Результат интеллектуальной деятельности: ТРАНСПОРТНОЕ СРЕДСТВО С КАЧАНИЕМ ФАР
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к фарам транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Транспортное средство типично включает в себя две фары (левую фару и правую фару). Эти фары время от времени выходят из строя, оставляя транспортное средство с единственной работающей фарой. Транспортные средства только с одной работающей фарой могут сбивать с толку других водителей. Точнее, другие водители могут ошибочно предполагать, что транспортное средство является мотоциклом в противоположность SUV (автомобилю для активного отдыха) или автомобилю с кузовом седан.
Сущность изобретения
Транспортное средство, совместимое с настоящим изобретением, включает в себя: адаптивные фары, каждая из которых выполнена с возможностью создавать эффект непрерывного качания пучка, процессор(ы), выполненный с возможностью: (a) выявлять выход из строя адаптивной фары; (b) управлять работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании (a). Работающая адаптивная фара добивается эффекта непрерывного качания пучка посредством (1) непрерывного циклического прохождения множества профилей пучка, или (2) непрерывного поворачивания фар с помощью электродвигателя(ей).
Одним аспектом изобретения является транспортное средство, содержащее адаптивные фары, каждая из которых выполнена с возможностью создавать эффект непрерывного качания пучка, и процессор(ы), выполненный с возможностью:
(a) выявлять выход из строя адаптивной фары;
(b) управлять работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании этапа (a).
При этом, работающая адаптивная фара добивается эффекта непрерывного качания пучка посредством (a) непрерывного циклического прохождения множества профилей пучка, или (b) непрерывного поворачивания фар с помощью электродвигателя(ей).
При этом, процессор(ы) выполнен с возможностью управлять работающей адаптивной фарой для создания эффекта непрерывного качания пучка с привязкой к синусоидальной кривой.
При этом, синусоидальная кривая соотносит множество моментов времени с множеством профилей пучка.
При этом, процессор(ы) выполнен с возможностью (c) определять встречное движение транспорта с помощью локального датчика(ов), и (b) управлять работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании этапов (a) и (c).
При этом, процессор(ы) выполнен с возможностью непрерывно циклически проходить множество профилей пучка согласно синусоидальной кривой; Синусоидальная кривая имеет ось X времени и ось Y, сегментированную согласно множеству профилей пучка.
При этом, процессор(ы) выполнен с возможностью управлять адаптивными фарами для создания эффекта непрерывного качания пучка на основании выявленного местоположения транспортного средства по GPS.
При этом, процессор(ы) выполнен с возможностью: настраивать частоту синусоидальной кривой на основании выявленной скорости транспортного средства или выявленного ускорения транспортного средства.
При этом, процессор(ы) выполнен с возможностью выявлять маневр движения на повороте на основании угла поворота управляемых колес, деактивировать эффект непрерывного качания пучка во время маневра движения на повороте.
При этом, процессор(ы) выполнен с возможностью (c) выбирать размах качания пучка на основании скорости транспортного средства, и
(b) управлять работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании (a) и (c).
Другим аспектом изобретения является способ, состоящий в том, что, с помощью процессора(ов) транспортного средства, имеющего адаптивные фары, каждая из которых выполнена с возможностью создавать эффект непрерывного качания пучка,
(a) выявляют выход из строя адаптивной фары и (b) управляют работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании этапа (a).
При этом, работающая адаптивная фара добивается эффекта непрерывного качания пучка посредством (a) непрерывного циклического прохождения множества профилей пучка, или (b) непрерывного поворачивания фар с помощью электродвигателя(ей).
При этом, работающей адаптивной фарой управляют для создания эффекта непрерывного качания пучка с привязкой к синусоидальной кривой.
При этом, синусоидальная кривая соотносит множество моментов времени с множеством профилей пучка.
Также, способ содержит этап, на котором (c) определяют встречное движение транспорта с помощью локального датчика(ов), и (b) управляют работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании (a) и (c).
Также, способ содержит этап, на котором непрерывно циклически проходят множество профилей пучка согласно синусоидальной кривой; Синусоидальная кривая имеет ось X времени и ось Y, сегментированную согласно множеству профилей пучка.
Также, способ содержит этап, на котором управляют обеими адаптивными фарами для создания эффекта непрерывного качания пучка на основании выявленного местоположения транспортного средства по GPS.
Также, способ содержит этап, на котором настраивают частоту синусоидальной кривой на основании выявленной скорости транспортного средства или выявленного ускорения транспортного средства.
Также, способ содержит этап, на котором выявляют маневр движения на повороте на основании угла поворота управляемых колес, и деактивируют эффект непрерывного качания пучка во время маневра движения на повороте.
Также, способ содержит этапы, на которых (c) выбирают размах качания пучка на основании скорости транспортного средства и (b) управляют работающей адаптивной фарой для создания эффекта непрерывного качания пучка на основании этапов (a) и (c).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, может быть сделана ссылка на варианты осуществления, показанные на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылок обозначают соответствующие части на всем протяжении нескольких видов.
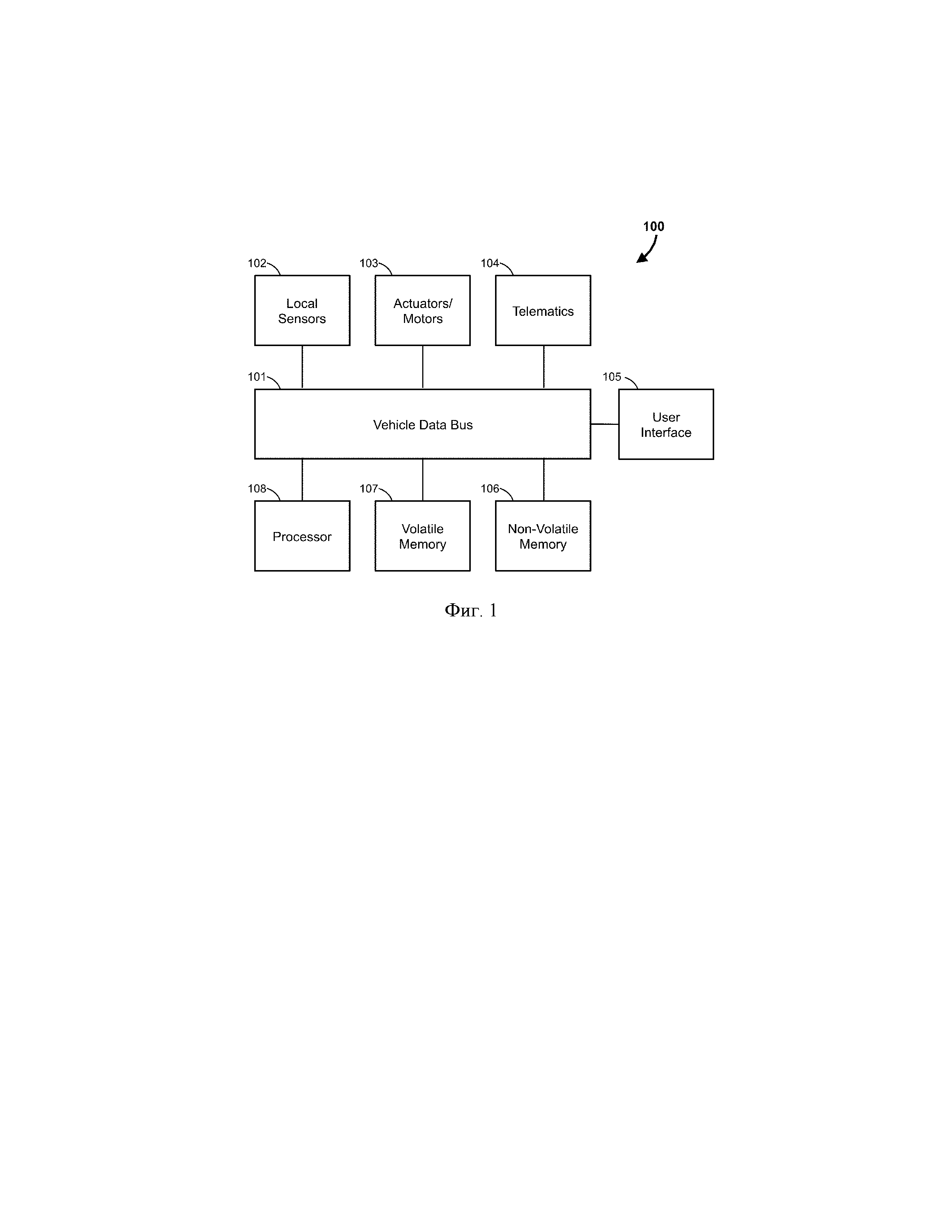
Фиг. 1 - структурная схема вычислительной системы транспортного средства.
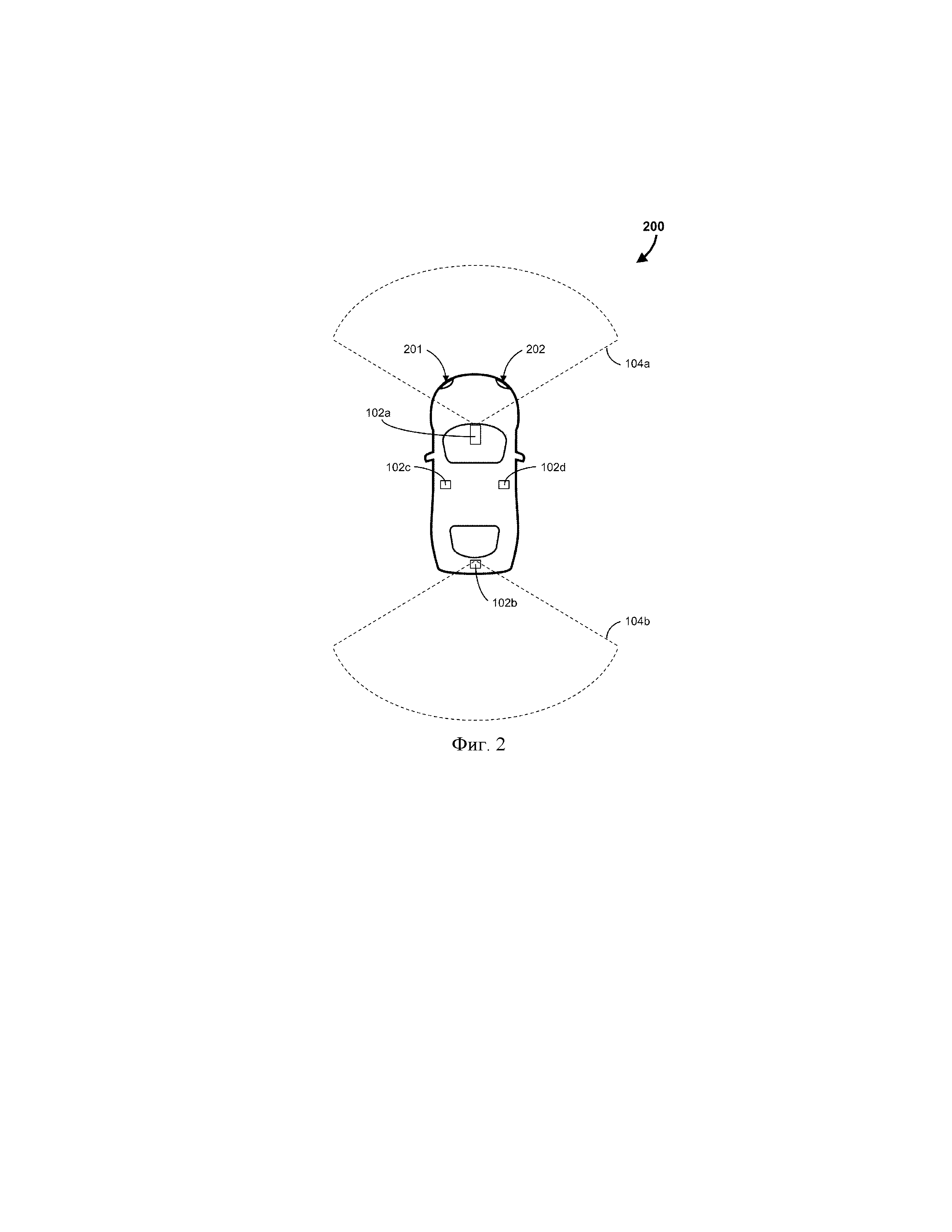
Фиг. 2 - схема транспортного средства, включающего в себя вычислительную систему транспортного средства.
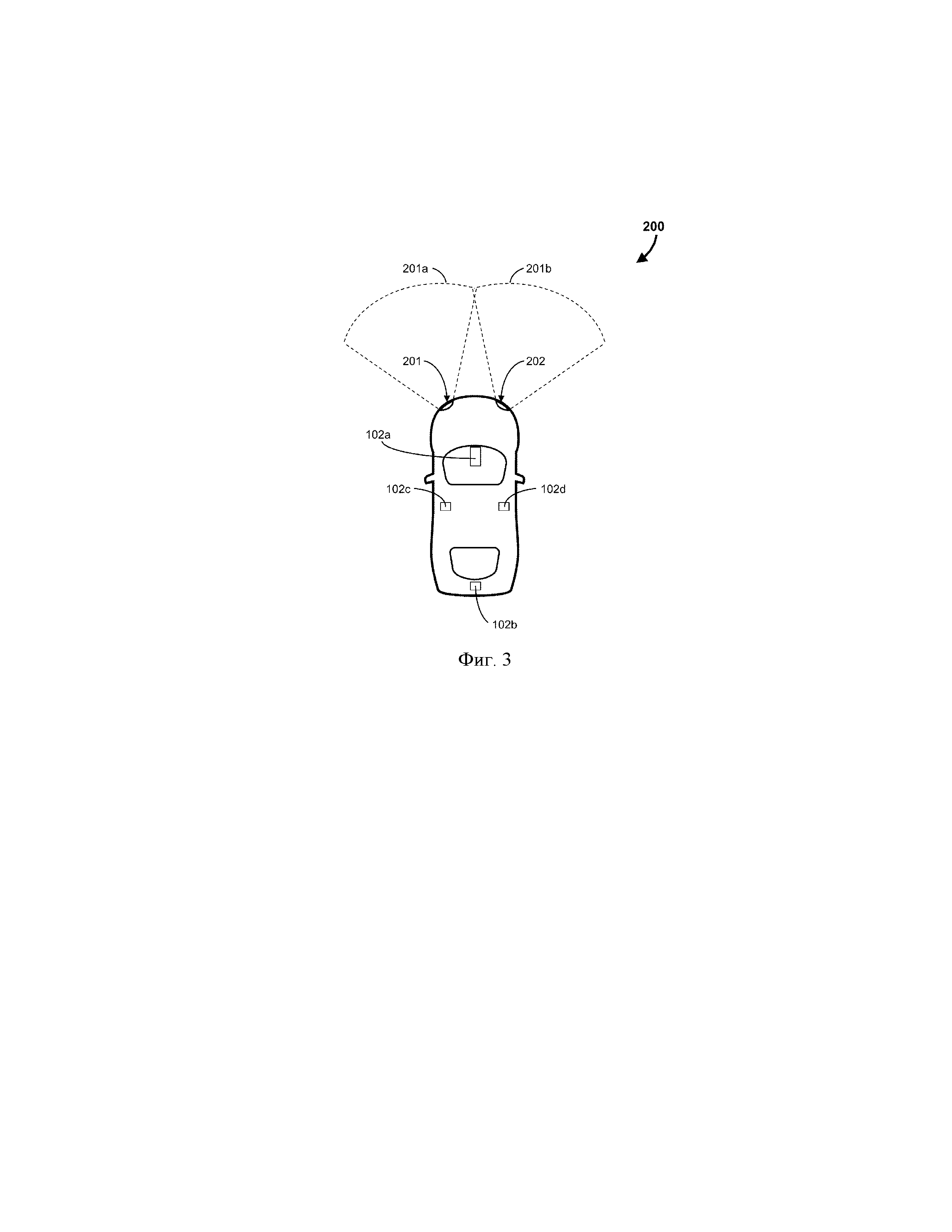
Фиг. 3 - схема транспортного средства.
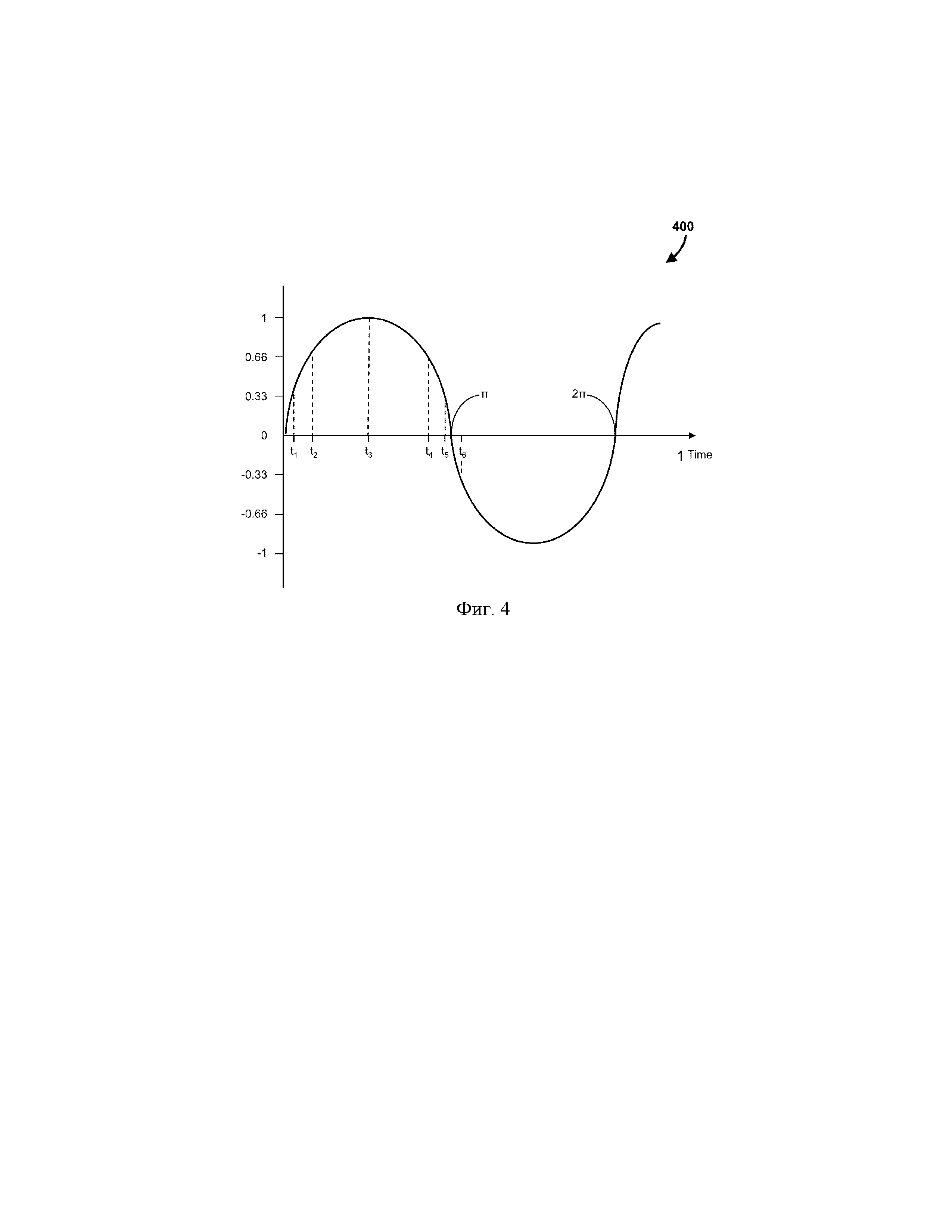
Фиг. 4 - график синусоидальной кривой, которая связывает моменты времени с профилями пучка.
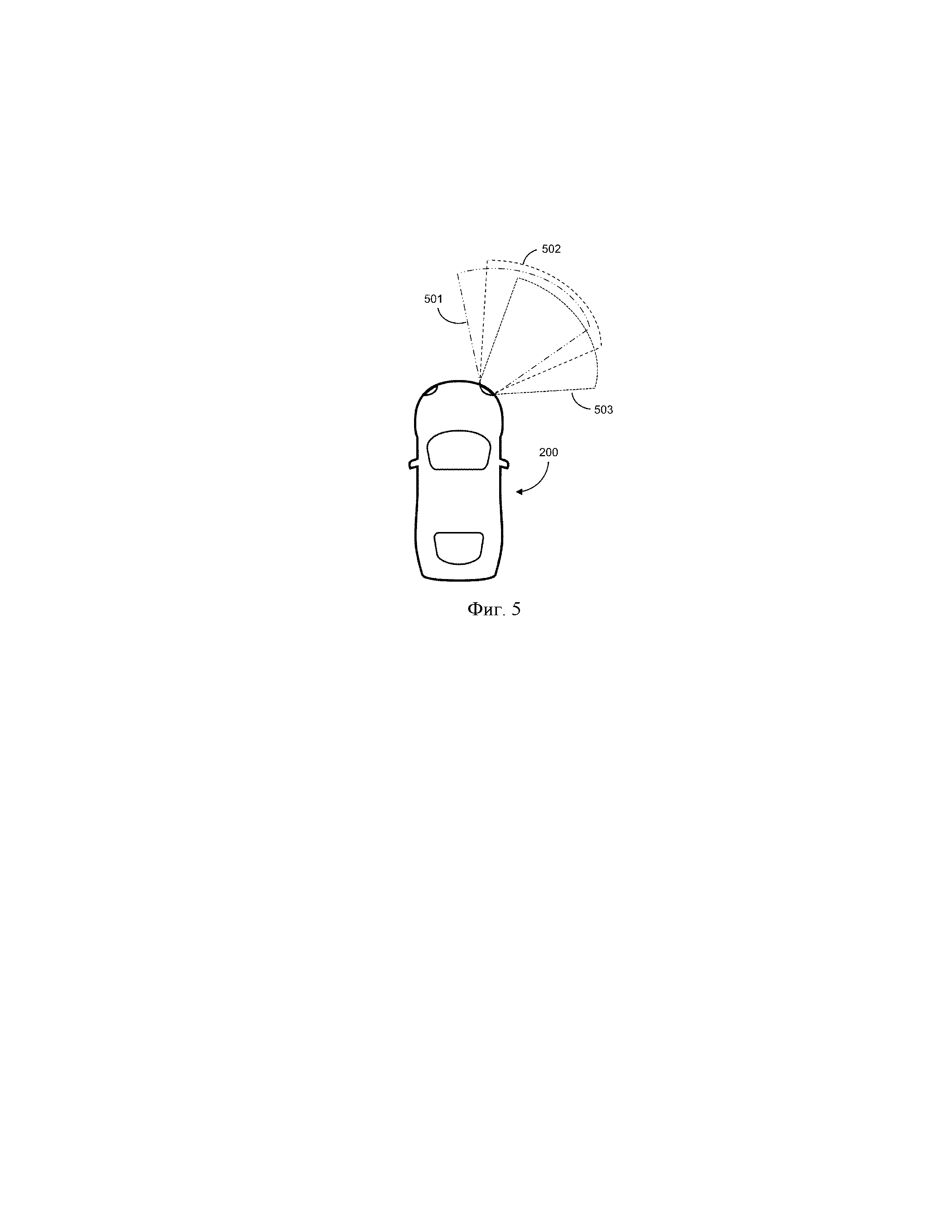
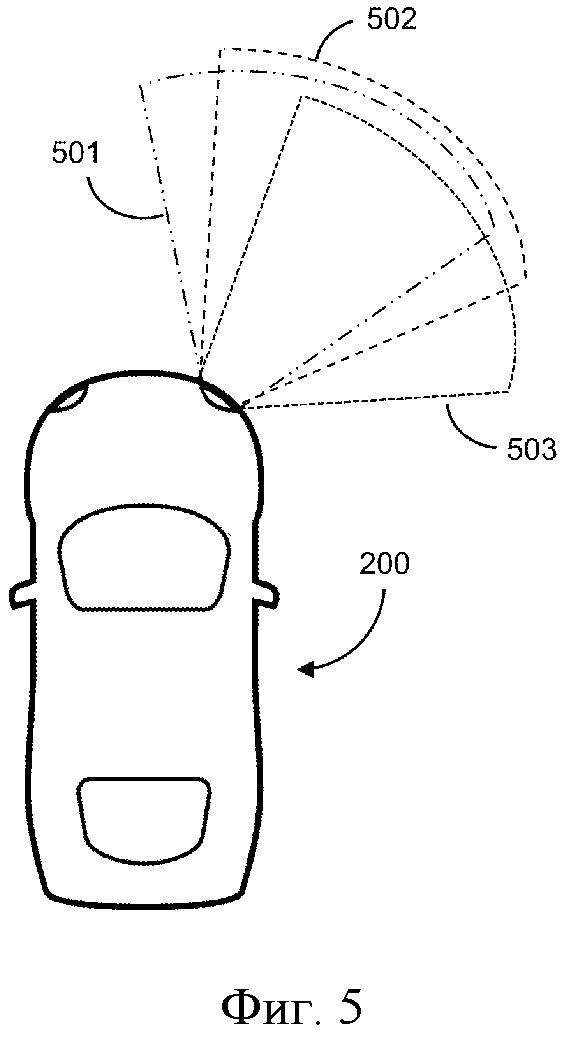
Фиг. 5 показывает различные профили пучка.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
В этой заявке подразумевается, что использование дизъюнктивных суждений должно включать в себя конъюнктивное суждение. Использование формы единственного числа не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на определенный объект или неопределенный объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, в качестве одного из возможных вариантов, и взаимоисключающих альтернатив, в качестве другого возможного варианта. Другими словами, конъюнкцию «или» следует понимать включающей в себя «и/или» в качестве одного из возможных вариантов и «любой из/или» в качестве другого возможного варианта.
Фиг. 1 показывает вычислительную систему 100 примерного транспортного средства 200. Транспортное средство 200 также указывается ссылкой как первое транспортное средство 200. Транспортное средство 200 включает в себя электродвигатель, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение электродвигателем, и систему рулевого управления, выполненную с возможностью поворачивать по меньшей мере одно колесо вокруг оси. Пригодные транспортные средства, например, также описаны в заявке № 14/991,496 на выдачу патента США на Миллера и других (у «Миллера») и патенте США под № 8,180,547 на Прасада и других (у «Прасада»), оба из которых настоящим включены в состав посредством ссылки во всей своей полноте. Вычислительная система 100 дает возможность автоматического управления механическими системами в транспортном средстве. Она также дает возможность обмена информацией с внешними устройствами. Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательский интерфейс 105, телематический блок 104, исполнительные механизмы и электродвигатели 103, и локальные датчики 102.
Шина 101 данных транспортирует электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными, чтобы вырабатывать модифицированные электронные сигналы или данные. Энергозависимая память 107 хранит данные для непосредственной выборки процессором 108. Энергонезависимая память 106 хранит данные для выборки в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя диапазон энергонезависимых устройств памяти, в том числе, накопитель на жестких дисках, SSD (твердотельные диски), DVD (цифровые многофункциональные диски), Blu-Ray, и т. д. Пользовательский интерфейс 105 включает в себя устройства отображения, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые дают возможность взаимодействия пользователя с вычислительной системой. Телематический блок 104 дает возможность как проводной, так и беспроводной связи с внешними процессорами через Bluetooth, сотовую систему передачи данных (например, 3G, LTE), USB, и т. д. Телематический блок 104 может быть выполнен с возможностью широковещательно передавать сигналы на определенной частоте.
Исполнительные механизмы/электродвигатели 103 создают физические результаты. Примеры исполнительных механизмов/электродвигателей включают в себя топливные форсунки, рулевой механизм, электродвигатель для передачи крутящего момента на колеса, стеклоочистители, схемы тормозных фонарей, схемы фар, трансмиссии, подушки безопасности, тактильные электродвигатели или двигатели, и т. д. Локальные датчики 102 передают цифровые показания или измерения в процессор 108. Примеры пригодных датчиков включают в себя датчики температуры, датчики угла поворота, датчики ремня безопасности, датчики скорости, камеры, датчики с лазерным локатором, датчики с радиолокатором, ультразвуковые датчики, инфракрасные датчики, и т. д. Следует принимать во внимание, что различные связанные компоненты по фиг. 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности о конструкции и операциях вычислительной системы 100, например, описаны у Миллера и/или Прасада.
Фиг. 2 в целом показывает и иллюстрирует транспортное средство 200, которое включает в себя вычислительную систему 100. Хотя и не показано, транспортное средство 200 находится на оперативной беспроводной связи с переносным устройством, таким как мобильный телефон. Некоторые из локальных датчиков 102 установлены на внешней стороне транспортного средства 200. Локальный датчик 102a может быть ультразвуковым датчиком, датчиком с лазерным локатором, камерой, видеокамерой и/или микрофоном, и т. д. Локальный датчик 102a может быть выполнен с возможностью выявлять объекты, движущиеся впереди транспортного средства 200, как указано передней областью 109a восприятия. Локальный датчик 102b может включать в себя один или более из ультразвукового датчика, датчика с лазерным локатором, инфракрасного датчика, камеры, видеокамеры и/или микрофона, и т. д. Локальный датчик 102b может быть выполнен с возможностью выявлять объекты, движущиеся сзади транспортного средства 200, как указано задней областью 109b восприятия. Левый датчик 102c и правый датчик 102d могут быть выполнены с возможностью выполнять идентичные функции для левой и правой сторон транспортного средства 200. Транспортное средство 200 включает в себя ведущий узел других датчиков 102, расположенных во внутренней области транспортного средства или на внешней стороне транспортного средства. Эти датчики могут включать в себя какие-нибудь или все из датчиков, раскрытых у Прасада.
Следует принимать во внимание, что транспортное средство 200 выполнено с возможностью выполнять способы и операции, описанные ниже. В некоторых случаях, транспортное средство 200 выполнено с возможностью выполнять эти функции с помощью компьютерных программ, хранимых на энергозависимых и/или энергонезависимых устройствах памяти вычислительной системы 100. Процессор выполнен с возможностью выполнять раскрытую операцию, когда процессор находится на оперативной связи с памятью, хранящей программно реализованную программу с управляющей программой или командами, воплощающими раскрытую операцию. Дополнительное описание того, каким образом совместно действуют процессор, устройства памяти и программы, фигурирует у Прасада. Следует принимать во внимание, что переносное устройство и/или внешний сервер на оперативной связи с транспортным средством 200 выполняют некоторые или все из способов и операций, обсужденных ниже.
Согласно различным вариантам осуществления, транспортное средство 200 является транспортным средством 100a по Прасаду. Согласно различным вариантам осуществления, вычислительной система 100 является VCCS 102 с фиг. 2 по Прасаду. Согласно различным вариантам осуществления, транспортное средство 200 находится на связи с некоторыми или всеми из устройств, показанных на фиг. 1 по Прасаду, в том числе, переносным устройством 110, связной вышкой 116, телекоммуникационной сетью 118, сетью 120 Интернет и центром 122 обработки данных.
Термин «снаряженное транспортное средство», когда используется в формуле изобретения, настоящим определен, чтобы означать: «транспортное средство, включающее в себя: электродвигатель, множество колес, источник питания и систему рулевого управления; при этом, электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, источник питания подает энергию на электродвигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес». Термин «оборудованное транспортное средство с электрическим приводом», когда используется в формуле изобретения, настоящим определен, чтобы означать: «транспортное средство, включающее в себя: аккумуляторную батарею, множество колес, электродвигатель, систему рулевого управления; при этом, электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, аккумуляторная батарея является перезаряжаемой и выполнена с возможностью подавать электроэнергию на электродвигатель, тем самым, возбуждая электродвигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес».
Как показано на фиг. 2 и 3, транспортное средство 200 включает в себя левую фару 201 и правую фару 202. Фары 201, 202 являются адаптивными, означая, что фары 201, 202 выполнены с возможностью проецировать пучок света, имеющий профиль, основанный на угле поворота управляемых колес и/или скорости транспортного средства 200. Согласно различным вариантам осуществления, фары 201, 202 имеют конструкцию системы 10 ближнего света, описанную в патенте США под № 8,433,479 на Лукакса и других («Лукакса»), которая настоящим включена в состав посредством ссылки во всей своей полноте.
Точнее, одна из фар 201, 202 может иметь конфигурацию, показанную на фиг. 1 по Лукаксу. Другая фара 202, 201 может иметь зеркальное отображение конфигурации, показанной на фиг. 1 по Лукаксу. Согласно различным вариантам осуществления, транспортное средство 200 выполнено с возможностью управлять фарами 201, 202 с помощью некоторых или всех функций и операций, описанных у Лукакса, и, таким образом, транспортное средство 200 по настоящему изобретению может совместно использовать некоторые или все из признаков транспортного средства, описанных у Лукакса.
Как показано на фиг. 1 у Лукакса, каждая из фар 201, 202 по настоящему изобретению может включать в себя основной источник света и множество вспомогательных источников света. Как показано на фиг. 2 у Лукакса, транспортное средство 200 по настоящему изобретению настраивает профиль пучка фар, вводя в действие, выводя из работы и/или настраивая вспомогательные источники света. Как показано на фиг. 3 у Лукакса, транспортное средство 200 по настоящему изобретению настраивает профиль пучка на основании угла поворота управляемых колес и скорости транспортного средства (когда активно адаптивное рулевое управление). В качестве альтернативы или в дополнение к вспомогательным источникам света, транспортное средство 200 может быть выполнено с возможностью поворачивать основной источник света вокруг вертикальной оси (аналогично маяку). Двигатель приводит в действие поворачивание основного источника света. Транспортное средство управляет электродвигателем на основании угла поворота управляемых колес и скорости транспортного средства (когда активно адаптивное рулевое управление).
Таким образом, следует принимать во внимание, что транспортное средство 200 оборудовано, чтобы манипулировать профилем пучка с помощью по меньшей мере одной из двух возможных конфигураций фар: (a) вводя в действие, выводя из работы и/или настраивая вспомогательные фары; (b) поворачивая основную фару вокруг продолжающейся вертикально оси.
Обсуждение, которое следует, относится к управлению профилем пучка, происходящим из одной из фар, в ту и в другую сторону, чтобы имитировать самоориентирующуюся фару. Это указывается ссылкой как эффект качания. Когда транспортное средство 200 оборудовано конфигурацией (b), транспортное средство 200 дает команду электродвигателю поворачивать фару в ту и в другую сторону вокруг вертикальной оси и, таким образом, добивается эффекта качания. Когда транспортное средство 200 оборудовано конфигурацией (a), транспортное средство 200 может имитировать поворотное движение (и таким образом добиваться эффекта качания), циклически проходя вперед и назад последовательность предопределенных профилей пучка (каждый профиль пучка является связанным с уровнем мощности основной фары и уровнем мощности вспомогательной фары для каждой из вспомогательных фар).
Например, транспортное средство 200 может добиваться профиля (1) пучка, вводя в действие основную фару и ни одну из вспомогательных фар, чтобы формировать профиль пучка, который продолжается в целом параллельно прямой дороге. Транспортное средство 200 может добиваться профиля (2) пучка, вводя в действие основную фару и некоторые из вспомогательных фар для формирования профиля пучка, который продолжается под углом 5 градусов относительно в целом прямой дороги. Транспортное средство 200 может добиваться профиля (3) пучка, вводя в действие основную фару и все из вспомогательных фар для формирования профиля пучка, который продолжается под углом 10 градусов относительно в целом прямой дороги.
Фиг. 5 в целом показывает и иллюстрирует три профиля пучка. Транспортное средство 200 циклически проходит между первым профилем 501 пучка, вторым профилем 502 пучка и третьим профилем 503 пучка. Первый профиль 501 пучка параллелен с дорогой. Второй профиль пучка находится под углом X относительно дороги. Третий профиль пучка находится под углом 2*X относительно дороги. Первый профиль 501 пучка может быть профилем (1) пучка, второй профиль 502 пучка может быть профилем (2) пучка, а третий профиль 503 пучка может быть профилем (3) пучка.
Когда транспортное средство 200 оборудовано конфигурацией (b), транспортное средство 200 имитирует поворотное движение фары (то есть, формирует эффект качания), циклически проходя профили пучка согласно следующему массиву: [профиль (1) пучка, профиль (2) пучка, профиль (3) пучка, профиль (2) пучка, профиль (1) пучка, профиль (2) пучка, профиль (3) пучка, и т. д.]. С дополнительными профилями пучка (например, 20 профилями пучка), транспортное средство 200 может обеспечивать более аутентичную имитацию. Фиг. 4, подробно обсужденная ниже, иллюстрирует процесс циклического прохождения массива.
Вышеприведенное изобретение указывает ссылкой на угол профилей пучка. Профили пучка типично замысловаты и не соблюдают простые взаимные расположения плоскостей. Например, смотрите фиг. с 3 по 7 публикации № 2004/0114379 патента США на Миллера и других («Миллера-2»), которая настоящим включена в состав посредством ссылки во всей своей полноте. Таким образом, следует принимать во внимание, что угол профилей пучка может соответствовать углам поворота управляемых колес, которые, в нормальных условиях адаптивных фар, служили бы причиной профиля пучка. Например, когда водитель поворачивает на 5 градусов влево на скорости X, транспортное средство 200 реализует профиль пучка, соответствующий углу поворота управляемых колес 5 градусов. Когда водитель поворачивает на 10 градусов влево на скорости X, транспортное средство 200 реализует профиль пучка, соответствующий углу поворота управляемых колес 10 градусов. Эти соотношения, например, раскрыты у Лукакса и Миллера-2. Таким образом, со ссылкой на фиг. 5, первый профиль 501 пучка может соответствовать профилю пучка, связанному, во время адаптивного рулевого управления, с углом поворота управляемых колес от 0 до 10 градусов вправо. Второй профиль 502 пучка может соответствовать профилю пучка, связанному, во время адаптивного рулевого управления, с углом поворота управляемых колес от 10 до 20 градусов вправо. Третий профиль 503 пучка может соответствовать профилю пучка, связанному, во время адаптивного рулевого управления, с углом поворота управляемых колес от 20 до 30 градусов вправо.
Таким образом, следует принимать во внимание, что фары добиваются эффекта качания с помощью конфигурации (a), циклически проходя профили, как описано выше, чтобы имитировать самоориентирующуюся фару, и с помощью конфигурации (b), физически поворачивая фары посредством электродвигателей фары.
Как обсуждено ранее, транспортное средство 200 включает в себя две фары 201, 202. Одна из этих фар (например, левая фара 201) может выходить из строя вследствие ряда обстоятельств: может становиться поврежденной электропроводка фар, фара может перегореть, и т. д. В таких обстоятельствах, и как обсуждено ранее, только одна фара (например, правая фара 202) останется работающей. Это может создавать угрозу безопасности, так как встречные участники движения, особенно ночью, могут предполагать, что транспортное средство 200 является мотоциклом или велосипедом в противоположность автомобилю с кузовом седан, грузовому автомобилю или SUV.
Настоящее изобретение применяет эффект качания для предупреждения встречного участника движения, что транспортное средство 200 не является мотоциклом или велосипедом, но, взамен, автомобилем с кузовом седан или SUV, который включает в себя две отдельных фары. Эффект качания также может сообщать скорость или ускорение транспортного средства 200 встречным участникам движения и разгонять животных, таких как олени. Соответственно, транспортное средство 200 выполнено с возможностью (a) выявлять, когда одна из фар вышла из строя, и (b) создавать эффект качания.
Транспортное средство 200 выявляет выход из строя фары на основании одного или более из: (a) измеренных тока и/или напряжения у фары, (b) соответствующего пользовательского ввода, (c) данных, зарегистрированных передним локальным датчиком 102a транспортного средства (например, изображения, снятые локальным датчиком 102a транспортного средства, необычно темны и/или не показывают пучок фары).
При выявлении выхода из строя одной из фар 201, 202, транспортное средство 200 автоматически приводит в действие эффект качания. Когда оборудовано конфигурацией (a), транспортное средство 200 начинает циклическое прохождение массива предопределенных профилей пучка. Когда оборудовано конфигурацией (b), транспортное средство 200 начинает поворачивание или вращение работающей (то есть, оставшейся) фарой с помощью электродвигателя.
Для обеих конфигураций (a) и (b), транспортное средство 200 выбирает размах качания. Размах качания является углом, определенным разностью между профилем пучка из массива, установленным под углом в крайнее левое положение, и профилем пучка из массива, установленным под углом в крайнее правое положение (как обсуждено ранее, если транспортное средство оборудовано конфигурацией (b), то угол профиля пучка может соответствовать углу поворота управляемых колес, обычно связанному с профилем пучка). Транспортное средство 200 выполнено с возможностью выбирать размах качания на основании различных входных данных. Например, транспортное средство 200 может выбирать размах качания 10 градусов согласно одному набору входных данных, а размах качания 20 градусов согласно другому набору входных данных.
Согласно различным вариантам осуществления, транспортное средство 200 производит эффект качания, который имитирует синусоидальную кривую. В положении +1 по оси Y, профиль пучка находится в крайнем левом положении выбранного размаха качания. В положении -1 по оси Y, профиль пучка находится в крайнем правом положении выбранного размаха качания. Ось X представляет собой время. Для создания синусоидального эффекта, транспортное средство 200 циклически проходит между профилями фары согласно синусоидальной кривой. Когда транспортное средство оборудовано конфигурацией (a), каждый профиль фары может быть связан с конкретным диапазоном по оси Y (например, профиль A находится от 0 до 0,1, профиль B находится от 0,1 до 0,2, и т. д.). Таким образом, транспортное средство 200 переключается с профиля A на профиль B в момент времени по оси X, соответствующий положению 0,1 по оси Y. Излагая иначе, транспортное средство 200 сегментирует ось Y синусоидальной кривой и связывает профиль пучка с каждым сегментом.
Фиг. 4 показывает примерную синусоидальную кривую 400. Профиль 1 пучка связан с диапазоном по оси Y от 0 до 0,33. Профиль 2 пучка связан с диапазоном по оси Y от 0,33 до 0,66. Профиль 3 пучка связан с диапазоном по оси Y от 0,66 до 1. Профиль 4 пучка связан с диапазоном по оси Y от 0 до -0,33. Профиль 5 пучка связан с диапазоном по оси Y от -0,33 до -0,66. Профиль 6 пучка связан с диапазоном по оси Y от -0,66 до -1,0. Профиль 1 пучка находится под углом в 3 градуса относительно горизонтали (то есть, прямой дороги). Профиль 2 пучка находится под углом в 6 градусов относительно горизонтали. Профиль 3 пучка находится под углом в 9 градусов; профиль 4 пучка находится под углом в -3 градуса; профиль 5 пучка находится под углом в -6 градусов; профиль 6 пучка находится под углом в -9 градусов.
Когда транспортное средство 200 вводит в действие качание фар, транспортное средство 200 применяет профиль 1 пучка до t1. Транспортное средство 200 применяет профиль 2 пучка от t1 до t2. Транспортное средство применяет профиль 3 пучка от t2 до t4. Транспортное средство применяет профиль 2 пучка от t4 до t5. Транспортное средство применяет профиль 1 от t5 до пи. Транспортное средство применяет профиль 4 пучка от пи до t6, и т д.
Когда транспортное средство оборудовано конфигурацией (b), транспортное средство 200 управляет ускорением и/или скоростью электродвигателя фары для создания синусоидального эффекта. Со ссылкой на фиг. 4, транспортное средство 200 управляет электродвигателем фары, так чтобы фара находилась под углом=1/3 (или 0,33) крайнего правого угла в t1, под углом=2/3 (или 0,66) крайнего правого угла в t2, под крайним правым углом в t3, и т. д. Можно найти соответствующие ускорение и/или скорости, беря производные синусоидальной кривой по фиг. Z.
Следует принимать во внимание, что значения по фиг. 4 являются только примерными и показаны всего лишь для иллюстрации. На практике, частота синусоидальной кривой может настраиваться и, в конфигурации (a), большее или меньшее количество профилей пучка могут быть связаны с кривой (то есть, ось Y может быть сегментирована под более чем 6 разных профилей пучка).
Согласно различным вариантам осуществления, транспортное средство 200 выбирает размах качания и/или частоту синусоидальной кривой на основании одного или более из (a) выявленной скорости транспортного средства 200, (b) выявленного ускорения транспортного средства 200, и (c) размеров транспортного средства 200, (d) расстояния обнаруженного объекта от транспортного средства 200, (e) расстояния выявленного встречного транспортного средства от транспортного средства 200, (f) того, ведется ли транспортное средство 200 вручную или автономно.
Например, когда транспортное средство 200 передвигается на высокой величине скорости, транспортное средство 200 может реализовывать узкий размах качания с высокой частотой синусоиды. Когда транспортное средство 200 передвигается на низкой величине скорости, транспортное средство 200 может реализовывать широкий размах качания с низкой частотой синусоиды. Со ссылкой на пункт (f), когда транспортное средство 200 ведется вручную, размах качания может быть уже, чем когда транспортное средство ведется автономно. Таким образом, что касается пункта (f), транспортное средство 200 сужает угол качания при выявлении ручного вождения и расширяет размах качания при выявлении автономного вождения.
Как описано выше, транспортное средство 200 автоматически выполняет качание при выявлении выхода из строя фары. Согласно различным вариантам осуществления, транспортное средство 200 автоматически выполняет качание только при выявлении (a) встречного движения транспорта (то есть, других встречных транспортных средств) и/или (b) объектов предопределенного размера, находящихся впереди транспортного средства (например, животных). Как известно в данной области техники, транспортное средство 200 может выполнять эти определения с помощью переднего локального датчика 102b.
Согласно различным вариантам осуществления, транспортное средство 200 временно выводит из работы качание при выявлении движения на повороте транспортного средства 200. Точнее, когда скорость транспортного средства находится ниже предопределенной скорости движения на повороте (например, 20 миль в час), а угол поворота управляемых колес превышает определенную величину (например, 10 градусов от центра), транспортное средство 200 может выводить из работы качание и устанавливать профиль фары у работающей фары в один или более предопределенных профилей движения на повороте. Когда маневр движения на повороте закончился (что выявляется на основании скорости и/или угла поворота управляемых колес), транспортное средство 200 повторно вводит в действие качание.
Эффект качания преимущественно разгоняет животных, таких как олени. Таким образом, следует принимать во внимание, что транспортное средство 200 может выполнять эффект качания, даже когда являются работающими обе фары. Транспортное средство 200 может выполнять качание в ответ на: (a) команду пользователя, (b) автоматически в ответ на выявление животных, соответствующих предопределенному профилю, (c) автоматически в ответ на местоположение по GPS. Что касается (c), транспортное средство 200 может запрашивать карту, хранимую на внешнем сервере, об известных местах обитания оленей и автоматически выполнять качание, когда транспортное средство попало в одно из мест обитания оленей. Когда обе фары качаются, фары могут совпадать по фазе или не совпадать по фазе на 180 градусов.
Хотя изобретение было применено к фарам, как обсуждено выше, следует принимать во внимание, что изобретение может применяться к другим источникам света, таким как задние фонари транспортного средства (или любой другой источник света). Транспортные средства типично включают в себя по меньшей мере две разновидности задних фонарей: тормозные фонари, которые вводятся в действие, когда транспортное средство тормозит, и задние фонари, которые вводятся в действие одновременно с фарами (то есть, задние фонари подразумеваются действующими всегда, когда транспортное средство едет ночью).
Задние фонари могут иметь конфигурацию, аналогичную системе 10 ближнего света по Лукаксу. Точнее, задние фонари могут включать в себя основной фонарь и множество вспомогательных фонарей. Задние фонари могут оптически передавать информацию о транспортном средстве 200 задним транспортным средствам. Например, транспортное средство 200 может быть выполнено с возможностью качать задними фонарями (с использованием раскрытых выше способов) на определенной частоте и с определенным размахом качания на основании одного или более из (a) скорости транспортного средства 200, (b) ускорения транспортного средства 200, (c) замедления транспортного средства 200.
Способ продувки выхлопных газов в двигателях внутреннего сгорания (варианты)
Способ работы двигателя (варианты) и система двигателя
Способ для двигателя, способ для топливной системы и система транспортного средства
Усиливающий узел и система подъемной задней двери
Способ (варианты) и система управления транспортным средством
Способ управления двигателем транспортного средства, способ для двигателя транспортного средства и система транспортного средства
Способ работы транспортного средства с гибридным приводом (варианты)
Способ для двигателя с наддувом, способ для двигателя транспортного средства и способ для двигателя
Способ для двигателя (варианты)
Несущий каркас (варианты) в узле блока цилиндров двигателя и способ работы системы смазки в двигателе
Способ (варианты) и система расположения перезаряжаемых датчиков контроля давления в шинах
Соединительный узел (варианты)
Транспортное средство (варианты)
Способ контроля зеркал бокового вида в автономных транспортных средствах, компьютер и транспортное средство
Вычислительное устройство и способ определения работоспособности аккумуляторной батареи транспортного средства
Заряд электротранспортного средства
Способ и компьютер для контроля боковых зеркал заднего вида в автономных транспортных средствах
Система и способ для управления компонентом доступа транспортного средства

