Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ КАЛИБРОВКИ ДАТЧИКА ДИНАМИЧЕСКОГО КОНТРОЛЯ ВЕСА
Вид РИД
Изобретение
Данное изобретение касается устройства для калибровки датчика динамического контроля веса (WIM - Weigh In Motion, динамический контроль веса) согласно ограничительной части независимого пункта 1 формулы изобретения. Данное изобретение касается также способа калибровки датчика динамического контроля веса согласно ограничительной части независимого пункта 10 формулы.
Датчик динамического контроля веса или, по-другому, весовой дорожный датчик или WIM датчик представляет собой датчик силы, встраиваемый в полотно проезжей части. С помощью этого встроенного в полотно проезжей части весового дорожного датчика может измеряться сила веса транспортного средства, проезжающего по полотну проезжей части. По измеренной силе веса может получаться разнообразная информация о дорожном движении, например, давление колеса, нагрузка на дорогу, передаваемая через ось, общий вес, давление в шине проезжающего транспортного средства. Зачастую весовой дорожный датчик представляет собой пьезоэлектрический датчик силы, который определяет силу веса транспортного средства, которое проезжает по этому весовому дорожному датчику с нормальной скоростью движения транспорта. Такой пьезоэлектрический датчик силы выдает электрический сигнал, пропорциональный величине измеренной силы веса, который направляется в устройство анализа данных и там анализируется. Весовой дорожный датчик и устройство анализа данных образуют, таким образом, систему автоматизированного сбора информации о дорожном движении.
Весовой дорожный датчик на месте встраивается в полотно проезжей части, что ведет к различиям в качестве установки. Качество установки отражает фактическое состояние встроенного в полотно проезжей части весового дорожного датчика. Качество установки учитывает свойства структуры полотна проезжей части с верхним строением полотна, нижним строением и подстилающим грунтом. Полости в структуре полотна проезжей части, например, вызванные повреждениями от воды, сказываются на таких показателях качества весового дорожного датчика, как чувствительность, линейность, гистерезис и т.д. Однако, различные глубины установки указанных WIM датчиков под поверхностью полотна проезжей части сказываются на их показателях качества. Наличие выпучиваний или впадин в поверхности полотна проезжей части тоже оказывают влияние на эти показатели качества. Чувствительность - это отношение изменения электрического сигнала, выдаваемого пьезоэлектрическим датчиком силы, к изменению определяемой силы веса. Линейность - это отклонение пропорциональности между значением определяемой силы веса и электрическим сигналом, выдаваемым пьезоэлектрическим датчиком силы. Гистерезис представляет собой наибольшую разницу у выдаваемого пьезоэлектрическим датчиком силы электрического сигнала для одного значения одной определяемой силы веса, если это значение сначала достигается с возрастающей, а затем с убывающей силой веса.
Существует стремление характеризовать качество установки встроенного в полотно проезжей части WIM датчика с высокой точностью.
К тому же, есть потребность в получении информации о дорожном движении с высокой точностью, чтобы сделать возможным обязательный с правовой точки зрения контроль перегрузок или базирующееся на весе повышение дорожного сбора. Так, Международная организация законодательной метрологии (OIML) в стандарте OIML R-134 рекомендует точность до 0,10% при определении общего веса проезжающего транспортного средства. Для этого требуется калибровка встроенного в полотно проезжей части WIM датчика.
В публикации CH 702963 A1 раскрыт такой способ калибровки WIM датчика, встроенного в полотно проезжей части. Для этого по весовому дорожному датчику проезжает калибровочное транспортное средство, которое содержит динамометр. Динамометр установлен на колесе калибровочного транспортного средства. Во время такого проезда динамометр определяет воздействующее на колесо давление колеса в зависимости от времени или места, а WIM датчик определяет силу веса калибровочного транспортного средства. Динамометр определяет указанное давление колеса со значительно более высокой точностью, чем WIM датчик определяет силу веса. Динамометр выдает данные, соответствующие измеренному давлению колеса, а WIM датчик выдает данные, соответствующие измеренной силе веса, причем указанные данные сравниваются друг с другом в устройстве анализа данных. По результатам сравнения определяется градуировочная функция WIM датчика.
Было установлено, что раскрытый в документе CH 702963 A1 способ калибровки зависит от состояния полотна проезжей части. Полотно проезжей части подвержено износу. Выбоины и колеи от колес в полотне проезжей части вблизи от WIM датчика могут искажать градуировочную функцию, и тогда эта градуировочная функция оказывается неточной. В таком случае процесс калибровки должен повторяться, что сопряжено с временными затратами.
В CH 702963 A1 упомянута также возможность измерения деформаций оси калибровочного транспортного средства и соотнесения этих измеренных деформаций оси с весом калибровочного транспортного средства. Однако, это предполагает калибровку самого калибровочного транспортного средства, что требует времени и сопряжено с затратами.
Первая задача данного изобретения состоит в том, чтобы предложить устройство для калибровки WIM датчика, которое с высокой точностью калибрует заделанный в полотно проезжей части WIM датчик. Другой задачей данного изобретения является разработка способа калибровки WIM датчика, который обеспечивает высокую точность калибровки заделанного в полотно проезжей части WIM датчика.
По меньшей мере одна из этих задач решается признаками независимых пунктов формулы изобретения.
Данное изобретение касается устройства для калибровки заделанного в полотно проезжей части WIM датчика (Weigh-In-Motion (WIM)- динамический контроль веса); причем это устройство содержит по меньшей мере датчик силы, причем датчик силы регистрирует эталонную силу, с помощью которой может калиброваться WIM датчик (=датчик динамического контроля веса); указанное устройство содержит аппликатор, с помощью которого эталонная сила может прикладываться к полотну проезжей части; причем это устройство содержит исполнительное устройство, которое вырабатывает эталонную силу; и причем исполнительное устройство, датчик силы и аппликатор механически связаны друг с другом и образуют транспортное средство.
В уровне техники согласно CH 702963 A1 определяется воздействующая на колесо калибровочного транспортного средства сила колеса, и WIM датчик калибруется по весу калибровочного транспортного средства. При этом принимается, что сила колеса и вес калибровочного транспортного средства находятся в жестком соотношении друг с другом. Однако, было установлено, что сила колеса зависит от состояния полотна проезжей части и может изменяться при наличии выбоин, колей от колес, а также может меняться со свойствами подстилающего грунта полотна проезжей части. К погрешностям калибровки могут привести также вибрации калибровочного транспортного средства, так как эти вибрации проявляются как возмущающая сила, которая накладывается как на определяемое силы колеса, так и на определяемую силу веса.
Здесь и используется предлагаемое изобретением устройство, в котором исполнительное устройство с высокой точностью создает эталонную силу. Эта созданная эталонная сила с высокой точностью регистрируется датчиком силы и с высокой точностью прикладывается аппликатором к полотну проезжей части. Для этого исполнительное устройство, датчик силы и аппликатор механически связаны друг с другом и образуют транспортное средство. Создание, регистрация и приложение этой эталонной силы осуществляются, таким образом, одновременно и с высокой точностью в одном транспортном средстве.
Данное изобретение касается также способа калибровки заделанного в полотно проезжей части WIM датчика (датчик динамического контроля веса), при котором WIM датчик калибруется вдоль калибровочного пути; причем эталонная сила регистрируется по меньшей мере одним датчиком силы; причем эта эталонная сила прикладывается аппликатором вдоль калибровочного пути к полотну проезжей части; причем эта эталонная сила в месте установки WIM датчика регистрируется этим WIM датчиком как сила веса; и причем эта зарегистрированная WIM датчиком сила веса сравнивается с зарегистрированной эталонной силой; причем положение калибровочного пути относительно места установки этого WIM датчика регистрируется по меньшей мере одним датчиком положения; и причем аппликатор перемещается вдоль калибровочного пути с помощью приводного устройства.
В предлагаемом изобретением способе положение калибровочного пути относительно места установки WIM датчика с высокой точностью регистрируется датчиком положения. Эталонная сила вслед за этим с помощью аппликатора вдоль калибровочного пути прикладывается к полотну проезжей части. Таким образом, положение калибровочного пути регистрируется с высокой точностью и тем самым качество установки встроенного в полотно проезжей части WIM датчика тоже с высокой точностью характеризуется датчиком силы и WIM датчиком. Так что предлагаемый изобретением способ дает возможность с точностью до миллиметра определять место установки WIM датчика и перемещать аппликатор с точностью до миллиметра относительно места установки этого WIM датчика. Если же в поверхности полотна проезжей части в месте установки WIM датчика имеется выпучивание или проседание, то этот дефект с точностью до миллиметра характеризуется датчиком силы и WIM датчиком, и при калибровке учитывается как таковой. В уровне техники согласно CH 702963 A1 локализация калибровочного транспортного средства осуществляется с помощью GPS-сигналов, что является значительно менее точным.
В дальнейшем данное изобретение будет разъяснено более подробно на примерах осуществления с привлечением чертежей. На них показано следующее.
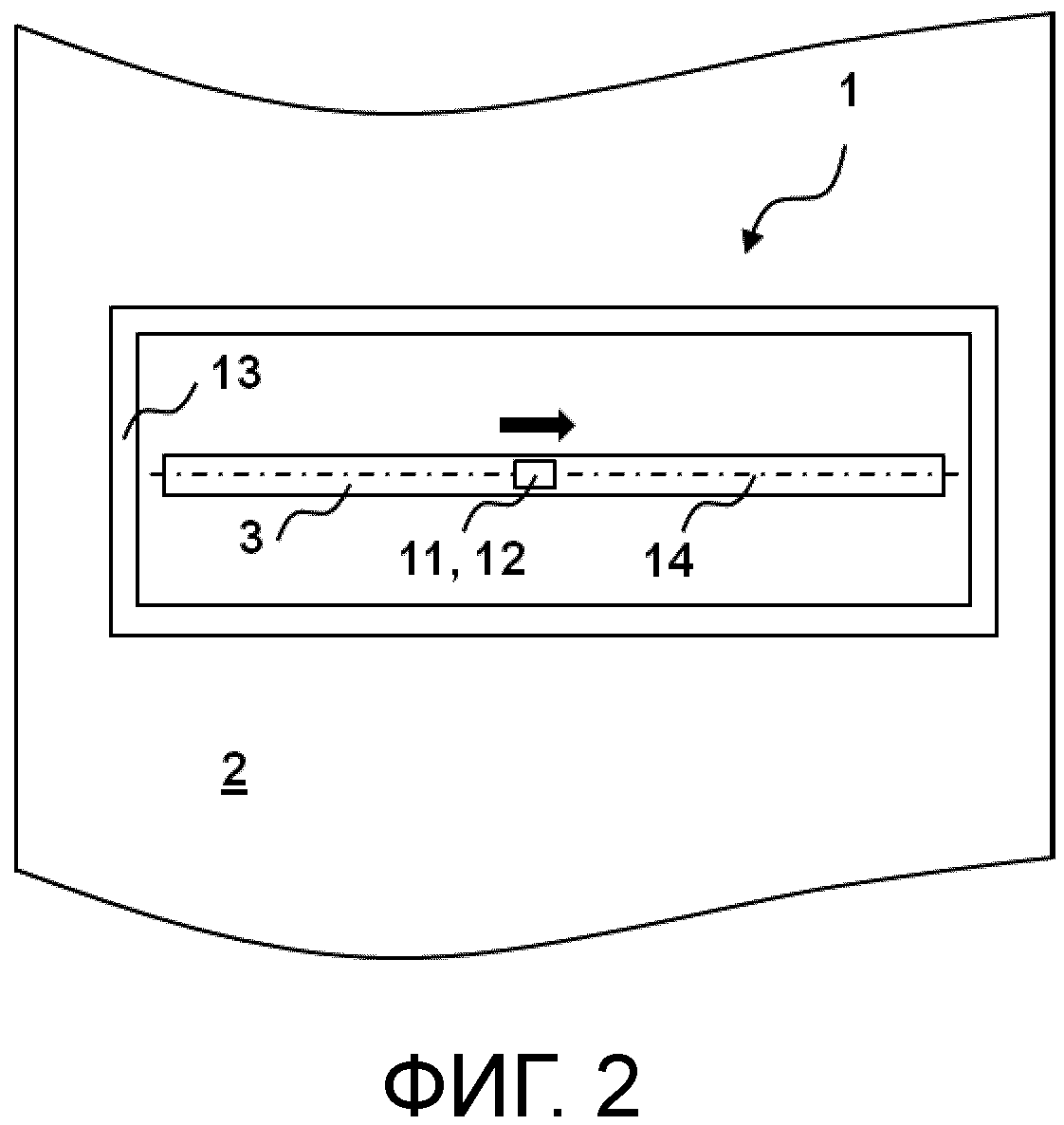
Фиг.1 схематичный вид одного предпочтительного варианта выполнения устройства для калибровки встроенного в полотно проезжей части WIM датчика, где WIM датчик калибруется вдоль направления перемещения;
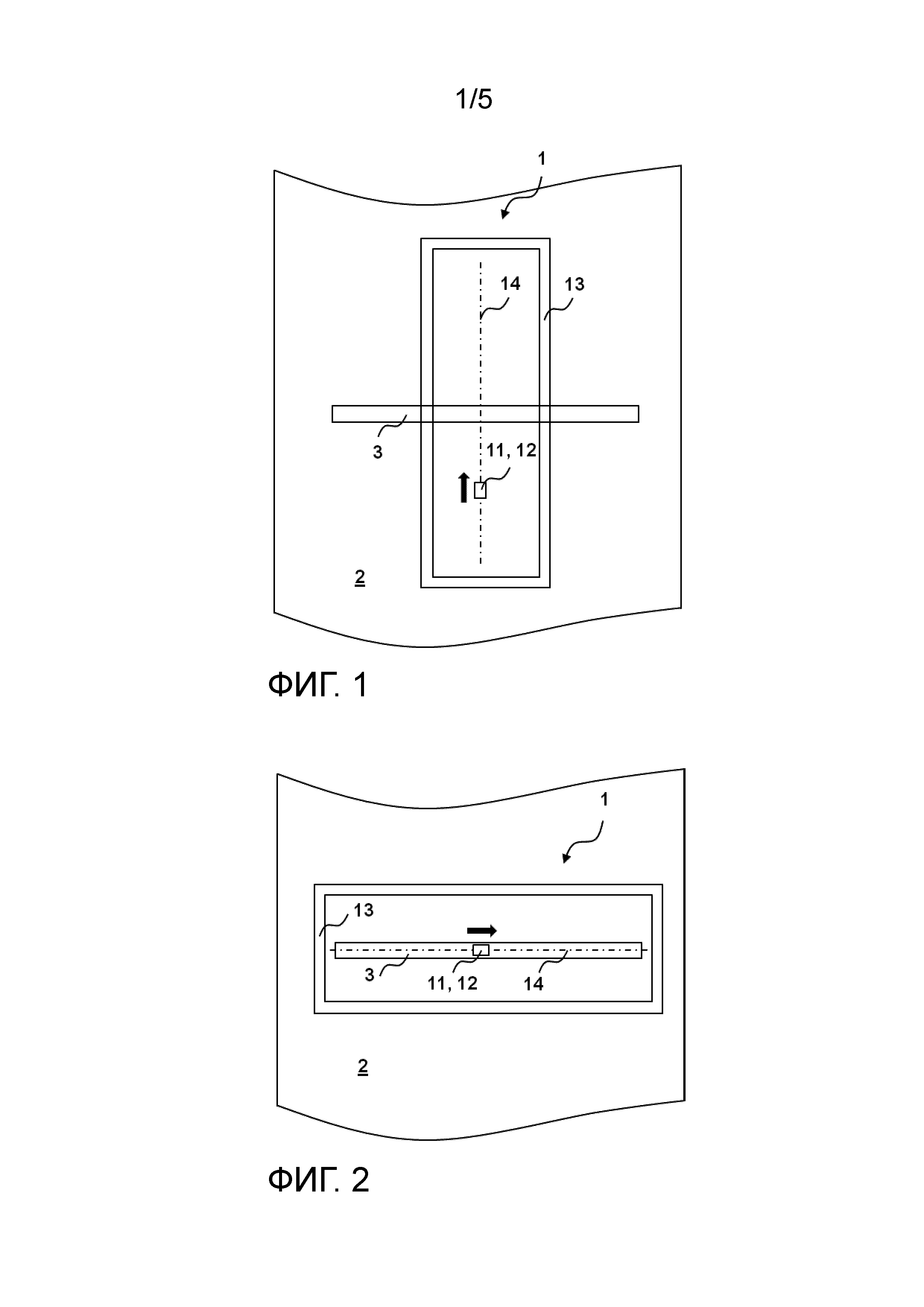
Фиг.2 схематичный вид устройства по Фиг.1, где WIM датчик калибруется вдоль продольного направления датчика;
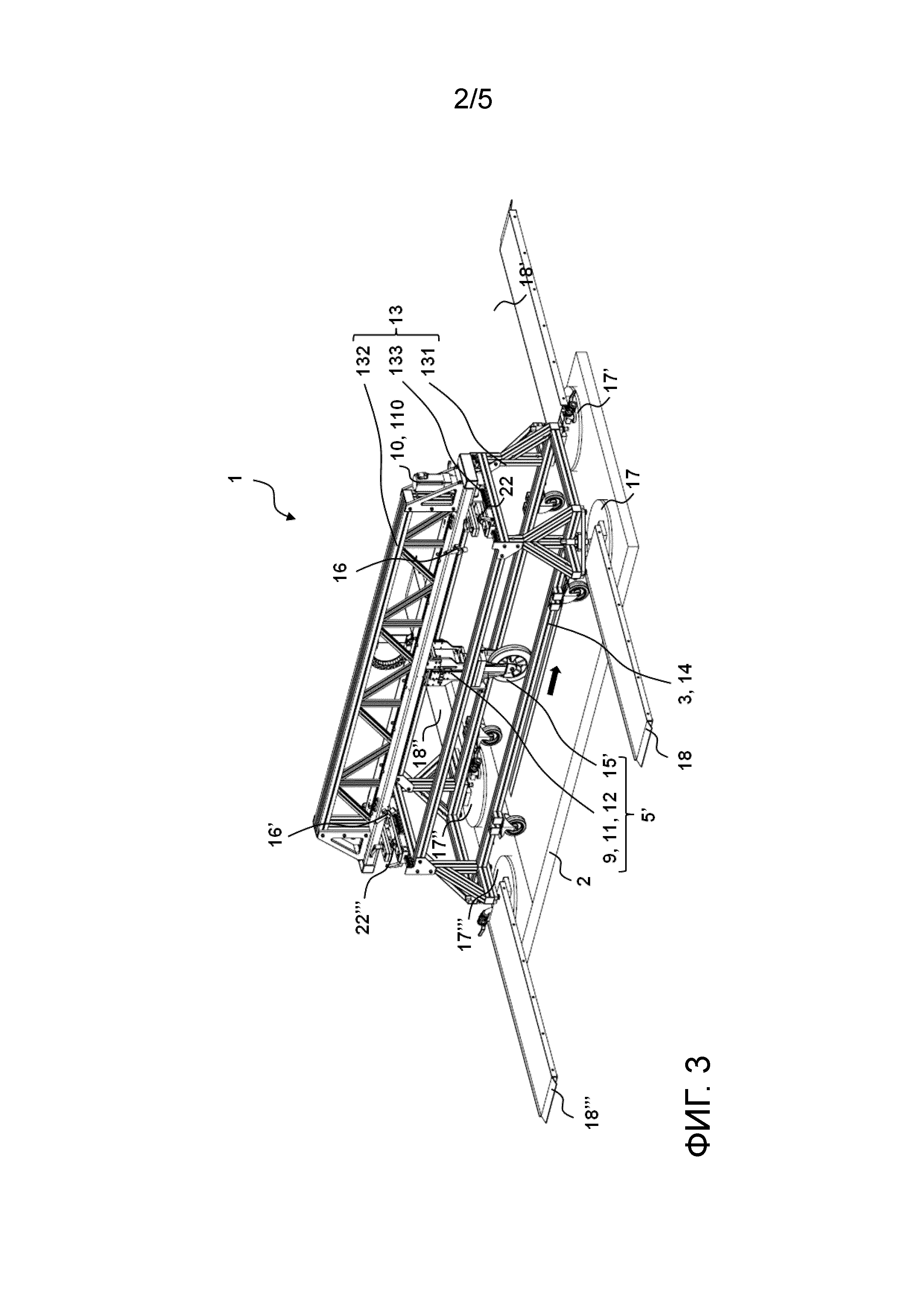
Фиг.3 вид в перспективе части устройства по Фиг.1 или Фиг.2, где WIM датчик калибруется вдоль продольного направления датчика;
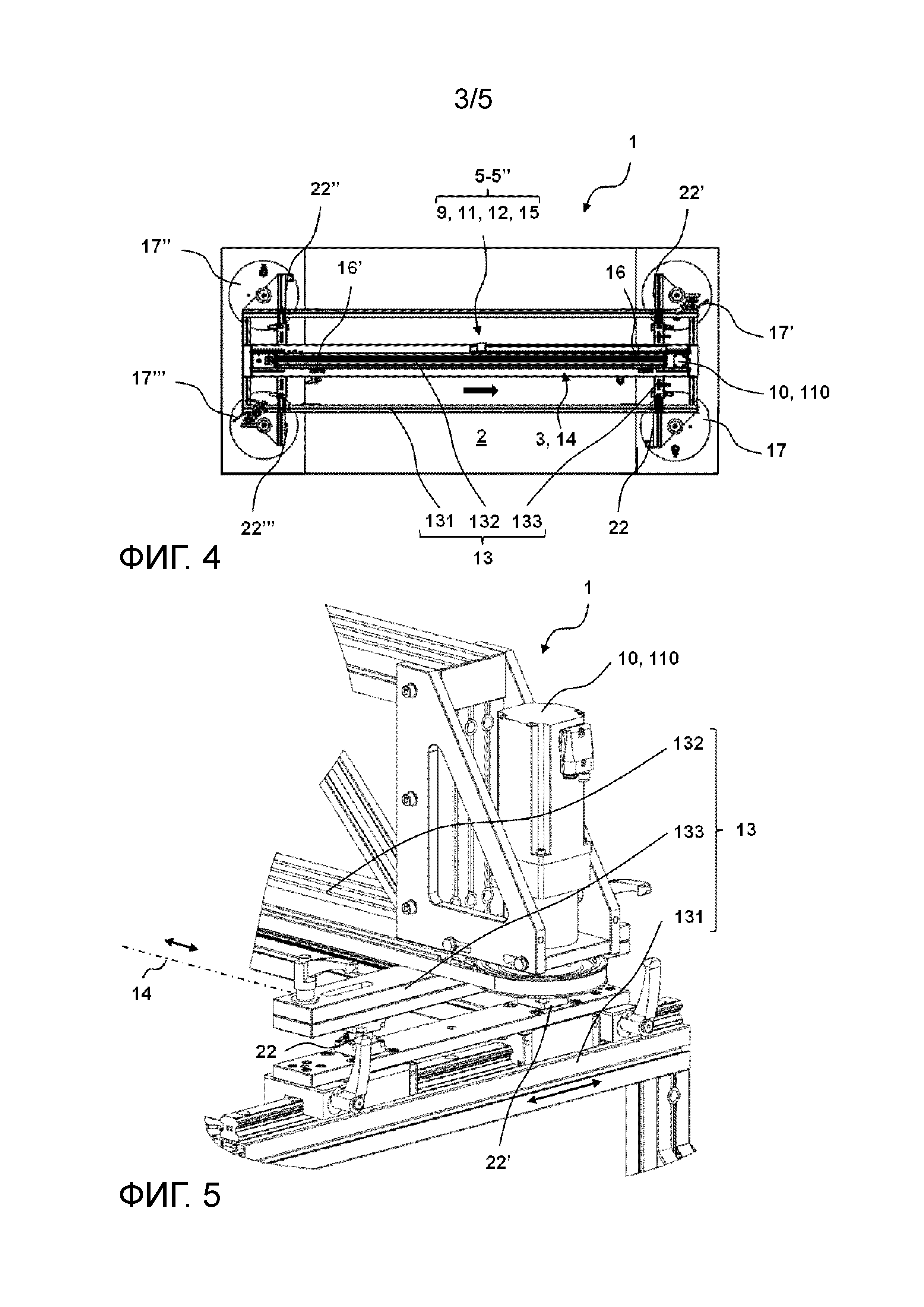
Фиг.4 вид сверху части устройства по Фиг.1-3, где WIM датчик калибруется вдоль продольного направления датчика;
Фиг.5 вид в перспективе части направления продольной балки относительно основания рамы устройства по Фиг.1-4;
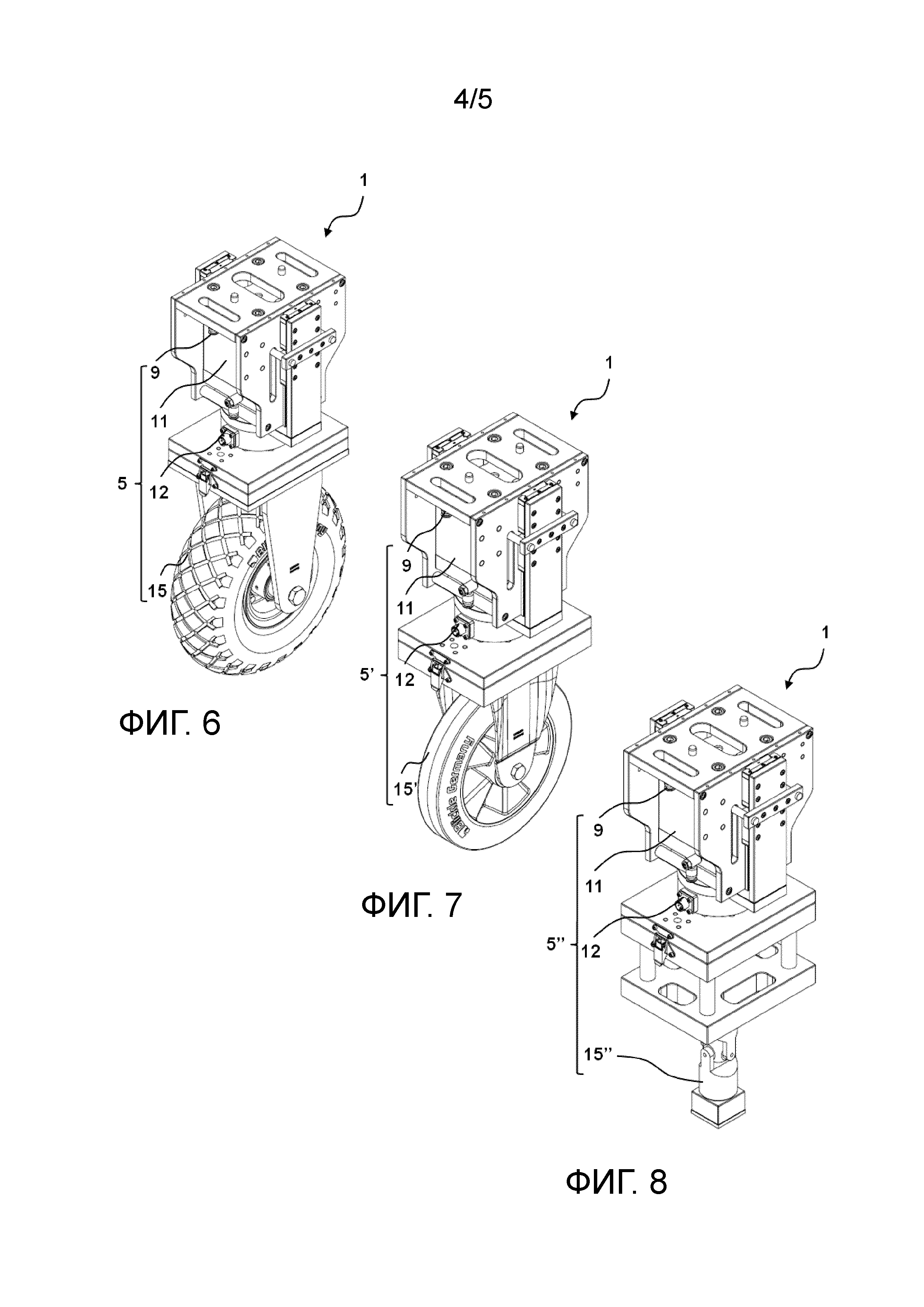
Фиг.6 вид в перспективе части первого варианта выполнения транспортного средства с ширококолесным аппликатором указанного устройства по Фиг.1-4;
Фиг.7 вид в перспективе части второго варианта выполнения транспортного средства с узкоколесным аппликатором устройства по Фиг.1-4;
Фиг.8 вид в перспективе части третьего варианта выполнения транспортного средства со штампообразным аппликатором устройства по Фиг.1-4; и
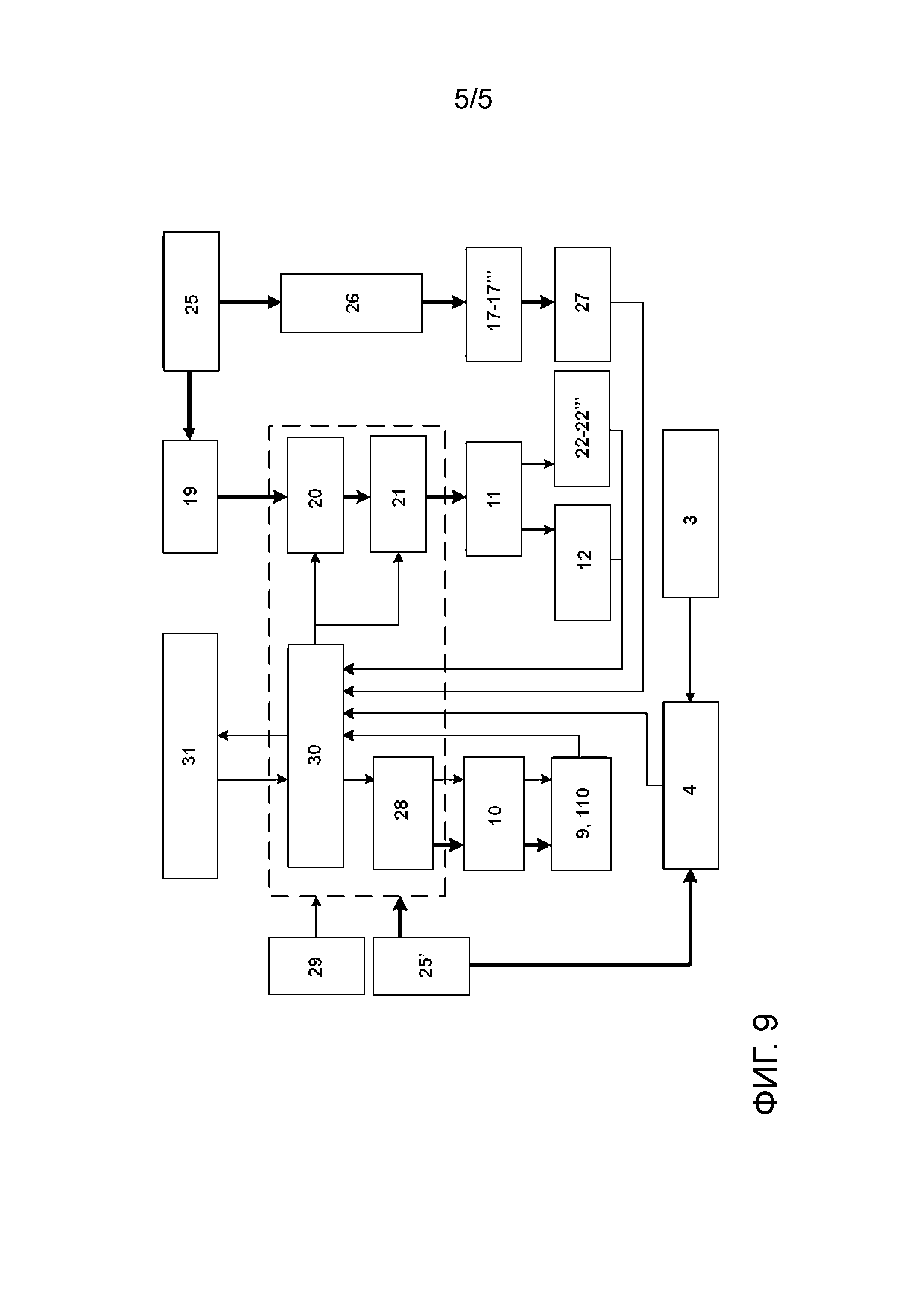
Фиг.9 схематичное изображение устройства по Фиг.1-4 для калибровки встроенного в полотно проезжей части WIM датчика.
На Фиг.1 и Фиг.2 показаны два схематичных вида одного предпочтительного варианта выполнения устройства 1 для калибровки встроенного в полотно 2 проезжей части WIM датчика (датчик динамического контроля веса) 3. По полотну 2 проезжей части едут транспортные средства в направлении движения или против него. Полотно 2 проезжей части снабжено слоем покрытия. Слой покрытия состоит из механически стойкого материала, такого как асфальт, бетон, и т.д.
Предпочтительно WIM датчик 3 представляет собой пьезоэлектрический датчик силы, который выдает электрические сигналы, пропорциональные величине определяемой силы веса. Датчик 3 в продольном направлении датчика содержит несколько пьезоэлектрических приемных элементов, которые предпочтительно расположены на расстоянии от 80 мм до 120 мм друг от друга. Предпочтительно определение силы веса осуществляется с временным разрешением менее 1 кГц. Электрические сигналы направляются в устройство 4 анализа данных и там обрабатываются. Это представлено на схематичном изображении устройства 1 на Фиг.9.
WIM датчик 3 расположен в пазе полотна 2 проезжей части и залит защитной массой. Паз имеет такие размеры, что датчик 3 полностью помещается в нем. Этот паз проходит ниже поверхности полотна 2 проезжей части в продольном направлении датчика перпендикулярно или под углом к направлению перемещения. Предпочтительно WIM датчик 3 в продольном направлении датчика имеет длину 1000 мм или более, тогда как в направлении перемещения он имеет ширину от около 30 мм до 50 мм, и в вертикальном направлении имеет высоту от 20 мм до 70 мм. Защитная масса покрывает WIM датчик 3 заподлицо с поверхностью полотна 2 проезжей части. «Заподлицо» в смысле данного изобретения следует понимать так, что эта защитная масса не выступает из поверхности полотна 2 проезжей части. Вертикальное направление проходит перпендикулярно поверхности полотна 2 проезжей части. WIM датчик 3 полностью залит в полотне 2 проезжей части и в вертикальном направлении лежит примерно на 50 мм под поверхностью полотна 2 проезжей части. Защитная масса отличается от слоя покрытия цветом и даже химической структурой, так что эта защитная масса делает хорошо заметным место установки WIM датчика 3 в полотне 2 проезжей части. На Фиг.1-4 продольное направление датчика ориентировано перпендикулярно направлению перемещения. При знании существа данного изобретения WIM датчик может быть изготовлен и с другими значениями длины и ширины, так что этот весовой дорожный датчик может быть прямоугольным, с шириной от 200 мм до 800 мм, длиной от 200 мм до 800 мм и высотой от 20 мм до 70 мм. WIM датчик может быть и в форме круга, с диаметром от 200 мм до 800 мм и высотой от 20 мм до 70 мм. К тому же, WIM датчик может быть уложен в паз в полотне проезжей части и без заливки защитной массой. Вместо защитной массы WIM датчик может иметь крышку, которая расположена заподлицо с поверхностью полотна проезжей части. WIM датчик может быть динамометром.
Устройство 1 собирается на подлежащем калибровке WIM датчике 3 на полотне 2 проезжей части, и оно снова демонтируется с полотна 2 проезжей части после калибровки этого WIM датчика 3. Для этого указанное устройство 1 подвозится и увозится на транспортировочном средстве. Во время калибровки полотно 2 проезжей части не может использоваться для движения транспортных средств. Для быстрой установки и демонтажа на полотно 2 проезжей части устанавливаются лишь немногие компоненты устройства 1, тогда как остальные компоненты устройства 1 остаются установленными в транспортировочном средстве. Упомянутые немногие компоненты, такие как исполнительное устройство 11 и по меньшей мере один датчик 12 силы расположены на раме 13, так что только эта рама 13 устанавливается на полотно 2 проезжей части. Другие компоненты устройства 1, такие как блок 30 сбора и регистрации данных, вычислительный блок 31, пневматический насос 19, по меньшей мере один блок 25, 25' электропитания, вакуум-насос 26, и т.д. остаются в транспортировочном средстве.
Рама 13 состоит из механически стойкого материала, такого как чистые металлы, сплавы на основе алюминия, сплавы на основе никеля, сплавы на основе кобальта, сплавы на основе железа, и т.д. Рама 13 содержит основание 131 и продольную балку 132. Относительно полотна 2 проезжей части основание 131 расположено под продольной балкой 132. На виде сверху это основание 131 предпочтительно имеет прямоугольную форму. Рама 13 устанавливается на полотно 2 проезжей части так, что область поверхности полотна 2 проезжей части в месте установки WIM датчика 3 окружается рамой 13. Эта окруженная рамой 13 область поверхности полотна 2 проезжей части на Фиг.1 и 2 предпочтительно тоже прямоугольная.
Предпочтительно основание 131 содержит несколько роликов, посредством которых оно может перемещаться по полотну 2 проезжей части. Основание 131 имеет несколько опорных ног 17-17''', которыми оно устанавливается на полотно 2 проезжей части. После того, как основание 131 опорными ногами 17-17''' установлено на полотно 2 проезжей части, оно больше не может двигаться по полотну 2 проезжей части. Предпочтительно основание 131 стоит на полотне 2 проезжей части посредством четырех опорных ног 17-17'''. Эти четыре опорные ноги 17-17''' расположены в четырех углах прямоугольного основания 131.
Для устойчивой фиксации основания 131 на полотне 2 проезжей части устройство 1 может быть снабжено фиксирующими утяжелителями. Предпочтительно устройство 1 содержит несколько консолей 18-18''', посредством которых само основание 131 и/или опорные ноги 17-17''' снабжаются фиксирующими утяжелителями. На Фиг.3 на каждую опорную ногу 17-17''' укладывается по консоли 18-18'''. Консоли 18-18''' снабжены не показанными на чертеже фиксирующими утяжелителями. В качестве фиксирующих утяжелителей могут использоваться данное транспортировочное средство и сопровождающее транспортное средство, которые устанавливаются на эти консоли 18-18'''. В порядке альтернативы и дополнения к консолям 18-18''' основание 131 может устойчиво фиксироваться на полотне 2 проезжей части также посредством вакуума между опорными ногами 17-17''' и полотном 2 проезжей части. Для этого каждая опорная нога 17-17''' на обращенной к полотну 2 проезжей части стороне имеет уплотнение, которое газонепроницаемо герметизирует полость между опорной ногой 17-17''' и полотном 2 проезжей части. С помощью вакуум-насоса 26 в каждой полости создается вакуум. Вакуум измеряется вакуумметром 27. Вакуумметр 27 выдает электрические сигналы, соответствующие величине измеренного вакуума. Вакуум менее 700 мбар присасывает опорные ноги 17-17''' к полотну 2 проезжей части с силой в несколько кН на опорную ногу 17-17'''. Таким образом создается достаточно большая противодействующая сила, чтобы скомпенсировать эталонную силу, так что основание 131 устойчиво зафиксировано на полотне 2 проезжей части. Подробно это показано на схематичном изображении устройства 1 на Фиг.9.
Направление, в котором калибруется WIM датчик 3, называется калибровочным направлением. На Фиг.1 калибровочное направление проходит параллельно направлению перемещения; датчик 3 калибруется вдоль направления перемещения. На Фиг.2 калибровочное направление параллельно продольному направлению датчика; датчик 3 калибруется вдоль продольного направления датчика. На Фиг.1-4 калибровочное направление обозначено жирной стрелкой. Путь, вдоль которого датчик 3 калибруется в калибровочном направлении, называется калибровочным путем 14. На Фиг.1 и Фиг.2 калибровочный путь 14 обозначен штрихпунктирно. Калибровочный путь 14 окружен рамой 13. Калибровка встроенного в полотно 2 проезжей части WIM датчика 3 происходит, таким образом, внутри рамы 13.
Продольная балка 132 проходит параллельно калибровочному пути 14. Для позиционирования калибровочного пути 14 относительно места установки WIM датчика 3 рама 13 имеет направляющую 133. Направляющая 133 расположена между продольной балкой 132 и основанием 131. Продольная балка 132 с помощью направляющей 133 установлена подвижно относительно основания 131. На Фиг.5 это показано подробно. Направляющая 133 имеет по меньшей мере одни салазки, которые установлены подвижно перпендикулярно калибровочному направлению. Предпочтительно эти салазки перемещаются по профилю. Продольная балка 132 на этих салазках может перемещаться перпендикулярно калибровочному направлению на +/-100 мм относительно основания 131, стоящего в месте установки WIM датчика 3. Это показано на Фиг.5 длинной двойной стрелкой. С помощью фиксирующего рычага салазки могут вручную устанавливаться в желаемом положении. Направляющая 133 имеет по меньшей мере одну продольную установку, посредством которой продольная балка 132 может перемещаться в калибровочном направлении и против него. Такая продольная установка предпочтительно состоит из двух профилей, которые лежат друг на друге и подвижны относительно друг друга. С помощью резьбовых соединений оба профиля могут устанавливаться в желаемое положение. Продольная балка 132 может перемещаться с этой продольной установкой на +/-10 мм относительно основания 131, стоящего в месте установки WIM датчика 3, в калибровочном направлении. На Фиг.5 это показано короткой двойной стрелкой. Продольная балка 132 может двигаться с этой продольной установкой и под острым углом к калибровочному направлению. С помощью направляющей 133 продольная балка 132 может перемещаться относительно желаемого положения с точностью менее 1,0 мм и позиционироваться относительно места установки WIM датчика 3.
Устройство 1 содержит по меньшей мере один датчик 16, 16' положения, чтобы определять положение калибровочного пути 14 относительно места установки WIM датчика 3. Предпочтительно датчик 16, 16' положения представляет собой источник оптического излучения, такой как светодиод, лазерный диод и т.д. Датчик 16, 16' положения посылает видимый луч света диаметром менее 1,0 мм. Предпочтительно датчик 16, 16' положения жестко закреплен на продольной балке 132, и проекция луча света на полотно 2 проезжей части определяет положение калибровочного пути 14. Продольная балка 132 перемещается, чтобы проекция луча света упала на место установки WIM датчика 3. На Фиг.3 и Фиг.4 два датчика 16, 16' положения закреплены на продольной балке 132 с пространственным разнесением друг от друга. Проекции лучей света от этих двух датчиков 16, 16' положения на полотне 2 проезжей части пространственно отделены друг от друга и задают два пространственно отделенных друг от друга положения калибровочного пути 14. Предпочтительно проекция луча света первого датчика 16 положения задает начальное положение калибровочного пути 14 на полотне 2 проезжей части, а проекция луча света второго датчика 16' положения задает конечное положение калибровочного пути 14 на полотне 2 проезжей части. Если же обе эти проекции лучей света падают на место установки WIM датчика 3, то начальное положение и конечное положение калибровочного пути 14 регистрируются относительно места установки WIM датчика 3. Определение положения калибровочного пути 14 относительно места установки WIM датчика 3 осуществляется с точностью менее 1,0 мм. Зная существо данного изобретения, специалист может предусмотреть и больше чем два датчика положения. Специалист может также предусмотреть только один датчик положения, который установлен на продольной балке подвижно вдоль направляющей датчика и, таким образом перемещаясь по направляющей датчика, задает в нескольких пространственно отделенных друг от друга позициях на продольной балке пространственно разнесенные друг от друга положения калибровочного пути.
Исполнительное устройство 11 вырабатывает эталонную силу, которой калибруется WIM датчик 3. Предпочтительно исполнительное устройство 11 представляет собой пневматический цилиндр. К тому же устройство 1 содержит пневматический насос 19, пневматический клапан 20 и пневматический блок 21 управления, что схематично показано на Фиг.8. Пневматический насос 19 вырабатывает сжатый воздух. Через пневматический клапан 20 сжатый воздух попадает в подводящую линию; пневматический клапан 20 может открывать и закрывать доступ сжатого воздуха в подводящую линию. Пневматический цилиндр нагружается сжатым воздухом. Пневматический блок 21 управления регулирует количество и продолжительность этого воздействия. Путем подачи нагрузки на пневматический цилиндр создается эталонная сила. Предпочтительно эталонная сила составляет от 100 Н до 10 кН. Эталонная сила создается с точностью менее 0,01%. Эталонная сила с такой точностью остается постоянной в течение от 1 мсек до 100 сек.
Датчик 12 силы регистрирует эту эталонную силу. Предпочтительно пневматический цилиндр воздействует непосредственно на датчик 12 силы. Предпочтительно датчик 12 силы представляет собой пьезоэлектрический датчик силы, который выдает электрические сигналы, пропорциональные величине зарегистрированной эталонной силы. Датчик 12 силы регистрирует эталонную силу с точностью менее 0.01% и с временным разрешением менее 1 кГц. Точность при создании эталонной силы, а также при регистрации этой эталонной силы, таким образом, по меньшей мере на порядок выше, чем рекомендованная в стандарте OIML R-134 точность при определении общего веса едущего транспортного средства.
Предпочтительно указанное устройство содержит по меньшей мере один датчик 22-22''' возмущающей силы. Этот датчик 22-22''' возмущающей силы закреплен на раме 13 и регистрирует возмущающую силу. Возмущающая сила - это сила, которая при калибровке встроенного в полотно 2 проезжей части WIM датчика 3 воздействует на раму 13. Эта возмущающая сила может быть вибрацией, которая исходит от приводного устройства 10. Возмущающая сила может быть также силой реакции, вызываемой прокатыванием колеса аппликатора 15, 15' по полотну 2 проезжей части. Возмущающая сила может быть вызвана также механическими ударами при прокатывании колеса аппликатора 15, 15' по неровностям на полотне 2 проезжей части. На Фиг.2-5 четыре датчика 22-22''' возмущающей силы закреплены в области направляющей 133 между продольной балкой 132 и основанием 131. Датчик 22-22''' возмущающей силы предпочтительно тоже является пьезоэлектрическим датчиком силы, который выдает электрический сигнал, пропорциональный величине измеренной возмущающей силы. Эти четыре датчика 22-22''' возмущающей силы установлены на раме 13 с пространственным разнесением друг от друга и образуют динамометр. Этот динамометр измеряет не только несколько компонентов возмущающей силы, но и несколько компонентов возмущающего момента. Датчик 22-22''' возмущающей силы регистрирует возмущающую силу с точностью менее 0.01% и с временным разрешением менее 1 кГц. Зная существо изобретения, специалист вместо закрепленного на раме датчика возмущающей силы может использовать закрепленный на калибровочной тележке датчик возмущающей силы в форме динамометра.
Устройство 1 содержит по меньшей мере один аппликатор 15-15'' для приложения эталонной силы к полотну 2 проезжей части. Предпочтительно пневматический цилиндр воздействует непосредственно на аппликатор 15-15''. Исполнительное устройство 11, датчик 12 силы и аппликатор 15-15'' механически связаны друг с другом и образуют транспортное средство (тележку) 5-5''. На Фиг.6-8 показаны три варианта выполнения транспортного средства 5-5'' с различными аппликаторами 15-15''. По Фиг.6 аппликатор 15 выполнен ширококолесным с широким колесом. Ширина колеса составляет от 100 мм до 200 мм. Ширина этого колеса, таким образом, явно больше, чем ширина WIM датчика 3 в направлении перемещения. Ширина колеса также явно больше, чем расстояния между пьезоэлектрическими приемными элементами в WIM датчике 3. На Фиг.7 аппликатор 15' выполнен узкоколесным с узким колесом. Это узкое колесо имеет ширину от 30 мм до 50 мм. Это узкое колесо, тем самым, имеет такую же ширину, что и WIM датчик 3 в направлении перемещения. Это узкое колесо также ẏже, чем расстояния между пьезоэлектрическими приемными элементами в WIM датчике 3. Аппликатор 15'' по Фиг.8 выполнен штампообразным с прямоугольным штампом. В поперечнике штамп составляет от 30 мм до 50 мм. Поперечник штампа, таким образом, имеет такую же величину, что и ширина WIM датчика 3 в направлении перемещения. Поперечник штампа ẏже, чем расстояния между пьезоэлектрическими приемными элементами в WIM датчике 3.
Транспортное средство 5-5'' относительно полотна 2 проезжей части расположено под продольной балкой 132. Продольная балка 132 имеет направляющий рельс, и транспортное средство 5-5'' может перемещаться в направляющем рельсе вдоль калибровочного пути 14. Транспортное средство 5-5'' может перемещаться в окруженной основанием 131 области поверхности полотна 2 проезжей части. Люди, находящиеся на полотне 2 проезжей части, пространственно отделены этим основанием 131 от транспортного средства 5-5'', благодаря чему людям обеспечивается безопасность при калибровке WIM датчика 3.
Устройство 1 содержит приводное устройство 10 для перемещения транспортного средства 5-5''. Предпочтительно приводное устройство 10 представляет собой электрический привод, например, асинхронный двигатель. Приводное устройство 10 регулируется управляющим блоком 28 привода. На Фиг.5 приводное устройство 10 закреплено на одном конце продольной балки 132 и посредством ремня механически соединено с транспортным средством 5-5''. Вращение вала приводного устройства 10 тем самым преобразуется в поступательное движение транспортного средства 5-5''. Создаваемая посредством приводного устройства 10 приводная сила с помощью ремня передается на транспортное средство 5-5''. Предпочтительно транспортное средство 5-5'' со скоростью до 1,0 м/сек перемещается вдоль калибровочного пути 14. Предпочтительно транспортное средство 5-5'' разгоняется с ускорением и тормозится до 1,0 м/сек2 вдоль калибровочного пути 14.
Таким образом, за счет непрерывного прокатывания колеса аппликатора 15, 15' эталонная сила непрерывно прикладывается вдоль калибровочного пути 14 к полотну 2 проезжей части, или эта эталонная сила за счет дискретного контактирования штампа аппликатора 15'' вдоль калибровочного пути 14 дискретно прикладывается к полотну 2 проезжей части. При дискретном приложении эталонной силы штамп аппликатора 15'' позиционируется вдоль калибровочного пути 14 в нескольких калибровочных положениях. Эти калибровочные положения находятся на предварительно заданном расстоянии друг от друга. Предпочтительно эталонная сила прикладывается к полотну 2 проезжей части только в этих калибровочных положениях. Аппликатор 15'' перемещается от одного калибровочного положения к следующему без приложения эталонной силы. Таким образом, штамп аппликатора 15'' позиционируется на пьезоэлектрических приемных элементах WIM датчика 3, и пьезоэлектрические приемные элементы по отдельности калибруются предварительно заданным скачкообразным изменением эталонной силы. Это скачкообразное изменение эталонной силы состоит из нескольких эталонных сил разной величины. Предпочтительно величина эталонных сил одного скачкообразного изменения эталонной силы варьируется в пределах одного порядка. Скачкообразное изменение эталонной силы варьируется с повышением и/или с понижением. Тем самым, для каждого пьезоэлектрического приемного элемента характерны чувствительность, линейность и гистерезис.
Предпочтительно приводное устройство 10 содержит инкрементный датчик 110, который устанавливается на валу приводного устройства 10 и регистрирует угловые положения вала при перемещении транспортного средства 5-5'' вдоль калибровочного пути 14. Инкрементный датчик 110 регистрирует угловые положения с разрешением по угловым координатам менее 1 градуса и временным разрешением менее 1 кГц. Перемещение транспортного средства 5-5'' вдоль калибровочного пути 14 может быть измерено с точностью локализации менее 1,0 мм. Для определения эталонного положения для инкрементного датчика 110 транспортное средство 5-5'' перемещается к датчику положения в начале или в конце калибровочного пути 14. Датчик положения регистрирует это транспортное средство 5-5'' в эталонном положении на калибровочном пути 14. Датчик положения может представлять собой индуктивный чувствительный элемент, магнитный чувствительный элемент, механический упор и т.д. Инкрементный датчик 110 выдает электрические сигналы, соответствующие измеренным угловым положениям. Датчик положения выдает электрический сигнал, соответствующий измеренному эталонному положению. Путем оценки угловых положений, измеренных в различные моменты времени в различных положениях калибровочного пути 14, регистрируется перемещение транспортного средства 5-5'' в привязке к положению и ко времени. Путем оценки измеренного эталонного положения осуществляется абсолютное позиционирование транспортного средства 5-5'' вдоль калибровочного пути 14.
Предпочтительно транспортное средство 5-5'' содержит по меньшей мере один датчик 9 профиля поверхности. Датчик 9 профиля поверхности контролирует профиль поверхности полотна 2 проезжей части вдоль калибровочного пути 14. Профиль поверхности характеризуется выпучиваниями или впадинами в поверхности полотна 2 проезжей части. Датчик 9 профиля поверхности жестко закреплен на транспортном средстве 5-5''. Датчик 9 профиля поверхности содержит по меньшей мере один источник оптического излучения, например, лазерный диод, светодиод и т.д. Этот оптический датчик направлен на калибровочный путь 14 и посылает луч света на этот калибровочный путь 14. Луч света отражается от поверхности полотна 2 проезжей части на калибровочном пути 14. Датчик 9 профиля поверхности содержит по меньшей мере один фотодетектор, например, фотодиод, фоторезистор и т.д. Фотодетектор тоже направлен на калибровочный путь 14 и регистрирует отправленный луч света, отраженный от поверхности полотна 2 проезжей части на калибровочном пути 14. Если удаленность датчика 9 профиля поверхности от поверхности полотна 2 проезжей части на калибровочном пути 14 меняется из-за выпучиваний или впадин в поверхности полотна 2 проезжей части, то меняется и угол, под которым регистрируется этот отраженный посланный луч света. При перемещении транспортного средства 5-5'' вдоль калибровочного пути 14 датчик 9 профиля поверхности регистрирует, таким образом, изменение удаленности с разрешением удаленности менее 1 мм и с временным разрешением менее 1 кГц. Датчик 9 профиля поверхности выдает электрические сигналы, соответствующие определяемому изменению удаленности. Путем оценки изменения удаленности, фиксируемой в различных позициях калибровочного пути 14, с высокой точностью определяется профиль поверхности полотна 2 проезжей части вдоль калибровочного пути 14. Если профиль поверхности обнаруживает выпучивания или впадины, которые больше, чем предварительно заданная величина выпучивания, то может возникнуть необходимость в дополнительной обработке места установки WIM датчика 3 в полотне 2 проезжей части. Профиль поверхности полотна 2 проезжей части может регистрироваться в двух или в трех измерениях. При двухмерном профиле поверхности изменение удаленности от поверхности полотна 2 проезжей части регистрируется по линии вдоль калибровочного направления. При трехмерном профиле поверхности изменение удаленности от поверхности полотна 2 проезжей части регистрируется по ширине полотна 2 проезжей части вдоль калибровочного направления. Предпочтительно ширина полотна 2 проезжей части по меньшей мере такая же, как и ширина WIM датчика 3.
По меньшей мере один блок 25, 25' электропитания производит электрический ток для устройства 1, так что оно может эксплуатироваться автономно. Предпочтительно первый блок 25 электропитания производит трехфазный электрический ток для пневматического насоса 19 и вакуум-насоса 26, тогда как второй блок 25' электропитания вырабатывает однофазный ток для приводного устройства 10, управляющего блока 28 привода, блока 30 сбора и регистрации данных и вычислительного блока 31. Детально это показано на схематичном изображении устройства 1 на Фиг.9.
С помощью стартера 29 запускается и прекращается калибровка встроенного в полотно 2 проезжей части WIM датчика 3. Стартер 29 работает как система «мертвый оператор», где проверяется, на месте ли человек, обслуживающий устройство 1, и в состоянии ли он продолжать работу.
Блок 30 сбора и регистрации данных регистрирует цифровые данные с устройства 4 анализа данных по величине силы веса, измеренной WIM датчиком 3. Блок 30 сбора и регистрации данных регистрирует электрические сигналы с инкрементного датчика 110 об угловом положении вала приводного устройства 10. Блок 30 сбора и регистрации данных регистрирует электрический сигнал от датчика положения об эталонном положении транспортного средства 5-5'' на калибровочном пути 14. Блок 30 сбора и регистрации данных регистрирует электрические сигналы с датчика 9 профиля поверхности об изменении удаленности, зарегистрированном этим датчиком 9 профиля поверхности. Блок 30 сбора и регистрации данных регистрирует электрические сигналы с датчика 12 силы об установленной этим датчиком 12 силы эталонной силе. Блок 30 сбора и регистрации данных регистрирует электрические сигналы от датчика 22-22''' возмущающей силы об измеренной этим датчиком 22-22''' возмущающей силе. Блок 30 сбора и регистрации данных регистрирует электрические сигналы от вакуумметра 27 о величине вакуума, измеренной этим вакуумметром 27. Блок 30 сбора и регистрации данных может усиливать полученные электрические сигналы и преобразовывать в цифровые данные.
Вычислительный блок 31 представляет собой компьютер с памятью для хранения данных и процессором. В память для хранения данных загружена по меньшей мере одна программа анализа, причем эта программа анализа выполняется процессором. Блок 30 сбора и регистрации данных коммуницирует с вычислительным блоком 31. Таким образом блок 30 сбора и регистрации данных передает цифровые данные на вычислительный блок 31, который анализирует их с помощью программы анализа. В этой программе анализа сравниваются цифровые данные о силе веса, определенной WIM датчиком 3, с цифровыми данными об эталонной силе, полученной от датчика 12 силы. С помощью программы анализа по цифровым данным изменений удаленности датчика 9 профиля поверхности от поверхности полотна 2 проезжей части на различных позициях калибровочного пути 14 определяется профиль поверхности полотна 2 проезжей части вдоль калибровочного пути 14.
Программа анализа сравнивает цифровые данные определяемой силы веса с цифровыми данными установленной эталонной силы. Результат сравнения представляет собой калибровочное значение или градуировочную функцию. Программа анализа при таком сравнении учитывает также цифровые данные измеренной возмущающей силы, а также установленный профиль поверхности. Цифровые данные определяемой силы веса сравниваются с цифровыми данными установленной эталонной силы и с цифровыми данными определяемой возмущающей силы, а также с цифровыми данными установленного профиля поверхности. Также определенная сила веса корректируется с учетом профиля поверхности, например, при этом учитываются выпучивания или впадины в профиле поверхности.
Также вычислительный блок 31 передает цифровые данные о перемещении транспортного средства 5-5'' вдоль калибровочного пути 14 на блок 30 сбора и регистрации данных, причем эти цифровые данные в блоке 30 сбора и регистрации данных преобразуются в электрические сигналы. Блок 30 сбора и регистрации данных передает на управляющий блок 28 привода электрические сигналы для перемещения транспортного средства 5-5'' вдоль калибровочного пути 14 с помощью приводного устройства 10. Так, он передает электрические сигналы на управляющий блок 28 привода для запуска и прекращения перемещения транспортного средства 5-5''.
Предпочтительно заделанный в полотно 2 проезжей части WIM датчик 3 калибруется по меньшей мере один раз с калибровочным направлением, параллельным направлению перемещения, и по меньшей мере один раз с калибровочным направлением, параллельным продольному направлению датчика. Предпочтительно заделанный в полотно 2 проезжей части WIM датчик 3 калибруется в растре, состоящем из нескольких калибровочных путей 14. Эти калибровочные пути 14 проходят в этом растре параллельно друг другу и на расстоянии от 20 мм до 200 мм друг от друга.
При калибровочном направлении, параллельном направлению перемещения, WIM датчик 3 калибруется, например, десятью пьезоэлектрическими приемными элементами, расстояние между которыми составляет 100 мм, предпочтительно в растре из калибровочных путей 14, расстояние между которыми составляет 50 мм. Таким образом, калибруется каждый пьезоэлектрический приемный элемент, в то время как устройство 1 в направлении перемещения в одной области проезжает по этому WIM датчику 3, где расположен пьезоэлектрический приемный элемент; здесь пьезоэлектрический приемный элемент измеряет большую силу веса. К тому же, каждый пьезоэлектрический приемный элемент калибруется, в то время как устройство 1 в направлении перемещения в одной области между двумя соседними пьезоэлектрическими приемными элементами проезжает по этому WIM датчику 3, и здесь оба пьезоэлектрических приемных элемента измеряют одинаковые по величине силы веса.
При калибровочном направлении, параллельном продольному направлению датчика, WIM датчик 3 с шириной 40 мм предпочтительно калибруется в растре из калибровочных путей 14, расстояние между которыми составляет 40 мм. Так этот WIM датчик 3 калибруется за счет того, что устройство 1 в продольном направлении датчика провозится точно по месту установки этого WIM датчика 3; здесь WIM датчик 3 измеряет большую силу веса, а также каждый из пьезоэлектрических приемных элементов измеряет большую силу веса. И к тому же, WIM датчик 3 калибруется за счет того, что устройство 1 в продольном направлении датчика перемещается на расстоянии 40 мм от места установки этого WIM датчика 3; здесь WIM датчик 3 замеряет небольшую силу веса, а также каждый из пьезоэлектрических приемных элементов замеряет небольшую силу веса.
Перечень ссылочных обозначений
1 - устройство
2 - полотно проезжей части
3 - WIM датчик (датчик динамического контроля веса)
4 - устройство анализа данных
5-5''-транспортное средство
9 - датчик профиля поверхности
10 - приводное устройство
11 - исполнительное устройство
12 - датчик силы
13 - рама
14 - калибровочный путь
15-15''-аппликатор
16,16'-датчик положения
17-17'''-опорная нога
18-18'''-консоль
19 - пневматический насос
20 - пневматический клапан
21 - пневматический блок управления
22-22'''-датчик возмущающей силы
25,25' - блок электропитания
26 - вакуум-насос
27 - вакуумметр
28 - управляющий блок привода
29 - стартер
30 - блок сбора и регистрации данных
31 - вычислительный блок
110 - инкрементный датчик
131 - основание
132 - продольная балка
133 - направляющая
Устройство для измерения ускорения и способ изготовления такого устройства для измерения ускорения
Устройство для измерения ускорения и способ изготовления такого устройства для измерения ускорения
Wim-датчик, имеющий узел датчика
Wim-датчик, имеющий узел датчика

