Результат интеллектуальной деятельности: СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Изобретение относится к способам навигации и может быть использовано для повышения точности определения местоположения транспортных средств, движущихся по известным траекториям.
Известны способы позиционирования транспортных средств на основе приема спутниковых навигационных сигналов [ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. 3-е изд., перераб. М.: Радиотехника, 2005. 688 с.], инерциальных измерений [Андреев В.Д. Теория инерциальной навигации: автономные системы / Изд-во "Наука," Глав. ред. физико-математической лит-ры, 1966. 579 с.] и др. Недостатком данных способов является невозможность уменьшения ошибок определения координат транспортных средств, обусловленных инструментальными и методическими погрешностями навигационных систем и их чувствительных элементов.
Заявленный способ направлен на повышение точности определения текущих координат (позиционирования) транспортных средств, движущихся по известным траекториям.
Поставленная задача возникает при необходимости высокоточного позиционирования различных транспортных средств (ТС) - автомобилей, железнодорожных составов и др., движущихся по известным траекториям (автострадам, железным дорогам и т.п.).
Сущность заявленного способа состоит в том, что до начала движения ТС на основании картографической информации известная траектория движения ТС разбивается на участки, аппроксимируемые с заданной точностью ортодромическими отрезками, на которых существует функциональная связь между геоцентрическими координатами, позволяющая выразить две координаты через третью, а при движении ТС по известной траектории измеренные навигационной системой текущие геоцентрические координаты ТС проецируются на истинную ортодромическую траекторию движения ТС, при этом координаты точки проекции определяются с учетом связи между геоцентрическими координатами на ортодромии и решения иррационального уравнения относительно одной из координат, полученного из условия минимума длины ортодромического отрезка между точкой с измеренными координатами ТС и точкой проекции на истинную ортодромическую траекторию его движения, координаты которой принимаются за истинные текущие геоцентрические координаты ТС.
Существо предложенного способа состоит в следующем.
При решении задачи определения текущих координат ТС, движущегося по известной траектории, по зашумленным показаниям навигационной системы (НС) любого типа, точность позиционирования ТС можно существенно повысить путем точного трехмерного проецирования его координат, определенных по измерениям НС, на истинную пространственную траекторию движения ТС. С этой целью на основании картографической информации (например, электронной карты) известная траектория движения ТС разбивается до начала движения на участки, аппроксимируемые с заданной точностью кратчайшими отрезками траектории между точками разбиения (т.н. ортодромическими отрезками).
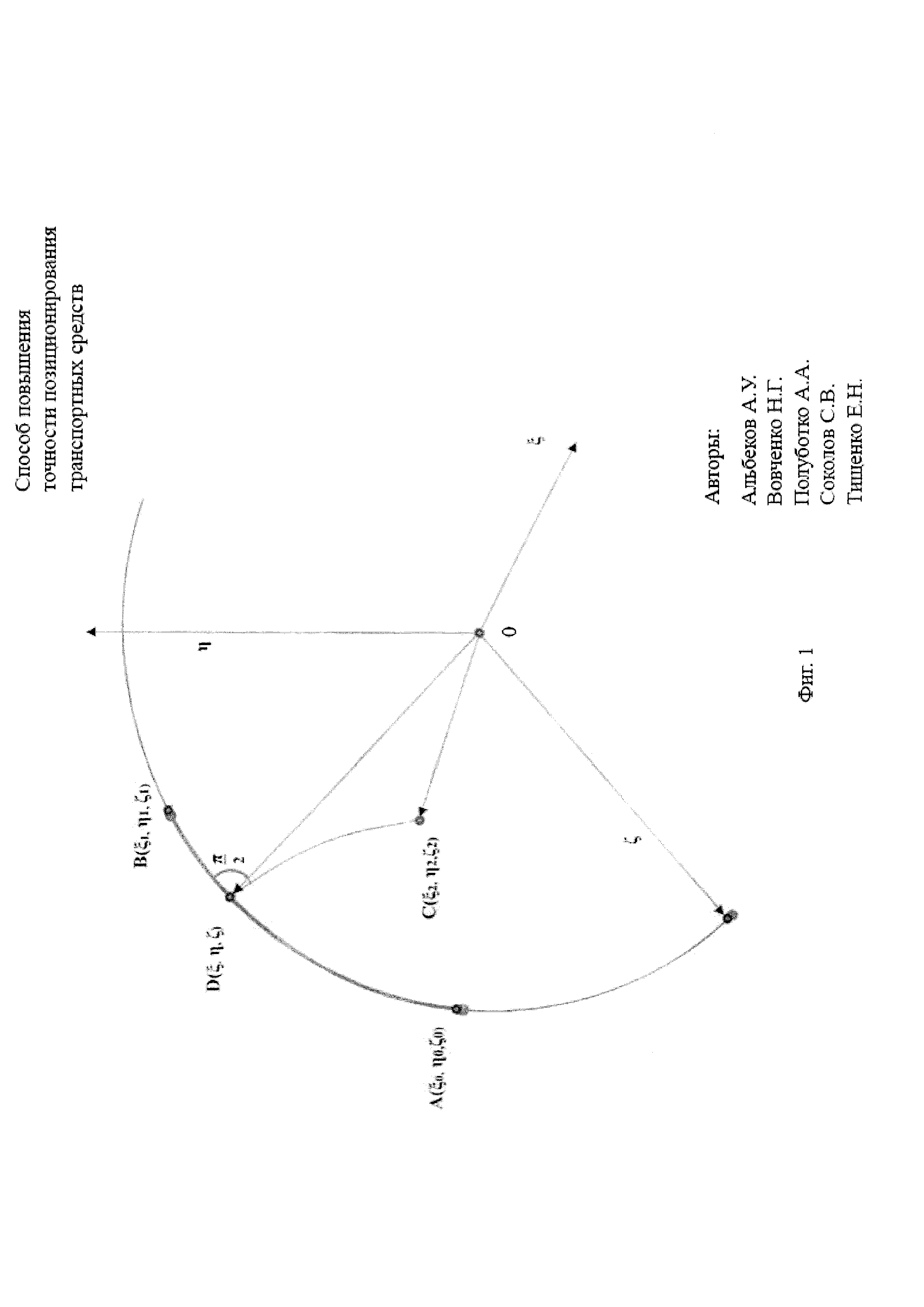
Это позволяет решить задачу трехмерного проецирования координат ТС как задачу определения геоцентрических координат ξ, η, ζ точки пересечения D кратчайшей линии (ортодромии), проведенной на сфере Земли из точки текущего местоположения ТС С с координатами ξ2, η2, ζ2, определенной по измерениям НС, с ортодромическим траекторным отрезком АВ, аппроксимирующим текущий интервал траектории его движения (фиг. 1). Зависимость длины ортодромии CD (точнее, косинуса длины ортодромии CD) от геоцентрических координат определяется из выражения скалярного произведения векторов ОС ξ2, η2, ζ2 и OD ξ, η, ζ:

где r - радиус Земли.
Данное выражение позволяет решить задачу проецирования координат ТС, определенных по измерениям НС, как задачу минимизации длины дуги CD за счет выбора соответствующих геоцентрических координат. Учитывая, что r2=const, далее вместо полученного выражения косинуса длины ортодромии CD рассматриваем минимизацию только функции ψ=ξξ2+ηη2+ζζ2.
Используя известную связь между геоцентрическими (гринвичскими) координатами на ортодромической траектории, позволяющую выразить две координаты ξ, ξ через третью координату η [Соколов С.В. Синтез аналитических моделей пространственных траекторий и их применение для решения задач спутниковой навигации // Прикладная физика и математика, Т. 1. вып. 2. 2013. С. 3-12]:

где 



ξ0, η0, ζ0 - геоцентрические координаты начальной точки ортодромического отрезка,
ξ1, η1, ζ1 - геоцентрические координаты конечной точки ортодромического отрезка,
приведем функцию ψ к функции одной переменной:

A1=cosP0⋅P⋅ξ2+η2+sinP0⋅P⋅ζ2, A2=a0(ζ2 cosP0-ξ2 sinP0).
Для определения значения переменной η*, обеспечивающего минимальное значение ψ - т.е. минимальную длину ортодромии CD, продифференцируем ψ по η:

и приравняем к нулю:

Решая полученное иррациональное уравнение относительно искомого значения η*, имеем:

где знак координаты η* выбирается из условия - η0≤η*≤η1.
Остальные координаты ξ, ξ точки D вычисляются по соотношениям (1), определяя, тем самым, координаты ТС на его истинной траектории движения, максимально близкие к координатам, определенным по зашумленным показаниям навигационной системы.
Предложенный способ позиционирования транспортных средств позволяет существенно повысить точность определения текущих координат ТС за счет исключения ошибок измерения, приводящих к отклонению от истинной траектории движения ТС (т.е. приводящих к позиционированию ТС вне истинной траектории).
Способ позиционирования транспортных средств, заключающийся в том, что до начала движения транспортного средства (ТС) на основании картографической информации известная траектория движения ТС разбивается на участки, аппроксимируемые с заданной точностью ортодромическими отрезками, на которых существует функциональная связь между геоцентрическими координатами, позволяющая выразить две координаты через третью, а при движении ТС по известной траектории измеренные навигационной системой текущие геоцентрические координаты ТС проецируются на истинную ортодромическую траекторию движения ТС, при этом координаты точки проекции определяются с учетом связи между геоцентрическими координатами на ортодромии и решения иррационального уравнения относительно одной из координат, полученного из условия минимума длины ортодромического отрезка между точкой с измеренными координатами ТС и точкой проекции на истинную ортодромическую траекторию его движения, координаты которой принимаются за истинные текущие геоцентрические координаты ТС.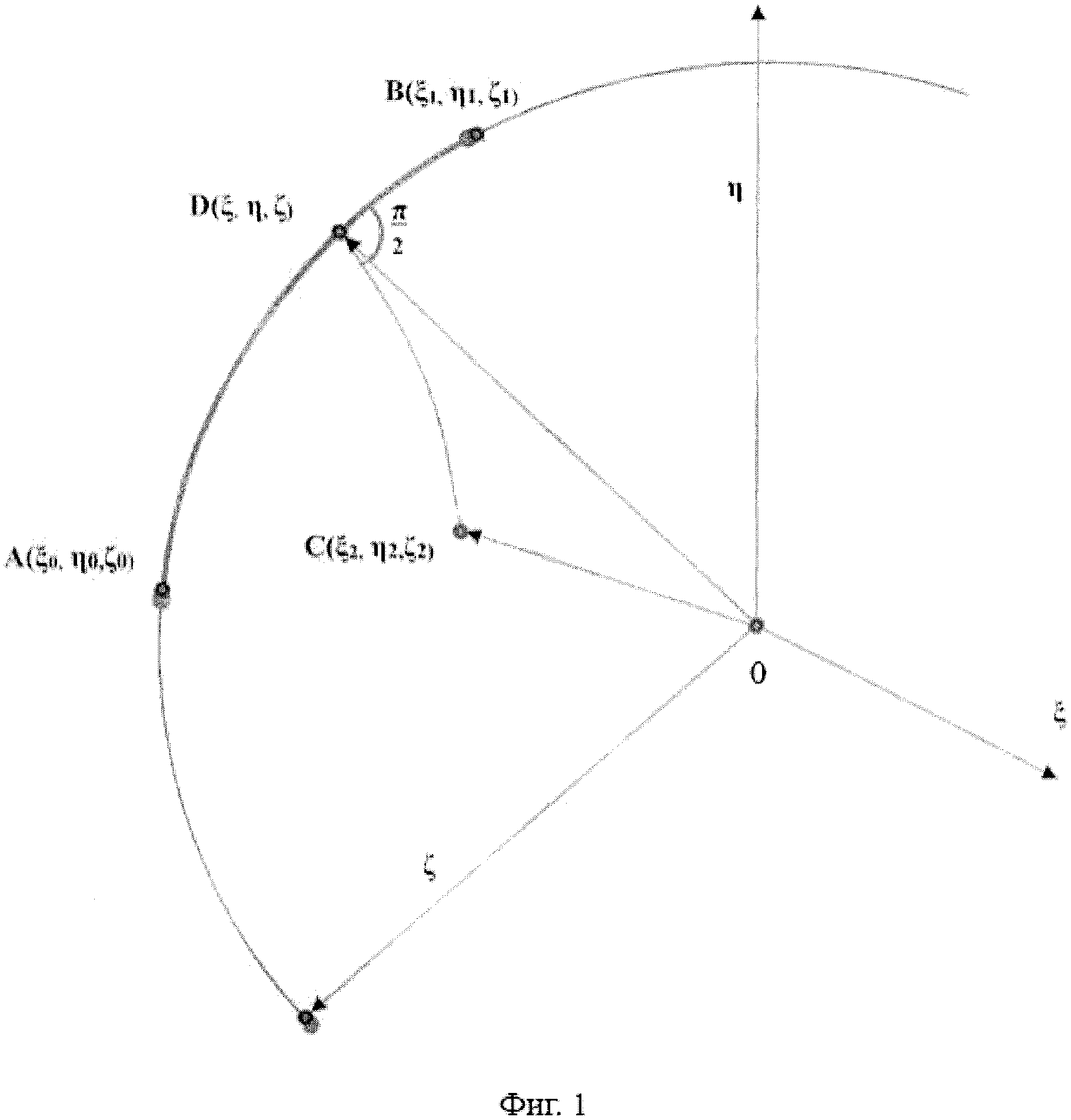
Акселерометр
Способ дистанционного мониторинга позиционирования транспортных средств
Оптический умножитель
Устройство для дискретной подачи семян
Устройство измерения линейной скорости транспортного средства
Оптический умножитель

