Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ПЕРЕКАЧИВАНИЯ ТЕКУЧЕЙ СРЕДЫ И УПРАВЛЕНИЯ ТАКИМ ПЕРЕКАЧИВАНИЕМ
Вид РИД
Изобретение
Область техники
Изобретение относится, в общем, к различным системам перекачивания текучей среды и к способам управления таким перекачиванием. Более конкретно, изобретение относится к управлению насосом с регулируемой частотой вращения и/или регулируемым крутящим моментом по меньшей мере с одним приводным устройством для текучей среды и по меньшей мере одним пропорциональным регулирующим клапаном в системе.
Предшествующий уровень техники
Системы, в которых перекачивается текучая среда, применяются в различных областях, таких как тяжелые и промышленные машины, химическая промышленность, пищевая промышленность, медицинская промышленность, торговое оборудование и применение в быту, и это лишь некоторые из них. Поскольку характеристики насосной системы могут изменяться в зависимости от применения, для краткости предпосылки создания изобретения будут описаны на основе обобщенного применения гидравлических систем, обычно используемых в тяжелых и промышленных машинах. В таких машинах гидравлические системы могут быть использованы в устройствах в диапазоне от малых до больших нагрузок, например в экскаваторах, фронтальных погрузчиках, кранах и гидростатических трансмиссиях, и это лишь некоторые из них. В зависимости от типа системы обычная машина с гидравлической системой обычно содержит многие узлы, такие как гидравлический привод (например, гидроцилиндр, гидравлический двигатель или другой тип привода, который выполняет работу на внешней нагрузке), гидронасос (включая двигатель и зубчатую передачу) и резервуар текучей среды. Двигатель приводит в действие зубчатую передачу для подачи перекачиваемой текучей среды из резервуара текучей среды в гидравлический привод в заданном режиме. Например, когда гидравлический привод представляет собой гидравлический цилиндр, текучая среда из насоса вынуждает шток поршня цилиндра перемещаться в корпусе цилиндра. В случае, когда гидравлический привод представляет собой гидравлический двигатель, текучая среда из насоса вынуждает гидравлический двигатель, например, вращаться и приводить в действие приложенную нагрузку.
Как правило, инерция гидронасоса в вышеописанных промышленных областях применения делает непрактичным изменение частоты вращения гидронасоса для точного регулирования расхода в системе. То есть, насосы существующего уровня техники в таких промышленных машинах не очень чувствительны к изменениям в потребности расхода. Таким образом, для регулирования расхода в системе, систему дополняют устройствами регулирования расхода, такими как гидронасос с регулируемым рабочим объемом и/или клапан регулирования направленного потока, и гидронасос работает с постоянной скоростью для гарантии того, что в устройствах регулирования расхода всегда поддерживается соответствующее давление. Гидронасос может работать на полной скорости или на некоторой другой постоянной скорости, которая гарантирует, что система всегда имеет необходимое давление для устройств регулирования расхода в системе. Однако работа гидронасоса на полной скорости или на некоторой другой постоянной скорости является неэффективной, так как не учитывает истинную потребность в подводе энергии системы. Например, насос будет работать на полной скорости даже тогда, когда нагрузка системы составляет всего 50%. Кроме того, в устройствах регулирования расхода в этих системах обычно используют гидравлические регуляторы, которые могут быть относительно сложными и требуют для функционирования дополнительной текучей среды.
Из-за сложности гидравлических схем и регуляторов эти гидравлические системы, как правило, имеют разомкнутый контур, в котором насос извлекает текучую среду из большого резервуара текучей среды, и текучая среда отправляется обратно в резервуар после выполнения работы на гидравлическом приводе и после использования в гидравлических регуляторах. То есть, текучая среда, выходящая из гидравлического привода и гидравлических регуляторов, не направляется непосредственно на вход насоса, как в системе с замкнутым контуром. Система с разомкнутым контуром с большим резервуаром текучей среды необходима в этих системах для поддержания температуры текучей среды на приемлемом уровне и для обеспечения соответствующей подачи текучей среды для насоса, чтобы предотвратить кавитацию, и для гидравлического управления различными компонентами. Хотя известны схемы с замкнутым контуром, они, как правило, предназначены для простых систем, где риск кавитации насоса минимальный. Однако в системах с разомкнутым контуром различные компоненты часто расположены на расстоянии друг от друга. Для взаимосвязи этих узлов используют различные дополнительные компоненты, такие как соединительные валы, шланги, трубы и или арматуру сложным образом, и что обеспечивает подверженность загрязнению. Кроме того, эти компоненты чувствительны к повреждениям или ухудшению качества в неблагоприятных условиях работы, что приводит к увеличению времени простоя машины и снижает надежность машины. Таким образом, известные системы имеют нежелательные недостатки в отношении сложности и надежности систем.
Дополнительные ограничения и недостатки обычных, традиционных и предлагаемых решений будут очевидны специалисту в данной области при сравнении таких решений с вариантами осуществления изобретения, которые изложены в остальной части описания со ссылками на чертежи.
Раскрытие изобретения
Предпочтительные варианты осуществления изобретения обеспечивают более быстрое и более точное регулирование расхода текучей среды и/или давления в системах, в которых используются насосы с регулируемой частотой вращения или регулируемым крутящим моментом. Система перекачивания текучей среды и способ управления такой системой, описываемый далее, особенно предпочтительны в системах с замкнутым контуром, поскольку более быстрое и более точное регулирование расхода текучей среды и/или давления в таких системах может означать меньшие размеры аккумулятора и уменьшенный риск кавитации насоса, чем в обычных системах. В примере варианта осуществления система для текучей среды содержит насос с регулируемой частотой вращения и/или регулируемым крутящим моментом, по меньшей мере один узел пропорционального регулирующего клапана, исполнительный механизм, управляемый текучей средой для управления нагрузкой, и устройство управления для одновременного установления частоты вращения и/или крутящего момента и открытия по меньшей мере одного узла пропорционального регулирующего клапана. Насос содержит по меньшей мере одно приводное устройство для текучей среды, которое подает текучую среду к исполнительному механизму, который может быть, например, цилиндром с приводом от текучей среды, двигателем с приводом от текучей среды другим типом исполнительного механизма с приводом от текучей среды, который управляет нагрузкой (например, стрелой экскаватора, гидростатической трансмиссией или некоторым другим оборудованием или устройством, которым может управлять привод). Понятие «текучая среда» относится к жидкости или смеси жидкости и газа, содержащей, главным образом, жидкость, в объемном соотношении. Каждое из приводных устройств для текучей среды содержит первичный привод и узел перемещения текучей среды. Узел перемещения текучей среды может приводиться в действие от первичного привода, так что текучая среда перемещается от впускного отверстия к выпускному отверстию насоса. В некоторых вариантах осуществления узел пропорционального регулирующего клапана расположен между впускным отверстием насоса и выпускным отверстием привода. Узел пропорционального регулирующего клапана может содержать пропорциональный регулирующий клапан и исполнительный механизм клапана. В некоторых вариантах осуществления узел пропорционального регулирующего клапана расположен между выпускным отверстием исполнительного механизма и выпускным отверстием насоса. В других вариантах осуществления система содержит два узла пропорционального регулирующего клапана, с одним узлом пропорционального регулирующего клапана, расположенным между выпускным отверстием насоса и впускным отверстием исполнительного механизма, и другим узлом пропорционального регулирующего клапана, расположенным между выпускным отверстием привода и впускным отверстием насоса. Устройство управления одновременно устанавливает частоту вращения и/или крутящий момент первичного привода и открытие пропорционального регулирующего клапана по меньшей мере в одном узле пропорционального регулирующего клапана, таким образом, чтобы регулировать расход и/или давление в системе текучей среды.
В некоторых вариантах осуществления узел перемещения текучей среды содержит первый элемент перемещения текучей среды и второй элемент перемещения текучей среды. Первый элемент перемещения текучей среды приводится в действие от первичного привода и, при приведении в действие, первый элемент перемещения приводит в действие второй элемент перемещения текучей среды. При приведении в действие, первый и второй элементы перемещения текучей среды перемещают текучую среду от впускного отверстия насоса к выпускному отверстию насоса. В зависимости от конструкции один или оба элемента перемещения текучей среды могут работать в сочетании с неподвижным элементом, например, стенкой насоса, серповидным разделительным элементом или другим подобным компонентом, при перемещении текучей среды. Первый и второй элементы перемещения текучей среды могут быть, например, шестерней с внешним зацеплением зубьев шестерни, втулкой (например, диск, цилиндр или другой аналогичный компонент) с выступами (например, выпуклости, удлинения, вздутия, возвышения, другие аналогичные структуры или их сочетания), втулкой (например, диск, цилиндр или другой аналогичный компонент) с выемками (например, полости, впадины, пустоты или аналогичные структуры), телом шестерни с выступами, или другими аналогичными структурами, которые могут перемещать текучую среду, когда приводятся в действие.
В некоторых вариантах осуществления насос содержит два приводных устройства для текучей среды, причем каждое приводное устройство для текучей среды содержит первичный привод и узел перемещения текучей среды, который содержит элемент перемещения текучей среды. Элемент перемещения текучей среды в каждом приводном устройстве для текучей среды приводится независимо от соответствующего первичного привода. Каждый элемент перемещения текучей среды имеет по меньшей мере одно из множества выступов и множества выемок. То есть, как в описанном выше варианте осуществления, каждый элемент перемещения текучей среды может быть, например, шестерней с внешним зацеплением зубьев шестерни, втулкой (например, диск, цилиндр или другой аналогичный компонент) с выступами (например, выпуклости, удлинения, вздутия, возвышения, другие аналогичные структуры или их сочетания), втулкой (например, диск, цилиндр или другой аналогичный компонент) с выемками (например, полости, впадины, пустоты или аналогичные структуры), телом шестерни с выступами, или другими аналогичными структурами, которые могут перемещать текучую среду, когда приводятся в действие. Конфигурация элементов перемещения текучей среды в насосе не обязательно идентична. Например, один элемент перемещения текучей среды может быть выполнен как шестеренчатый элемент перемещения текучей среды с внешним зацеплением, а другой элемент перемещения текучей среды может быть выполнен как шестеренчатый элемент перемещения текучей среды с внутренним зацеплением. Элементы перемещения текучей среды имеют независимое управление, например, от электродвигателя, гидравлического двигателя или другого двигателя с приводом от текучей среды, двигателя внутреннего сгорания, газового или другого типа двигателя, или другого аналогичного устройства, которое может независимо управлять своим элементом перемещения текучей среды. «Независимо управлять», «независимо управляемый», «независимо приводить в действие» и «независимо приводимый» означает, что каждый элемент перемещения текучей среды, например шестерня, управляется/приводится посредством собственного первичного привода, например электродвигателя, в конфигурации один к одному. Однако приводные устройства для текучей среды являются управляемыми устройством управления таким образом, что контакт между приводными устройствами для текучей среды синхронизирован, например, чтобы перекачивать текучую среду и/или уплотнять обратный путь потока. То есть, вместе с одновременно устанавливаемой частотой вращения и/или крутящим моментом первичного привода и открытием пропорционального регулирующего клапана по меньшей мере в одном узле пропорционального регулирующего клапана, работа приводных устройств для текучей среды с независимым управлением синхронизируется устройством управления, так что элемент перемещения текучей среды в каждом приводном устройстве для текучей среды образует синхронизированный контакт с другим элементом перемещения текучей среды. Контакт может включать в себя по меньшей мере одну точку контакта, линию контакта или участок контакта.
Другой вариант включает в себя систему, которая имеет гидронасос, по меньшей мере один узел пропорционального клапана и устройство управления. Гидронасос подает текучую среду к гидравлическому исполнительному механизму. В некоторых вариантах осуществления гидравлический исполнительный механизм представляет собой гидроцилиндр, а в других вариантах осуществления гидравлический исполнительный механизм представляет собой гидравлический двигатель. Естественно, изобретение не ограничено указанными примерами, и могут быть использованы другие типы гидравлических исполнительных механизмов, которые управляют нагрузкой. Гидронасос содержит по меньшей мере один двигатель и зубчатую передачу. Зубчатая передача может приводиться в действие по меньшей мере от одного двигателя, так что текучая среда перемещается от впускного отверстия насоса к выпускному отверстию насоса. Каждый узел пропорционального регулирующего клапана содержит пропорциональный регулирующий клапан и исполнительный механизм клапана для управления пропорциональным регулирующим клапаном. В некоторых вариантах осуществления пропорциональный регулирующий клапан расположен между выпускным отверстием насоса и впускным отверстием гидравлического исполнительного механизма. В некоторых вариантах осуществления пропорциональный регулирующий клапан расположен между выпускным отверстием гидравлического исполнительного механизма и впускным отверстием насоса. В других вариантах осуществления гидравлическая система может содержать два пропорциональных регулирующих клапана. В данном варианте осуществления один из пропорциональных регулирующих клапанов может быть расположен между выпускным отверстием насоса и впускным отверстием гидравлического исполнительного механизма, а другой пропорциональный регулирующий клапан может быть расположен между выпускным отверстием гидравлического исполнительного механизма и впускным отверстием насоса. Устройство управления одновременно устанавливает частоту вращения и/или крутящий момент по меньшей мере одного двигателя и открытие пропорционального регулирующего клапана или клапанов таким образом, чтобы управлять расходом и/или давлением в гидравлической системе.
Раскрытие сущности изобретения представлено как общее введение к некоторым вариантам осуществления, и не предназначено для ограничения какой-либо конкретной конфигурации системы текучей среды или гидравлической системы. Должно быть понятно, что различные особенности и конфигурации особенностей, описанных в разделе «Раскрытие изобретения», могут быть объединены любым подходящим способом, чтобы формировать любое число вариантов осуществления. Раскрыты некоторые дополнительные примеры вариантов осуществления, включающие варианты и альтернативные конфигурации.
Краткое описание чертежей
Чертежи составляют часть описания, поясняют примеры вариантов осуществления изобретения, и, вместе с общим описанием, приведенным выше, и подробным описанием, приведенным далее, предназначены для пояснения особенностей предпочтительных вариантов осуществления изобретения.
На фиг. 1 приведена схема, поясняющая систему текучей среды согласно примеру варианта осуществления;
на фиг. 2 – регулирующий клапан согласно примеру варианта осуществления, который может быть использован в системе на фиг. 1;
на фиг. 3 – шестеренный насос согласно примеру варианта осуществления, который может быть использован в системе на фиг. 1;
на фиг. 4 – шестеренный насос согласно примеру варианта осуществления в разобранном виде, который может быть использован в системе на фиг. 1;
на фиг. 5 – шестеренный насос с внешним зацеплением на фиг. 4, вид сверху в поперечном разрезе;
на фиг. 5A – шестеренный насос с внешним зацеплением, вид сбоку в разрезе по линии A-A на фиг. 5;
на фиг. 5B – шестеренный насос с внешним зацеплением, вид сбоку в разрезе по линии В-В на фиг. 5;
на фиг. 6 – траектории потока текучей среды, перекачиваемой шестеренным насосом с внешним зацеплением на фиг. 4, согласно примеру;
на фиг. 6A – односторонний контакт между двумя шестернями в зоне контакта в шестеренном насосе с внешним зацеплением на фиг. 4, вид в поперечном разрезе.
Варианты осуществления изобретения
Примеры вариантов осуществления изобретения относятся к системам, в которых текучая среда перекачивается с использованием насоса с регулируемой частотой вращения и/или регулируемым крутящим моментом и по меньшей мере одним пропорциональным регулирующим клапаном. Работа насоса и по меньшей мере одного пропорционального регулирующего клапана скоординирована для обеспечения более быстрого и более точного регулирования расхода текучей среды и/или давления, чем в обычных системах. Как подробно описано далее, различные поясняющие варианты осуществления включают в себя конструкции насоса, в которых первичный двигатель приводит в действие узел перемещения текучей среды, который может иметь один или больше элементов перемещения текучей среды. В некоторых поясняющих вариантах осуществления узел перемещения текучей среды имеет два элемента перемещения, и первичный привод приводит в действие один элемент перемещения текучей среды, который, в свою очередь, приводит другой элемент перемещения текучей среды (конструкция ведущий элемент-ведомый элемент). В некоторых поясняющих вариантах осуществления насос содержит больше, чем одно приводное устройство для текучей среды, при этом каждое приводное устройство для текучей среды имеет первичный двигатель и элемент перемещения текучей среды. Элементы перемещения текучей среды приводятся независимо от соответствующих первичных двигателей, таким образом, чтобы синхронизировать контакт между соответствующими элементами перемещения текучей среды (конфигурация ведущий элемент-ведущий элемент). В некоторых вариантах осуществления синхронизированный контакт обеспечивает коэффициент проскальзывания в диапазоне 5% или меньше.
На фиг. 1 показана система текучей среды согласно примеру варианта осуществления. Для краткости система текучей среды будет описана на основе примера применения гидравлической системы. Однако специалистам в данной области будет понятно, что принципы и характеристики, описанные далее, также применимы к системам, которые перекачивают другие (не гидравлические) типы текучих сред. Гидравлическая система 1 содержит гидронасос 10, подающий текучую среду к гидравлическому исполнительному механизму 3, который может представлять собой гидроцилиндр, гидравлический двигатель или другой тип исполнительного механизма с приводом от текучей среды, выполняющим работу на внешней нагрузке. Гидравлическая система 1 также содержит узлы 2010 и 2110 пропорционального регулирующего клапана. Однако в некоторых вариантах осуществления система 1 может быть выполнена так, что содержит только один из узлов 2010 и 2110 пропорционального регулирующего клапана. Гидравлическая система 1 может содержать аккумулятор 170. Узел 2010 пропорционального регулирующего клапана расположен между отверстием B гидронасоса 10 и отверстием B гидравлического исполнительного механизма 3, т. е., узел 2010 клапана сообщается по текучей среде с отверстием B гидронасоса 10 и отверстием B гидравлического исполнительного механизма 3. Узел 2110 регулирующего клапана расположен между отверстием A гидронасоса 10 и отверстием A гидравлического исполнительного механизма 3, т. е., узел 2110 регулирующего клапана сообщается по текучей среде с отверстием A гидронасоса 10 и отверстием A гидравлического исполнительного механизма 3.
Насос 10 согласно примеру варианта осуществления представляет собой насос с регулируемой частотой вращения и регулируемым крутящим моментом. В некоторых вариантах осуществления гидронасос 10 является реверсивным. Гидронасос 10 содержит приводное устройство 13 для текучей среды, которое имеет первичный привод 11 и узел 12 перемещения текучей среды. Первичный привод может представлять собой, например, электродвигатель, гидравлический двигатель или другой двигатель с приводом от текучей среды, двигатель внутреннего сгорания, газовый или другой тип двигателя, или другое аналогичное устройство, которое может независимо управлять своим элементом перемещения текучей среды. На фиг. 1 показано одно приводное устройство 13 для текучей среды согласно примеру варианта осуществления. Однако насос 10 может иметь больше, чем одно приводное устройство для текучей среды. В некоторых вариантах осуществления каждое приводное устройство для текучей среды содержит первичный привод 11 и узел 12 перемещения текучей среды. Узел 12 перемещения текучей среды согласно примеру варианта осуществления имеет элемент перемещения текучей среды, который перемещает текучую среду, когда приводится в действие от первичного привода 11. Элемент перемещения текучей среды может быть, например, втулкой (например, диск, цилиндр или другой аналогичный компонент) с выступами (например, выпуклости, удлинения, вздутия, возвышения, другие аналогичные структуры или их сочетания), втулкой (например, диск, цилиндр или другой аналогичный компонент) с выемками (например, полости, впадины, пустоты или аналогичные структуры), корпусом шестерни с выступами, или другими аналогичными структурами, которые могут перемещать текучую среду, когда приводятся в действие. Первичным приводом 11 управляет блок 266 управления через блок 2022 привода, и первичный привод 11 приводит в действие узел 12 перемещения текучей среды. В некоторых вариантах осуществления первичный привод 11 является реверсивным. Иллюстративный вариант реализации по фиг. 1 содержит два узла 2010, 2110 пропорциональных регулирующих клапанов. Каждый узел 2010, 2110 клапана содержит пропорциональный регулирующий клапан 2014, 2114, соответственно. Регулирующими клапанами 2014, 2114 также управляет блок 266 управления через блок 2022 привода. Регулирующие клапаны 2014, 2114 могут получать команду для полного открытия, полного закрытия, или дросселирования между 0% и 100% от блока 266 управления через блок 2022 привода, используя соответствующее коммуникационное соединение 2025, 2125. В некоторых вариантах осуществления блок 266 управления может поддерживать связь непосредственно с каждым узлом 2010, 2110 регулирующего клапана и гидронасосом 10. Общий источник 2020 энергии может подавать энергию к узлам 2010, 2110 регулирующих клапанов и гидронасосу 10. В некоторых вариантах осуществления узлы 2010, 2110 регулирующих клапанов и гидронасос 10 имеют отдельные источники энергии.
Блок 2022 привода содержит аппаратуру и/или программное обеспечение, которое интерпретирует сигналы команд от блока 266 управления и отправляет соответствующие задающие сигналы к первичному приводу 11 и/или клапанам 2014, 2114. Например, блок 2022 привода может включать в себя кривые насоса и/или кривые первичного привода (например, кривые двигателя, если первичный привод представляет собой электродвигатель), которые являются специфическими для гидронасоса 10, так что сигналы команд от блока 266 управления будут преобразованы в соответствующие задающие сигналы частоты вращения/крутящего момента к гидронасосу 10, в зависимости от конструкции гидронасоса 10. Аналогично, блок 2022 привода может включать в себя кривые клапана и/или кривые исполнительного механизма клапана, которые являются специфическими для регулирующих клапанов 2014, 2114, и сигналы команд от блока 266 управления будут преобразованы в соответствующие задающие сигналы, в зависимости от типа клапана. Кривые насоса/первичного привода и кривые клапана/исполнительного механизма могут быть реализованы в аппаратуре и/или программном обеспечении, например, в виде контуров аппаратуры, алгоритмов и формул программного обеспечения или их сочетания.
В некоторых вариантах осуществления блок 2022 привода может содержать контуры аппаратуры специализированного применения и/или программное обеспечение (например, алгоритмы или другие инструкции или наборы инструкций для выполнения необходимой операции) для управления первичным приводом 11 и/или регулирующими клапанами 2014, 2114. Например, в некоторых вариантах применения гидравлический исполнительный механизм 3 может представлять собой гидроцилиндр, установленный на стреле экскаватора. В таком примере системы блок 2022 привода может включать в себя контуры, алгоритмы, протоколы (например, безопасности, функциональные), справочные таблицы, и т. д., которые являются специфическими для работы стрелы. Таким образом, сигнал команды от блока 266 управления может быть интерпретирован блоком 2022 привода для соответствующего управления первичным приводом 11 и/или регулирующими клапанами 2014, 2114 для позиционирования стрелы в желаемом положении.
Блок 266 управления может принимать данные обратной связи от первичного привода 11. Например, в зависимости от типа первичного привода, блок 266 управления может принимать значения числа оборотов в минуту (об/мин) первичного двигателя, значения скорости, значения частоты, значения крутящего момента, значения тока и напряжения и/или другие данные, связанные с работой первичного привода. Кроме того, блок 266 управления может принимать данные обратной связи от регулирующих клапанов 2014, 2114. Например, блок 266 управления может принимать данные о состоянии открытия и закрытия и/или о состоянии процента открытия регулирующих клапанов 2014, 2114. Кроме того, в зависимости от типа исполнительного механизма клапана, блок 266 управления может принимать сигналы обратной связи, такие как скорость и/или положение исполнительного механизма. Дополнительно блок 266 управления может принимать сигналы обратной связи от параметров процесса, таких как давление, температура, расход или другие параметры, связанные с работой системы 1. Например, каждый узел 2010, 2110 регулирующего клапана может иметь датчики (или приемопередатчики) 2016-2018, 2116-2118, соответственно, для измерения параметров процесса, таких как давление, температура и расход текучей среды. Датчики 2016-2018, 2116-2118 могут поддерживать связь с блоком 266 управления/блоком 2022 привода через коммуникационные соединения 2012, 2112, соответственно. Датчики 2016-2018, 2116-2118 могут находиться либо на стороне, находящейся выше по потоку, либо на стороне, находящейся ниже по потоку от пропорциональных регулирующих клапанов 2014, 2114, по необходимости. В некоторых вариантах осуществления обеспечено два комплекта датчиков для каждого или обоих пропорциональных регулирующих клапанов 2014, 2114, при этом один комплект датчиков расположен на стороне, находящейся выше по потоку, а другой комплект датчиков расположен на стороне, находящейся ниже по потоку. В качестве альтернативы или в дополнение к датчикам 2016-2018, 2116-2118 или дополнительным комплектам датчиков, гидравлическая система 1 может иметь другие датчики в системе для измерения параметров процесса, таких как, например, давление, температура, расход или другие параметры, связанные с работой системы 1.
Как показано на фиг. 1, хотя блок 2022 привода и блок 266 управления показаны как отдельные устройства управления, функции этих блоков могут быть объединены в едином устройстве управления или дополнительно разделены во множестве устройств управления (например, если существует множество приводных устройств для текучей среды и, следовательно, множество первичных приводов, первичные приводы могут иметь общее устройство управления и/или каждый первичный привод может иметь собственное устройство управления, и/или регулирующие клапаны 2014, 2114 могут иметь общее устройство управления и/или каждый регулирующий клапан может иметь собственное устройство управления). Устройства управления (например, блок 266 управления, блок 2022 привода и/или другие устройства управления) могут поддерживать связь друг с другом, чтобы координировать работу узлов 2010, 2110 регулирующих клапанов и гидронасоса 10. Например, как показано на фиг. 1, блок 266 управления поддерживает связь с блоком 2022 привода через коммуникационное соединение 2024. Связь может быть цифровой или аналоговой (или их сочетанием) и может быть проводной или беспроводной (или их сочетанием). В некоторых вариантах осуществления система управления может быть работающей «с наведением по проводам», в том смысле, что управление и сигналы датчика между блоком 266 управления, блоком 2022 привода, узлами 2010, 2110 регулирующих клапанов, гидронасосом 10, датчиками 2016-2018, 2116-2118, все являются электронными или почти все являются электронными. То есть, в случае гидравлических систем, система управления не использует гидравлические линии сигнала или гидравлические линии обратной связи для управления, например, регулирующие клапаны 2014, 2114 не имеют гидравлических соединений для управляющих клапанов. В некоторых системах может быть использовано сочетание электронных и гидравлических элементов управления.
Блок 266 управления может принимать входные данные от блока 276 ввода данных оператора. Используя блок 276 ввода, оператор может вручную управлять системой или выбранными заранее запрограммированными процедурами. Например, оператор может выбрать режим работы для системы, такой как режим расхода (или скорости), режим давления (или крутящего момента) или сбалансированный режим. Режим расхода или скорости может быть использован для работы, если требуется сравнительно быстрый отклик исполнительного механизма 3 при сравнительно малом крутящем моменте, например, сравнительно быстрое втягивание или выдвижение штока поршня в гидроцилиндре, быстрый отклик частоты вращения в гидравлическом двигателе, или любой другой сценарий в каком-либо типе применения, где требуется быстрый отклик привода. И наоборот, режим давления или крутящего момента может быть использован для операции, где требуется сравнительно медленный отклик исполнительного механизма 3 при потребности в относительно высоком крутящем моменте. На основе выбранного режима работы схема управления для управления первичным приводом 11 и регулирующими клапанами 2014, 2114 может быть другой. То есть, в зависимости от необходимого режима работы, например, такого, который задан оператором или который определен системой на основе варианта применения (например, применение в гидравлической стреле или другом типе применения в гидравлике), расход и/или давление для гидравлического исполнительного механизма 3 могут быть управляемыми до необходимого заданного значения путем регулирования либо частоты вращения, либо крутящего момента первичного привода 11 и/или положения регулирующих клапанов 2014, 2114. Работа регулирующих клапанов 2014, 2114 и первичного привода 11 координируется таким образом, что как процент открытия регулирующих клапанов 2014, 2114, так и частота вращения/крутящий момент первичного привода 11 регулируются соответствующим образом для поддержания необходимого расхода/давления в системе. Например, при работе в режиме расхода (или скорости), блок 266 управления/блок 2022 привода регулирует расход в системе путем регулирования частоты вращения первичного привода 11 в сочетании с положением регулирующих клапанов 2014, 2114, как описано далее. Когда система работает в режиме давления (или крутящего момента), блок 266 управления/блок 2022 привода регулирует давления в необходимой точке системы, например, в отверстии A или B гидравлического исполнительного механизма 3, путем регулирования крутящего момента первичного привода 11 в сочетании с положением регулирующих клапанов 2014, 2114, как описано далее. Когда система работает в сбалансированном режиме, блок 266 управления/блок 2022 привода учитывает как давление системы, так и гидравлический расход, при регулировании первичного привода 11 и регулирующих клапанов 2014, 2114.
Использование регулирующих клапанов 2014, 2114 в сочетании с регулированием первичного привода 11 обеспечивает большую гибкость. Например, сочетание регулирующих клапанов 2014, 2114 и первичного привода 11 обеспечивает более быстрое и более точное управление расходом и давлением гидравлической системы, чем при использовании одного лишь гидронасоса. Когда система требует увеличения или уменьшения расхода, блок 266 управления/блок 2022 привода будет изменять частоты вращения первичного привода 11, соответственно. Однако вследствие инерции гидронасоса 10 и гидравлической системы 1, может существовать время задержки между моментом, когда новый задающий сигнал расхода принимается первичным приводом 11, и моментом, когда происходит действительное изменение расхода текучей среды. Аналогично, в режиме давления/крутящего момента также может существовать время задержки между моментом, когда отправляется новый задающий сигнал давления и моментом, когда происходит действительное изменение в системе давления. Когда необходимо время быстрого реагирования, регулирующие клапаны 2014, 2114 позволяют гидравлической системе 1 обеспечивать почти мгновенный отклик на изменения в задающем сигнале расхода/давления. В некоторых системах блок 266 управления и/или блок 2022 привода может определять и устанавливать соответствующий режим работы (например, режим расхода, режим давления, сбалансированный режим) на основе применения и типа выполняемой работы. В некоторых вариантах осуществления оператор сначала устанавливает режим работы, но блок 266 управления/блок 2022 привода может заменить операторскую настройку на основе, например, предварительно заданных протоколов эксплуатации и безопасности. Как указано выше, управление гидронасосом 10 и узлами 2010, 2110 регулирующих клапанов будет изменяться в зависимости от режима работы.
При работе в режиме давления/крутящего момента выходная мощность первичного привода 11 определяется на основе требований к применению системы, используя критерии, такие как максимизация крутящего момента первичного привода 11. Если гидравлическое давление меньше, чем предустановленное значение, например, в отверстии A гидравлического исполнительного механизма 3, блок 266 управления/блок 2022 привода будет увеличивать крутящий момент первичного двигателя для увеличения гидравлического давления, например, если первичный двигатель представляет собой электрический двигатель, ток двигателя (и, следовательно, крутящий момент) увеличивается. Естественно, способ увеличения крутящего момента будет изменяться в зависимости от типа первичного привода. Если давление в отверстии A гидравлического исполнительного механизма 3 выше, чем необходимое давление, блок 266 управления/блок 2022 привода будет уменьшать крутящий момент от первичного привода, например, если первичный привод представляет собой электрический двигатель, ток двигателя (и, следовательно, крутящий момент) уменьшается для снижения гидравлического давления. Хотя в вышеупомянутом варианте используется давление в отверстии A гидравлического исполнительного механизма 3, работа в режиме давления не ограничивается измерением давления в этом месте или даже в одном месте. Вместо этого блок 266 управления/блок 2022 привода может принимать сигналы обратной связи давления из любого другого места или из множества мест в системе для управления. Работа в режиме давления может быть использована в множестве вариантов применения.
Например, если гидравлический исполнительный механизм 3 представляет собой гидроцилиндр, и имеется команда выдвижения (или извлечения) для гидроцилиндра, блок 266 управления/блок 2022 привода определит, что необходимо увеличение давления на входе в камере извлечения гидроцилиндра (например, отверстие A гидравлического исполнительного механизма 3), а затем отправит сигнал к первичному приводу 11 и регулирующим клапанам 2014, 2114, что приводит к увеличению давления на входе камеры извлечения. Аналогично, если гидравлический исполнительный механизм 3 представляет собой гидравлический двигатель, и имеется команда на увеличение частоты вращения гидравлического двигателя, блок 266 управления/блок 2022 привода определит, что необходимо увеличение давления на входе гидравлического двигателя (например, отверстие A гидравлического исполнительного механизма 3), а затем отправит сигнал к первичному приводу 11 и регулирующим клапанам 2014, 2114, что приводит к увеличению давления на входе гидравлического двигателя.
При работе в режиме давления/крутящего момента, задающий сигнал к гидронасосу 10 будет увеличивать ток, подаваемый к первичному приводу 11, приводящему узел 12 перемещения текучей среды гидронасоса 10, что увеличивает крутящий момент. Однако, как указано выше, может иметься время задержки между моментом, когда задающий сигнал отправляется, и моментом, когда давление действительно увеличивается, например, в отверстии A гидравлического исполнительного механизма 3 (которое может быть, например, входом в камеру извлечения гидроцилиндра, входом в гидравлический двигатель или входом в другой тип гидравлического исполнительного механизма). Для уменьшения или устранения времени задержки блок 266 управления/блок 2022 привода будет также одновременно отправлять (например, одновременно или почти одновременно) сигнал к одному или обоим регулирующим клапанам 2014, 2114 для дополнительного открытия (т. е. увеличения открытия клапана). Поскольку время отклика регулирующих клапанов 2014, 2114 меньше, чем время отклика первичного привода 11, за счет того, что регулирующие клапаны 2014, 2114 имеют меньшую инерцию, когда один или оба регулирующих клапана 2014, 2114 начинают открываться дополнительно, давление на гидравлическом исполнительном механизме 3 будет немедленно увеличиваться. Например, если отверстие A гидронасоса 10 представляет собой выпуск насоса 10, регулирующий клапан 2114 может быть управляемым для немедленного регулирования давления в отверстии A гидравлического исполнительного механизма 3 до необходимого значения. В течение времени, когда регулирующий клапан 2114 управляется, первичный привод 11 будет увеличивать давление на выпуске гидронасоса 10. Когда давление увеличивается, блок 266 управления/блок 2022 привода будет выполнять соответствующую корректировку регулирующего клапана 2114 для поддержания необходимого давления в отверстии A гидравлического исполнительного механизма 3.
В некоторых вариантах осуществления регулирующий клапан 2014, 2114 на стороне ниже по потоку от гидронасоса 10, т. е., клапан на стороне выпуска, будет управляемым, пока клапан на стороне выше по потоку остается при постоянном заранее определенном открытии клапана, например, клапан выше по потоку может быть установлен на 100% открытия (или почти 100%, или достаточно высокий процент открытия), чтобы минимизировать сопротивление текучей среды в гидравлических линиях. В вышеуказанном примере блок 266 управления/блок 2022 привода может дросселировать (или регулировать) регулирующий клапан 2114 (т. е. клапан ниже по потоку), в то же время, поддерживая регулирующий клапан 2014 (т. е. клапан выше по потоку) при постоянном открытии клапана, например, 100% открытия. В некоторых вариантах осуществления один или оба из регулирующих клапанов 2014, 2114 также могут быть управляемыми, чтобы устранить или уменьшить нестабильность гидравлической системы 1. Например, поскольку гидравлический исполнительный механизм 3 используется для управления нагрузкой, нагрузка может вызывать нестабильность расхода или давления в гидравлической системе 1 (например, из-за механических проблем в нагрузке, смещения веса нагрузки или некоторых других причин). Блок 266 управления/блок 2022 привода может быть выполнен с возможностью управления регулирующими клапанами 2014, 2114 для устранения или уменьшения нестабильности. Например, если по мере увеличения давления к гидравлическому исполнительному механизму 3, исполнительный механизм 3 начинает действовать неустойчиво (например, цилиндр начинает двигаться слишком быстро, частота вращения гидравлического двигателя слишком большая, или какое-либо другое неустойчивое поведение) из-за нестабильности в нагрузке, блок 266 управления/блок 2022 привода может быть выполнен с возможностью определения неустойчивости на основе датчиков давления и расхода и закрывания одного или обоих регулирующих клапанов 2014, 2114, соответственно, для стабилизации гидравлической системы 1. Конечно, блок 266 управления/блок 2022 привода может быть выполнен с предохранительными устройствами, так что клапан выше по потоку не закрывается до тех пор, пока не остановится гидронасос 10.
В некоторых ситуациях давление в гидравлическом исполнительном механизме 3 (например в отверстии A) выше, чем необходимо. Например, в случае, когда гидравлический исполнительный механизм 3 представляет собой гидроцилиндр, давление более высокое, чем необходимо, может означать, что цилиндр будет выдвигаться или втягиваться слишком быстро, или цилиндр будет выдвигаться или втягиваться, когда он должен быть неподвижным, или в случае, когда гидравлический исполнительный механизм 3 представляет собой гидравлический двигатель, более высокое, чем необходимо, давление, может означать, что частота вращения гидравлического двигателя будет слишком высокой. Конечно, в других типах применений и/или ситуациях более высокое, чем необходимо, давление, может приводить к другим нежелательным условиям эксплуатации. В таких случаях, блок 266 управления/блок 2022 привода может определять, что имеется слишком большое давление в соответствующем отверстии гидравлического привода 3. В таком случае блок 266 управления / блок 2022 привода будет определять, что необходимо уменьшить давление в соответствующем отверстии гидравлического исполнительного механизма 3, и будет затем отправлять сигнал к первичному приводу 11 и к регулирующим клапанам 2014, 2114, что приводит к уменьшению давления. Задающий сигнал к гидронасосу 10 будет уменьшать ток к первичному приводу 11, приводящему узел 12 перемещения текучей среды гидронасоса 10, что уменьшает крутящий момент. Однако, как описано выше, может существовать время задержки между моментом, когда отправляется задающий сигнал, и моментом, когда давление в гидроцилиндре 3 действительно уменьшается. Для уменьшения или устранения времени задержки блок 266 управления/блок 2022 привода будет также одновременно отправлять (например, одновременно или почти одновременно) сигнал к одному или обоим регулирующим клапанам 2014, 2114 для дополнительного закрывания (т. е. уменьшения открытия клапана). Поскольку время отклика регулирующих клапанов 2014, 2114 будет больше, чем время отклика первичного привода 11, за счет того, что регулирующие клапаны 2014, 2114 имеют меньшую инерцию, давление на гидравлическом исполнительном механизме 3 будет немедленно уменьшаться, когда один или оба регулирующих клапана 2014, 2114 начинают закрываться. Поскольку давление на выпуске насоса начинает уменьшаться, один или оба из регулирующих клапанов 2014, 2114 будут начинать открываться, чтобы поддерживать необходимое давления в соответствующем отверстии гидравлического исполнительного механизма 3.
При работе в режиме расхода/скорости энергия, подаваемая к первичному приводу 11 определяется на основании требований к применению системы, используя такие критерии, как то, насколько быстро первичный привод 11 переходит к необходимой частоте вращения, и то, насколько точно может регулироваться частота вращения первичного привода. Поскольку расход текучей среды пропорционален частоте вращения первичного привода 11, и расход текучей среды определяет работу гидравлического исполнительного механизма 3 (например, скорость хода цилиндра, если гидравлический исполнительный механизм 3 представляет собой гидроцилиндр, частота вращения, если гидравлический исполнительный механизм 3 представляет собой гидравлический двигатель, или другой соответствующий параметр, в зависимости от типа системы и типа нагрузки), блок 266 управления/блок 2022 привода может быть выполнен с возможностью управления работой гидравлического исполнительного механизма 3 на основе схемы управления, в которой используют частоту вращения первичного привода 11, расход или их сочетание. То есть, когда, например, требуется конкретное время отклика гидравлического исполнительного механизма 3, например, конкретная скорость хода для гидроцилиндра, конкретная частота вращения гидравлического двигателя или какой-то другой конкретный отклик гидравлического исполнительного механизма 3, блок 266 управления/блок 2022 привода может управлять первичным приводом 11 для достижения заранее заданной частоты вращения и/или заранее заданного расхода текучей среды, соответствующего необходимому конкретному отклику гидравлического исполнительного механизма 3. Например, блок 266 управления/блок 2022 привода может быть настроен с помощью алгоритмов, справочных таблиц, наборов данных или другого программного обеспечения или компонента аппаратуры, чтобы корректировать действие гидравлического исполнительного механизма 3 (например, скорость хода гидроцилиндра, частота вращения гидравлического двигателя, или какой-то другой конкретный отклик) на частоту вращения гидронасоса 10 и/или расход текучей среды в системе 1. Таким образом, блок 266 управления/блок 2022 привода может быть настроен для регулирования либо частоты вращения первичного привода 11, либо расхода текучей среды в системе для достижения необходимой работы гидравлического исполнительного механизма 3.
Если в схеме управления используется расход, блок 266 управления/блок 2022 привода может получать сигнал обратной связи от датчика расхода, например, датчика 2118 или 2018 расхода, или от обоих, для определения фактического расхода в системе. Расход в системе может быть определен путем измерения, например, разности давления между двумя точками в системе, сигналов от ультразвукового датчика расхода, частотного сигнала от датчика расхода турбины или некоторых других датчиков расхода/приборов. Таким образом, в системах, в которых в схеме управления используют расход, блок 266 управления/блок 2022 привода может регулировать выходящий поток гидронасоса 10 до заданного значения расхода, которое соответствует необходимой работе гидравлического исполнительного механизма 3 (например, скорость хода, если гидравлический исполнительный механизм 3 представляет собой гидроцилиндр, частота вращения, если гидравлический исполнительный механизм 3 представляет собой гидравлический двигатель, или другой соответствующий параметр, в зависимости от типа системы и типа нагрузки).
Аналогично, если в схеме управления используют частоту вращения первичного привода 11, блок 266 управления/блок 2022 привода может принимать сигнал (сигналы) обратной связи от первичного привода 11 или узла 12 перемещения текучей среды. Например, может быть измерена фактическая частота вращения первичного привода 11 путем определения вращения элемента перемещения текучей среды. Например, если элемент перемещения текучей среды представляет собой шестеренный механизм, гидронасос 10 может содержать магнитный датчик (не показано), который обнаруживает зубья шестерен по мере их вращения. В качестве альтернативы или в дополнение к магнитному датчику (не показано), один или больше зубьев может содержать магниты, которые обнаруживаются чувствительным элементом, расположенным либо внутри, либо снаружи корпуса гидронасоса. Естественно, магниты и магнитные датчики могут быть включены в другие типы элементов перемещения текучей среды, и могут быть использованы другие типы датчиков скорости. Таким образом, в системах, в которых в схеме управления используют расход, блок 266 управления/блок 2022 привода может регулировать фактическую частоту вращения гидронасоса 10 до заранее заданного значения частоты вращения, соответствующего необходимой работе гидравлического исполнительного механизма 3.
Если система работает в режиме расхода, и применение требует заранее заданного расхода для гидравлического исполнительного механизма 3 (например, для перемещения гидроцилиндра с заранее заданной скоростью хода, для работы гидравлического двигателя с заданной частотой вращения, или какой-либо другой соответствующей операции исполнительного механизма 3, в зависимости от типа системы и типа нагрузки), блок 266 управления/блок 2022 привода будет определять необходимый расход, соответствующий необходимому расходу текучей среды. Если блок 266 управления/блок 2022 привода определяет, что необходимо увеличение расхода текучей среды, блок 266 управления/блок 2022 привода затем отправит сигнал к гидронасосу 10 и регулирующим клапанам 2014, 2114, что приводит к увеличению расхода. Задающий сигнал к гидронасосу 10 будет увеличивать частоту вращения первичного привода 11 для подбора частоты вращения, соответствующей необходимому более высокому расходу. Однако, как описано выше, может существовать время задержки между моментом, когда отправляется задающий сигнал, и моментом, когда расход действительно увеличивается. Для уменьшения или устранения времени задержки блок 266 управления/блок 2022 привода будет также одновременно отправлять (например, одновременно или почти одновременно) сигнал к одному или обоим регулирующим клапанам 2014, 2114 для дополнительного открытия (т. е. увеличения открытия клапана). Поскольку время отклика регулирующих клапанов 2014, 2114 будет больше, чем время отклика первичного привода 11, за счет того, что регулирующие клапаны 2014, 2114 имеют меньшую инерцию, расход текучей среды в системе будет немедленно увеличиваться, когда один или оба регулирующих клапана 2014, 2114 начинают открываться. Блок 266 управления/блок 2022 привода затем будет управлять регулирующими клапанами 2014, 2114 для поддержания необходимого расхода. В то время, когда регулирующие клапаны 2014, 2114 являются управляемыми, первичный привод 11 будет увеличивать свою частоту вращения для соответствия запросу более высокой частоты вращения от блока 266 управления/блока 2022 привода. По мере возрастания частоты вращения первичного привода 11 расход будет возрастать. Однако, когда расход возрастает, блок 266 управления/блок 2022 привода будет выполнять соответствующую корректировку регулирующих клапанов 2014, 2114 для поддержания соответствующего расхода, например, в этом случае блок 266 управления/блок 2022 привода начнет закрывать один или больше регулирующих клапанов 2014, 2114 для поддержания требуемого расхода.
В некоторых вариантах осуществления регулирующий клапан 2014, 2114 на стороне ниже по потоку от гидронасоса 10, т. е., клапан на стороне выпуска, будет управляемым, пока клапан на стороне выше по потоку остается при постоянном заранее определенном открытии клапана, например, клапан выше по потоку может быть установлен на 100% открытия (или почти 100%, или достаточно высокий процент открытия), чтобы минимизировать сопротивление текучей среды в гидравлических линиях. В вышеуказанном примере блок 266 управления/блок 2022 привода дросселирует (или регулирует) регулирующий клапан 2114 (т. е. клапан ниже по потоку), в то же время, поддерживая регулирующий клапан 2014 (т. е. клапан выше по потоку) при постоянном открытии клапана, например, 100% открытия (или примерно 100% или достаточно высокий процент открытия). Аналогично работе в режиме давления, указанном выше, в некоторых вариантах осуществления один или оба из регулирующих клапанов 2014, 2114 также могут быть управляемыми, чтобы устранить или уменьшить нестабильность гидравлической системы 1, как указано выше.
В некоторых ситуациях поток к гидроцилиндру 3 выше, чем необходимо. Например, в случае, когда гидравлический исполнительный механизм 3 представляет собой гидроцилиндр, расход более высокий, чем необходимо, может означать, что цилиндр будет выдвигаться или втягиваться слишком быстро, или цилиндр будет выдвигаться или втягиваться, когда он должен быть неподвижным, или в случае, когда гидравлический исполнительный механизм 3 представляет собой гидравлический двигатель, более высокий, чем необходимо, расход, может означать, что частота вращения гидравлического двигателя будет слишком высокой. Конечно, в других типах применений и/или ситуациях более высокий, чем необходимо, расход может приводить к другим нежелательным условиям эксплуатации. В таких случаях блок 266 управления/блок 2022 привода может определять, что расход для соответствующего отверстия гидравлического исполнительного механизма 3 слишком высокий. В таком случае блок 266 управления/блок 2022 привода будет определять, что необходимо уменьшение потока к гидравлическому исполнительному механизму 3, и будет затем отправлять сигнал к гидронасосу 10 и к регулирующим клапанам 2014, 2114 для уменьшения расхода. Задающий сигнал к гидронасосу 10 будет уменьшать частоту вращения первичного привода 11 для подбора частоты вращения, соответствующей необходимому более низкому расходу. Однако, как описано выше, может существовать время задержки между моментом, когда отправляется задающий сигнал, и моментом, когда расход действительно уменьшается. Для уменьшения или устранения времени задержки блок 266 управления/блок 2022 привода будет также одновременно отправлять (например, одновременно или почти одновременно) сигнал по меньшей мере к одному из регулирующих клапанов 2014, 2114 для дополнительного закрывания (т. е. уменьшения открытия клапана). Поскольку время отклика регулирующих клапанов 2014, 2114 будет больше, чем время отклика первичного привода 11, за счет того, что регулирующие клапаны 2014, 2114 имеют меньшую инерцию, расход в системе будет немедленно уменьшаться, когда регулирующий клапан (клапаны) 2014, 2114 начинают закрываться. По мере уменьшения частоты вращения первичного привода 11 расход также будет уменьшаться. Однако блок 266 управления/блок 2022 привода будет соответствующим образом управлять регулирующими клапанами 2014, 2114 для поддержания необходимого расхода (т. е. блок 266 управления/блок 2022 привода будет начинать открывать один или оба из регулирующих клапанов 2014, 2114 по мере уменьшения частоты вращения первичного привода). Например, клапан ниже по потоку с соответствующим гидронасосом 10 может дросселироваться для регулирования до необходимого значения, тогда как клапан выше по потоку поддерживается при постоянном значении открытия, например 100% открытия, для уменьшения сопротивления потоку. Если, тем не менее, необходим еще более быстрый отклик (или сигнал команды для быстрого уменьшения потока), блок 266 управления/блок 2022 привода также может быть выполнен с возможностью закрывания в значительной мере клапана выше по потоку. Закрывание в значительной степени клапана выше по потоку может служить для функционирования в качестве «гидравлического тормоза» для быстрого торможения потока в гидравлической системе 1 путем увеличения противодавления на гидравлическом исполнительном механизме 3. Конечно, блок 266 управления/блок 2022 привода может быть выполнен с предохранительными устройствами, так что клапан выше по потоку не закрывается до тех пор, пока не остановится гидронасос 10. Кроме того, как описано выше, регулирующие клапаны 2014, 2114 также могут быть управляемыми, чтобы устранить или уменьшить нестабильность гидравлической системы 1.
При работе в сбалансированном режиме блок 266 управления/блок 2022 привода может быть выполнен с возможностью учитывать как поток, так и давление системы. Например, блок 266 управления/блок 2022 привода может сначала регулировать до заданного значения расход во время нормальной работы, но блок 266 управления/блок 2022 привода будет также обеспечивать, чтобы давление оставалось в пределах определенного верхнего и/или нижнего пределов. И наоборот, блок 266 управления/блок 2022 привода может сначала регулировать до заданного значения давление, но блок 266 управления/блок 2022 привода будет также обеспечивать, чтобы расход оставался в пределах определенного верхнего и/или нижнего пределов. В некоторых вариантах осуществления гидронасос 10 и регулирующие клапаны 2014, 2114 могут иметь специализированные функции. Например, давление в системе может регулироваться с помощью гидронасоса 10, а расход в системе может регулироваться с помощью регулирующих клапанов 2014, 2114, или наоборот, при необходимости.
В указанных примерах вариантов осуществления, чтобы гарантировать, что имеется достаточная резервная мощность для обеспечения быстрого отклика потока, при необходимости, регулирующие клапаны 2014, 2114 могут быть управляемыми в диапазоне, который позволяет перемещение в любом направлении для обеспечения быстрого увеличения или уменьшения расхода или давления в гидравлическом исполнительном механизме 3. Например, регулирующий клапан ниже по потоку относительно гидронасоса 10 может быть управляемым при проценте открытия, меньшем, чем 100%, т. е. в положении дросселирования. То есть, регулирующий клапан ниже по потоку может быть установлен на регулирование, например, при 85% полного открытия клапана. Данное положение дросселирования обеспечивает ход клапана на 15% в направлении открытия для быстрого увеличения потока или давления в соответствующем отверстии гидравлического исполнительного механизма 3, при необходимости. Конечно, установка регулирующего клапана не ограничена 85%, и регулирующие клапаны 2014, 2114 могут быть управляемыми при любом необходимом проценте. В некоторых вариантах осуществления управление может быть установлено на управление при проценте открытия, который соответствует проценту максимального расхода или давления, например, 85% максимального расхода/давления, некоторого другого необходимого значения. В то время как ход в направлении закрывания может доходить до 0% открытия клапана для уменьшения расхода и давления в гидравлическом исполнительном механизме 3, для поддержания устойчивости системы, ход клапана в направлении закрывания может быть ограничен, например, до процента открытия клапана и/или процента максимального расхода/давления. Например, блок 266 управления/блок 2022 привода может быть выполнен с возможностью предотвращения дополнительного закрывания регулирующих клапанов 2014, 2114, если нижний достигнут нижний предел относительно открытия клапана или процента максимального расхода/давления. В некоторых вариантах осуществления блок 266 управления/блок 2022 привода может ограничивать регулирующие клапаны 2014, 2114 от дополнительного открытия, если достигнут верхний предел открытия регулирующего клапана и/или процент максимального расхода/давления.
В некоторых вариантах осуществления гидравлическая система 1 может быть гидравлической системой с замкнутым контуром. Например, гидравлический исполнительный механизм 3, гидравлический насос 10, узлы 2010, 2110 пропорциональных регулирующих клапанов, аккумулятор 170, источник энергии 2020 и блок 266 управления/блок 2022 привода, показанные на фиг. 1, могут образовывать гидравлическую систему с замкнутым контуром. В гидравлической системе с замкнутым контуром текучая среда, выходящая, например, из камеры втягивания или выдвижения гидравлического исполнительного механизма 3, направляется обратно в насос 10 и немедленно рециркулируется. Как указано выше, схема управления, описанная выше, в примерах вариантов осуществления, особенно предпочтительна в системах с замкнутым контуром, поскольку более быстрое и более точное регулирование расхода текучей среды и/или давления в системе может означать меньшие размеры аккумулятора и уменьшенный риск кавитации насоса, чем в обычных системах. Однако гидравлическая система 1 согласно изобретению не ограничена гидравлическими системами с замкнутым контуром. Например, гидравлическая система 1 может образовывать гидравлическую систему с разомкнутым контуром. В гидравлической системе с разомкнутым контуром текучая среда, выходящая, например, из гидравлического исполнительного механизма 3, может быть направлена в отстойник, а впоследствии извлечена из отстойника насосом 10. Таким образом, гидравлическая система 1 согласно изобретению может быть выполнена в виде системы с замкнутым контуром, системой с разомкнутым контуром или сочетания обеих, не отходя от объема изобретения.
В системе, показанной на фиг. 1, узлы 2010, 2110 регулирующих клапанов показаны как наружные относительно гидронасоса 10, с одним узлом регулирующего клапана, расположенным на каждой стороне гидронасоса 10 вдоль направления потока. А именно, узел 2010 регулирующего клапана расположен между отверстием B гидронасоса 10 и отверстием B гидравлического привода 3, а узел 2110 регулирующего клапана расположен между отверстием A гидронасоса 10 и отверстием A гидравлического исполнительного механизма 3. Однако в других вариантах осуществления узлы 2010, 2110 регулирующих клапанов могут быть расположены внутри относительно гидронасоса 10 (или корпуса насоса). Например, узел 2010 регулирующего клапана может быть расположен внутри корпуса насоса на стороне отверстия B гидронасоса 10, а узел 2110 регулирующего клапана может быть расположен внутри корпуса насоса на стороне отверстия A гидронасоса 10.
Хотя гидравлическая система 1, показанная на фиг. 1, представлена как имеющая один насос 10, в других вариантах осуществления гидравлическая система 1 может иметь множество гидронасосов. Например, гидравлическая система 1 может иметь два гидронасоса. Кроме того, множество насосов может быть соединено последовательно или параллельно (или как комбинация обоих) с гидравлической системой 1, в зависимости, например, от функциональных потребностей гидравлической системы 1. Например, если гидравлическая система 1 нуждается в повышенном давлении системы, может быть использована конфигурация последовательного соединения для множества насосов. Если гидравлическая система 1 нуждается в повышенном расходе системы, может быть использована конфигурация параллельного соединения для множества насосов. Блок 266 управления/блок 2022 привода может отслеживать давление и/или расход от каждого из насосов и регулировать каждый насос до необходимого давления/расхода для этого насоса, как описано выше.
Как описано выше, узлы 2010, 2110 регулирующих клапанов содержат регулирующие клапаны 2014, 2114, которые могут быть дросселированы между 0% и 100% открытия клапана. На фиг. 2 показаны регулирующие клапаны 2014, 2114 согласно примеру варианта осуществления. Как показано на фиг. 2, каждый из регулирующих клапанов 2014, 2114 может содержать шаровой клапан 2032 и исполнительный механизм 2030 клапана. Исполнительный механизм 2030 клапана может быть полностью электрическим исполнительным механизмом, т. е. не содержать гидравлических элементов, которые открывают и закрывают шаровой клапан 2032 на основе сигналов от блока 266 управления/блока 2022 привода через коммуникационное соединение 2025, 2125. Однако варианты осуществления изобретения не ограничены полностью электрическими исполнительными механизмами, и могут быть использованы другие типы исполнительных механизмов, такие как электрогидравлические исполнительные механизмы. Блок 266 управления/блок 2022 привода может включать в себя характеристические кривые для шарового клапана 2032, которые корректируют процент поворота шарового клапана 2032 относительно фактического или процентного открытия поперечного сечения шарового клапана 2032. Характеристические кривые могут быть заранее заданными и специфическими для каждого типа и размера шарового клапана 2032, и сохраняются в блоке 266 управления и/или блоке 2022 привода. Характеристические кривые, либо для регулирующих клапанов, либо для первичных двигателей, могут быть сохранны в памяти, например, ПЗУ, ОЗУ, СППЗУ и т. п. в форме справочных таблиц, формул, алгоритмов и т. п. Блок 266 управления/блок 2022 привода использует характеристические кривые для точного управления первичным приводом 11 и регулирующими клапанами 2014, 2114. В качестве альтернативы или в дополнение к характеристическим кривым, сохраняемым в блоке 266 управления/блоке 2022 привода, регулирующие клапаны 2014, 2114 и/или первичные приводы также могут содержать память, например, ПЗУ, ОЗУ, СППЗУ и т. п. для сохранения характеристических кривых в виде, например, справочных таблиц, формул, алгоритмов, наборов данных или другой компонент программного обеспечения или аппаратуры, который сохраняет соответствующую взаимосвязь, например, в случае регулирующих клапанов примером взаимосвязи может быть корреляция между процентом поворота шарового клапана относительно фактического или процентного открытия поперечного сечения шарового клапана, а в случае первичного привода, примером взаимосвязи может быть корреляция между входной мощностью первичного привода и фактической выходной скоростью, расходом, давлением, крутящим моментом или каким-либо другим выходным параметром первичного привода.
Блок 266 управления может быть выполнен исключительно для управления гидравлической системой 1. В качестве альтернативы, блок 266 управления может быть частью другой системы управления (или во взаимодействии с ней) для машины или промышленного применения, в которой действует гидравлическая система 1. Блок 266 управления может содержать центральный процессор (ЦПУ), который выполняет различные процессы, такие как задаваемые командой операции или запрограммированные процедуры. Данные технологического процесса и/или процедур могут быть сохранены в памяти. Процедуры также могут быть сохранены на запоминающем диске, таком как жесткий диск (hard drive, HDD) или переносном носителе, или могут быть сохранены удаленно. Однако запоминающая среда не ограничена носителями, описанными выше. Например, процедуры могут быть сохранены на компакт-дисках, многоцелевых компакт-дисках, в флэш-памяти, ОЗУ, ПЗУ, ППЗУ, СППЗУ, ЭСППЗУ, жестком диске или других устройствах обработки информации, с которыми поддерживает связь компьютеризованное рабочее место конструктора, такое как сервер или компьютер.
ЦПУ может быть процессором Xenon или Core американской компании Intel, или процессором Opteron американской компании AMD, или может быть другими типами процессоров, которые известны специалистам в данной области. В качестве альтернативы ЦПУ может быть реализован на программируемой вентильной матрице, специализированной интегральной схеме, программируемом логическом устройстве, или используя схемы дискретной логики, как известно специалисту в данной области. Кроме того, ЦПУ может быть реализован как множество процессоров, работающих во взаимодействии, параллельно, для выполнения задаваемых командами операций или запрограммированных процедур.
Блок 266 управления может содержать сетевой контроллер, такой как сетевая интерфейсная плата Intel Ethernet PRO американской компании Intel Corporation для взаимодействия с сетью. Как должно быть понятно, сеть может быть общедоступной сетью, такой как Интернет, или частной сетью, такой как локальная сеть или глобальная вычислительная сеть, или каким-либо их сочетанием, и может также включать в себя подсети: коммутируемую телефонную сеть общего пользования или цифровую сеть с комплексными услугами. Сеть может также быть проводной, такой как сеть Ethernet, или может быть беспроводной, такой как сотовая сеть, включая беспроводные системы сотовой связи EDGE, 3G и 4G. Беспроводная сеть может также быть WiFi, Bluetooth, или какой-либо другой беспроводной формой связи, которая известна. Блок 266 управления может принимать команду от оператора через пользовательской устройство ввода, такое как клавиатура и/или мышь, посредством проводной или беспроводной связи. На фиг. 3 показан гидронасос согласно примеру варианта осуществления, который может быть использован в вышеописанной системе 1 текучей среды. Насос 10’ представляет собой шестеренный насос с объемным перемещением (или с фиксированным рабочим объемом), который может быть использован в качестве гидронасоса 10 по фиг. 1. Шестеренный насос 10’ может содержать зубчатую передачу 2040 и двигатель 2042. Зубчатая передача 2040 может содержать корпус (или кожух), имеющий полость, в которой установлена пара шестерен. Пара шестерен в зубчатой передаче 2040 может иметь конфигурацию ведущая шестерня-ведомая шестерня (не показано), обычно используемую в традиционном шестеренном насосе. То есть, одна из шестерен известна как «ведущая шестерня», и приводится в действие от ведущего вала, соединенного с внешним приводным устройством, таким как двигатель или электродвигатель. Другая шестерня известна как «ведомая шестерня» (или промежуточная шестерня)), которая зацепляется с ведущей шестерней. Шестеренный насос может быть «насосом с внутренним зацеплением», т. е. одна из шестерен имеет внутренние зубья, а другая шестерня имеет внешние зубья, или «насосом с внешним зацеплением», т. е. обе шестерни имеют внешние зубья. Шестеренные насосы с внешним зацеплением используют прямозубые, геликоидальные или шевронные шестерни, в зависимости от предполагаемого применения. Двигатель 2042 может приводить в действие зубчатую передачу 2040 через вал 2044. Двигатель 2042 может быть двигателем с регулируемой частотой вращения, регулируемым крутящим моментом, который может быть управляемым от блока 266 управления/блока 2022 привода, как описано выше. Поскольку шестеренные насосы с внутренним и внешним зацеплением в конфигурации ведущий элемент-ведомый элемент известны специалистам в данной области, для краткости, они не будут описаны.
В некоторых вариантах осуществления насос может содержать два приводных устройства для текучей среды, с каждым приводным устройством для текучей среды, содержащим первичный привод и узел перемещения текучей среды. Первичные приводы независимо приводят в действие соответствующий узел перемещения текучей среды. То есть, как поясняется далее в отношении насоса 10’’ на фиг. 4 – 6A, эти насосы имеют конфигурацию ведущий элемент-ведущий элемент, а не конфигурацию ведущий элемент-ведомый элемент. На фиг. 4 приведен насос 10’’ согласно примеру варианта осуществления в разобранном виде, который может быть использован в системе 1, описанной выше. Кроме того, для краткости пример варианта осуществления будет описан в отношении шестеренного насоса с внешним зацеплением, имеющим двигатели в качестве первичных приводов. Однако, как описано выше, изобретение не ограничено схемой насоса с внешним зацеплением, электрическими двигателями в качестве первичных приводов или шестернями в качестве элементов перемещения текучей среды.
Насос 10’’ содержит два приводных устройства 40, 60 для текучей среды, которые, соответственно, содержат двигатели 41, 61 (первичные приводы) и шестерни 50, 70 (элементы перемещения текучей среды). В этом варианте осуществления оба двигателя 41, 61 насоса расположены внутри шестерен 50, 70 насоса. Как показано на фиг. 4, насос 10’’ представляет собой шестеренный насос с объемным регулированием (или постоянным перемещением). Насос 10’’ содержит корпус 20, имеющий торцевые пластины 80, 82 и корпусную часть 83 насоса. Эти две пластины 80, 82 и корпусная часть 83 насоса могут быть соединены множеством стяжных болтов 113 и гаек 115, и внутренняя поверхность 26 ограничивает внутренний объем 98. Для предотвращения утечки уплотняющие кольца или другие аналогичные устройства могут быть расположены между торцевыми пластинами 80, 82 и корпусной частью 83 насоса. Корпус 20 имеет отверстие 22 и отверстие 24 (см. также фиг. 5), которые сообщаются по текучей среде с внутренним объемом 98. Во время работы и на основании направления потока одно из отверстий 22, 24 является впускным отверстием насоса, а другое является выпускным отверстием насоса. В примере варианта осуществления отверстия 22, 24 корпуса 20 являются круглыми сквозными отверстиями на противоположных боковых стенках корпуса 20. Однако форма не является ограничением, и сквозные отверстия могут иметь другие формы. Кроме того, одно или оба отверстия 22, 24 могут быть расположены либо в верхней, либо в нижней части корпуса. Естественно, отверстия 22, 24 должны быть расположены таким образом, чтобы одно отверстие находилось на стороне впуска насоса, а другое отверстие находилось на стороне выпуска насоса.
Как показано на фиг. 4, пара шестерен 50, 70 расположена во внутреннем объеме 98. Каждая из шестерен 50, 70 имеет множество зубьев 52, 72 шестерен, проходящих в радиальном направлении наружу от соответствующих корпусов шестерен. Зубья 52, 72 шестерен, при вращении, например, посредством электрических двигателей 41, 61, перемещают текучую среду от впуска к выпуску. В некоторых вариантах осуществления насос 10’’ является реверсивным. Таким образом, любое отверстие 22 или 24 может быть впускным отверстием, в зависимости от направления вращения шестерен 50, 70, а другое отверстие будет выпускным отверстием. Шестерни 50, 70 имеют цилиндрические отверстия 51, 71 вдоль осевой линии соответствующих корпусов шестерен. Цилиндрические отверстия 51, 71 могут проходить либо частично, либо по всей длине корпусов шестерен. Цилиндрические отверстия выполнены с такими размерами, чтобы вставлять в них пару двигателей 41, 61. Каждый двигатель 41, 61, соответственно, содержит вал 42, 62, статор 44, 64, ротор 46, 66.
На фиг. 5 показан шестеренный насос 10’’ с внешним зацеплением по фиг. 4, вид сверху в разрезе. На фиг. 5A показан шестеренный насос 10 с наружным зацеплением в разрезе по линии A-A на фиг. 5, вид сбоку, и на фиг. 5B показан шестеренный насос 10 с наружным зацеплением в разрезе по линии В-В на фиг. 5, вид сбоку. Как видно на фиг. 5 – 5B, приводные устройства 40, 60 для текучей среды расположены в корпусе 20. Опорные валы 42, 62 приводных устройств 40, 60 для текучей среды расположены между отверстием 22 и отверстием 24 корпуса 20 и поддерживаются верхней пластиной 80 с одного конца 84 и нижней пластиной 82 с другого конца 86. Однако средства для поддерживания валов 42, 62 и, тем самым, приводных устройств 40, 60 для текучей среды не ограничиваются до этой конструкции, и для поддерживания вала могут быть использованы другие конструкции. Например, валы 42, 62 могут поддерживаться блоками, которые прикрепляют к корпусу 20, а не самим корпусом 20 непосредственно. Опорный вал 42 приводного устройства 40 для текучей среды расположен параллельно опорному валу 62 приводного устройства 60 для текучей среды, и два вала расположены на соответствующем расстоянии друг от друга, так что зубья 52, 72 соответствующих шестерен 50, 70 контактируют друг с другом во время вращения.
Статоры 44, 64 двигателей 41, 61 расположены радиально между соответствующими опорными валами 42, 62 и роторами 46, 66. Статоры 44, 64 неподвижно соединены с соответствующими опорными валами, 42, 62, которые неподвижно соединены с корпусом 20. Роторы 46, 66 расположены радиально снаружи статоров 44, 64 и окружают соответствующие статоры 44, 64. Таким образом, в этом варианте осуществления двигатели 41, 61 имеют конструкцию двигателя с наружным ротором (или конструкцию двигателя с внешним ротором), т.е. наружная часть двигателя вращается, и центральная часть двигателя остается неподвижной. В отличие от этого в конструкции двигателя с внутренним ротором ротор прикрепляют к центральному валу, который вращается. В показанном варианте электрические двигатели 41, 61 являются разнонаправленными электрическими двигателями. Другими словами, любой двигатель может работать и создавать вращательное движение или по часовой стрелке или против часовой стрелки в зависимости от производственной необходимости. Кроме того, в показанном варианте двигатели 41, 61 являются двигателями с регулируемой частотой вращения, регулируемым крутящим моментом, в которых частота вращения ротора и, тем самым, прикрепленной шестерни может изменяться для создания различных объемных потоков и давлений насоса.
Как описано выше, корпуса шестерен могут содержать цилиндрические отверстия 51, 71, в которых установлены двигатели 41, 61. В примере варианта осуществления приводные устройства 40, 60 для текучей среды могут, соответственно, содержать наружные опорные элементы 48, 68 (см. фиг. 5), которые способствуют соединению двигателей 41,61 с шестернями 50, 70 и опоре шестерен 50, 70 на двигатели 41,61. Каждый из опорных элементов 48, 68 может быть, например, втулкой, которая вначале прикреплена либо к наружной части корпуса двигателей 41,61, либо к внутренней поверхности цилиндрических отверстий 51, 71. Втулки могут быть прикреплены, используя способ посадки с натягом, прессовой посадки, клей, винты, болты, сварку или пайку, или другие способы, которыми можно крепить опорные элементы к цилиндрическим отверстиям. Аналогично, окончательное соединение между двигателями 41, 61 и шестернями 50, 70 с использованием опорных элементов 48, 68 может быть выполнено, используя способ посадки с натягом, прессовой посадки, клей, винты, болты, сварку или пайку, или другие способы, которыми можно крепить двигатели к опорным элементам. Эти втулки могут быть различной толщины, например, чтобы облегчить прикрепление двигателей 41, 61 с различными физическими размерами к шестерням 50, 70 или наоборот. Кроме того, если корпуса двигателей и шестерни выполнены из материалов, которые несовместимы, например, химически или в другом отношении, втулки могут быть выполнены из материалов, которые совместимы как с составом шестерен, так и с составом корпуса двигателя. В некоторых вариантах осуществления опорные элементы 48, 68 могут быть выполнены как защитные детали. То есть, опорные элементы 48, 68 предназначены для того, чтобы выходить из строя первыми, например, вследствие избыточных нагрузок, температур или других причин выхода из строя, по сравнению с шестернями 50, 70 и двигателями 41, 61. Это обеспечивает более экономичный ремонт насоса 10 в случае выхода из строя. В некоторых вариантах осуществления наружные опорные элементы 48, 68 являются не отдельными деталями, а составной частью корпуса для двигателей 41, 61 или частью внутренней поверхности цилиндрических отверстий 51, 71 шестерен 50, 70. В других вариантах осуществления двигатели 41, 61 могут поддерживать шестерни 50, 70 (и множество первых зубьев 52, 72 шестерен) на своих наружных поверхностях без необходимости в наружных опорных элементах 48, 68. Например, корпуса двигателей могут быть напрямую соединены с внутренней поверхностью цилиндрического отверстия 51, 71 шестерен 50, 70, используя способ посадки с натягом, прессовой посадки, винты, болты, клей, сварку или пайку, или другие способы крепления корпуса двигателя к цилиндрическому отверстию. В некоторых вариантах осуществления наружные корпуса двигателей 41, 61 могут быть, например, механически обработанными, литыми или изготовлены другими способами, чтобы формировать наружный корпус для образования формы зубьев 52, 72 шестерен. В еще одном варианте осуществления множество зубьев 52, 72 шестерен может быть объединено с соответствующими роторами 46, 66, так что каждая комбинация шестерня/ротор образует одно тело вращения.
В вышеописанных примерах вариантов осуществления оба приводных устройства 40, 60 текучей среды, содержащих электрические двигатели 41, 61 и шестерни 50, 70, объединены в одном корпусе 20 насоса. Эта новая конструкция шестеренного насоса 10 с внешним зацеплением согласно изобретению создает компактную конструкцию, которая обеспечивает различные преимущества. Во-первых, пространство или опорная поверхность, занимаемая шестеренным насосом согласно вариантам осуществления, описанными выше, значительно уменьшена благодаря объединению необходимых компонентов в одном корпусе насоса, по сравнению с обычными шестеренными насосами. Кроме того, общий вес системы насоса также снижен за счет удаления необязательных деталей, таких как вал, соединяющий двигатель с насосом, и отдельных монтажных устройств для приводных устройств двигателя/шестерни. Кроме того, поскольку насос 10 согласно изобретению имеет компактную и модульную конструкцию, он может быть легко установлен, даже в местах, где обычные шестеренные насосы не могут быть установлены, и может быть легко заменен. Далее приведено подробное описание работы насоса.
На фиг. 6 поясняется траектория потока текучей среды в шестеренном насосе 10 с внешним зацеплением согласно варианту осуществления. Отверстия 22, 24, и зона 78 контакта между множеством зубьев 52 первой шестерни и множеством зубьев 72 второй шестерни по существу выровнены вдоль одной прямолинейной траектории. Однако выравнивание отверстий не ограничено этим примером варианта осуществления, и допустимы другие варианты выравнивания. С целью пояснения, шестерня 50 приводится с возможностью вращения по часовой стрелке 74 двигателем 41, а шестерня 70 приводится с возможностью вращения против часовой стрелки 76 двигателем 61. При такой конфигурации вращения отверстие 22 является стороной впуска шестеренного насоса 10, а отверстие 24 является стороной выпуска шестеренного насоса 10. В некоторых примерах вариантов осуществления обе шестерни 50, 70 являются, соответственно, приводимыми независимо от отдельных двигателей 41, 61.
Как показано на фиг. 6, подлежащая перекачиванию текучая среда втягивается в корпус 20 в отверстие 22, как показано стрелкой 92, и выходит из насоса 10 через отверстие 24, как показано стрелкой 96. Перекачивание текучей среды выполняется с помощью зубьев 52, 72 шестерен. Когда зубья 52, 72 шестерен вращаются, зубья шестерен, вращающиеся вне зоны 78 контакта, образуют расширяющиеся межзубные объемы между соседними зубьями каждой шестерни. Когда данные объемы между зубьями расширяются, промежутки между смежными зубьями заполняются текучей средой из впускного отверстия, которое является отверстием 22 в данном примере варианта осуществления. Затем каждая шестерня заставляет текучую среду двигаться вдоль внутренней стенки 90 корпуса 20, как показано стрелками 94 и 94’. То есть, зубья 52 шестерни 50 заставляют текучую среду течь по траектории 94, а зубья 72 шестерни 70 заставляют текучую среду течь по траектории 94’. Очень малые зазоры между вершинами зубьев 52, 72 шестерен на каждой шестерне и соответствующей внутренней стенкой 90 корпуса 20 удерживают захваченную текучую среду в межзубных объемах, что препятствует вытеканию текучей среды обратно, в направлении впускного отверстия. Поскольку зубья 52, 72 шестерен вращаются вокруг и обратно в зону 78 контакта, сокращение межзубных объемов образуется между соседними зубьями на каждой шестерне, поскольку соответствующий зуб другой шестерни входит в пространство между соседними зубьями. Сокращение межзубных объемов заставляет текучую среду входить в пространство между соседними зубьями и вытекать из насоса 10 через отверстие 24, как показано стрелкой 96. В некоторых вариантах осуществления двигатели 41, 61 являются реверсивными, и вращение двигателей 41, 61 может реверсироваться для изменения направления течения текучей среды через насос на обратное направление, т.е. так, чтобы текучая среда двигалась от отверстия 24 к отверстию 22.
Во избежание обратного течения, т.е. утечки текучей среды со стороны выпуска на сторону впуска через зону 78 контакта, контакт между зубом первой шестерни 50 и зубом второй шестерни 70 в зоне 78 контакта обеспечивает уплотнение против обратного течения. Усилие контакта является достаточно большим для обеспечения значительного уплотнения, но в отличие от существующих систем усилие контакта не является таким большим, чтобы приводить в движение другую шестерню. В существующих системах ведущая шестерня – ведомая шестерня усилие, прикладываемое ведущей шестерней, поворачивает ведомую шестерню. Другими словами, ведущая шестерня входит в зацепление (или соединяется) с ведомой шестерней и механически приводит в движение ведомую шестерню. Несмотря на то, что сила, прикладываемая ведущей шестерней, создает уплотнение на границе контакта двух зубьев, эта сила намного превышает силу, необходимую для создания уплотнения, поскольку эта сила должна быть достаточной для механического приведения в движение ведомой шестерни для транспортирования текучей среды при требуемых расходе и давлении. Такое большое усилие ведет к срезанию материала с зубьев в существующих насосах. Срезанный материал может распространяться в текучей среде, перемещаться по гидравлической системе и повреждать важные рабочие компоненты, такие как уплотнительные кольца и подшипники. В результате вся система насоса может выходить из строя, вызывая остановку работы насоса. Такая поломка и остановка работы насоса могут приводить к значительному простою для ремонта насоса.
Однако в насосе 10’’ согласно примеру варианта осуществления шестерни 50, 70 насоса 10 механически не приводят в движение другую шестерню в какой-либо значительной степени, когда зубья 52, 72 образуют уплотнение в зоне 78 контакта. Вместо этого шестерни 50, 70 приводятся в действие с возможностью вращения независимо, так что зубья 52, 72 шестерен не истирают друг друга. То есть, шестерни 50, 70 приводятся синхронно для создания контакта, но не истирая друг друга. В частности, вращение шестерен 50, 70 синхронизировано при подходящих частотах вращения, так что зуб шестерни 50 контактирует с зубом второй шестерни 70 в зоне 78 контакта с усилием, достаточным для обеспечения по существу значительного уплотнения, т. е., утечка текучей среды со стороны выпускного отверстия на сторону впускного отверстия через зону 78 контакта по существу устранена. Однако в отличие от конфигураций ведущая шестерня – ведомая шестерня сила контакта между двумя шестернями является недостаточной для того, чтобы одна шестерня механически приводила в движение другую шестерню до значительной степени. Прецизионное управление двигателями 41, 61 будет обеспечивать, что во время эксплуатации положения шестерен будут оставаться синхронизированными по отношению друг к другу.
В некоторых вариантах осуществления вращение шестерен 50, 70, по меньшей мере, на 99% является синхронизированным, при этом 100% синхронизация означает, что обе шестерни 50, 70 вращаются с одинаковым числом оборотов в минуту. Однако процентная синхронизация может варьироваться при условии обеспечения достаточного уплотнения посредством контакта зубьев двух шестерен 50, 70. В вариантах осуществления степень синхронизации может составлять 95,0 – 100% на основе соотношения зазоров между зубьями 52 шестерни и зубьями 72 шестерни. В других вариантах осуществления степень синхронизации составляет 99,0 – 100% на основе соотношения зазоров между зубьями 52 шестерни и зубьями 72 шестерни, и в иных вариантах осуществления степень синхронизации составляет 99,5 – 100% на основе соотношения зазоров между зубьями 52 шестерни и зубьями 72 шестерни. Как и в предыдущем случае, прецизионное управление двигателями 41, 61 будет обеспечивать, что во время эксплуатации положения шестерен будут оставаться синхронизированными по отношению друг к другу. Благодаря надлежащей синхронизации шестерен 50, 70 зубья 52, 72 шестерен могут обеспечивать значительное уплотнение, например, степень обратного течения или утечки с коэффициентом проскальзывания в диапазоне 5% и менее. Например, для стандартной гидравлической текучей среды при температуре приблизительно 120 градусов F коэффициент проскальзывания может составлять 5% и менее для давлений насоса в диапазоне 3000 – 5000 фунт/дюйм², 3% и менее для давлений насоса в диапазоне 2000 – 3000 фунт/дюйм², 2% и менее для давлений насоса в диапазоне 1000 – 2000 фунт/дюйм² и 1% и менее для давлений насоса в диапазоне до 1000 фунт/дюйм². Разумеется, в зависимости от типа насоса синхронизированный контакт может способствовать перекачиванию текучей среды. Например, в некоторых конструкциях героторных насосов с внутренним зацеплением синхронизированный контакт двух приводных устройств для текучей среды способствует перекачиванию текучей среды, которая захватывается между противолежащими шестернями. В некоторых примерах вариантов осуществления шестерни 50, 70 синхронизируются посредством надлежащей синхронизации двигателей 41, 61. Синхронизация многоступенчатых двигателей по существующему уровню техники известна, поэтому подробное описание опущено.
В примере варианта осуществления синхронизация шестерен 50, 70 обеспечивает односторонний контакт между зубьями шестерни 50 и зубьями шестерни 70. На фиг. 6A на виде в разрезе поясняется односторонний контакт между двумя шестернями 50, 70 в зоне 78 контакта. В пояснительных целях шестерня 50 приводится во вращение по часовой стрелке 74, а шестерня 70 – против часовой стрелки 76 независимо от шестерни 50. Кроме того, шестерня 70 вращается быстрее, чем шестерня 50 на долю секунды, например, 0,01 с/об. Это различие в частотах вращения шестерни 50 и шестерни 70 обеспечивает односторонний контакт между двумя шестернями 50, 70, который образует значительное уплотнение между зубьями двух шестерен 50, 70 для создания уплотнения между впускным отверстием и выпускным отверстием, как описано выше. Таким образом, как показано на фиг. 6A, зуб 142 шестерни 70 контактирует с зубом 144 шестерни 50 в точке 152 контакта. Если сторона зуба шестерни, которая обращена вперед в направлении вращения 74, 76 определяется как передняя сторона (F), то передняя сторона (F) зуба 142 контактирует с задней стороной (R) зуба 144 в точке 152 контакта. Однако зубья шестерен имеют такие размеры, что передняя сторона (F) зуба 144 не находится в контакте с (т.е. расположена на некотором расстоянии) задней стороной (R) зуба 146, который является зубом, расположенным рядом с зубом 142 на шестерне 70. Таким образом, зубья 52, 72 шестерен выполнены так, что в зоне 78 контакта существует односторонний контакт, когда шестерни 50, 70 находятся в движении. Когда зуб 142 и зуб 144 выходят из зоны 78 контакта во время вращения шестерен 50, 70, односторонний контакт между зубьями 142 и 144 постепенно прекращается. При условии существования различия в частотах вращения двух шестерен 50, 70 этот односторонний контакт периодически образуется между зубом шестерни 50 и зубом шестерни 70. Однако во время вращения шестерен 50, 70 следующие два зуба соответствующих шестерен образуют следующий односторонний контакт, поэтому контакт существует постоянно, и траектория обратного потока в зоне 78 контакта, по существу, остается уплотненной. Другими словами, односторонний контакт обеспечивает уплотнение между отверстиями 22 и 24, поэтому исключается (или, по существу, исключается) обратное течение текучей среды к впуску насоса через зону 78 контакта.
На фиг. 6A односторонний контакт между зубом 142 и зубом 144 показан как существующий в отдельной точке, т. е. точке 152 контакта. Однако односторонний контакт между зубьями шестерен в примерах вариантов осуществления не ограничен контактом в отдельной точке. Например, односторонний контакт может возникать во множестве точек или вдоль линии контакта между зубом 142 и зубом 144. Для другого примера односторонний контакт может возникать между площадями поверхности двух зубьев шестерни. Таким образом, участок уплотнения может быть образован в случае, когда участок поверхности зуба 142 находится в контакте с участком поверхности зуба 144 во время одностороннего контакта. Зубья 52, 72 каждой шестерни 50, 70 могут быть выполнены таким образом, чтобы профиль зубьев (или кривизна) обеспечивал односторонний контакт между двумя зубьями шестерен. Таким образом, односторонний контакт согласно изобретению может иметь место в точке или точках, вдоль линии или на участках поверхности. Соответственно, вышеописанная точка 152 контакта может быть обеспечена как часть места (или мест) контакта и не ограничивается до одной точки контакта.
В некоторых вариантах осуществления зубья соответствующих шестерен 50, 70 выполнены так, чтобы не создавать избыточное давление текучей среды между зубьями в зоне 78 контакта. Как показано на фиг. 6A, текучая среда 160 может захватываться между зубьями 142, 144, 146. Несмотря на то, что захватываемая текучая среда 160 обеспечивает эффект уплотнения между впуском насоса и выпуском насоса, во время вращения шестерен 50, 70 может накапливаться чрезмерное давление. В предпочтительном варианте осуществления профиль зубьев шестерен способствует образованию небольшого зазора 154 между зубьями 144, 146 шестерен для выпуска текучей среды под давлением. Такая конструкция поддерживает эффект уплотнения, в то же время препятствуя повышению чрезмерного давления. Разумеется, точка, линия или участок контакта не ограничиваются до стороны зуба, контактирующей со стороной другого зуба. В зависимости от типа элемента перемещения текучей среды, синхронизированный контакт может существовать между какой-либо поверхностью по меньшей мере одного выступа (например, выпуклость, удлинение, вздутие, возвышение, другая аналогичная структура или их сочетание) на первом элементе перемещения текучей среды и какой-либо поверхностью по меньшей мере одного выступа (например, выпуклость, удлинение, вздутие, возвышение, другая аналогичная структура или их сочетание) или выемки (например, полость, впадина, пустота или аналогичная структура) на втором элементе перемещения текучей среды. В некоторых вариантах осуществления по меньшей мере один из элементов перемещения текучей среды может быть выполнен из упругого материала или содержать упругий материал, например, резину, эластомерный материал или другой упругий материал, так что усилие контакта создает зону более надежного уплотнения. Дополнительные подробности о гидронасосе 10’’ и других конфигурациях насоса ведущий элемент- ведущий элемент приведены в международной заявке PCT/US2015/018342, поданной 2 марта 2015 г., и заявке на патент США № 14/637 064, поданной 3 марта 2015 г. автором изобретения, и которые включены в описание посредством ссылки в полном объеме.
Как показано на фиг. 1, в некоторых вариантах осуществления насос 10 может быть заменен насосом 10’ (см. фиг. 3) или насосом 10’’ (см. фиг. 4) в гидравлической системе 1. Кроме того, в других вариантах осуществления, вместо одного насоса 10, 10’, 10’’, может быть использовано множество насосов 10, 10’, 10’’ (или любое их сочетание), в зависимости от функциональных потребностей гидравлической системы 1. Как указано выше, множество насосов могут иметь, например, последовательное соединение или параллельное соединение.
В других вариантах осуществления один или больше насосов 10’’ могут иметь узел 2010, 2110 регулирующего клапана, расположенный внутри насоса 10’’ (или корпуса 20 насоса 10’’). Например, со ссылкой на фиг. 1 и 5, узел 2010 регулирующего клапана может быть расположен внутри корпуса 20 и вблизи отверстия 22, и узел 2110 регулирующего клапана может быть расположен внутри корпуса 20 и вблизи отверстия 24. В такой конфигурации, поскольку узлы 2010, 2110 регулирующих клапанов расположены вблизи насоса 10’’, способность реагирования на управления узлов 2010, 2110 регулирующих клапанов может быть улучшена. Кроме того, узлы 2010, 2110 клапанов заключены внутри корпуса 20 насоса 10’’, поэтому может быть достигнута компактная конструкция гидравлической системы 1. Блок 266 управления/блок 2022 привода может отслеживать давление и/или расход от каждого из насосов или узлов насоса/клапана и регулировать каждый насос или узел насоса/клапана до необходимого давления/расхода для этого насоса или узла насоса/клапана, как описано выше.
Кроме того, хотя варианты осуществления, в которых первичный привод расположен внутри элемента перемещения текучей среды были описаны в конфигурации с двумя приводными устройствами для текучей среды, специалистам в данной области будет понятно, что первичный привод может быть расположен внутри элемента перемещения текучей среды в конфигурации с одним приводным устройством для текучей среды. Например, в системе по фиг. 1, первичный привод 11 может составлять одно целое с узлом 12 перемещения текучей среды, т. е. первичный привод 11 может быть, например, электрическим двигателем, который расположен в элементе перемещения текучей среды узла 12 перемещения текучей среды. Например, шестеренный насос по фиг. 3, двигатель 2042 могут составлять одно целое с зубчатой передачей 2040.
Хотя вышеупомянутые варианты осуществления ведущий элемент-ведущий элемент и ведущий элемент-ведомый элемент были описаны в отношении устройства шестеренного насоса с внешним зацеплением, с прямозубыми цилиндрическими шестернями, имеющими зубья шестерен, и электрическими двигателями в качестве первичных приводов, специалисту в данной области будет понятно, что принципы, функции и характеристики, описанные далее, могут быль легко адаптированы к шестеренным насосам с внешним зацеплением с другими конструкциями шестерен (геликоидальные шестерни, шевронные шестерни или другие конструкции зубьев шестерни, которые могут быть приспособлены для гидравлического привода), насосам с внутренним зацеплением с различными конфигурациями шестерен, к насосам, имеющим больше, чем два первичных привода, к первичным приводам, отличающимся от электрических двигателей, например, гидравлическим двигателям или другим двигателям с гидравлическим приводом, двигателям внутреннего сгорания, газовым или другим типам двигателей, или другим аналогичным устройствам, которые могут приводить в действие элемент перемещения текучей среды, и к элементам перемещения текучей среды, отличающимся от шестеренной передачи с внешним зацеплением зубьев шестерен, например, шестеренной передаче с внутренним зацеплением зубьев шестерен, втулке (например, диск, цилиндр, другой аналогичный компонент) с выступами (например, выпуклости, удлинения, вздутия, возвышения, другие аналогичные структуры или их сочетания), втулке (например, диск, цилиндр или другой аналогичный компонент) с выемками (например, полости, впадины, пустоты или аналогичные структуры), телам шестерен с выступами, или другим аналогичным структурам, которые могут перемещать текучую среду, когда приводятся в действие. Соответственно, для краткости подробное описание различных конфигураций насосов опущено. Кроме того, специалистам в данной области будет понятно, что, в зависимости от типа насоса, синхронизированный контакт (ведущий элемент-ведущий элемент) или зацепление (ведущий элемент-ведомый элемент) может способствовать перекачиванию текучей среды вместо уплотнения обратного пути потока или в дополнение к нему. Например, в некоторых схемах героторного нсоса с внутренним зацеплением синхронизированный контакт или зацепление между двумя элементами перемещения текучей среды также способствует перекачиванию текучей среды, которая захватывается между зубьями противоположных шестерен. Кроме того, хотя в вышеописанных вариантах осуществления элементы перемещения текучей среды со схемой внешнего зацепления шестерен, специалистам в данной области будет понятно, что, в зависимости от типа элемента перемещения текучей среды, синхронизированный контакт или зацепление не ограничено контактом боковой поверхности с боковой поверхностью, и может быть между какой-либо поверхностью по меньшей мере одного выступа (например, выпуклость, удлинение, вздутие, возвышение, другая аналогичная структура или их сочетание) на одном элементе перемещения текучей среды и какой-либо поверхностью по меньшей мере одного выступа (например, выпуклость, удлинение, вздутие, возвышение, другая аналогичная структура или их сочетание) или выемки (например, полость, впадина, пустота или аналогичная структура) на другом элементе перемещения текучей среды.
Элементы перемещения текучей среды, например, шестерни в вышеописанных вариантах осуществлеения, могут быть выполнены полностью из какого-либо одного из металлического материала или неметаллического материала. Металлический материал может включать в себя, помимо прочего, сталь, нержавеющую сталь, анодированный алюминий, алюминий, титан, магний, латунь, и их соответствующие сплавы. Неметаллический материал может включать в себя, помимо прочего, керамику, пластмассу, композит, углеродное волокно и нанокомпозитный материал. Металлический материал может быть использован для насоса, который требует прочности, чтобы выдерживать, например, высокое давление. Однако для насоса, используемого для применения при низком давлении, может быть использован неметаллический материал. В некоторых вариантах осуществления элементы перемещения текучей среды могут быть выполнены из упругого материала, например, резины, эластомерного материала, например, для дополнительной надежности области уплотнения.
В качестве альтернативы элемент перемещения текучей среды, например, шестерни в вышеописанных вариантах осуществления, могут быть выполнены из комбинации различных материалов. Например, тело может быть выполнено из алюминия, а часть, которая создает контакт с другим элементом перемещения текучей среды, например, зубья шестерен в вышеописанных примерах вариантов осуществления, может быть выполнена из стали для насоса, требующего прочности, чтобы выдерживать высокое давление, пластмассы для насоса, применяемого при низком давлении, эластомерного материала или другого подходящего материала, в зависимости от типа применения.
Системы подачи текучей среды согласно примеру вариантов осуществления могут перемещать разнообразные текучие среды. Например, насосы могут быть выполнены с возможностью перекачивания рабочей жидкости, моторного масла, сырой нефти, крови, жидкого лекарственного средства (сиропа), красок, чернил, смог, связывающих веществ, расплавленных термопластиков, битума, смолы, мелассы, расплавленного шоколада, воды, ацетона, бензола, метанола или другой текучей среды. Как видно по типу перекачиваемой текучей среды, насос согласно примеру вариантов осуществления может быть использован в различных областях применения, таких как тяжелые и промышленные машины, химическая промышленность, пищевая промышленность, медицинская промышленность, промышленное применение, бытовое применение или другая промышленность, в которой используются насосы. Такие факторы как вязкость текучей среды, требуемые давления и расход для области применения, конфигурация элемента перемещения текучей среды, размер и мощность двигателя, соображения физического пространства, вес насоса или другие факторы, которые влияют на конфигурацию насоса, будут играть роль в устройстве насоса. Предполагается, что, в зависимости от типа применения, система подачи текучей среды согласно примеру вариантов осуществления, описанная выше, может иметь рабочие диапазоны, находящиеся в общем диапазоне, например, от 1 до 5000 об/мин. Конечно, данный диапазон не является ограничивающим, и возможны другие диапазоны.
Скорость работы насоса может быть определена с учетом таких факторов, как вязкость текучей среды, мощность первичного привода (например, мощность электрического двигателя, гидравлического двигателя или другого двигателя с гидравлическим приводом, двигателя внутреннего сгорания, газового или другого типа двигателя, или другого аналогичного устройства, которое может приводить в действие элемент перемещения текучей среды), размеры элемента перемещения текучей среды (например, размеры шестерни, втулки с выступами, втулки с выемками, или других аналогичных структур, которые могут перемещать текучую среду, когда приводятся в действие), требуемый расход, требуемое рабочее давление и нагрузка на подшипник насоса. В примерах вариантов осуществления, например, в областях применения типичных промышленных вариантов применения гидравлических систем, рабочая частота вращения насоса может находиться, например, в диапазоне от 300 до 900 об/мин. Кроме того, рабочий диапазон также может быть выбран в зависимости от предполагаемого назначения насоса. Например, в вышеупомянутом примере гидравлического насоса, насос, выполненный с возможностью работы в диапазоне 1-300 об/мин, может быть выбран в качестве резервного насоса, при необходимости обеспечивающего дополнительный поток в гидравлической системе. Насос, выполненный с возможностью работы в диапазоне 300-600 об/мин, может быть выбран для постоянной работы в гидравлической системе, тогда как насос, выполненный с возможностью работы в диапазоне 600-900 об/мин, может быть выбран для работы при пиковом потоке. Несомненно, единственный, общий насос может быть выполнен с возможностью обеспечения всех трех типов операций.
Области применения примеров вариантов могут включать в себя, помимо прочего, контейнерные погрузчики, колесные погрузчики, вилочные погрузчики, разработку месторождений, авиационные рабочие платформы, удаление отходов, сельское хозяйство, автокраны, строительство, лесное хозяйство и машиностроительную промышленность. Для областей применения, которые классифицируют как промышленность малого масштаба, насос согласно примеру вариантов осуществления, описанных выше, может перемещать, например, от 2 см3/об (кубических сантиметров за оборот) до 150 см3/об при давлениях в диапазоне от 1500 до 3000 фунт/дюйм². Зазор для текучей среды, т.е. допустимый зазор между зубьями шестерен и корпусом шестеренной передачи, который определяет эффективность и коэффициент проскальзывания, в этих насосах может находиться, например, в диапазоне +0,00 -0,05 мм. Для областей применения, которые классифицируют как промышленность среднего масштаба, насос согласно примеру вариантов осуществления, описанным выше, может перемещать от 150 см3/об до 300 см3/об при давлениях в диапазоне от 3000 до 5000 фунт/дюйм² и зазоре для текучей среды в диапазоне +0,00 -0,07 мм, например. Для областей применения, которые классифицируют как промышленность крупного масштаба, насос согласно примеру вариантов осуществления, описанным выше, может перемещать от 300 см3/об до 600 см3/об при давлениях в диапазоне от 3000 до 12 000 фунт/дюйм² и зазоре для текучей среды в диапазоне +0,00 -0,0125 мм, например.
Кроме того, размеры элементов перемещения текучей среды могут изменяться в зависимости от области применения насоса. Например, когда шестерни используют в качестве элементов перемещения текучей среды, окружной шаг шестерен может находиться в диапазоне от менее чем 1 мм (например, нанокомпозитный материал из нейлона) до нескольких метров в ширину в промышленном применении. Толщина шестерен будет зависеть от необходимых давлений и потоков в области применения.
Хотя изобретение раскрыто со ссылкой на конкретные варианты осуществления, возможны многочисленные модификации, переделки и изменения описанных вариантов осуществления, не отходя от сущности и объема изобретения, определяемого формулой изобретения. Соответственно, предполагается, что изобретение не ограничено описанными вариантами осуществления, а имеет полный объем, определяемый пунктами формулы изобретения и их эквивалентами.
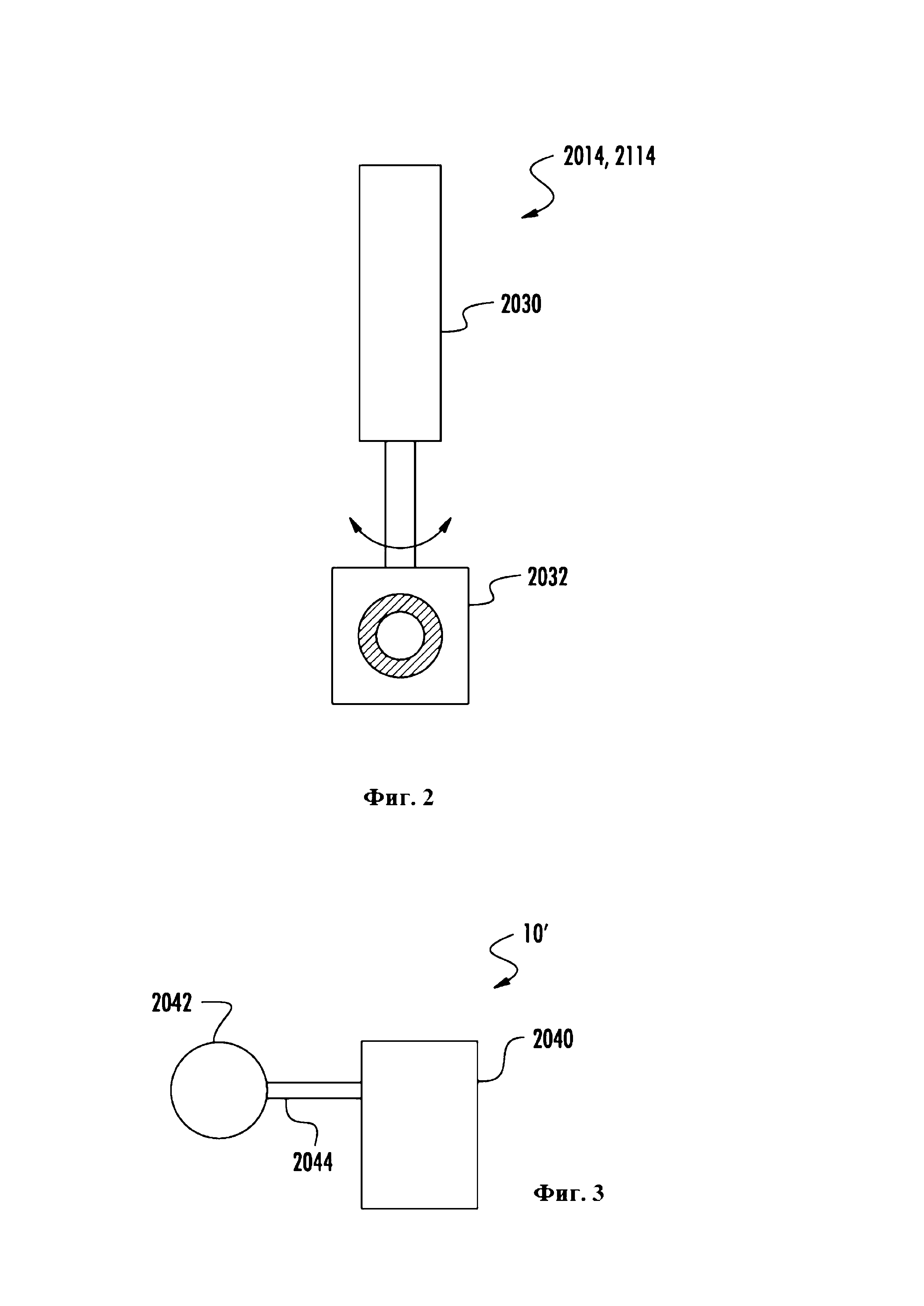
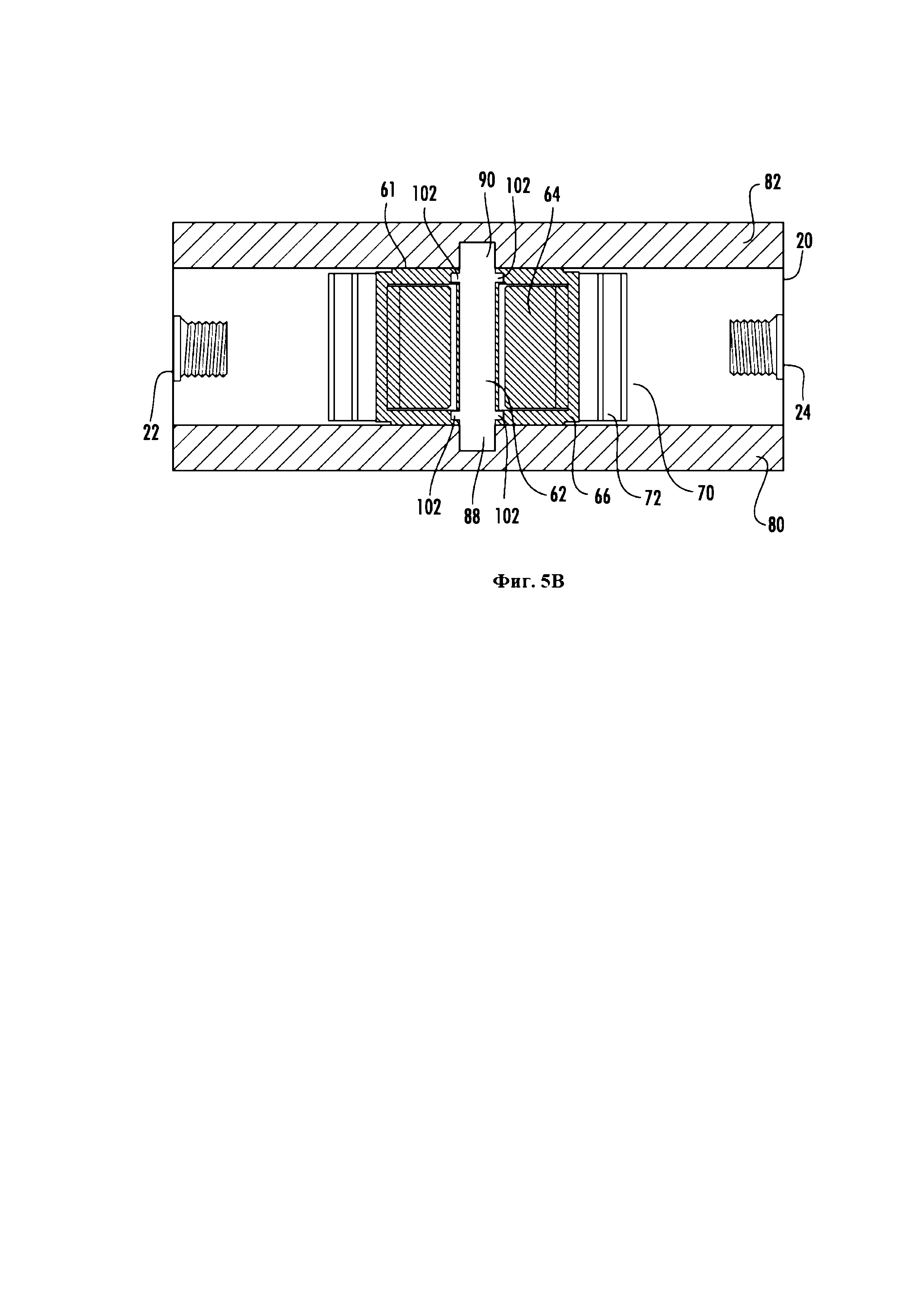
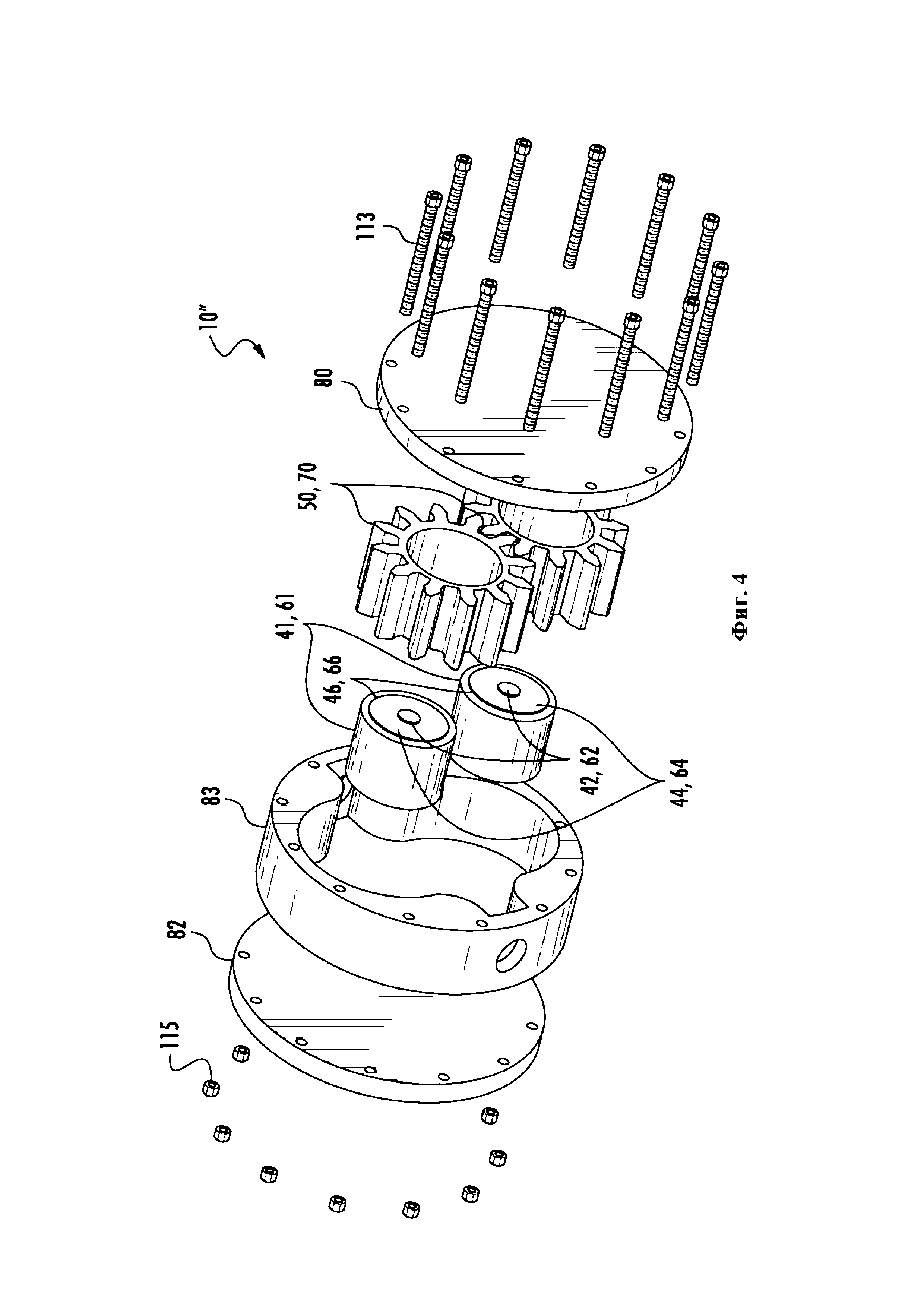
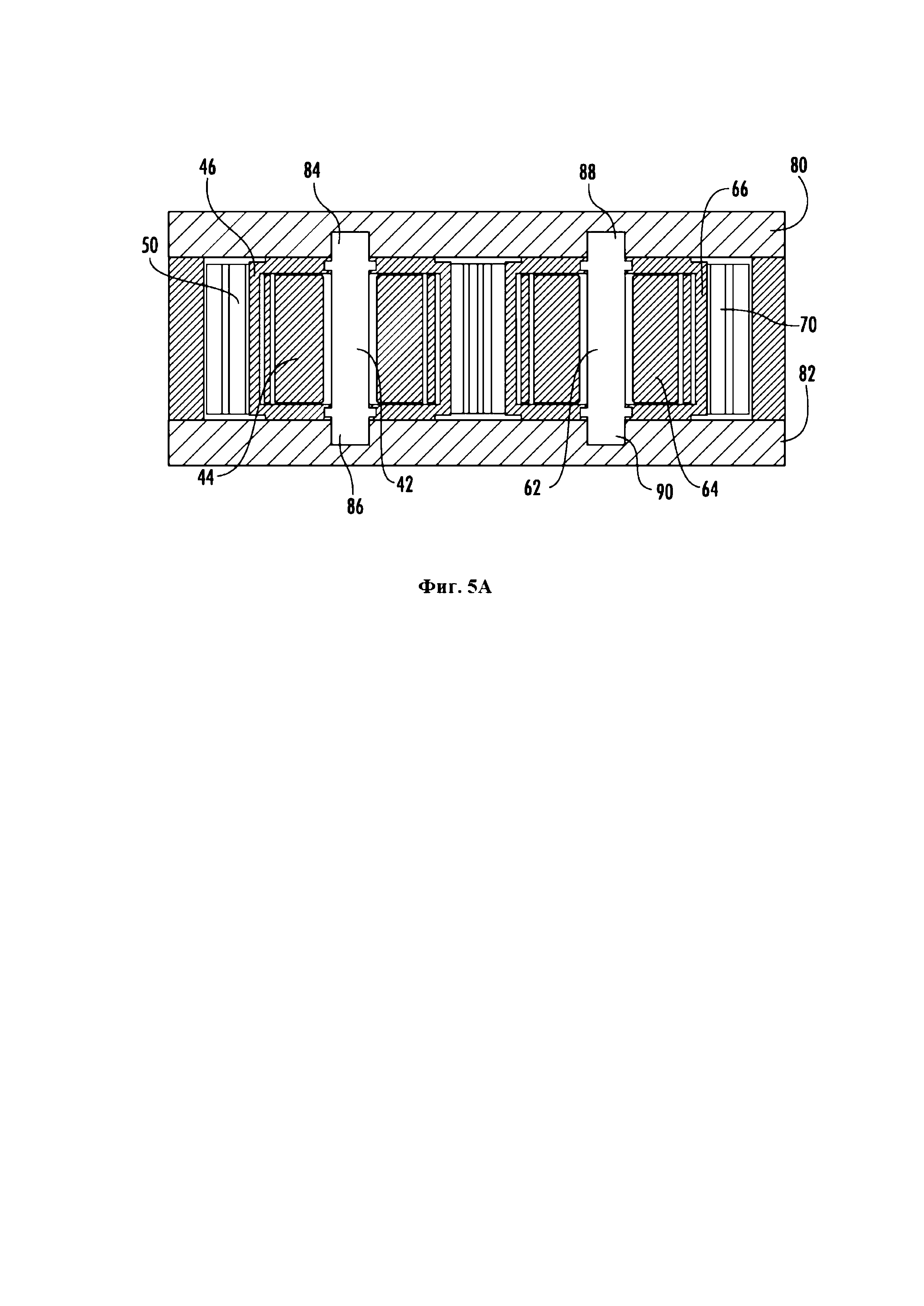
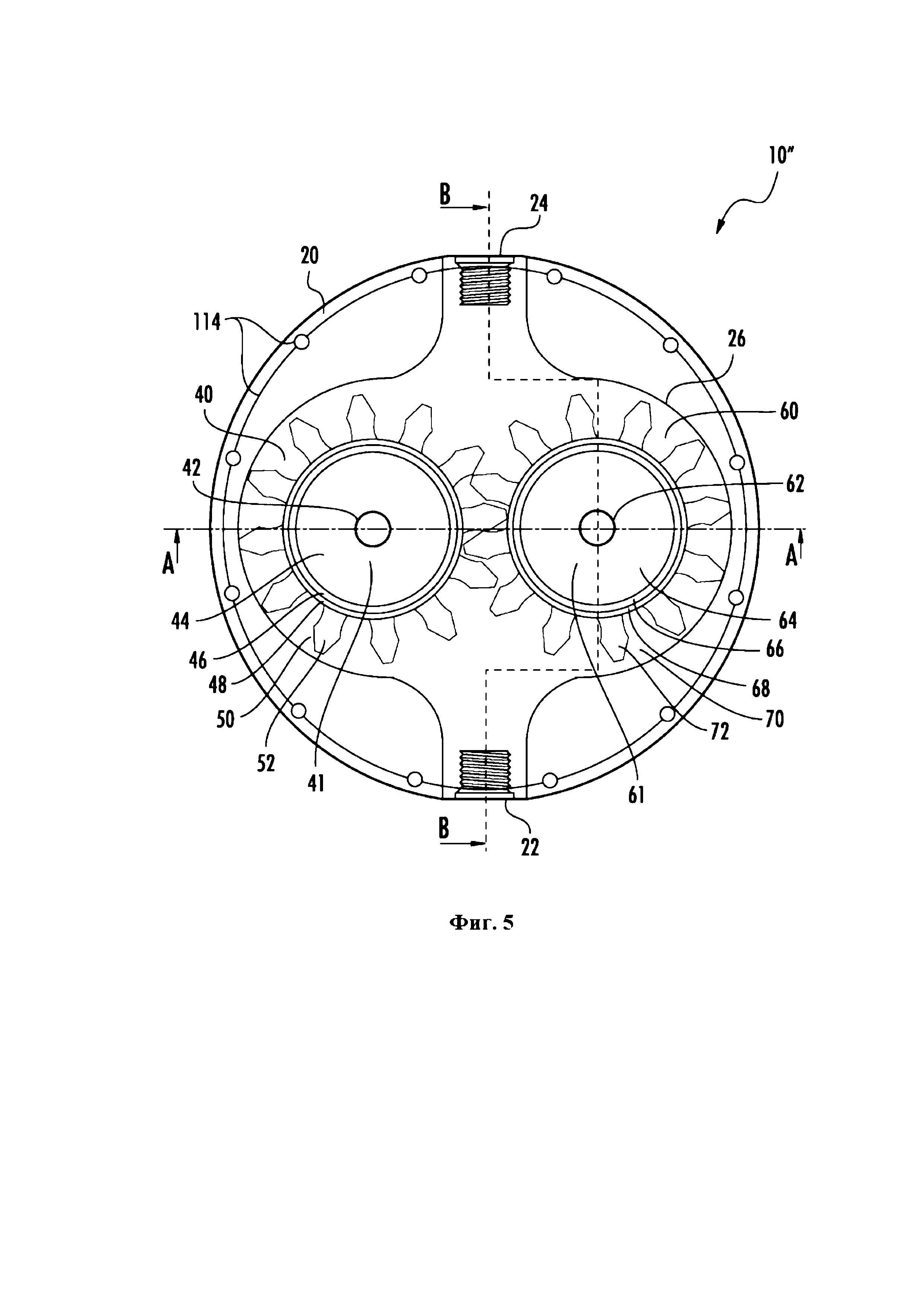
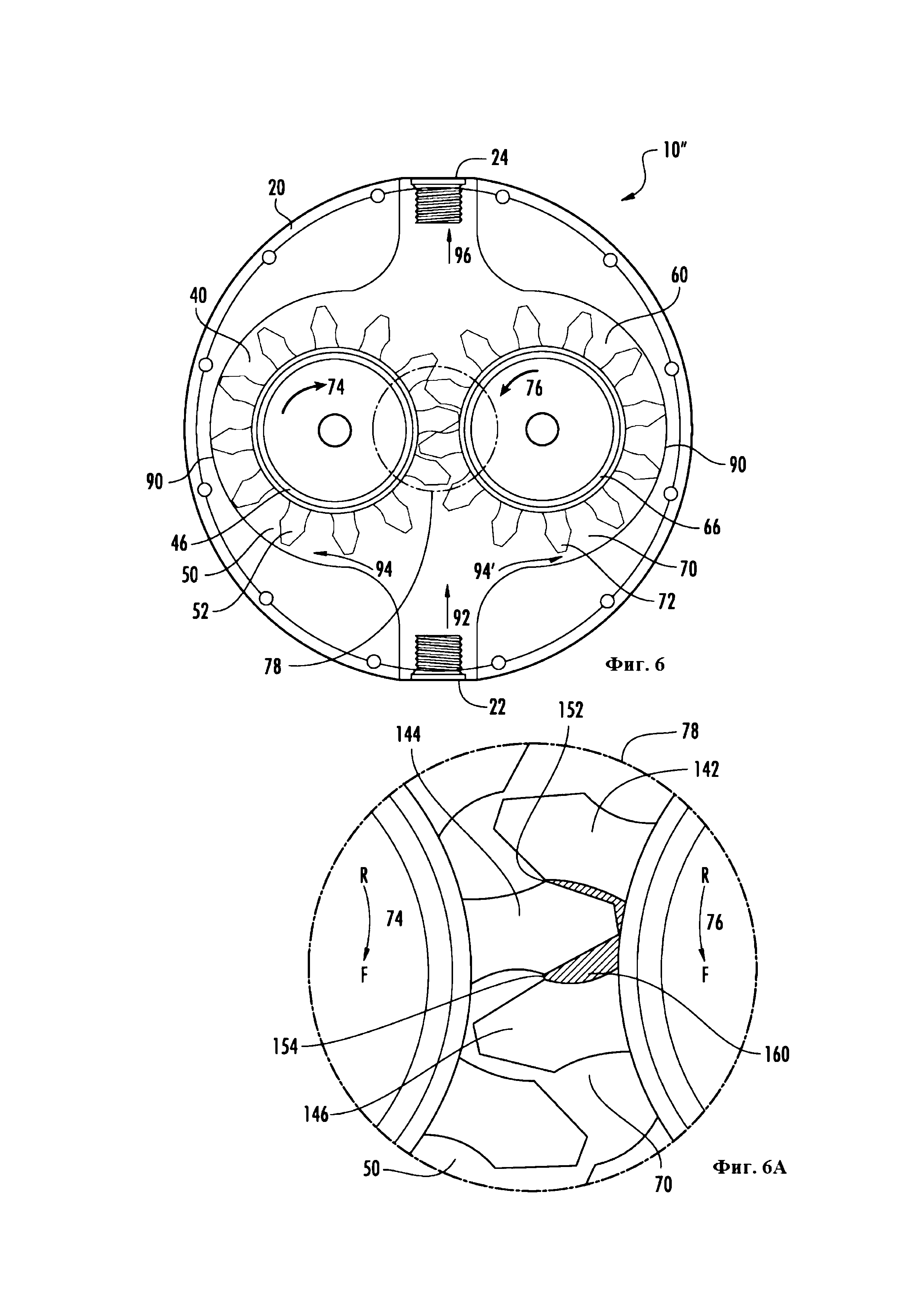
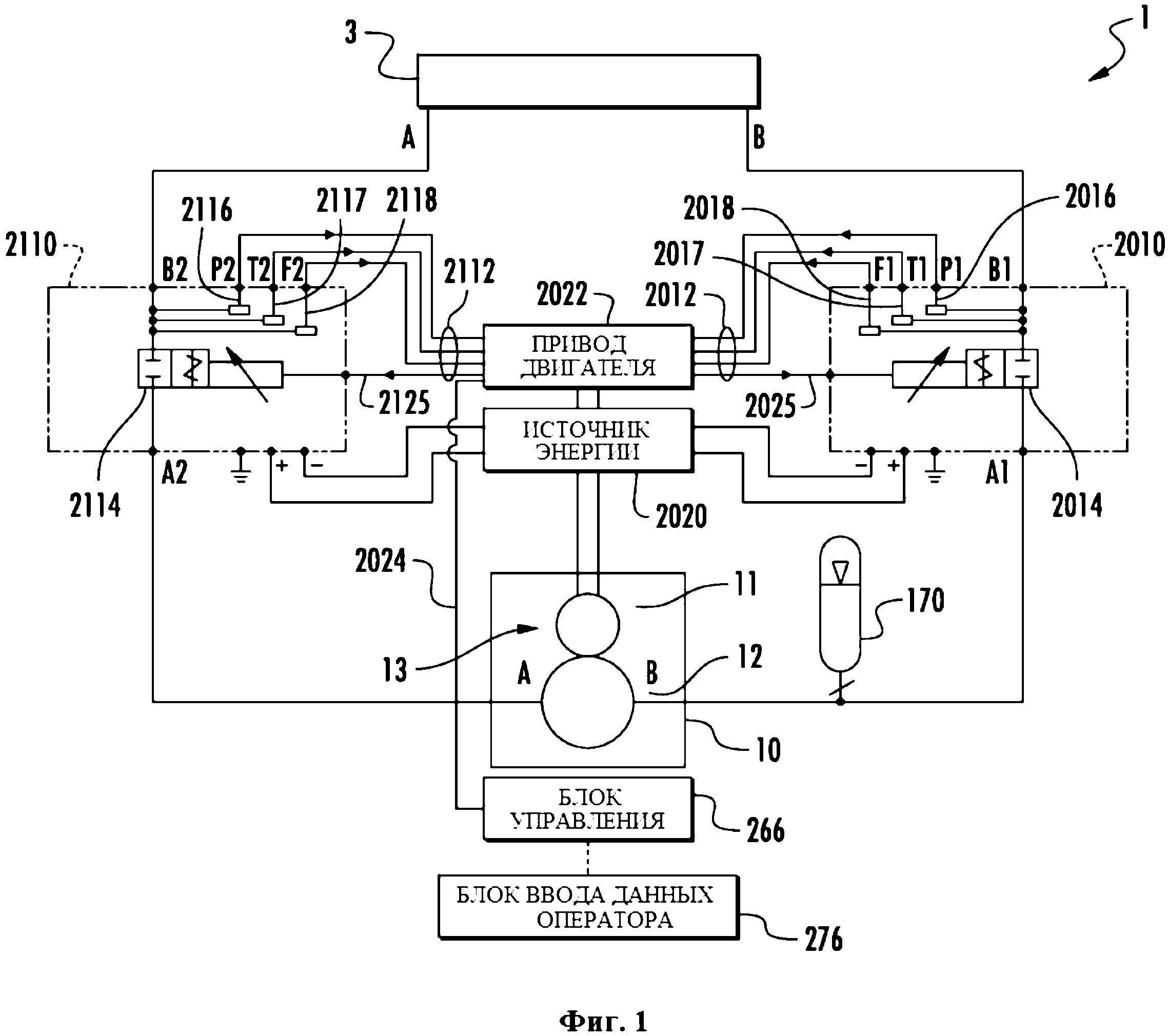
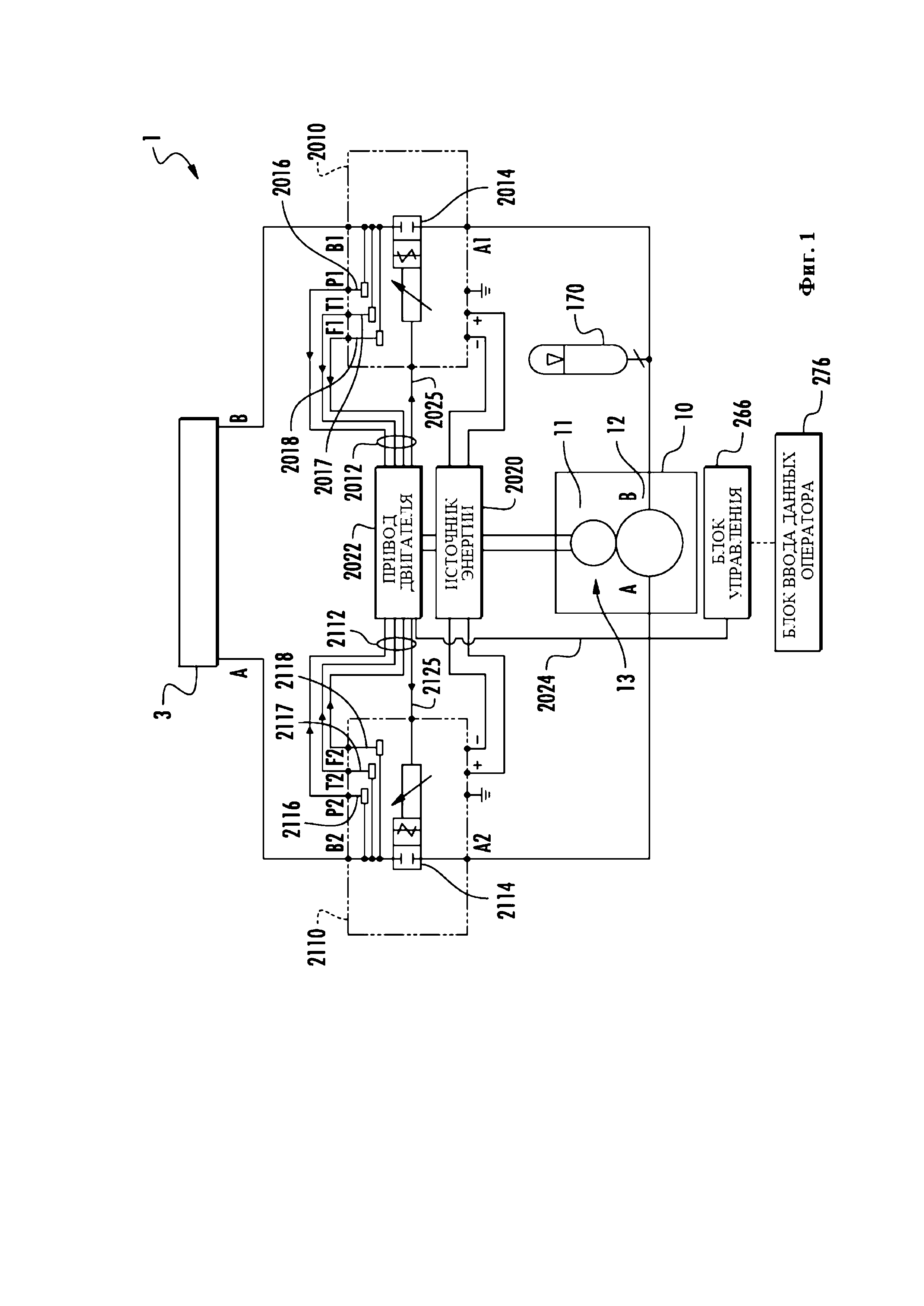
Шестеренчатый насос с внешним зацеплением, объединенный с двумя независимо приводимыми в действие первичными приводами
Насос, объединенный с двумя первичными приводами, приводимыми в действие независимо друг от друга (варианты), и способ работы насоса (варианты)
Шестеренчатый насос с внешним зацеплением, объединенный с двумя независимо приводимыми в действие первичными приводами
Насос, объединенный с двумя первичными приводами, приводимыми в действие независимо друг от друга (варианты), и способ работы насоса (варианты)

