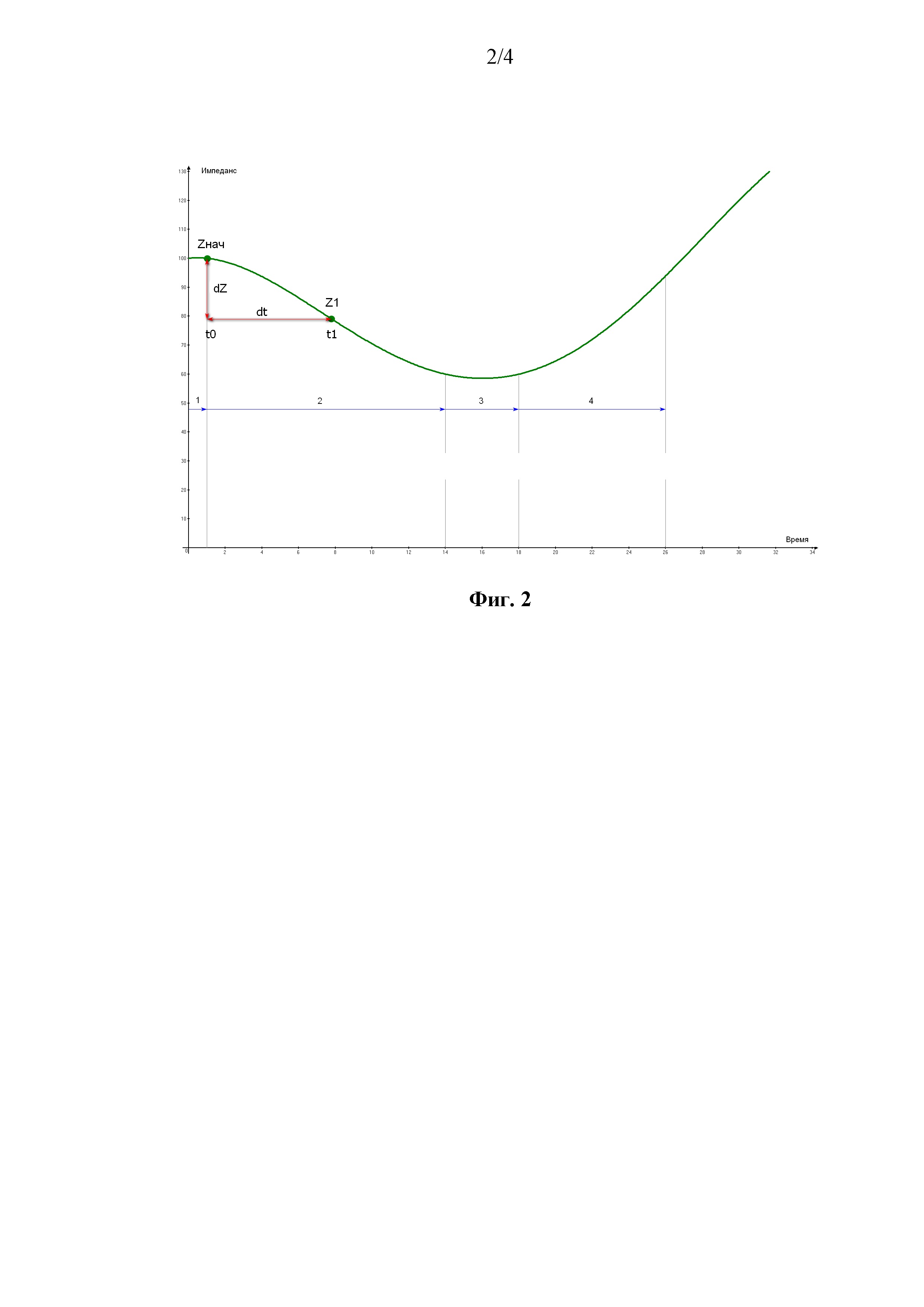
На Фиг. 2 приведен график зависимости импеданса от времени.
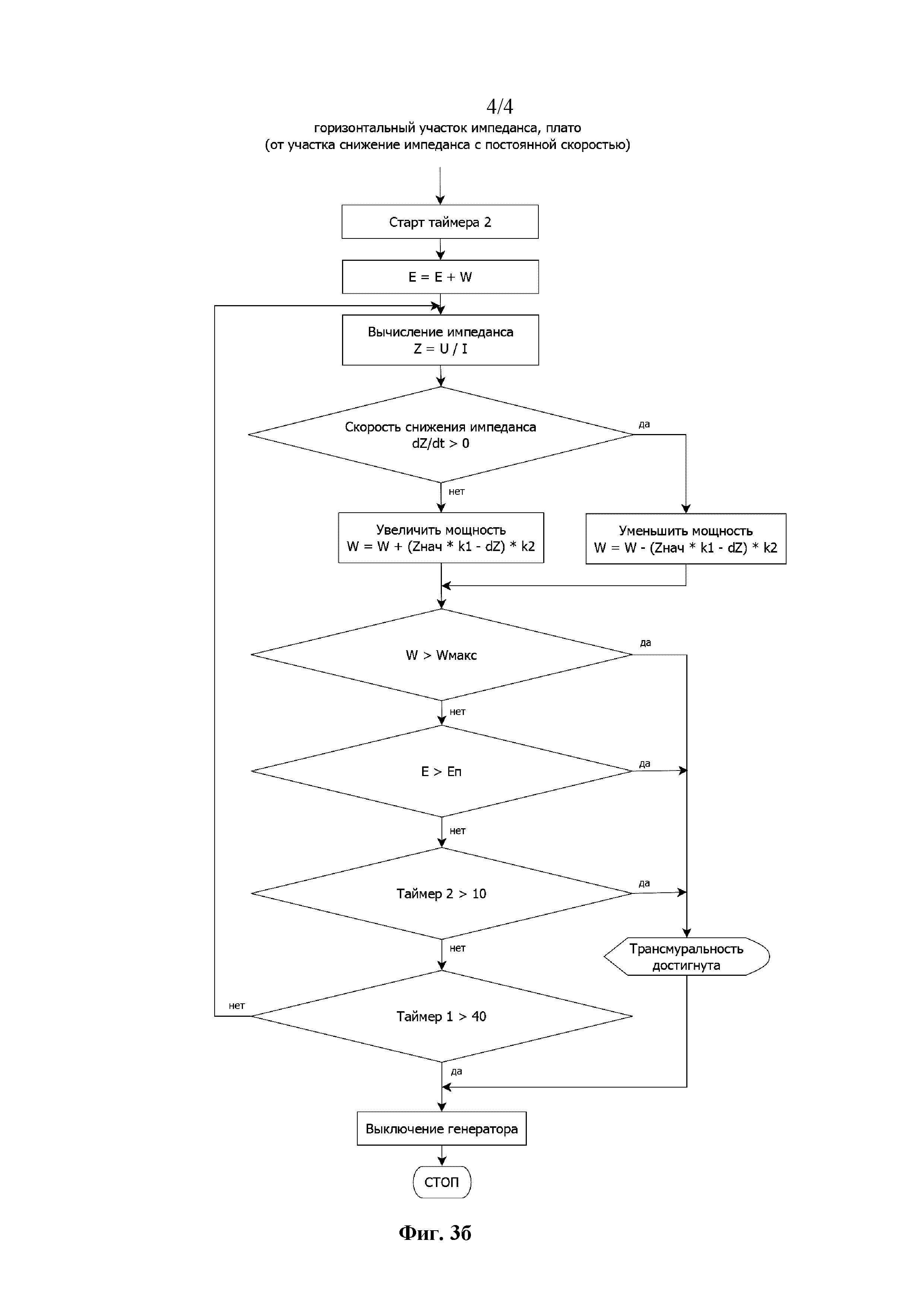
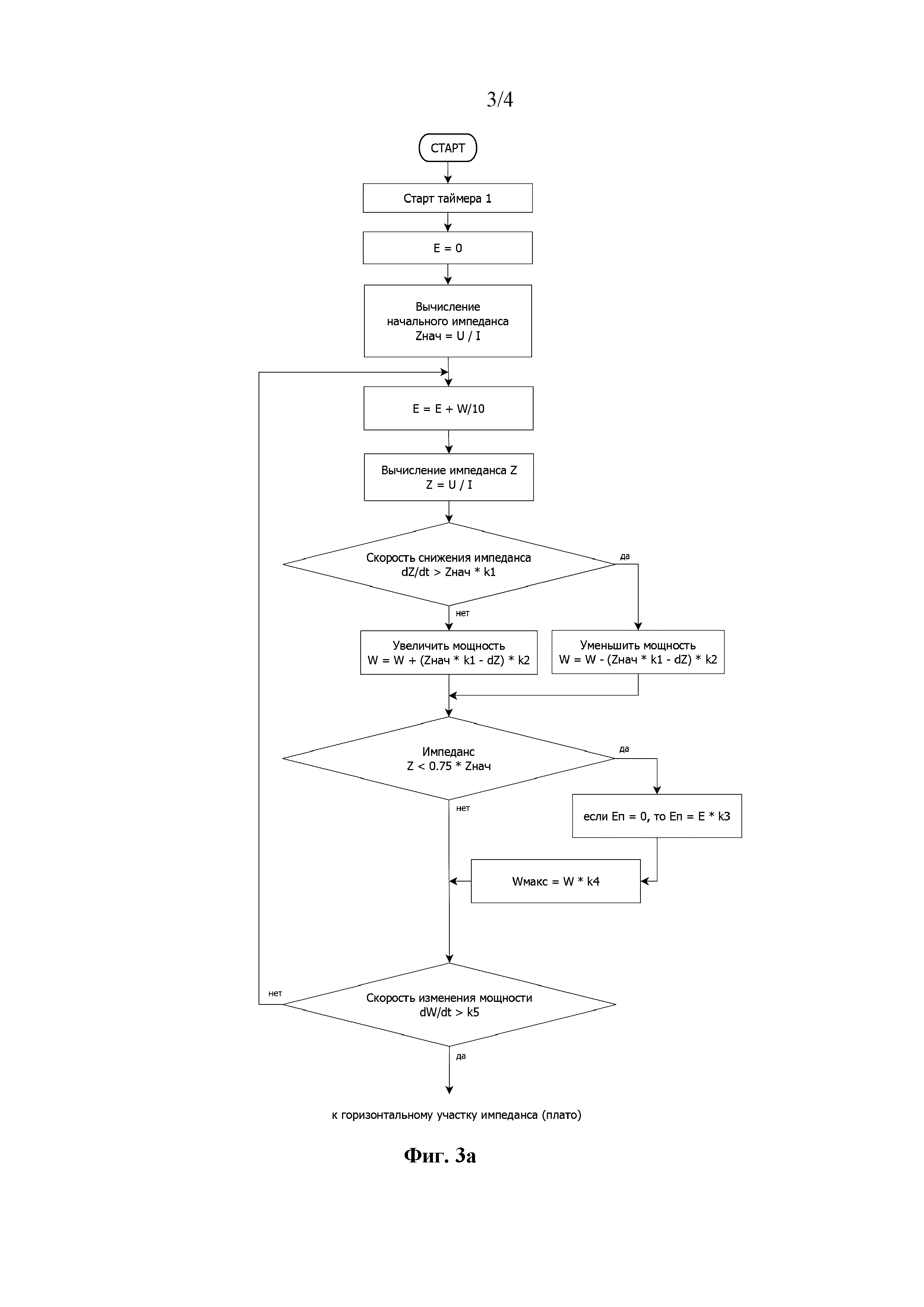
На Фиг. 3 представлен алгоритм работы устройства в виде блок-схемы:
фиг 3а – начало процесса абляции до перехода к горизонтальному участку импеданса (плато),
фиг. 3б – продолжение процесса абляции и его завершения.
Известна показанная на фиг.2 модель изменения импеданса биологических тканей в процессе нагрева. После начала приложения энергии к биологическим тканям, импеданс обрабатываемой области по мере роста температуры снижается, затем достигает локального минимума, и впоследствии по мере коагуляции белков и высушивания ткани начинает расти. Участок 1: нагрев ткани и снижение импеданса. Участок 2: постоянный импеданс, выравнивание температуры, прогрев участков с низкой температурой. Участок 3: увеличение импеданса.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предлагаемое устройство для абляции биологических тканей содержит (Фиг. 1) блок питания 1, соединенный с высокочастотным генератором 2, системой управления 3 и дисплеем 4, а также содержит выходную цепь 5 для согласования генератора 2 с рабочим инструментом для абляции и датчик напряжения 6 и датчик тока 7, подключённые к выходной цепи 5 и соединенные с системой управления 3.
Блок питания 1: входное напряжение - 230 Вольт, 50 Герц, выходные напряжения: +60 Вольт, 1.2А, +15В, 300мА, -15В, 300мА, +5В, 500мА, +3,3В, 500мА.
Высокочастотный генератор 2 должен быть способным работать с диапазоном активных нагрузок от 10 до 400 Ом в биполярном режиме. Обеспечивать мощности: от 1 до 35 Вт., в соответствии с управляющими сигналами системы управления. Выходная мощность не более 35 Вт на нагрузке 110 Ом. Максимальное напряжение на нагрузке не более 65 В. Форма сигнала – квазисинусоида, частота 440 КГц, допустимое отклонение частоты 11 КГц.
Дисплей 4 отображает цифровую, цифробуквенную и графическую информацию о ходе воздействия.
Выходная цепь 5 предназначена для фильтрации выходного напряжения и согласования с инструментом.
Датчик напряжения 6 предназначен для непрерывного преобразования текущего значения измеряемого напряжения переменного тока частотой 440кГц в аналоговый сигнал и обеспечивает гальваническую развязку от измеряемой цепи. Должен обеспечивать возможность измерения напряжений в интервале 0-100 В.
Датчик тока 7 предназначен для непрерывного преобразования текущего значения силы измеряемого переменного тока частотой 440кГц в аналоговый сигнал и обеспечивает гальваническую развязку от измеряемой цепи. Должен обеспечивать возможность измерения тока в интервале 0-1 А.
Система управления 3 оценивает сигналы датчика напряжения 6 и датчика тока 7, и на основе полученных данных, вырабатывает управляющий сигнал для генератора 2 высокой частоты. В соответствии с алгоритмом определения достижения эффекта трансмуральности (фиг. 3) определяет момент достижения трансмуральности, вырабатывает сигнал на отключение генератора 2, выдает звуковой сигнал для оповещения хирурга о достижении трансмуральности, отображает на дисплее 4 информацию о достижении трансмуральности.
В качестве инструмента использовали электроды для биполярной хирургической абляции. Материал электродов – контакт – бронза или иной электропроводящий материал. Конструкция электродов обеспечивает абляцию ткани на всем протяжении электрода. Длина проводящей части электрода, находящейся в контакте с тканью -70мм.
Для проведения абляции два электрода инструмента размещают в контакте с поверхностью биологической ткани таким образом, чтобы обрабатываемая ткань находилась между электродами; и между электродами и тканью обеспечивался надёжный электрический контакт.
После инициализации микропроцессора системы управления 3 первоначально на инструмент подают от генератора 2 высокочастотное напряжение от 5 до 25 В, предпочтительно 10 вольт, и определяют в первые 3 секунды начальный импеданс Zнач обрабатываемой ткани и проверяют соответствие вычисленного значения импеданса разрешенному диапазону. Если вычисленный импеданс находится в диапазоне от 20 до 300 Ом, лучше от 40 до 200 Ом продолжают подачу напряжения.
С момента начала абляции через промежутки времени dt равные 100мс, в соответствии с первым участком графика приведенного на фиг. 2 (точка t0), микропроцессор начинает вычисление значения импеданса ткани Z и скорости его изменения, мощности W и скорости её изменения, а также подсчет отданной в нагрузку энергии E.
Экспериментально установлено, что в начале абляции для поддержания скорости изменения импеданса 5% в секунду, достаточно небольшой скорости изменения мощности, например увеличения мощности на 1Вт/с. По мере нагревания ткани, для поддержания скорости снижения импеданса, 5% в секунду требуется большее приращение мощности, например, 3Вт/с.
Для вычисления микропроцессором скорости изменения импеданса в зависимости от Zнач (dZ/dt*k1) и заданного значения скорости снижения импеданса равным 5% устанавливают k1=0.005.
Для заявленного диапазона значений скорости снижения импеданса от 2 до 10% в секунду k1 = от 0.002 до 0.01 при dt = 0.1 cекунды.
А также устанавливают значение k5=0.3 для контроля текущей скорости изменения мощности в зависимости от заданного значения скорости изменения мощности равного 3Вт/с. Возможный диапазон значений k5 = от 0.1 до 0.5.
Энергия E равна 1/10 суммы мгновенных значений мощности W через промежутки времени dt=0.1 секунды.
Также микропроцессор, с момента начала абляции, вычисляет скорость изменения подаваемой на инструмент мощности dW/dt и регулирует мощность для поддержания заданной скорости снижения импеданса, вычисляя мощность по формуле:
W=W±(Zнач*k1-dZ)*k2, где k1=0.005 для заданной скорости 5% в секунду, dZ - изменение импеданса за время dt, k2 от 0.2 до 1– шаг изменения мощности.
Если скорость снижения dZ/dt выше 5% в секунду, микропроцессор уменьшает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду. Если скорость снижения импеданса dZ/dt ниже 5% в секунду, микропроцессор увеличивает мощность пропорционально отклонению скорости до восстановления скорости снижения импеданса на уровне 5% в секунду и далее управляет мощностью, поддерживая скорость падения импеданса неизменной на уровне, 5% в секунду.
При значении импеданса Z меньше, чем вычисленное по формуле Z=0.75*Zнач. микропроцессор вычисляет значение полной энергии Eп, необходимой для достижения трансмуральности поражения ткани по формуле: Eп =Е*k3, где k3 от 2 до 5– коэффициент полной энергии.
Одновременно микропроцессор рассчитывает максимально допустимую мощность Wмакс по формуле: Wмакс = W*k4, где k4 –коэффициент мощности равный 4. Возможный диапазон значений коэффициента мощности от 3 до 6.
Экспериментально установлено, что во время абляции импеданс Z снижается до 50% и более от начального импеданса Zнач. Точка t1 на графике Фиг. 2 выбрана на уровне 75% от Zнач, примерно в середине максимального диапазона изменения импеданса.
В точке t1 выделенная энергия E равна от 20% до 50% полной энергии, необходимой для достижения трансмуральности. Поэтому возможный диапазон значений k3 от 2 до 5.
В точке t1 мощность W равна от 15% до 30% максимально допустимой мощности W макс для данного объема ткани. Поэтому k4 выбирается в диапазоне от 3 до 6.
При приближении импеданса Z к минимальному значению (плато – точка на фиг. 2), скорость возрастания мощности может превышать 3Вт/с. Поэтому k5 выбирается в диапазоне от 0.1 до 0.5.
При значении скорости изменения мощности dW/dt больше заданного значения 3Вт/с переходят в режим поддержания постоянного уровня импеданса (выход на плато), путем регулирования мощности, увеличения или уменьшения её в зависимости от колебаний импеданса Z, чтобы не допустить чрезмерного нагрева ткани.
Различная плотность тока в ткани приводит к неравномерному выделению энергии и разной температуре участков ткани. Для компенсации разницы температур необходимо некоторое время поддерживать ткань при достигнутой максимальной температуре. Поддерживая импеданс на неизменном уровне регулировкой мощности, аппарат поддерживает среднюю температуру ткани неизменной. При этом происходит перераспределение и выравнивание температуры между соседними участками ткани вследствие теплопередачи.
Предпочтительное заданное время после осуществления перехода в режим поддержания постоянного уровня импеданса составляет не более 10 секунд.
Микропроцессор выводит сообщение о достижении трансмурального поражения ткани и прекращает работу генератора:
1. При выделении полной энергии Eп в нагрузку;
2. При увеличении мощности выше W макс;
3. По истечении заданного времени, формируемого таймером 2 (алгоритм на фиг.3), после осуществления перехода в режим поддержания постоянного уровня импеданса.
Для защиты от чрезмерного нагрева и повреждения ткани генератор выключается по истечении 40 секунд, формируемых таймером 1 (алгоритм на фиг. 3) от начала абляции независимо от других критериев.
Способ лечения фибрилляции предсердий у пациентов с артериальной гипертензией
Устройство управления двухкоординатным пьезокерамическим оптическим дефлектором

