Результат интеллектуальной деятельности: Способ и система регулирования температуры и давления тензомостом
Вид РИД
Изобретение
Предполагаемые изобретения относится к измерительной технике, в частности к регулированию температуры и давления тензомостом.
Известен способ измерения температуры термометром сопротивления [а. с. №1332158], который приводят в контакт с объектом контроля. Подают на термометр сопротивления мощность Р1 и в момент времени t1 измеряют первое значение температуры θ1 и увеличивают мощность до величины Р2. В моменты времени Т2 и Т3 проводят второе и третье измерение температуры θ2 и θ3. Измерение температур организовано так, что Т2-Т1=Т3-Т2. Значение измеряемой температуры рассчитывается по формуле
Недостатками способа и термометра являются неопределенность условий и параметров, при которых проводится градуировка термометра сопротивления. При градуировке термометра сопротивления при различных величинах рассеиваемой мощности градуировочные характеристики получаются разными. Также большое влияние оказывают параметры теплообмена со средой, в которой проводится градуировка термометра сопротивления. Неучет этих факторов в процессе измерения температуры приводит к погрешности.
За прототип зондирования (измерения и преобразования) принят способ дистанционного измерения давления и температуры в скважине одним датчиком [см. патент РФ №2118802, G01K 7/16, G01L 1/22, Коловертнов Ю.Д. и др.], включающий подачу тока на диагональ питания тензомоста и измерение напряжения на измерительной диагонали. При смене направления тока питания тензомоста совмещают питающую и измерительную диагонали и измеряют второе напряжение, а значения давления и температуры определяют из соотношений:

Устройство для дистанционного измерения давления и температуры в скважине одним датчиком, содержащее тензомост, четырехпроводную линию связи, двухполярный источник тока, измерительно-вычислительное устройство, снабжено двумя развязывающими диодными цепочками, подключенными одними выводами через провода линии связи к двухполярному источнику тока, а другими двумя выводами параллельно тензорезисторам, включенным в противоположные плечи тензомоста.
Способ и устройство первого прототипа обладают существенными недостатками: невозможностью автоматизации в адаптивном диапазоне из-за ручного подбора коэффициентов статистической градуировки, снижающей точность и оперативность способа.
Прототипом регулирования (контроля и управления) служит способ автоматического управления системами [см. патент РФ №2571570, G05B 17/00, Коробов А.А. и др.], при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма за счет использования отрицательной обратной связи по выходной переменной управляемого объекта, отличающийся тем, что выходную переменную управляемого объекта в цифровом эквиваленте подают на вход блока контроллера, управляющий сигнал которого соответствует желаемым свойствам выходной переменной управляемого объекта, и его реализуют мультипликативно-симметричным критерием погрешности, выполняющим роль автоматического регулятора, который адаптируется по диапазону за счет оценки фактических величин входной и выходной переменных к нормированному эквиваленту их максимальных величин в каждый момент времени, и соответствующим квадрату отношения разности и суммы командной входной и выходной переменных управляемого объекта.
2. Система автоматического управления, содержащая контроллер, последовательно соединенный через исполнительный механизм с управляемым объектом, отличающаяся тем, что исполнительным механизмом служит цифроаналоговый преобразователь и дополнительно введен аналого-цифровой преобразователь, включенный между выходом управляемого объекта и входом контроллера, который состоит из задатчика командной величины, последовательно соединенных с ним сумматоров, выходы которых через делитель связаны с блоком возведения в степень, выход которого является выходом контроллера, входами которого являются вторые входы сумматоров, служащие для выходной переменной управляемого объекта.
Технической задачей предлагаемых решений является автоматизация способа регулирования как температуры так и давления тензозондом в адаптивном диапазоне за счет действительной оценки сигнала по программно управляемой нормируемой мере.
Поставленная задача достигается тем, что
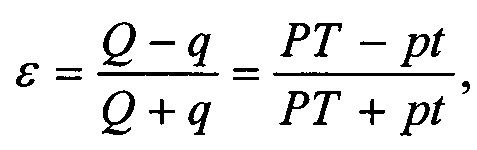
1. В способе регулирования температуры и давления тензомостом, включающем подачу тока на диагональ питания тензомоста и измерение напряжения на измерительной диагонали U+, при смене направления тока питания тензомоста измеряют напряжение U-. В отличие от прототипа, выходные переменные температуры t и давления р управляемого объекта в цифровых эквивалентах подают на вход контроллера, управляющий сигнал которого соответствует желаемым свойствам выходных переменных температуры Т и давления Р управляемого объекта, и его реализуют нормированной погрешностью ε:
выполняющей роль автоматического регулятора, который адаптируется по диапазонам и температуры и давления за счет оценки фактических величин входных Q и выходных q переменных температуры t и давления р к нормированным эквивалентам Т, Р их максимальных величин в каждый момент времени и соответствующим отношению разности и суммы произведений температуры Т и давления Р командной входной Q=РТ и выходной q=pt переменных управляемого объекта.
2. В системе регулирования температуры и давления тензомостом, содержащей контроллер, последовательно соединенный через исполнительный механизм с управляемым объектом тензозонда, исполнительным механизмом служит цифроаналоговый преобразователь и введен аналого-цифровой преобразователь, включенный между выходом тезозонда и входом контроллера, в отличие от прототипа, контроллер состоит из задатчика командной величины с дешифратором температуры и давления в напряжение, последовательно соединенных с ним умножителем и сумматором, выходы которого через делитель связаны с выходами контроллера, входами которого являются вторые входы второго умножителя, служащие для выходных переменных управляемого объекта, а второй умножитель через второй сумматор связан со вторыми входами делителя.
3. В системе по п. 2, в отличие от прототипа, тензозонд состоит из объекта управления, связанного с тензомостом, в диагонали которого включены источник тока и коммутатор каналов, соединенный с выходом тензозонда, входом которого служит управляемый объект.
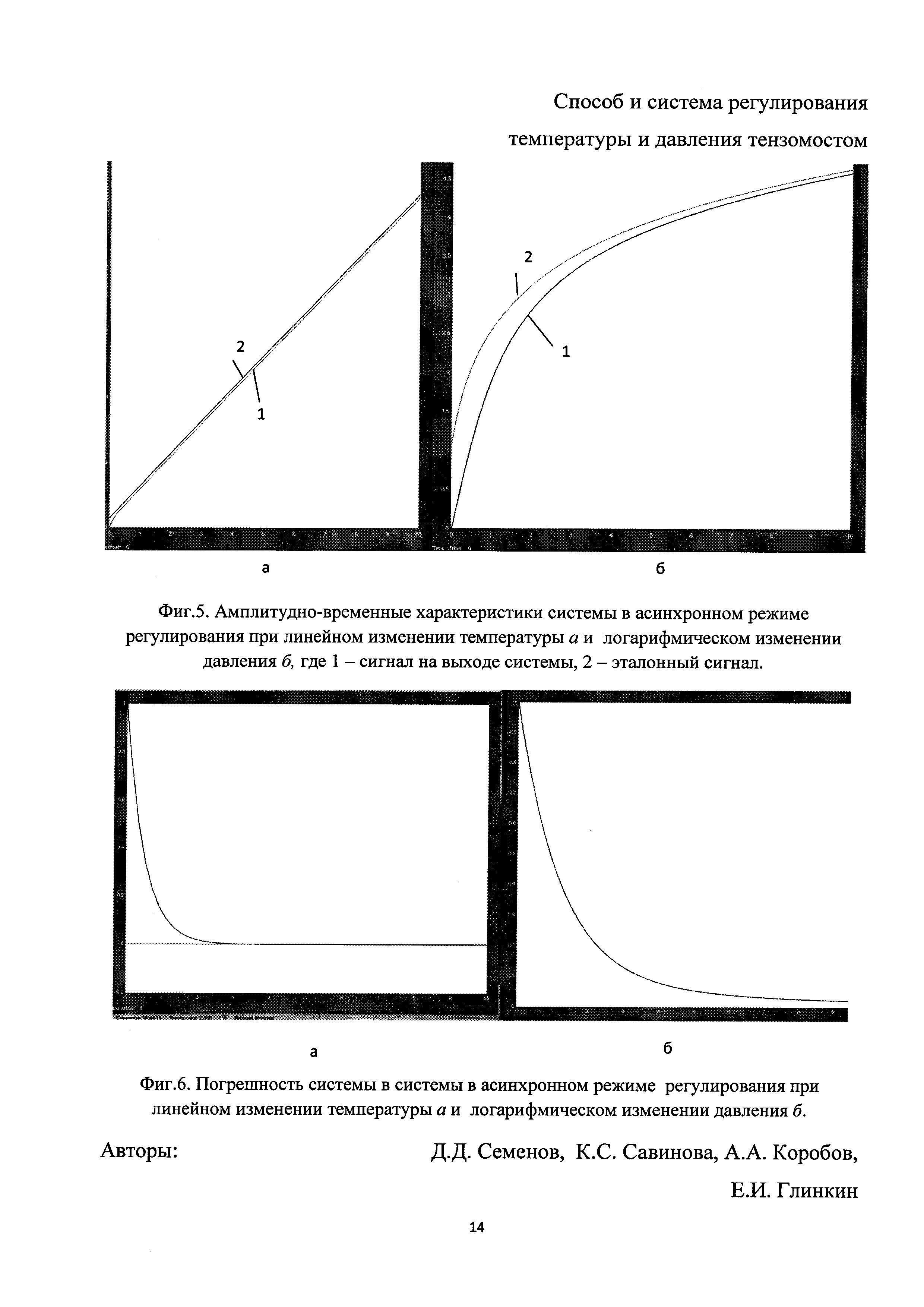
Сущность способа и системы поясняют фиг. 1 и фиг. 2, которые отражают структурные схемы системы (фиг. 1) и тензомоста (фиг. 2), зависимости амплитудно-временных динамических характеристик U, Р, Т и погрешности ε от вида управляющего воздействия показаны на фиг. 3-6.
В предлагаемом способе регулирования температуры t и давления р тензомостом желаемые значения температуры Т и давления Р управляемого объекта подают на вход исполнительного механизма. Выходную переменную ε(Q,q)=ε которого подают на вход управляемого объекта, измеряют фактическую величину q выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной Q управляемого объекта используют для формирования управляющего сигнала N(ε,Q). Его подают на вход исполнительного механизма, причем используют отрицательную обратную связь по выходной переменной q управляемого объекта. Для автоматического регулирования в адаптивном диапазоне выходную переменную q управляемого объекта в цифровом эквиваленте N(q) подают на вход контроллера, соединенный с задатчиком преобразования температуры и давления в напряжение, управляющий сигнал N(ε,Q) которого соответствует желаемым свойствам выходной переменной q управляемого объекта. В предлагаемом решении регулируют (измеряют и преобразуют, контролируют и управляют) давлением и температурой, поэтому выходная величина q=pt, а входная переменная Q=PT представлены произведениями для организации нормируемой погрешности регулирования.
Алгоритм вычисления управляющего сигнала N(ε,Q), выполняющего функцию автоматического регулятора оценивают по нормированной погрешности:

Способ осуществляется следующим образом.
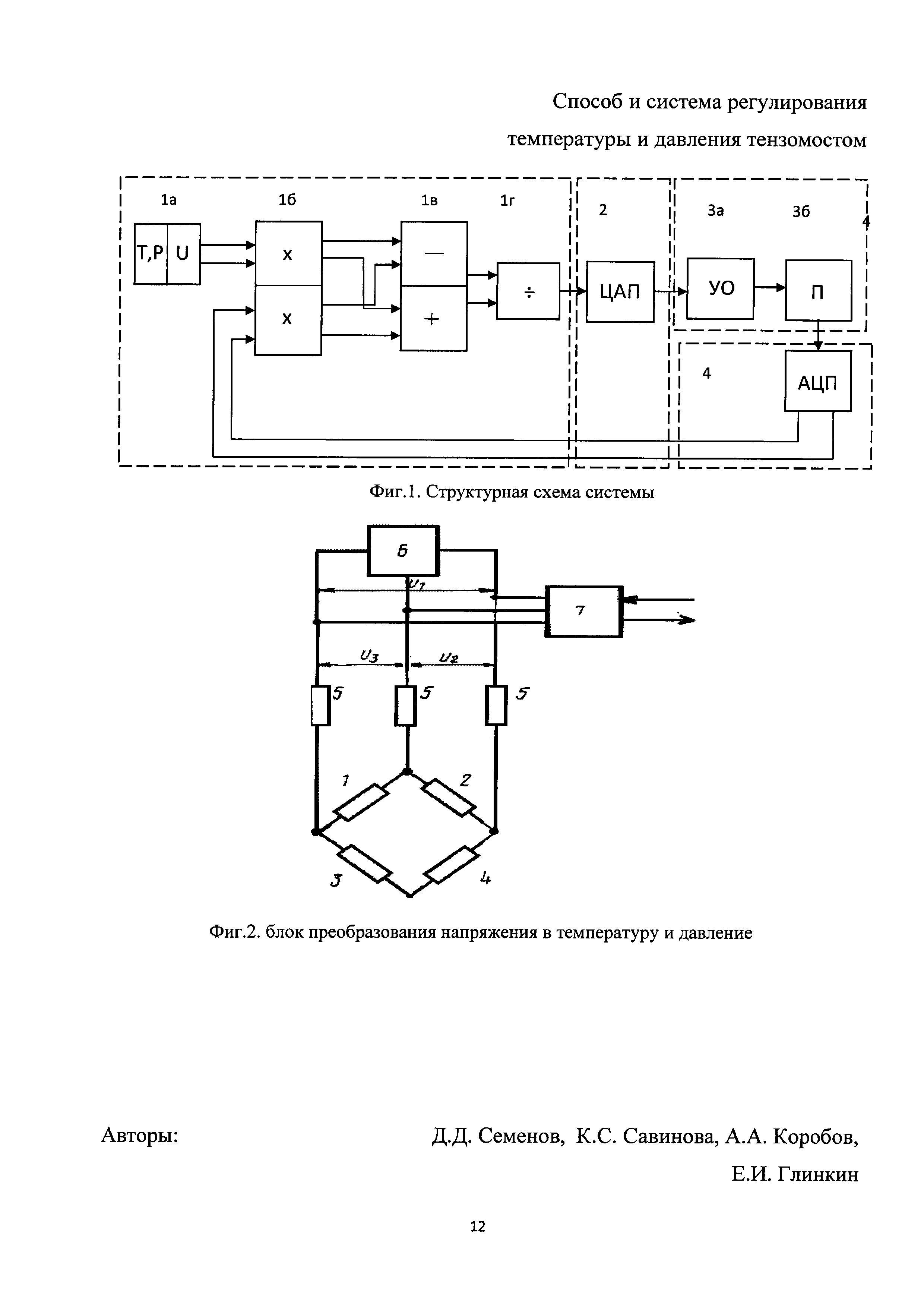
На фиг. 1 показана структурная схема системы регулирования температуры и давления тензозондом, содержащая контроллер 1, последовательно соединенный через исполнительный механизм 2 с управляемым объектом УО 3а тензозонда 3, включающего также тензомост 3б для измерения темпертуры t и давления р УО 3а. Исполнительным механизмом 2 служит цифро-аналоговый преобразователь (ЦАП) и введен аналого-цифровой преобразователь (АЦП) 4, включенный между выходом тензозонда 3 и входами контроллера 1. Контроллер 1 состоит из задатчика командной величины 1а с дешифратором температуры NT и давления NP в цифровые эквиваленты Р, Т. Последовательно с задатчиком 1a соединен умножитель 1б, формирующий произведение Q=РТ, выходы которого подключены к сумматорам 1в, которые присоединены к делителю 1г. Выходы делителя 1г являются выходами контроллера 1, реализующего нормированную погрешность ε. Входами контроллера 1 являются вторые входы второго умножителя 1б, служащие для выходных переменных Np, Nt управляемого объекта 3а тензозонда 3. По принципам аналогии второй умножитель 1б вычисляет произведение q=pt, второй сумматор 1в формирует действительный эквивалент в виде суммы S=Q+q, а первый сумматор 1в регистрирует рассогласование желаемого произведения к измеренному как разницу δ=Q-q. Делитель 1г в виде отношения нормирует приращение δ произведений к максимальному эквиваленту суммы S произведений для реализации нормированной погрешности ε=δ/S, выполняющей роль автоматического регулятора, адаптируемого по диапазонам температуры и давления.
На структурной схеме (фиг. 1) системы желаемые температуры NT и давления NP подают на входы задатчика 1а для преобразования в цифровые температуры Т и давления Р на выходе U задатчика 1а. Задатчиком 1а может служить, например, дешифратор, преобразующий цифровые эквиваленты температуры и давления в цифровые эквиваленты напряжения. После этого выходные величины с задатчика 1а подают на входы умножителей 1б. Измеряют тензозондом фактическую величину ОУЗ выходных переменных р и t преобразователя температуры и давления в напряжение 3б, которую вместе с величиной входных переменных Р и Т контроллера 1 подают на умножители 1б. Сигналы разницы PT-pt и суммы PT+pt подают на делитель 1г, которые используют для формирования управляющего сигнала ε (1). Управляющий сигнал ε(q,РТ) подают на вход исполнительного механизма - ЦАП 2. Сигнал с исполнительного механизма Р(ε,РТ) подается на управляемый объект 3а, а затем на преобразователь напряжения в температуру и давление 3б. Дополнительно используют отрицательную обратную связь по выходной переменной преобразователя 3б. Управляющее воздействие, соответствующее желаемым свойствам выходной переменной pt преобразователя напряжения 3б, реализуют отношением разности желаемого значения произведения параметров и измеренного произведения параметров объекта к их сумме (1). Блок 1 на фиг. 1 соответствует отношению разности и суммы входной и выходной переменных управляемого объекта pt и выполняет роль автоматического регулятора. Норированная погрешность ε адаптируется по диапазону за счет оценки фактических величин входной РТ и выходной переменной pt разницы PT-pt к нормированному эквиваленту их максимальных величин суммы PT+pt в каждый момент времени. Сигнал P(ε) с управляемого объекта 3а преобразуют в значение температуры и давления, цифровое значение которой с помощью АЦП 4 передают на умножители 1б.
Конкретное исполнение блоков может иметь следующие признаки (фиг. 1): блок 1 является контроллером, необходим для задания сигнала Q и задания функции  . Блок 2 представляет собой исполняющий механизм (в виде ЦАП) для преобразования ε в нормированный сигнал Р(ε). Тензозонд 3 включает тензомост 3б, который находится в контакте с управляемым объектом 3а. Сигналы измерения температуры и давления с выхода управляемого объекта УО 3а через тензомост 3б тензозонда 3 подаются на входы АЦП 4, с которого сигналы поступают на блок контроллера (1).
. Блок 2 представляет собой исполняющий механизм (в виде ЦАП) для преобразования ε в нормированный сигнал Р(ε). Тензозонд 3 включает тензомост 3б, который находится в контакте с управляемым объектом 3а. Сигналы измерения температуры и давления с выхода управляемого объекта УО 3а через тензомост 3б тензозонда 3 подаются на входы АЦП 4, с которого сигналы поступают на блок контроллера (1).
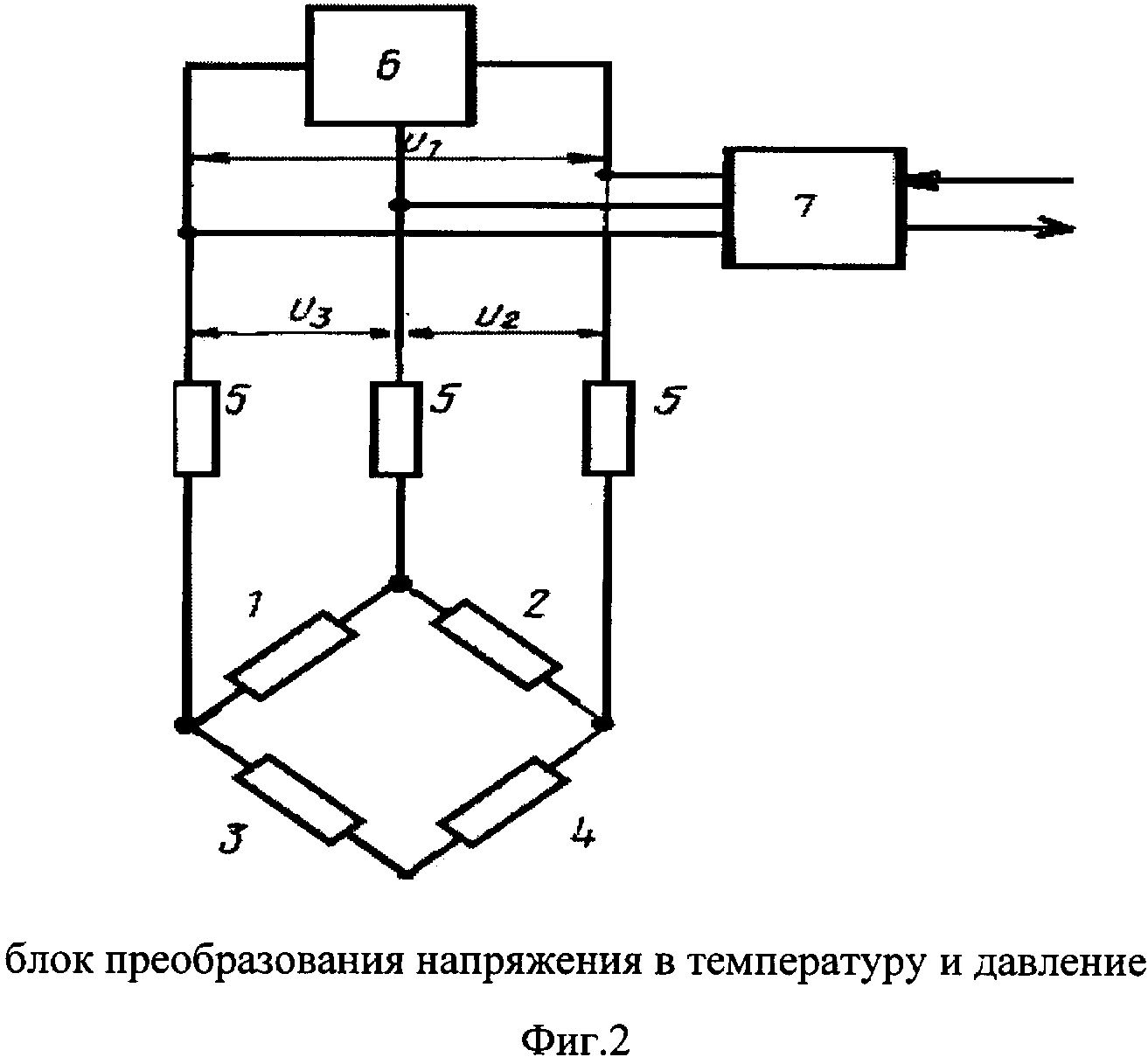
Тензозонд 3 представляет собой объект управления 3а и тензомост 3б для преобразования температуры и давления ОУ 3а в напряжение. Тензозонд 3 включает подачу тока на диагональ питания тензомоста 3б и измерение напряжения на измерительной диагонали. При смене направления тока питания тензомоста 3б совмещают питающую и измерительную диагонали и измеряют второе напряжение, а значения температуры t и давления р определяют из соотношений:

Тензозонд 3 (фиг. 2) служит для одновременного измерения с объекта управления За давления р и температуры t одним датчиком - тензомостом 3б с тензорезисторами 1-4, трехжильный кабель с активным сопротивлением каждой жилы 5. Тензозонд 3 имеет двуполярный источник тока 6 и коммутатор каналов 7.
Основными критериями оценки качества работы пропорционального регулирования являются погрешность и время выхода (оперативность) на установившееся значение динамической характеристики.
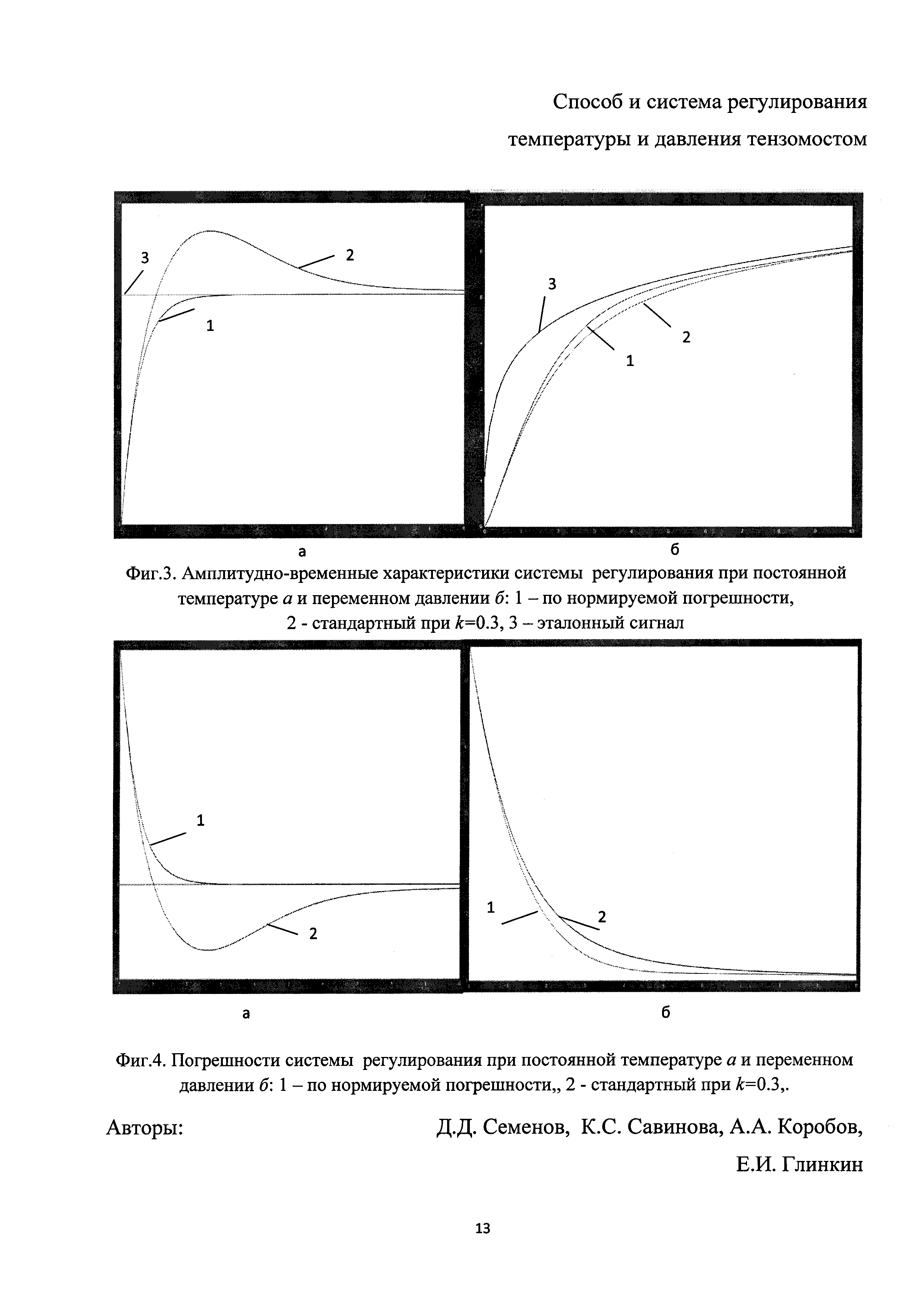
Результаты компьютерного моделирования зависимости амплитудно-временных динамических характеристик, представлены в табл. 1 и на фиг. 3:
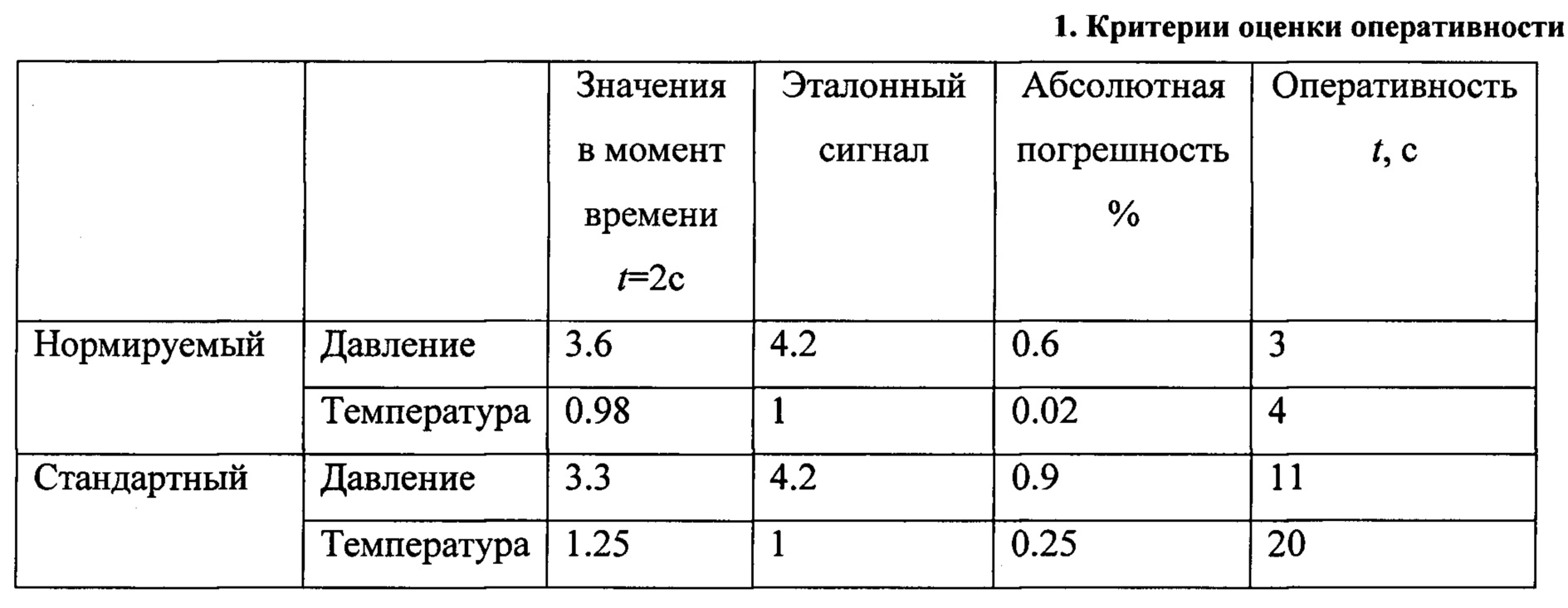
Количественный анализ табл. 1 показывают, что наибольшее соответствие эталону и быстродействие достигается регулированием по нормированной погрешности, которая меньше стандартного в 1.5 раз при измерении давления и в 13 раз меньше при измерении температуры.
Метрологические характеристики стандартного и нормируемого критериев представлены в табл. 2 и на фиг. 4.
Линейность фиг. 4 и 6, 8 оценивают по погрешности, которая определяется формулой:
где Fi - регулируемая функция, a Fэi - желаемый эквивалент Fэi (см. табл. 2).
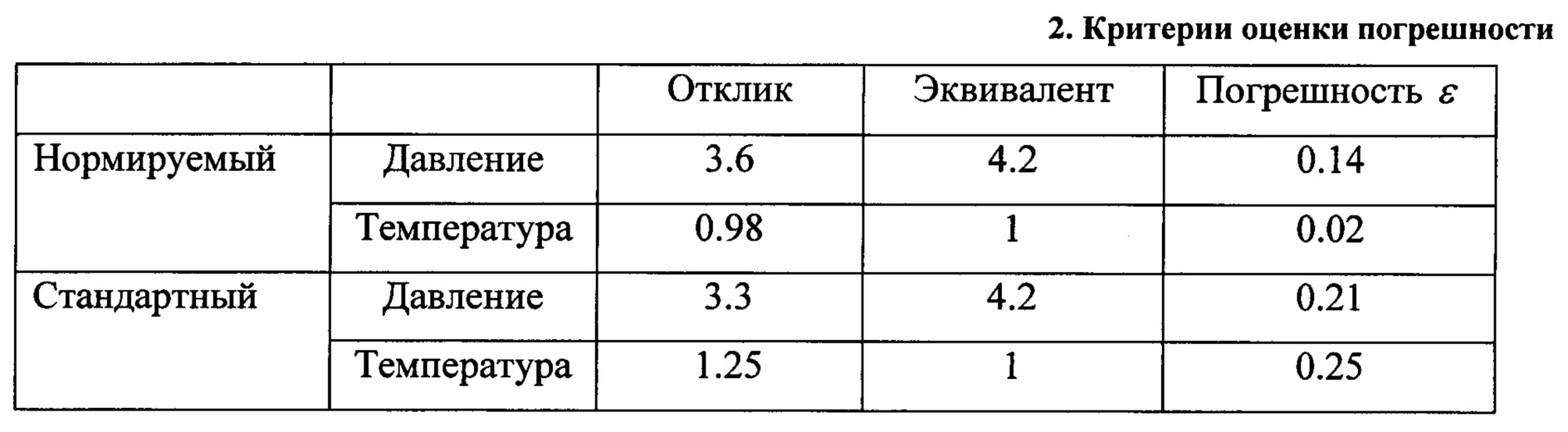
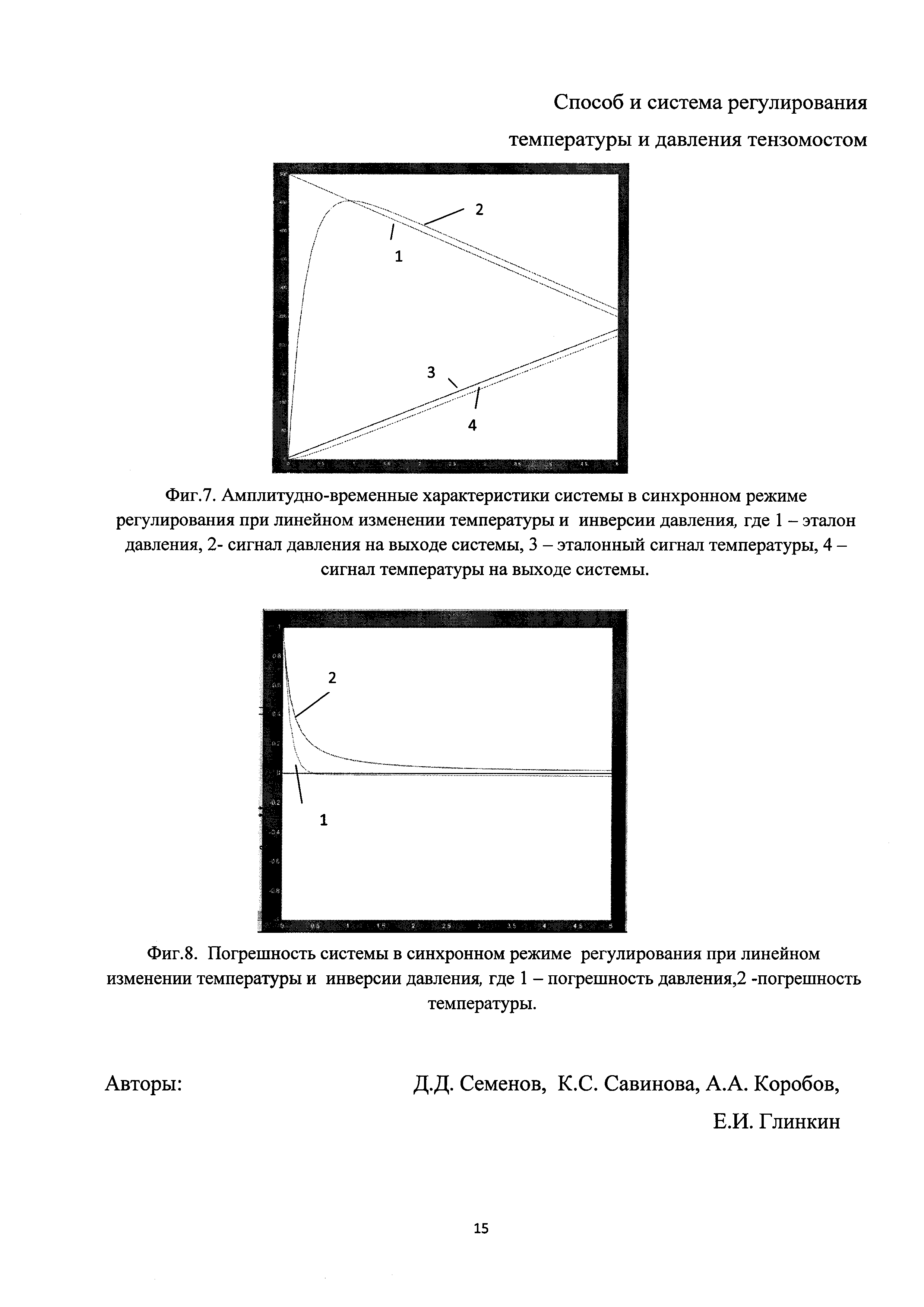
Данные таблицы 2 доказывают, что наивысшая точность достигается по нормируемой погрешности, которая ниже в 1.5 раза ниже при измерении давления и в 13 раз ниже при измерении температуры по сравнению с классическим способом. Режим асинхронного регулирования при линейном нарастанием температуры и при логарифмическом изменении давления показан на фиг. 5, а их погрешность на фиг. 6. Режим синхронного регулирования при линейном снижении давления и нарастании температуры показана на фиг 7., а погрешность на фиг. 8.
Таким образом, реализация управляющего сигнала нормированной погрешностью в виде отношения разности произведений желаемых значений давления и температуры и измеренных величин температуры и давления объекта к их сумме, выполняющим роль автоматического регулятора, в отличие от известных решений, снижает погрешность регулирования в 1.5 раза при регулировании давления и в 13 раз при регулировании температуры за счет увеличения линейности управления желаемым сигналом, что в итоге повышает метрологическую эффективность регулирования температуры и давления.
Измельчитель корнеклубнеплодов
Способ определения коэффициента диффузии растворителей в листовых капиллярно-пористых материалах
Поддон для изготовления ригеля с термовкладышами каркаса сборно-монолитного здания
Установка для сушки дисперсных растительных материалов в полидисперсном слое инертных тел
Гравитационный смеситель сыпучих материалов
Электробаромембранный аппарат трубчатого типа
Установка для сушки пастообразных материалов в закрученном взвешенном слое инертных тел
Способ изготовления маркёра горюче-смазочных материалов
Способ проверки при автоматической сортировке картофеля
Электробаромембранный аппарат трубчатого типа
Способ определения составляющих импеданса биообъекта
Способ определения функционального состояния системы гемостаза
Способ определения ударного объема сердца
Способ определения динамики изменения скорости оседания эритроцитов
Способ определения артериального давления
Способ определения артериального давления

