Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ КЛАПАНОМ
Вид РИД
Изобретение
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет согласно предварительной заявке на патент США № 61/975,085, поданной 4 апреля 2014 г.; содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к системам управления технологическими процессами, а более конкретно, к управлению клапаном.
УРОВЕНЬ ТЕХНИКИ
[0003] Системы управления технологическими процессами, такие как распределенные или наращиваемые системы управления технологическими процессами, подобные тем, что используются в химических, нефтеперерабатывающих и других технологических процессах, как правило, включают один или более контроллеров технологического процесса, соединенных с обеспечением связи по меньшей мере с одной главной рабочей станцией или рабочей станцией пользователя и с одним или более полевыми устройствами через аналоговые, цифровые или комбинированные аналоговые/цифровые шины. Полевые устройства, которые могут включать, например, регулирующие клапаны, устройства позиционирования клапанов, переключатели и передатчики (например, датчики температуры, давления и расхода) выполняют в технологическом процессе такие функции, как открывание или закрывание клапанов, и измерение параметров технологического процесса. Контроллер технологического процесса принимает сигналы, указывающие на результаты измерений технологического процесса, выполненных полевыми устройствами, и/или другую информацию, относящуюся к полевым устройствам, и использует эту информацию для выполнения стандартной программы управления с целью генерации управляющих сигналов, посылаемых по шинам к полевым устройствам для управления ходом технологического процесса. Информация от каждого из полевых устройств и контроллера, как правило, доступна для одной или более прикладных программ, выполняемых рабочей станцией пользователя, для того, чтобы разрешить оператору выполнить любую требуемую функцию, относящуюся к технологическому процессу, такую как просмотр текущего состояния технологического процесса и/или изменение хода технологического процесса. В случае отказа полевого устройства возможны нарушения эксплуатационного состояния всей системы управления технологическим процессом.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Один вариант осуществления настоящего изобретения относится к системе для управления полевым устройством, например, клапаном в процессе управления. Система содержит первое устройство позиционирования, имеющее эксплуатационное состояние и выполненное с возможностью приема первого управляющего сигнала на первом входе первого устройства позиционирования, при этом первое устройство позиционирования создает первый выходной сигнал на первом выходе первого устройства позиционирования в ответ на первый управляющий сигнал. Система, кроме того, содержит второе устройство позиционирования, выполненное с возможностью приема второго управляющего сигнала на первом входе второго устройства позиционирования, при этом второе устройство позиционирования создает второй выходной сигнал на первом выходе второго устройства позиционирования в ответ на второй управляющий сигнал. Система, кроме того, содержит переключатель, включающий в себя первый вход, соединенный с первым выходом первого устройства позиционирования и принимающий первый выходной сигнал, второй вход, соединенный с первым выходом второго устройства позиционирования и принимающий второй выходной сигнал, и третий вход, реагирующий на эксплуатационное состояние первого устройства позиционирования. Переключатель, кроме того, содержит выход, соединенный с полевым устройством, при этом переключатель позволяет первому выходному сигналу первого устройства позиционирования проходить к полевому устройству, если эксплуатационное состояние первого устройства позиционирования является работоспособным, и переключатель позволяет второму выходному сигналу второго устройства позиционирования проходить к полевому устройству, если эксплуатационное состояние первого устройства позиционирования является неработоспособным.
[0005] Другой вариант осуществления настоящего изобретения относится к способу управления полевым устройством в процессе управления. Способ включает в себя прием управляющего сигнала на первом устройстве позиционирования и втором устройстве позиционирования; создание первого выходного сигнала от первого устройства позиционирования в ответ на управляющий сигнал; создание второго выходного сигнала от второго устройства позиционирования в ответ на управляющий сигнал; мониторинг работы первого устройства позиционирования; определение того, работоспособно ли первое устройство позиционирования; автоматическое обеспечение возможности доступа первого выходного сигнала к полевому устройству, если первое устройство позиционирования работоспособно; и автоматическое обеспечение возможности доступа второго выходного сигнала к полевому устройству, если первое устройство позиционирования неработоспособно.
[0006] Следующий вариант осуществления настоящего изобретения относится к способу управления полевым устройством в процессе управления. Способ включает в себя мониторинг эксплуатационного состояния полевого устройства; прием первого управляющего сигнала на первом устройстве позиционирования; прием второго управляющего сигнала на втором устройстве позиционирования; создание первого выходного сигнала от первого устройства позиционирования в ответ на первый управляющий сигнал; создание второго выходного сигнала от второго устройства позиционирования в ответ на второй управляющий сигнал; обеспечение возможности доступа первого выходного сигнала к полевому устройству; мониторинг эксплуатационного состояния первого устройства позиционирования; обнаружение отказа, связанного с эксплуатационным состоянием первого устройства позиционирования; автоматическое лишение возможности доступа первого выходного сигнала к полевому устройству и обеспечение возможности доступа второго выходного сигнала к полевому устройству.
[0007] Еще один вариант осуществления настоящего изобретения относится к материальному машиночитаемому носителю, хранящему команды, которые при исполнении одним или большим количеством процессоров обуславливают вычислительную систему: принимать управляющий сигнал на первом устройстве позиционирования и втором устройстве позиционирования; создавать первый выходной сигнал от первого устройства позиционирования в ответ на управляющий сигнал; создавать второй выходной сигнал от второго устройства позиционирования в ответ на управляющий сигнал; мониторить работу первого устройства позиционирования; определять, работоспособно ли первое устройство позиционирования; автоматически обеспечивать возможность доступа первого выходного сигнала к полевому устройству, если первое устройство позиционирования работоспособно, и автоматически обеспечивать возможность доступа второго выходного сигнала к полевому устройству, если первое устройство позиционирования неработоспособно.
[0008] Еще один вариант осуществления настоящего изобретения относится к материальному машиночитаемому носителю, хранящему команды, которые при исполнении одним или большим количеством процессоров обуславливают вычислительную систему: мониторить эксплуатационное состояние полевого устройства; принимать первый управляющий сигнал на первом устройстве позиционирования; принимать второй управляющий сигнал на втором устройстве позиционирования; создавать первый выходной сигнал от первого устройства позиционирования в ответ на первый управляющий сигнал; создавать второй выходной сигнал от второго устройства позиционирования в ответ на второй управляющий сигнал; обеспечивать возможность доступа первого выходного сигнала к полевому устройству; мониторить эксплуатационное состояние первого устройства позиционирования; обнаруживать отказ, связанный с эксплуатационным состоянием первого устройства позиционирования; автоматически лишать возможности доступа первого выходного сигнала к полевому устройству и обеспечивать возможность доступа второго выходного сигнала к полевому устройству.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
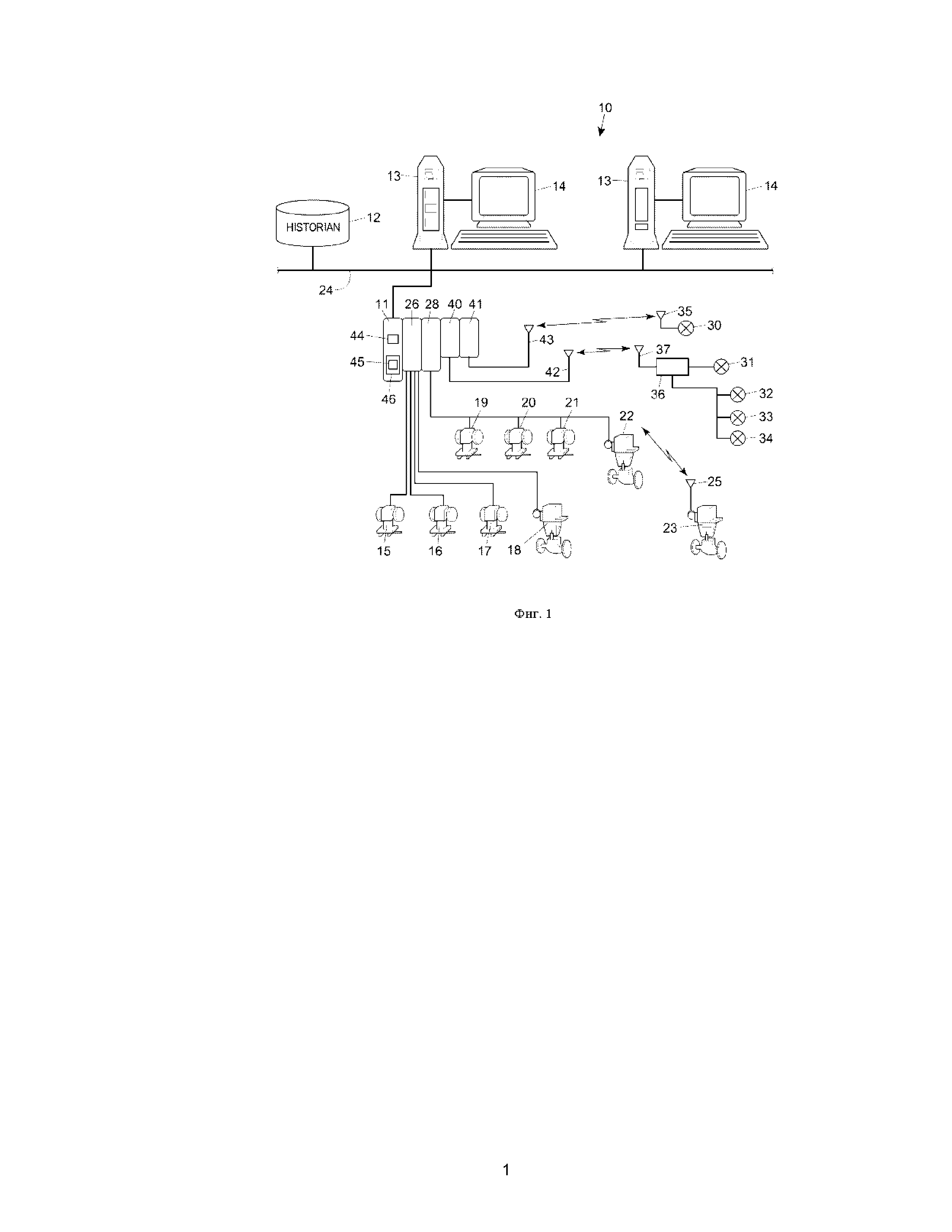
[0009] На фиг. 1 приведено схематическое изображение примера системы управления технологическим процессом, имеющей одно или больше полевых устройств, выполненных в соответствии с принципами настоящего изобретения.
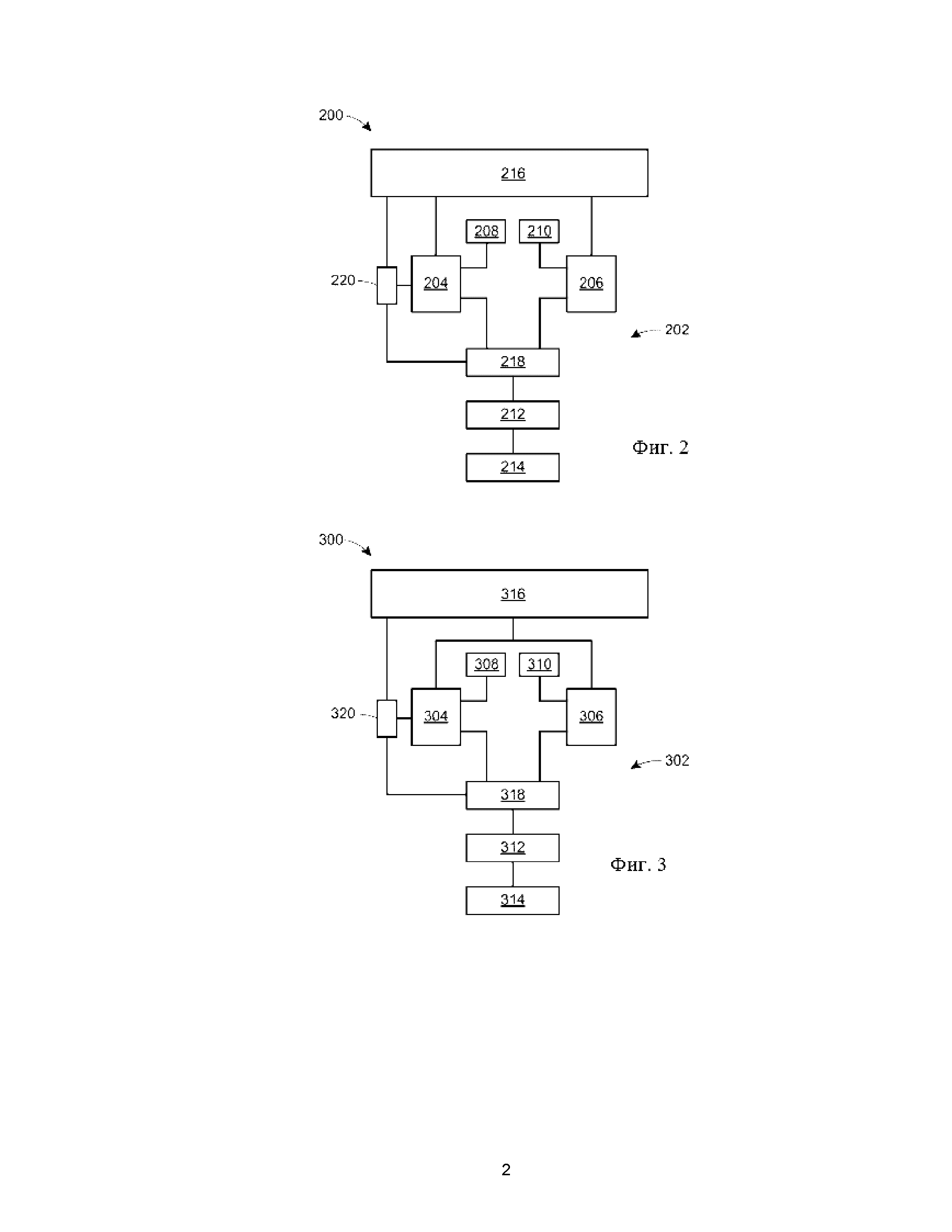
[0010] На фиг. 2 приведено схематическое изображение примера узла регулирующего клапана, выполненного в соответствии с принципами настоящего изобретения.
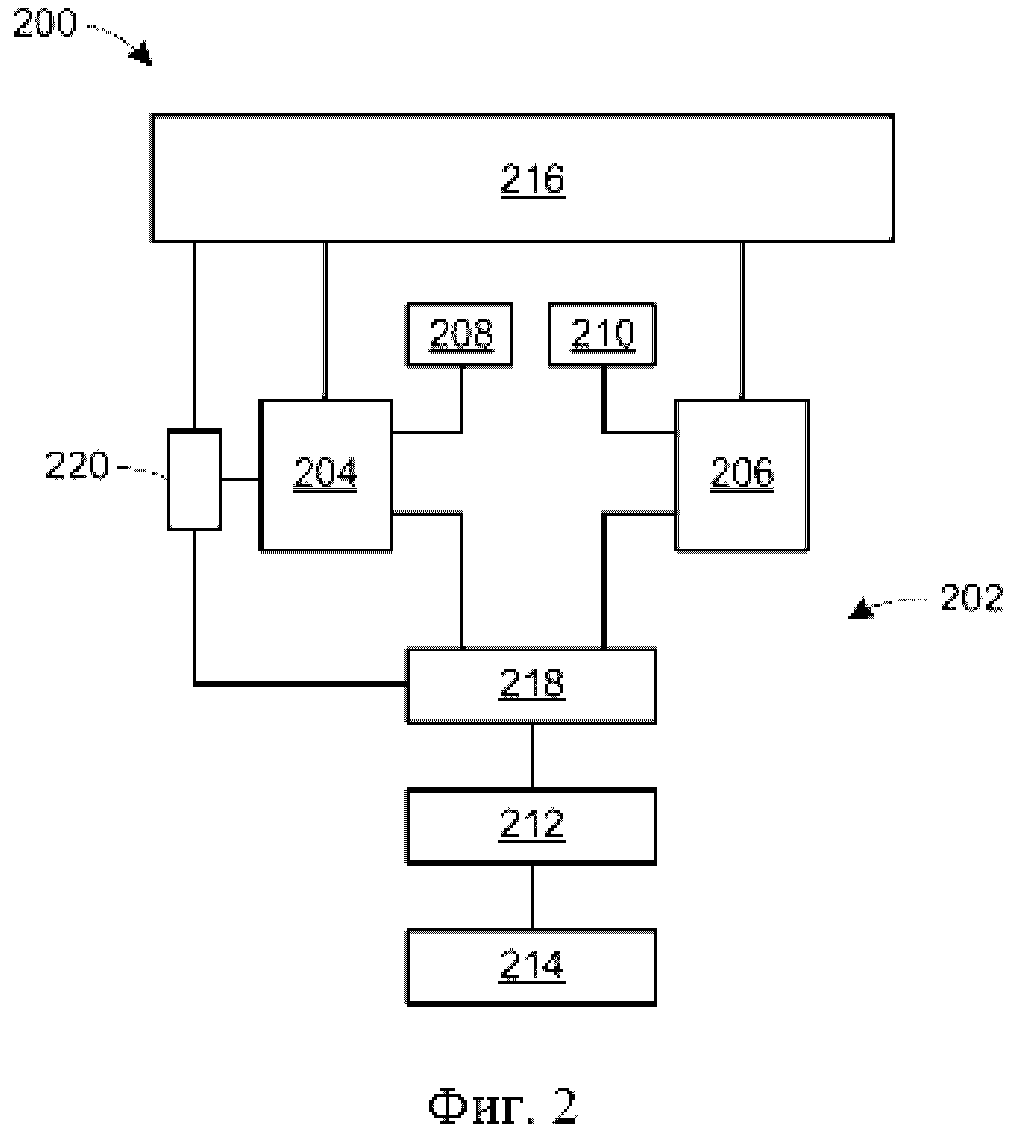
[0011] На фиг. 3 приведено схематическое изображение другого примера узла регулирующего клапана, выполненного в соответствии с принципами описания настоящего изобретения.
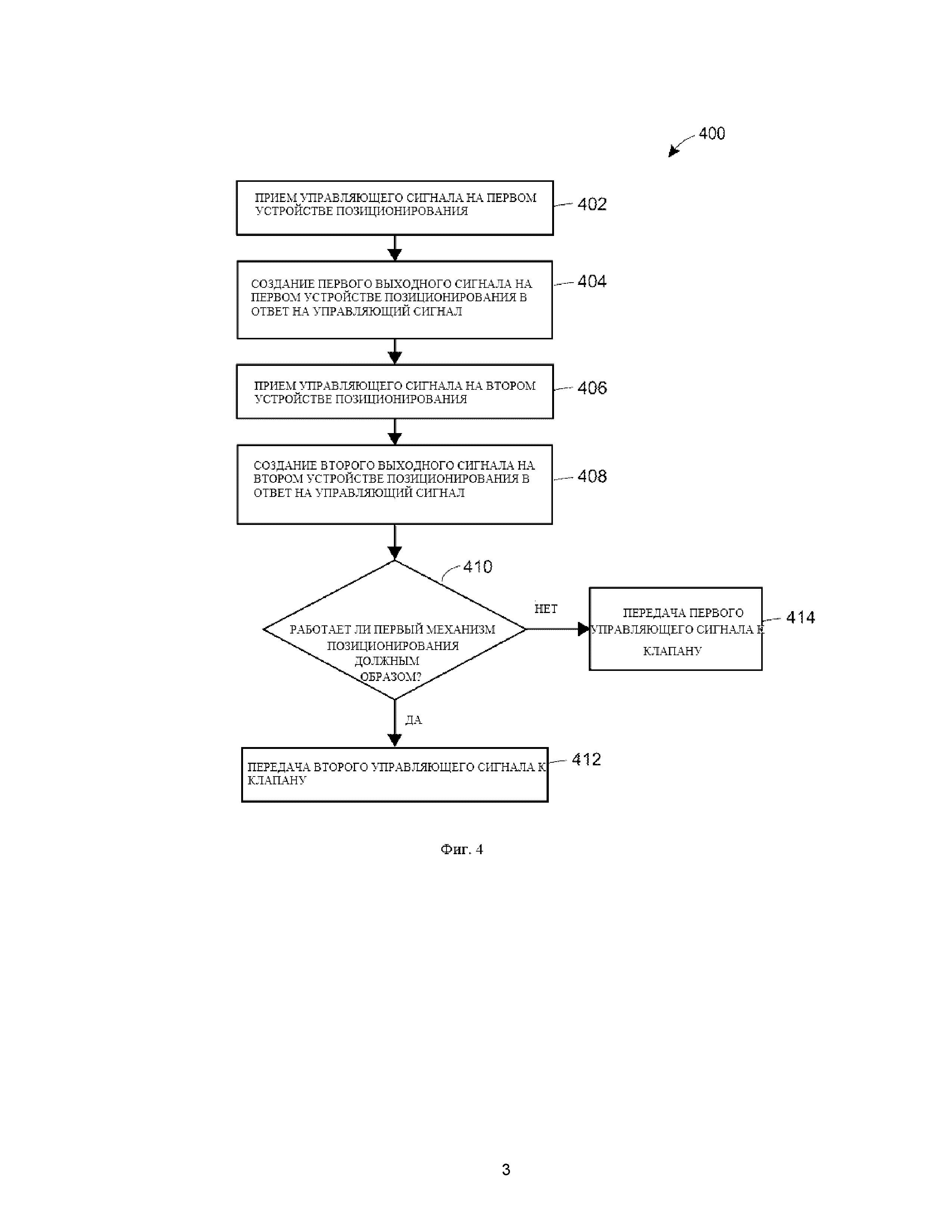
[0012] На фиг. 4 приведена схема последовательности примера способа для регулирующего клапана в соответствии с принципами настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0013] Далее со ссылками на фиг. 1 изображена система 10 управления технологическим процессом, созданная в соответствии с одним вариантом настоящего изобретения, включающая в себя одно или больше полевых устройств 15, 16, 17, 18, 19, 20, 21, 22, 23, поддерживающих связь с контроллером 11 технологического процесса. Контроллер 11 технологического процесса связан с обеспечением связи с архивом 12 данных и одной или больше рабочих станций 13 пользователя. Каждая рабочая станция 13 содержит пользовательский интерфейс 14, облегчающий обмен данными с системой 10 управления технологическим процессом. Пользовательский интерфейс 14 может содержать одно или большее количество устройств, таких, как дисплей, сенсорный экран, клавиатура, и мышь. В такой конфигурации контроллер 11 подает сигналы к полевым устройствам 15, 16, 17, 18, 19, 20, 21, 22, 23, а также от рабочих станций 13, и принимает сигналы от них для дальнейшего управления системой управления технологическим процессом.
[0014] В более подробном рассмотрении контроллер 11 технологического процесса системы 10 управления технологическим процессом в варианте исполнения, показанном на фиг. 1, соединен через аппаратную систему связи с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22 с помощью плат ввода/вывода (input/output (I/O)) 26 и 28. Архивом данных 12 может являться устройство сбора данных любого требуемого типа, содержащее память любого требуемого типа и программное обеспечение, аппаратные средства или программно-аппаратные средства любого известного или требуемого типа для хранения данных. Более того, хотя архив 12 данных изображен на фиг. 1 в виде отдельного устройства, он может вместо этого или в дополнение к этому являться частью одной из рабочих станций 13 или другого вычислительного устройства, например, сервера. Контроллер 11, которым может являться, например, контроллер DeltaVTM, продаваемый компанией Emerson Process Management, соединен в режиме обмена данными с рабочими станциями 13 и архивом 12 данных через коммуникационную сеть 24, например, путем подключения к сети Интернет или Ethernet.
[0015] Полевые устройства 15, 16, 17, 18, 19, 20, 21, 22 показаны связанными с контроллером 11 в режиме обмена данными по схеме аппаратно зафиксированных соединений, которая может включать в себя использование любых требуемых программных, аппаратных и/или программно-аппаратных средств для осуществления передачи по аппаратно зафиксированным каналам, например, передачи по стандартному каналу 4-20 мА и/или любой передачи с использованием любого интеллектуального протокола передачи, такого как FOUNDATION® Fieldbus, HART® и др. Полевыми устройствами 15, 16, 17, 18, 19, 20, 21, 22 могут являться устройства любых типов, такие, как датчики, узлы регулирующих клапанов, передатчики, устройства позиционирования; при этом платами ввода/вывода 26 и 28 могут являться устройства ввода/вывода любых типов, соответствующие любому требуемому протоколу связи или протоколу контроллера. В варианте осуществления, показанном на фиг. 1, полевыми устройствами 15, 16, 17, 18 являются устройства стандарта 4-20 мА, осуществляющие связь по аналоговым каналам с платой ввода/вывода 26; при этом цифровыми полевыми устройствами 19, 20, 21, 22 могут являться интеллектуальные устройства, например, коммуникационные устройства HART® и полевые устройства Fieldbus, осуществляющие связь по цифровой шине к плате ввода/вывода 28 согласно протоколу передачи Fieldbus. Естественно, полевые устройства 15, 16, 17, 18, 19, 20, 21, 22 могут соответствовать любому другому требуемому стандарту (стандартам) или протоколам, в том числе, любым стандартам или протоколам, разработанным в будущем.
[0016] Система 10 управления технологическим процессом, изображенная на фиг. 1, содержит также ряд полевых устройств 23, 30, 31, 32, 33, 34 беспроводной связи, установленных на контролируемой и /или управляемой промышленной установке. В качестве полевого устройства 23 показан узел регулирующего клапана, содержащий, например, регулирующий клапан; при этом в качестве полевых устройств 30, 31, 32, 33, 34 изображены передатчики, например, датчики переменных значений параметров процесса. Беспроводная связь может быть установлена между контроллером 11 и полевыми устройствами 23, 30, 31, 32, 33, 34 с использованием любого требуемого оборудования беспроводной связи, включая аппаратные, программные, аппаратно-программные средства или любое их сочетание, известное в настоящем или разработанное в будущем. В варианте, показанном на фиг. 1, антенна 25 соединена с узлом 23 регулирующего клапана, чтобы обеспечить беспроводную связь для узла 23 регулирующего клапана. Аналогично, антенна 35 соединена с передатчиком 30 и предназначена упростить для него беспроводную связь, в то время как маршрутизатор беспроводной связи или другой модуль 36, имеющий антенну 37, соединен с передатчиками 31, 32, 33, 34 для обеспечения им скоординированной коллективной беспроводной связи. Полевые устройства 23, 30, 31, 32, 33, 34, 36 или соответствующие им аппаратные средства могут выполнять операции стека протоколов, используемые соответствующим протоколом беспроводной связи, для приема, декодирования, маршрутизации, кодирования и отправки сигналов беспроводной связи через антенны 25, 35, 37 для осуществления беспроводной связи между контроллером 11 технологического процесса и узлом 23 регулирующего клапана, и передатчиками 30, 31, 32, 33, 34.
[0017] В случае необходимости узел 23 регулирующего клапана может в качестве части своей работы выдавать результаты измерений, выполненных датчиками внутри узла 23 регулирующего клапана, или другие данные, сформированные или вычисленные узлом 23 регулирующего клапана, контроллеру 11. Конечно, узел 23 регулирующего клапана может также известным способом получать управляющие сигналы от контроллера 11, чтобы влиять на физические параметры, например, на расход потока внутри технологического процесса в целом. Кроме того, передатчики 30, 31, 32, 33, 34 могут образовывать единственный канал связи между различными датчиками (передатчиками) технологического процесса и контроллером 11 технологического процесса, и в этом качестве служат основой для отправки точно выверенных сигналов к контроллеру 11 для обеспечения бесперебойного хода технологического процесса. Передатчики 30, 31, 32, 33, 34, часто именуемые передатчиками значений переменных параметров технологического процесса (PVT), могут играть заметную роль в координировании процесса управления в целом.
[0018] Контроллер 11 технологического процесса функционально связан с одним или большим количеством устройств ввода/вывода 40, 41, каждое из которых соединено с соответствующей антенной 42, 43, причем устройства ввода/вывода и антенны действуют в качестве передатчиков/приемников для осуществления беспроводной связи с полевыми устройствами 23, 30, 31, 32, 33, 34 беспроводной связи через одну или большее количество сетей беспроводной связи. Для беспроводной связи с полевыми устройствами 23, 30, 31, 32, 33, 34 можно использовать один или большее количество известных протоколов беспроводной передачи, таких, как протокол WirelessHART® протокол Ember, протокол WiFi, IEEE-стандарт беспроводной связи и др. Более того, устройства ввода/вывода 40, 41 могут реализовывать стековые операции протоколов, используемые этими протоколами связи для получения, декодирования, маршрутизации, кодирования и отправки беспроводных сигналов посредством антенн 42, 43 для реализации беспроводной связи между контроллером 11 и узлом регулирующего клапана 23 и передатчиками 30, 31, 32, 33, 34.
[0019] Как показано на фиг. 1, контроллер 11 обычно содержит процессор 44, который реализует одну или большее количество стандартных программ 45 диагностики и/или управления технологическим процессом (или любой модуль, блок или подпрограмму такой программы), хранящихся в памяти 46, или контролирует их выполнение. Стандартные программы 45 диагностики и/или управления технологическим процессом, хранящиеся в памяти 46, могут включать в себя циклы управления, реализуемые в рамках работы промышленной установки, или могут быть связаны с ними. В целом и в пределах хорошо известных сведений контроллер 11 технологического процесса выполняет одну или большее количество стандартных управляющих программ 45 и взаимодействует с полевыми устройствами 15, 16, 17, 18, 19, 20, 21, 22, 23, 30, 31, 32, 33, 34, пользовательскими рабочими станциями 13 и архивом 12 данных для управления технологическим процессом в любой требуемой форме.
[0020] На характеристики полевых устройств, используемых в системе управления, может влиять несколько факторов. Для регулирующего клапана, например, неблагоприятные эксплуатационные условия и/или продолжительный цикл обслуживания могут неблагоприятно влиять на характеристики одного или больше компонентов клапана, что, в конечном итоге, может влиять на работоспособность клапанов в системе управления. Например, устройство позиционирования клапана, работающего в жестких и неблагоприятных условиях, может залипать, проскальзывать, испытывать смещение, и т. п., вследствие экстремальных погодных условий. Плохо работающий клапан не может быть использован в процессе управления.
[0021] Один вариант осуществления настоящего изобретения, показанный на фиг. 2, относится к увеличению работоспособности узла 202 регулирующего клапана, используемого в системе 200 управления. Пара устройств 204, 206 позиционирования расположена в конфигурации с высокой работоспособностью, и по отдельности соединена с контроллером 216 и процессором (не показан). Каждое устройство 204, 206 позиционирования содержит вход, соединенный с источником сигнала (208, 210, соответственно) для управления клапаном 214. Каждое устройство 204, 206 позиционирования может быть по отдельности соединено с отдельным источником сигнала, как показано на фиг. 2, или оба устройства 204, 206 позиционирования могут быть соединены с одним источником сигнала, как показано на фиг. 3. В зависимости от типа контроллера источник сигнала 204, 206, используемый узлом 202 регулирующего клапана, может быть пневматическим, гидравлическим или электрическим. В данном примере варианта осуществления источник сигнала для управления регулирующим клапаном 214 является пневматическим, и вход каждого устройства 204, 206 позиционирования соединен с отдельным источником давления воздуха.
[0022] Управляющие сигналы, отправленные от контроллера 216 для управления клапаном 214, принимаются каждым устройством 204, 206 позиционирования, и отдельно преобразуются как соответствующий выходной сигнал, способный взаимодействовать с приводом 212, для позиционирования клапана 214. Каждое устройство 204, 206 позиционирования содержит выход, соединенный с отдельным входом переключателя 218. Переключатель 218 может быть многопозиционным (например, трехпозиционным) соленоидным переключателем. Выход переключателя 218 соединен со входом устройства 212 привода, который соединен с контроллером 214.
[0023] Пара устройств 204, 206 позиционирования и переключатель 218 выполнены с возможностью того, чтобы одно из устройств позиционирования, например, первичное устройство позиционирования, было реализовано как устройство позиционирования по умолчанию, и главным образом, использовался контроллером 216 для позиционирования клапана 214. Другое устройство позиционирования, например, вторичное устройство позиционирования, поддерживает или дублирует первичное устройство позиционирования, в то же время вторичное устройство позиционирования будет использовано для позиционирования клапана 214, если первичное устройство 204 позиционирования будет рассматриваться как до некоторой степени неработоспособным.
[0024] Более конкретно, система 200 управления мониторит работу первого устройства 204 позиционирования, при этом переключатель 218, в содействии с датчиком 220, адаптирован и выполнен с возможностью обеспечения пропуска одного из выходных сигналов устройств 204, 206 позиционирования через привод 212, в зависимости от работоспособности первого устройства 204 позиционирования. В общем, если первое устройство 204 позиционирования работает должным образом, переключатель 218 позиционируется, чтобы позволить пропускание выходного сигнала, полученного от первого устройства 204 позиционирования, через привод 212, и позиционировать регулирующий клапан 214 соответствующим образом. С другой стороны, если первое устройство 204 позиционирования не работает должным образом до некоторой степени, переключатель позиционируется, чтобы позволить пропускание выходного сигнала, полученного от второго устройства 206 позиционирования, через привод 212, и позиционировать регулирующий клапан 214 соответствующим образом.
[0025] Определение того, работает ли первое устройство 204 позиционирования должным образом, может быть облегчено путем мониторинга одной или более эксплуатационных характеристик первого устройства 204 позиционирования. Мониторируемые эксплуатационные характеристики могут включать, например, режимы отказов устройства позиционирования, такие как: отказ электрооборудования, отказ устройства обратной связи перемещения, отказ преобразователя, отказ пневматического реле и т. п.
[0026] В системе 200 управления, показанной на фиг. 2, датчик 220 является переключателем контура, объединенным и/или соединенным с переключателем 218. Датчик 220 реагирует на одну или больше эксплуатационных характеристик первого устройства 204 позиционирования, причем обнаруживаемый режим (режимы) отказа, связанный с первым устройством 204 позиционирования может приводить к тому, что переключатель 218 позиционируется, чтобы обеспечить передачу выходного сигнала от второго устройства 206 позиционирования через привода 212. В альтернативной конфигурации эксплуатационная характеристика (характеристики), измеряемые датчиком 220, может быть отправлена к контроллеру 216 и может сравниваться процессором (не показано) с пороговым значением соответствующей эксплуатационной характеристики. Затем контроллер 216 может отправлять или не отправлять управляющий сигнал к переключателю 218, чтобы сохранять или изменять положение переключателя в зависимости от определения контроллером работоспособности первого устройства позиционирования.
[0027] Другой вариант осуществления настоящего изобретения, относящийся к увеличению работоспособности узла регулирующего клапана, используемого в системе управления, показан на фиг. 3. Система 300 управления на фиг. 3 очень похожа на систему управления, изображенную на фиг. 2, за исключением того, что управляющий сигнал, отправляемый к обоим устройствам 304, 306 позиционирования, передается от того же выходного порта контроллера 316. На фиг. 3, пара устройств 304, 306 позиционирования расположена в конфигурации с высокой работоспособностью, и по отдельности соединена с контроллером 316 и процессором (не показан). Каждое устройство 304, 306 позиционирования содержит вход, соединенный с источником сигнала (308, 310, соответственно) для управления клапаном 314. В зависимости от типа контроллера источник сигнала 304, 306, используемый узлом 302 регулирующего клапана, может быть пневматическим, гидравлическим или электрическим. В данном примере варианта осуществления источник сигнала для управления регулирующим клапаном 314 является пневматическим, и вход каждого устройства 304, 306 позиционирования соединен с отдельным источником давления воздуха.
[0028] Управляющие сигналы, отправленные от контроллера 316 для управления клапаном 314, принимаются каждым устройством 304, 306 позиционирования, и отдельно преобразуются как соответствующий выходной сигнал, способный взаимодействовать с приводом 312, для позиционирования клапана 314. Каждое устройство 304, 306 позиционирования содержит выход, соединенный с отдельным входом переключателя 318. Переключатель 318 может быть многопозиционным (например, трехпозиционным) соленоидным переключателем, и выход переключателя 318 соединен с входом устройства 312 привода, который соединен с контроллером 314.
[0029] Пара устройств 304, 306 позиционирования и переключатель 318 выполнены с возможностью того, чтобы одно из устройств позиционирования было реализовано как первичное устройство позиционирования и, главным образом, использовался контроллером 316 для позиционирования клапана 314. Другое устройство позиционирования реализовано как вторичное устройство позиционирования и поддерживает или дублирует первичное устройство позиционирования, в то же время вторичное устройство позиционирования будет использовано для позиционирования клапана 314, если первичное устройство 304 позиционирования будет рассматриваться как до некоторой степени неработоспособное.
[0030] Более конкретно, система 300 управления мониторит работу первого устройства 304 позиционирования, при этом переключатель 318, в содействии с датчиком 320, адаптирован и выполнен с возможностью обеспечения пропуска одного из выходных сигналов устройств 304, 306 позиционирования через привод 312, в зависимости от работоспособности первого устройства 304 позиционирования. В общем, если первое устройство 304 позиционирования работает должным образом, переключатель 318 позиционируется, чтобы позволить пропускание выходного сигнала, полученного от первого устройства 304 позиционирования, через привод 312, и позиционировать регулирующий клапан 314 соответствующим образом. С другой стороны, если первое устройство 304 позиционирования не работает должным образом до некоторой степени, переключатель позиционируется, чтобы позволить пропускание выходного сигнала, полученного от второго устройства 306 позиционирования, через привод 312, и позиционировать регулирующий клапан 314 соответствующим образом.
[0031] Определение того, работает ли первое устройство 304 позиционирования должным образом, может быть облегчено путем мониторинга одной или больше эксплуатационных характеристик первого устройства 304 позиционирования. Мониторируемые эксплуатационные характеристики могут включать, например, режимы отказов устройства позиционирования, такие как: отказ электрооборудования, отказ устройства обратной связи перемещения, отказ преобразователя, отказ пневматического реле и т. п.
[0032] В системе 300 управления, показанной на фиг. 3, датчик 320 является переключателем контура, объединенным и/или соединенным с переключателем 318. Датчик 320 реагирует на одну или больше эксплуатационных характеристик первого устройства 304 позиционирования, причем обнаруживаемый режим (режимы) отказа, связанный с первым устройством 304 позиционирования может приводить к тому, что переключатель 318 позиционируется, чтобы обеспечить передачу выходного сигнала от второго устройства 306 позиционирования через привод 312. В альтернативной конфигурации эксплуатационная характеристика (характеристики), измеряемые датчиком 320, может быть отправлена к контроллеру 316 и может сравниваться процессором (не показано) с пороговым значением соответствующей эксплуатационной характеристики. Затем контроллер 316 может отправлять или не отправлять управляющий сигнал к переключателю 318, чтобы сохранять или изменять положение переключателя в зависимости от определения контроллером работоспособности первого устройства позиционирования.
[0033] Схема 400 последовательности примера способа управления регулирующим клапаном, которая может быть реализована в технологической системе, изображенной на фиг. 1, 2, или 3, показана на фиг. 4. Способ может быть интегрирован в модуль, сохраняемый в памяти, и может быть выполнен на процессоре контроллера. Управляющий сигнал для управления клапаном передается от контроллера к первому устройству позиционирования (этап 402). Первое устройство позиционирования получает управляющий сигнал и генерирует связанный с ним выходной сигнал к переключателю (этап 404). Например, первое устройство позиционирования может получать электрический токовый сигнал и преобразовывать электрический токовый сигнал в представительный сигнал давления воздуха для взаимодействия с пневматически управляемым устройством, таким как привод. Управляющий сигнал для управления клапаном также принимается вторым устройством позиционирования (этап 406). Второе устройство позиционирования получает управляющий сигнал и генерирует связанный с ним выходной сигнал к переключателю (этап 408). Например, подобно первому устройству позиционирования, второе устройство позиционирования может получать электрический токовый сигнал и преобразовывать электрический токовый сигнал в представительный сигнал давления воздуха для взаимодействия с пневматически управляемым устройством, таким как привод. Выполняется определение работоспособности первого устройства позиционирования (этап 410). Если первое устройство позиционирования действует должным образом, переключатель пропускает выходной сигнал, полученный от первого устройства позиционирования к приводу для позиционирования клапана соответствующим образом (этап 412). С другой стороны, если обнаружено, что первое устройство позиционирования не действует должным образом, переключатель пропускает выходной сигнал, полученный от второго устройства позиционирования, к приводу для позиционирования клапана соответствующим образом (этап 414).
[0034] Определение работоспособности первого устройства позиционирования может вовлекать датчик, соединенный с контроллером, при этом контроллер может анализировать информацию, полученную от датчика, в отношении приемлемых эксплуатационных характеристик, и определять, работает ли первое устройство позиционирования должным образом. Затем контроллер может отправлять соответствующий сигнал к переключателю, при этом переключатель будет реагировать соответственно, и позволять выходному сигналу от первого устройства позиционирования или второго устройства позиционирования проходить к регулирующему клапану. Альтернативно, датчик может содержать переключатель контура, обладающий возможностью приема информации от первого устройства позиционирования и определения того, работает ли первое устройство позиционирования должным образом. Например, датчик переключателя контура может содержать релейный переключатель и может быть выполнен с возможностью принимать информацию о режиме отказа, связанную с первым устройством позиционирования. На основании полученной информации о режиме отказа реле может автоматически инициировать изменение позиции переключателя, что позволит пропускать выходной сигнал либо от первого устройства позиционирования, либо от второго устройства позиционирования к регулирующему клапану.
[0035] Из приведенного выше описания очевидно, что работоспособность узла регулирующего клапана может быть эффективно продолжена благодаря объединению узла регулирующего клапана с парой устройств позиционирования, выполненных с возможностями, описанными в настоящем документе.
[0036] Хотя в настоящем документе раскрыты определенные варианты осуществления способов, устройств и изделий, объем защиты данного патента не ограничивается ими. Наоборот, данный патент охватывает все способы, устройства и изделия, явно подпадающие под объем защиты прилагаемой формулы, буквально или согласно доктрине эквивалентов.
[0037] В данном описании множественные примеры могут реализовать компоненты, операции или структуры, описанные как единичные примеры. Хотя индивидуальные операции одного или большего числа способов проиллюстрированы и описаны как отдельные операции, одна или большее число индивидуальных операций может выполняться одновременно, и никакие обстоятельства не требуют, чтобы операции выполнялись именно в проиллюстрированном порядке. Конструкции и функциональные средства, присутствующие как отдельные компоненты в иллюстративных конфигурациях, могут быть реализованы в виде комбинированной конструкции или компонента. Аналогично, конструкции и функции, представленные в виде отдельного компонента, могут быть выполнены в виде отдельных компонентов. Эти и другие варианты, модификации, добавления и усовершенствования находятся в пределах объема представленного здесь предмета изобретения.
[0038] Кроме того, определенные варианты осуществления описаны здесь, как включающие логические устройства либо ряд программ, подпрограмм, прикладных программ, или команд. Они могут образовывать как программные средства (например, код, реализованный на машиночитаемом носителе информации), так и аппаратные средства. В аппаратных средствах, программах и т. п. физические блоки способны выполнять определенные операции и могут быть определенным способом скомпонованы или размещены. В вариантах осуществления одна или больше вычислительных систем (например, автономная, клиентская или клиентская, или серверная вычислительная система) или один или больше аппаратных модулей вычислительной системы (например, процессор или группа процессоров) могут быть конфигурированы с помощью программного обеспечения (например, приложения или части приложения) как аппаратный модуль, который действует для выполнения определенных операций, как описано в настоящем документе.
[0039] В различных вариантах осуществления аппаратный модуль может быть выполнен в виде механического или электронного устройства. Например, аппаратный модуль может содержать специализированную электронную или логическую схему, сконфигурированную на постоянной основе (например, в виде специализированного процессора, такого, как программируемая пользователем вентильная матрица (FPGA) или заказная специализированная интегральная схема (ASIC)) для выполнения определенных операций. Аппаратный модуль может также содержать программируемый алгоритм или схему (например, находящуюся внутри процессора общего назначения или другого программируемого процессора), которую временно настраивают при помощи программного обеспечения для выполнения определенных операций. Следует понимать, что решение реализовать аппаратный модуль механически, в выделенной и сконфигурированной на постоянной основе схеме или во временно сконфигурированной схеме (например, сконфигурированной при помощи программного обеспечения), может быть обусловлено факторами затрат и времени.
[0040] Соответственно, термин "аппаратный модуль" следует понимать как охватывающий материальную единицу, будь то созданную физически, настроенную на длительное время (например, аппаратно-реализованную), либо временно настроенную (например, запрограммированную) для работы определенным образом или для выполнения определенных операций, описанных в контексте данного изобретения. С учетом вариантов реализации изобретения, в которых аппаратные модули временно настроены (например, запрограммированы), не обязательно, чтобы каждый из аппаратных модулей был настроен или подвергнут обработке в какой-либо момент времени. Например, когда аппаратные модули содержат процессор общего назначения, настроенный с помощью программного обеспечения, процессор общего назначения может быть настроен как соответствующие различные аппаратные модули в разные периоды времени. Программное обеспечение может соответственно настроить процессор, например, для того, чтобы создать конкретный аппаратный модуль в определенный момент времени и создать другой аппаратный модуль в другой момент времени.
[0041] Аппаратные модули могут предоставлять информацию другим аппаратным модулям и получать от них информацию. Соответственно, описанные аппаратные модули могут рассматриваться как подключенные через каналы передачи данных. Когда несколько таких аппаратных модулей существуют одновременно, связь может быть достигнута посредством передачи сигнала (например, через соответствующие схемы и шины), что соединяет аппаратные модули. В вариантах осуществления изобретения, в которых несколько аппаратных модулей настроены или подвергнуты обработке в разные моменты времени, связь между такими аппаратными модулями может быть достигнута, например, путем хранения и поиска информации в структурах памяти, к которым имеют доступ множественные аппаратные модули. Например, один аппаратный модуль может выполнить операцию и сохранить выходные данные этой операции в запоминающем устройстве, к которому он подключен через каналы передачи данных. Затем дополнительный аппаратный модуль может спустя некоторое время иметь доступ к запоминающему устройству для получения и обработки сохраненных выходных данных. Аппаратные модули могут также инициировать связь с устройствами ввода или вывода и могут работать на каком-либо ресурсе (например, сборе информации).
[0042] Различные операции типовых способов, описанных в контексте данного изобретения, могут быть выполнены, по меньшей мере частично одним или более процессорами, которые временно настроены (например, при помощи программного обеспечения) или настроены на длительное время для выполнения соответствующих операций. Независимо от того, настроены такие процессоры временно или на длительное время, они могут представлять собой реализуемые посредством процессора модули, работающие для выполнения одной или более операций или функций. Модули, указанные в контексте данного изобретения, в некоторых типовых вариантах реализации изобретения могут включать модули, реализуемые посредством процессора.
[0043] Аналогично, способы или программы, описанные в контексте данного изобретения, могут быть по меньшей мере частично реализованы посредством процессора. Например, по меньшей мере некоторые операции способа могут выполняться одним или более процессорами или модулями реализуемого посредством процессоров аппаратного обеспечения. Выполнение определенных операций может быть распределено между одним или большим числом процессоров, не только находящихся в одной машине, но и используемых на нескольких машинах. В некоторых типовых вариантах реализации изобретения процессор или процессоры могут находиться в одном месте (например, в домашней обстановке, офисе, мобильной платформе или в виде группы серверов), в то время как в других вариантах реализации изобретения процессоры могут быть распределены по нескольким местам.
[0044] Выполнение определенных операций может быть распределено между одним или большим числом процессоров, не только находящихся в одной машине, но и используемых на нескольких машинах. В некоторых иллюстративных вариантах осуществления изобретения один или более процессоров или модулей реализуемых посредством процессоров могут быть расположены в одном географическом местоположении (например, в домашней обстановке, офисе, мобильной платформе или в виде группы серверов). В других иллюстративных вариантах осуществления изобретения один или более процессоров или модулей реализуемых посредством процессоров могут быть распределены по нескольким географическим местоположениям.
[0045] Если специально не оговорено иное, обсуждение в настоящей заявке с использованием таких слов как "обработка", "вычисление", "расчет", "определение", "представление", "вывод на экран", "идентификация", "прогнозирование", "анализ" и тому подобное, может относиться к действиям или процессам в машине (например, компьютере), которая использует в своих целях или преобразовывает данные, представленные как физические (например, электронные, магнитные или оптические) величины внутри одного или большего числа запоминающих устройств (например, энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их сочетания), регистров или других узлов машины, которые получают, сохраняют, передают или выводят информацию на экран.
[0046] Стоит отметить, что любая ссылка на “один вариант осуществления изобретения“ или на “вариант осуществления изобретения“ означает, что конкретный признак, особенность, структура или характеристика, описанная в связи с вариантом осуществления изобретения, включены, по меньшей мере, в один вариант осуществления изобретения. Появление фразы ”в одном варианте осуществления изобретения“ в различных местах по всему описанию изобретения не обязательно предполагает ссылку на один и тот же вариант осуществления изобретения.
[0047] Некоторые варианты осуществления могут быть описаны с использованием выражений «соединенные» и «связанные» вместе со своими производными. Например, некоторые варианты осуществления изобретения могут быть описаны посредством термина “соединенные”, чтобы указать, что два или большее число элементов находятся в прямом физическом или электрическом контакте. Хотя термин “связан”, может также означать, что два или более элементов не находятся в прямом контакте друг с другом, но тем не менее по-прежнему действуют совместно или взаимодействуют друг с другом. В этом контексте варианты осуществления изобретения не ограничены.
[0048] Использованные здесь термины «содержит», «содержащий», «включает в себя», «включающий в себя», «имеет», «имеющий» или любые другие их варианты предназначены для охвата неисключительного включения. Например, процесс, способ, изделие или устройство, которое содержит перечень элементов, не обязательно ограничен только этими элементами, но может содержать другие элементы, не явно перечисленные или присущие такому процессу, способу, изделию или устройству. Кроме того, если явно не указано противоположное, «или» относится у включающему «или», а не к исключающему «или». Например, условие A или B удовлетворяется одним из следующих утверждений: А истинно (или присутствует), а В ложно (или не присутствует), А ложно (или не присутствует), а В истинно (или присутствует), и А и В вместе истинны (или присутствуют).
[0049] Кроме того, использование неопределенных артиклей “a” или “an” применяется для описания элементов и компонентов вариантов реализации изобретения в настоящей заявке. Это сделано для удобства и для придания описанию широкого смысла. В настоящем описании и последующей формуле изобретения следует понимать, что один или по меньшей мере один и единственное число также подразумевает множественное число, если только не очевидно, что такой термин означает иное.
[0050] Кроме того, только с иллюстративной целью на чертежах изображены предпочтительные варианты осуществления системы и способа связи для мобильной платформы. Из приведенного выше описания специалист в данной области техники без труда поймет, что альтернативные варианты реализации конструкций и способов, проиллюстрированных в данной заявке, могут быть использованы без отхода от основных положений, изложенных в данной заявке.
[0051] Разумеется, применения и преимущества систем, способов и методик, описанных в настоящей заявке, не ограничиваются только приведенными выше примерами. При использовании систем, способов и методик, описанных в настоящей заявке, возможны многие другие применения и преимущества.
[0052] Также должно быть понятно, что, если только термин не определен в явном виде в этом патенте с использованием предложения «Для целей настоящего изобретения термин «____», таким образом, определен как означающий...» или аналогичного предложения, здесь нет намерения ограничить значение такого термина, в явном виде или косвенно, вне его общепринятого или обычного значения, и такой термин не должен интерпретироваться как ограниченный по применению на основании любого утверждения сделанного в любом разделе настоящего патента (за исключением формулировки формулы изобретения). В той степени, в какой любой термин, содержащийся в формуле изобретения в конце этого патента, упоминается в этом патенте в смысле совместимом с единственным значением, это делается только с целью ясности изложения, так, чтобы не смутить читателя, и не подразумевается, что такой термин формулы изобретения будет ограничен, косвенно или иным способом, этим единственным значением. Наконец, если только элемент формулы изобретения не определяется упоминанием слова "означает" и функцией без описания любой структуры, то не подразумевается, объем притязаний любого элемента формулы изобретения будет интерпретироваться на основе заявки согласно разделу 35 Кодекса законов США, § 112(f) и/или предварительному Закону об изобретениях США Кодекса законов США, § 112, шестой пункт.
[0053] Кроме того, хотя приведенный ниже текст излагает подробное описание многочисленных различных вариантов реализации изобретения, следует понимать, что объем притязаний формулы изобретения определяется описанием формулы изобретения, изложенной в заключительной части этого патента. Подробное описание следует рассматривать только как иллюстративное, а не такое, которое описывает каждый возможный вариант реализации изобретения, поскольку описание каждого возможного варианта реализации изобретения было бы непрактичным или даже невозможным. Многочисленные альтернативные варианты реализации изобретения могут быть реализованы с применением либо современной технологии, либо технологии, разработанной после даты подачи данного патента, которая все еще попадает под объем формулы изобретения. В качестве примера, но не ограничения, описание изобретения в настоящей заявке подразумевает, по меньшей мере, следующие аспекты:
[0054] Аспект 1: Система для управления полевым устройством в процессе управления, содержащая первое устройство позиционирования, имеющее эксплуатационное состояние и выполненное с возможностью приема первого управляющего сигнала на первом входе первого устройства позиционирования, при этом первое устройство позиционирования создает первый выходной сигнал на первом выходе первого устройства позиционирования в ответ на первый управляющий сигнал; второе устройство позиционирования выполнено с возможностью приема второго управляющего сигнала на первом входе второго устройства позиционирования, второе устройство позиционирования создает второй выходной сигнал на первом выходе второго устройства позиционирования в ответ на второй управляющий сигнал; переключатель, включающий первый вход, соединенный с первым выходом первого устройства позиционирования и принимающий первый выходной сигнал, второй вход, соединенный с первым выходом второго устройства позиционирования и принимающий второй выходной сигнал, и третий вход, реагирующий на эксплуатационное состояние первого устройства позиционирования, переключатель, дополнительно включающий выход, соединенный с полевым устройством, при этом переключатель позволяет пропускать первый выходной сигнал первого устройства позиционирования к полевому устройству, если эксплуатационное состояние первого устройства позиционирования является работоспособным, и переключатель позволяет пропускать второй выходной сигнал второго устройства позиционирования к полевому устройству, если эксплуатационное состояние первого устройства позиционирования является неработоспособным.
[0055] Аспект 2: Система согласно аспекту 1, в которой полевым устройством является клапан.
[0056] Аспект 3: Система согласно любому из аспектов 1-2, дополнительно содержащая: контроллер, соединенный с первым устройством позиционирования и вторым устройством позиционирования, при этом первый управляющий сигнал и второй управляющий сигнал передаются от выхода контроллера.
[0057] Аспект 4: Система согласно любому из аспектов 1-3, дополнительно содержащая контроллер, соединенный с первым устройством позиционирования и вторым устройством позиционирования, при этом первый управляющий сигнал передается от первого выхода контроллера, а второй управляющий сигнал передается от второго выхода контроллера.
[0058] Аспект 5: Система согласно любому из аспектов 1-4, дополнительно содержащая датчик, соединенный с переключателем и обеспечивающий мониторинг эксплуатационного состояния первого устройства позиционирования.
[0059] Аспект 6: Система согласно аспекту 5, в которой датчик представляет собой переключатель контура, содержащий реле.
[0060] Аспект 7: Способ управления полевым устройством в процессе управления, включающий в себя прием управляющего сигнала на первом устройстве позиционирования и втором устройстве позиционирования; создание первого выходного сигнала от первого устройства позиционирования в ответ на управляющий сигнал; создание второго выходного сигнала от второго устройства позиционирования в ответ на управляющий сигнал; мониторинг работы первого устройства позиционирования; определение того, работоспособно ли первое устройство позиционирования; автоматическое обеспечение возможности доступа первого выходного сигнала к полевому устройству, если первое устройство позиционирования работоспособно; и автоматическое обеспечение возможности доступа второго выходного сигнала к полевому устройству, если первое устройство позиционирования неработоспособно.
[0061] Аспект 8: Способ управления полевым устройством в процессе управления, включающий в себя мониторинг эксплуатационного состояния полевого устройства; прием первого управляющего сигнала на первом устройстве позиционирования; прием второго управляющего сигнала на втором устройстве позиционирования; создание первого выходного сигнала от первого устройства позиционирования в ответ на первый управляющий сигнал; создание второго выходного сигнала от второго устройства позиционирования в ответ на второй управляющий сигнал; обеспечение возможности доступа первого выходного сигнала к полевому устройству; мониторинг эксплуатационного состояния первого устройства позиционирования; обнаружение отказа, связанного с эксплуатационным состоянием первого устройства позиционирования; автоматическое лишение возможности доступа первого выходного сигнала к полевому устройству и обеспечение возможности доступа второго выходного сигнала к полевому устройству.
[0062] Аспект 9: Материальный машиночитаемый носитель, хранящий команды, которые, при исполнении одним или большим количеством процессоров вычислительной системы, обуславливают вычислительную систему: принимать управляющий сигнал на первом устройстве позиционирования и втором устройстве позиционирования; создавать первый выходной сигнал от первого устройства позиционирования в ответ на управляющий сигнал; создавать второй выходной сигнал от второго устройства позиционирования в ответ на управляющий сигнал; мониторить работу первого устройства позиционирования; определять того, работоспособно ли первое устройство позиционирования, и автоматически обеспечивать возможность доступа первого выходного сигнала к полевому устройству, если первое устройство позиционирования работоспособно, и автоматически обеспечивать возможность доступа второго выходного сигнала к полевому устройству, если первое устройство позиционирования неработоспособно.
[0063] Аспект 10: Материальный машиночитаемый носитель, хранящий команды, которые, при исполнении одним или большим количеством процессоров вычислительной системы, обуславливают вычислительную систему: мониторить эксплуатационное состояние полевого устройства; приема первого управляющего сигнала на первом устройстве позиционирования; приема второго управляющего сигнала на втором устройстве позиционирования; создавать первый выходной сигнал от первого устройства позиционирования в ответ на первый управляющий сигнал; создавать второй выходной сигнал от второго устройства позиционирования в ответ на второй управляющий сигнал; обеспечивать возможность доступа первого выходного сигнала к полевому устройству; мониторить эксплуатационное состояние первого устройства позиционирования; обнаруживать отказ, связанный с эксплуатационным состоянием первого устройства позиционирования, и автоматически лишать возможности доступа первого выходного сигнала к полевому устройству, и обеспечивать возможность доступа второго выходного сигнала к полевому устройству.
Регулировочный винт, приводимый в действие различными инструментами
Металлическая уплотнительная прокладка с эластомерной подложкой для использования с регуляторами для текучей среды
Регулятор для текучей среды и дросселирующий элемент для такого регулятора
Двунаправленный преобразователь постоянного тока в постоянный для управления накопителем энергии при отводе энергии
Способ и устройство для выравнивания положения кольца седла в клапане
Способ и устройство для определения положения клапана
Приводное устройство с регулируемым расходом для использования с автоматическими запорными клапанами
Измерительная трубка для газового регулятора, имеющая функцию усреднения давления
Антенный блок для использования во взрывоопасной среде
Устройство для регулирования расхода текучей среды, имеющее фиксатор для кольца седла

