Результат интеллектуальной деятельности: Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации
Вид РИД
Изобретение
Изобретение относится к машиностроению и может быть использовано при конструировании подвесок транспортных средств.
Подвески транспортных средств, эксплуатируемых в условиях интенсивного динамического нагружения, используются для снижения уровня периодических возмущений, передаваемых от поверхности к корпусу устройства или его отдельным узлам. По существу, разработка подвески может быть отнесена к таким задачам динамики машин как виброзащита и виброизоляция. Вопросы вибрационной защиты технических объектов нашли отражение в работах [1-4]. В последние годы заметно возросло внимание к разработкам, в которых динамические свойства подвесок реализуются в зависимости от внешних условий, имеют системы поднастройки и использования внешних источников энергии. В большинстве случаев внимание уделяется кинематическим параметрам состояния, то есть вопросам снижения уровня ускорений, скоростей или динамических смещений, относимых к отдельным точкам технического объекта, параметры которых нормируются определенным образом. В меньшей степени внимание уделяется динамическим реакциям связей, то есть тем усилиям, которые возникают в точках контактов при взаимодействиях элементов подвески между собой, а также с корпусом объекта.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известна полезная модель [Васюков Е.С., Пономарев Ю.К., Ермаков А.И., Паровай Ф.В., Мелентьев B.C., Малов А.В., Гвоздев А.С., Тухвебер М.С. «Тросовый виброизолятор», патент №99563 U1, МПК F16F 7/14, приоритет 20.11.2010], содержащая тросовый виброизолятор, в виде двух, расположенных симметрично относительно амортизируемого объекта виброизоляторов, каждый из которых состоит из отрезка троса в форме змеевика, неподвижно закрепленного в двух планках, причем оба виброизолятора имеют общие крепежные обоймы, планки выполнены в виде регулировочных валиков, имеющих возможность осевого вращения, соединенные с крепежными обоймам через поддержки. Регулировочные валики, в зависимости от режима вибронагружения, могут поворачиваться на заданный угол с помощью торцевого ключа, затем фиксироваться стопорными шайбами.
Недостатками данного изобретения являются отсутствие возможности автоматического регулирования жесткости виброизолятора, а также невнимание к математическому описанию возможных динамических режимов работы.
Известен способ настройки режимов работы виброзащитной системы и устройство для его осуществления [Хоменко А.П., Елисеев С.В., Каимов Е.В., Большаков Р.С., Кинаш Н.Ж. «Способ настройки режимов работы виброзащитной системы и устройство для его осуществления», патент №2595733 С2, МПК F16F 15/04, F16F 7/08, B60N 2/54, приоритет 27.08.2016], включающий регулировку колебаний рычажной системы путем установки между объектом защиты и основанием пружины и шарнирно-рычажного механизма из двух звеньев, которые одним концом соединяют в центральном шарнире, к которому закрепляют дополнительную массу, фиксируют показания акселерометров, обеспечивая настройку режимов работы виброзащитной системы. Виброзащитное устройство для настройки режимов работы виброзащитной системы содержит пружину, дополнительную массу и систему рычагов. Рычажная система выполнена из двух рычагов со скользящими по ним ползунами. Одним концом рычаги соединены между собой в центральном шарнире и снабжены дополнительной массой. Верхний рычаг другим концом соединен с объектом защиты, а нижний рычаг другим концом соединен с основанием. На рычагах помещены акселерометры, соединенные с блоком управления, которые настраивают угол между рычагами, изменяя массу виброзащитной системы. Изобретение позволяет упростить настройку виброзащитной системы с помощью виброзащитного устройства без применения дополнительных источников энергии.
К недостаткам данного изобретения можно отнести сложность конструкции рычажного блока и отсутствие упругих элементов в его структуре, что может негативно сказаться на долговечности шарнирных соединений.
Также известно изобретение [Кочетов О.С., Стареева М.О. «Гидравлическая виброопора», патент №2503862 С2, МПК F16F 13/06, приоритет 10.01.2014], содержащее заполненные демпфирующей жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом. В корпусе закреплена разделительная перегородка, выполненная с кольцевой полостью и дроссельными каналами. Рабочая камера ограничена опорной платой с закрепленным на ней вытеснителем и эластичной обечайкой, а компенсационная - мембраной. В средней части разделительной перегородки выполнены каналы диффузорного типа. Вытеснитель выполнен в виде тела вращения, ограниченного верхней и нижней горизонтальными плоскостями. Перегородка имеет осевой канал, внутренняя поверхность которого выполнена конической с нарезанной на ней винтовой канавкой. Между поддоном и эластичной мембраной размещен упругий элемент, жесткость которого равна жесткости пневматической пружины, образованной воздушной полостью. Каждый из виброизоляторов выполнен в виде двух упругих колец, соединенных между собой двумя упругими диаметрально расположенными элементами со сквозным центральным пазом. Полости, образованные упругими кольцами, заполнены упругодемпфирующим сетчатым элементом, выполненным армированным из сетчатого каркаса, залитого эластомером, например полиуретаном. Достигается улучшение демпфирующих характеристик виброопоры.
Недостатками рассмотренного изобретения являются отсутствие математического моделирования возможных динамических режимов работы виброопоры и сложность конструкции.
В качестве прототипа выбирается устройство для гашения колебаний [Хоменко А.П., Елисеев С.В., Упырь Р.Ю. «Устройство для гашения колебаний», патент №84487 U1, МПК F16F 15/00, приоритет 10.07.2009], состоящее как минимум из двух пружин, причем каждая пружина одним концом закреплена на объекте защиты, другим концом соединена с основанием, отличающееся тем, что на одной из пружин размещена дополнительная масса, причем жесткость этой пружины зависит от частоты внешнего воздействия и определяется выражением:
где ω - частота внешнего воздействия, m1 - дополнительная масса, k3, k4 - жесткости пружин, kпр - приведенная жесткость устройства для преобразования движения.
Задача предлагаемой полезной модели заключается в том, что устройство для гашения колебаний действует в тех случаях, когда внешнее воздействие имеет заданные частотные диапазоны, в которых упругие свойства виброзащитной системы обладают свойством самонастройки.
Основным недостатком данного изобретения является отсутствие автоматического регулирования динамического состояния объекта защиты на счет изменения приведенной жесткости упругого блока.
Задачей изобретения является регулирование динамического состояния подвески транспортного средства при помощи изменения приведенной жесткости блока упругих и массоинерционных элементов.
Предлагаемый способ повышения эффективности подвески основан на использовании комбинированной системы массоинерционных и упругих элементов. В системе предусматривается возможность влияния на динамические свойства подвески путем изменения жесткостей k1 и k2, упругих элементов, выполненных в виде пневмобаллонов, давление в которых может изменяться путем за счет подкачки или стравливания воздуха, что осуществляется с помощью управляемого компрессорного устройства. Оценка динамического состояния системы производится с помощью датчика, который фиксирует параметры вибрационных движений.
Способ управления динамическим состоянием подвески транспортного средства, включающий возможность регулировать жесткость упругих элементов подвески, отличающийся тем, что управление динамическим состоянием подвески транспортного средства осуществляют с учетом значений динамических реакций в точках соединения пневмопружин, представляющих собой пневматические упругие элементы, с опорными поверхностями, а также для их соединения между собой через промежуточный массоинерционный элемент, причем формируют динамическую жесткость подвески в целом в зависимости от интенсивности внешнего воздействия путем настройки соотношения жесткостей пневмоэлементов и управляют параметрами жесткости за счет сигналов, поступающих от датчиков, характеризующих динамическое состояние подвески и внешнего воздействия.
Устройство для реализации способа управления динамическим состоянием подвески транспортного средства, основанный на использовании системы подвески, отличающийся тем, что состоит из двух упругих узлов, одним из которых является обычная пружина, вторым - является блок из последовательно соединенных между собой упругих элементов в виде пневмобаллонов, при наличии системы управления, включающей в свой состав компрессор, арматуру передачи сжатого воздуха в пневмобаллоны с возможностями управляемого «стравливания» избыточного давления, а также датчики для замера вибрационного уровня объекта защиты, отличающийся тем, что управление состоянием ведется с учетом значений динамических реакций в точках контакта упругих элементов с опорными поверхностями и между собой при наличии промежуточного массоинерционного элемента между пневмопружинами, формирующего динамическую жесткость структурного образования в зависимости от частоты внешнего воздействия и соотношения жесткостей в упругих пневмоэлементах, управляемых через изменения давления на основе данных, получаемых при обработке поступающих сигналов от датчиков динамического состояния.
Управляющий блок подвески снабжается микропроцессором, который управляет работой компрессора и коммутирующей системы в зависимости от параметров динамических состояний в тт. А, А1 и тт. В-В3, в совокупности определяющих динамические реакции, возникающие в характерных точках подвески.
Сущность предлагаемого способа поясняется чертежами.
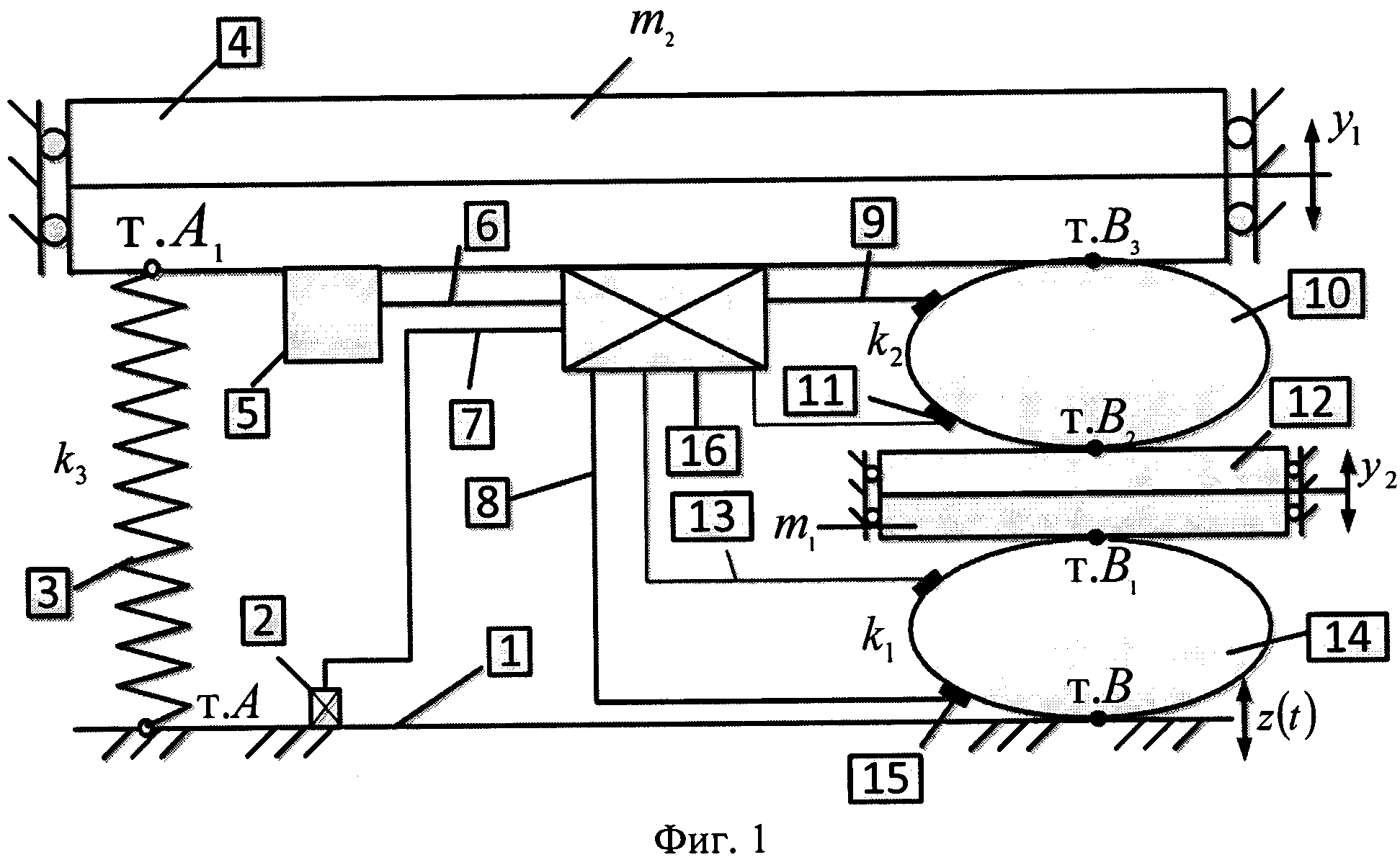
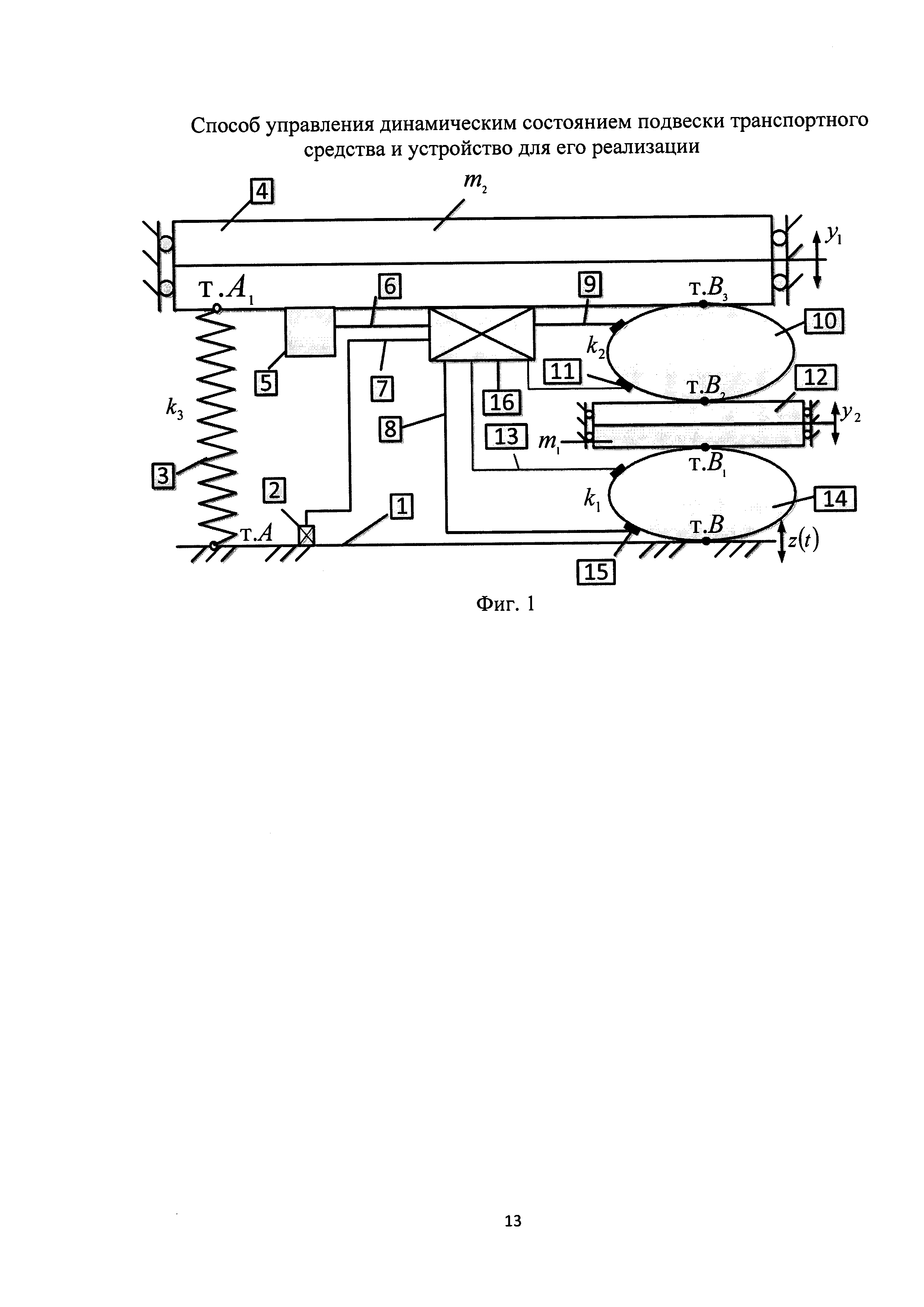
На фиг. 1 приведена принципиальная схема системы подвески, содержащая опорную поверхность 1, соединенную через упругий элемент 3 с жесткостью k3 с корпусом транспортного устройства 4, пневматические пружины 10 и 14 с коэффициентами жесткости k2 и k3, между которыми имеется промежуточный массоинерционный элемент 12. На пружинах 10 и 14 имеются дроссели 11, 15 для «стравливания» лишнего воздуха. На корпусе 4 закрепляется управляющий блок 16, состоящий из источника энергии, компрессора и управляемой аппаратурой, в том числе, каналами подачи сжатого воздуха 9 и 13. Параметры динамического состояния объекта защиты 4 (корпуса) фиксируются датчиками 2 и 5, соединенными с блоком управления через средства коммутации 6 и 7 соответственно.
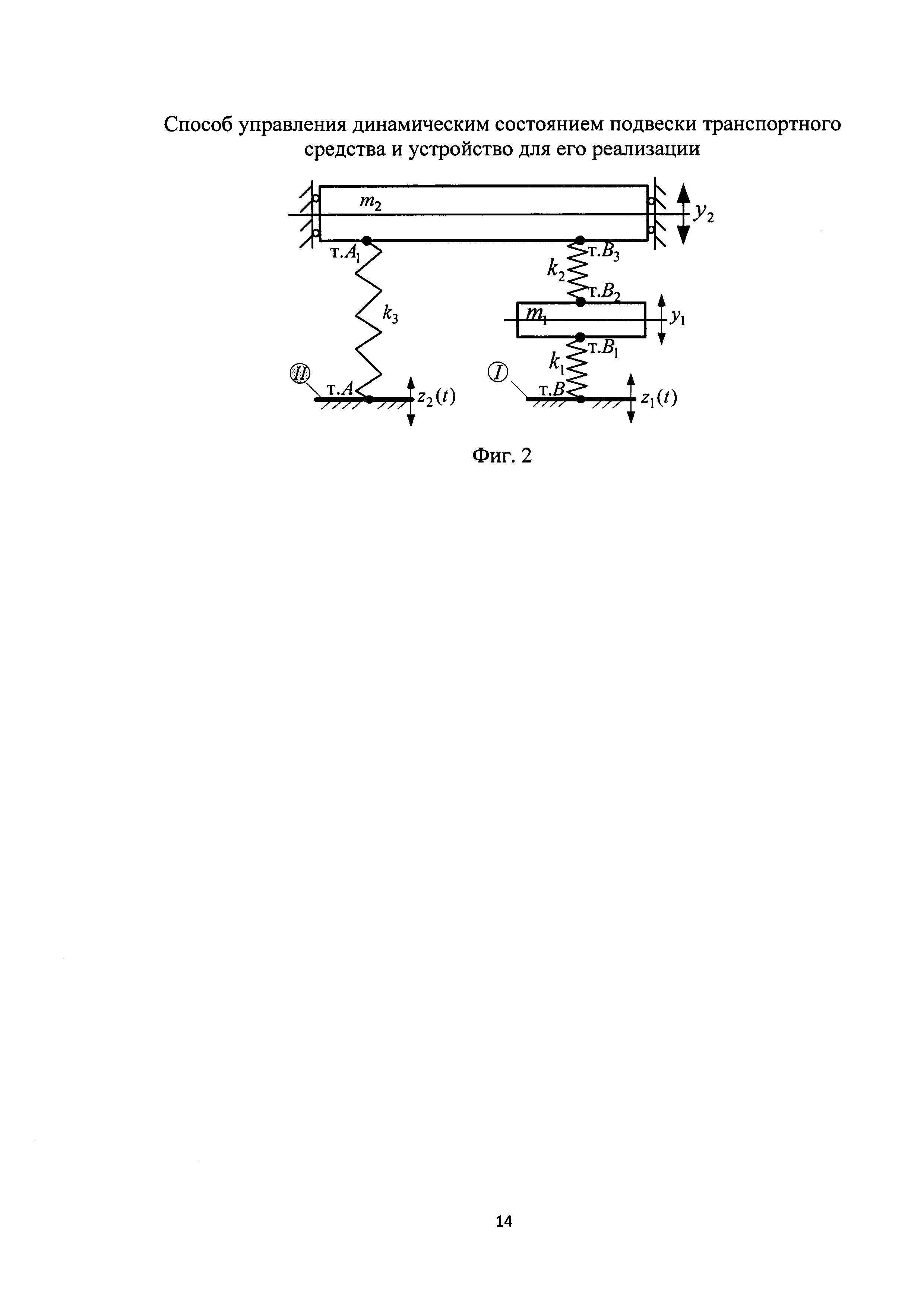
На фиг. 2 представлена расчетная схема подвески в виде механической колебательной системы с двумя степенями свободы
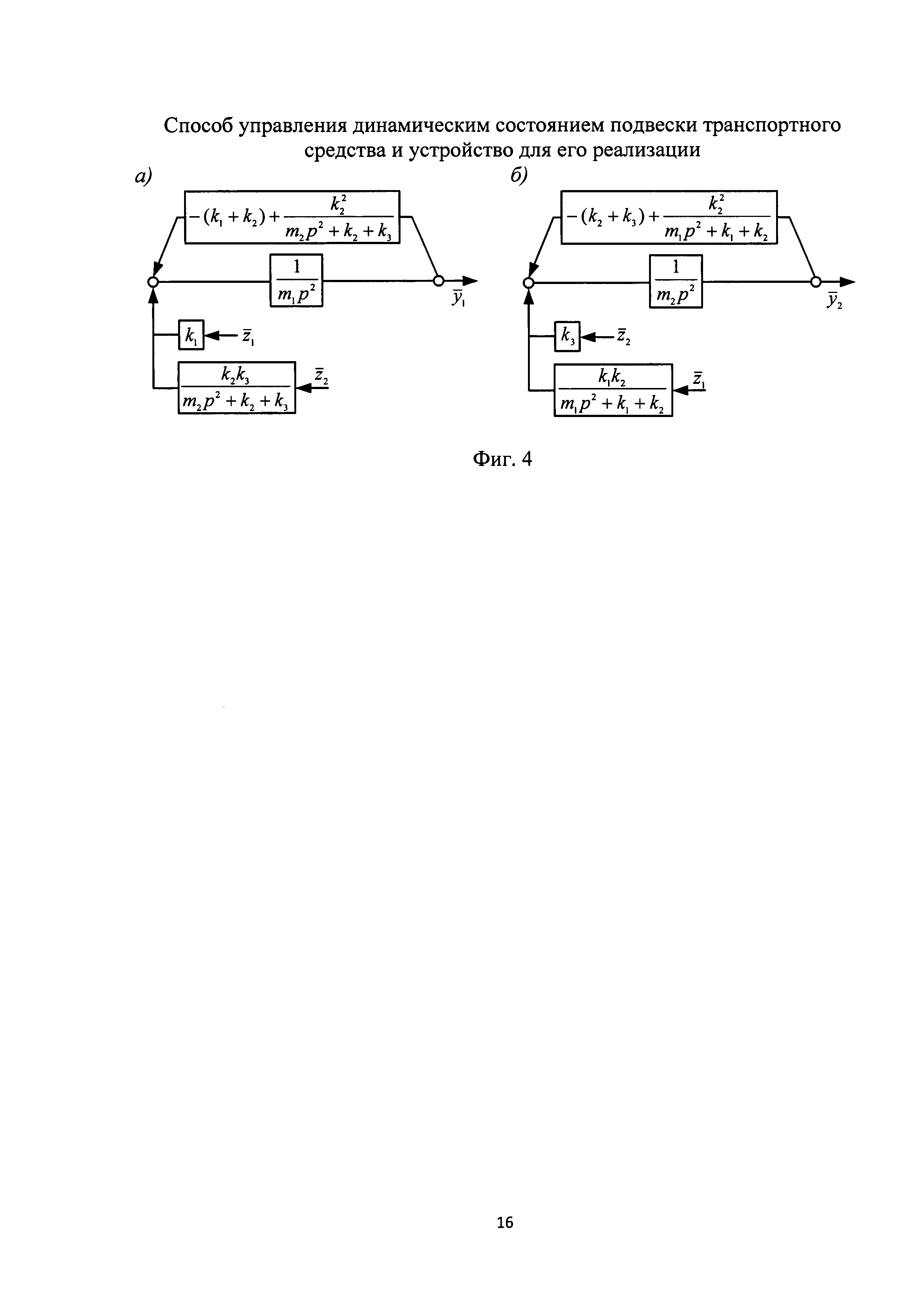
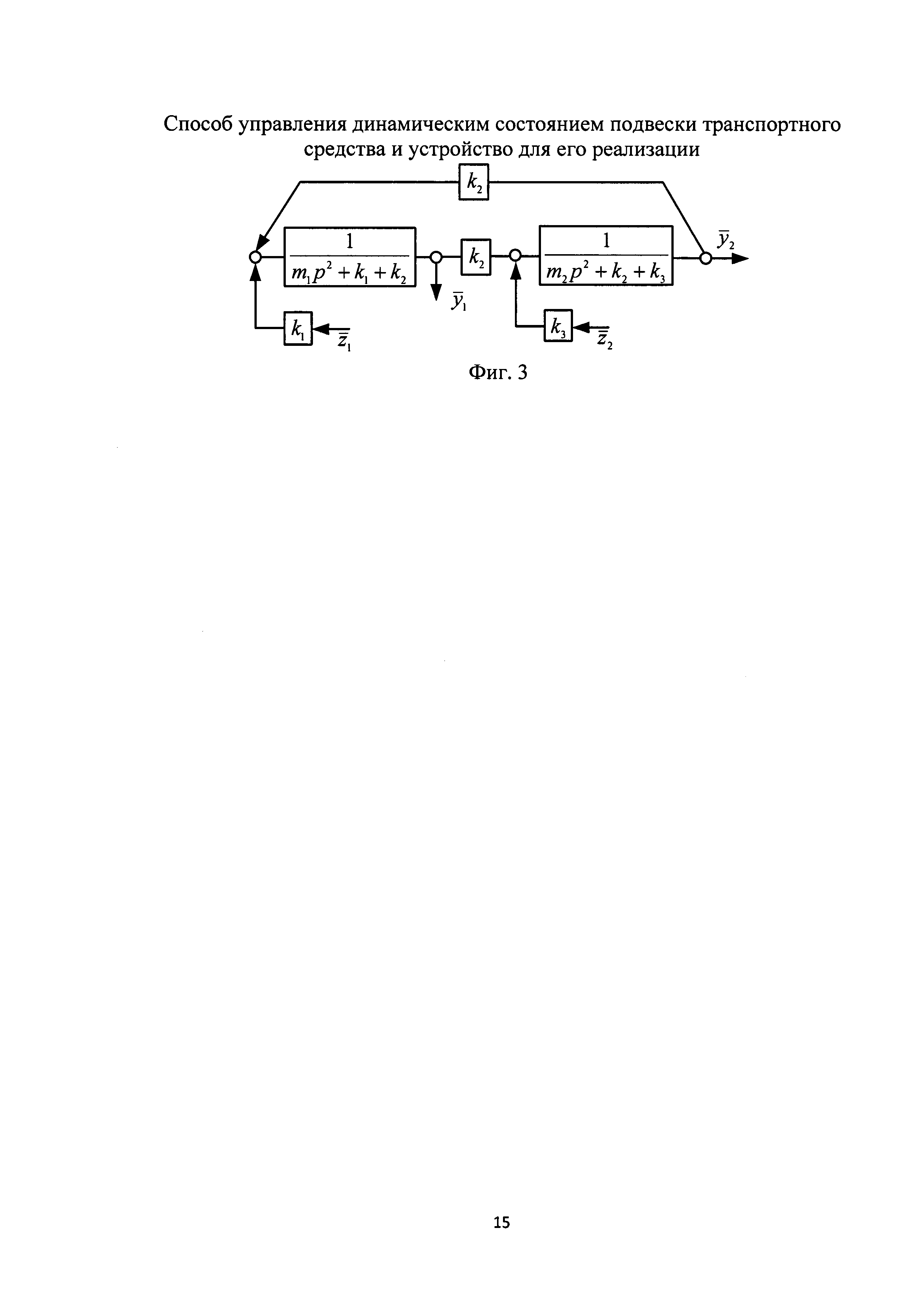
Структурная математическая модель в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления показана на фиг. 3.
На фиг. 4 представлены преобразованные относительно исходной (фиг. 3) структурные схемы системы, приведенные к координатам а) -  , б) -
, б) -  соответственно.
соответственно.
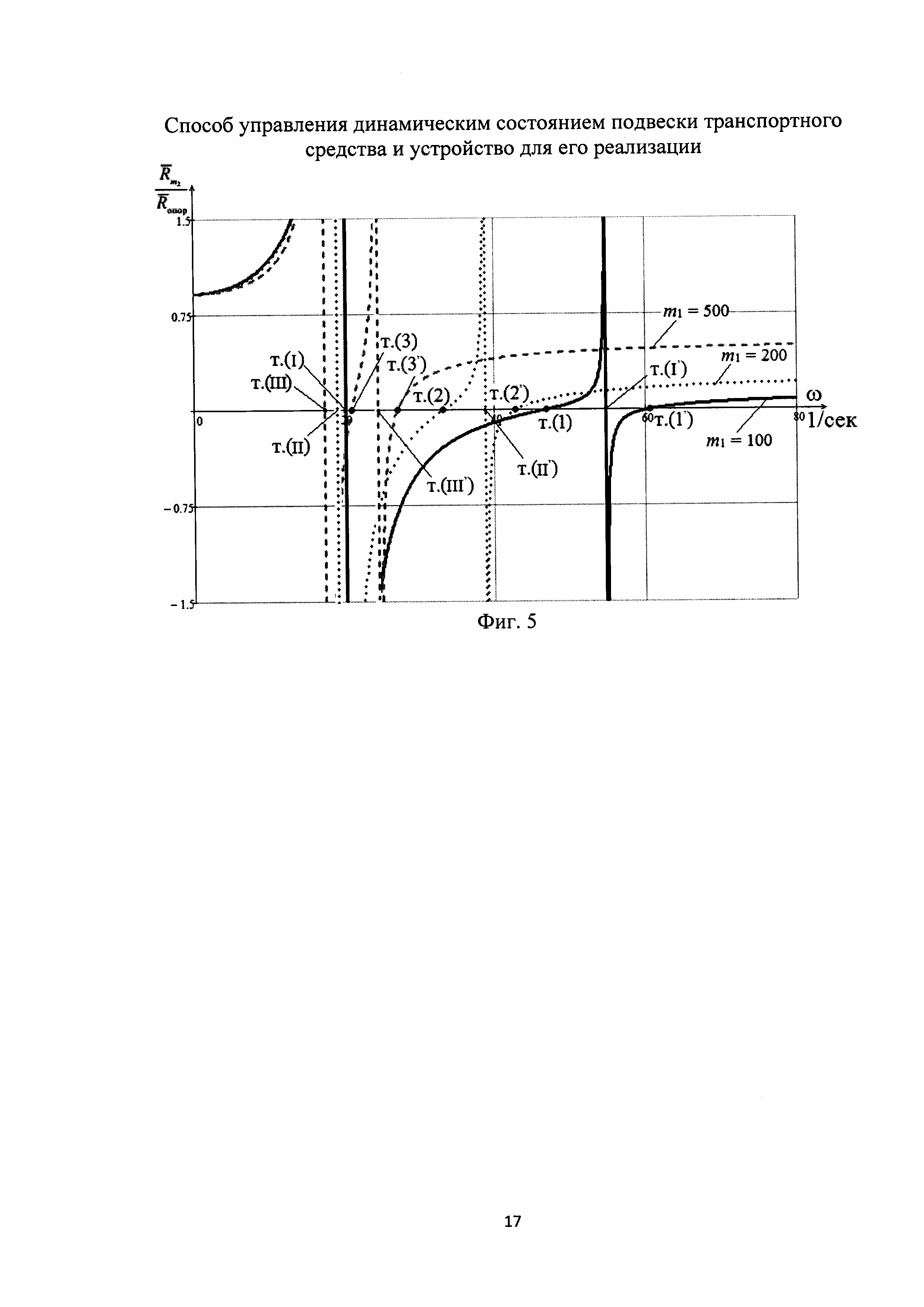
Частотные характеристики отношения реакций связей приведены на фиг. 5.
Система подвески работает следующим образом. При действии кинематического возмущения z(t) в виде неровностей опорной поверхности 1, динамические воздействия передаются по двум параллельным каналам.
Первый канал - упругий элемент 3 с жесткостью k3, который имеет контактные тт. А и А1 с опорной поверхностью 1 и корпусом транспортного устройства 4 с массой М. Второй канал передачи внешних воздействий состоит из двух пневматических пружин 10 и 14, имеющих коэффициенты жесткости k2 и k3 соответственно, в котором выделяются характерные тт. В-В3. На пружинах 7 и 10 имеются дроссели 11, 15 для стравливания лишнего воздуха. Между упругими элементами 10 и 14 имеется промежуточный массоинерционный элемент 12 с массой m. На корпусе 4 закрепляется управляющий блок 16, состоящий из источника энергии, компрессора и управляемой аппаратурой, в том числе, с каналами подачи сжатого воздуха 9 и 13 и сброса давления через управляемые дроссели. Параметры динамического состояния объекта защиты 4 (корпуса) фиксируются датчиками 2, 5 и поступают в блок управления 16 через средства коммутации 6 и 7 соответственно. Управляющее устройство 16 представляет собой агрегат, включающий компрессор, необходимые элементы переключения каналов подачи сжатого воздуха, а также вычислительное устройство (микропроцессор), обеспечивающее определение значений динамических реакций в контролируемых точках подвески.
Особенности работы подвески заключаются в том, что в процессе взаимодействия транспортного средства с опорной поверхностью, определяются динамические реакции в контактах объекта защиты и опорной поверхности, что создает необходимые условия для устойчивой работы подвески, под которым понимается нормирование уровня динамических реакций, возникающих при движении объекта 4 по неровностям опорной поверхности 1.
Теоретическое обоснование работы подвески представлено следующими расчетами.
I. Динамические реакции связей в системе с двумя степенями свободы
Рассматривается расчетная схема подвески (фиг. 2), где m2 - масса объекта защиты, m1 - масса промежуточного инерционного элемента; k1, k2, k3 - жесткости упругих элементов. Система, в целом, опирается на две опорные поверхности I и II, законы движения которых являются гармоническими и полагаются известными (z1(t)≠0, z2(t)≠0).
Характерными точками системы являются точки соединения элементов между собой и с опорными поверхностями I и II (фиг. 2).
Используя приемы, изложенные в [4-6] запишем систему уравнений движения в операторной форме:


где  - комплексная переменная; значок 〈-〉 над переменной означает ее изображение по Лапласу.
- комплексная переменная; значок 〈-〉 над переменной означает ее изображение по Лапласу.
1. Структурная математическая модель в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления приведена на фиг. 3.
Структурная схема состоит из двух парциальных блоков с упругой межпарциальной связью. Передаточные функции системы определяются выражениями


где

- является характеристическим частотным уравнением.
2. Если принимать во внимание возможность внешних кинематических возмущений z1(t) и z2(t) в форме

то передаточные функции системы примут вид


Из (10), (11) следует, что в системе могут возникать режимы динамического гашения колебаний по координатам  и
и  соответственно:
соответственно:
Таким образом, режимы динамического гашения колебаний при одновременном действии двух внешних возмущений будут зависить от α.
Что касается режимов динамического гашения колебаний при раздельном действии внешних возмущений, то для случая z2=0, частота динамического гашения колебаний по координате  определяется выражением
определяется выражением

В свою очередь, по координате  получим, что
получим, что

Таким образом, коэффициент связности α внешних возмущений может оказывать существенное влияние на динамические свойства системы.
II. Определение динамических реакций в характерных точках системы
Структурная схема на фиг. 4 может быть преобразована к виду системы с одной степенью свободы, как это показано на фиг. 4, а, б с учетом возможностей приведения параметров системы по координатам  и
и  в отдельности.
в отдельности.
Назначение обратной связи в схеме на фиг. 4, а по отношению к объекту, имеющему передаточную функцию интегрирующего звена второго рода, в физическом смысле, соответствует динамической жесткости, умножение которой на величину динамического смещения , соответствует динамической реакции в т. В или т. В1. Отметим, что

то есть динамические реакции в тт. В, В1 равны по величине, но направлены в противоположные стороны [7]. Динамические реакции зависят существенным образом от форм внешних воздействий, в частности, при совместных проявлениях когда  ,
,  .
.
Воспользуемся понятием коэффициента связности α для рассмотрения общего случая, полагая, что  .
.
1. Динамические реакции в тт. В и В1 равны по величине, но направлены в противоположные стороны:  . Используя эти выражения для передаточной функции (10), (11), найдем, что
. Используя эти выражения для передаточной функции (10), (11), найдем, что

Введем понятие передаточной функции динамической реакции связи по кинематическому возмущению  , что определится выражением
, что определится выражением

На частоте

динамическая реакция связи  принимает нулевое значение.
принимает нулевое значение.
Кроме того, реакция связь  принимает бесконечно большие значения при резонансных режимах.
принимает бесконечно большие значения при резонансных режимах.
2. Динамические реакции в тт. А и А1 определяются, в свою очередь, выражением 
Аналогично, для  (p) получим
(p) получим

При частоте

динамическая реакция  принимает нулевое значение.
принимает нулевое значение.
Общая динамическая связь, передающаяся на опорные поверхности, определится выражением
Динамическая реакция  принимает нулевое значение на частоте
принимает нулевое значение на частоте

3. Для объекта m2, динамическое состояние которого оценивается, реакция связи может найдена из выражения

где kпр определяется из структурной схемы на рис. 4, б:

В этом случае реакция связи примет вид

или

Отношение динамические реакций на объекте и на опорной (объединенной) поверхности может служить характеристикой амортизирующего устройства.
Отношение реакции можно обозначить как

По результатам решения модельной задачи на фиг. 5 приводятся графики зависимости N(ω), построенных при различных значениях параметров системы, которые имеют следующие значения: α=1; m1=100, 200, 500 кг; m2=10000 кг; k1=100000 Н/м; k2=200000 Н/м; k3=300000 Н/м. Сплошная линия ( ) соответствует случаю (m1=100 кг), точечная линия (
) соответствует случаю (m1=100 кг), точечная линия ( ) (m2=200 кг); штриховая линия (
) (m2=200 кг); штриховая линия ( ) соответствует (m1=500 кг). Частотные характеристики реакций связей имеют специфический вид. При каждом наборе параметров имеются две частоты, при которых N, определяемая выражением (28) стремится к бесконечно большим значениям, что связано с тем, что знаменатель (28) является биквадратным полиномом по ω2. В свою очередь, числитель (28) также при двух значениях частоты принимается нулевые значения. Это соответствует нулевым значениям реакций связи на массоинерционный элемент m2 (или на объект защиты в подвеске).
) соответствует (m1=500 кг). Частотные характеристики реакций связей имеют специфический вид. При каждом наборе параметров имеются две частоты, при которых N, определяемая выражением (28) стремится к бесконечно большим значениям, что связано с тем, что знаменатель (28) является биквадратным полиномом по ω2. В свою очередь, числитель (28) также при двух значениях частоты принимается нулевые значения. Это соответствует нулевым значениям реакций связи на массоинерционный элемент m2 (или на объект защиты в подвеске).
Характерными точками на пересечениях графиков N(ω) с осью абсцисс являются тт. (1), (1'); (2), (2'); (3), (3') (фиг. 5). Расстояние между характерными точками зависят от значений m1 и могут таким образом определять границы, в пределах которых изменяются возможности создания режимов динамического гашения колебаний. Необходимо отметить, что в постановке задачи на предварительном этапе силы сопротивления не учитывались.
В алгоритмическую основу управления динамическим состоянием положена технология определения динамических реакций связей между элементами при различных формах внешних воздействий, в том числе, и при одновременном действии двух внешних возмущений. Используется понятие об амплитудно-частотной характеристике реакций связей, определяемой как отношения реакции в двух характерных точках: контакт с опорной поверхностью и контакт амортизатора и объекта защиты. При наличии в системе инерционных связей (в рассматриваемом случае - это промежуточная масса m1) в подвеске становятся возможными проявлениями специфических режимов, которые можно отнести к режимам динамического гашения внешних возмущений, передаваемых на объект защиты. Инерционные связи могут быть реализованы за счет различных рычажных, зубчатых или винтовых несамотормозящихся механизмов, создающих эффекты формирования приведенных масс.
Список литературы
1. Ротенберг Р.В. Подвеска автомобиля. Колебания и плавность хода. Москва: Машиностроение, 1972. - 392 с.
2. Дембаремдикер А.Д. Амортизаторы транспортных машин. - М.: Машиностроение, 1985. - 199 с.
3. Галиев И.И., Нехаев В.А., Николаев В.А. Методы и средства виброзащиты железнодорожных экипажей. - М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте». 2010. - 340 с.
4. Елисеев С.В., Резник Ю.И., Хоменко А.П., Засядко А.А. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов. - Иркутск: ИГУ. 2008. - 523 с.
5. Елисеев С.В. Мехатронные подходы в динамике механических колебательных систем / С.В. Елисеев, Ю.Н. Резник, А.П. Хоменко. -Новосибирск: Наука, 2011. - 384 с.
6. Елисеев С.В. Прикладная теория колебаний в задачах динамики линейных механических систем / С.В. Елисеев, А.И. Артюнин. - Новосибирск: Наука, 2016. - 459 с.
7. Кашуба В.Б. Динамические реакции в соединениях элементов механических колебательных систем / В.Б. Кашуба, С.В. Елисеев, Р.С. Большаков. - Новосибирск: Наука, 2017. - 331 с.
Маховик с регулируемым моментом инерции
Способ настройки режимов работы виброзащитной системы и устройство для его осуществления
Способ и устройство для динамического гашения колебаний
Способ контроля устойчивости бесстыкового рельсового пути
Поглощающее лазерное излучение покрытие и способ его получения
Способ оценки технического состояния инженерного сооружения
Способ и устройство оценки технического состояния инженерного сооружения
Способ управления характеристикой вибрационного поля и устройство для его осуществления
Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления
Способ определения критических скоростей ротора, работающего в зарезонансной области

