Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ
Вид РИД
Изобретение
Настоящее изобретение касается способа для измерения расстояния между вершинами лопаток удерживаемых на роторе рабочих лопаток и кольцеобразно окружающей вершины рабочих лопаток оболочкой при вращающемся роторе. Кроме того, настоящее изобретение касается устройства измерения расстояния, которое пригодно, в частности, для осуществления такого способа измерения.
Для обеспечения надежной эксплуатации турбины является важным устанавливать определенное расстояние, соответственно, определенную величину зазора между вершинами рабочих лопаток турбины и окружающей вершины лопаток оболочкой, которая формируется, например, посредством обоймы направляющих лопаток турбины. Такая установка осуществляется на уже смонтированной турбине перед первым вводом в эксплуатацию, а также перед и после осуществления технического обслуживания. На первом этапе регистрируется фактическое расстояние между вершинами лопаток и обоймами рабочих лопаток при вращающемся роторе. Для этого, например, используется способ измерения, при котором металлический штифт вводится через предусмотренное в оболочке радиальное сквозное отверстие, до ощущения монтажником удара вершин рабочих лопаток о металлический штифт. В таком случае, через глубину погружения металлического штифта может делаться вывод об имеющемся фактическом расстоянии между вершинами лопаток и оболочкой. Основываясь на зарегистрированном фактическом расстоянии, на следующем этапе производится юстировка относительной положения упомянутых деталей конструкции. Однако, проблема такого измерения расстояния состоит в том, что оно может сопровождаться повреждением турбины. Если металлический штифт вставляется слишком глубоко в сквозное отверстие оболочки, то он может срезаться вращающимися рабочими лопатками и падать в машину. Это влечет за собой то, что у уже окончательно смонтированной турбины опять должны демонтироваться слишком большие части, чтобы удалить пропавшие части из турбины, что сопровождается очень высокими затратами.
Исходя из этого уровня техники, задачей настоящего изобретения является создание способа для измерения расстояния между вершинами удерживаемых на роторе рабочих лопаток и кольцеобразно окружающей вершины лопаток оболочкой при вращающемся роторе, который осуществляется просто и экономично и не таит в себе опасности повреждений. Далее, задачей настоящего изобретения является создание устройства измерения, которое пригодно, в частности, для осуществления такого способа измерения.
Для решения этой задачи настоящее изобретение создает способ указанного в начале типа, который отличается тем, что расстояние измеряется при использовании, по меньшей мере, одного устройства измерения расстояния, которое имеет бесконтактно измеряющий датчик расстояния. Благодаря тому факту, что датчик расстояния работает бесконтактно, он не может повреждаться вершинами вращающихся во время измерения рабочих лопаток, вследствие чего предотвращаются трудоемкие и дорогие повторные работы (доводки) описанного в начале типа.
Предпочтительно, устройство измерения расстояния имеет конфокально-хроматический датчик расстояния. Использование конфокально-хроматического датчика расстояния является преимуществом в том смысле, что он предоставляет очень точные результаты измерения.
Согласно одному варианту осуществления соответствующего изобретению способа устройство измерения расстояния для осуществления измерения расстояния вставляется в проходящее радиально через оболочку, доступное снаружи сквозное отверстие. Соответственно, устройство измерения расстояния может простым образом монтироваться и демонтироваться.
Предпочтительно, измерение расстояния осуществляется на нескольких окружных позициях, которые, в частности, равномерно дистанцированы друг от друга. Таким образом, гарантируется надлежащая регистрация относительного фактического положения ротора и оболочки, что, в свою очередь, позволяет надлежащую установку относительного положения.
Устройство измерения расстояния и сквозное(ые) отверстие(ия) предпочтительно выполнены таким образом, что гарантируется, что оболочка в соответствующем назначению положении относительно установленного в сквозном отверстии устройства измерения расстояния выступает радиально внутрь. Так, например, сквозное(ые) отверстие(ия), а также внешний контур устройства измерения могут быть снабжены соответствующими уступами, которые предотвращают то, что устройство измерения расстояния выступает радиально внутрь относительно оболочки. Таким образом, контакт устройства измерения расстояния с вершинами вращающихся рабочих лопаток во время осуществления измерения может надежно исключаться.
Далее, для решения указанной в начале задачи настоящее изобретение создает устройство для измерения расстояния, которое подходит, в частности, для осуществления соответствующего изобретению способа, содержащее трубчатый корпус, бесконтактно измеряющий датчик расстояния, который установлен с возможностью перемещения в корпусе аксиально между рабочим положением, в котором вершина датчика выступает наружу из устройства для измерения расстояния, и убранным положением, в котором вершина датчика расположена внутри устройства измерения расстояния, и устройство фиксации, которое выполнено таким образом, что датчик расстояния выполнен с возможностью фиксации в своем рабочем положении. Благодаря подвижному расположению датчика расстояния между рабочим положением и убранным положением датчик расстояния при необходимости может в любое время переводиться в убранное положение для того, чтобы защитить его от внешних повреждений во время транспортировки или во время установки в предназначенное для него сквозное отверстие.
Предпочтительно, датчик расстояния является конфокально-хроматическим датчиком расстояния или акустическим датчиком расстояния.
Согласно одному варианту осуществления настоящего изобретения предусмотрена, по меньшей мере, одна пружина, которая расположена таким образом, что ее сила натяжения противодействует движению датчика расстояния из убранного положения в рабочее положение. Другими словами, датчик расстояния посредством пружины прижимается в убранное положение, вследствие чего обеспечено надлежащее позиционирование датчика расстояния в отдельных положениях.
Согласно одному варианту настоящего изобретения, датчик расстояния расположен на цилиндре, установленным с возможностью скользящего перемещения в корпусе.
Предпочтительно, датчик расстояния выполнен стержнеобразным и установлен в предусмотренном на свободном конце цилиндра аксиальном глухом отверстии. Вследствие этого достигается простая конструкция.
Другие признаки и преимущества настоящего изобретения становятся понятными вследствие нижеследующего описания устройства измерения расстояния согласно одному варианту осуществления настоящего изобретения со ссылками на приложенные чертежи, на которых изображено:
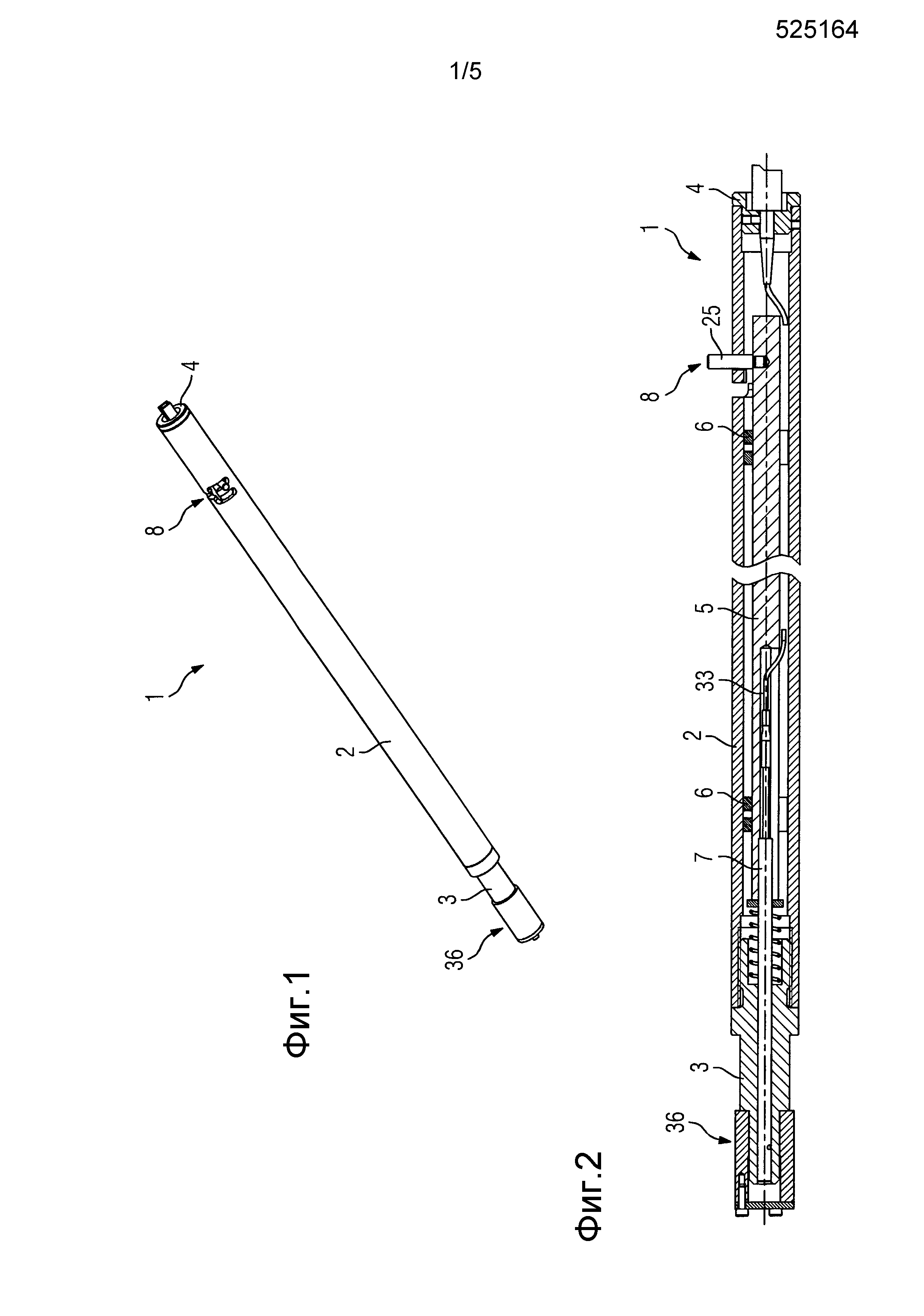
Фиг. 1 – перспективный вид устройства измерения расстояния согласно одному варианту осуществления настоящего изобретения;
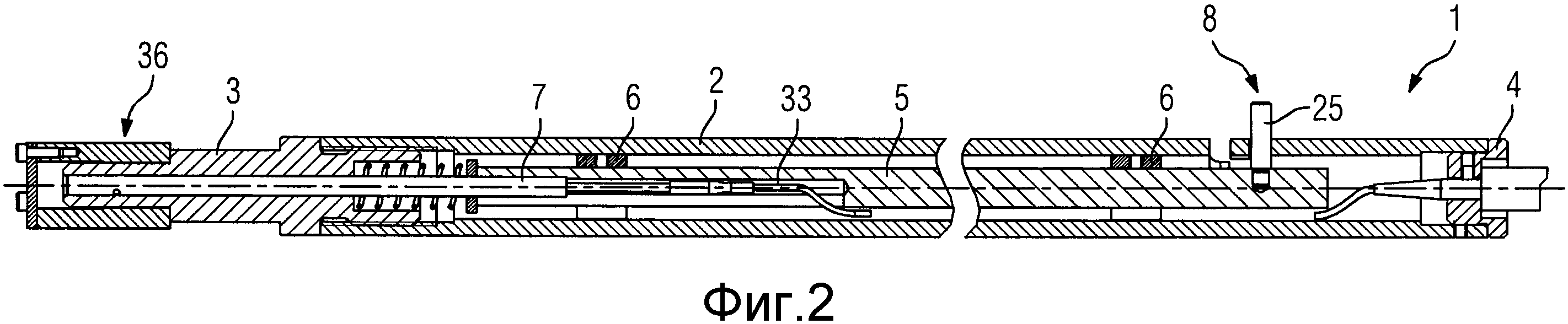
Фиг. 2 – увеличенный вид в сечении изображенного на Фиг. 1 устройства измерения расстояния;
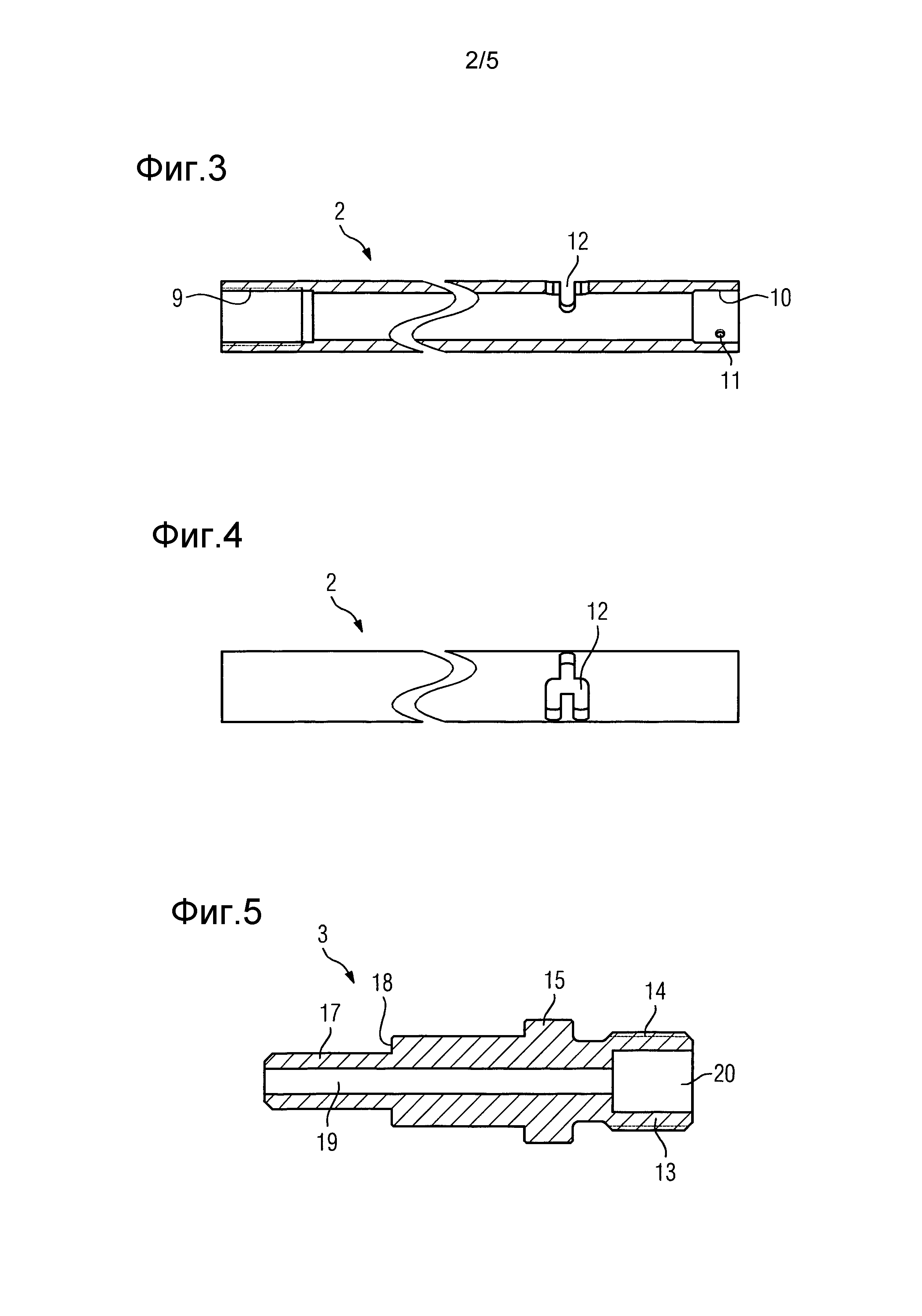
Фиг. 3 – вид в сечении корпуса изображенного на Фиг. 1 и 2 устройства измерения расстояния;
Фиг. 4 – вид сверху показанного на Фиг. 3 корпуса;
Фиг. 5 – вид в сечении втулки изображенного на Фиг. 1 и 2 устройства измерения расстояния;
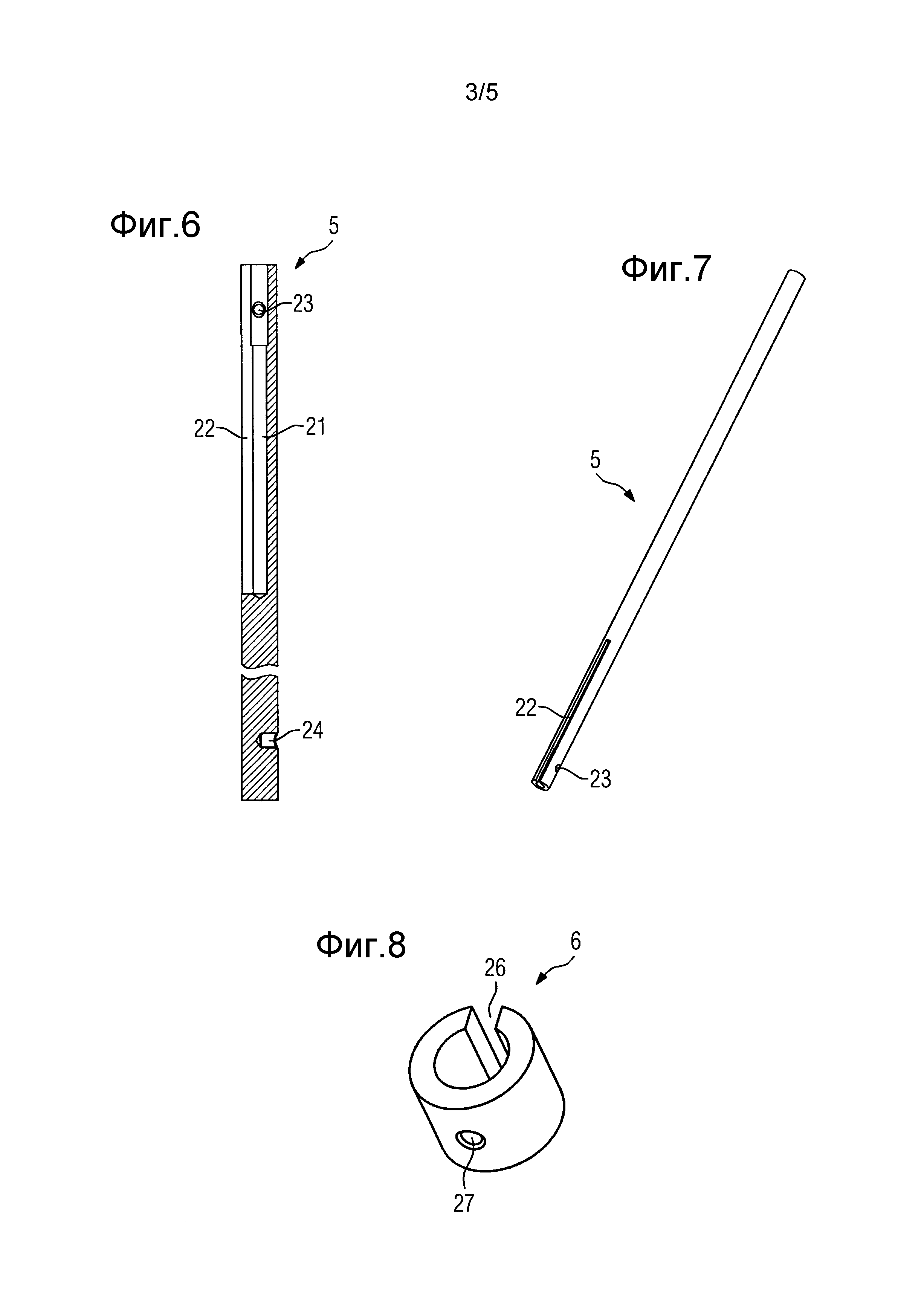
Фиг. 6 - вид в сечении цилиндра изображенного на Фиг. 1 и 2 устройства измерения расстояния;
Фиг. 7 – перспективный вид показанного на Фиг. 6 цилиндра;
Фиг. 8 – перспективный вид скользящей втулки изображенного на Фиг. 1 и 2 устройства измерения расстояния;
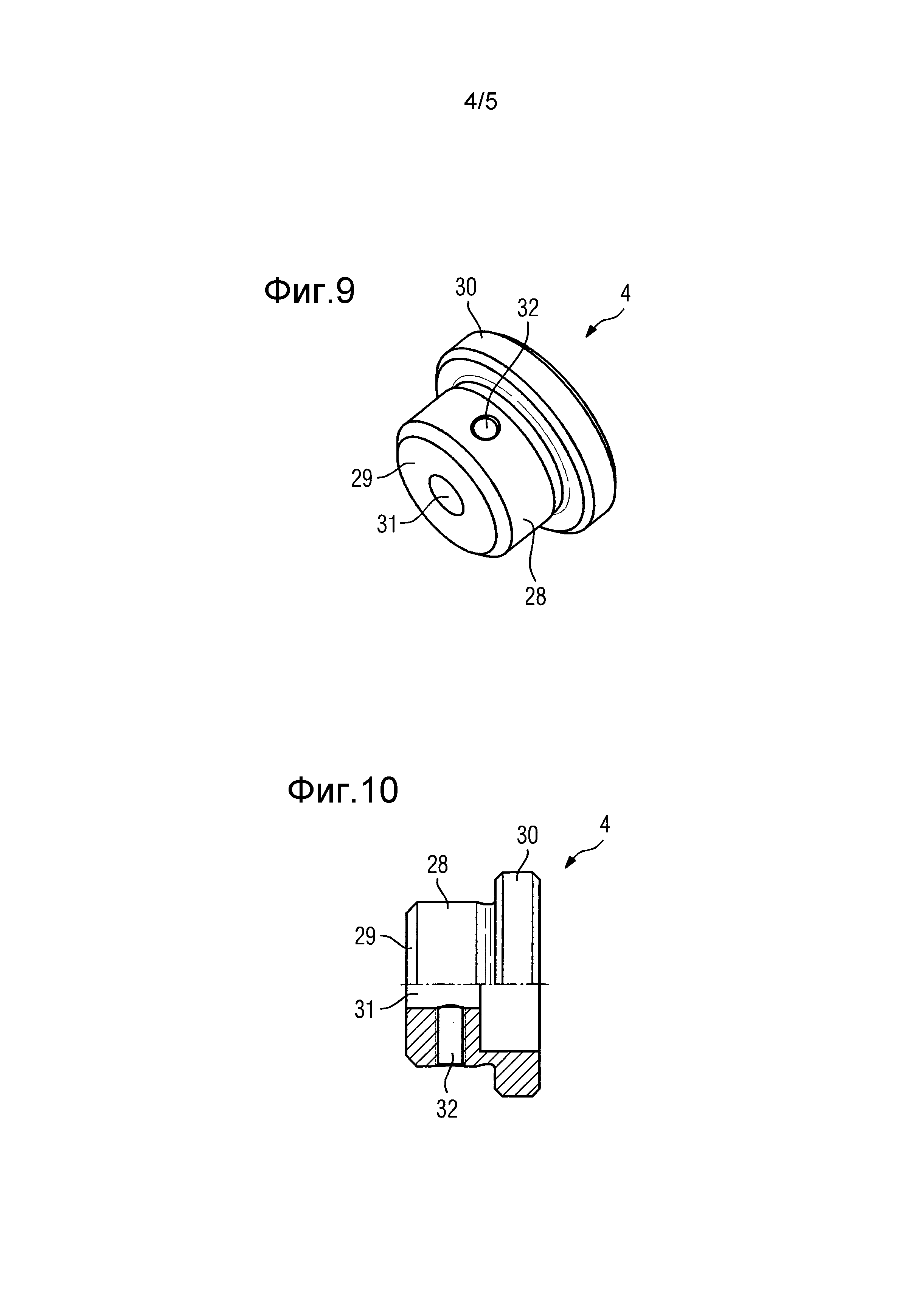
Фиг. 9 – перспективный вид крышки изображенного на Фиг. 1 и 2 устройства измерения расстояния;
Фиг. 10 – частичный вид в разрезе показанной на Фиг. 9 крышки;
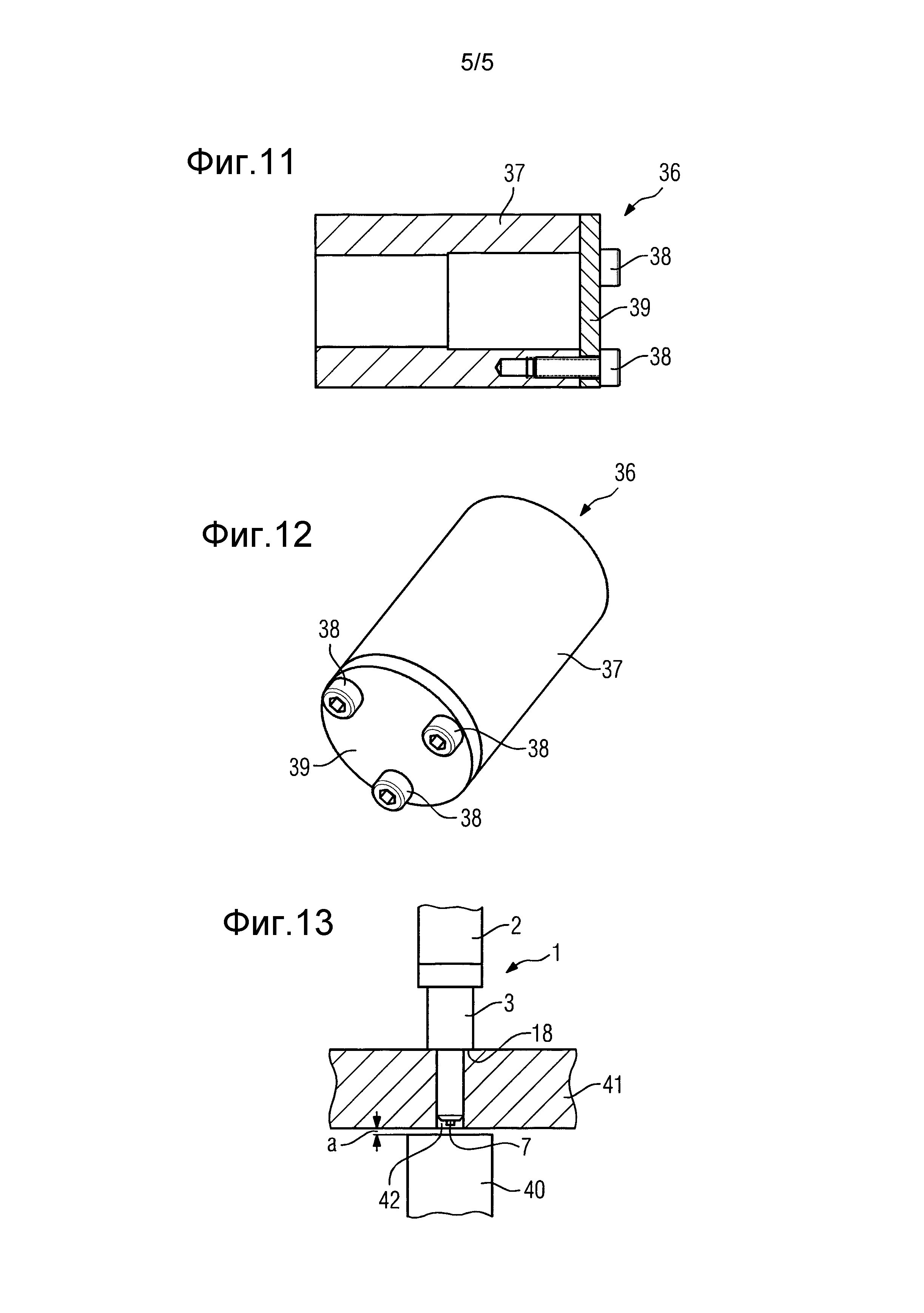
Фиг. 11 – вид в сечении калибровочного устройства изображенного на Фиг. 1 и 2 устройства измерения расстояния;
Фиг. 12 – перспективный вид показанного на Фиг. 11 устройства измерения расстояния и
Фиг. 13 – вид, который показывает изображенное на Фиг. 1 и 2 устройство измерения расстояния в расположенном соответственно назначению положении.
Фигуры показывают бесконтактно измеряющее устройство 1 измерения расстояния согласно одному варианту осуществления настоящего изобретения, соответственно, его компоненты. Устройство 1 измерения расстояния включает в себя в качестве основных компонентов: трубчатый корпус 2, закрывающую первый свободный конец корпуса 2 втулку 3, закрывающую второй свободный конец корпуса 2 крышку 4, установленный в корпусе 2 и выполненный с возможностью аксиального перемещения цилиндр 5, который подпирается скользящими втулками 6 относительно корпуса 2, закрепленный на цилиндре 5 датчик 7 расстояния, который проходит через втулку 3, и устройство 8 фиксации, с помощью которого цилиндр 5 может перемещаться в аксиальном направлении и фиксироваться в различных положениях. В данном случае, в случае датчика 7 расстояния речь идет о конфокально-хроматическом датчике расстояния. Однако альтернативно также может использоваться акустический датчик расстояния или другой бесконтактно измеряющий датчик расстояния.
Корпус 2 для фиксации втулки 3 на своем первом свободном конце снабжен внутренней резьбой 9. На втором свободном конце корпуса 2 выполнен крепежный участок 10 для крепления крышки 4. В области крепежного участка 10 расположено резьбовое отверстие 11, которое проходит радиально через стенку корпуса 2 и служит для приема здесь не изображенного потайного винта. Далее, корпус 2 снабжен Y-образным проемом 12, который формирует часть устройства 8 фиксации.
Втулка 3 выполнена, ссылаясь на Фиг. 5, по существу вращательно-симметричной. На своем первом свободном конце она включает в себя крепежный участок 13, который снабжен выполненной ответно внутренней резьбе 9 корпуса 2 наружной резьбой 14. После крепежного участка 13 наружный диаметр втулки 3 сужается и затем переходит в выступающий радиально снаружи и служащий упором выступ 15. К выступу 15 примыкают промежуточный участок 16 с первым диаметром и конечный участок 17 со вторым диаметром, которые ступенью 18 отделены друг от друга, причем первый диаметр больше, чем второй диаметр. Через втулку 3 проходит сквозное отверстие 19, которое служит для приема свободного конца датчика 7 расстояния. Далее, в области крепежного участка 13 предусмотрена принимающая пружину полость 20 в форме проходящего в аксиальном направлении глухого отверстия.
Цилиндр 5, который в деталях изображен на Фиг. 6 и 7, изготовлен из цельного материала и снабжен на своем обращенном к втулке 3 свободном конце глухим отверстием 21, которое служит для приема датчика 7 расстояния. По длине глухого отверстия 21 в аксиальном направлении проходит паз 22. Далее, в передней области глухого отверстия 21 образовано резьбовое отверстие 23, которое проходит в радиальном направлении и служит для приема потайного винта (установочного винта). Другое, радиально проходящее резьбовое отверстие 24 образовано на другом свободном конце цилиндра 5, которое служит для закрепления резьбового штифта 25, который формирует часть устройства 8 фиксации.
Скользящие втулки 6 по существу выполнены кольцеобразными, причем соответствующий внутренний диаметр скользящих втулок 6 по существу соответствует наружному диаметру цилиндра 5. Скользящие втулки 6 снабжены аксиально проходящим, прерывающим кольцевую форму пазом 26. Далее, на каждой скользящей втулке 6 в радиальном направлении выполнено резьбовое отверстие 27, которое в свою очередь служит для приема потайного винта.
Фиг. 9 и 10 показывают крышку 4, которая также выполнена по существу вращательно-симметричной. Крышка 4 включает в себя выполненный ответно крепежному участку 10 корпуса 2 и вставляемый в него посредством посадки с зазором крепежный участок 29 и примыкающий к крепежному участку 29, радиально выступающий выступ 30. Крышка 4 снабжена по центру сквозным отверстием 31. Кроме того, в области крепежного участка 29 выполнено резьбовое отверстие 32, которое проходит радиально до сквозного отверстия 31 и служит для приема потайного винта.
Для монтажа устройства 1 измерения расстояния на первом этапе скользящие втулки 6 надвигаются на наружный диаметр цилиндра 5, позиционируются дистанцированно друг от друга и посредством потайных винтов (установочных винтов) устанавливаются на цилиндре 5. На следующем этапе в глухое отверстие 21 цилиндра 5 вдвигается снабженный кабелем 33 конец датчика 7 расстояния и кабель 33 направляется через паз 22 цилиндра 5. После этого, подкладная шайба 34, а также пружина 35 надвигаются на свободный конец датчика 7 расстояния. На следующем этапе, цилиндр 5 вместе с датчиком 7 расстояния, подкладной шайбой 34 и пружиной 35 вдвигается в корпус 2 до тех пор, пока резьбовое отверстие 24 цилиндра 5 не совместиться с проемом 12 корпуса 2. После этого, резьбовой штифт 25 направляется через проем 12 корпуса 2 и завинчивается в резьбовое отверстие 24 цилиндра 5. На следующем этапе, свободный конец датчика 7 расстояния вводится в сквозное отверстие 19 втулки 3. После этого, втулка 3 свинчивается с корпусом 2 до тех пор, пока выступ 15 втулки 3 не упрется в корпус 2, причем пружина 35 устанавливается в принимающую пружину полость 20. Во время процесса свинчивания пружина 35 зажимается между втулкой 3 и подкладной шайбой 34. На следующем этапе крепежный участок 29 крышки 4, через сквозное отверстие 31 которой проведен кабель 33 датчика 7 расстояния и зафиксирован вставленным в резьбовое отверстие 32 потайным винтом, посредством посадки с зазором вставляется в крепежный участок 10 корпуса 2. После этого, крышка 4 фиксируется на корпусе 2 за счет того, что потайной винт вставляется через резьбовое отверстие 11 корпуса 2.
В смонтированном состоянии цилиндр с удерживаемым в нем датчиком 7 расстояния может аксиально перемещаться внутри корпуса 2 за счет того, что резьбовой штифт 25 устройства 8 фиксации приводится вручную. Точнее говоря, датчик 7 расстояния может перемещаться аксиально между рабочим положением, в котором вершина датчика 7 расстояния вступает из втулки 3, убранным положением, в котором вершина датчика 7 расстояния расположена внутри втулки 3, и промежуточным положением и фиксироваться в этих положениях.
Для калибровки устройства 1 измерения расстояния на концевой участок 17 втулки 3, как это изображено на Фиг. 1 и 2, может надвигаться с точной посадкой калибровочное устройство 36. Калибровочное устройство 36 включает в себя вращательно-симметричную гильзу 37, на которой с торца посредством винтов 38 закреплена крышка 39. Внутренний диаметр гильзы 37 выполнен двухступенчатым, причем внутренний диаметр на том свободном конце гильзы 37, на котором расположена крышка 39, незначительно больше, чем диаметр на другом свободном конце. Соответственно, посадка должна предусматриваться только на свободном конце гильзы 37.
Фиг. 13 показывает устройство 1 измерения расстояния в соответствующем назначению состоянии во время измерения расстояния (а) между вершинами удерживаемых на роторе рабочих лопаток 40 и кольцеобразно окружающей вершины рабочих лопаток оболочкой 41, которая в данном случае образуется посредством обоймы направляющих лопаток. Для осуществления такого измерения, втулка 3 устройства 1 измерения расстояния вставляется в проходящее радиально через оболочку 41, доступное снаружи сквозное отверстие 42, которое выполнено в области рабочих лопаток 40, до тех пор, пока ступень 18 не упрется в оболочку 41. На следующем этапе датчик 7 расстояния посредством ручного приведения в действие устройства 8 фиксации переводиться в свое рабочее положение, так что вершина датчика 7 расстояния выступает наружу из устройства 1 измерения расстояния. При этом, длина концевого участка 17 устройства 1 измерения расстояния выбрана таким образом, что устройство 1 измерения расстояния, включая выступающую из него вершину датчика 7 расстояния, в соответствующем назначению состоянии не выступает радиально внутрь сквозь оболочку 41, так что вершина датчика 7 расстояния защищена от контакта с рабочими лопатками 40. На следующем этапе, при использовании конфокально-хроматического датчика 7 расстояния при вращающемся роторе определяется расстояние (а). Предпочтительно, предусмотрены распределенные по периметру оболочки 41 несколько сквозных отверстий 24, так что измерение расстояния (а) может повторяться на различных окружных позициях, вследствие чего повышается точность регистрации относительного положения между рабочими лопатками 40 и оболочкой 41.
Существенное преимущество изображенного на фигурах устройства 1 измерения расстояния состоит в том, что оно благодаря использованию конфокально-хроматического датчика 7 расстояния поставляет очень точные результаты измерения. Кроме того, датчик 7 расстояния работает бесконтактно и защищен от контакта с рабочими лопатками 40 во время проведения измерения. Благодаря подвижному расположению датчика 7 расстояния между рабочим положением и убранным положением, датчик 7 расстояния при необходимости всегда может переводиться в убранное положение для того, чтобы защитить его от внешних повреждений во время транспортировки или также во время установки в предназначенное для него сквозное отверстие 24.
Несмотря на то, что изобретение подробно в деталях было иллюстрировано и описано посредством предпочтительного примера осуществления, изобретение не ограничено раскрытыми примерами и из них специалистом могут выводиться другие вариации без выхода за объем защиты изобретения.
Способ определения диаметра оснащенного рабочими лопатками ротора лопаточной машины
Газонапорный выключатель нагрузки
Инвертор для высоких напряжений
Устройство для выделения ферромагнитных частиц из суспензии (варианты)
Способ и устройство для оценки повреждения подшипников качения, в частности, в электрических машинах, питаемых через преобразователь частоты переменного тока
Система датчиков для измерения крутящего момента и вал с системой датчиков для измерения крутящего момента
Способ функционирования мельницы
Электрическая машина
Вагонный замедлитель, снабженный по меньшей мере одним вертикально подвижным тормозным элементом, а также способ определения его текущего положения
Смесительное устройство для смешивания агломерирующего порошка в суспензию
Машина для чистки поверхностей
Способ генерирования секретного криптографического ключа в сети
Опора для ротора для балансировочной машины

