Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
[0001] Изобретение относится к устройству управления для гибридного транспортного средства и к способу управления гибридным транспортным средством, которые выполняют управление уменьшением влияния колебания скорости вращения двигателя внутреннего сгорания.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] В публикации нерассмотренной заявки на патент Японии № 2010-274875 (JP 2010-274875 А) раскрыт способ уменьшения колебания скорости вращения, обусловленного циклом сгорания двигателя внутреннего сгорания. В документе JP 2010-274875 A был предложен способ корректировки целевой скорости вращения на основе колебания скорости вращения, обусловленного крутящим моментом, который подается на электродвигатель (то есть крутящий момент для уменьшения колебания скорости вращения двигателя внутреннего сгорания), и выполнения управления с обратной связью, в котором колебание скорости вращения двигателя внутреннего сгорания уменьшается с использованием крутящего момента, который выводится от электродвигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Скорости вращения двигателя внутреннего сгорания и электродвигателя управляются, например, электронным блоком управления (ECU), но ECU, который управляет скоростью вращения двигателя внутреннего сгорания, и ECU, который управляет скоростью вращения электродвигателя, могут быть обеспечены отдельно, чтобы избежать увеличения размера ECU. В качестве альтернативы блок управления, который управляет скоростью вращения двигателя внутреннего сгорания, и блок управления, который управляет скоростью вращения электродвигателя, могут быть отдельно обеспечены в одном и том же аппаратном обеспечении. В этом случае, поскольку ECU или блоки управления независимы друг от друга, может произойти отклонение от целевой скорости вращения, задержка отклика или т. п., а также крутящий момент двигателя внутреннего сгорания и крутящий момент электродвигателя конфликтуют друг с другом (то есть элементы управления оказывают влияние друг на друга), в результате чего не может быть выполнено соответствующее управление. В частности, есть вероятность того, что произойдет навязывание управления, чрезмерное увеличение или уменьшение крутящего момента двигателя внутреннего сгорания, ошибочное обучение при обучении управлению или т. п.
[0004] Изобретение обеспечивает устройство управления для гибридного транспортного средства и способ управления гибридным транспортным средством, которые могут соответствующим образом уменьшать влияние колебания скорости вращения двигателя внутреннего сгорания.
[0005] Первый аспект изобретения обеспечивает устройство управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя двигатель внутреннего сгорания и электродвигатель. Контроллер включает в себя первый контроллер и второй контроллер. Первый контроллер выполнен с возможностью выполнения первого управления побуждением приближения скорости вращения двигателя внутреннего сгорания к целевой скорости вращения. Второй контроллер выполнен с возможностью выполнения второго управления уменьшением вибрации, обусловленной колебанием скорости вращения двигателя внутреннего сгорания, путем управления крутящим моментом, который выводится от электродвигателя, соединенного с двигателем внутреннего сгорания. Второй контроллер выполнен с возможностью управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, не выводится в первой области частот, которая представляет собой диапазон частот управления первого управления, и с возможностью управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, выводится во второй области частот, которая выше первой области частот.
[0006] В устройстве управления для гибридного транспортного средства в соответствии с изобретением крутящий момент, связанный со вторым управлением уменьшением вибрации, обусловленной колебанием скорости вращения двигателя внутреннего сгорания, не выводится от электродвигателя в первой области частот, которая представляет собой диапазон частот управления первого управления побуждением приближения скорости вращения двигателя внутреннего сгорания к целевой скорости вращения. С другой стороны, крутящий момент, связанный со вторым управлением, выводится от электродвигателя во второй области частот, которая выше диапазона частот управления первого управления. «Диапазон частот управления» относится к диапазону частот, в котором функция передачи при управлении (то есть функция передачи системы, которая выполняет управление) имеет высокую чувствительность. Как правило, первое управление имеет большой коэффициент передачи при относительно низкой частоте (например, постоянный ток до 1 Гц).
[0007] Когда вывод крутящего момента, связанного со вторым управлением, переключается между первой областью частот и второй областью частот, как описано выше, частота управления первого управления и частота управления второго управления не перекрываются друг с другом, и, таким образом, можно избежать взаимного влияния между первым управлением и вторым управлением. Соответственно, можно избежать проблемы, которая происходит из-за взаимного влияния между первым управлением и вторым управлением и соответственно уменьшить влияние колебания скорости вращения двигателя внутреннего сгорания.
[0008] В устройстве управления вторая область частот может включать в себя резонансную частоту приводной системы, включающей в себя двигатель внутреннего сгорания и электродвигатель.
[0009] В соответствии с этим аспектом, поскольку резонанс приводной системы может подавляться вторым управлением, можно эффективно уменьшать вероятность возникновения вибрации в гибридном транспортном средстве.
[0010] В устройстве управления второй контроллер может быть выполнен с возможностью получения сигнала скорости вращения, указывающего колебание скорости вращения электродвигателя с течением времени. Второй контроллер может быть выполнен с возможностью выполнения процесса фильтрации отсечения компонента сигнала скорости вращения, соответствующего первой области частот, и передачи компонента, соответствующего второй области частот. Второй контроллер может быть выполнен с возможностью определения крутящего момента, связанного со вторым управлением, на основе сигнала скорости вращения, подвергнутого процессу фильтрации.
[0011] В соответствии с этим аспектом, поскольку компонент, соответствующий первой области частот в сигнале скорости вращения, указывающем колебание скорости вращения электродвигателя с течением времени, отсекается, крутящий момент, связанный со вторым управлением, соответствующим первой области частот, не вычисляется, и поэтому крутящий момент, связанный со вторым управлением, не выводится в первой области частот. С другой стороны, поскольку передается компонент, соответствующий второй области частот, крутящий момент, связанный со вторым управлением, выводится во второй области частот. В результате можно надлежащим образом избежать взаимного влияния между первым управлением и вторым управлением.
[0012] В устройстве управления второй контроллер может быть выполнен с возможностью получения сигнала скорости вращения, указывающего колебание скорости вращения электродвигателя с течением времени. Второй контроллер может быть выполнен с возможностью определения колебания углового ускорения путем дифференцирования сигнала скорости вращения. Второй контроллер может быть выполнен с возможностью определения крутящего момента, связанного со вторым управлением, на основе колебания углового ускорения.
[0013] В соответствии с этим аспектом колебание углового ускорения, соответствующее второй области частот, в которой частота является относительно высокой, определяется путем дифференцирования сигнала скорости вращения. Поскольку частота колебания углового ускорения электродвигателя является относительно высокой (в частности, высокой в первой области частот), крутящий момент, связанный со вторым управлением, соответствующим первой области частот, не выводится путем определения крутящего момента, связанного со вторым управлением, на основе определенного колебания углового ускорения, и, следовательно, крутящий момент, связанный со вторым управлением, не выводится в первой области частот. С другой стороны, крутящий момент, связанный со вторым управлением, выводится во второй области частот, соответствующей угловому ускорению электродвигателя. В результате можно надлежащим образом избежать взаимного влияния между первым управлением и вторым управлением.
[0014] В устройстве управления второй контроллер может быть выполнен с возможностью вычисления колебания крутящего момента при кручении на одном из входного вала и демпфера, соединенного с двигателем внутреннего сгорания, на основе величины деформации, обусловленной кручением одного из входного вала и демпфера. Второй контроллер может быть выполнен с возможностью определения крутящего момента, связанного со вторым управлением, на основе колебания крутящего момента при кручении.
[0015] В соответствии с этим аспектом определяется колебание крутящего момента при кручении, соответствующее второй области частот, в которой частота является относительно высокой. Поскольку частота колебания крутящего момента при кручении является относительно высокой (в частности, первая область частот выше), крутящий момент, связанный со вторым управлением, соответствующим первой области частот, не выводится путем определения крутящего момента, связанного со вторым управлением, на основе определенного колебания крутящего момента при кручении, и, таким образом, крутящий момент, связанный со вторым управлением, не выводится в первой области частот. С другой стороны, крутящий момент, связанный со вторым управлением, выводится во второй области частот, соответствующей колебанию крутящего момента при кручении. В результате можно надлежащим образом избежать взаимного влияния между первым управлением и вторым управлением.
[0016] Второй аспект изобретения обеспечивает устройство управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя двигатель внутреннего сгорания и электродвигатель. Устройство управления включает в себя по меньшей мере один электронный блок управления. По меньшей мере один электронный блок управления выполнен с возможностью выполнения первого управления побуждением приближения скорости вращения двигателя внутреннего сгорания к целевой скорости вращения. По меньшей мере один электронный блок управления выполнен с возможностью выполнения второго управления уменьшением вибрации, обусловленной колебанием скорости вращения двигателя внутреннего сгорания, путем управления крутящим моментом, который выводится от электродвигателя, соединенного с двигателем внутреннего сгорания. По меньшей мере один электронный блок управления выполнен с возможностью управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, не выводится в первой области частот, которая представляет собой диапазон частот управления первого управления. По меньшей мере один электронный блок управления выполнен с возможностью управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, выводится во второй области частот, которая выше первой области частот.
[0017] Третий аспект изобретения обеспечивает способ управления гибридным транспортным средством. Гибридное транспортное средство включает в себя двигатель внутреннего сгорания, электродвигатель и по меньшей мере один электронный блок управления. Способ управления включает в себя этапы, на которых: выполняют посредством по меньшей мере одного электронного блока управления первое управление побуждением приближения скорости вращения двигателя внутреннего сгорания к целевой скорости вращения; выполняют посредством по меньшей мере одного электронного блока управления второе управление уменьшением вибрации, обусловленной колебанием скорости вращения двигателя внутреннего сгорания, путем управления крутящим моментом, который выводится от электродвигателя, соединенного с двигателем внутреннего сгорания; управляют посредством по меньшей мере одного электронного блока управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, не выводится в первой области частот, которая представляет собой диапазон частот управления первого управления; и управляют посредством по меньшей мере одного электронного блока управления электродвигателем таким образом, что крутящий момент, связанный со вторым управлением, выводится во второй области частот, которая выше первой области частот.
[0018] Операции и другие преимущества изобретения станут очевидными из вариантов осуществления изобретения, которые будут описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопроводительные чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой структурную схему, иллюстрирующую конфигурацию устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления;
Фиг. 2 представляет собой структурную схему, иллюстрирующую конфигурацию блока управления скоростью вращения MG в соответствии с первым вариантом осуществления;
Фиг. 3 представляет собой диаграмму Боде, иллюстрирующую пример функции передачи системы;
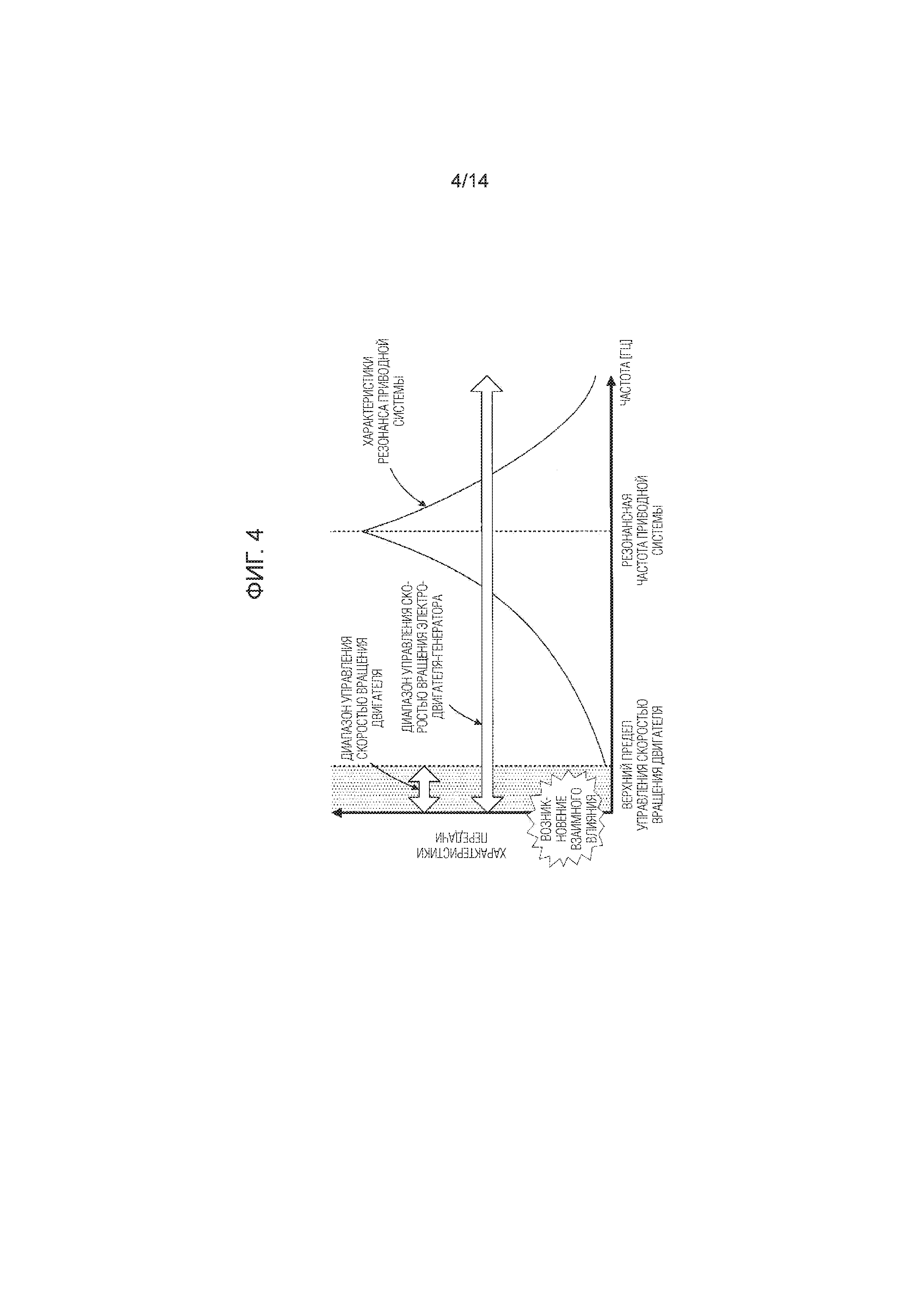
Фиг. 4 представляет собой схему, иллюстрирующую взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG;
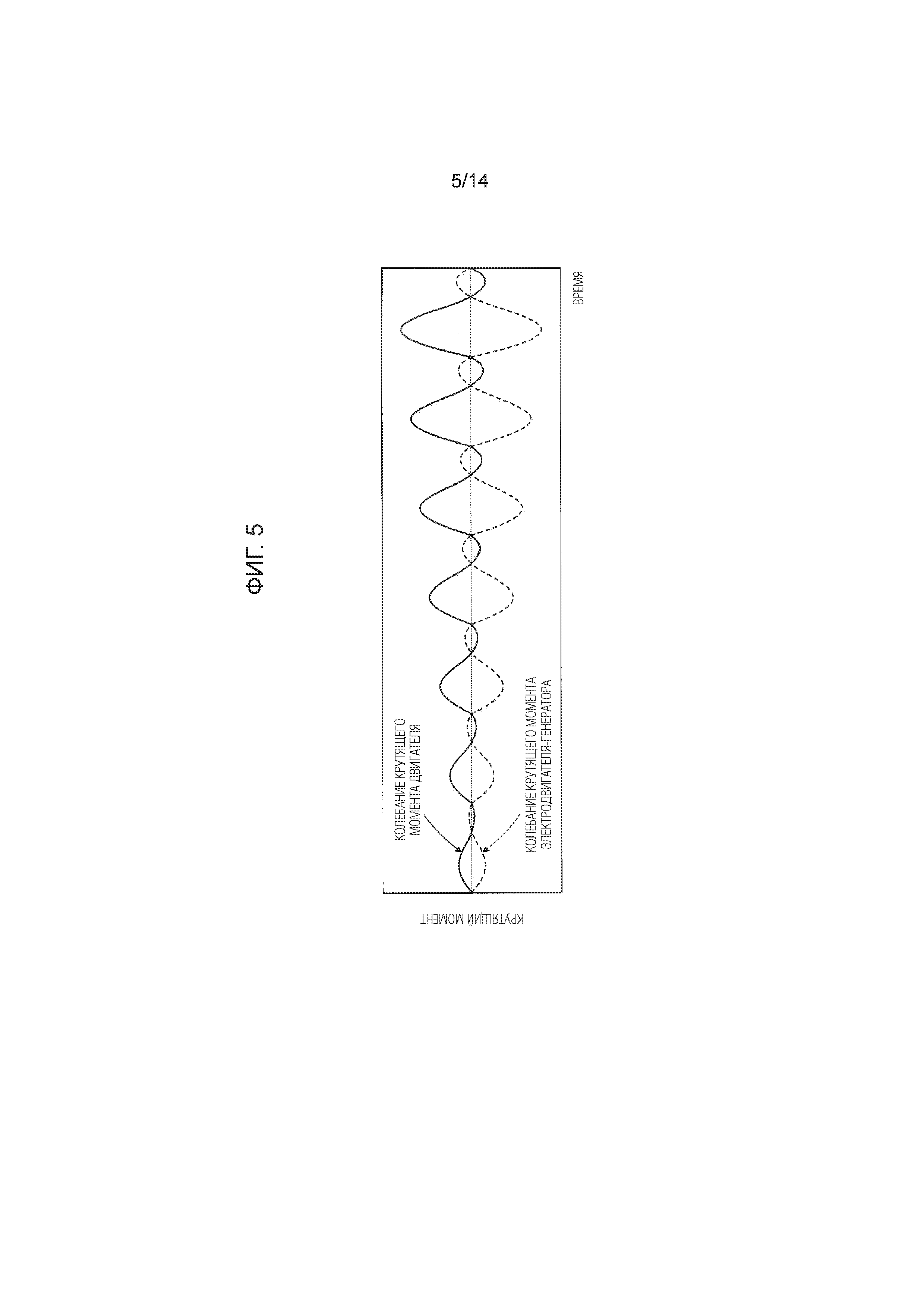
Фиг. 5 представляет собой временную диаграмму, иллюстрирующую увеличение колебания крутящего момента, обусловленного взаимным влиянием между управлениями;
Фиг. 6 представляет собой блок-схему, иллюстрирующую последовательность операций устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления;
Фиг. 7 представляет собой схему, иллюстрирующую характеристики фильтрации блока процесса фильтрации;
Фиг. 8 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и скорости вращения MG, подвергнутое процессу фильтрации;
Фиг. 9 представляет собой структурную схему, иллюстрирующую конфигурацию блока управления скоростью вращения MG в соответствии со вторым вариантом осуществления;
Фиг. 10 представляет собой блок-схему, иллюстрирующую последовательности операций устройства управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления;
Фиг. 11 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и углового ускорения;
Фиг. 12 представляет собой структурную схему, иллюстрирующую конфигурацию блока управления скоростью вращения MG в соответствии с третьим вариантом осуществления;
Фиг. 13 представляет собой блок-схему, иллюстрирующую последовательность операций устройства управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления; и
Фиг. 14 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и крутящего момента при кручении.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0020] Далее варианты осуществления изобретения будут описаны со ссылкой на сопроводительные чертежи.
[0021] Первый вариант осуществления
Устройство управления для гибридного транспортного средства в соответствии с первым вариантом осуществления будет описано ниже со ссылкой на Фиг. 1-8.
[0022] Конфигурация устройства
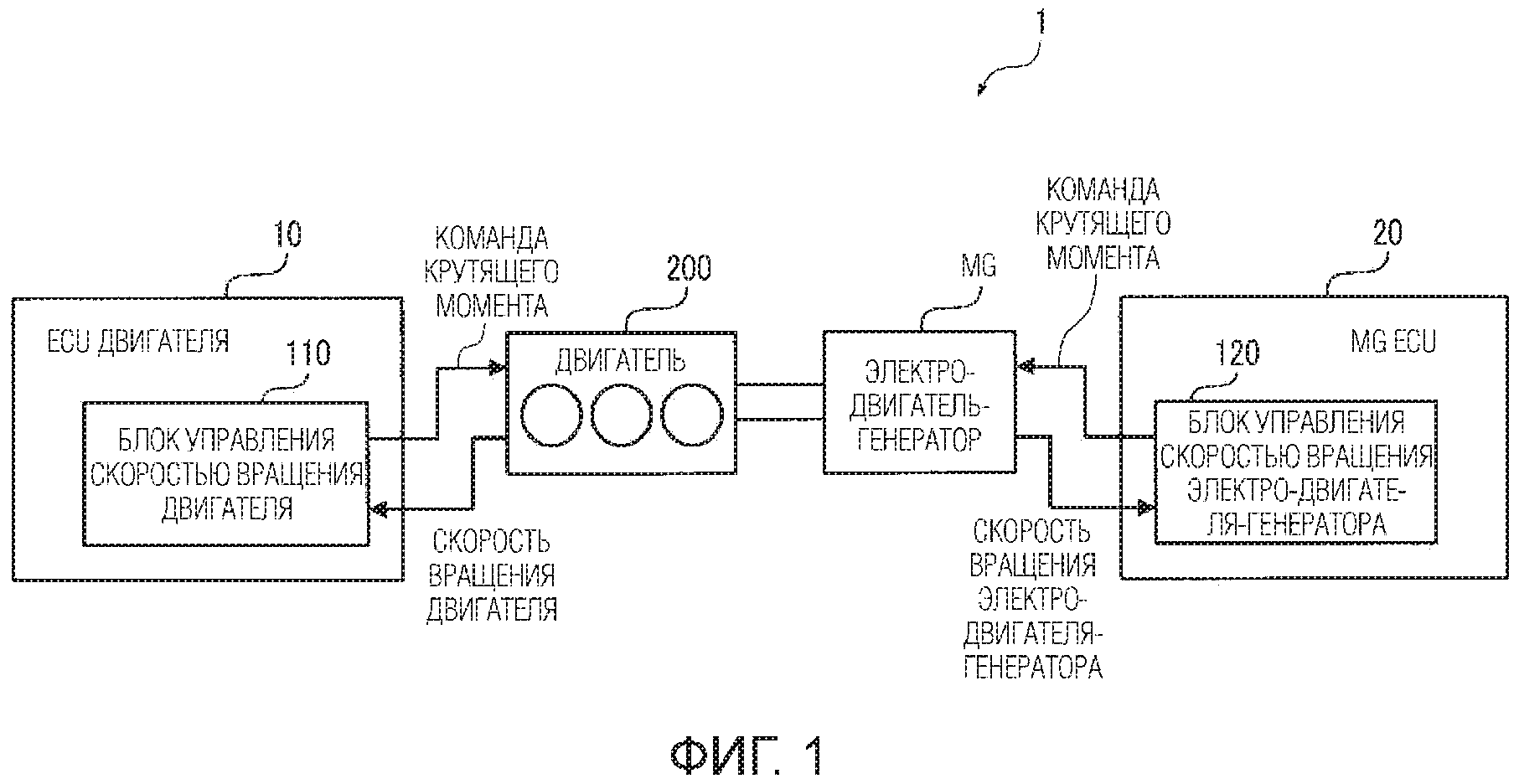
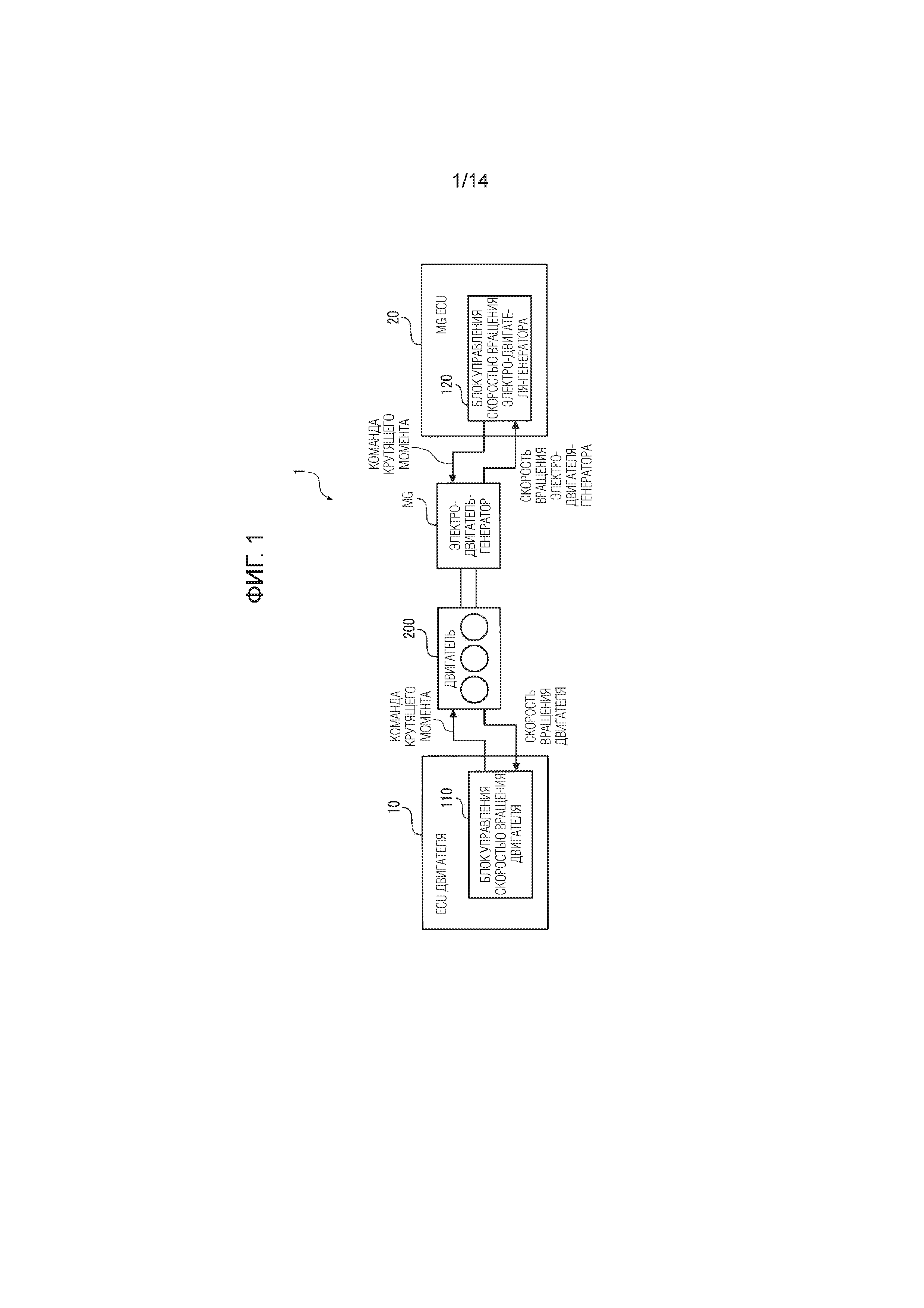
Сначала конфигурация устройства управления для гибридного транспортного средства в соответствии с этим вариантом осуществления будет описана со ссылкой на фиг. 1. Фиг. 1 представляет собой структурную схему, иллюстрирующую конфигурацию устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления.
[0023] Как показано на фиг. 1, устройство управления для гибридного транспортного средства в соответствии с этим вариантом осуществления выполнено с возможностью управления операциями двигателя 200 и электродвигателя-генератора MG, которые установлены в гибридном транспортном средстве. Двигатель 200 является примером «двигателя внутреннего сгорания». Двигатель 200 в соответствии с этим вариантом осуществления представляет собой бензиновый двигатель, который служит в качестве основного источника питания гибридного транспортного средства 1. Электродвигатель-генератор MG является примером «электродвигателя». Электродвигатель-генератор MG представляет собой электродвигатель-генератор, который имеет функцию питания путем преобразования электрической энергии в кинетическую энергию и функцию рекуперации путем преобразования кинетической энергии в электрическую энергию. На фиг. 1 двигатель 200 и электродвигатель-генератор MG проиллюстрированы как соединенные непосредственно друг с другом, но они могут быть соединены, например, через механизм планетарной зубчатой передачи, если он представляет собой конфигурацию, способную передавать крутящий момент между ними.
[0024] Устройство управления для гибридного транспортного средства в соответствии с этим вариантом осуществления включает в себя ECU 10 двигателя, который представляет собой электронный блок управления, который управляет работой двигателя 200, и MGECU 20, который представляет собой электронный блок управления, который управляет работой электродвигателя-генератора MG. В этом варианте осуществления, в частности, ECU 10 двигателя и MGECU 20 выполнены как ECU, которые независимы друг от друга. ECU 10 двигателя и MGECU 20 могут быть технически выполнены как один ECU (то есть общий ECU), но его размер может увеличиться, например, когда один ECU способен выполнять процессы с большими вычислительными нагрузками. Соответственно, устройство управления для гибридного транспортного средства в соответствии с этим вариантом осуществления отдельно включает в себя ECU 10 двигателя, который управляет двигателем 200, и MGECU 20, который управляет электродвигателем-генератором MG. В качестве альтернативы ECU 10 двигателя и MGECU 20 могут быть выполнены как отдельные блоки управления в одном и том же ECU. То есть первое управление и второе управление, которые будут описаны ниже, могут быть реализованы множеством блоков управления или схем управления по меньшей мере в одном ECU.
[0025] ECU 10 двигателя выполняет управление скоростью вращения двигателя (первое управление) путем вывода команды крутящего момента для побуждения приближения скорости вращения двигателя к целевой скорости вращения двигателя на основе полученной скорости вращения двигателя 200 (скорость вращения двигателя). Первое управление реализуется блоком 110 управления скоростью вращения двигателя, показанным на фиг. 1. Блок 110 управления скоростью вращения двигателя представляет собой пример, в котором первое управление, которое выполняется «первым контроллером», выражено в виде блока управления. Блок 110 управления скоростью вращения двигателя побуждает приближение скорости вращения двигателя к целевой скорости вращения двигателя, например, путем управления электронным впрыском топлива (EFI). MGECU 20 выполняет управление скоростью вращения MG (второе управление) путем вывода команды крутящего момента для побуждения приближения скорости вращения MG к целевой скорости вращения MG на основе полученной скорости вращения электродвигателя-генератора MG (скорость вращения MG). Второе управление реализуется блоком 120 управления скоростью вращения MG, показанным на фиг. 1. Блок 120 управления скоростью вращения MG представляет собой пример, в котором второе управление, которое выполняется «вторым контроллером», выражено в виде блока управления. Блок 120 управления скоростью вращения MG может побуждать электродвигатель-генератор MG выводить крутящий момент (в дальнейшем соответственно называемый «крутящим моментом управления вибрацией») для уменьшения влияния колебания скорости вращения двигателя 200 в дополнение к крутящему моменту в качестве источника питания гибридного транспортного средства. Крутящий момент управления вибрацией представляет собой крутящий момент с фазой, противоположной компоненту колебания скорости вращения двигателя 200, и имеет эффект уменьшения вибрации (например, вибрации, соответствующей резонансной частоте приводной системы) гибридного транспортного средства, обусловленной колебанием скорости вращения двигателя 200.
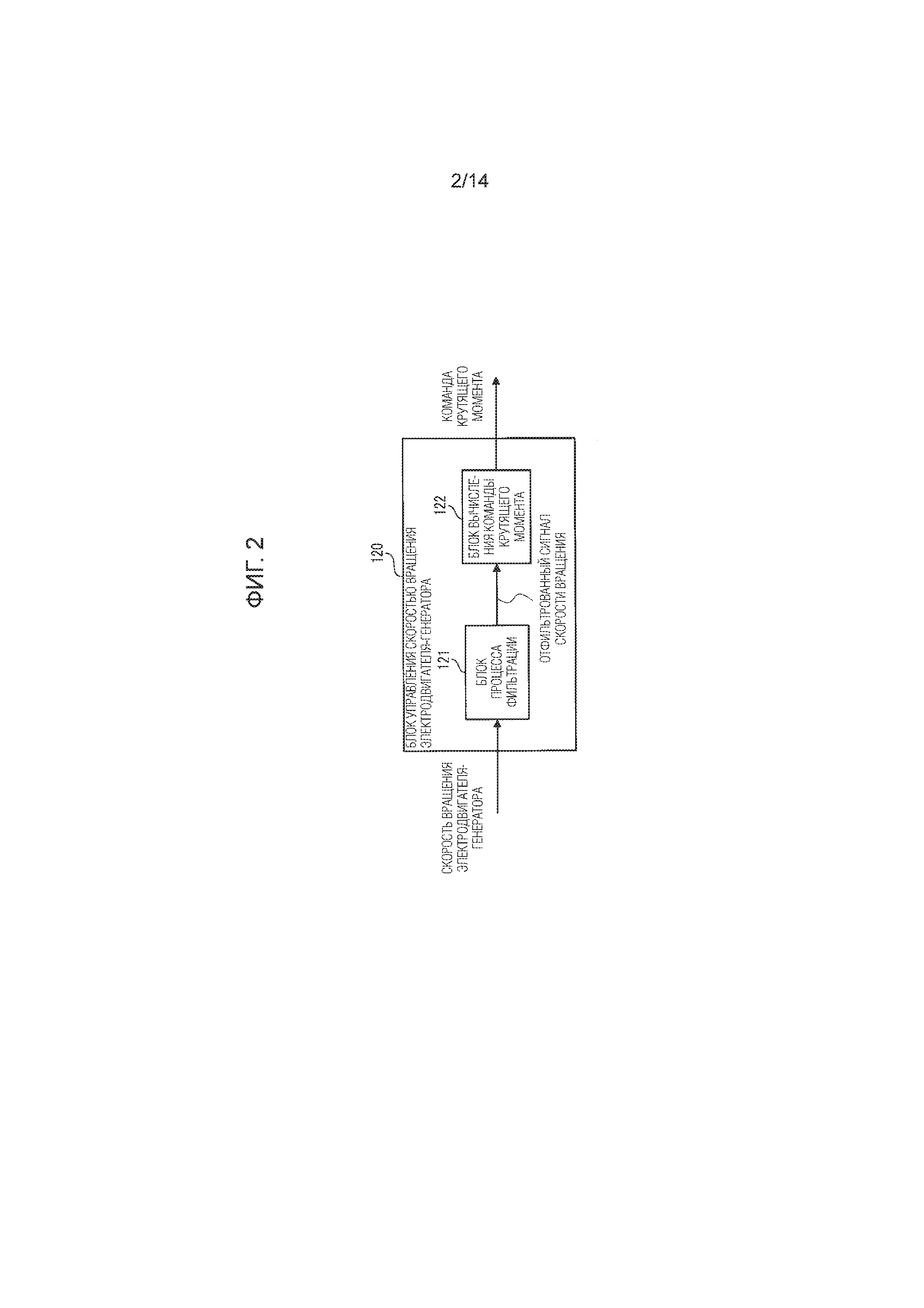
[0026] Конфигурация блока 120 управления скоростью вращения MG конкретно будет описана ниже со ссылкой на фиг. 2. Фиг. 2 представляет собой структурную схему, иллюстрирующую конфигурацию блока 120 управления скоростью вращения MG в соответствии с первым вариантом осуществления.
[0027] Как показано на фиг. 2, блок 120 управления скоростью вращения MG в соответствии с первым вариантом осуществления включает в себя блок 121 процесса фильтрации и блок 122 вычисления команды крутящего момента в качестве реализованных в нем блоков обработки или аппаратного обеспечения. Блок 121 процесса фильтрации получает сигнал скорости вращения MG, указывающий колебание скорости вращения MG с течением времени, и выполняет заданный процесс фильтрации на полученном сигнале скорости вращения MG. Блок 121 процесса фильтрации выполнен с возможностью вывода сигнала скорости вращения MG, подвергнутого процессу фильтрации, в блок 122 вычисления команды крутящего момента. Блок 122 вычисления команды крутящего момента выводит сигнал команды крутящего момента, указывающий крутящий момент, который должен быть выведен от электродвигателя-генератора MG, на основе сигнала скорости вращения MG, подвергнутого процессу фильтрации. Более конкретные детали работы блока 121 процесса фильтрации и блока 122 вычисления команды крутящего момента будут описаны ниже.
[0028] Взаимное влияние между управлениями скоростью вращения
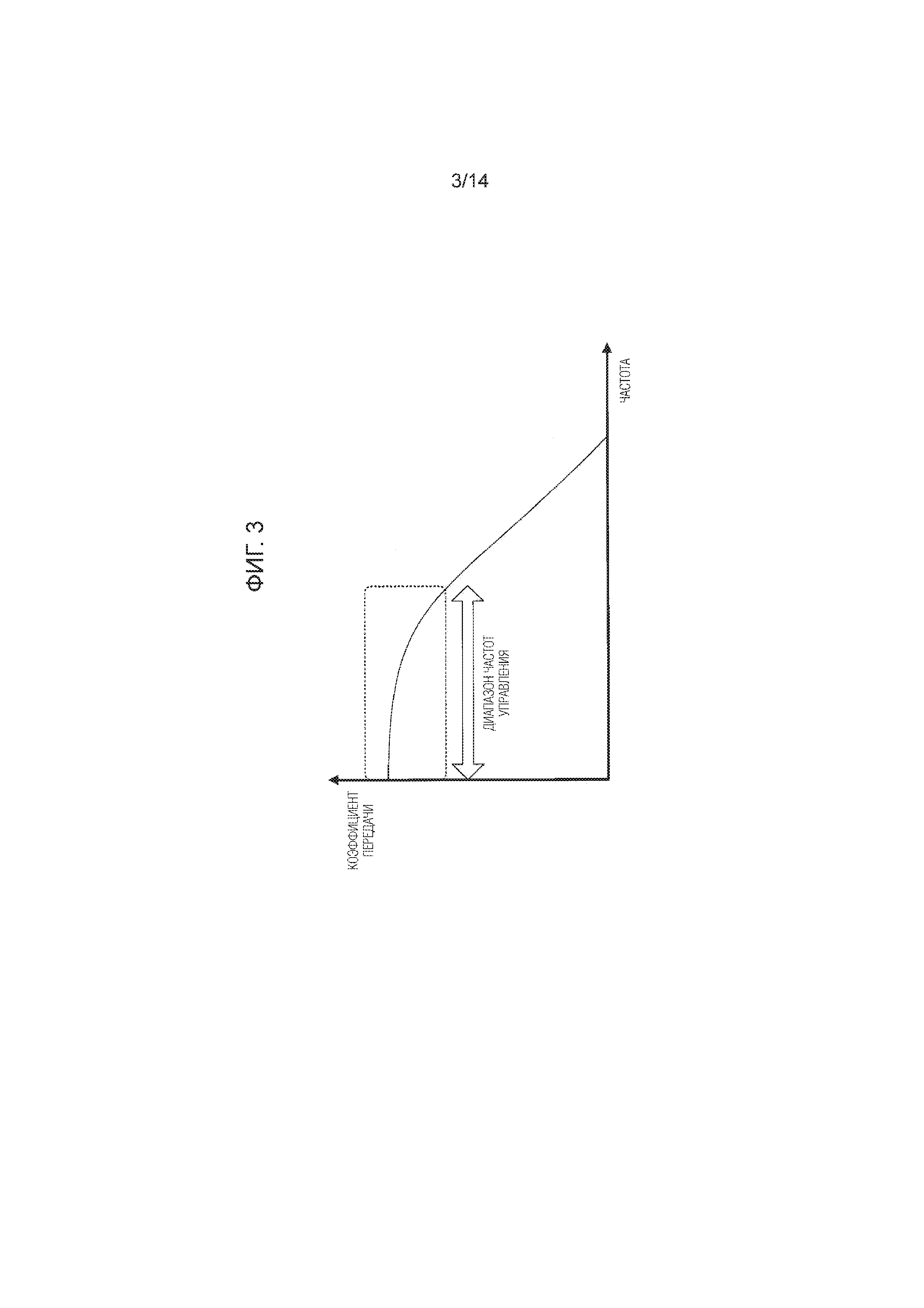
Взаимное влияние между управлением скоростью вращения двигателя, которое выполняется блоком 110 управления скоростью вращения двигателя, и управлением скоростью вращения MG, которое выполняется блоком 120 управления скоростью вращения MG, будет описано ниже со ссылкой на фиг. 3-5. Фиг. 3 представляет собой диаграмму Боде, иллюстрирующую пример функции передачи системы. Фиг. 4 представляет собой схему, иллюстрирующую взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG. Фиг. 5 представляет собой временную диаграмму, иллюстрирующую увеличение колебания крутящего момента, обусловленное взаимным влиянием между управлениями.
[0029] Как показано на Фиг. 3, диапазон частот управления каждого управления определяется как высокочувствительная область функции передачи (в частности, функции передачи, которая определяется в зависимости от спецификаций механической части и программной части для выполнения управления) системы, которая выполняет управление. То есть, подобно части, окруженной пунктирной линией на чертеже, диапазон частот, в котором коэффициент передачи является высоким, определяется как диапазон частот управления.
[0030] В сравнительном примере, показанном на фиг. 4, диапазон частот управления скоростью вращения двигателя представляет собой область относительно низких частот, которая равна или ниже 1 Гц, а диапазон частот управления скоростью вращения MG представляет собой область частот, которая выше, чем диапазон частот управления скоростью вращения двигателя для уменьшения вибрации, обусловленной резонансной частотой (например, 8 Гц) приводной системы. В то же время существует вероятность того, что в области (см. заштрихованную часть на чертеже), в которой диапазон частот управления скоростью вращения двигателя и диапазон частот управления скоростью вращения MG перекрываются друг с другом, будет происходить взаимное влияние между управлениями.
[0031] В частности, ECU 10 двигателя и MGECU 20 выполнены как независимые ECU. Соответственно, при возникновении отделения от целевой скорости вращения или задержки отклика двигателя 200 и электродвигателя-генератора MG, крутящий момент (крутящий момент двигателя), выводимый от двигателя 200, и крутящий момент (крутящий момент МG), выводимый от электродвигателя-генератора MG, конфликтуют друг с другом, и существует проблема возникновения навязывания управления, чрезмерного увеличения или уменьшения крутящего момента двигателя, ошибочного обучения в процессе обучения или т. п. Такая проблема также может возникать, когда ECU 10 двигателя и MGECU 20 выполнены как отдельные блоки управления в одном ECU.
[0032] В примере, показанном на Фиг. 5, ширина колебания крутящего момента двигателя и крутящего момента MG увеличивается с течением времени во время самоподдерживающейся работы (то есть во время работы на холостом ходу) двигателя 200. Это связано с тем, что процесс обратной связи при управлении скоростью вращения двигателя и управлении скоростью вращения MG не может нормально выполняться из-за взаимного влияния между управлениями. Такое чрезмерное увеличение крутящего момента двигателя оказывает отрицательное влияние на управление скоростью вращения двигателя и управление скоростью вращения MG.
[0033] В устройстве управления для гибридного транспортного средства в соответствии с этим вариантом осуществления для решения вышеуказанной проблемы выполняется управление скоростью вращения двигателя и управление скоростью вращения MG с использованием способа, который подробно описан ниже.
[0034] Описание операций
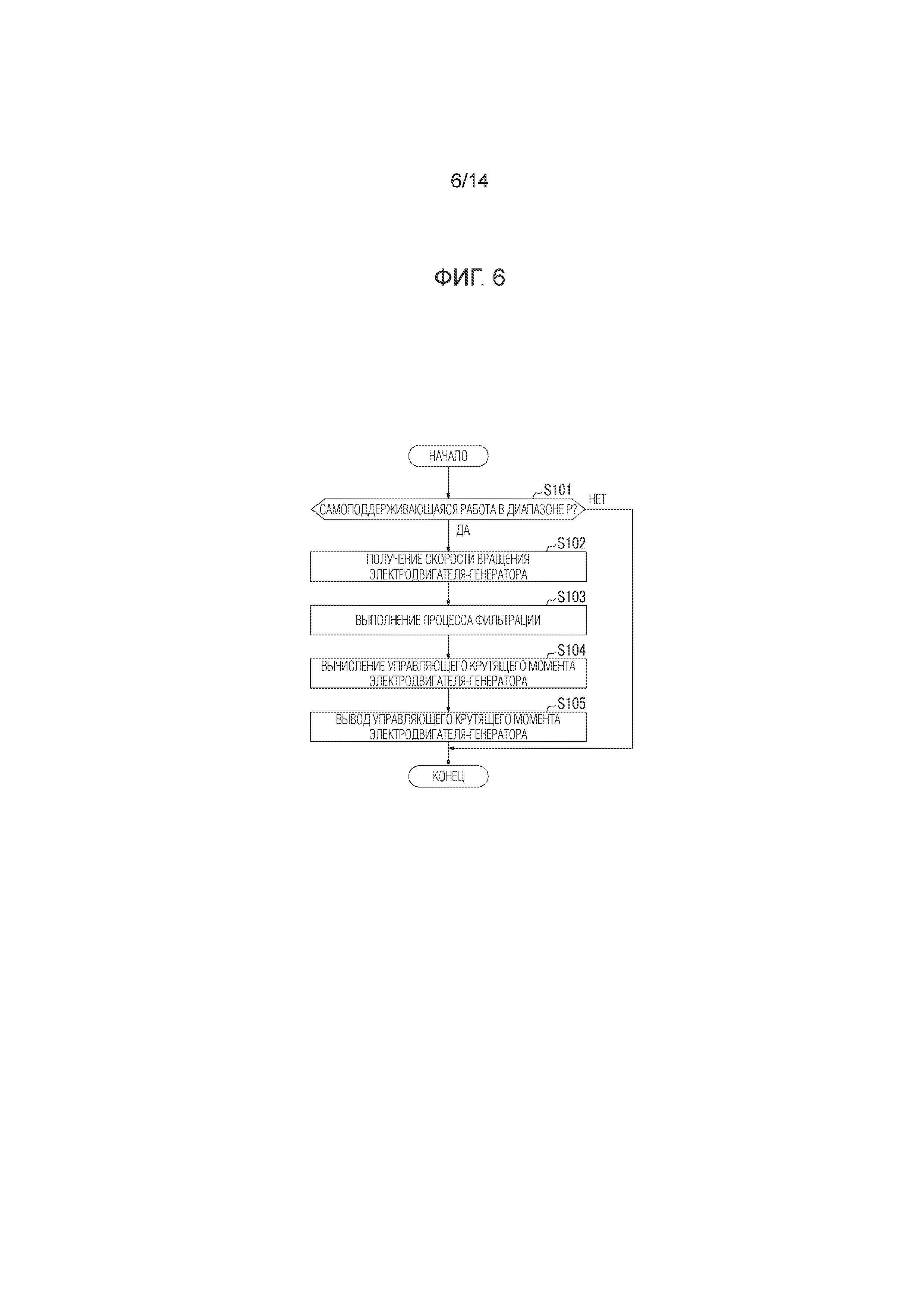
Операции (в частности, операция вывода крутящего момента управления вибрацией блока 120 управления скоростью вращения MG) устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления будут подробно описаны ниже со ссылкой на фиг. 6. Фиг. 6 представляет собой блок-схему, иллюстрирующую последовательность операций устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления.
[0035] На фиг. 6 операция вывода крутящего момента управления вибрацией в соответствии с этим вариантом осуществления выполняется, когда двигатель 200 выполняет самоподдерживающуюся работу в диапазоне Р при управлении скоростью вращения двигателя. Соответственно, когда определено, что двигатель 200 не выполняет самоподдерживающуюся работу в диапазоне Р (НЕТ на этапе S101), последующие процессы не выполняются, и последовательность процессов завершается.
[0036] С другой стороны, когда определено, что двигатель 200 выполняет самоподдерживающуюся работу в диапазоне Р (ДА на этапе S101), блок 121 процесса фильтрации получает сигнал скорости вращения MG, указывающий скорость вращения MG (этап S102). Затем блок 121 процесса фильтрации выполняет заданный процесс фильтрации на полученном сигнале скорости вращения MG (этап S103). Сигнал скорости вращения MG, подвергнутый процессу фильтрации, выводится в блок 122 вычисления команды крутящего момента.
[0037] После этого блок 122 вычисления команды крутящего момента вычисляет управляющий крутящий момент MG на основе сигнала скорости вращения MG, подвергнутого процессу фильтрации (этап S104). То есть вычисляется крутящий момент, побуждающий приближение скорости вращения MG к целевой скорости вращения MG. Вычисленный крутящий момент включает в себя крутящий момент управления вибрацией, и поскольку для вычисления крутящего момента управления вибрацией могут быть соответствующим образом использованы существующие методы, его подробное описание не приведено. Затем блок 122 вычисления команды крутящего момента выводит вычисленный управляющий крутящий момент MG на электродвигатель-генератор MG (этап S105). Соответственно, крутящий момент, включающий в себя крутящий момент управления вибрацией, выводится от электродвигателя-генератора MG.
[0038] Вышеупомянутая последовательность процессов снова начинается с этапа S101 по истечении заданного времени. Соответственно, процессы этапов S102-S105 выполняются при выполнении двигателем 200 самоподдерживающейся работы в диапазоне Р.
[0039] Преимущества варианта осуществления
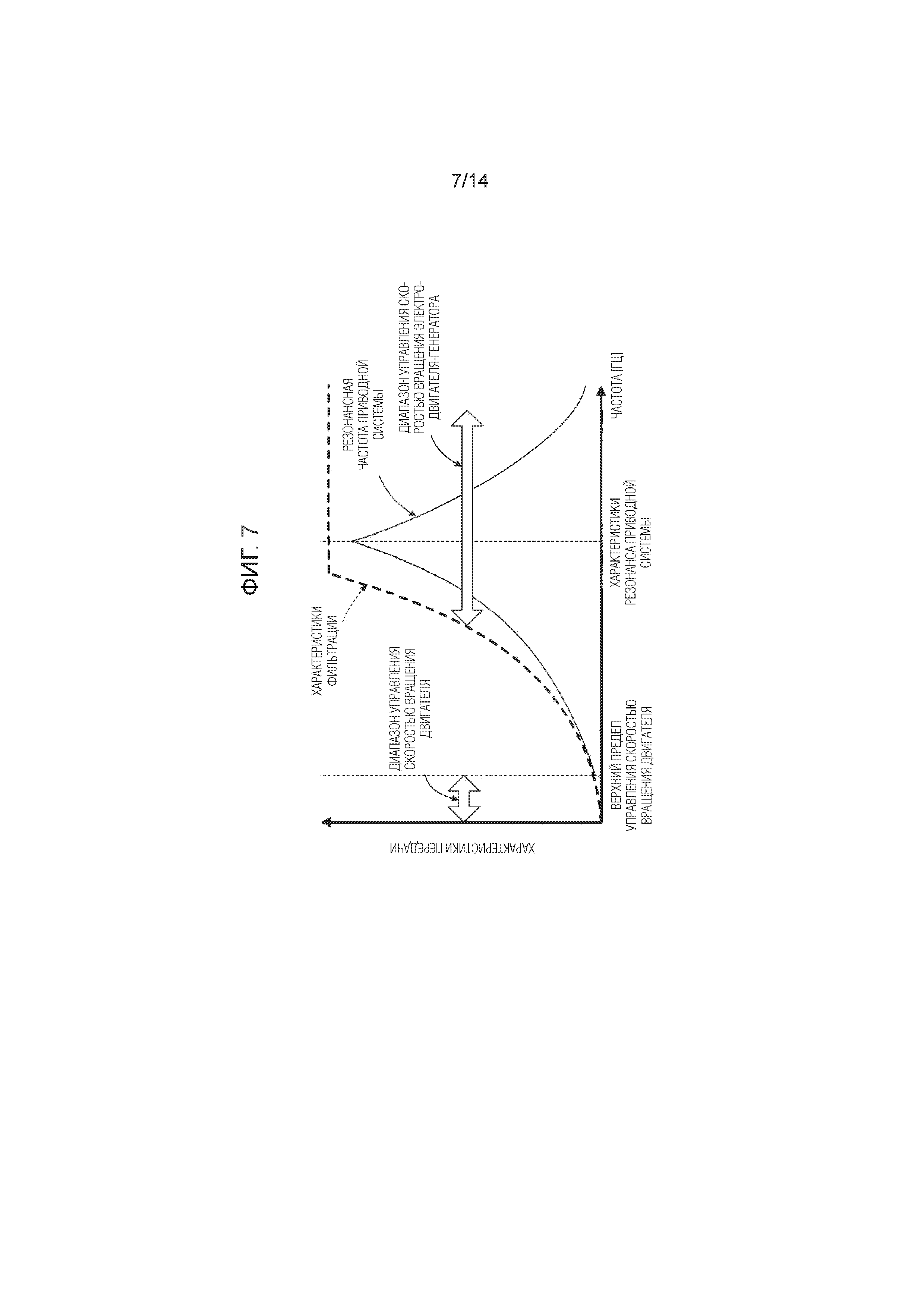
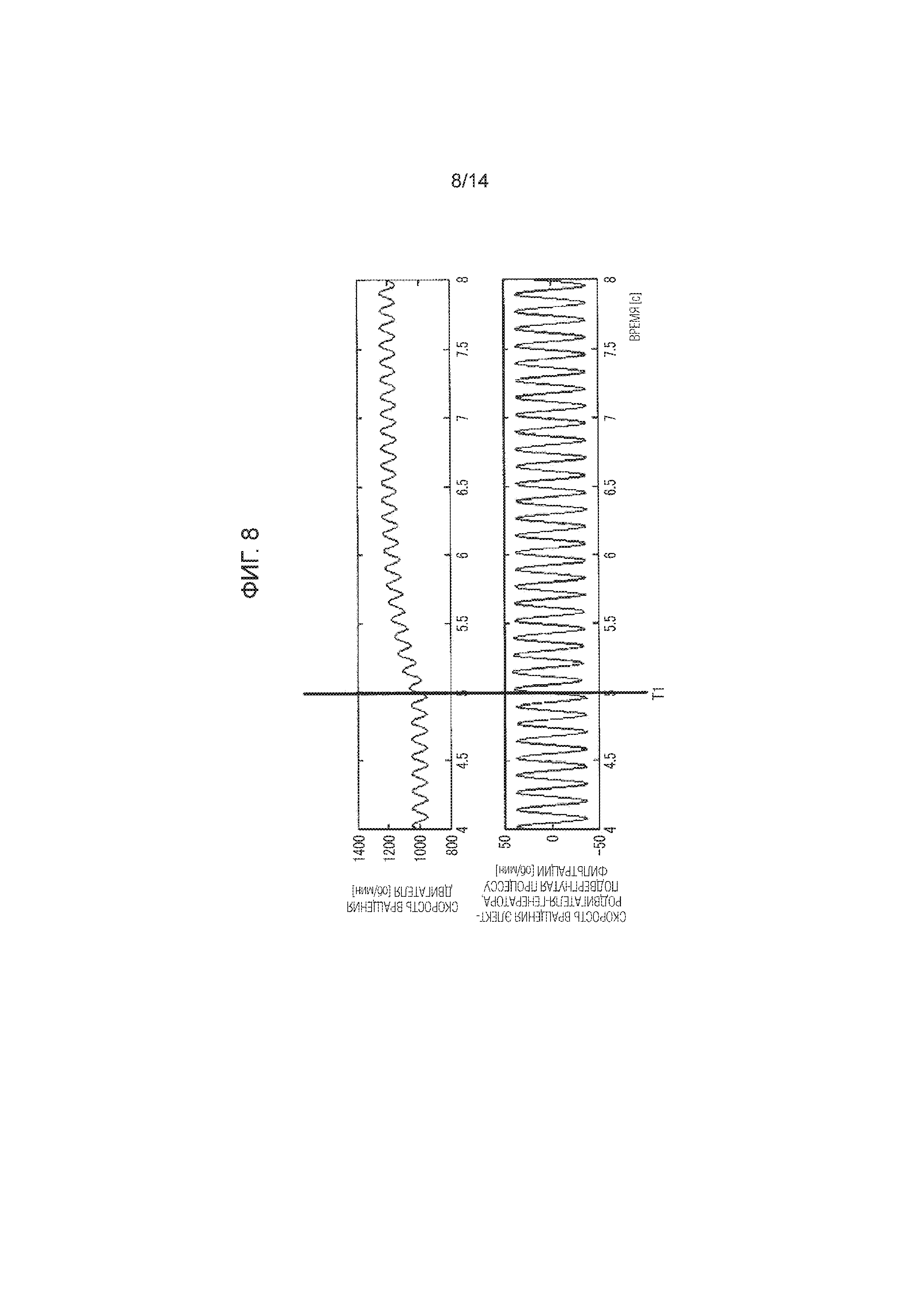
Технические преимущества, полученные в результате работы устройства управления для гибридного транспортного средства в соответствии с первым вариантом осуществления описаны более подробно ниже со ссылкой на фиг. 7 и 8. Фиг. 7 представляет собой схему, иллюстрирующую характеристики фильтрации блока процесса фильтрации. Фиг. 8 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и скорости вращения MG, подвергнутое процессу фильтрации.
[0040] Как показано на Фиг. 7, блок 121 процесса фильтрации имеет характеристики фильтрации, заключающиеся в том, что коэффициент усиления очень мал в диапазоне управления скоростью вращения двигателя (то есть, который представляет собой диапазон частот управления скоростью вращения двигателя и представляет собой область относительно низких частот), и коэффициент усиления увеличивается в зависимости от характеристик резонанса приводной системы. Соответственно, в процессе фильтрации блоком 121 процесса фильтрации компонент, соответствующий области частот диапазона управления скоростью вращения двигателя, отсекается, и передается компонент, соответствующий области частот вблизи резонансной частоты приводной системы. В результате при вычислении управляющего крутящего момента MG на основе сигнала скорости вращения MG, подвергнутого процессу фильтрации, управление скоростью вращения MG выполняется в области частот, не включающей в себя область частот диапазона управления скоростью вращения двигателя, но включающей в себя резонансную частоту приводной системы. Соответственно, можно предотвратить взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG и соответствующим образом уменьшить вибрацию гибридного транспортного средства.
[0041] В примере, показанном на фиг. 7, область частот, в которой не выполняется ни управление скоростью вращения двигателя, ни управление скоростью вращения MG, может иметься или может отсутствовать между диапазоном управления скоростью вращения двигателя и диапазоном управления скоростью вращения MG (то есть диапазоном частот управления скоростью вращения MG). То есть, когда диапазон управления скоростью вращения MG включает в себя резонансную частоту приводной системы, исключая перекрытие диапазона управления скоростью вращения двигателя и диапазона управления скоростью вращения MG, вышеупомянутые технические преимущества могут быть, несомненно, получены.
[0042] В примере, показанном на фиг. 8, целевая скорость вращения двигателя при управлении скоростью вращения двигателя изменяется с 1000 об/мин до 1200 об/мин в момент времени T1. В то же время сигнал скорости вращения MG, подвергнутый процессу фильтрации, практически не изменяется до и после времени T1. Это означает, что только компонент колебания скорости вращения электродвигателя-генератора MG в области, отделенной по частоте от колебания скорости вращения двигателя (то есть колебания с относительно низкой частотой) путем управления скоростью вращения двигателя, может быть извлечен путем выполнения процесса фильтрации верхних частот, показанного на фиг. 7. В частности, компонент диапазона управления скоростью вращения двигателя относительно низких частот отсекается, и извлекается только компонент колебания относительно высоких частот. Соответственно, при вычислении управляющего крутящего момента MG на основе сигнала скорости вращения MG, подвергнутого процессу фильтрации, можно выполнить управление скоростью вращения MG без влияния на управление скоростью вращения двигателя (например, управление сопутствующим колебанием скорости вращения двигателя в области относительно низких частот для соответствия изменению целевой скорости вращения двигателя). Соответственно, можно предотвратить взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG и соответствующим образом уменьшить вибрацию гибридного транспортного средства.
[0043] Второй вариант осуществления
Ниже будет описано устройство управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления. Второй вариант осуществления отличается от первого варианта осуществления только некоторыми конфигурациями и операциями, и оба варианта осуществления равны друг другу в других частях. Соответственно, отличия от вышеупомянутого первого варианта осуществления будут описаны подробно ниже, и описание одних и те же частей не повторяется.
[0044] Конфигурация устройства
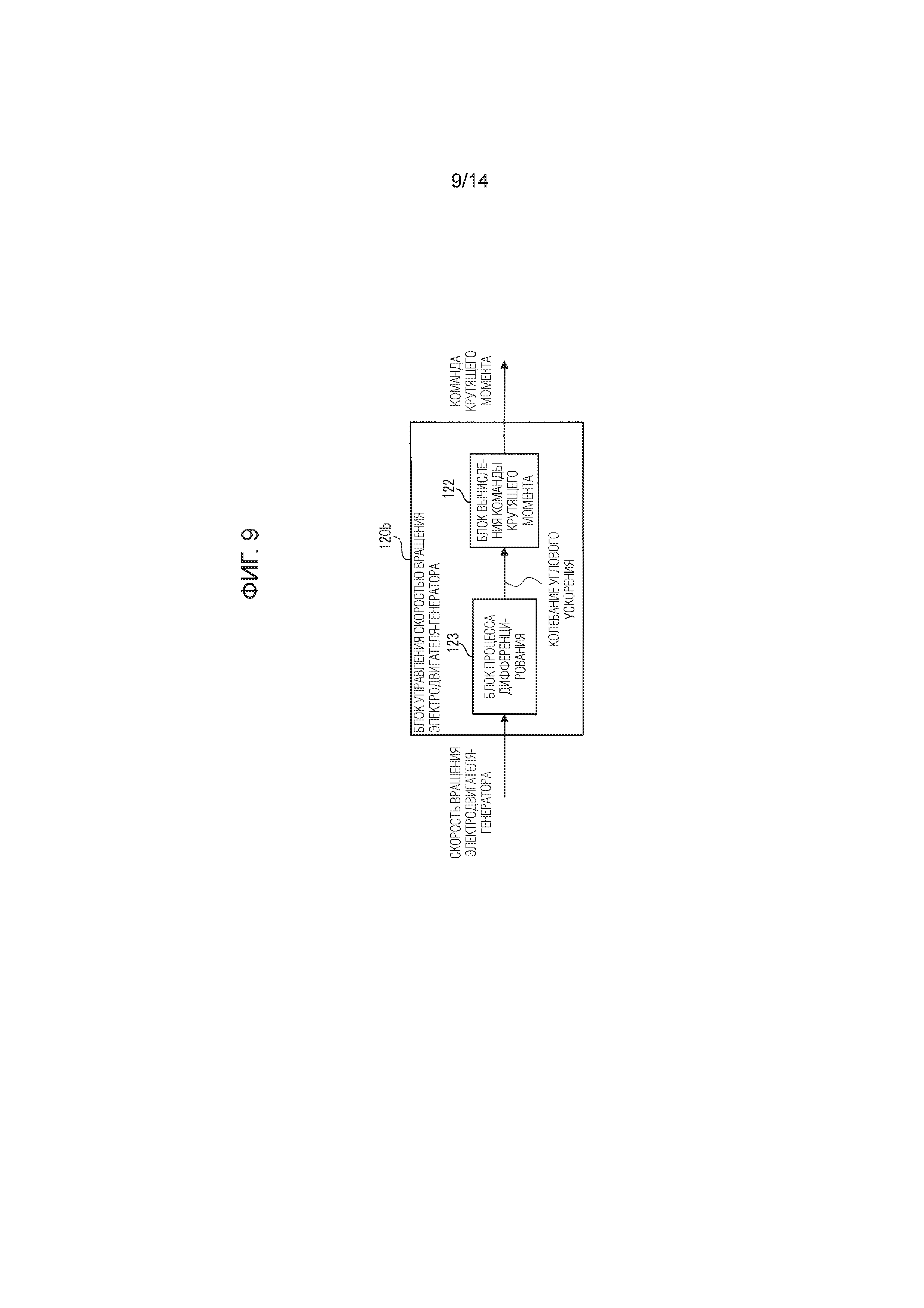
Конфигурация блока управления скоростью вращения MG в соответствии со вторым вариантом осуществления описана ниже со ссылкой на фиг. 9. Фиг. 9 представляет собой структурную схему, иллюстрирующую конфигурацию блока управления скоростью вращения MG в соответствии со вторым вариантом осуществления.
[0045] Как показано на фиг. 9, блок 120b управления скоростью вращения MG в соответствии со вторым вариантом осуществления включает в себя блок 123 процесса дифференцирования и блок 122 вычисления команды крутящего момента в качестве реализованных в нем блоков обработки или аппаратного обеспечения. Блок 123 процесса дифференцирования получает сигнал скорости вращения MG, указывающий колебание скорости вращения MG с течением времени, и выполняет процесс дифференцирования на полученном сигнале скорости вращения MG. В результате процесса дифференцирования сигнал скорости вращения MG становится сигналом, указывающим угловое ускорение электродвигателя-генератора MG. Блок 123 процесса дифференцирования выполнен с возможностью вывода сигнала, указывающего угловое ускорение, в блок 122 вычисления команды крутящего момента. Блок 122 вычисления команды крутящего момента выводит сигнал команды крутящего момента, указывающий крутящий момент, который должен быть выведен от электродвигателя-генератора MG, на основе сигнала, указывающего угловое ускорение.
[0046] Описание операций
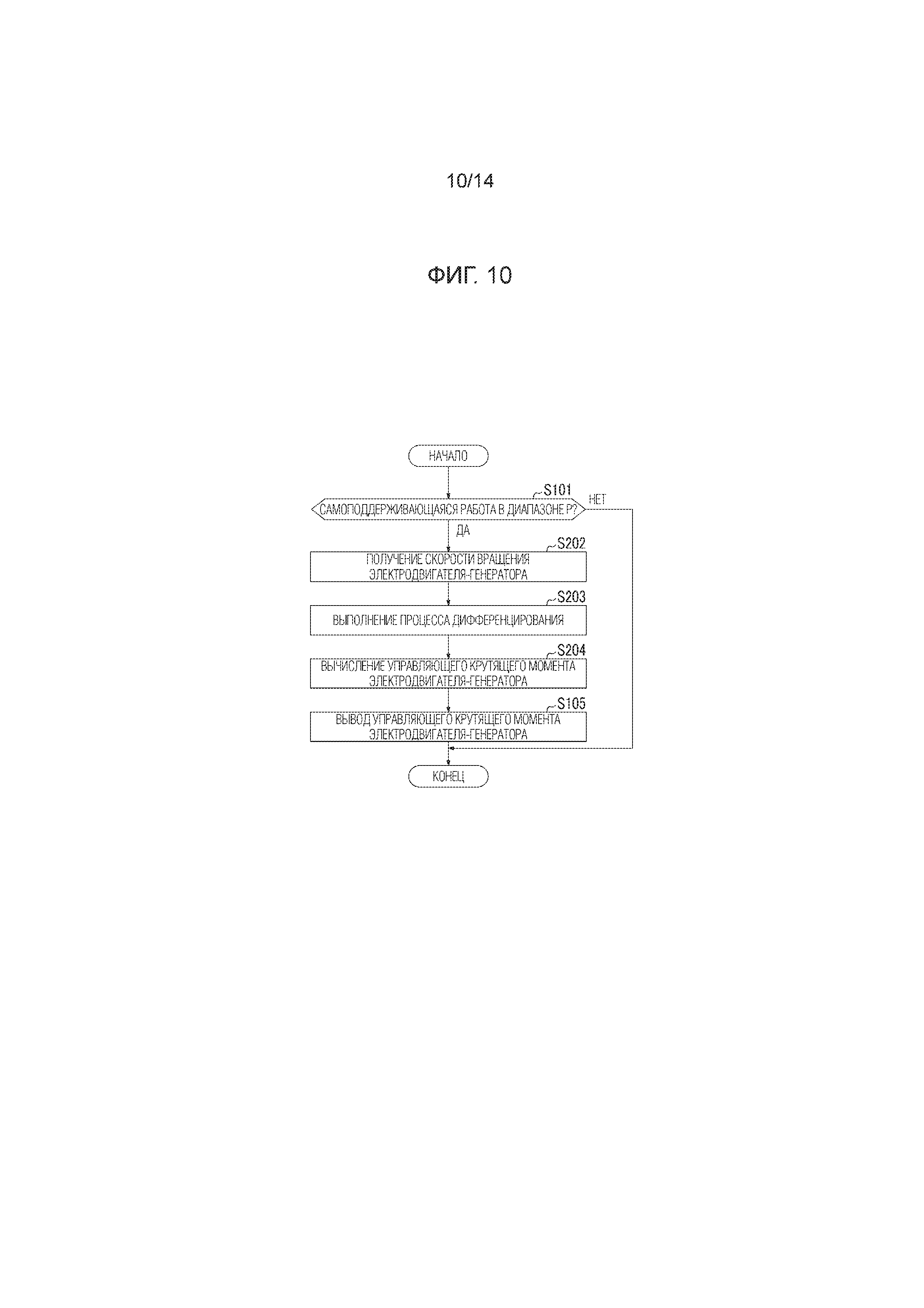
Операции (в частности, операция вывода крутящего момента управления вибрацией, которая выполняется блоком 120b управления скоростью вращения MG) устройства управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления описаны подробно ниже со ссылкой на фиг. 10. Фиг. 10 представляет собой блок-схему, иллюстрирующую последовательность операций устройства управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления.
[0047] На фиг. 10, когда устройство управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления работает, и определено, что двигатель 200 выполняет самоподдерживающуюся работу в диапазоне Р (ДА на этапе S101), блок 123 процесса дифференцирования получает сигнал скорости вращения МG, указывающий скорость вращения MG (этап S202), и выполняет процесс дифференцирования на полученном сигнале скорости вращения MG (этап S203). Сигнал, который был получен в процессе дифференцирования, указывающий угловое ускорение, выводится в блок 122 вычисления команды крутящего момента.
[0048] После этого блок 122 вычисления команды крутящего момента вычисляет управляющий крутящий момент MG, включающий в себя крутящий момент управления вибрацией, на основе сигнала, указывающего угловое ускорение (этап S204). То есть вычисляется крутящий момент для побуждения приближения скорости вращения MG к целевой скорости вращения MG. Затем блок 122 вычисления команды крутящего момента выводит вычисленный управляющий крутящий момент MG на электродвигатель-генератор MG (этап S105). Соответственно, крутящий момент, включающий в себя крутящий момент управления вибрацией, выводится от электродвигателя-генератора MG.
[0049] Преимущества варианта осуществления
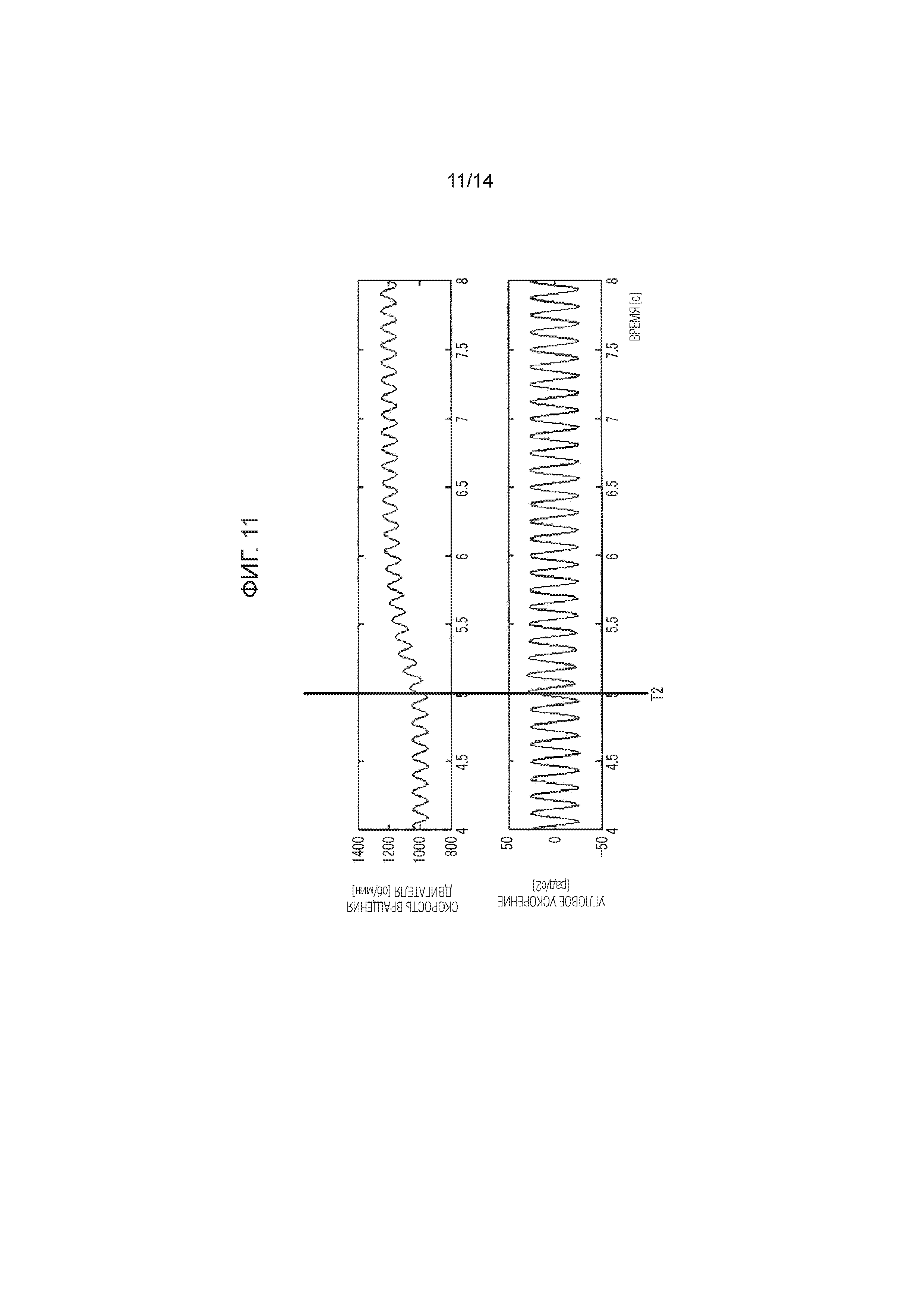
Технические преимущества, полученные в результате работы устройства управления для гибридного транспортного средства в соответствии со вторым вариантом осуществления, будут описаны ниже более подробно со ссылкой на фиг. 11. Фиг.11 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и углового ускорения.
[0050] В примере, показанном на фиг. 11, целевая скорость вращения двигателя при управлении скоростью вращения двигателя изменяется с 1000 об/мин до 1200 об/мин в момент времени Т2. В то же время сигнал, который был подвергнут процессу дифференцирования, указывающий угловое ускорение, практически не изменяется до и после времени T2. Это означает, что только компонент колебания скорости вращения электродвигателя-генератора MG в области, отделенной по частоте от колебания скорости вращения двигателя (то есть колебание с относительно низкой частотой) путем управления скоростью вращения двигателя, может быть извлечен путем выполнения процесса дифференцирования. То есть почти такое же преимущество, что и в процессе фильтрации в первом варианте осуществления, может быть получено путем процесса дифференцирования. В частности, компонент диапазона управления скоростью вращения двигателя относительно низких частот отсекается, и может быть извлечен только компонент колебания относительно высоких частот. Соответственно, при вычислении управляющего крутящего момента MG на основе сигнала, указывающего угловое ускорение, которое получают посредством процесса дифференцирования, можно выполнить управление скоростью вращения MG без влияния на скорость вращения двигателя (например, управление сопутствующим колебанием скорости вращения двигателя в области относительно низких частот для соответствия изменению целевой скорости вращения двигателя). Соответственно, можно предотвратить взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG и соответствующим образом уменьшить вибрацию гибридного транспортного средства.
[0051] Третий вариант осуществления
Ниже будет описано устройство управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления. Третий вариант осуществления отличается от первого и второго вариантов осуществления только некоторыми конфигурациями и операциями, и эти варианты осуществления равны друг другу в других частях. Соответственно, отличия от вышеупомянутых первого и второго вариантов осуществления будут описаны подробно ниже, и описание одних и те же частей не будет повторяться.
[0052] Конфигурация устройства
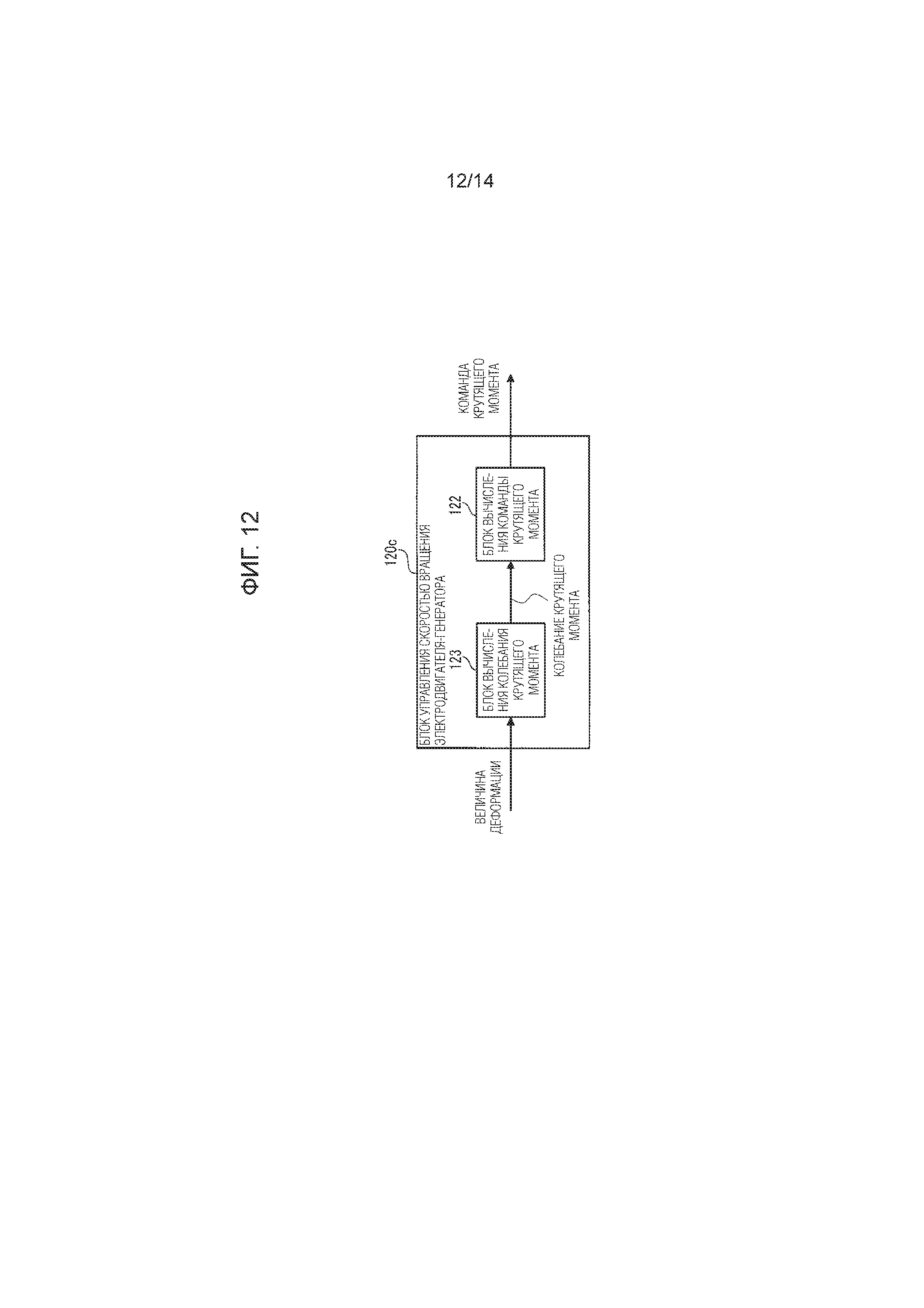
Конфигурация блока управления скоростью вращения MG в соответствии с третьим вариантом осуществления будет описана ниже со ссылкой на фиг. 12. Фиг. 12 представляет собой структурную схему, иллюстрирующую конфигурацию блока управления скоростью вращения MG в соответствии с третьим вариантом осуществления.
[0053] Как показано на фиг. 12, блок 120c управления скоростью вращения MG в соответствии с третьим вариантом осуществления включает в себя блок 124 вычисления колебания крутящего момента и блок 122 вычисления команды крутящего момента в качестве реализованных в нем блоков обработки или аппаратного обеспечения. Блок 124 вычисления колебания крутящего момента вычисляет колебание крутящего момента (то есть колебание крутящего момента при кручении), соответствующее величине деформации, обусловленной кручением входного вала или демпфера (ни один из которых не показан), соединенного с двигателем 200. Блок 124 вычисления колебания крутящего момента выполнен с возможностью вывода сигнала, указывающего вычисленное колебание крутящего момента при кручении (в дальнейшем соответственно называемое «колебанием крутящего момента»), в блок 122 вычисления команды крутящего момента. Блок 122 вычисления команды крутящего момента выводит сигнал команды крутящего момента, указывающий крутящий момент, который должен быть выведен от электродвигателя-генератора MG, на основе колебания крутящего момента, соответствующего величине деформации.
[0054] Описание операций
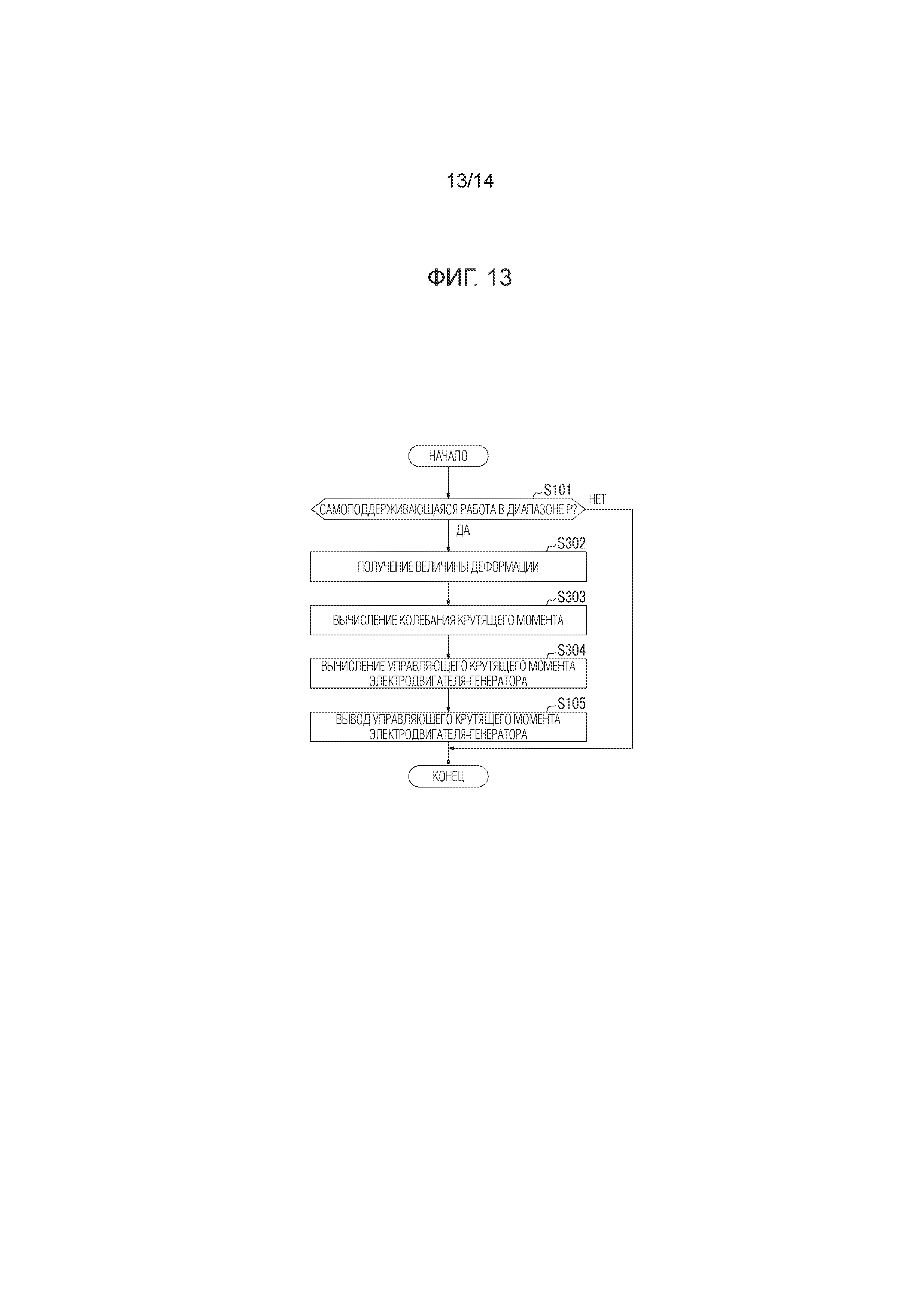
Операции (в частности, операция вывода крутящего момента управления вибрацией, которая выполняется блоком 120c управления скоростью вращения MG) устройства управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления подробно описаны ниже со ссылкой на фиг. 13. Фиг. 13 представляет собой блок-схему, иллюстрирующую последовательность операций устройства управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления.
[0055] На фиг. 13, когда устройство управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления работает, и определено, что двигатель 200 выполняет самоподдерживающуюся работу в диапазоне Р (ДА на этапе S101), блок 124 вычисления колебания крутящего момента получает величину деформации входного вала или демпфера (этап S302) и вычисляет колебание крутящего момента, соответствующее полученной величине деформации (этап S303). Сигнал, указывающий вычисленное колебание крутящего момента, выводится в блок 122 вычисления команды крутящего момента.
[0056] После этого блок 122 вычисления команды крутящего момента вычисляет управляющий крутящий момент MG, включающий в себя крутящий момент управления вибрацией, на основе сигнала, указывающего колебание крутящего момента (этап S304). То есть вычисляется крутящий момент для побуждения приближения скорости вращения MG к целевой скорости вращения MG. Затем блок 122 вычисления команды крутящего момента выводит вычисленный управляющий крутящий момент MG на электродвигатель-генератор MG (этап S105). Соответственно, крутящий момент, включающий в себя крутящий момент управления вибрацией, выводится от электродвигателя-генератора MG.
[0057] Преимущества варианта осуществления
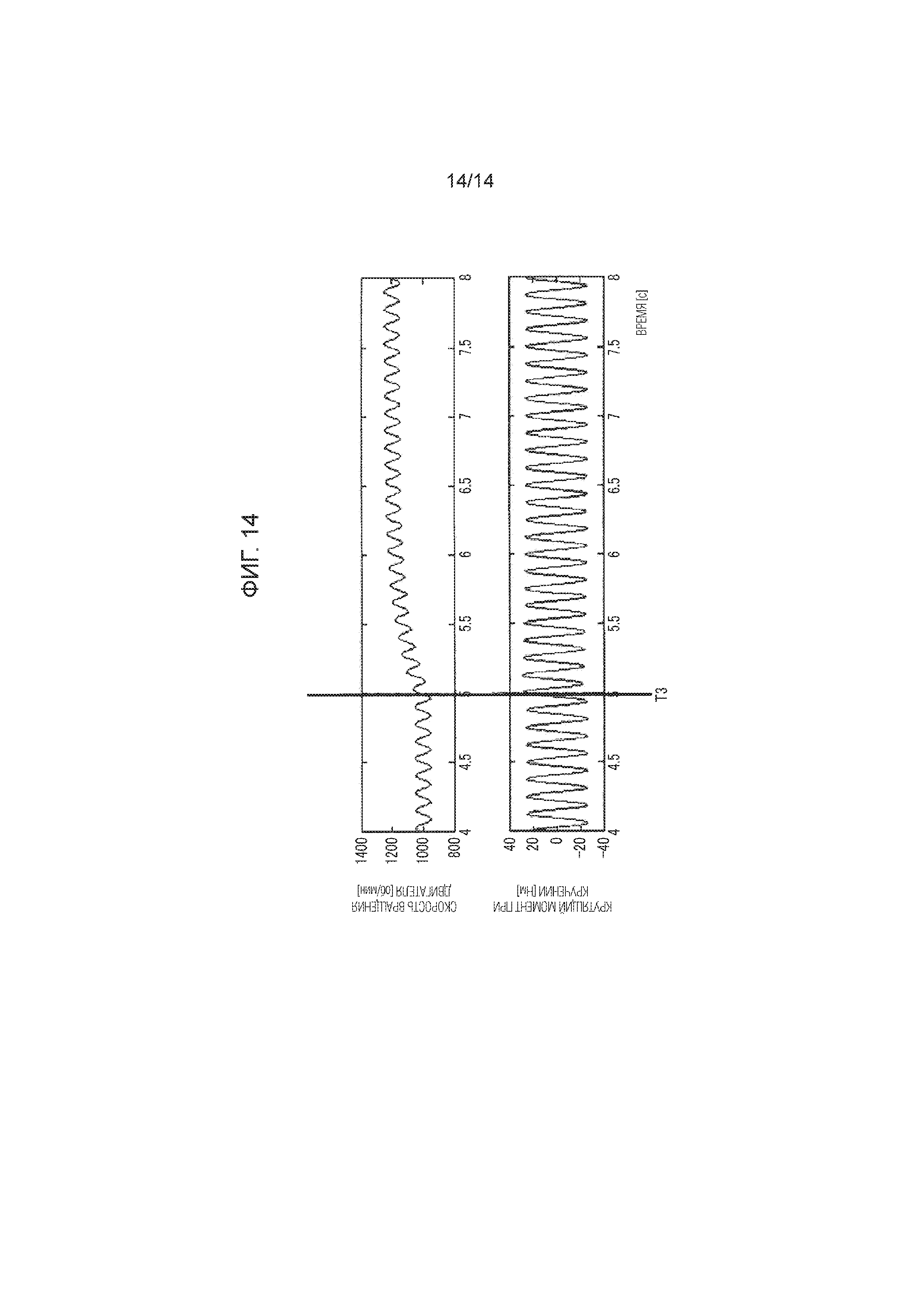
Технические преимущества, полученные в результате операций устройства управления для гибридного транспортного средства в соответствии с третьим вариантом осуществления, будут описаны подробно ниже со ссылкой на фиг. 14. Фиг. 14 представляет собой временную диаграмму, иллюстрирующую колебание скорости вращения двигателя и крутящего момента при кручении.
[0058] В примере, показанном на фиг. 14, целевая скорость вращения двигателя при управлении скоростью вращения двигателя изменяется с 1000 об/мин до 1200 об/мин в момент времени Т3. В то же время сигнал, указывающий колебание крутящего момента, соответствующее величине деформации, практически не изменяется до и после времени T3. Это означает, что только компонент колебания скорости вращения электродвигателя-генератора MG в области, отделенной по частоте от колебания скорости вращения двигателя (то есть колебание с относительно низкой частотой) путем управления скоростью вращения двигателя, может быть извлечен путем вычисления колебания крутящего момента, соответствующего величине деформации. То есть почти такое же преимущество, как в процессе фильтрации в первом варианте осуществления и в процессе дифференцирования во втором варианте осуществления, может быть получено путем вычисления колебания крутящего момента, соответствующего крутящему моменту при кручении. В частности, компонент диапазона управления скоростью вращения двигателя относительно низких частот отсекается, и может быть извлечен только компонент колебания относительно высоких частот. Соответственно, при вычислении управляющего крутящего момента MG на основе колебания крутящего момента при кручении, можно выполнять управление скоростью вращения MG без влияния на управление скоростью вращения двигателя (например, управление сопровождающим колебанием скорости вращения двигателя в области относительно низких частот для соответствия изменению целевой скорости вращения двигателя). Соответственно, можно предотвратить взаимное влияние между управлением скоростью вращения двигателя и управлением скоростью вращения MG и соответствующим образом уменьшить вибрацию гибридного транспортного средства.
[0059] Изобретение не ограничивается вышеупомянутыми вариантами осуществления и может быть соответствующим образом модифицировано без отклонения от сущности или замысла изобретения, который может быть понятен из приложенной формулы изобретения и всего описания. Устройство управления для гибридного транспортного средства с такими модификациями также включено в технический объем изобретения.
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Демпферное устройство для гашения крутильных колебаний
Гидродинамическая муфта
Устройство для снижения крутильных колебаний
Демпфер крутильных колебаний

