Результат интеллектуальной деятельности: АКСЕЛЕРОМЕТР
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано при решении задач навигации, управления, гравиметрии.
Известны маятниковые акселерометры, предназначенные для измерения кажущегося ускорения, содержащие маятник (чувствительный элемент) и цепь обратной связи (датчик положения, усилитель, исполнительный элемент) [Командно-измерительные приборы / Под ред. Назарова Б.И. - М.: МО СССР, 1975].
Известен способ компенсационного измерения кажущегося ускорения [Лукьянов Д.П. Акселерометры инерциальных систем навигации: Конспект лекций - Л.: ЛЭТИ, 1983. - 47 с.], заключающийся в том, что кажущееся ускорение, воздействуя на пробную массу, создает момент, который компенсируют при помощи момента, создаваемого "электрической пружиной", состоящей из датчика угла, усилителя и датчика моментов, при этом ток датчика моментов пропорционален кажущемуся ускорению. Этот способ позволяет создавать прецизионные акселерометры компенсационного типа с разрешающей способностью в несколько микро g. Однако такие акселерометры очень дороги.
Известен способ микромеханического преобразования кажущегося ускорения [Лукьянов Д.П., Скворцов В.Ю. Микроэлектронные акселерометры инерциальных систем навигации: Учеб. пособие / СПбГЭТУ "ЛЭТИ". СПб., 1999. 60 с.], заключающийся в том, что кажущееся ускорение, воздействуя на пробную массу, подвешенную на упругом подвесе, вызывает микроперемещение пробной массы, которое измеряют с помощью емкостных датчиков. Этот способ позволяет создавать микромеханические акселерометры различного диапазона измерения. Преимуществом микромеханических акселерометров является их дешевизна, а недостатком - низкая точность и нестабильность.
Общим недостатком данных устройств является сложность, высокая стоимость и существенное уменьшение точности при проведении измерений на границах диапазона работы акселерометра.
Наиболее близким по техническому исполнению к предложенному устройству является акселерометр [Патент №2566655, РФ, Гупалов В.И.], содержащий пьезоблок, генератор знакопеременного сигнала, пьезоэлектрический возбудитель, два идентичных пьезоэлектрических преобразователя, два усилителя заряда, дифференциальный усилитель и преобразователь амплитуды в сигнал постоянного тока.
Недостатками данного устройства являются сложность и требование идентичности пьезоэлектрических преобразователей, выполнить которое достаточно сложно.
Заявленное устройство направлено на упрощение решения задачи измерения кажущегося ускорения и расширение диапазона его измерения.
Поставленная задача возникает при измерении ускорения во время различных виброиспытаний и гравиметрических исследований, навигационных измерений и пр.
Сущность изобретения состоит в том, что в устройство, содержащее пьезоэлектрический преобразователь, пробную массу, введены N-разрядный аналого-цифровой преобразователь, микроконтроллер, N-разрядный цифро-аналоговый преобразователь, электромагнит, выход пьезоэлектрического преобразователя подключен ко входу N-разрядного аналого-цифрового преобразователя, N-разрядный выход аналого-цифрового преобразователя подключен к N-разрядному входу микроконтроллера, управляющий N-разрядный выход микроконтроллера подключен к N-разрядному входу цифро-аналогового преобразователя, выход которого подключен ко входу электромагнита, электромагнит, пробная масса и пьезоэлектрический преобразователь расположены по одной оси, пробная масса жестко соединена с пьезоэлектрическим преобразователем, изготовлена из магнитного материала и находится в зоне максимального влияния электромагнита, а выходом устройства является информационный N-разрядный выход микроконтроллера.
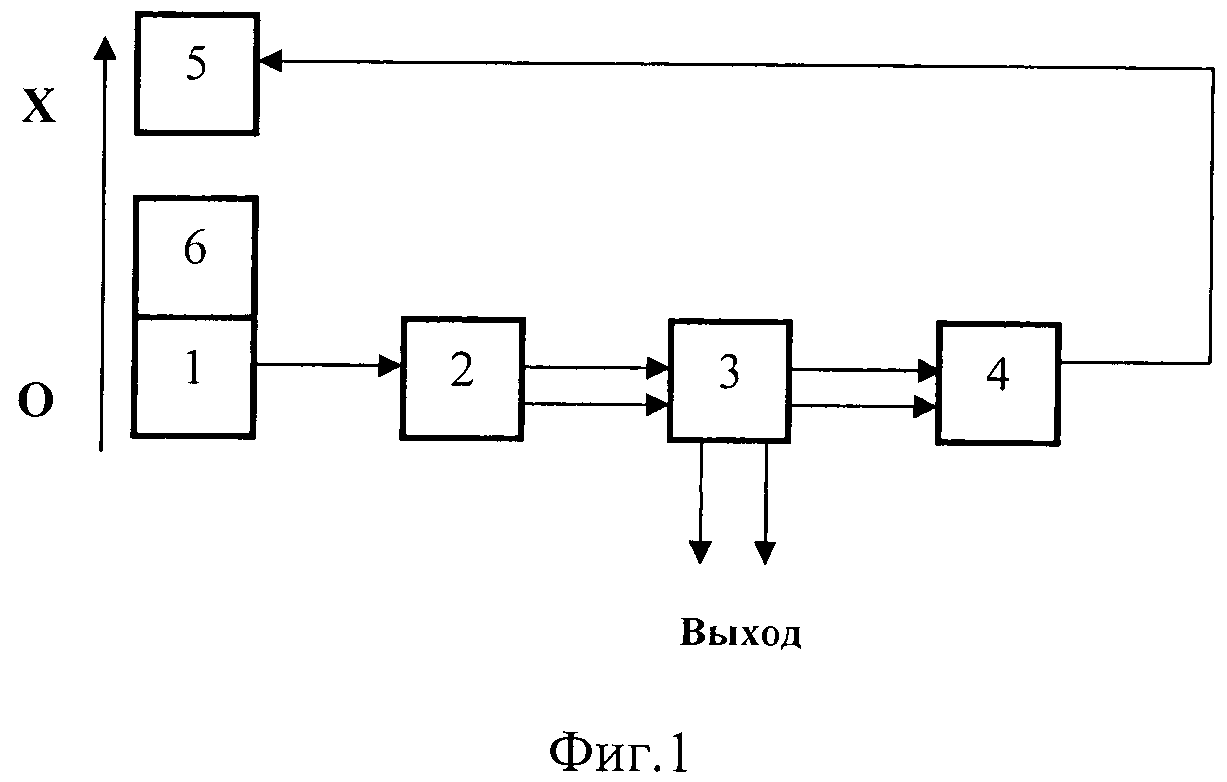
На чертеже представлена функциональная схема акселерометра.
Устройство состоит из пьезоэлектрического преобразователя 1, N-разрядного аналого-цифрового преобразователя 2, микроконтроллера 3, N-разрядного цифро-аналогового преобразователя 4, электромагнита 5, пробной массы 6.
Выход пьезоэлектрического преобразователя 1 подключен ко входу N-разрядного аналого-цифрового преобразователя 2, N-разрядный выход аналого-цифрового преобразователя 2 подключен к N-разрядному входу микроконтроллера 3, управляющий N-разрядный выход микроконтроллера 3 подключен к N-разрядному входу цифро-аналогового преобразователя 4, выход N-разрядного цифро-аналогового преобразователя 4 подключен ко входу электромагнита 5.
Выходом устройства является информационный N-разрядный выход микроконтроллера 3.
Пьезоэлектрический преобразователь 1, электромагнит 5 и пробная масса 6 расположены по одной оси. Пробная масса 6 жестко соединена с пьезоэлектрическим преобразователем, изготовлена из магнитного материала и находится в зоне максимального влияния электромагнита 5.
N-разрядный аналого-цифровой преобразователь 2 способен осуществлять преобразование двуполярного сигнала, например, может быть выполнен аналогично описанному в [16-разрядные АЦП с входным напряжением ±5 В, скоростью преобразования 500/250 квыб/сек и встроенным ИОН / Аналоговый мир Maxim. Новые микросхемы. Выпуск №2, 2013 г., стр. 5].
В свою очередь, N-разрядный цифро-аналоговый преобразователь 4 способен осуществлять формирование на выходе двуполярного сигнала и может быть выполнен, например, аналогично описанному в [18-бит прецизионный ЦАП с цифровым управлением смещения и усиления с интерфейсом SPI / Аналоговый мир Maxim. Новые микросхемы. Выпуск №2, 2013 г., стр. 13].
N-разрядный аналого-цифровой преобразователь 2 и N-разрядный цифро-аналоговый преобразователь 4 могут входить в состав микроконтроллера 3. Устройство работает следующим образом.
При возникновении ускорения «а» в направлении оси ОХ на пробную массу 6 действует сила инерции F=-ma, где а - ускорение, m - ее масса. Пробная масса 6 деформирует пьезоэлектрический преобразователь 1. На выходе пьезоэлектрического преобразователя 1 возникает импульсный электрический сигнал соответствующей полярности с амплитудой, пропорциональной ускорению «а». Данный сигнал поступает на вход N-разрядного аналого-цифрового преобразователя 2, с выхода которого соответствующий двоичный код Кt поступает на N-разрядный вход микроконтроллера 3. Микроконтроллер 3 осуществляет суммирование двоичного N-разрядного кода Кt, полученного с выхода аналого-цифрового преобразователя 2 в текущий момент времени t, с двоичным N-разрядным кодом К(t-1), хранящимся в микроконтроллере 3 с предыдущего (t-1)-го шага (в начальный момент времени хранящийся в микроконтроллере 3 код равен нулю). Результат суммирования Кt+К(t-1) запоминается в микроконтроллере 3 и с его управляющего N-разрядного выхода поступает далее в N-разрядный цифро-аналоговый преобразователь 4.
Сигнал, снимаемый с выхода N-разрядного цифро-аналогового преобразователя 4, формирует на входе электромагнита 5 ток соответствующей амплитуды, приводящий к созданию действующей на пробную массу 6 силы электромагнитной индукции, равной по величине силе инерции F и противоположно ей направленной.
Деформация пьезоэлектрического преобразователя 1 становится равной нулю, что приводит к появлению на его выходе импульса противоположной полярности. Данный сигнал поступает на вход аналого-цифрового преобразователя 2, с выхода которого соответствующий двоичный код поступает на вход микроконтроллера 3. В течение времени осуществления компенсации деформации пьезоэлектрического преобразователя 1 (которое известно и фиксировано) микроконтроллер 3, получив двоичный код с выхода аналого-цифрового преобразователя 2, суммирование с двоичным кодом, хранящимся в микроконтроллере 3, не производит.
Измеряемое ускорение вычисляется в микроконтроллере 3 по формуле:

где а - измеряемое ускорение;
F - сила инерции;
Кп - коэффициент пропорциональности между создаваемой силой электромагнитной индукции, равной по величине силе инерции, и значением двоичного кода на выходе N-разрядного аналого-цифрового преобразователя 2;
m - масса пробной массы 6.
Результат вычисления ускорения в виде N-разрядного кода поступает с информационного N-разрядного выхода микроконтроллера 3 на выход устройства.
Далее процесс повторяется - пьезоэлектрический преобразователь 1 находится в исходном (ненагруженном) состоянии и готов к новой деформации.
Таким образом, в результате компенсации силы инерции, действующей на пробную массу, возможно измерение ускорения, амплитуда которого лежит за пределами верхней границы диапазона измерения пьезоэлектрического преобразователя.
Простота данного акселерометра и возможность расширения диапазона измерения пьезоэлектрического преобразователя делают его весьма перспективным при разработке и создании навигационных систем, а также аппаратуры для виброиспытаний и гравиметрических исследований.
Акселерометр, содержащий пьезоэлектрический преобразователь, пробную массу, отличающийся тем, что в него введены N-разрядный аналого-цифровой преобразователь, микроконтроллер, N-разрядный цифроаналоговый преобразователь, электромагнит, выход пьезоэлектрического преобразователя подключен к входу N-разрядного аналого-цифрового преобразователя, N-разрядный выход аналого-цифрового преобразователя подключен к N-разрядному входу микроконтроллера, управляющий N-разрядный выход микроконтроллера подключен к N-разрядному входу цифроаналогового преобразователя, выход которого подключен к входу электромагнита, электромагнит, пробная масса и пьезоэлектрический преобразователь расположены по одной оси, пробная масса жестко соединена с пьезоэлектрическим преобразователем, изготовлена из магнитного материала и находится в зоне максимального влияния электромагнита, а выходом устройства является информационный N-разрядный выход микроконтроллера.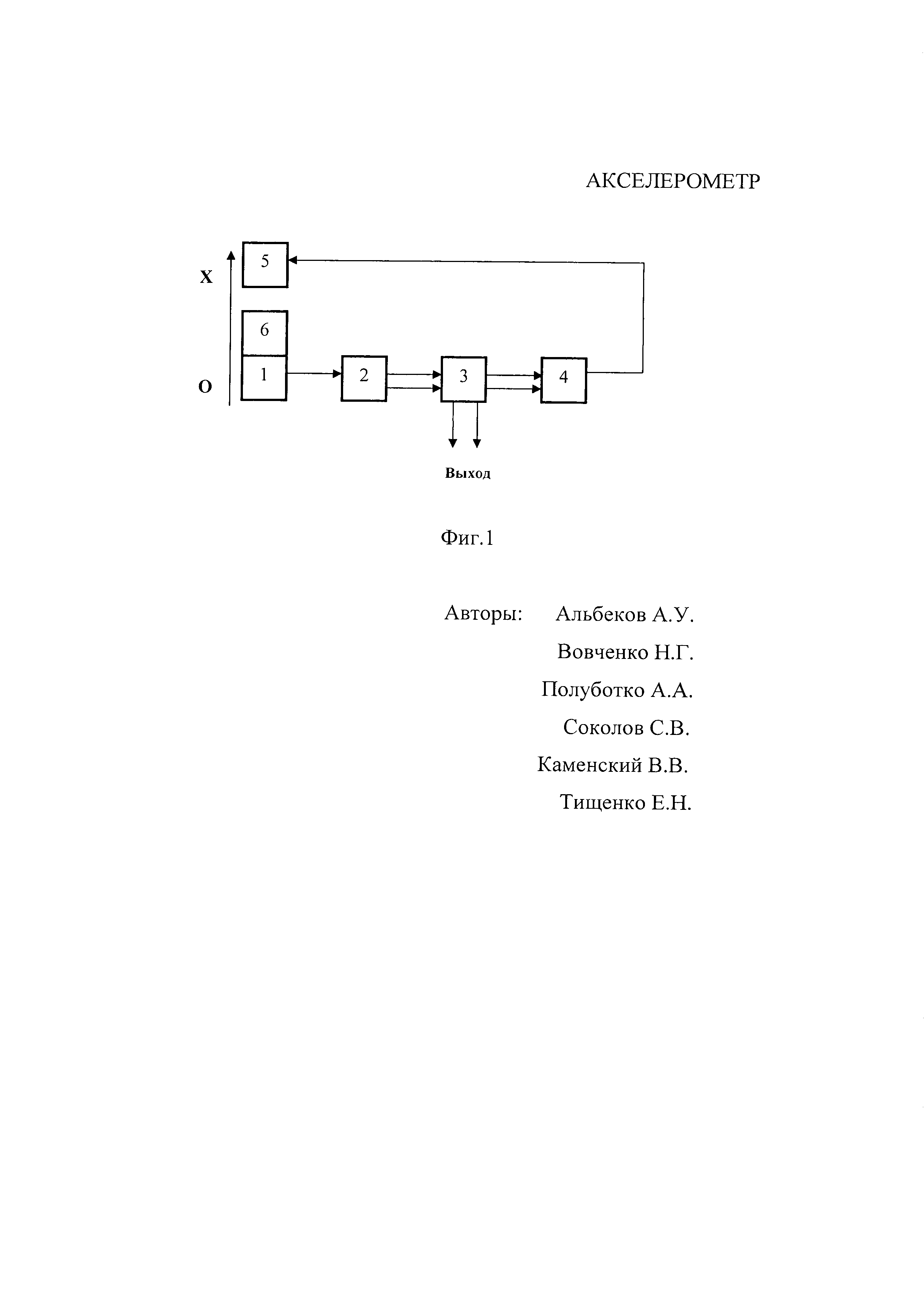
Оптический нановычислитель в системе остаточных классов
Способ дистанционного мониторинга позиционирования транспортных средств
Оптический умножитель
Оптоэлектронный компромиссный сумматор
Устройство для сортировки семян
Способ дистанционного мониторинга позиционирования транспортных средств
Способ выбора созвездия навигационных спутников
Устройство для сортировки семян
Оптоэлектронный компромиссный сумматор
Устройство позиционирования транспортных средств
Оптоэлектронный вычислитель
Способ повышения точности позиционирования транспортных средств
Оптический нановычислитель в системе остаточных классов

