Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к разделу физика и может найти применение при определении абсолютных координат подвижного объекта относительно нулевой координаты для нужд пеленгации, навигации, измерения расстояния или скорости для определения местоположения или обнаружения объектов.
Известен способ определения местоположения объекта (книга Расчет вероятностного критерия достоверности локализации диполя в обратной задаче магнитостатики / Гуменюк - Сычевский В.И., Недайвода И.В., Примин М.А. - Киев, 1990. 17 с. (Препр. / АН УССР. Ин-т кибернетики им. В.М. Глушкова)), заключающийся в том, что при пространственном анализе вектора магнитной индукции и его производных решается обратная задача магнитостатики, когда по известному в некоторой точке пространства магнитному полю определяют местоположение дипольного источника поля относительно указанной точки и дипольный или квадратурный момент источника. При этом если источник поля аппроксимируется магнитным диполем с моментом М, то решение обратной задачи получают при помощи итерационных, аналитических или аппаратурно-аналитических методов. Например, при измеренных в одной точке пространства первых и вторых производных вектора магнитной индукции, решение задачи получают аналитически и реализуют алгоритм обработки информации в реальном масштабе времени. Способ выполняет возложенные на него функции, однако обладает низкой устойчивостью поскольку, как отмечают сами авторы, небольшие ошибки в измеренных параметрах поля приводят к значительным погрешностям в определении местоположения и вектора магнитного момента диполя.
Известен способ позиционирования подвижного объекта в фиксированной системе координат (патент РФ №2413957 МПК G01S 3/00 (2006.01), год опубликования 2011), заключающийся в том, что генерируют последовательно во времени двухполярные импульсы магнитных полей разной пространственной ориентации, измеряют ортогональные компоненты магнитного поля на вершине импульса каждой полярности каждого двухполярного импульса магнитного поля каждой пространственной ориентации на подвижном объекте; компенсируют влияние магнитного поля Земли путем попарного вычитания компонент магнитных полей, измеренных во время действия разных полярностей каждого двухполярного импульса магнитного поля, сохраняют скомпенсированные измеренные компоненты магнитных полей, вычисляют текущие координаты подвижного приемника после каждого переключения ориентации магнитного поля, используя текущие скомпенсированные компоненты магнитного поля, а также сохраненные скомпенсированные компоненты магнитного поля, полученные во время действия предыдущих двухполярных импульсов магнитного поля другой ориентации по отношению к текущему двухполярному импульсу, составляющих повторяющийся период генерирования импульсного магнитного поля. Способ решает поставленную задачу, однако требует для своей реализации специальной конструкции датчиков с минимальными размерами, а также уменьшения влияния импульсного характера нагрузки на блок питания.
В качестве прототипа выбран способ позиционирования пары излучатель - приемник для определения их взаимного положения (Желамский М.В. Особенности измерения локального магнитного поля позиционирования на малых дальностях. Журнал Измерительная техника №9, 2014 с. 39-43). Способ заключается в том, что создают независимые магнитные поля, которые раздельно регистрируют подвижным приемником с несколькими датчиками, при этом для определения шести координат (три линейных и три угла Эйлера) излучатель содержит три независимых обмотки, а подвижный приемник - до трех взаимно ортогональных индукционных датчика, причем полученный с датчиков набор данных используется для пересчета параметров излучателя поля в координаты подвижного объекта путем периодического решения систем нелинейных уравнений с учетом математической модели магнитного поля излучателя. Определение координат объекта основано на том, что известен закон распределения магнитного поля в пространстве. При этом решается система уравнений, как минимум, с шестью неизвестными. Например, три координаты объекта, три вектора ориентации объекта в пространстве. Как правило, добавляются еще три неизвестных, связанных с неточностью изготовления датчиков. В виду изменения величины магнитного поля на несколько порядков требуются точные многократные измерения для выделения полезного сигнала над уровнем естественных шумов. Трудность представления решения в аналитическом виде, погрешность измерения физических величин в широком динамическом диапазоне, необходимость фильтрации шумов приводят к итерационным методам решения вычисления координат. Это непростая задача, учитывая количество неизвестных и ограниченное время для нахождения координат подвижных объектов.
Способ - прототип выполняет поставленные для него задачи, но обладает двумя существенными недостатками:
1. Погрешность производимых измерений существенным образом зависит от точности математической модели излучателей и приемников магнитного поля, участвующих в вычислении окончательного результата. Например, оценка погрешностей при решении обратной задачи магнитостатики дана в литературе (Расчет вероятностного критерия достоверности локализации диполя в обратной задаче магнитостатики / Гумелюк - Сычевский В.И., Недайвода И.В., Примин М.А., - Киев, 1990. - 17 С - (Препр. / АН УССР. Институт кибернетики им. Глушкова)). Излучатель там представлен моделью магнитного диполя. Оценка указывает на достаточно высокую допустимую погрешность ±10% с вероятностью 0.9, что неприемлемо в некоторых практических приложениях.
Кроме этого проведение вычислительных операций при определении местоположения приемника затягивается, поскольку расчет параметров сложной математической модели элементов системы должен производиться регулярно.
2. Внесение магнитомягких изделий (железа) в зону измерения искажает магнитное поле. Даже небольшое отклонение магнитного поля от модели представляет большую проблему. В этом случае в литературе (Желамский М.В. Электромагнитное позиционирование подвижных объектов. М: Физматлит, 2013, стр. 201 и стр. 204) рекомендуется картографирование магнитного поля.
Известна система для определения положения и ориентации объекта, перемещающегося в ограниченной области пространства (патент РФ №2241958 МПК G01C 21/00 (2000.01), G05D 1/00 (2000.01), год опубликования 2004), содержащая источник рабочего поля, выполненный с возможностью формирования в упомянутой области перемещения объекта неоднородного несимметричного постоянного магнитного поля, по меньшей мере шесть однокомпонентных дифференциальных датчиков магнитного поля для измерения текущих градиентов магнитного поля, размещенных в области перемещения объекта с обеспечением жесткой связи с объектом и исключением взаимного дублирования, устройство для приема сигналов датчиков и передачи этих сигналов на средства обработки данных, содержащие блок памяти для хранения координат датчиков, определенных в системе координат объекта, и расчетных градиентов магнитного поля, формируемого источником рабочего поля, и вычислительный блок для решения системы по меньшей мере шести алгебраических уравнений, включающей упомянутые координаты датчиков и составленной приравниванием измеренных значений градиентов к расчетным градиентам магнитного поля, с получением трех линейных и трех угловых координат объекта. Предложенное авторами техническое решение, требуя проведения сложных вычислительных операций в реальном масштабе времени, затягивает процесс определения координат объекта.
Известна система локальной навигации (Черноножкин В.А., Половко С.А. Система локальной навигации для наземных мобильных роботов. Научная электронная библиотека «КИБЕРЛЕНИНКА», https://cyberleninka.ru/article/v/sistema-lokalnoy-navigatsii-dlya-nazemnyh-mobilnyh-robotov). Система состоит из блока чувствительных элементов (трех гироскопов и трех акселерометров), блока программной обработки информации (в него входят основной модуль, модуль обработки входящих пакетов, модуль определения навигационной информации, модуль сохранения/считывания логов), пульта управления. Система предусматривает соединение блока программной обработки информации с блоком чувствительных элементов, и пультом управления. Недостатками системы являются сложность реализации, необходимость в применении чувствительных датчиков (гироскопов и акселерометров), а также необходимость начальной настройки и накопление ошибки определения навигационных параметров объекта со временем.
В качестве прототипа выбрано устройство для магнитного позиционирования (Желамский М.В. Первый отечественный магнитный трекер для целеуказания. Журнал Датчики и Системы №1, 2011 с. 9-15). Устройство, схема которого представлена на рис. 2 указанного литературного источника, состоит из генератора фиксированного магнитного поля, подвижного приемника, закрепленного на объекте, контроллера, интерфейса и вычислителя, при этом интерфейс соединен с подвижным приемником, а через контроллер и с генератором магнитного поля, причем вычислитель через интерфейс и контроллер подключен к выходу генератора магнитного поля и к выходу подвижного приемника. Устройство выполняет свои функции, но имеет недостаточную точность, что было показано при анализе работоспособности способа - прототипа. А именно:
1. Погрешность производимых измерений существенным образом зависит от точности математической модели излучателей и приемников магнитного поля, участвующих в вычислении окончательного результата. Например, оценка погрешностей при решении обратной задачи магнитостатики дана в литературе (Расчет вероятностного критерия достоверности локализации диполя в обратной задаче магнитостатики / Гумелюк - Сычевский В.И., Недайвода И.В., Примин М.А., - Киев, 1990. - 17 С - (Препр. / АН УССР. Институт кибернетики им. Глушкова)). Излучатель там представлен моделью магнитного диполя. Оценка указывает на достаточно высокую допустимую погрешность ±10% с вероятностью 0.9, что неприемлемо в некоторых практических приложениях. Кроме этого проведение вычислительных операций при определении местоположения приемника затягивается, поскольку расчет параметров сложной математической модели элементов системы должен производиться регулярно.
2. Внесение магнитомягких изделий (железа) в зону измерения искажает магнитное поле. Даже небольшое отклонение магнитного поля от модели представляет большую проблему. В этом случае в литературе (Желамский М.В. Электромагнитное позиционирование подвижных объектов. М: Физматлит, 2013, стр. 201 и стр. 204) рекомендуется картографирование магнитного поля.
Основными операциями, используемыми вышеперечисленными известными способами и элементами всех устройств, их реализующих, являются излучение (излучатель для устройств) и измерение (приемник излучения для устройства). В нашем случае излучение связано с созданием магнитного поля, измерение - с оценкой показателей магнитного поля в точке измерения.
Итак, выполняя возложенные на него задачи, способ и устройство для его осуществления обладают низкой точностью и малым быстродействием, а так же не проявляет робастных свойств при внесении магнитомягких материалов в зону измерения.
Технический результат предлагаемого изобретения заключается в повышении точности измерения и увеличении быстродействия.
Такой результат достигается за счет того, что способ определения местоположения объекта, заключающийся в том, что измерение координат его расположения осуществляют путем создания магнитного поля излучателем, регистрации его приемником с дальнейшим вычислением координат расположения приемника, дополняют тем, что излучатель изготавливают с использованием трех рамок, причем три рамки излучателя х, у и z располагают во взаимоперпендикулярных плоскостях, приемник выполнен с использованием трех рамок х, у и z, расположенных во взаимоперпендикулярных плоскостях, перед измерением проводят калибровку, необходимую для определения констант, используемых при расчете координат приемника, для чего размещают приемник в точке с координатами (х, 0, 0), создают магнитное поле, подключая генератор синусоидального сигнала к рамке излучателя х, измеряют магнитную индукцию рамкой приемника х, по этому параметру рассчитывают константу Кх и запоминают ее, перемещают приемник в точку с координатами (0, у, 0), создают магнитное поле, подключая генератор синусоидального сигнала к рамке излучателя у, измеряют магнитную индукцию рамкой приемника у, по этому параметру рассчитывают константу Ку и запоминают ее, располагают приемник в точку с координатами (0, 0, z), создают магнитное поле, подключая генератор синусоидального сигнала к рамке излучателя z, измеряют магнитную индукцию рамкой приемника z, по этому параметру рассчитывают константу Кz и запоминают ее, далее для определения координат выбранной точки устанавливают в нее приемник, излучателем формируют вращающееся магнитное поле, подключая два генератора синусоидальных сигналов, сдвинутых друг относительно друга на 90 электрических градусов, к двум из трех рамок излучателя х и у, рамкой приемника х измеряют магнитную индукцию в выбранной точке, определяют фазовый угол сдвига α синусоиды магнитной индукции в точке измерения относительно генерируемой излучателем и максимальное значение магнитной индукции Вх, запоминают величины угла α и максимального значения магнитной индукции Вх, излучателем формируют вращающееся магнитное поле, подключая два генератора синусоидальных сигналов, сдвинутых друг относительно друга на 90 электрических градусов, к двум из трех рамок излучателя у и z, рамкой приемника у измеряют магнитную индукцию в выбранной точке, определяют фазовый угол сдвига β синусоиды магнитной индукции в точке измерения относительно генерируемой излучателем и максимальное значение магнитной индукции By, запоминают величины угла β и максимального значения магнитной индукции By, излучателем формируют вращающееся магнитное поле, подключая два генератора синусоидальных сигналов, сдвинутых друг относительно друга на 90 электрических градусов, к двум из трех рамок излучателя z и х, рамкой приемника z измеряют магнитную индукцию в выбранной точке, определяют фазовый угол сдвига γ синусоиды магнитной индукции в точке измерения относительно генерируемой излучателем и максимальное значение магнитной индукции Bz, запоминают величины угла γ и максимального значения магнитной индукции Bz, а затем вычисляют текущие координаты положения приемника, используя сохраненные данные о константах Кх, Ку, Кz, углах α, β, γ и величинах максимальных значений магнитной индукции Вх, By и Bz.
Технический результат достигается тем, что в устройство определения местоположения объекта, содержащее излучатель и приемник, первый генератор, контроллер своим третьим выходом подключенный ко второму входу вычислителя, предназначенного для вычисления текущих координат местоположения приемника, введены первый усилитель тока, второй усилитель тока, третий усилитель тока, первый коммутатор, второй генератор, пульт управления, второй коммутатор, вычислитель констант, измеритель индукции Вх, измеритель индукции By, измеритель индукции Bz, первый синхронный фильтр, второй синхронный фильтр, третий синхронный фильтр, при этом излучатель выполнен в виде рамки излучателя х, рамки излучателя у и рамки излучателя z, ориентированных друг относительно друга во взаимоперпендикулярных плоскостях, приемник выполнен в виде рамки приемника х, рамки приемника у и рамки приемника z, ориентированных друг относительно друга во взаимоперпендикулярных плоскостях, рамка излучателя х подключена к выходу первого усилителя тока, рамка излучателя у подключена к выходу второго усилителя тока, рамка излучателя z подключена к выходу третьего усилителя тока, вход первого усилителя тока соединен с первым выходом первого коммутатора, вход второго усилителя тока соединен со вторым выходом первого коммутатора, вход третьего усилителя тока соединен с третьим выходом первого коммутатора, к первому информационному входу первого коммутатора подключен выход первого генератора, а ко второму информационному входу первого коммутатора подключен выход второго генератора, контроллер первым своим выходом соединен с управляющим входом первого коммутатора, пульт управления подключен ко входу контроллера, второй выход контроллера подключен к управляющему входу второго коммутатора, первый выход второго коммутатора через вычислитель констант соединен с первым входом вычислителя, третий вход вычислителя соединен со вторым выходом второго коммутатора, рамка приемника х через измеритель индукции Вх подключена к информационному входу первого синхронного фильтра, выход которого соединен с первым информационным входом второго коммутатора, рамка приемника у через измеритель индукции By подключена к информационному входу второго синхронного фильтра, выход которого соединен со вторым информационным входом второго коммутатора, рамка приемника z через измеритель индукции Bz подключена к информационному входу третьего синхронного фильтра, выход которого соединен с третьим информационным входом второго коммутатора, при этом выход первого генератора соединен с синхронизационными входами первого синхронного фильтра, второго синхронного фильтра и третьего синхронного фильтра, выход пульта управления подключен к управляющим входам первого синхронного фильтра, второго синхронного фильтра и третьего синхронного фильтра, причем первый и второй генераторы вырабатывают на своих выходах синусоидальные сигналы, сдвинутые друг относительно друга на 90 электрических градусов.
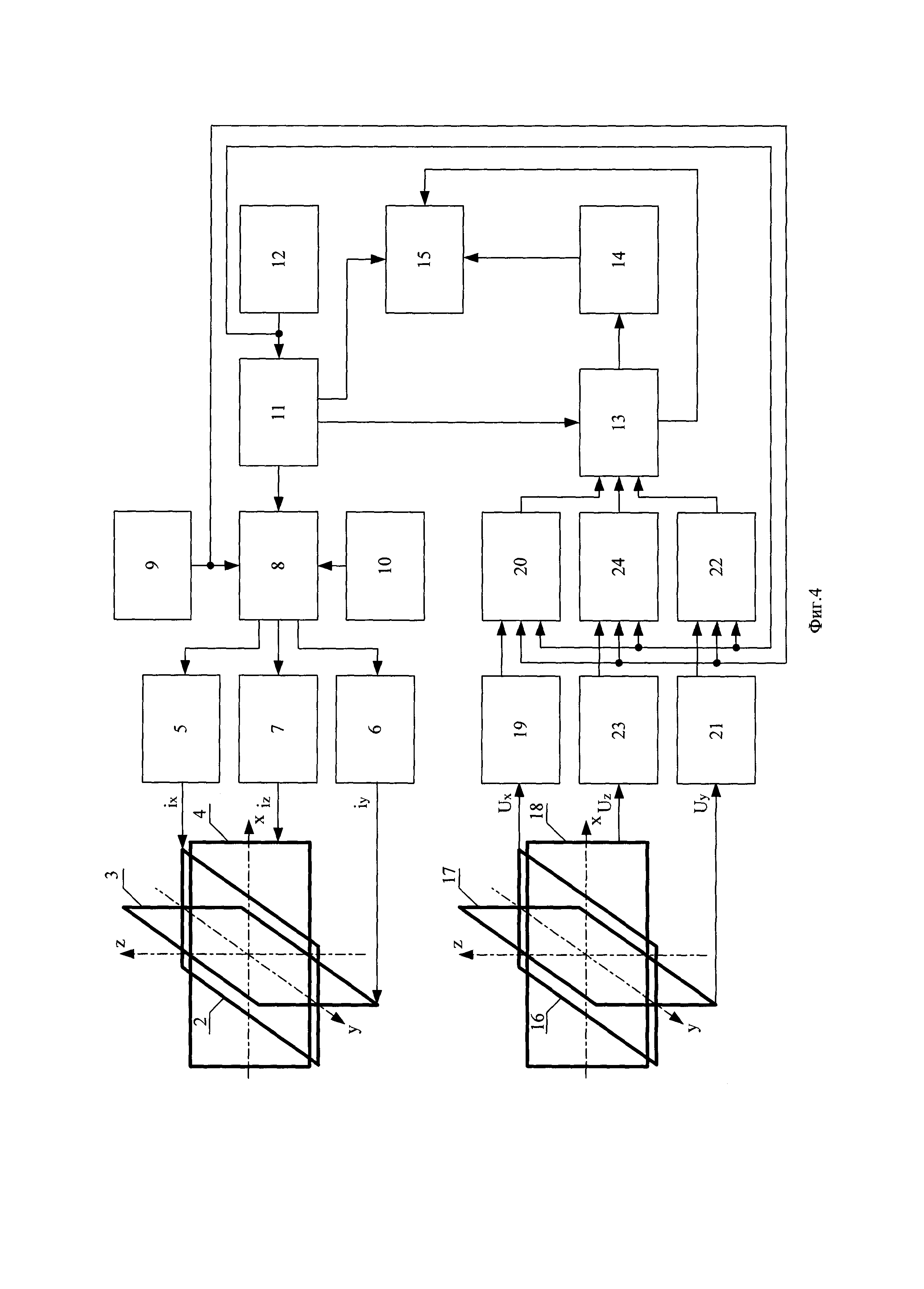
На фиг. 1 изображены временные диаграммы индукции магнитного поля, измеренные в различных точках, находящихся под разными углами к излучателю, выполненному в виде вращающегося магнита; на фиг. 2 изображены временные диаграммы индукции магнитного поля, измеренные в различных точках, находящихся под разными углами к излучателю, выполненному в виде двух рамок с электрическим током, когда вращение магнитного поля производится электрически; на фиг. 3 приведена векторная диаграмма, иллюстрирующая процедуру определения координат объекта при использовании трех измерений, а на фиг. 4 изображена структурная схема устройства, реализующего предложенный способ.
Для фиг. 1 введены следующие обозначения: N и S северный и южный полюсы постоянного магнита 1, являющегося излучателем магнитного поля и вращающегося с постоянной угловой скоростью ω в декартовой системе координат с осями у и х; «1», «2» и «3» - три положения приемника, отличающиеся различными углами по отношению к излучателю (магниту); В1 - индукция магнитного поля приемника в точке «1», В2 - индукция магнитного поля приемника в точке «2», В3 - индукция магнитного поля приемника в точке «3»; α1 и α3 - временные отклонения индукции в точках измерения от исходной синусоиды индукции излучателя, характеризующие углы расположения приемника по отношению к излучателю для трех выбранных точек в пространстве. Следует указать, что для точки «2» угол α2=0, то есть приемник находится соосно с излучателем. На фиг. 2 изображены две расположенные под углом 90° и неподвижные в пространстве рамка излучателя х 2, ориентированная по оси «х» и рамка излучателя у 3, ориентированная по оси «у» с токами ix и iy соответственно. Рамки излучателя х и у 2 и 3 играют роль излучателя магнитного поля, управление которым производится путем регулирования мгновенных значений токов в рамках по синусоидальному закону. Токи ix и iy в рамках излучателя х и у 2 и 3 сдвинуты друг относительно друга на 90 электрических градусов, что позволяет синтезировать вращающееся магнитное поле, аналогичное тому, которое получается при использовании магнита на фиг. 1. Остальные обозначения на фиг. 2 аналогичны обозначениям фиг. 1. На фиг. 3 использованы следующие обозначения: х, у и z - ортогональные оси, соответствующие трем рамкам излучателя; Вх, By и Bz - проекции вектора индукции, измеренного приемником, на оси; r - результирующий вектор магнитной индукции В, измеренный приемником; α, β и γ - угловые показатели, характеризующие расположение объекта относительно излучателя. На фиг. 4 обозначены: 2 - рамка излучателя х, 3 - рамка излучателя у, 4 - рамка излучателя z, ориентированные друг относительно друга под углом в 90 геометрических градусов. Рамки 2, 3 и 4 подключены к выходам первого усилителя тока 5, второго усилителя тока 6 и третьего усилителя тока 7 соответственно. Усилители тока 5, 6 и 7 формируют на своих выходах электрический ток, достаточный для создания требуемого магнитного потока, формируемого рамками излучателя х, у и z 2, 3 и 4 в трех взаимоперпендикулярных направлениях. В свою очередь, вход первого усилителя тока 5 соединен с первым выходом первого коммутатора 8, вход второго усилителя тока 6 соединен со вторым выходом первого коммутатора 8, вход третьего усилителя тока 7 соединен с третьим выходом первого коммутатора 8. К первому информационному входу первого коммутатора 8 подключен выход первого генератора 9, а ко второму информационному входу первого коммутатора подключен выход второго генератора 10. Первый 9 и второй 10 генераторы вырабатывают на своих выходах синусоидальные сигналы, сдвинутые друг относительно друга на 90 электрических градуса, как показано на фиг. 2. Это позволяет синтезировать вращающееся магнитное поле. Контроллер 11 на первом своем выходе, соединенном с управляющим входом первого коммутатора 8, формирует сигнал управления, который указывает на порядок подключения первого генератора 9 и второго генератора 10 к первому 5, второму 6 и третьему 7 усилителям. Для выбора режима контроллера 11 предусмотрен пульт управления 12, сигнал с выхода которого подключен ко входу контроллера 11. Второй выход контроллера 11 подключен к управляющему входу второго коммутатора 13, первый выход второго коммутатора 13 через вычислитель констант 14 соединен с первым входом вычислителя 15, второй вход которого подключен к третьему выходу контроллера 11, третий вход вычислителя 15 соединен со вторым выходом второго коммутатора 13. Определение магнитной индукции, сформированной в точке измерения рамкой излучателя х 2, рамкой излучателя у 3 и рамкой излучателя z 4, осуществляется рамкой приемника х 16, рамкой приемника у 17 и рамкой приемника z 18. Напряжения Ux, Uy и Uz, появившиеся от воздействия изменяющегося во времени магнитного поля излучателя на соответствующих рамках приемника, подключены следующим образом. Рамка приемника х 16 через измеритель индукции Вх 19 подключена к информационному входу первого синхронного фильтра 20, выход которого соединен с первым информационным входом второго коммутатора 13. Рамка приемника у 17 через измеритель индукции By 21 подключена к информационному входу второго синхронного фильтра 22, выход которого соединен со вторым информационным входом второго коммутатора 13. Рамка приемника z 18 через измеритель индукции Bz 23 подключена к информационному входу третьего синхронного фильтра 24, выход которого соединен с третьим информационным входом второго коммутатора 13. Кроме этого выход первого генератора 9 соединен с синхронизационными входами первого синхронного фильтра 20, второго синхронного фильтра 22 и третьего синхронного фильтра 24, а выход пульта управления 12 подключен к управляющим входам первого синхронного фильтра 20, второго синхронного фильтра 22 и третьего синхронного фильтра 24. Измеритель индукции х 19, измеритель индукции у 21 и измеритель индукции z 22 предназначены для преобразования напряжений Ux, Uy и Uz в напряжения, соответствующие магнитной индукции для каждой из осей с учетом частоты сигнала излучателя, количества витков и размера рамок и их конструктивных особенностей.
Способ осуществляют следующим образом. Предлагаемый способ, в основе которого лежит вращающееся магнитное поле, и определение координат относительно начала поворота индукции магнитного поля излучателя, позволяет обойтись без использования сложной математической модели магнитного поля излучателя при определении координат приемника.
Вращающееся магнитное поле может быть создано, например, вращающимся магнитом 1 (фиг. 1). Приведенные временные диаграммы индукции магнитного поля В в различных точках пространства являются иллюстрацией предлагаемого принципа определения координат. При вращении магнита с угловой скоростью со можно определить смещение по времени вектора магнитной индукции в точке измерения. На фиг. 1 показаны три точки пространства (1, 2 и 3), в которых измеряется магнитная индукция В. Если синхронизировать временные диаграммы с углом поворота магнита 1, то по временной диаграмме, снимаемой с датчика, можно определить угол вектора, соединяющего датчик с осью вращения излучателя. Это угол -α1 для точки 1 или +α3 для точки 3. Для точки 2 этот угол нулевой. При вращении магнита 1 в трех плоскостях можно определить углы вектора индукции во всех плоскостях, как показано на фиг. 3. Однако механическое вращение магнита 1 имеет ряд недостатков: невозможно вращать магнит одновременно в трех плоскостях; частота вращения магнита 1 ограничена энергетическими конструктивными и технологическими возможностями.
Поле можно вращать электрически. Для этого в рамке излучателя х 2 и рамке излучателя у 3, расположенных перпендикулярно плоскости вращения магнитного поля создают ток синусоидальной формы, сдвинутый на 90 электрических градусов друг относительно друга (фиг. 2). Магнитное поле, генерируемое каждой рамкой, складывается геометрически. В пространстве образуется вращающееся магнитное поле, аналогичное механическому вращению магнита.
Для создания вращающегося поля в трех плоскостях используются три рамки, расположенные перпендикулярно друг относительно друга в плоскостях х (рамка излучателя х 2), у (рамка излучателя у 3), z (рамка излучателя z 4) как показано на фиг. 4. При создании вращающегося магнитного поля поочередно во времени используется пара рамок излучателя: рамка излучателя х 2, рамка излучателя у 3; рамка излучателя х 2, рамка излучателя z 4; рамка излучателя у 3, рамка излучателя z 4. По рамкам в каждой паре протекает синусоидальный ток, сдвинутый по фазе на 90 градусов друг относительно друга.
Для измерения магнитного поля используется трехкоординатный приемник. Одним из вариантов измерения магнитного поля является измерение потенциала в приемной рамке. Для измерения трех векторов магнитного поля используются три рамки, расположенные в перпендикулярных плоскостях. Величина магнитной индукции получается геометрическим сложением векторов, полученных с данных рамок, как показано на фиг. 3.
Допустим, ориентация объекта в пространстве известна и измерительные рамки расположены в плоскости рамок излучения. Для простоты изложения предположим, что излучателем магнитного поля является диполь.
Для примера проведем расчет координат по измеренным величинам. Представим декартову систему координат х, у, z. После проведения трех опытов при вращении магнитного поля в трех плоскостях и измерения вектора магнитного поля известны данные углов расположения объекта α, β, γ и значение вектора магнитной индукции поля В (фиг. 3). В первом опыте ток подается на рамки, расположенные в плоскостях X, Y, во втором опыте - в плоскостях X, Z, в третьем - в плоскостях Y, Z. Уравнение, связывающее координаты и значение магнитного поля в общем виде для диполя, приведено в книге (Аналитические методы локализации дипольного источника магнитного поля / В.И. Гуменюк-Сычевский, И.В. Недайвода, М.А. Примин. - Киев, 1990. - 19 с. - (Препринт; / АН УССР. Институт кибернетики им В. М. Глушкова; 90-21)) на странице 3. Уравнение диполя проще, но им можно пользоваться при большом удалении объекта от излучателя магнитного поля. В этом случае погрешность модели незначительная.
Запишем уравнения 1 и 2 для индукции магнитного поля:

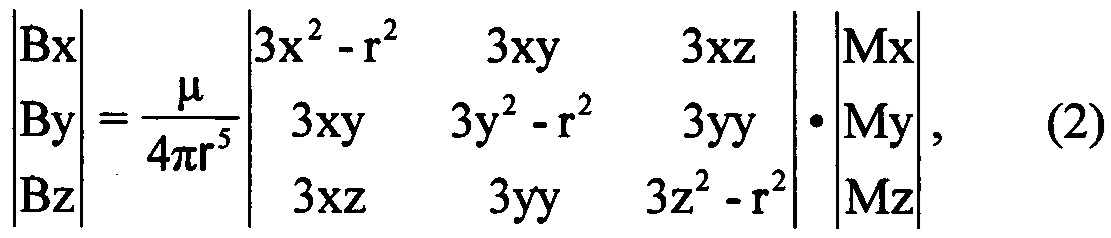
где х, у, z - геометрические координаты положения объекта в пространстве в метрах;
r - результирующий вектор магнитной индукции В;
μ=μ0*μ1;
μ0 - магнитная постоянная Гн*м; μ1 - магнитная проницаемость среды, равная 1 для воздуха;
Мх, My, Mz магнитный момент А⋅м2.
Для нахождения искомых результатов х, у, z необходимо предварительно на этапе калибровки найти некоторые константы (назовем их Кх, Ку и Кz). При этом в режиме калибровки магнитное поле создается поочередно каждой из трех рамок излучателя, а измеритель устанавливается в заданную точку с известным расстоянием от излучателя. Например, для первого опыта приемник располагается строго по оси х от излучателя (координаты у и z в этой точке равны нулю), и следовательно создается только момент Мх, a My=0, Mz=0. Обозначим константой Кх значения, которые не меняются во время данного измерения.
Эта константа и определяется при калибровке излучателя. Она зависит от протекающего тока, числа витков, площади рамки с током и конструктивных особенностей. Для этого опыта уравнение 2 может быть представлено в виде 3.
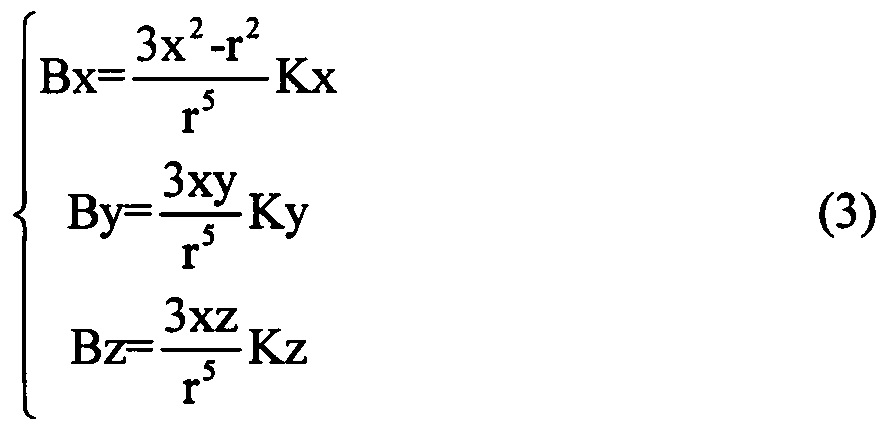
Поскольку у=0, z=0, можно определить Kх=Вх·x3/2. Помещая последовательно измеритель в точки с координатами: х=0, y=Y, z=0; х=0, у=0, z=Z в режиме калибровки можно определить оставшиеся константы Kу, Kz.
В режиме «работа», имея в виду геометрическую зависимость координат, представленную системой уравнений 4
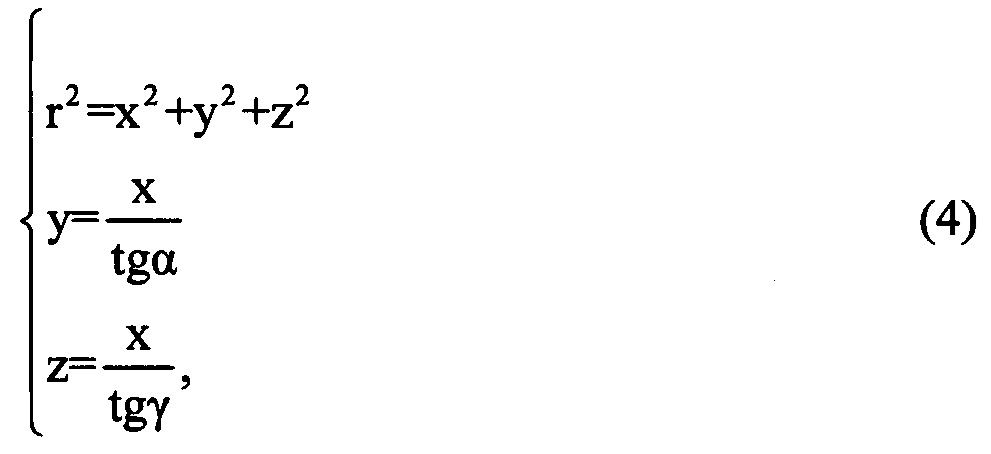
можно найти координаты в аналитическом виде, представленном для координаты х уравнением 5
Для точной модели рамки с током и для нахождения координат в ближней от излучателя зоне можно воспользоваться численным решением уравнения 1. Точное уравнение для рамки с током приведено в источнике (Желамский М.В. Электромагнитное позиционирование подвижных объектов. - М.: ФИЗМАТЛИТ, 2013. - 320 с. - ISBN 978-5-9221-1407-3) на стр. 123. Это уравнение достаточно сложное для представления в аналитическом виде. Можно воспользоваться итерационным методом. В нашем случае это достаточно просто, поскольку итерация производится по одной переменной. Другие переменные связаны соотношениями 4.
Исходя из приведенных математических выкладок, процесс определения местоположения объекта осуществляют следующим образом.
В процессе определения местоположения объекта различают два режима: «калибровка» и «работа».
Режим работы «калибровка» предназначен для определения констант Кх, Ку и Кz, участвующих в расчете координат и является наладочным. При этом сам излучатель, образованный рамками излучателя х, у и z (2, 3 и 4) располагается в заданной точке с известным расстоянием от излучателя и остается неподвижным в пространстве. В процессе первого измерения приемник располагается на заданном расстоянии х от излучателя, когда координаты у и z приемника относительно излучателя равны нулю. После выбора этого режима с пульта управления 12 на вход контроллера 11 поступает код, несущий информацию о выбранном режиме. На первом выходе контроллера 11 согласно алгоритму работы контроллера 11 формируется сигнал, который поступает на управляющий вход первого коммутатора 8. Первый коммутатор 8 по данному сигналу подключает выход первого генератора 9 через первый свой выход синусоидальный сигнал ко входу первого усилителя тока 5. Этот усилитель, служащий для согласования электрических сигналов между первым выходом первого коммутатора 8 и рамкой излучателя х 2, обеспечивает синусоидальность тока ix в рамке излучателя х 2.
Сформированное рамкой излучателя х 2 магнитное поле воспринимается рамкой приемника х 16 и в виде напряжения Ux подается на вход измерителя индукции Вх 19. Этот узел преобразует напряжение Ux в напряжение, соответствующее магнитной индукции Вх с учетом частоты сигнала излучателя, количества витков и размера рамки приемника х 16 и ее конструктивных особенностей. Далее полученный сигнал обрабатывается первым синхронным фильтром 20, назначение которого - определить амплитуду измеренного сигнала и его фазу относительно сигнала первого генератора 9. Для успешной работы первого синхронного фильтра 20 на его синхронизирующий вход подается сигнал от первого генератора.
Работа синхронных фильтров 20, 22 и 24 одинакова и заключается в следующем. Синхронный фильтр применяется, когда частота сигнала, поступающего от приемника ω, как в нашем случае, точно известна. Пусть есть периодический сигнал: Acos(ωt+α), где надо найти амплитуду А и фазу α относительно опорного сигнала такой же частоты, поступающего от первого генератора 9. Проводим математическую операцию, умножая сигнал, поступающий с приемника и имеющий фазовый сдвиг α, на сигнал sin(ωt) и cos(ωt), синтезировать которые при известной частоте ω достаточно просто. Получаем:


Это вытекает из математических формул:
cos(α)cos(β)=l/2(cos(α-β)+cos(α+β)) cos(α)sin(β)=l/2(sin(α-β)+sin(α+β)) Если провести интегрирование (суммирование) правых выражений за период Т, то периодические составляющие будут равны нулю, и мы получим некоторые числа N и М.


Отсюда вычисляем амплитуду и фазу сигнала:


Поскольку на этапе калибровки необходимо определить только амплитуду сигнала, первый синхронный фильтр 20 получает от пульта управления 12 сигнал о режиме калибровка, поступающий на управляющий вход первого синхронного фильтра 20. По этому сигналу алгоритм работы первого синхронного фильтра настраивается на определение только амплитуды индукции Вх по формулам 8, 9 и 10.
Полученный сигнал об амплитуде индукции Вх с выхода первого синхронного фильтра 20 подается на первый информационный вход второго коммутатора 13, на управляющий вход которого от контроллера 11 приходит код управления, указывающий на то, что выбран режим калибровки и на то, какая из рамок (в данном случае рамка излучателя х 2) участвует в режиме калибровки. По данному сигналу управления второй коммутатор 13 передает сигнал с первого синхронного фильтра 20 на первый выход второго коммутатора 13, что приводит к появлению на входе вычислителя констант 14 информации о величине магнитной индукции Вх, измеренной рамкой приемника х 16. Эта величина позволяет по формуле, полученной выше, вычислить константу Kх=Вх·х3/2, учитывая что величина х задана расстоянием, но котором в режиме калибровки находятся излучатель и приемник. Полученное значение Кх с выхода вычислителя констант 14 поступает на первый вход вычислителя 15, в котором и фиксируется.
После этого можно приступить к определению констант Ку и Кz, для чего аналогичным порядком как и в случае определения Кх помещают поочередно и последовательно рамку приемника у 17 и рамку приемника z 18 в точки с координатами х=0, y=Y, z=0; х=0, у=0, z=Z. При этом измеряют известные геометрические
показатели у и z, что позволяет определить константы Kу и Kz так, как изложено ранее для константы Кх. В порядке определения констант в режиме калибровки имеются следующие особенности. При определении Kу по сигналу с пульта управления 12 на вход контроллера 11 поступает код, несущий информацию о выбранном режиме. На первом выходе контроллера 11 согласно алгоритму работы контроллера 11 формируется сигнал, который поступает на управляющий вход первого коммутатора 8. Первый коммутатор 8 по данному сигналу подключает синусоидальный сигнал с выхода первого генератора 9 через второй свой выход ко входу второго усилителя тока 6. Этот усилитель, служащий для согласования электрических параметров выхода первого коммутатора 8 и рамки излучателя у 3, обеспечивает синусоидальность тока iy в рамке излучателя у 3. При этом излучатель, образованный рамками 2, 3 и 4 располагается в заданной точке с известным расстоянием у от приемника и остается неподвижным в пространстве.
Сформированное рамкой излучателя у 3 магнитное поле воспринимается рамкой приемника у 17 и в виде напряжения Uy подается на вход измерителя индукции By 21. Этот узел преобразует напряжение Uy в напряжение, соответствующее магнитной индукции By с учетом частоты сигнала излучателя, количества витков и размера рамки у приемника 17 и ее конструктивных особенностей. Далее полученный сигнал обрабатывается вторым синхронным фильтром 22, назначение и принцип действия которого такие же, как и для первого синхронного фильтра 20. Сигнал о величине индукции By с выхода второго синхронного фильтра подается на второй информационный вход второго коммутатора 13, на управляющий вход которого от контроллера 11 приходит код управления, указывающий на то, что выбран режим калибровки и на то, какая из рамок (в данном случае рамка у излучателя 3) участвует в режиме калибровки. По данному сигналу управления второй коммутатор 13 передает сигнал со второго синхронного фильтра 22 на первый выход второго коммутатора 13, что приводит к появлению на входе вычислителя констант 14 информации о величине магнитной индукции By, измеренной рамкой приемника у 17. Эта величина позволяет по формуле, полученной выше, вычислить константу Kу=Ву·у3/2, учитывая, что величина у задана расстоянием, на котором в режиме калибровки находятся излучатель и приемник. Полученное значение Ку с выхода вычислителя констант 14 поступает на первый вход вычислителя 15, в котором и фиксируется.
Далее производят определение Кz, располагая рамку приемника z 18 в точку с координатами х=0, у=0, z=Z. При этом в процессе расчета Кz по сигналу от пульта управления 12 участвуют контроллер 11, формирующий на своем первом выходе код, управляющий первым коммутатором 8, первый коммутатор 8 подключает к третьему выходу первый генератор 9. Третий усилитель тока 7 формирует на своем выходе синусоидальный ток iz, поступающий в рамку излучателя z 4. В процессе приема информации, необходимой для расчета Кz, участвуют рамка приемника z 18, измеритель индукции Bz 23, третий синхронный фильтр 24, сигнал с выхода которого поступает на третий информационный вход второго коммутатора 13. Работа вычислителя констант 14 и вычислителя 15 аналогична двум ранее рассмотренным случаям. Величина Кz определяется по выражению Kz=Bz·z3/2. На этом режим калибровки заканчивается.
По окончания калибровки с пульта управления 12 на вход контроллера 11 поступает код, соответствующий режиму «работа». При этом рамки излучателя 2, 3 и 4 располагаются в заданной точке, а рамки приемника 16, 17 и 18 располагаются в точке, координаты которой необходимо определить. На своем первом выходе контроллер 11 вырабатывает сигнал, поступающий на управляющий вход первого коммутатора 8. Этот сигнал содержит информацию о том, какая пара рамок излучателя участвует в данном этапе работы. Пусть первоначально в качестве источника вращающегося магнитного поля выбраны рамка излучателя х 2 и рамка излучателя у 3. В этом случае первый коммутатор 8 подключает первый генератор 9 через первый усилитель тока 5 к рамке излучателя х 2 и обеспечивает протекание в ней синусоидального тока с заданной частотой ω. В то же время коммутатор 8 соединяет второй генератор 10, подключенный ко второму входу коммутатора 8, ко второму своему выходу и через второй усилитель тока к рамке излучателя у 3. При этом первый и второй генераторы 9 и 10 формируют на первом и втором входах первого коммутатора 8 синусоидальные сигналы, сдвинутые друг относительно друга на 90 электрических градусов, что обеспечивает формирование рамками излучателя х 2 и рамкой излучателя у 3 вращающегося магнитного поля. Для определения величины и фазового сдвига магнитного поля в точке измерения относительно излучаемого используют рамку приемника х 16. Полученный сигнал от рамки приемника х 16 обрабатывается измерителем индукции Вх 19 и поступает на информационный вход первого синхронного фильтра 20. На синхронизирующий вход синхронного фильтра 29 к этому моменту с выхода первого генератора 9 поступает синусоидальный сигнал, относительно которого необходимо кроме индукции Вх определить (в отличие от режима «калибровка») еще и фазовый сдвиг α (смотри фиг. 3). Эти величины с выхода первого синхронного фильтра 20 поступают на первый вход второго коммутатора 13. На управляющий вход второго коммутатора 13 со второго выхода контроллера 11 приходит информация о выбранном режиме и тех рамках излучателя, которые формируют вращающееся магнитное поле. Второй коммутатор передает информацию со своего первого информационного входа на второй выход, подключенный к третьему входу вычислителя 15. Вычислитель 15, получающий информацию о выбранном режиме работы и тех рамках излучателя, которые формируют вращающееся магнитное поле от третьего выхода контроллера 11, запоминает полученную информацию. Следующим этапом режима «работа» является процесс определения величины By и угла β. Для этого в процедуре измерения задействованы рамка излучателя у 3 и рамка излучателя z 4. По сигналу от контроллера 11 на управляющем входе первого коммутатора 8 формируется сигнал, под управлением которого первый генератор 9 подключается ко второму выходу первого коммутатора 8 и далее через второй усилитель тока 6 к рамке излучателя у 3. В свою очередь второй генератор 10 подключается первым коммутатором 8 к третьему выходу и через третий усилитель тока 7 к рамке излучателя z 4. Эти процедуры приводят к формированию в пространстве вращающегося магнитного поля, поскольку сигналы с выходов первого 9 и второго генераторов сдвинуты друг относительно друга на 90 электрических градусов. Для определения индукции By и фазового сдвига β используется рамка приемника у 17, сигнал Uy с которой поступает через измеритель индукции 21 на информационный вход второго синхронного фильтра 22. Второй синхронный фильтр за счет информации на своем синхронизирующем входе от первого генератора 9 и от пульта управления 12 на управляющем входе настроен на определение угла β и индукции By. Полученные по ранее рассмотренной методике (формулы 6-11) величины поступают на второй информационный вход второго коммутатора 13 и через второй выход подаются на третий вход вычислителя 15, где запоминаются. На третьем этапе измерения в режиме «работа» используются рамка излучателя z 4 и рамка излучателя х 2. При этом первый генератор 9 первым коммутатором 8 подключается к рамке излучателя z 4, а второй генератор 10 соединяется с рамкой излучателя х 2. В данном случае измеряется угол γ и индукция Bz. Процедура определения указанных величин аналогична ранее рассмотренным на примере углов α и β, а также величин индукций Вх и By. По окончании процедуры измерения в вычислителе присутствуют все величины, необходимые для определения координат точки, в которой находится приемник излучения. Их можно легко определить, проведя вычисления по системе уравнений (4) и уравнению (5). Это происходит по сигналу от пульта управления 12, который, подавая сигнал на вход контроллера 11, формирует на третьем выходе контроллера 11 сигнал, поступающий на второй вход вычислителя 15 и служащий командой на начало итоговых вычислений. Использование предлагаемого способа предполагает отказ от использования математической модели магнитного поля, что повышает точность измерений и сокращает процедуру вычислений, увеличивая быстродействие установки.
Устройство для определения местоположения объекта работает следующим образом. В режиме «калибровка» излучатель, представляющий собой рамку излучателя х 2, рамку излучателя у 3 и рамку излучателя z 4, располагаемые взаимоперпендикулярно друг другу, помещают в какую либо точку пространства. Приемник, образованный тремя рамками (рамкой приемника х 16, рамкой у 17 и рамкой z 18) помещают в точку с координатами (х, 0, 0) по отношению к излучателю, при этом расстояние х заранее известно. Пульт управления 12 на своем первом выходе формирует сигнал, который поступает на вход контроллера 11. С первого выхода контроллера 11 на управляющий вход первого коммутатора 8 поступает сигнал, который подключает первый генератор 9 к первому выходу первого коммутатора и далее через первый усилитель тока 5 к рамке излучателя х 2. Рамка начинает формировать магнитное поле, фиксируемое приемником.
На всех рамках приемника 16, 17 и 18 появляются напряжения Ux, Uy и Uz, которые через измеритель индукции х 19, измеритель индукции у 21 и измеритель индукции z 23 формируют сигналы на информационных входах первого синхронного фильтра 20, второго синхронного фильтра 22 и третьего синхронного фильтра 24. При этом на синхронизирующих входах указанных фильтров присутствует синхросигнал от первого генератора 9, а на управляющих входах - сигнал от пульта управления 12. Сигнал от пульта управления 12 на управляющих входах синхронных фильтров 20, 22 и 24 в данном режиме «калибровка» предписывает синхронным фильтрам определять только величину амплитуды индукций, измеренных рамками приемника. На выходах синхронных фильтров 20, 22 и 24 появляется информация об амплитуде сигналов, характеризующих индукцию, измеренную соответствующими рамками приемника. Однако по сигналу со второго выхода контроллера 11, подключенного к управляющему входу второго коммутатора на вход вычислителя констант 14 через первый выход второго коммутатора поступает сигнал только с рамки приемника х 16, обработанный измерителем индукции х 19 и первым синхронным фильтром 20. Вычислитель констант 14 рассчитывает коэффициент Кх, необходимый в дальнейшем для определения координат расположения приемника по оси х. Эта величина поступает на первый вход вычислителя 15 и сохраняется там. На втором этапе выполнения режима «калибровка» приемник переносится в точку с координатами (0, у, 0), для которой расстояние у заранее известно, и процесс определения коэффициента Ку повторяет процесс определения коэффициента Кх с той лишь разницей, что по сигналу от пульта управления 12 контроллер 11 формирует на своем первом выходе сигнал, предписывающий первому коммутатору 8 подключить первый генератор 9 через второй усилитель тока 6 к рамке излучателя у 3. В то же время второй коммутатор 13, получивший на своем управляющем входе сигнал от контроллера 11, коммутирует информацию о величине индукции By, полученную от рамки приемника у 17, обработанную измерителем индукции By 21 и вторым синхронным фильтром 22 со второго своего информационного входа на вход вычислителя констант 14. В вычислителе констант 14 происходит расчет коэффициента Ку, величина которого после расчета поступает на первый вход вычислителя 15 и там хранится. После этого приемник помещают в точку с координатами (0, 0, z), для которой заранее известна координата z. Контроллер 11 формирует на своем первом выходе сигнал, предписывающий первому коммутатору 8 подключить первый генератор 9 через третий усилитель тока 7 синусоидальный сигнал заданной частоты к рамке излучателя z 4. Прием сигналов, определяющих величину индукции Bz сформированного излучателем магнитного поля, производится аналогично вышерассмотренному, но второй коммутатор 13, по сигналу со второго выхода контроллера 11, поступающего на управляющий вход второго коммутатора 13, подключает к вычислителю констант 14 информацию от третьего синхронного фильтра 24. Вычислитель констант 14 определят величину Кz и передает ее на хранение в вычислитель 15 через первый его вход. На этом режим «калибровка» заканчивается.
В режиме «работа» пульт управления 12 на своем выходе формирует код, соответствующий указанному режиму. Этот код поступает на вход контроллера 11, который передает сигнал на управляющий вход первого коммутатора 8. По этому сигналу первый коммутатор 8 подключает первый генератор 9, вырабатывающий синусоидальный сигнал с частотой ω, через первый усилитель тока 5 к рамке излучателя х 2. Кроме этого первый коммутатор 8 соединяет второй генератор 10, вырабатывающий синусоидальный сигнал с частотой со, но сдвинутый на 90 электрических градусов по отношению к сигналу первого генератора 9, через второй усилитель тока 6 с рамкой излучателя у 3. Рамки начинают излучать вращающееся магнитной поле, воспринимаемое приемником. На данном этапе осуществления режима «работа» измеряется величина индукции Вх и угол α, которые указывают на координаты расположения приемника по отношению к излучателю, соответствующие фиг. 3. В этом положении оценивается сигнал Ux, фиксируемый рамкой приемника х 16. Поступая на измеритель индукции 19 и далее на информационный вход первого синхронного фильтра 20, этот сигнал позволяет оценить не только величину амплитуды индукции Вх (как это было в режиме «калибровка»), но и фазовый сдвиг α, для чего на синхронизирующий вход первого синхронного фильтра 20 поступает сигнал с выхода первого генератора 9, а на управляющий вход - сигнал с выхода пульта управления 12. Сигнал с пульта управления позволяет отличить режим «работа» от «калибровка» и изменить алгоритм работы первого синхронного фильтра 20. Информация о величинах Вх и α, полученная первым синхронным фильтром 20, приходит на первый информационный вход второго коммутатора, который по сигналу, поступающему на управляющий вход от контроллера 11, соединяет первый информационный свой вход со вторым выходом и далее с третьим входом вычислителя 15. В вычислитель поступает информация о величинах Вх и α, где хранится до проведения окончательных расчетов. Далее первый коммутатор 8 по сигналу контроллера 11 подключает первый генератор 9 ко второму усилителю тока 6 и далее к рамке излучателя у 3, а второй генератор 19 через усилитель тока 7 к рамке излучателя z 4. Тем самым формируется вращающееся магнитное поле, позволяющее измерить величину By и угол β, как было показано на этапе описания способа. В этом положении оценивается сигнал Uy, фиксируемый рамкой приемника у 17. Поступая на измеритель индукции 21 и далее на информационный вход второго синхронного фильтра 22, этот сигнал позволяет оценить не только величину амплитуды индукции By, но и фазовый сдвиг β, для чего на синхронизирующий вход второго синхронного фильтра 22 поступает сигнал с выхода первого генератора 9, а на управляющий вход - сигнал с выхода пульта управления 12. Сигнал с пульта управления позволяет отличить режим «работа» от «калибровка» и изменить алгоритм работы второго синхронного фильтра 20 по сравнению с режимом «калибровка». Информация о величинах By и β, полученная вторым синхронным фильтром 22, приходит на второй информационный вход второго коммутатора 13, который по сигналу, поступающему на его управляющий вход от контроллера 11, соединяет второй информационный свой вход со вторым выходом и далее с третьим входом вычислителя 15. В вычислитель поступает информация о величинах By и β, где хранится до проведения окончательных расчетов. На третьем этапе режима «работа» проводятся измерения величин Bz и угла γ. При этом последовательность измерений не меняется, с той лишь разницей, что в работе излучателя задействованы первый генератор 9, подключаемый через третий усилитель тока 7 к рамке излучателя z 4 и второй генератор 10, который подключается к рамке излучателя х 2 через первый усилитель тока 5. Эти соединения осуществляются первым коммутатором 8 под управлением контроллера 11. Измерение магнитной индукции в точке установки приемника производят рамкой приемник z 18, при этом напряжение Uz после обработки измерителем индукции Bz 23 анализируется третьим синхронным фильтром 24, который сигналами на своих синхронизирующем и управляющем входах настроен на измерение Bz и угла γ. После измерения эти параметров они, появляясь на третьем входе второго коммутатора 13, через второй выход второго коммутатора 13 передаются на третий вход вычислителя 15, в котором фиксируются. Устройство готово к расчету. Расчет координат расположения приемника проводится вычислителем 15 по системе уравнений (4) и формуле (5).
Установив приемник на объект, местоположение которого необходимо определить, можно узнать координаты х, у, и z объекта.
Исключение из алгоритма расчета координат математической модели магнитного поля позволяет исключить из алгоритма определения сложную математическую модель магнитного поля, зависящую от многих внешних факторов и обойтись только геометрическими и электромагнитными измерениями, что повышает точность измерения и сокращает время проведения испытаний.
Таким образом, предложенный вариант реализации способа и устройства позволяет улучшить показатели измерения по быстродействию и точности.
Устройство для магнитной стимуляции
Устройство для магнитной стимуляции

