Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ
Вид РИД
Изобретение
Область техники
Варианты осуществления настоящего изобретения относятся к области техники системы управления для транспортного средства с гибридным приводом, в которой первичный движитель включает в себя двигатель и по меньшей мере три электродвигателя.
Уровень техники
В публикации US 2006/011395 A1 описано транспортное средство с гибридным приводом, в котором первичный движитель включает в себя двигатель и три электродвигатель-генератора. Транспортное средство с гибридным приводом, раскрытое в US 2006/011395 A1, содержит устройство распределения мощности, включающие в себя два набора планетарных зубчатых механизмов. Устройство распределения мощности, сконструированное таким образом, выполняет дифференциальное действие между четырьмя вращающимися элементами. В устройстве распределения мощности, первый вращающийся элемент присоединен к двигателю, второй вращающийся элемент присоединен к первому электродвигателю, третий вращающийся элемент присоединен ко второму электродвигателю, и четвертый вращающийся элемент присоединен к ведущим колесам через дифференциальный узел, присоединенный к третьему электродвигателю. Согласно принципам US 2006/011395 A1, соотношение скоростей между первым вращающимся элементом и четвертым вращающимся элементом может непрерывно меняться посредством манипулирования первым электродвигателем и вторым электродвигателем. В транспортном средстве с гибридным приводом, раскрытом в US2006/011395 A1, любой один из электродвигателей, ожидаемая отдаваемая мощность которого является меньшей, чем у другого, используется для создания силы реакции против крутящего момента двигателя, а получающееся в результате электричество подается на третий электродвигатель.
Патент США № 8512189 также описывает транспортное средство с гибридным приводом, содержащее двигатель и три электродвигателя. Согласно принципам патента США № 8512189, режим работы транспортного средства с гибридным приводом может выбираться из режима смешанного распределения, режима распределения на входе, режима пуска в ход и режима привода на все колеса, и двигатель приводится в действие а таких режимах работы. В режиме смешанного распределения, один из первого электродвигателя и второго электродвигателя служит в качестве генератора для вращения первой ведущей оси, а другой электродвигатель служит в качестве первичного движителя. В режиме распределения на входе, один из первого электродвигателя и второго электродвигателя служит в качестве генератора, а третий электродвигатель служит в качестве первичного движителя для приведения в движение второй ведущей оси. В режиме пуска в ход, один из первого электродвигателя и второго электродвигателя служит в качестве генератора, другой электродвигатель функционирует в качестве первичного движителя, чтобы вырабатывать крутящий момент для предотвращения вращения первой ведущей оси крутящим моментом двигателя, а третий электродвигатель приводится в действие в качестве электродвигателя электричеством, вырабатываемым электродвигателем, служащим в качестве генератора, чтобы пускать в ход транспортное средство с гибридным приводом. В режиме привода на все колеса, один из первого электродвигателя и второго электродвигателя служит в качестве генератора, а другой электродвигатель и третий электродвигатель служат по отдельности в качестве первичного движителя для вращения первой ведущей оси и второй ведущей оси, соответственно.
Согласно принципам вышеизложенных документов предшествующего уровня техники, повышение числа оборотов двигателя может быть ограничено верхней предельной частотой вращения электродвигателя и верхней предельной частотой вращения сателлита узла планетарной передачи. Другими словами, максимальный крутящий момент двигателя может быть ограничен такими ограничивающими факторами. Например, в транспортном средстве с гибридным приводом, раскрытом в US 2006/011395 A1, первый электродвигатель присоединен к устройству распределения мощности для управления числом оборотов двигателя, присоединенного к устройству распределения мощности. С этой целью, максимальный крутящий момент электродвигателя устанавливается на значение, возможное для создания силы реакции против двигателя. То есть, если максимальный крутящий момент двигателя мал, максимальный крутящий момент электродвигателя устанавливается в меньшее значение. Следовательно, недостаток движущей силы для приведения в движение транспортного средства может вызываться в диапазоне от низкого до среднего числа оборотов, несмотря на ввод в действие двигателя.
Таким образом, US 2006/011395 A1 раскрывает технологии уменьшения габаритов электродвигателя и избегания возникновения циркуляции мощности. С другой стороны, патент США № 8512189 раскрывает технологии выбора режима работы таким образом, чтобы улучшать эффективность использования топлива. Однако, традиционные транспортные средства с гибридным приводом должны быть улучшены, чтобы устранить недостаток движущей силы в диапазоне от низкого до среднего числа оборотов во время приведения в движение наряду с вводом в действие двигателя.
Сущность изобретения
Аспекты вариантов осуществления настоящего изобретения были задуманы, обращая внимание на вышеизложенные технические проблемы, а потому, цель настоящего изобретения состоит в том, чтобы предоставить систему управления, которая применяется к транспортному средству с гибридным приводом, включающему в себя двигатель и по меньшей мере три электродвигателя, для улучшения рабочих характеристик транспортного средства, тем самым, устраняя недостаток движущей силы в диапазоне от низкого до среднего числа оборотов.
Система управления согласно вариантам осуществления настоящего изобретения относится к системе управления для транспортного средства с гибридным приводом, содержащей: первичный движитель, включающий в себя двигатель и по меньшей мере три электродвигателя; дифференциальный механизм, который выполняет дифференциальное вращение среди по меньшей мере четырех вращающихся элементов; выходной узел, который выдает мощность на ведущие колеса; и контроллер, который управляет первичным движителем. В транспортном средстве с гибридным приводом, двигатель присоединен к первому вращающемуся элементу дифференциального механизма, первый электродвигатель первичного движителя присоединен ко второму вращающемуся элементу дифференциального механизма, второй электродвигатель первичного движителя присоединен к третьему вращающемуся элементу дифференциального механизма, выходной узел присоединен к четвертому вращающемуся элементу дифференциального механизма, и третий электродвигатель первичного движителя присоединяется к выходному узлу, который присоединен к четвертому вращающемуся элементу, или другому выходному узлу, который не присоединен к четвертому вращающемуся элементу. Для того чтобы достигнуть поясненной выше цели, согласно варианту осуществления, контроллер выполнен с возможностью: определять рабочее состояние транспортного средства с гибридным приводом; и управлять первым электродвигателем и вторым электродвигателем таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, чтобы приводить в движение транспортное средство с гибридным приводом в прямом направлении, и управлять третьим электродвигателем таким образом, чтобы вырабатывал крутящий момент в прямом направлении, чтобы приводить в движение транспортное средство совместно с крутящим моментом двигателя, когда контроллер определяет, что гибридное транспортное средство приводится в движение крутящим моментом двигателя.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: сравнивать требуемую движущую силу для приведения в движение транспортного средства с гибридным приводом с пороговым значением; и управлять первым электродвигателем и вторым электродвигателем таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, чтобы приводить в движение транспортное средство в прямом направлении, и управлять третьим электродвигателем таким образом, чтобы вырабатывал крутящий момент в прямом направлении, чтобы приводить в движение транспортное средство совместно с крутящим моментом двигателя, когда требуемая движущая сила является большей, чем пороговое значение.
В неограничивающем варианте осуществления, при вырабатывании крутящих моментов первым электродвигателем и вторым электродвигателем в том же самом направлении, что и крутящий момент двигателя, чтобы приводить в движение транспортное средство с гибридным приводом в прямом направлении, контроллер может управлять первым электродвигателем таким образом, чтобы вырабатывал крутящий момент в том же самом направлении, что и крутящий момент двигателя, для вращения второго вращающегося элемента, и управлять вторым электродвигателем таким образом, чтобы вырабатывал крутящий момент в том же самом направлении, что и крутящий момент двигателя, для вращения третьего вращающегося элемента. Взамен, контроллер может управлять первым электродвигателем таким образом, чтобы вырабатывал крутящий момент для вращения второго вращающегося элемента в том же самом направлении, что и крутящий момент двигателя, и управлять вторым электродвигателем таким образом, чтобы вырабатывал крутящий момент в направлении, противоположном крутящему моменту двигателя, для торможения третьего вращающегося элемента. Кроме того, контроллер может управлять вторым электродвигателем таким образом, чтобы вырабатывал крутящий момент в том же самом направлении, что и крутящий момент двигателя, для вращения третьего вращающегося элемента, и управлять первым электродвигателем таким образом, чтобы вырабатывал крутящий момент в направлении, противоположном крутящему моменту двигателя, для торможения второго вращающегося элемента,
В неограничивающем варианте осуществления, контроллер дополнительно может быть выполнен с возможностью управлять первым электродвигателем, вторым электродвигателем и третьим электродвигателем таким образом, чтобы служили в качестве электродвигателя по отдельности.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: сравнивать верхнее предельное значение крутящего момента, возможного для формирования двигателем, с расчетным максимальным крутящим моментом двигателя; и управлять одним из первого электродвигателя и второго электродвигателя таким образом, чтобы повышать крутящий момент на выходном валу другого одного из первого электродвигателя и второго электродвигателя, когда верхнее предельное значение крутящего момента, вырабатываемого двигателем, является меньшим, чем расчетный максимальный крутящий момент двигателя.
В неограничивающем варианте осуществления, контроллер дополнительно может быть выполнен с возможностью управлять первым электродвигателем, вторым электродвигателем и третьим электродвигателем таким образом, чтобы доводить до максимума результирующую силу: движущей силы, сформированной крутящим моментом, подаваемым с четвертого вращающегося элемента на выходной узел; и движущей силы, сформированной крутящим моментом, подаваемым с третьего электродвигателя на выходной узел.
В неограничивающем варианте осуществления, дифференциальный механизм может включать в себя: первый узел планетарной передачи, включающий в себя первую солнечную шестерню, первое водило и первую коронную шестерню; и второй узел планетарной передачи, включающий в себя вторую солнечную шестерню, второе водило и вторую коронную шестерню. В дифференциальном механизме, первая солнечная шестерня и вторая солнечная шестерня присоединены друг к другу, первая коронная шестерня и второе водило присоединены друг к другу, первое водило присоединено к двигателю, чтобы служить в качестве первого вращающегося элемента, первая солнечная шестерня или вторая солнечная шестерня присоединена к первому электродвигателю, чтобы служить в качестве второго вращающегося элемента, вторая коронная шестерня присоединена ко второму электродвигателю, чтобы служить в качестве третьего вращающегося элемента, и первая коронная шестерня или второе водило присоединены к выходному узлу, чтобы служить в качестве четвертого вращающегося элемента.
В неограничивающем варианте осуществления, дифференциальный механизм может включать в себя: первый узел планетарной передачи, включающий в себя первую солнечную шестерню, первое водило и первую коронную шестерню; и второй узел планетарной передачи, включающий в себя вторую солнечную шестерню, второе водило и вторую коронную шестерню. В дифференциальном механизме, первое водило и вторая коронная шестерня присоединены друг к другу, первая коронная шестерня и второе водило присоединены друг к другу, первая коронная шестерня или второе водило присоединены к двигателю, чтобы служить в качестве первого вращающегося элемента, вторая солнечная шестерня присоединена к первому электродвигателю, чтобы служить в качестве второго вращающегося элемента, первая солнечная шестерня присоединена ко второму электродвигателю, чтобы служить в качестве третьего вращающегося элемента, и первое водило или вторая коронная шестерня присоединены к выходному узлу, чтобы служить в качестве четвертого вращающегося элемента.
Таким образом, согласно варианту осуществления настоящего изобретения, все из первого электродвигателя, второго электродвигателя и третьего электродвигателя вырабатывают крутящие моменты в том же самом направлении, что и крутящий момент двигателя, при приведении в движение транспортного средства от двигателя. Более точно, первый электродвигатель и второй электродвигатель управляются таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, чтобы прикладывались к первому вращающему элементу для приведения в движение транспортного средства с гибридным приводом в прямом направлении, а третий электродвигатель управляется таким образом, чтобы вырабатывать крутящий момент в прямом направлении для приведения в движение транспортного средства совместно с крутящим моментом двигателя. Согласно варианту осуществления настоящего изобретения, поэтому, движущей силе для приведения в движение транспортного средства может оказываться содействие первым электродвигателем, вторым электродвигателем и третьим электродвигателем, даже когда двигателю не предоставлена возможность вырабатывать максимальный крутящий момент. По этой причине, движущая сила может обеспечиваться при пуске в ход или разгоне транспортного средства либо во время приведения в движение вперед в диапазоне от низкого до среднего числа оборотов. То есть, рабочие характеристики транспортного средства могут быть улучшены.
В дополнение, первый электродвигатель, второй электродвигатель и третий электродвигатель приводятся в действие в качестве электродвигателей, чтобы вырабатывать крутящие моменты в том же самом направлении, что и крутящий момент двигателя, управляя частотами вращения этих электродвигателей. Согласно варианту осуществления настоящего изобретения, поэтому, мощность аккумуляторной батареи может эффективно использоваться без вырабатывания электричества первым электродвигателем и вторым электродвигателем при оказании содействия движущей силе крутящими моментами электродвигателей. По этой причине, может улучшаться эффективность использования энергии транспортного средства с гибридным приводом.
Краткое описание чертежей
Признаки, аспекты и преимущества примерных вариантов осуществления настоящего изобретения будут лучше понятны при обращении к нижеследующему описанию и сопроводительным чертежам, которые не должны ограничивать изобретение никоим образом. На чертежах:
Фиг. 1 - схематическая иллюстрация, показывающая пример системы привода транспортного средства с гибридным приводом, к которой применима система управления согласно варианту осуществления;
фиг. 2 - схематическая иллюстрация, показывающая первый пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 3 - блок-схема последовательности операций способа, показывающая первый пример процедуры, выполняемой системой управления;
фиг. 4 - номографическая схема, показывающая ситуацию, в которой все из электродвигателей служат в качестве электродвигателя во время выполнения процедуры, показанной на фиг. 3;
Фиг. 5a и 5b - номографические схемы, показывающие ситуацию, в которой первый электродвигатель служит в качестве генератора, а второй электродвигатель и третий электродвигатель служат в качестве электродвигателя во время выполнения процедуры, показанной на фиг. 3;
фиг. 6 - блок-схема последовательности операций способа, показывающая второй пример процедуры, выполняемой системой управления;
фиг. 7 - блок-схема последовательности операций способа, показывающая третий пример процедуры, выполняемой системой управления;
фиг. 8 - график, показывающий область, где число оборотов двигателя и скорость транспортного средства меняются во время выполнения процедуры, показанной на фиг. 7;
фиг. 9 - блок-схема последовательности операций способа, показывающая четвертый пример процедуры, выполняемой системой управления;
фиг. 10 - блок-схема последовательности операций способа, показывающая пятый пример процедуры, выполняемой системой управления;
фиг. 11 - блок-схема последовательности операций способа, показывающая шестой пример процедуры, выполняемой системой управления;
фиг. 12 - график, показывающий область, где меняются число оборотов двигателя и скорость транспортного средства, и рабочую точку двигателя во время выполнения процедуры, показанной на фиг. 11;
фиг. 13 - график, показывающий пиковое значение крутящего момента двигателя и мощности двигателя во время выполнения процедуры, показанной на фиг. 11;
фиг. 14 - номографическая схема, показывающая ситуацию, в которой все из электродвигателей управляются для повышения крутящего момента двигателя до максимального крутящего момента во время выполнения процедуры, показанной на фиг. 11;
фиг. 15 - номографическая схема, показывающая ситуацию, в которой все из электродвигателей управляются для повышения мощности двигателя до максимальной мощности во время выполнения процедуры, показанной на фиг. 11;
фиг. 16 - схематическая иллюстрация, показывающая второй пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 17 - схематическая иллюстрация, показывающая третий пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 18 - схематическая иллюстрация, показывающая четвертый пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 19 - схематическая иллюстрация, показывающая пятый пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 20 - схематическая иллюстрация, показывающая шестой пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 21 - схематическая иллюстрация, показывающая седьмой пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 22 - схематическая иллюстрация, показывающая восьмой пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 23 - схематическая иллюстрация, показывающая девятый пример кинематической цепи транспортного средства с гибридным приводом;
фиг. 24 - схематическая иллюстрация, показывающая десятый пример кинематической цепи транспортного средства с гибридным приводом; и
фиг. 25 - схематическая иллюстрация, показывающая одиннадцатый пример кинематической цепи транспортного средства с гибридным приводом.
Подробное описание предпочтительных вариантов осуществления изобретения
Предпочтительные варианты осуществления настоящего изобретения далее будут пояснены со ссылкой на прилагаемые чертежи.
Далее, со ссылкой на фиг. 1, схематически показан пример конструкции транспортного средства Ve с гибридным приводом (которое будет называться просто «транспортным средством» в дальнейшем), к которому применима система управления согласно варианту осуществления. Транспортное средство Ve содержит дифференциальный механизм, приспособленный для выполнения дифференциального действия между четырьмя вращающимися элементами и выходным узлом, чтобы подавать мощность на любую из пары передних колес и пары задних колес.
Как показано на фиг. 1, первичный движитель транспортного средства Ve включает в себя двигатель 1 (указываемый ссылкой как «ENG» на фиг. 1), первый электродвигатель 2 (указываемый ссылкой как «MG1» на фиг. 1), второй электродвигатель 3 (указываемый ссылкой как «MG2» на фиг. 1) и третий электродвигатель 4 (указываемый ссылкой как «MG3» на фиг. 1). Транспортное средство Ve дополнительно содержит дифференциальный механизм 5, служащий в качестве устройства распределения мощности, и выходной узел 7, который выдает мощность на ведущие колеса 6.
Например, двигатель внутреннего сгорания, такой как бензиновый двигатель и дизельный двигатель, может использоваться в качестве двигателя 1. Отдаваемая мощность двигателя 1 может настраиваться электрически, и двигатель 1 может электрически запускаться и останавливаться по необходимости. Например, при условии, что бензиновый двигатель используется в качестве двигателя 1, степень открывания дроссельного клапана, величина подачи топлива, начало и завершение зажигания, установка опережения зажигания, и т.д., могут управляться электрически.
Синхронный двигатель типа с постоянными магнитами или асинхронный двигатель, имеющий генерирующую функцию, то есть, электродвигатель-генератор может использоваться по отдельности в качестве первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4. Первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 по отдельности присоединены к контроллеру источника питания (не показан), включающему в себя аккумуляторную батарею и инвертер, так чтобы их частоты вращения и крутящие моменты управлялись электрически. В дополнение, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 также могут приводиться в действие избирательно в качестве электродвигателя и генератора. В транспортном средстве Ve, показанном на фиг. 1, поэтому, электрическая мощность, вырабатываемая первым электродвигателем 2 или вторым электродвигателем 3, может подаваться на третий электродвигатель 4, чтобы приводить в действие третий электродвигатель 4 в качестве электродвигателя.
Дифференциальный механизм 5 приспособлен для выполнения дифференциального действия между первым вращающимся элементов 5a, вторым вращающимся элементом 5b, третьим вращающимся элементом 5c и четвертым вращающимся элементом 5d. Более точно, первый вращающийся элемент 5a присоединен к двигателю 1, второй вращающийся элемент 5b присоединен к первому электродвигателю, третий вращающийся элемент 5c присоединен ко второму электродвигателю 3, а четвертый вращающийся элемент 5d присоединен к выходному узлу 7.
Дифференциальный механизм 5 включает в себя первый узел 8 планетарной передачи (указываемый ссылкой как «PL1» на фиг. 1) и второй узел 9 планетарной передачи (указываемый ссылкой как «PL2» на фиг. 1). Первый узел 8 планетарной передачи включает в себя первый входной элемент 8a, первый элемент 8b реакции и первый выходной элемент 8c. Подобным образом, второй узел 9 планетарной передачи включает в себя второй входной элемент 9a, второй элемент 9b реакции и второй выходной элемент 9c. Первый элемент 8b реакции и второй элемент 9b реакции присоединены друг к другу, и первый выходной элемент 8c и второй выходной элемент 9c присоединены друг к другу.
В дифференциальном механизме 5, выходной вал 1a двигателя 1 присоединен к первому входному элементу 8a, выходной вал 2a первого электродвигателя 2 присоединен к первому элементу 8b реакции и второму элементу 9b реакции, а выходной вал 3a второго электродвигателя 3 присоединен ко второму входному элементу 9a. Выходной узел 7 присоединен к первому выходному элементу 8c и второму выходному элементу 9c, а также присоединен к ведущим колесам 6, чтобы выдавать мощность на ведущие колеса 6.
То есть, в дифференциальном механизме 5, первый входной элемент 8a, присоединенный к двигателю 1, служит в качестве первого вращающегося элемента 5a, первый элемент 8b реакции и второй элемент 9b реакции, присоединенные к первому электродвигателю 2, служат в качестве второго вращающегося элемента 5b, второй входной элемент 9a, присоединенный ко второму электродвигателю 3, служит в качестве третьего вращающегося элемента 5c, а первый выходной элемент 8c и второй выходной элемент 9c, присоединенные к выходному узлу 7, служат в качестве четвертого вращающегося элемента 5d.
Таким образом, транспортное средство Ve согласно варианту осуществления настоящего изобретения оснащено «выходным узлом» для подачи мощности на ведущие колеса 6. Более точно, при условии, что какая-нибудь одна из пар передних колес и задних колес служит в качестве ведущих колес, выходной узел выполнен с возможностью подавать мощность на упомянутую одну из пар передник колес и задних колес, служащих в качестве ведущих колес. В противоположность, при условии, что обе пары из передних колес и задних колес служат в качестве ведущих колес, два выходных узла выполнены с возможностью подавать мощность на каждую из пар передних колес и задних колес. В примере, показанном на фиг. 1, выходной узел 7 вставлен между четвертым вращающимся элементом 5d дифференциального механизма 5 и передними колесами, служащими в качестве ведущих колес 6.
Третий электродвигатель 4 также присоединен к выходному узлу 7. В транспортном средстве, показанном на фиг. 1, поэтому, ведущие колеса 6 могут вращаться не только крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7, но также и крутящим моментом, подаваемым с третьего электродвигателя на выходной узел 7.
Вращение выходного вала 1a двигателя 1, присоединенного к первому входному элементу 8a, может избирательно останавливаться тормозом 10. В транспортном средстве Ve, первый входной элемент 8a наделен возможностью служить в качестве элемента реакции первого узла 8 планетарной передачи, чтобы подавать крутящий момент на выходном валу первого электродвигателя 2 на выходной узел 7, применяя тормоз 10. В этом случае, транспортное средство Ve может приводиться в движение, во время остановки двигателя 1, крутящим моментом одного из первого электродвигателя 2 и второго электродвигателя 3, а также крутящим моментом третьего электродвигателя 4, или крутящими моментами первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4.
Для того чтобы управлять двигателем 1, первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4, транспортное средство Ve дополнительно оснащено контроллером 11 (указываемым ссылкой как «ECU» на фиг. 1), состоящим главным образом из микрокомпьютера.
Например, контроллер 11 принимает сигналы обнаружения с датчика 12 скорости транспортного средства, который выявляет скорость транспортного средства Ve, датчика 13 акселератора, который выявляет положение или скорость нажатия педали акселератора, датчика 14 числа оборотов двигателя, который выявляет число оборотов двигателя 1, датчика 15 частоты вращения первого электродвигателя (или кругового датчика положения), который выявляет частоту вращения первого электродвигателя 2, датчика 16 частоты вращения второго электродвигателя (или кругового датчика положения), который выявляет частоту вращения второго электродвигателя 3, датчика 17 частоты вращения третьего электродвигателя (или кругового датчика положения), который выявляет частоту вращения третьего электродвигателя 4, датчика 18 аккумуляторной батареи, который выявляет уровень состояния заряда (будет в дальнейшем сокращенно обозначаться как «SOC») аккумуляторной батареи, и датчика 19 положения переключения передач, который выявляет положение рычага переключения передач или селектора переключения передач. Контроллер 11 выполнен с возможностью выполнять расчет на основании ситуационных данных, а также данных и форму, установленных заблаговременно, и передавать результаты расчета в форме командных сигналов в компоненты транспортного средства Ve.
С обращением к фиг. 2, показан первый пример кинематической цепи транспортного средства Ve. Кинематическая цепь, показанная на фиг. 2, приспособлена для использования в качестве коробки передач в блоке с трансмиссией в транспортных средствах компоновки FF (с передним расположением двигателя/приводом на передние колеса), транспортных средствах компоновки RR (с задним расположением двигателя/приводом на задние колеса) и транспортных средствах компоновки MR (со средним расположением двигателя/задним приводом).
В кинематической цепи, показанной на фиг. 2, первый узел 8 планетарной передачи и второй узел 9 планетарной передачи размещены соосно с выходным валом 1a двигателя 1, а вращающиеся элементы первого узла 8 планетарной передачи и вращающиеся элементы второго узла 9 планетарной передачи присоединены друг к другу для формирования дифференциального механизма 5 в качестве узла составной планетарной передачи. Первый узел 8 планетарной передачи является узлом планетарной передачи с одним сателлитом, включающим в себя первую солнечную шестерню S1, первую коронную шестерню R1 и первое водило C1. В первом узле 8 планетарной передачи, более точно, первая солнечная шестерня S1 в виде зубчатого колеса внешнего зацепления скомпонована соосно с выходным валом 1a двигателя 1, первая коронная шестерня R1 в виде зубчатого колеса внутреннего зацепления скомпонована соосно вокруг первой солнечной шестерни S1, а первое водило C1 поддерживает множество первых сателлитов P1, вставленных между первой солнечной шестерней S1 и первой коронной шестерней R1 допускающим вращение образом.
Второй узел 9 планетарной передачи также является узлом планетарной передачи с одним сателлитом, включающим в себя вторую солнечную шестерню S2, вторую коронную шестерню R2 и второе водило C2. Во втором узле 9 планетарной передачи, более точно, вторая солнечная шестерня S2 в виде зубчатого колеса внешнего зацепления скомпонована соосно с выходным валом 1a двигателя 1, вторая коронная шестерня R2 в виде зубчатого колеса внутреннего зацепления скомпонована соосно вокруг второй солнечной шестерни S2, а второе водило C2 поддерживает множество вторых сателлитов P2, вставленных между второй солнечной шестерней S2 и второй коронной шестерней R2 допускающим вращение образом.
В дифференциальном механизме 5, первое водило C1 присоединено к выходному валу 1a двигателя 1, солнечная шестерня S1 и вторая солнечная шестерня S2 присоединены к выходному валу 2a первого электродвигателя 2, вторая коронная шестерня R2 присоединена к выходному валу 3a второго электродвигателя 3, и первая коронная шестерня R1 и второе водило C2 присоединены к выходному узлу 7. Согласно первому примеру, показанному на фиг. 2, выходной узел 7 включает в себя ведущую шестерню 21, вал 22 контрпривода, ведомую шестерню 23 контрпривода, ведущую шестерню 24 колесной передачи и узел 25 дифференциальной передачи, и крутящий момент на выходном валу выходного узла 7 подается на ведущие колеса 6 через каждый приводной вал 27.
В первом узле 8 планетарной передачи, соответственно, первое водило C1 служит в качестве первого входного элемента 8a, первая солнечная шестерня S1 служит в качестве первого элемента 8b реакции, а первая коронная шестерня R1 служит в качестве первого выходного элемента 8c. С другой стороны, во втором узле 9 планетарной передачи, вторая коронная шестерня R2 служит в качестве второго входного элемента 9a, вторая солнечная шестерня S2 служит в качестве второго элемента 9b реакции, а второе водило C2 служит в качестве второго выходного элемента 9c. Соответственно, в дифференциальном механизме 5, первое водило C1 служит в качестве первого вращающегося элемента 5a, первая солнечная шестерня S1 и вторая солнечная шестерня S2 служат в качестве второго вращающегося элемента 5b, вторая коронная шестерня R2 служит в качестве третьего вращающегося элемента 5c, а первая коронная шестерня R1 и второе водило C2 служат в качестве четвертого вращающегося элемента 5d.
По выбору, редуктор может быть вставлен между первым водилом C1 первого узла 8 планетарной передачи и выходным валом 1a двигателя 1. Взамен, демпферное устройство или гидротрансформатор (ни один из которых не показан) также могут быть вставлены между первым водилом C1 первого узла 8 планетарной передачи и выходным валом 1a двигателя 1.
Ведущая шестерня 21 сформирована вокруг второго водила C2, чтобы вращаться как целая часть с ним, и вал 22 контрпривода скомпонован параллельно с выходным валом 1a двигателя 1. Ведомая шестерня 23 контрпривода посажена на одну из концевых частей вала 22 контрпривода (то есть, с правой стороны на фиг. 2), тем временем, будучи зацепленной с ведущей шестерней 21, а ведущая шестерня 24 колесной передачи посажена на другую концевую часть вала 22 контрпривода (то есть, с левой стороны на фиг. 2), тем временем, будучи зацепленной с ведомой шестерней 26 колесной передачи (то есть, коронной шестерней дифференциала) узла 25 дифференциальной передачи в качестве последней понижающей ступени. Узел 25 дифференциальной передачи присоединен к каждому из ведущих колес 6 через каждый из приводных валов 27.
Таким образом, ведущая шестерня 21, вал 22 контрпривода, ведомая шестерня 23 контрпривода, ведущая шестерня 24 колесной передачи и узел 25 дифференциальной передачи формируют выходной узел 7, и крутящий момент, подаваемый на выходной узел 7 со второго водила C2, дополнительно подается на ведущие колеса через приводные валы 27.
Крутящий момент третьего электродвигателя 4 может добавляться к крутящему моменту, передаваемому из дифференциального механизма 5 на ведущие колеса 6. С этой целью, выходной вал 4a третьего электродвигателя 4 скомпонован параллельно валу 22 контрпривода, а сателлит 28 насажен на передний конец (то есть на левую сторону на фиг. 2) выходного вала 4a, тем временем, будучи зацепленным с ведомой шестерней 23 контрпривода. Таким образом, не только второе водило C2, но также и третий электродвигатель 4 присоединены к ведущим колесам 6 через выходной узел 7.
Вращение первого водила C1, присоединенного к выходному валу 1a двигателя 1, избирательно останавливается тормозом 10. Более точно, тормоз 10 обязан прикладывать силу реакции к первому водилу C1, когда первый электродвигатель 2 приводится в действие в качестве электродвигателя во время остановки двигателя 1 для формирования движущей силы. В этой ситуации, сила реакции, получающаяся в результате вращения первого электродвигателя 2 в противоположном направлении (противоположном направлению вращения двигателя 1) посредством подачи электричества на него, принимается предопределенным неподвижным элементом, таким как картер, к которому прикреплен тормоз 10. Следовательно, транспортное средство Ve снабжается силовым приводом от первого электродвигателя 2 во время остановки двигателя 1. Взамен, транспортное средство Ve также может снабжаться силовым приводом от первого электродвигателя и второго электродвигателя 3 или от первого электродвигателя, второго электродвигателя 3 и третьего электродвигателя 4.
Например, фрикционная муфта, такая как многодисковая муфта влажного типа, и кулачковая муфта могут использоваться в качестве тормоза 10. В дополнение, односторонняя муфта также может использоваться в качестве тормоза 10 для остановки контрвращения первого водила C1.
Таким образом, в транспортном средстве Ve, число оборотов двигателя 1 может меняться посредством управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 из ECU 11 без манипулирования муфтой и тормозом. В дополнение, режим работы транспортного средства Ve также может переключаться между множеством режимов без манипулирования муфтой и тормозом.
В транспортном средстве Ve, показанном на фиг. 2, режим электродвигателей, в котором двигатель 1 остановлен, может выбираться из первого режима электродвигателей, в котором транспортное средство Ve снабжается силовым приводом от третьего электродвигателя 4, второго режима электродвигателей, в котором транспортное средство Ve снабжается силовым приводом первым электродвигателем 2 и третьим электродвигателем 4, третьего режима электродвигателей, в котором транспортное средство Ve снабжается силовым приводом от второго электродвигателя 3 и третьего электродвигателя 4, и четвертого режима электродвигателей, в котором транспортное средство Ve снабжается силовым приводом от первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4.
С другой стороны, в гибридном режиме, транспортное средство Ve снабжено силовым приводом по меньшей мере от двигателя 1. Например, в транспортном средстве с гибридным приводом, транспортное средство Ve может приводиться в движение в режиме повышающей передачи, в котором частота вращения четвертого вращающегося элемента 5d, присоединенного к выходному узлу 7, увеличивается сильнее, чем частота вращения первого вращающегося элемента 5a, присоединенного к двигателю 1, крутящими моментами двигателя 1, первого электродвигателя 2 и третьего электродвигателя 4. В гибридном режиме, транспортное средство Ve также может приводиться в движение в режиме понижающей передачи, в котором скорость четвертого вращающегося элемента 5d уменьшается сильнее, чем скорость первого вращающегося элемента 5a, крутящими моментами двигателя 1, второго электродвигателя 3 и третьего электродвигателя 4. В дополнение, в гибридном режиме, число оборотов двигателя 1 может произвольно меняться крутящими моментами двигателя 1, первого электродвигателя 2 и второго электродвигателя 3.
Таким образом, в гибридном режиме, транспортное средство Ve может снабжаться силовым приводом от всех первичных движителей, таких как двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Как описано, в традиционных транспортных средствах с гибридным приводом, имеющих двигатель и три электродвигателя, движущая сила может ограничиваться верхними предельными частотами вращения электродвигателей и вращающихся элементов во время приведения в движение наряду с вводом в действие двигателя. Для того чтобы преодолеть недостаток движущей силы в гибридном режиме, контроллер 11 выполнен с возможностью приводить в движение транспортное средство Ve крутящими моментами всех первичных движителей, таких как двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Более точно, контроллер 11 выполнен с возможностью приводить в движение транспортное средство Ve, приводя в действие первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя 1. Точнее, первый электродвигатель 2 и второй электродвигатель 3 приводятся в действие таким образом, чтобы прикладывали крутящие моменты к первому вращающемуся элементу 5a в том же самом направлении, что и крутящий момент двигателя 1, для приведения в движение транспортного средства Ve в прямом направлении, а третий электродвигатель 4 приводится в действие таким образом, чтобы вырабатывал крутящий момент для приведения в движение транспортного средства Ve в прямом направлении совместно с крутящим моментом двигателя 1.
Пример такого управления для преодоления недостатка движущей силы в гибридном режиме показан на фиг. 3.
Первый пример управления
На этапе S10, определяется, приводится ли в движение или пускается в ход транспортное средство Ve на данный момент наряду с вводом в действие двигателя 1. Более точно, контроллер 11 определяет, что транспортное средство Ve в настоящее время приводится в движение или пускается в ход, тем временем, вводя в действие двигатель 1, в случае, если транспортное средство Ve приводится в движение или пускается в ход в гибридном режиме посредством крутящего момента на валу привода, вырабатываемого двигателем 1, в прямом направлении.
Если транспортное средство Ve приводится в движение без ввода в действие двигателя 1, или транспортное средство Ve останавливается, так что ответом по этапу S10 является Нет, процедура возвращается в точку вызова, не выполняя последующие управляющие воздействия. В противоположность, если транспортное средство Ve на данный момент приводится в движение или пускается в ход двигателем 1, так что ответом по этапу S10 является Да, процедура продвигается на этап S11.
Более точно, на этапе S11, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 управляются таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя. Более точно, первый электродвигатель 2 и второй электродвигатель 3 приводятся в действие таким образом, чтобы прикладывать крутящие моменты к первому вращающемуся элементу 5a в том же самом направлении, что и крутящий момент двигателя 1 для приведения в движение транспортного средства Ve в прямом направлении. Одновременно, третий электродвигатель 4 приводится в действие таким образом, чтобы вырабатывать крутящий момент для приведения в движение транспортного средства Ve в прямом направлении совместно с крутящим моментом, вырабатываемым двигателем 1.
Состояния первичных движителей в этой ситуации показаны на фиг. 4, 5a и 5b. Как показано на фиг. 4, 5a и 5b, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 вырабатывают крутящие моменты в этой ситуации, а направления крутящих моментов, вырабатываемых электродвигателями 2, 3 и 4 являются такими же, как направление крутящего момента, вырабатываемого двигателем 1.
Например, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 могут управляться, как указано на фиг. 4. В ситуации, показанной на фиг. 4, стрелка T1, представляющая собой крутящий момент первого электродвигателя 2, стрелка T2, представляющая собой крутящий момент второго электродвигателя 3, стрелка T3, представляющая собой крутящий момент третьего электродвигателя 4, и стрелка T4, представляющая собой крутящий момент двигателя 1, направлены в прямом направлении, как и направление вращения двигателя 1. То есть, все из первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 вращаются в прямом направлении, чтобы служить в качестве электродвигателя, тем самым, вырабатывая направленные по ходу движения крутящие моменты.
Взамен, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 также могут управляться, как указано на фиг. 5a. В ситуации, показанной на фиг. 5a, стрелка T1, представляющая собой крутящий момент первого электродвигателя 2, стрелка T2, представляющая собой крутящий момент второго электродвигателя 3, и стрелка T3, представляющая собой крутящий момент третьего электродвигателя 4 также направлены вверх, как и стрелка T4, представляющая собой крутящий момент двигателя 1. В этом случае, второй электродвигатель 3 и третий электродвигатель 4 вращаются в прямом направлении, чтобы вырабатывать направленные по ходу движения крутящие моменты. С другой стороны, первый электродвигатель 2 вращается в обратном направлении, тем временем, вырабатывая направленный по ходу движения крутящий момент. Таким образом, второй электродвигатель 3 и третий электродвигатель 4 приводятся в действие в качестве электродвигателей, а первый электродвигатель 2 приводится в действие в качестве генератора.
Взамен, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 также могут управляться, как указано на фиг. 5b. В ситуации, показанной на фиг. 5b, стрелка T1', представляющая собой крутящий момент первого электродвигателя 2, стрелка T2', представляющая собой крутящий момент второго электродвигателя 3, и стрелка T3', представляющая собой крутящий момент третьего электродвигателя 4 также направлены вверх, как и стрелка T4', представляющая собой крутящий момент двигателя 1. В этом случае, первый электродвигатель 2 и третий электродвигатель 4 вращаются в прямом направлении, чтобы вырабатывать направленные по ходу движения крутящие моменты. С другой стороны, второй электродвигатель 3 вращается в обратном направлении, тем временем, вырабатывая направленный по ходу движения крутящий момент. Таким образом, первый электродвигатель 2 и третий электродвигатель 4 приводятся в действие в качестве электродвигателей, а второй электродвигатель 3 приводится в действие в качестве генератора. На фиг. 4, 5a и 5b, стрелки T5 и T5' представляют собой силы реакции, приложенные к транспортному средству Ve от поверхности дороги.
После управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, процедура возвращается в точку вызова.
Второй пример управления
Таким образом, согласно первому примеру управления, показанному на фиг. 3, движущей силе для приведения в движение транспортного средства Ve оказывается содействие крутящими моментами первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4, чтобы устранять недостаток движущей силы в гибридном режиме. Однако, при условии, что требуемая движущая сила является меньшей во время приведения в движение, было бы необязательно оказывать содействие движущей силе всеми из электродвигателей. В этом случае, контроллер 11 дополнительно выполнен с возможностью оказывать содействие движущей силе всеми из электродвигателей, только когда требуется большая движущая сила. Пример такого управления показан на фиг. 6 и, на фиг. 6, общие номера этапов назначены этапам, подобным таковым из первого примера, показанного на фиг. 3.
Если транспортное средство Ve на данный момент приводится в движение или пускается в ход двигателем 1, так что ответом по этапу S10 является Да, процедура продвигается на этап S20, чтобы определять, является или нет требуемая движущая сила большей, чем пороговое значение α. Например, требуемая движущая сила может оцениваться на основании нажатия акселератора и текущей скорости транспортного средства. Более точно, пороговое значение α является верхним предельным значением движущей силы, возможной для формирования только двигателем 1 без оказания содействия электродвигателями 2, 3 и 4, которое определяется на основании результата экспериментирования или имитационного моделирования.
Если требуемая движущая сила является меньшей, чем пороговое значение α, так что ответом на этапе S20 является Нет, процедура возвращается в точку вызова, не выполняя последующие управляющие воздействия. В противоположность, если требуемая движущая сила является большей, чем пороговое значение α, так что ответом по этапу S20 является Да, процедура продвигается на этап S11, чтобы оказывать содействие движущей силе крутящими моментами всех из первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4. Более точно, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 управляются таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, а после этого, процедура возвращается в точку вызова.
Таким образом, согласно второму примеру управления, контроллер 11 управляет первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, во время приведения в движение в гибридном режиме или при пуске в ход транспортного средства Ve в гибридном режиме. Более точно, первый электродвигатель 2 и второй электродвигатель 3 приводятся в действие таким образом, чтобы прикладывали крутящие моменты к первому вращающемуся элементу 5a в том же самом направлении, что и крутящий момент двигателя 1, для приведения в движение транспортного средства Ve в прямом направлении, а третий электродвигатель 4 приводится в действие таким образом, чтобы вырабатывал крутящий момент для приведения в движение транспортного средства Ve в прямом направлении совместно с крутящим моментом двигателя 1. Следовательно, частота вращения второго вращающегося элемента 5b изменяется крутящим моментом, вырабатываемым первым электродвигателем 2 в том же самом направлении, что и у первого вращающегося элемента 5a и пятого вращающегося элемента 5d, усиленные крутящим моментом двигателя. Подобным образом, частота вращения третьего вращающегося элемента 5c изменяется крутящим моментом, вырабатываемым вторым электродвигателем 3 в том же самом направлении, что и у первого вращающегося элемента 5a и пятого вращающегося элемента 5d, усиленные крутящим моментом двигателя. В дополнение, частота вращения четвертого вращающегося элемента 5d также повышается крутящим моментом, вырабатываем третьим вращающимся элементом 5d.
Как описано, максимальный крутящий момент двигателя 1 может быть ограничен верхними предельными частотами вращения первого электродвигателя 2 и второго электродвигателя 3, присоединенных к дифференциальному механизму 5, и верхними предельными частотами вращения первого сателлита P1 и второго сателлита P2 дифференциального механизма 5. Для того чтобы положить конец такому недостатку, контроллер 11 управляет первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, тем самым, оказывая содействие движущей силе приводить в движение транспортное средство Ve. По этой причине, движущая сила может обеспечиваться даже тогда, когда движущая сила, большая, чем пороговое значение α, требуется при пуске в ход или разгоне транспортного средства Ve, или во время приведения в движения вперед в диапазоне от низкого до среднего числа оборотов. Следовательно, рабочие характеристики транспортного средства Ve в гибридном режиме могут быть улучшены.
Третий пример управления
Как показано на фиг. 7, контроллер 11 дополнительно выполнен с возможностью управлять частотами вращения первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 таким образом, чтобы приводить в действие все из этих электродвигателей 2, 3 и 4 в качестве электродвигателей при оказании содействия движущей силе приводить в движение транспортное средство Ve. На фиг. 7, общие номера этапов назначены этапам, подобным таковым из первого примера, показанного на фиг. 3, и второго примера, показанного на фиг. 6.
Согласно третьему примеру управления, если транспортное средство Ve приводится в движение вперед или пускается в ход в гибридном режиме, а требуемая движущая сила является большей, чем пороговое значение α, то ответом по этапу S20 является Да, процедура продвигается на этап S11 для управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы вырабатывать крутящие моменты в том же самом направлении, что и крутящий момент двигателя. После этого, на этапе S30, частоты вращения первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 управляются таким образом, чтобы приводить в действие все из этих электродвигателей 2, 3 и 4 в качестве электродвигателей, как указано на фиг. 4. После этого, процедура возвращается в точку вызова.
Такое управление на этапе S30 выполняется в пределах диапазона, в котором частоты вращения первого электродвигателя 2 и частота вращения второго электродвигателя 3 являются большими, чем ноль. Более точно, как указано на фиг. 8, частоты вращения первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 управляются таким образом, чтобы число оборотов и крутящий момент двигателя 1 изменялись в пределах заштрихованного диапазона между линией L1 и линией L2. На фиг. 8, линия L1 представляет собой зависимость между числом оборотов двигателя и скоростью транспортного средства по случаю, в котором транспортное средство Ve приводится в движение в неподвижной низкой фазе, где частота вращения второго вращающегося элемента 5b, присоединенного к первому электродвигателю 2 понижена до нуля, а линия L2 представляет собой зависимость между числом оборотов двигателя и скоростью транспортного средства по случаю, в котором транспортное средство Ve приводится в движение в неподвижной высокой фазе, где частота вращения третьего вращающегося элемента 5c, присоединенного ко второму электродвигателю 3, понижена до нуля. В дополнение, линия L3 представляет собой зависимость между числом оборотов двигателя и скоростью транспортного средства по случаю, в котором транспортное средство Ve приводится в движение в прямой фазе, где первый вращающийся элемент 5a, присоединенный к двигателю 1, и пятый вращающийся элемент 5d присоединенный к выходному узлу 7, вращаются на одной и той же частоте вращения.
Здесь, должно быть отмечено, что этапы S11 и S30 также могут выполняться одновременно или могут быть объединены.
Таким образом, согласно третьему примеру управления, контроллер 11 также управляет первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы вырабатывали крутящие моменты в том же самом направлении, что и крутящий момент двигателя, во время приведения в движение в гибридном режиме или при пуске в ход транспортного средства Ve в гибридном режиме. В дополнение, контроллер 11 управляет частотами вращения первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 таким образом, чтобы приводить в действие все из этих электродвигателей 2, 3 и 4 в качестве электродвигателей.
Как описано, в транспортном средстве Ve, двигатель 1, первый электродвигатель 2, третий электродвигатель 3 и выходной узел 7 присоединены к дифференциальному механизму 5 (то есть, устройству распределения мощности). В транспортном средстве Ve, поэтому, когда первый электродвигатель 2 или второй электродвигатель 3 приводится в действие в качестве генератора, получающееся в результате электричество подается в третий электродвигатель 4 и потребляется третьим электродвигателем 4. В этой ситуации, электрическая мощность, требуемая для возбуждения третьего электродвигателя 4 (то есть, мощность возбуждения), определяется на основании суммарной величины электрической мощности, вырабатываемой первым электродвигателем 2 и вторым электродвигателем 3, и мощности аккумуляторной батареи. Если мощность возбуждения превышает имеющуюся в распоряжении мощность на выходном валу третьего электродвигателя 4, мощность аккумуляторной батареи будет избыточной. Для того чтобы положить конец такому недостатку, контроллер 11 приводит в действие все из первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 в качестве электродвигателей. По этой причине, мощность аккумуляторной батареи может эффективно использоваться посредством уменьшения мощности генерации каждого из первого электродвигателя 2 и второго электродвигателя 3 до нуля при содействии движущей силе крутящими моментами электродвигателей. Следовательно, эффективность использования энергии транспортного средства Ve может быть улучшена.
Четвертый пример управления
Как показано на фиг. 9, контроллер 11 дополнительно выполнен с возможностью управлять одним из первого электродвигателя 2 и второго электродвигателя 3 таким образом, чтобы повышать крутящий момент на выходном валу другого одного из первого электродвигателя 2 и второго электродвигателя 3, когда текущее верхнее предельное значение крутящего момента на выходном валу двигателя 1 является меньшим, чем расчетный максимальный крутящий момент двигателя. На фиг. 9, общий номер этапа назначен этапу, подобному таковому из вышеизложенных примеров.
Согласно четвертому примеру управления, если транспортное средство Ve приводится в движение или пускается в ход двигателем 1, так что ответом по этапу S10 является Да, процедура продвигается на этап S40, чтобы определять, является или нет текущий максимальный крутящий момент двигателя 1 меньшим, чем расчетный максимальный крутящий момент двигателя 1.
Если текущий максимальный крутящий момент двигателя 1 не является меньшим, чем расчетный максимальный крутящий момент двигателя 1, то есть, если двигатель 1 находится в состоянии, возможном для вырабатывания расчетного максимального крутящего момента, так что ответом на этапе S40 является Нет, процедура возвращается в точку вызова, не выполняя последующие управляющие воздействия. В этом случае, необходимо оказывать содействие движущей силе крутящими моментами первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4. В противоположность, если текущий максимальный крутящий момент двигателя 1 является меньшим, чем расчетный максимальный крутящий момент двигателя 1, так что ответом на этапе S40 является Да, процедура продвигается на этап S41.
На этапе S41, один из первого электродвигателя 2 и второго электродвигателя 3 управляется таким образом, чтобы повышать крутящий момент на выходном валу другого одного из первого электродвигателя 2 и второго электродвигателя 3. Согласно четвертому примеру управления, более точно, крутящий момент первого электродвигателя 2 управляется таким образом, чтобы повышать крутящий момент на выходном валу второго электродвигателя 3. После этого, процедура возвращается в точку вызова.
Таким образом, когда текущий верхний предельный крутящий момент двигателя 1 является меньшим, чем расчетный максимальный крутящий момент, контроллер 11 управляет одним из первого электродвигателя 2 и второго электродвигателя 3, присоединенных к дифференциальному механизму 5, таким образом, чтобы повышать крутящий момент на выходном валу другого электродвигателя. По этой причине, движущей силе для приведения в движение транспортного средства Ve может эффективно оказываться содействие крутящими моментами первого электродвигателя 2 и второго электродвигателя 3, даже когда крутящий момент на выходном валу двигателя 1 ограничен.
Пятый пример управления
Как показано на фиг. 10, контроллер 11 дополнительно выполнен с возможностью управлять первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы доводить до максимума результирующую силу: движущей силы, сформированной крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7; и движущей силы, сформированной крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7. На фиг. 10, общий номер этапа назначен этапу, подобному таковому из вышеизложенных примеров.
Согласно пятому примеру, если транспортное средство Ve приводится в движение или пускается в ход двигателем 1, так что ответом по этапу S10 является Да, процедура продвигается на этап S50, чтобы определять, является или нет требуемая мощность аккумуляторной батареи большей, чем максимальная мощность аккумуляторной батареи 1. Более точно, требуемая мощность аккумуляторной батареи является мощностью, требуемой для подачи электричества на первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4, чтобы вырабатывали крутящие моменты электродвигателей, с тем чтобы добиваться требуемой движущей силы совместно с крутящим моментом двигателя. Например, требуемая мощность аккумуляторной батареи может рассчитываться на основании текущей скорости транспортного средства, числа оборотов двигателя и требуемой движущей силы. С другой стороны, максимальная мощность аккумуляторной батареи является максимально возможной отдаваемой мощностью аккумуляторной батареи при текущем уровне SOC.
Если требуемая мощность аккумуляторной батареи является меньшей, чем максимальная мощность аккумуляторной батареи, так что ответом на этапе S50 является Нет, процедура возвращается в точку вызова, не выполняя последующие управляющие воздействия. В этом случае, максимальная движущая сила может формироваться посредством приведения в действие первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4 без выполнения какого бы то ни было специального управляющего воздействия. В противоположность, если требуемая мощность аккумуляторной батареи является большей, чем максимальная мощность аккумуляторной батареи, так что ответом на этапе S50 является Да, процедура продвигается на этап S51.
На этапе S51, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 управляются таким образом, чтобы повышать движущую силу для приведения в движение транспортного средства Ve в пределах текущей максимально возможной отдаваемой мощности аккумуляторной батареи. Более точно, по меньшей мере какой-нибудь один из первого электродвигателя 2 и второго электродвигателя 3, присоединенных к дифференциальному механизму 5, присоединенному к двигателю 1, управляется таким образом, чтобы доводить до максимума крутящий момент двигателя. Например, крутящий момент и частота вращения первого электродвигателя 2 настраиваются таким образом, чтобы довести до максимума крутящий момент двигателя. Взамен, крутящий момент и частота вращения второго электродвигателя 3 также могут настраиваться таким образом, чтобы доводить до максимума крутящий момент двигателя. Кроме того, крутящие моменты и частоты вращения первого электродвигателя 2 и второго электродвигателя 3 также могут настраиваться таким образом, чтобы доводить до максимума крутящий момент двигателя. Следовательно, движущая сила, созданная крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7, доводится до максимума. Другими словами, движущая сила, создаваемая синтезированным крутящим моментом из крутящего момента двигателя 1 и крутящих моментов первого электродвигателя 2 и второго электродвигателя 3, доводится до максимума.
После этого, крутящий момент и частота вращения третьего электродвигателя 4 управляются таким образом, чтобы как можно больше использовать текущую максимально возможную отдаваемую мощность аккумуляторной батареи. Более точно, третий электродвигатель 4 управляется таким образом, чтобы вырабатывать максимально возможную отдаваемую мощность из оставшейся мощности аккумуляторной батареи после доведения до максимума крутящего момента двигателя. Следовательно, движущая сила, созданная крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7, доводится до максимума.
В результате управления первым электродвигателем, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, результирующая сила: движущей силы, созданной крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7, может быть доведена до максимума.
После управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 на этапе S51 таким образом, процедура возвращается в точку вызова.
Шестой пример управления
Фиг. 11 показывает пример модификации процедуры, показанной на фиг. 10. Согласно шестому примеру, показанному на фиг. 11, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 также управляются таким образом, чтобы доводить до максимума результирующую силу: движущей силы, созданной крутящим моментом, выдаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7. На фиг. 11, общие номера этапов назначены этапам, подобным таковым из вышеизложенных примеров.
Согласно шестому примеру, если транспортное средство Ve приводится в движение или пускается в ход двигателем 1, так что ответом на этапе S10 является да, процедура продвигается на этап S60 для управления числом оборотов двигателя 1, частотой вращения первого электродвигателя 2 и второго электродвигателя 3 таким образом, чтобы довести до максимума крутящий момент двигателя, приводя в действие первый электродвигатель 2 и второй электродвигатель 3 в качестве электродвигателей. Например, рабочие точки двигателя 1, первого электродвигателя 2 и второго электродвигателя 3 установлены таким образом, чтобы довести до максимума крутящий момент двигателя, наряду с настройкой числа оборотов двигателя на число Ne1 оборотов, попадающее в окружность A, показанную на фиг. 12. Максимальные крутящий момент двигателя и частоты вращения первичных движителей в этой ситуации схематически указаны на фиг. 13 и 14.
После этого, на этапе S50 определяется, чтобы определять, является или нет требуемая мощность аккумуляторной батареи большей, чем максимальная мощность аккумуляторной батареи. Если требуемая мощность аккумуляторной батареи является большей, чем максимальная мощность аккумуляторной батареи, так что ответом на этапе S50 является Да, процедура продвигается на этап S61.
На этапе S61, число оборотов двигателя 1 и частоты вращения и крутящие моменты первого электродвигателя 2 и второго электродвигателя 3 управляются таким образом, чтобы довести до максимума крутящий момент двигателя, посредством приведения в действие первого электродвигателя 2 и второго электродвигателя 3 в качестве электродвигателя. Более точно, рабочие точки двигателя 1, первого электродвигателя 2 и второго электродвигателя 3 установлены таким образом, чтобы довести до максимума крутящий момент двигателя, наряду с настройкой числа оборотов двигателя на число Ne2 оборотов, попадающее в диапазон, указанный линией B, показанной на фиг. 12. Максимальная мощность двигателя и частоты вращения первичных движителей в этой ситуации схематически указаны на фиг. 13 и 15.
В случае, в котором процедура продвигается на этап S61, требуемая мощность аккумуляторной батареи является большей, чем максимальная мощность аккумуляторной батареи. То есть, требуемая движущая сила не может создаваться крутящим моментом только первого электродвигателя 2 и второго электродвигателя 3. На этапе S61, оба из первого электродвигателя 2 и второго электродвигателя 3 приводятся в действие в качестве электродвигателей, чтобы вырабатывать крутящие моменты, а двигатель 1 управляется таким образом, чтобы вырабатывать максимальную мощность. Следовательно, движущая сила, созданная крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7, доводится до максимума. Другими словами, движущая сила, создаваемая синтезированным крутящим моментом из крутящего момента двигателя 1 и крутящих моментов первого электродвигателя 2 и второго электродвигателя 3, доводится до максимума.
После этого, на этапе S62, крутящий момент и частота вращения третьего электродвигателя 4 управляются таким образом, чтобы как можно больше использовать текущую максимально возможную отдаваемую мощность аккумуляторной батареи. Более точно, третий электродвигатель 4 управляется таким образом, чтобы вырабатывать максимально возможную отдаваемую мощность из оставшейся мощности аккумуляторной батареи после доведения до максимума крутящего момента двигателя. Следовательно, движущая сила, созданная крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7, доводится до максимума.
В противоположность, если требуемая мощность аккумуляторной батареи является меньшей, чем максимальная мощность аккумуляторной батареи, так что ответом на этапе S50 является Нет, процедура пропускает этап S61 и продвигается на этап S61. В этом случае, требуемая мощность аккумуляторной батареи может выдаваться из аккумуляторной батареи, а отсюда, максимальная движущая сила может формироваться посредством управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 в соответствии с требуемой мощностью аккумуляторной батареи. Следовательно, движущая сила, созданная крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7, доводится до максимума.
В результате управления первым электродвигателем, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, результирующая сила: движущей силы, созданной крутящим моментом, подаваемым с четвертого вращающегося элемента 5d дифференциального механизма 5 на выходной узел 7; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на выходной узел 7, может быть доведена до максимума.
После управления первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 на этапах S61 и S62 таким образом, процедура возвращается в точку вызова.
Таким образом, когда требуемая мощность аккумуляторной батареи является большей, чем максимальная мощность аккумуляторной батареи, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4 управляются таким образом, чтобы доводить до максимума результирующую силу: движущей силы, созданной крутящим моментом, подаваемым с дифференциального механизма 5 на ведущие колеса 6; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на ведущие колеса 6.
В транспортном средстве Ve, крутящий момент, подаваемый с дифференциального механизма 5 на выходной узел 7, обусловлен крутящими моментами первого электродвигателя 2 и второго электродвигателя 3, присоединенных к дифференциальному механизму 5, и передаточным отношением дифференциального механизма 5. Как описано, транспортное средство Ve приводится в движение результирующей силой: движущей силы, созданной крутящим моментом, подаваемым из дифференциального механизма 5 на ведущие колеса 6 через выходной узел 7; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на ведущие колеса 6 через выходной узел 7. Когда уровень SOC аккумуляторной батареи достаточно высок, вышеупомянутая результирующая движущая сила может доводиться до максимума крутящими моментами первого электродвигателя 2, второго электродвигателя 3 и третьего электродвигателя 4. В этом случае, поэтому, баланс мощностей между первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 может поддерживаться по существу устойчивым, тем временем, создавая максимальную движущую силу. В противоположность, в случае, если требуемая мощность аккумуляторной батареи является большей, чем максимальная мощность аккумуляторной батареи, электричество, подаваемое на электродвигатели, ограничено и, следовательно, баланс мощностей между первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 будет изменяться. Однако, контроллер 11 выполнен с возможностью управлять первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4 таким образом, чтобы доводить до максимума результирующую силу: движущей силы, созданной крутящим моментом, подаваемым с дифференциального механизма 5 на ведущие колеса 6; и движущей силы, созданной крутящим моментом, подаваемым с третьего электродвигателя 4 на ведущие колеса 6. Следовательно, оптимизируется баланс мощностей между первым электродвигателем 2, вторым электродвигателем 3 и третьим электродвигателем 4. По этой причине, движущая сила может доводиться до максимума как можно больше с использованием ограниченной мощности аккумуляторной батареи.
Система управления согласно варианту осуществления также может быть применена к гибридным транспортным средствам, имеющим разные виды кинематических цепей, показанных на фиг. с 16 по 25. На фиг. с 16 по 25, общие номера ссылок назначены элементам, подобным таковым в кинематической цепи, показанной на фиг. 2, и подробное пояснение таких общих элементов будет опущено.
Фиг. 16 показывает второй пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 16, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 16, дополнительно содержит дифференциальный механизм 30, служащий в качестве устройства распределения мощности. Дифференциальный механизм 30 также является узлом составной дифференциальной передачи, включающим в себя первый узел 31 планетарной передачи с одним сателлитом и второй узел 32 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 30 включает в себя первый вращающийся элемент 30a, к которому присоединен двигатель, второй вращающийся элемент 30b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 30c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 30d, к которому присоединен выходной узел 7.
Первый узел 31 планетарной передачи включает в себя первую солнечную шестерню S11, первую коронную шестерню R11 и первое водило C11. Подобным образом, второй узел 32 планетарной передачи включает в себя вторую солнечную шестерню S21, вторую коронную шестерню R21 и второе водило C21. Первая коронная шестерня R11 и второе водило C21 присоединены друг к другу, и первое водило C11 и вторая коронная шестерня R21 присоединены друг к другу.
В дифференциальном механизме 30, первая коронная шестерня R11 и второе водило C21 присоединены к выходному валу 1a двигателя 1, первая солнечная шестерня S11 присоединена к выходному валу 2a первого электродвигателя 2, вторая солнечная шестерня S21 присоединена к выходному валу 3a второго электродвигателя 3, а первое водило C11 и вторая коронная шестерня R21 присоединены к выходному узлу 7.
В дифференциальном механизме 30, соответственно, первая коронная шестерня R11 и второе водило C21 служат в качестве первого вращающегося элемента 30a, первая солнечная шестерня S11 служит в качестве второго вращающегося элемента 30b, вторая солнечная шестерня S21 служит в качестве третьего вращающегося элемента 30c, а первое водило C11 и вторая коронная шестерня R21 служат в качестве четвертого вращающегося элемента 30d.
Фиг. 17 показывает третий пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 17, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 17, дополнительно содержит дифференциальный механизм 40, служащий в качестве устройства распределения мощности. Дифференциальный механизм 40 также является узлом составной дифференциальной передачи, включающим в себя первый узел 41 планетарной передачи с одним сателлитом и второй узел 42 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 40 включает в себя первый вращающийся элемент 40a, к которому присоединен двигатель, второй вращающийся элемент 40b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 40c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 40d, к которому присоединен выходной узел 7.
Первый узел 41 планетарной передачи включает в себя первую солнечную шестерню S12, первую коронную шестерню R12 и первое водило C12. Подобным образом, второй узел 42 планетарной передачи включает в себя вторую солнечную шестерню S22, вторую коронную шестерню R22 и второе водило C22. Первая солнечная шестерня S12 и вторая солнечная шестерня S22 присоединены друг к другу, и первая коронная шестерня R12 и второе водило C22 присоединены друг к другу.
В дифференциальном механизме 40, первое водило C12 присоединено к выходному валу 1a двигателя 1, первая солнечная шестерня S12 и вторая солнечная шестерня S22 присоединены к выходному валу 2a первого электродвигателя 2, вторая коронная шестерня R22 присоединена к выходному валу 3a второго электродвигателя 3, и первая коронная шестерня R12 и второе водило C22 присоединены к выходному узлу 7.
В дифференциальном механизме 40, соответственно, первое водило C12 служит в качестве первого вращающегося элемента 40a, первая солнечная шестерня S12 и вторая солнечная шестерня S22 служат в качестве второго вращающегося элемента 40b, вторая коронная шестерня R22 служит в качестве третьего вращающегося элемента 40c, а первая коронная шестерня R12 и второе водило C22 служат в качестве четвертого вращающегося элемента 40d.
Фиг. 18 показывает четвертый пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 18, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 18, дополнительно содержит дифференциальный механизм 50, служащий в качестве устройства распределения мощности. Дифференциальный механизм 50 также является узлом составной дифференциальной передачи, включающим в себя первый узел 51 планетарной передачи с одним сателлитом и второй узел 52 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 50 включает в себя первый вращающийся элемент 50a, к которому присоединен двигатель, второй вращающийся элемент 50b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 50c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 50d, к которому присоединен выходной узел 7.
Первый узел 51 планетарной передачи включает в себя первую солнечную шестерню S13, первую коронную шестерню R13 и первое водило C13. Подобным образом, второй узел 52 планетарной передачи включает в себя вторую солнечную шестерню S23, вторую коронную шестерню R23 и второе водило C23. Первая коронная шестерня R13 и второе водило C23 присоединены друг к другу, и первое водило C13 и вторая коронная шестерня R23 присоединены друг к другу.
В дифференциальном механизме 50, первая коронная шестерня R13 и второе водило C23 присоединены к выходному валу 1a двигателя 1, первая солнечная шестерня S13 присоединена к выходному валу 3a второго электродвигателя 3, вторая солнечная шестерня S23 присоединена к выходному валу 2a первого электродвигателя 2, а первое водило C13 и вторая коронная шестерня R23 присоединены к выходному узлу 7.
В дифференциальном механизме 50, соответственно, первая коронная шестерня R13 и второе водило C23 служат в качестве первого вращающегося элемента 50a, вторая солнечная шестерня S23 служит в качестве второго вращающегося элемента 50b, первая солнечная шестерня S13 служит в качестве третьего вращающегося элемента 50c, а первое водило C13 и вторая коронная шестерня R23 служат в качестве четвертого вращающегося элемента 50d.
Фиг. 19 показывает пятый пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 19, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 19, дополнительно содержит дифференциальный механизм 60, служащий в качестве устройства распределения мощности. Дифференциальный механизм 60 также является узлом составной дифференциальной передачи, включающим в себя первый узел 61 планетарной передачи с одним сателлитом и второй узел 62 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 60 включает в себя первый вращающийся элемент 60a, к которому присоединен двигатель, второй вращающийся элемент 60b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 60c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 60d, к которому присоединен выходной узел 7.
Первый узел 61 планетарной передачи включает в себя первую солнечную шестерню S14, первую коронную шестерню R14 и первое водило C14. Подобным образом, второй узел 62 планетарной передачи включает в себя вторую солнечную шестерню S24, вторую коронную шестерню R24 и второе водило C24. Первая солнечная шестерня S14 и вторая солнечная шестерня S24 присоединены друг к другу, и первое водило C14 и второе водило C24 присоединены друг к другу.
В дифференциальном механизме 60, первая коронная шестерня R14 присоединена к выходному валу 1a двигателя 1, первая солнечная шестерня S14 и вторая коронная шестерня R24 присоединены к выходному валу 2a первого электродвигателя 2, вторая солнечная шестерня S24 присоединена к выходному валу 3a второго электродвигателя 3, и первое водило C14 и второе водило C24 присоединены к выходному узлу 7.
В дифференциальном механизме 60, соответственно, первая коронная шестерня R14 служит в качестве первого вращающегося элемента 60a, первая солнечная шестерня S14 и вторая коронная шестерня R24 служат в качестве второго вращающегося элемента 60b, вторая солнечная шестерня S24 служит в качестве третьего вращающегося элемента 60c, а первое водило C14 и второе водило C24 служат в качестве четвертого вращающегося элемента 60d.
Фиг. 20 показывает шестой пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 20, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 20, дополнительно содержит дифференциальный механизм 70, служащий в качестве устройства распределения мощности. Дифференциальный механизм 70 также является узлом составной дифференциальной передачи, включающим в себя первый узел 71 планетарной передачи с одним сателлитом и второй узел 72 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 70 включает в себя первый вращающийся элемент 70a, к которому присоединен двигатель, второй вращающийся элемент 70b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 70c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 70d, к которому присоединен выходной узел 7.
Первый узел 71 планетарной передачи включает в себя первую солнечную шестерню S15, первую коронную шестерню R15 и первое водило C15. Подобным образом, второй узел 72 планетарной передачи включает в себя вторую солнечную шестерню S25, вторую коронную шестерню R25 и второе водило C25. Первое водило C15 и второе водило C25 присоединены друг к другу, и первая солнечная шестерня S15 и вторая коронная шестерня R25 присоединены друг к другу.
В дифференциальном механизме 70, первое водило C15 и второе водило C25 присоединены к выходному валу 1a двигателя 1, первая солнечная шестерня S15 и вторая коронная шестерня R25 присоединены к выходному валу 2a первого электродвигателя 2, вторая солнечная шестерня S25 присоединена к выходному валу 3a второго электродвигателя 3, и первая коронная шестерня R15 присоединена к выходному узлу 7.
В дифференциальном механизме 70, соответственно, первое водило C15 и второе водило C25 служат в качестве первого вращающегося элемента 70a, первая солнечная шестерня S15 и вторая коронная шестерня R25 служат в качестве второго вращающегося элемента 70b, вторая солнечная шестерня S25 служит в качестве третьего вращающегося элемента 70c, а первая коронная шестерня R15 служит в качестве четвертого вращающегося элемента 70d.
Фиг. 21 показывает седьмой пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 21, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 21, дополнительно содержит дифференциальный механизм 80, служащий в качестве устройства распределения мощности. Дифференциальный механизм 80 также является узлом составной дифференциальной передачи, включающим в себя первый узел 81 планетарной передачи с одним сателлитом и второй узел 82 планетарной передачи с одним сателлитом, присоединенными друг к другу. Дифференциальный механизм 80 включает в себя первый вращающийся элемент 80a, к которому присоединен двигатель, второй вращающийся элемент 80b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 80c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 80d, к которому присоединен выходной узел 7.
Первый узел 81 планетарной передачи включает в себя первую солнечную шестерню S16, первую коронную шестерню R16 и первое водило C16. Подобным образом, второй узел 82 планетарной передачи включает в себя вторую солнечную шестерню S26, вторую коронную шестерню R26 и второе водило C26. Первое водило C16 и вторая коронная шестерня R2 присоединены друг к другу, и первая коронная шестерня R16 и вторая солнечная шестерня S26 присоединены друг к другу.
В дифференциальном механизме 80, первое водило C15 и вторая коронная шестерня R26 присоединены к выходному валу 1a двигателя 1, первая солнечная шестерня S16 присоединена к выходному валу 2a первого электродвигателя 2, второе водило C26 присоединено к выходному валу 3a второго электродвигателя 3, а первая коронная шестерня R16 и вторая солнечная шестерня S26 присоединены к выходному узлу 7.
В дифференциальном механизме 80, соответственно, первое водило C16 и вторая коронная шестерня R26 служат в качестве первого вращающегося элемента 80a, первая солнечная шестерня S16 служит в качестве второго вращающегося элемента 80b, второе водило C26 служит в качестве третьего вращающегося элемента 80c, а первая коронная шестерня R16 и вторая солнечная шестерня S26 служат в качестве четвертого вращающегося элемента 80d.
Согласно варианту осуществления настоящего изобретения, другие виды узлов планетарной передачи, такие как узел планетарной передачи с двумя сателлитами и узел планетарной передачи Равигнауха, также могут использоваться в качестве дифференциального механизма вместо узла планетарной передачи с одним сателлитом.
Фиг. 22 показывает восьмой пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 22, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 22, дополнительно содержит дифференциальный механизм 90, служащий в качестве устройства распределения мощности. В кинематической цепи, показанной на фиг. 22, узел 91 планетарной передачи Равигнауха используется в качестве дифференциального механизма 90. Дифференциальный механизм 90 включает в себя первый вращающийся элемент 90a, к которому присоединен двигатель, второй вращающийся элемент 90b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 90c, к которому присоединен второй электродвигатель 3, и четвертый вращающийся элемент 90d, к которому присоединен выходной узел 7.
Узел 91 планетарной передачи Равигнауха включает в себя первую солнечную шестерню S17, коронную шестерню R17, водило C17 и вторую солнечную шестерню S27. Более точно, узел 91 планетарной передачи Равигнауха включает в себя первую солнечную шестерню S17, коронную шестерню R17, скомпонованную вокруг первой солнечной шестерни S17, вторую солнечную шестерню S27, скомпонованную соосно с первой солнечной шестерней S17, тем временем, будучи наделенной возможностью вращаться относительно нее, множество коротких сателлитов P17, зацепляющихся с первой солнечной шестерней S17 и кольцевой шестерней R17, множество длинных сателлитов P27, присоединенных по отдельности к коротким сателлитам P17, тем временем, будучи зацепленными со второй солнечной шестерней S27, и водило C17, поддерживающее короткие сателлиты P17 и длинные сателлиты P27 допускающим вращение образом.
В узле 91 дифференциальной передачи Равигнауха, водило C17 присоединено к выходному валу 1a двигателя 1, первая солнечная шестерня S17 присоединена к выходному валу 2a первого электродвигателя 2, вторая солнечная шестерня S27 присоединена к выходному валу 3a второго электродвигателя 3, и первая коронная шестерня R17 присоединена к выходному узлу 7.
В дифференциальном механизме 90, соответственно, водило C17 служит в качестве первого вращающегося элемента 90a, первая солнечная шестерня S17 служит в качестве второго вращающегося элемента 90b, вторая солнечная шестерня S27 служит в качестве третьего вращающегося элемента 90c, и коронная шестерня R17 служит в качестве четвертого вращающегося элемента 90d.
Согласно варианту осуществления настоящего изобретения, дифференциальный механизм, имеющий пять вращающихся элементов, также может использоваться вместо вышеизложенных дифференциальных механизмов.
Фиг. 23 показывает девятый пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 23, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 24, дополнительно содержит дифференциальный механизм 100, служащий в качестве устройства распределения мощности. Дифференциальный механизм 100 является узлом составной дифференциальной передачи, сформированным посредством объединения первого узла 101 планетарной передачи с одним сателлитом, второго узла 102 планетарной передачи с одним сателлитом и третьего узла 103 планетарной передачи с одним сателлитом. Дифференциальный механизм 100 включает в себя первый вращающийся элемент 100a, к которому присоединен двигатель, второй вращающийся элемент 100b, к которому присоединен первый электродвигатель 2, третий вращающийся элемент 100c, к которому присоединен второй электродвигатель 3, четвертый вращающийся элемент 100d, к которому присоединен выходной узел 7, и пятый вращающийся элемент 100e, к которому присоединены двигатель 1 и первый вращающийся элемент 100a.
Первый узел 101 планетарной передачи включает в себя первую солнечную шестерню S18, первую коронную шестерню R18 и первое водило C18. Подобным образом, второй узел 102 планетарной передачи включает в себя вторую солнечную шестерню S28, вторую коронную шестерню R28 и второе водило C28. Подобным образом, третий узел 103 планетарной передачи включает в себя третью солнечную шестерню S38, третью коронную шестерню R38 и третье водило C38. Первая солнечная шестерня S18 и второе водило C28 присоединены друг к другу, первая коронная шестерня R18 и вторая солнечная шестерня S28 присоединены друг к другу, вторая коронная шестерня R28 и третья коронная шестерня R38 присоединены друг к другу, и первое водило C18 и третье водило C38 присоединены друг к другу.
В дифференциальном механизме 100, первая коронная шестерня R18 присоединена к выходному валу 1a двигателя 1, вторая коронная шестерня R28 и третья коронная шестерня R38 присоединены к выходному валу 2a первого электродвигателя 2, третья солнечная шестерня S38 присоединена к выходному валу 3a второго электродвигателя 3, первое водило C18 и третье водило C38 присоединены к выходному узлу 7, а вторая солнечная шестерня S28 и первая коронная шестерня R18 присоединены к выходному валу 1a двигателя 1.
В дифференциальном механизме 100, соответственно, первая коронная шестерня R18 служит в качестве первого вращающегося элемента 100a, вторая коронная шестерня R26 и третья коронная шестерня R38 служат в качестве второго вращающегося элемента 100b, третья солнечная шестерня S38 служит в качестве третьего вращающегося элемента 100c, первое водило C18 и третье водило C38 служат в качестве четвертого вращающегося элемента 100d, а вторая солнечная шестерня S28 служит в качестве пятого вращающегося элемента 100e.
Согласно варианту осуществления настоящего изобретения, каждая пара передних колес и задних колес может быть по отдельности оснащена выходным узлом для подачи мощности на такие пары колес.
Фиг. 24 показывает десятый пример кинематической цепи транспортного средства Ve, в котором передние колеса служат в качестве ведущих колес 6. В транспортном средстве Ve, показанном на фиг. 24, первичный движитель также включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3 и третий электродвигатель 4. Транспортное средство Ve, показанное на фиг. 24, дополнительно содержит первый выходной узел 201 и второй выходной узел 202.
Первый выходной узел 201 включает в себя ведущую шестерню 21, вал 22 контрпривода, ведомую шестерню 23 контрпривода, ведущую шестерню 24 колесной передачи и узел 25 дифференциальной передачи. Ведущая шестерня 21 вращается как целая часть со вторым водилом C2 дифференциального механизма 5. То есть, первый выходной узел 201 присоединен к четвертому вращающемуся элементу 5d дифференциального механизма 5, чтобы подавать мощность на ведущие колеса 6. В кинематической цепи, показанной на фиг. 24, третий электродвигатель 4 не присоединен к первому выходному узлу 201, но присоединен ко второму выходному узлу 202.
Второй выходной узел 202 включает в себя вал 203 контрпривода, ведомую шестерню 204 контрпривода, ведущую шестерню 205 колесной передачи и узел 206 дифференциальной передачи. Ведомая шестерня 204 контрпривода посажена на одну из концевых частей вала 203 контрпривода (то есть, с правой стороны на фиг. 24), а ведущая шестерня 205 колесной передачи посажена на другую концевую часть вала 203 контрпривода (то есть, с левой стороны на фиг. 24), тем временем, будучи зацепленной с ведомой шестерней 207 колесной передачи узла 206 дифференциальной передачи. Узел 206 дифференциальной передачи присоединен к каждому из ведущих колес 209 через каждый из приводных валов 208.
Крутящий момент третьего электродвигателя 4 может прикладываться к ведущим колесам 209. С этой целью, выходной вал 4a третьего электродвигателя 4 скомпонован параллельно валу 203 контрпривода, а сателлит 210 насажен на передний конец (то есть на левую сторону на фиг. 24) выходного вала 4a, тем временем, будучи зацепленным с ведомой шестерней 204 контрпривода. То есть, третий электродвигатель 4 присоединен к ведущим колесам 209 через второй выходной узел 202, с тем чтобы подавать крутящий момент на ведущие колеса 209 через приводные валы 208.
Согласно варианту осуществления настоящего изобретения, система управления также может быть применена к транспортному средству, в котором первичный движитель включает в себя двигатель и четыре электродвигателя.
Фиг. 25 показывает одиннадцатый пример кинематической цепи транспортного средства Ve. В транспортном средстве Ve, показанном на фиг. 25, первичный движитель включает в себя двигатель 1, первый электродвигатель 2, второй электродвигатель 3, третий электродвигатель 4 и пятый электродвигатель 220 (указываемый ссылкой как «MG4» на фиг. 25). Транспортное средство Ve, показанное на фиг. 23, дополнительно содержит первый выходной узел 221 и второй выходной узел 222.
Конструкция первого выходного узла 221 аналогична таковой у выходного узла 7. То есть, первый выходной узел 221 присоединен к четвертому вращающемуся элементу 5d дифференциального механизма 5, чтобы подавать мощность на ведущие колеса 6. В кинематической цепи, показанной на фиг. 25, третий электродвигатель 4 присоединен к первому выходному узлу 221, чтобы подавать крутящий момент на передние колеса, служащие в качестве ведущих колес 6.
Конструкция второго выходного узла 222 аналогична таковой у второго выходного узла 202. Четвертый электродвигатель 220 присоединен ко второму выходному узлу 222, чтобы подавать крутящий момент на задние колеса, служащие в качестве ведущих колес 209, через приводные валы 208.
Хотя был описан вышеприведенный примерный вариант осуществления настоящего изобретения, специалистам в данной области техники будет понятно, что настоящая заявка не должна ограничиваться описанным примерным вариантом осуществления, и различные изменения и модификации могут быть произведены в пределах сущности и объема настоящего изобретения.
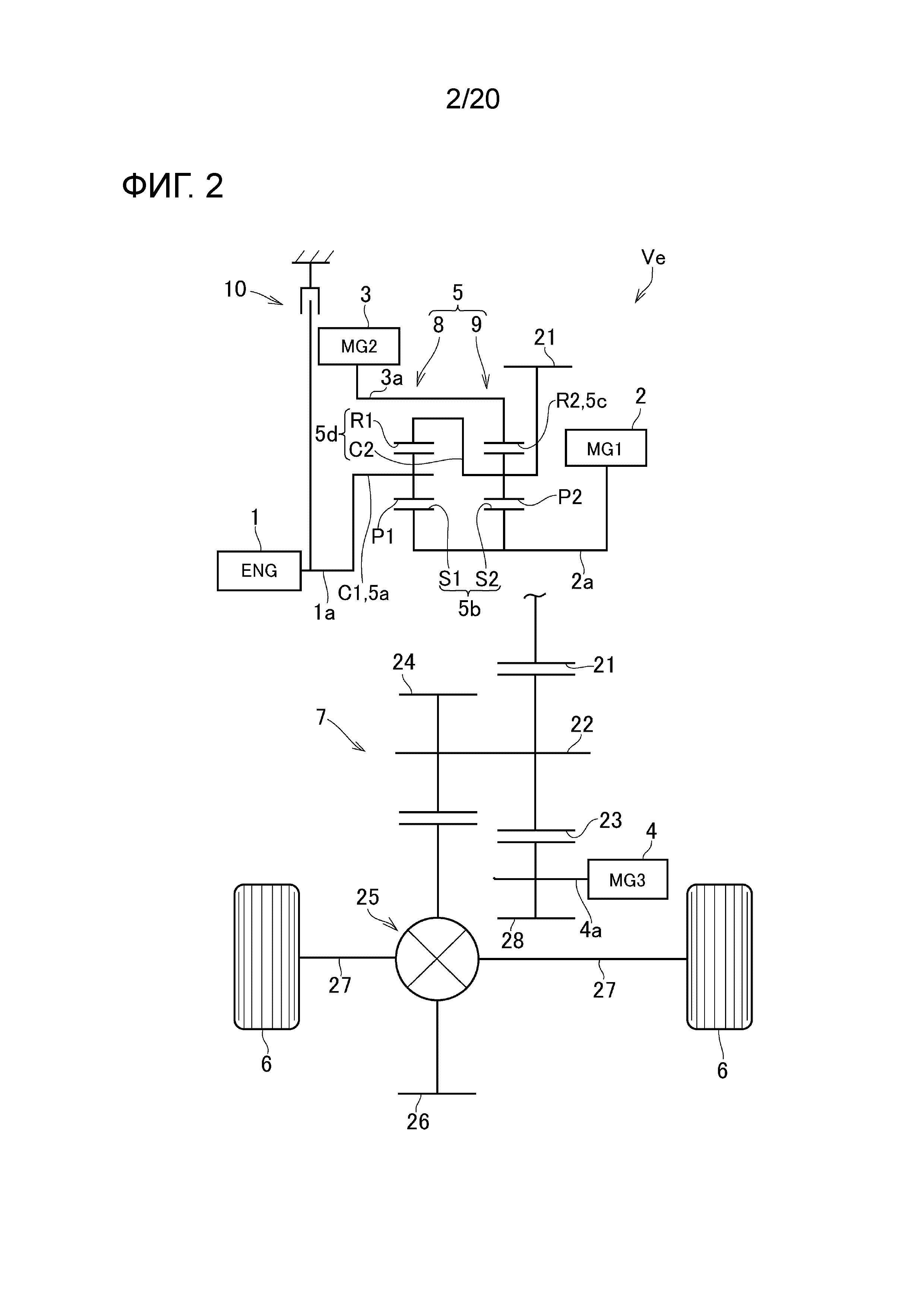
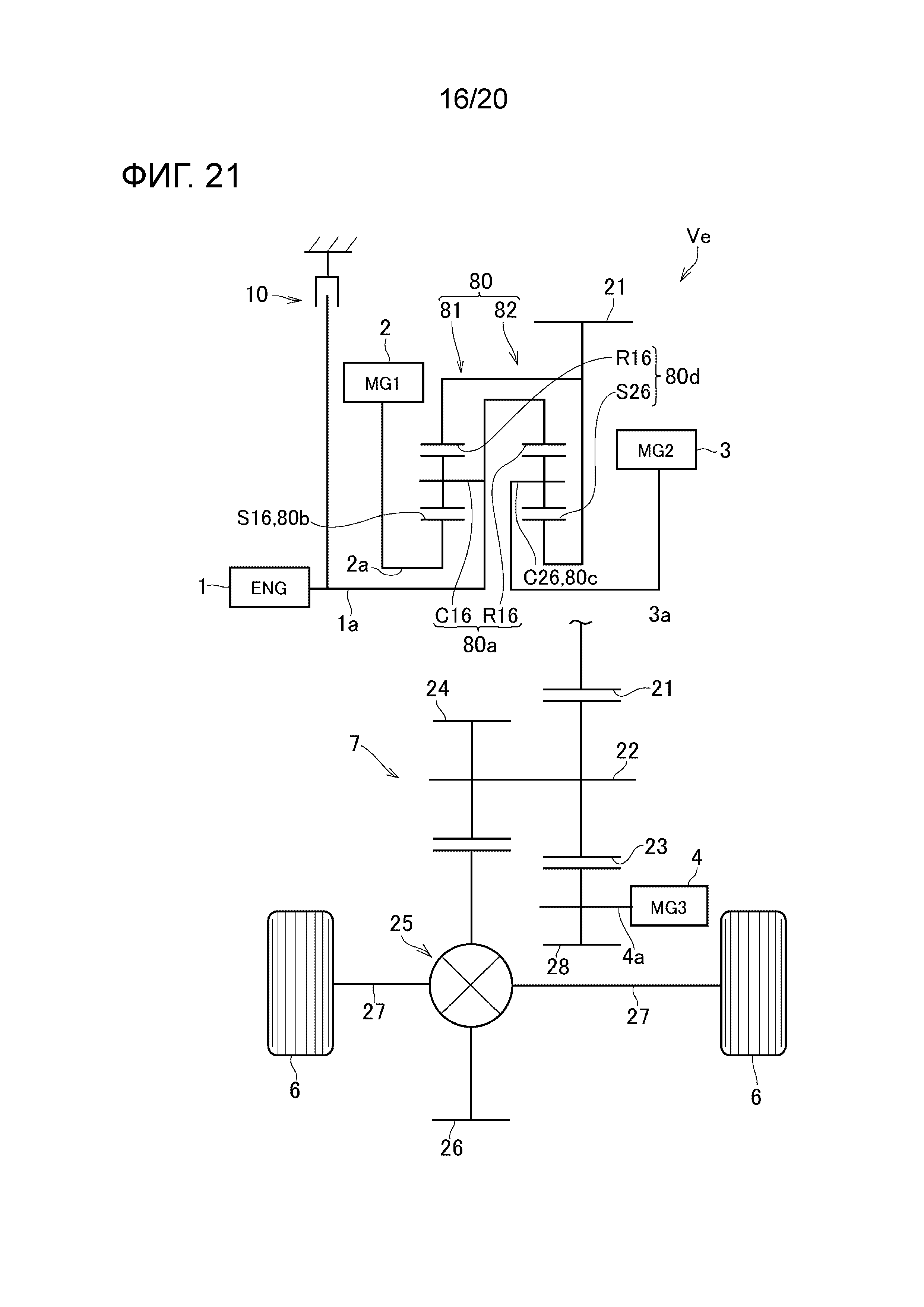
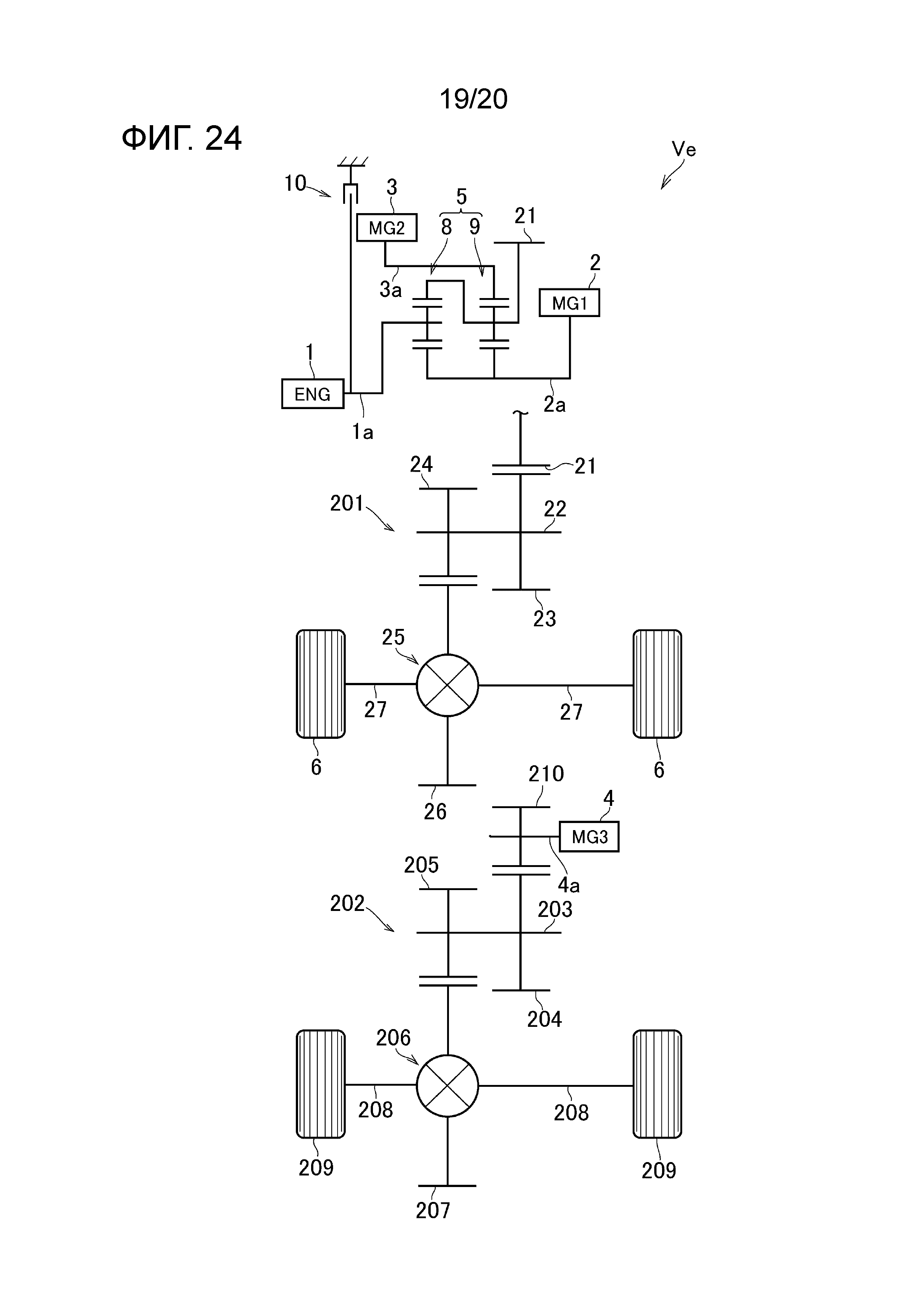
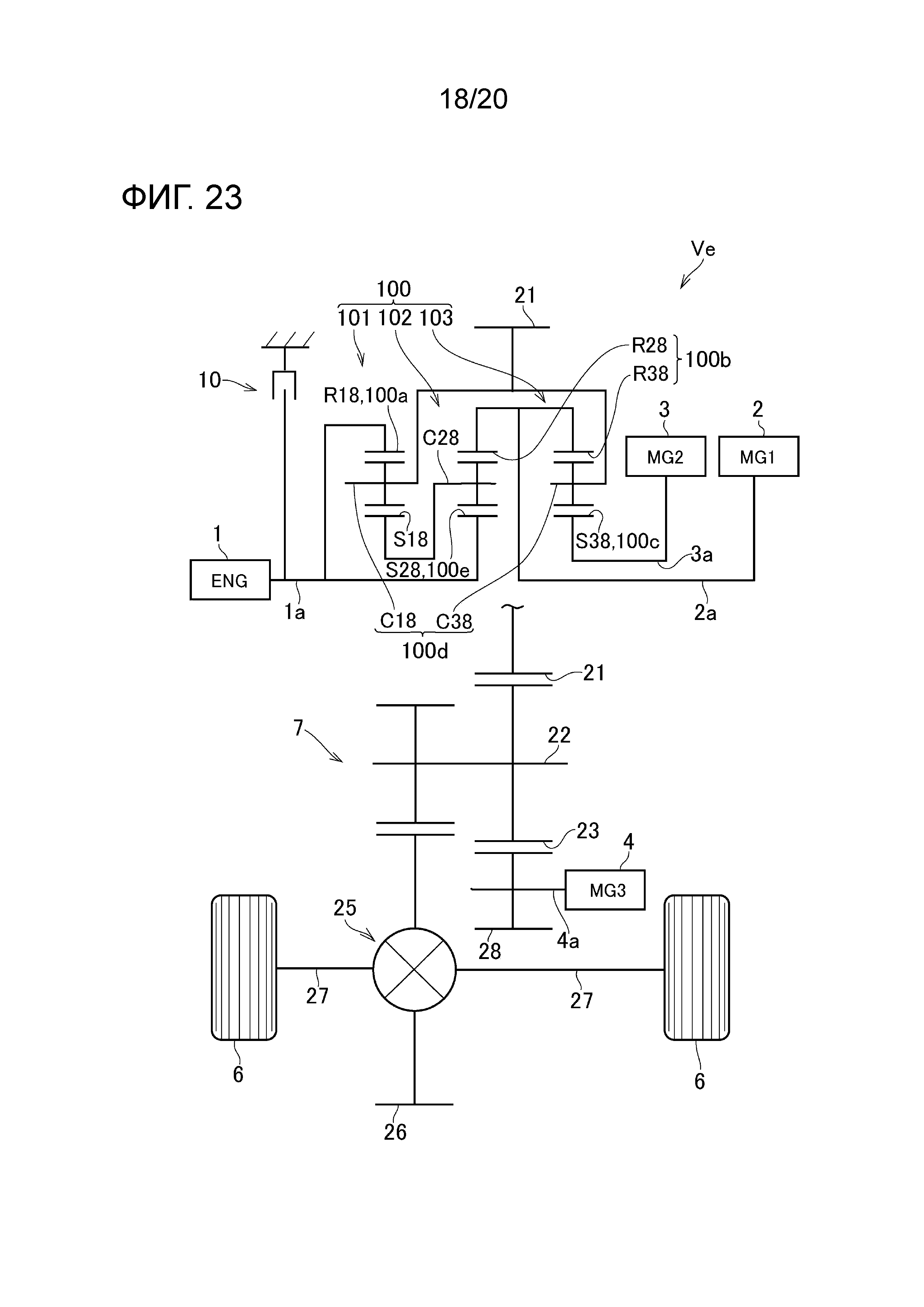
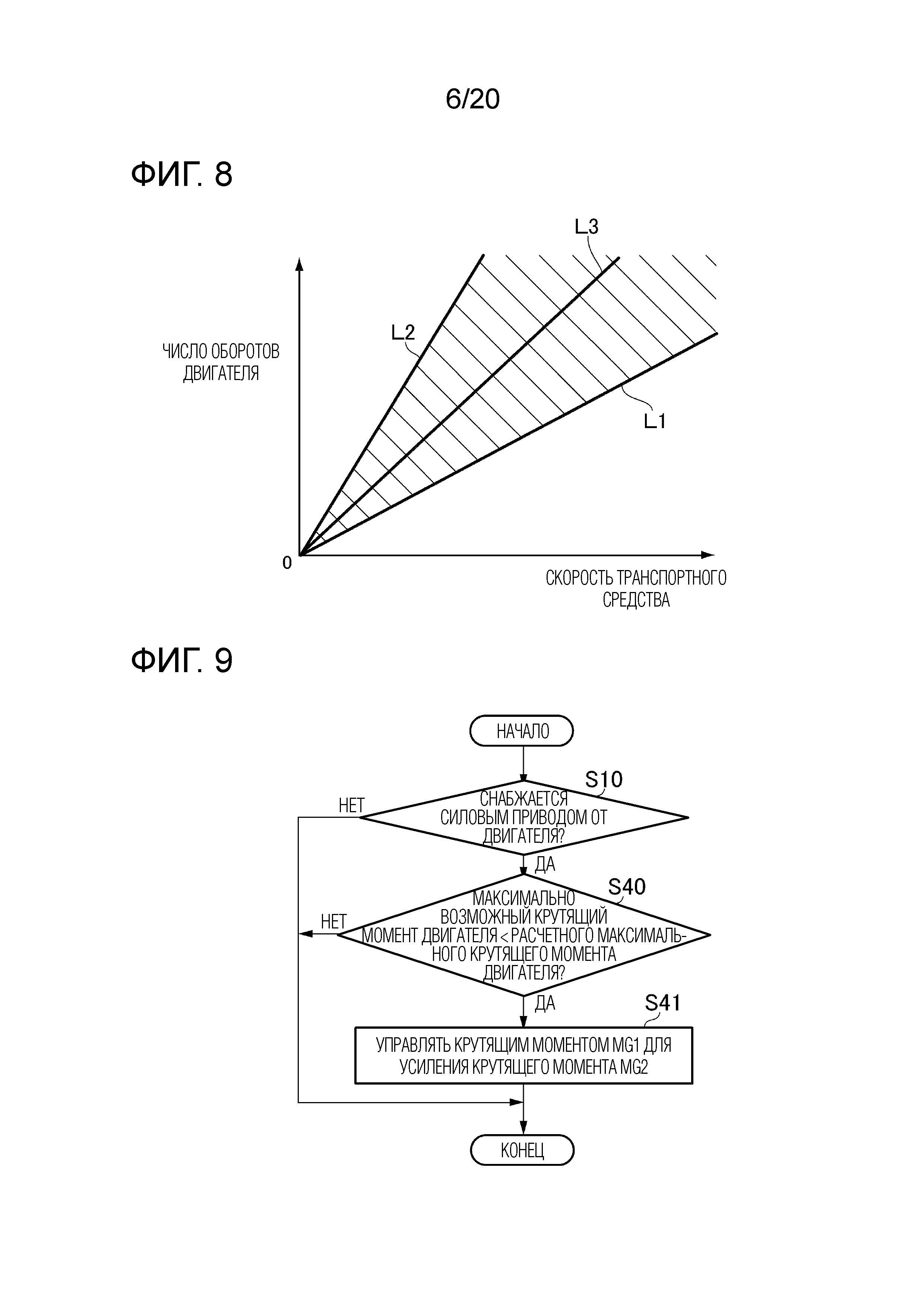
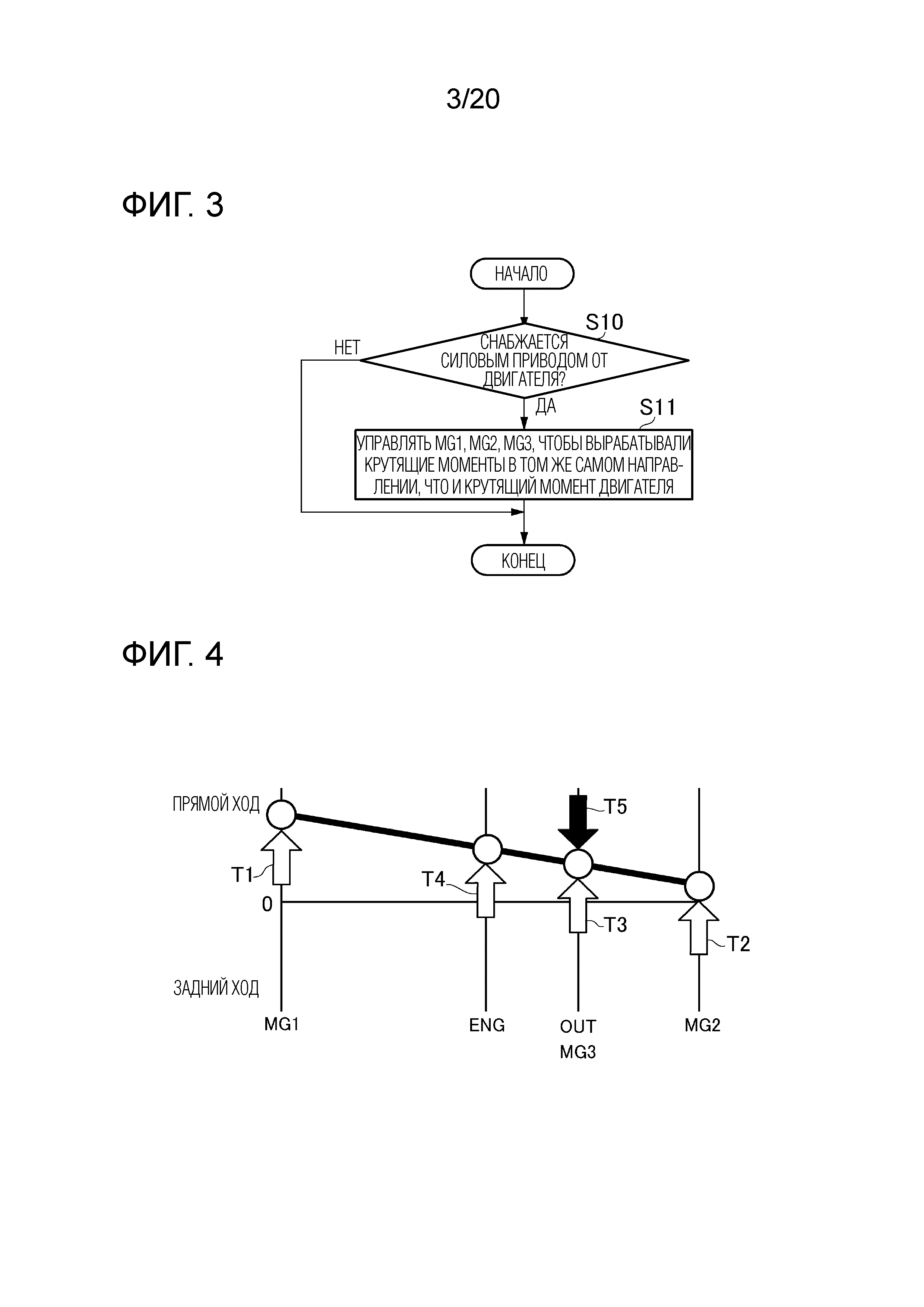
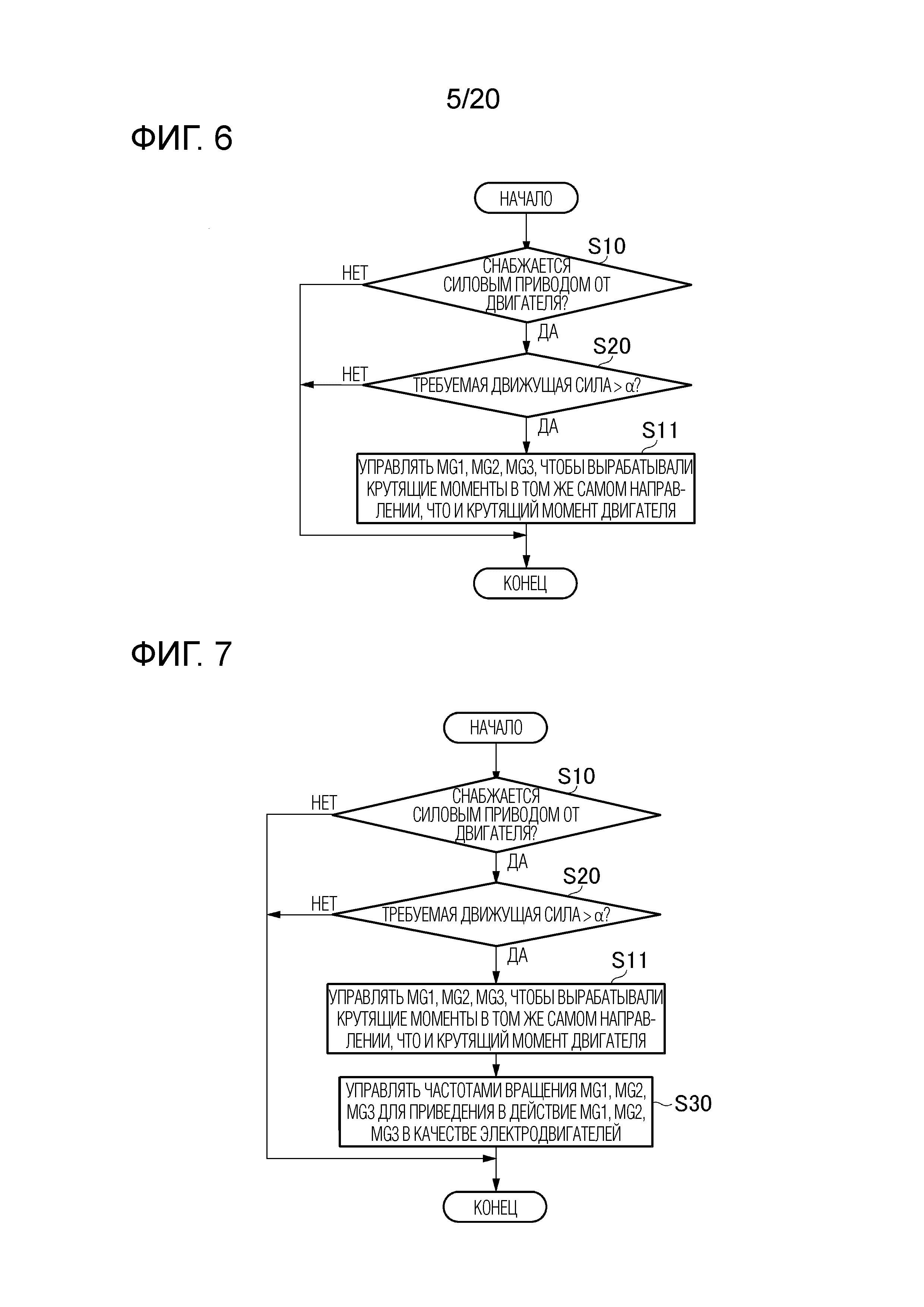
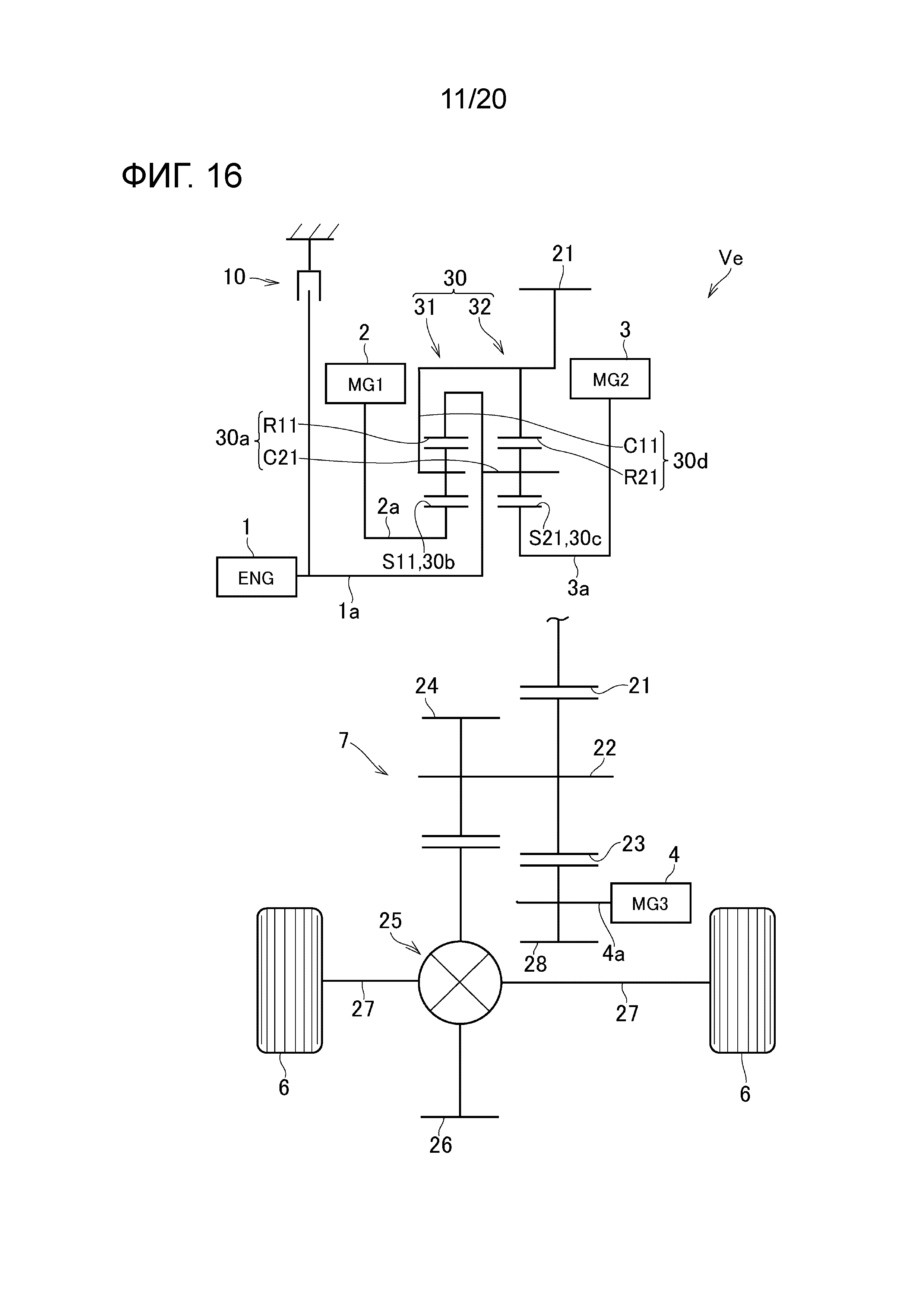
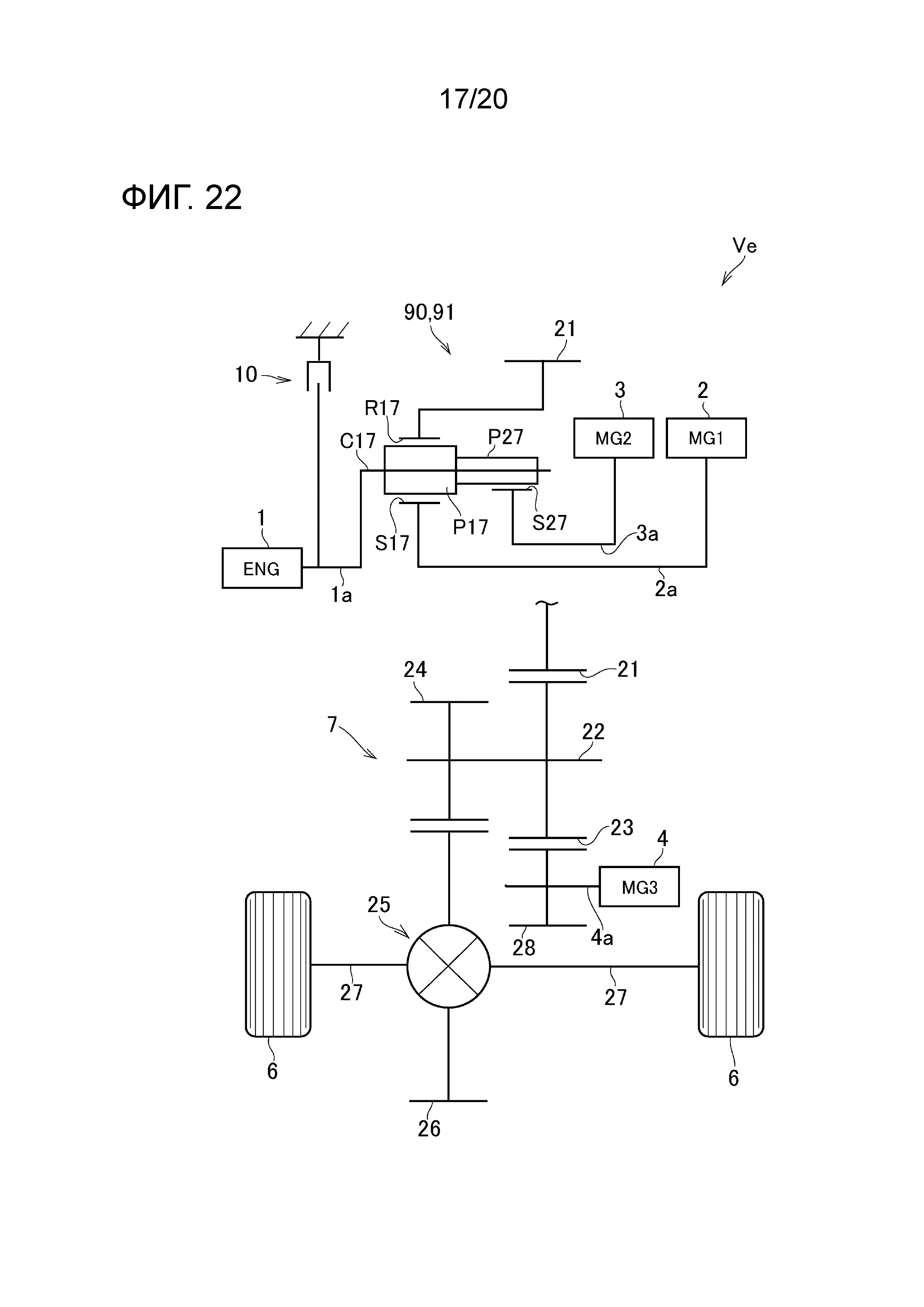
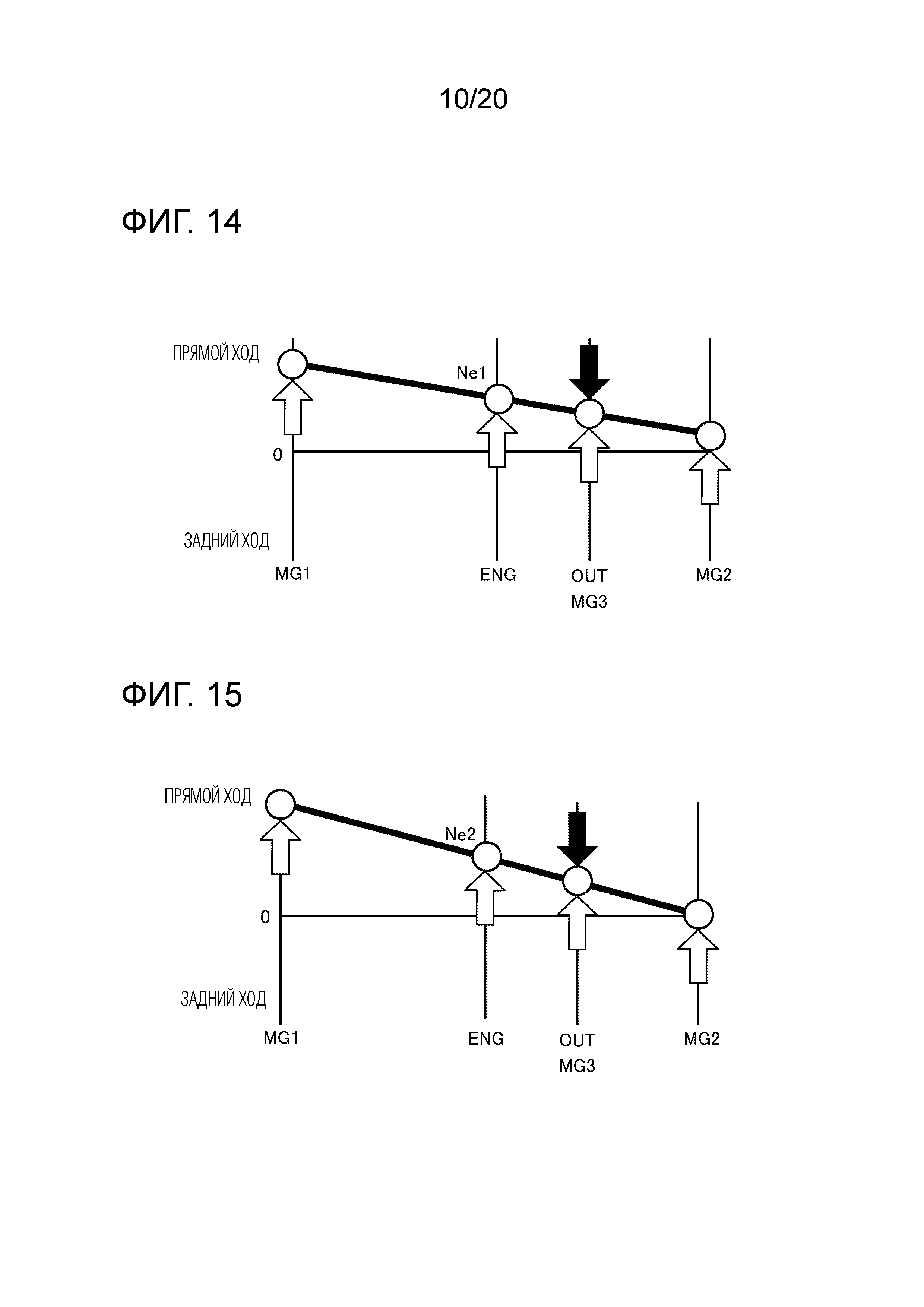
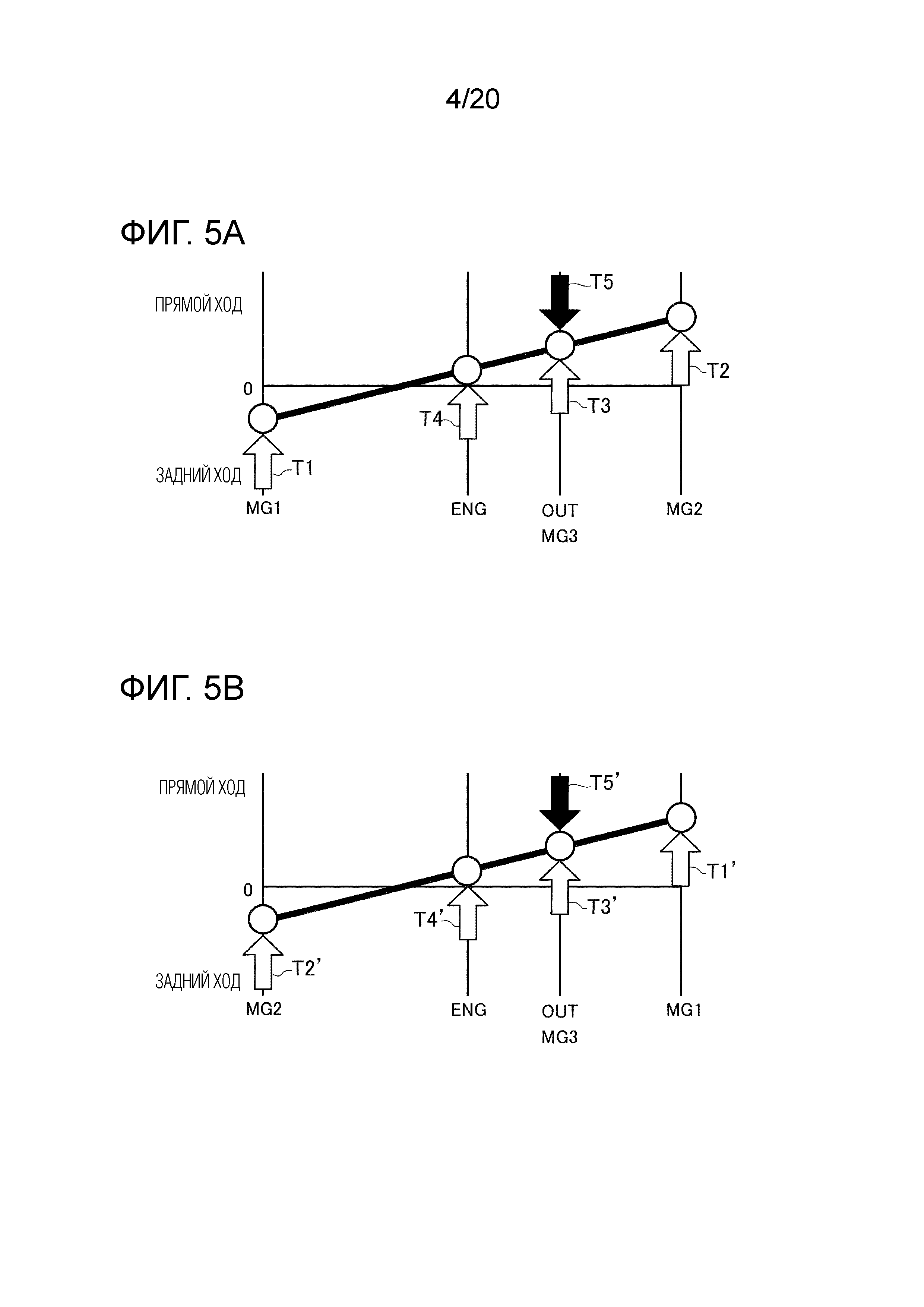
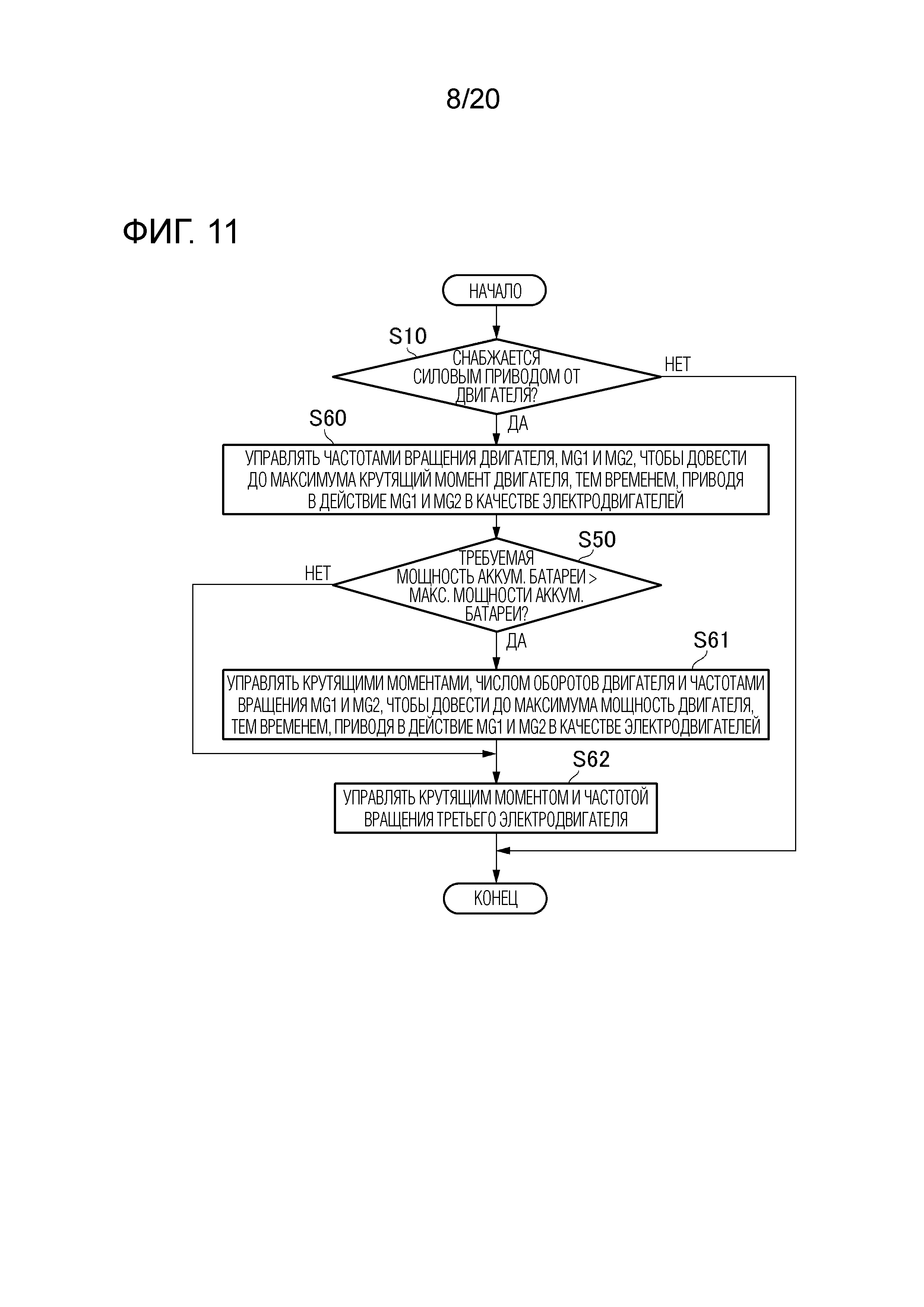
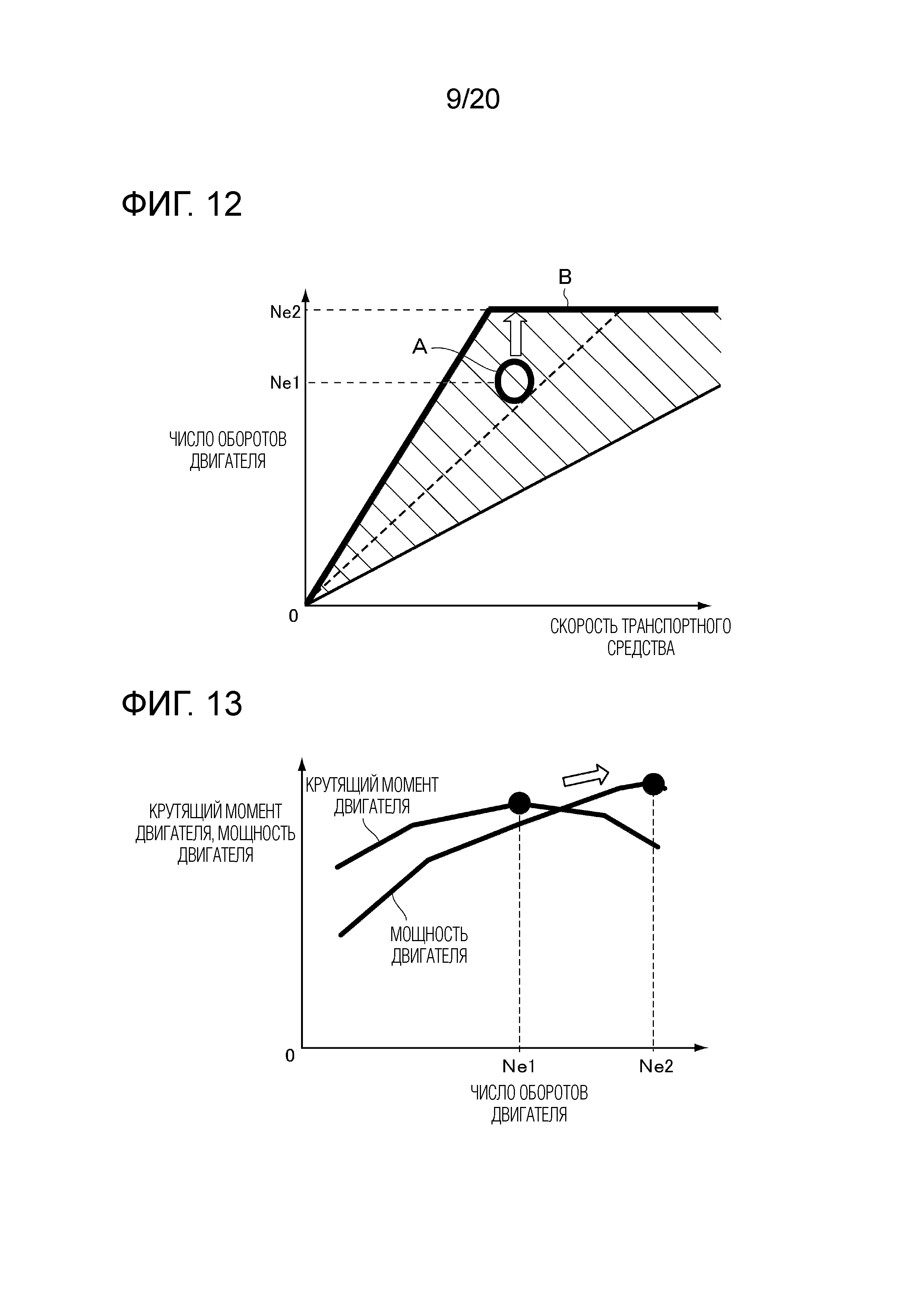
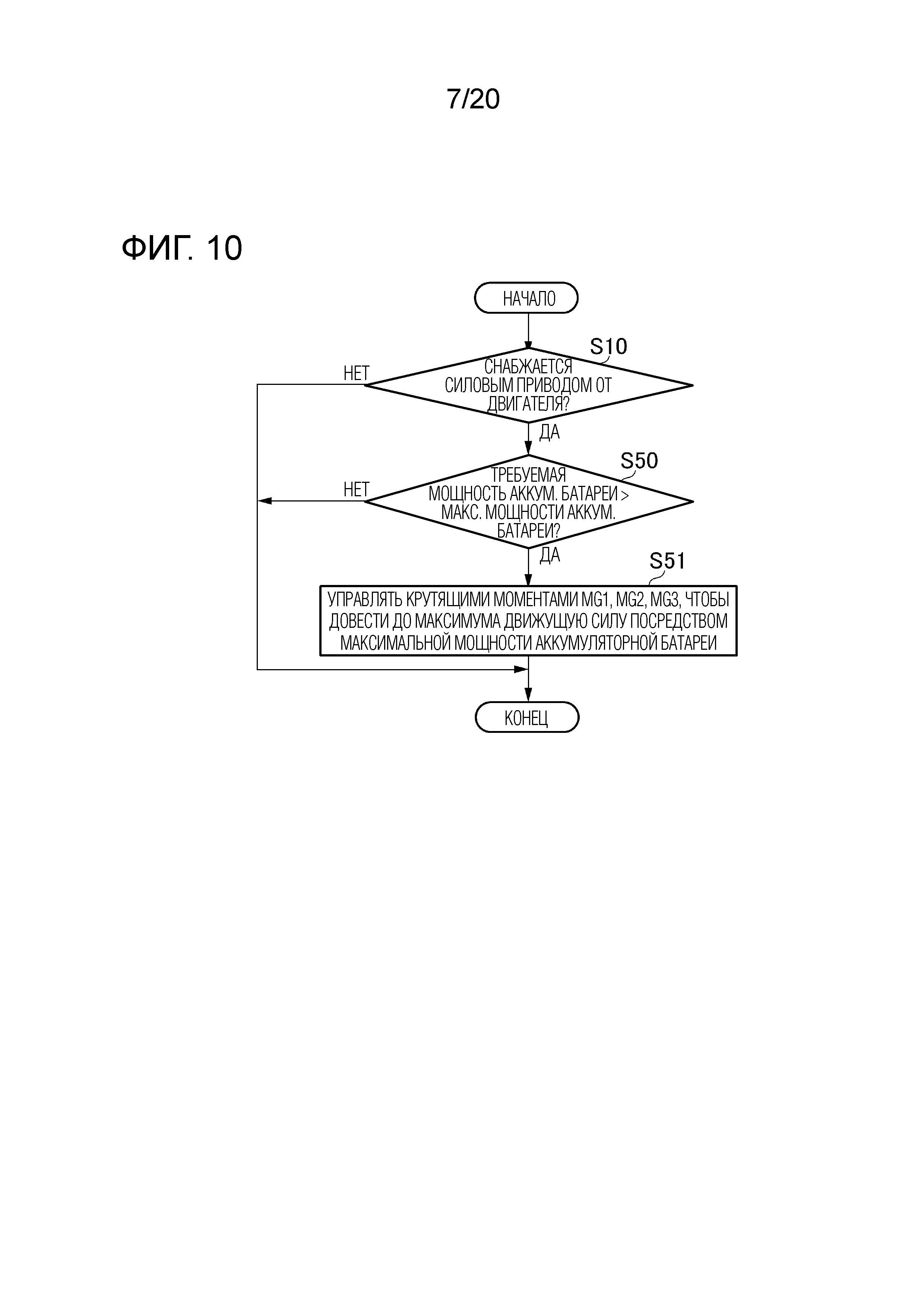
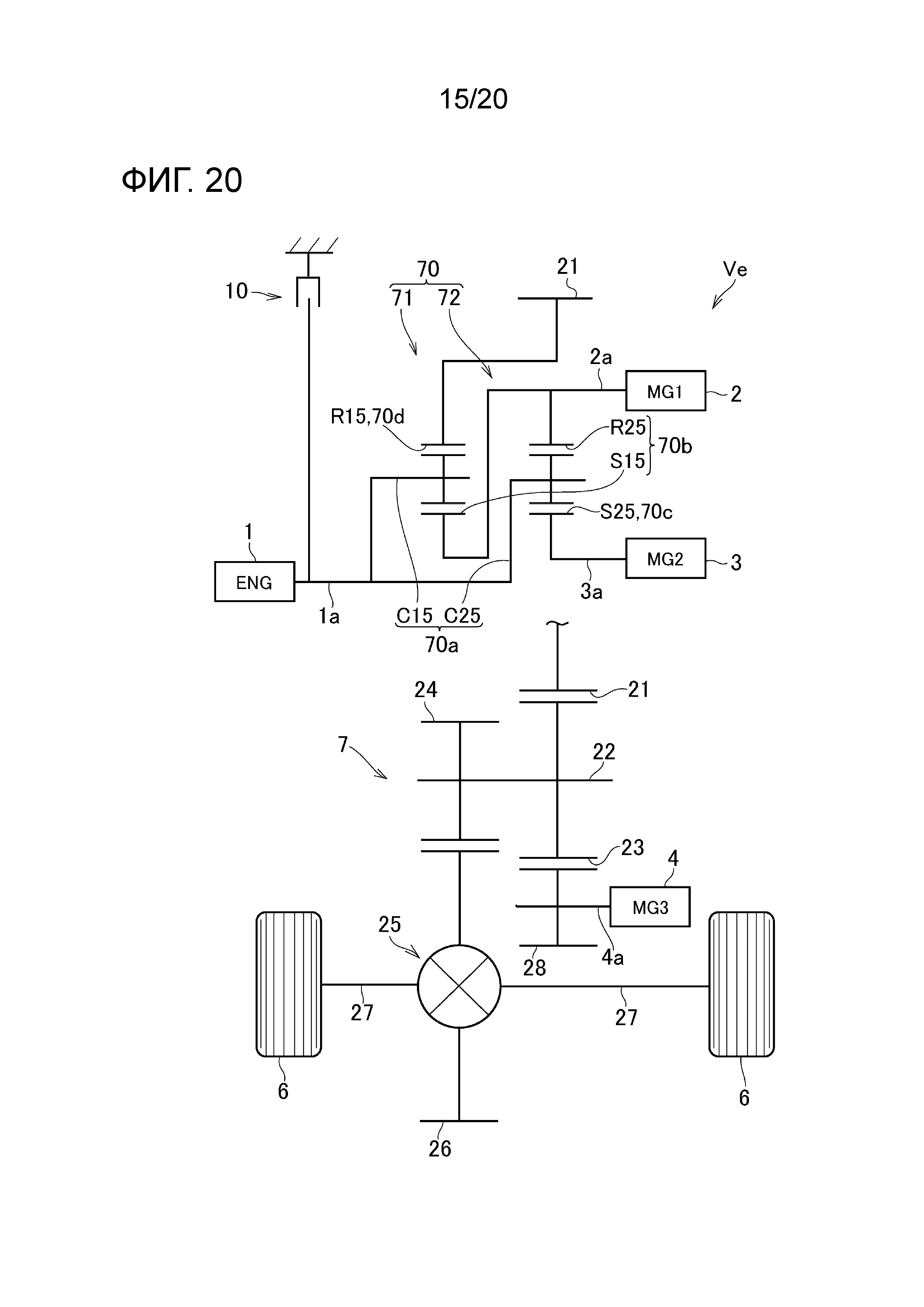
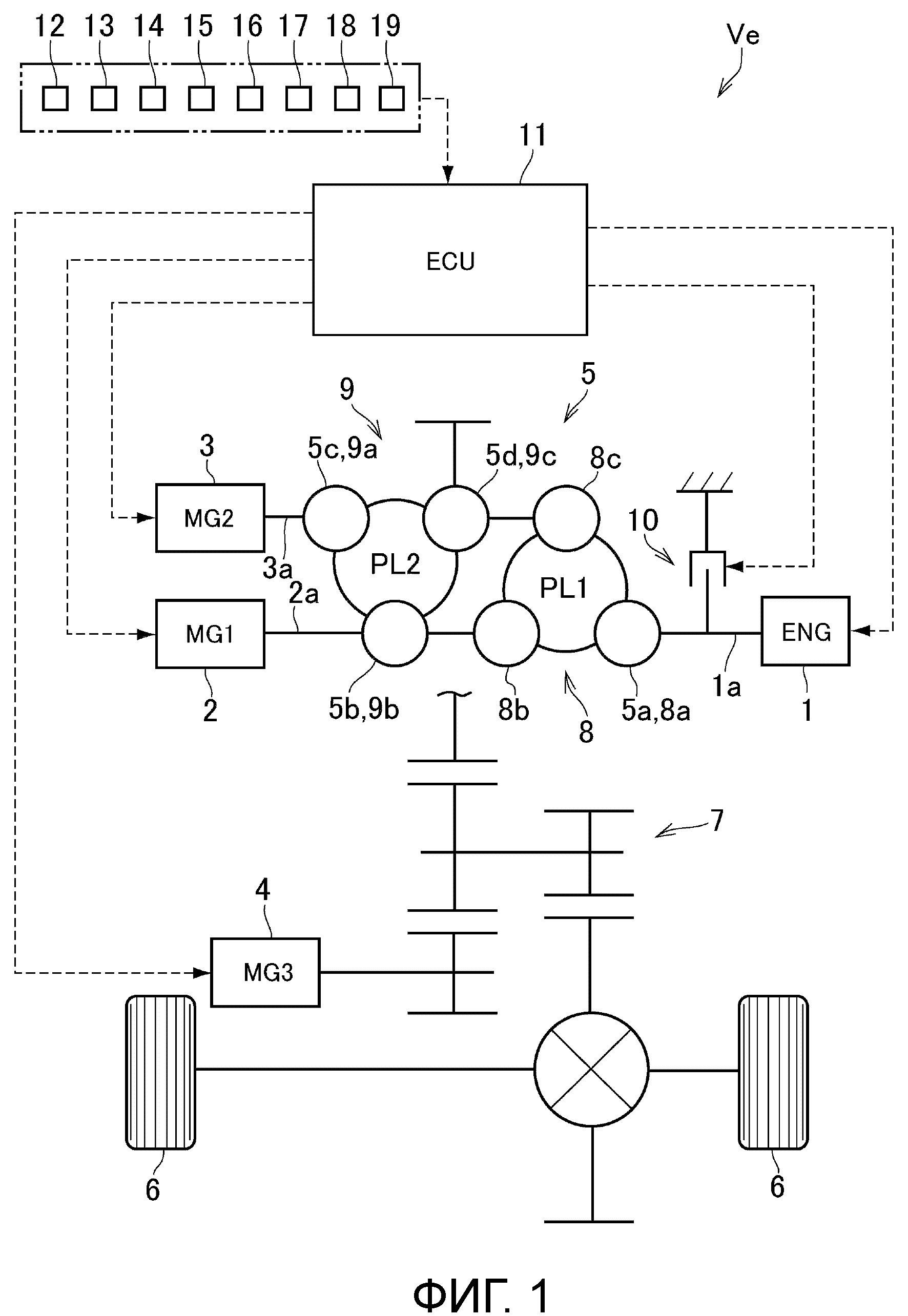
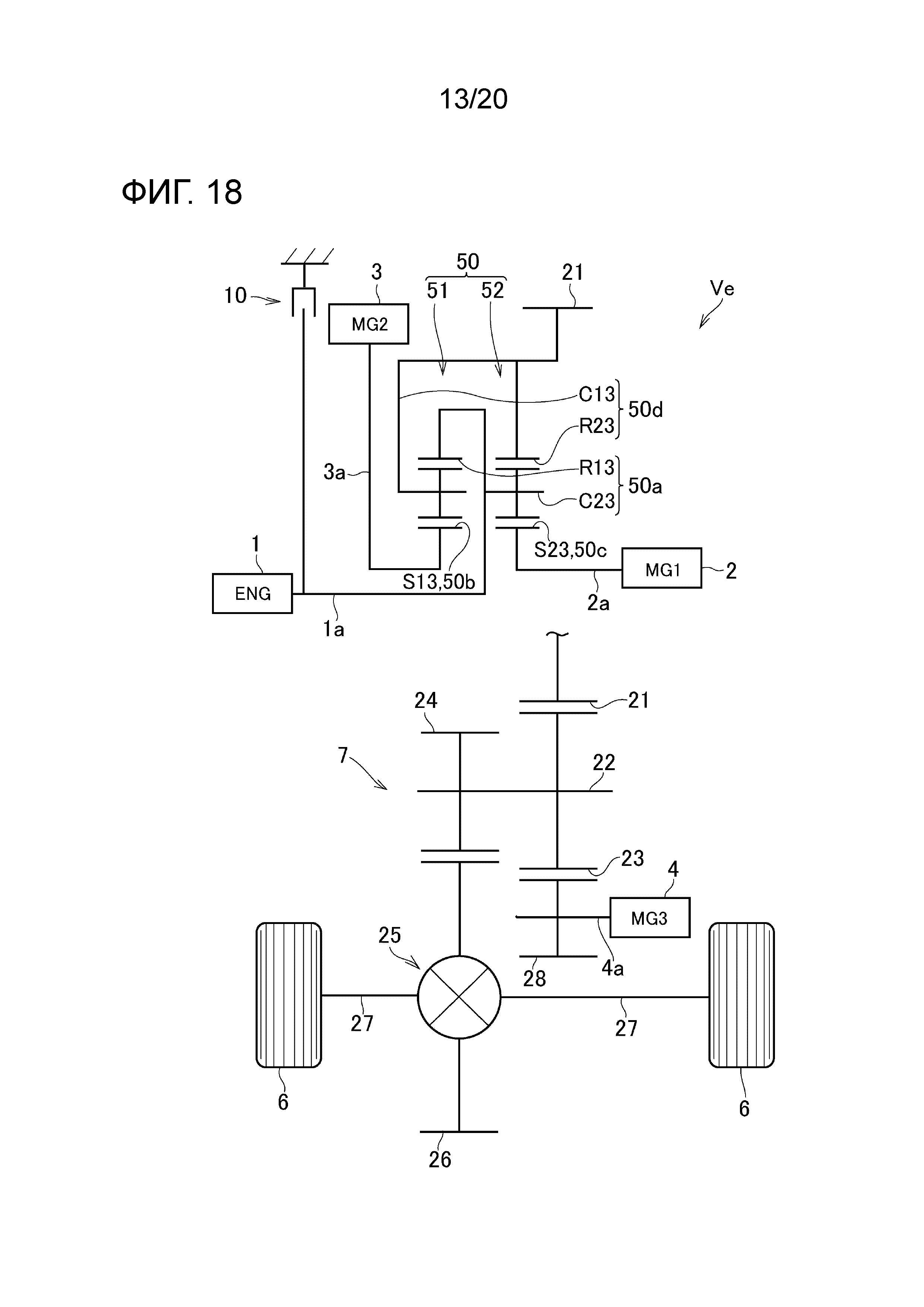
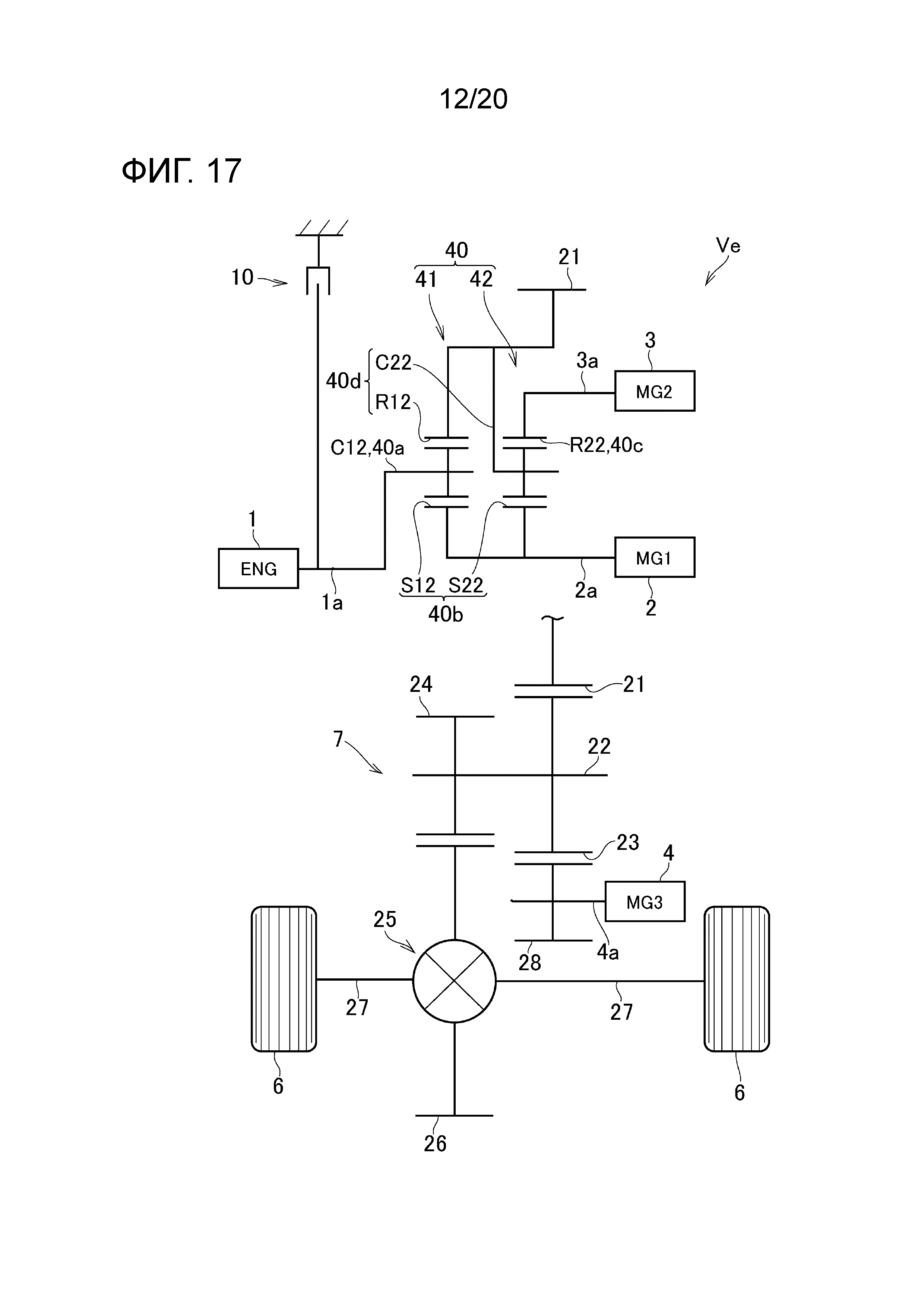
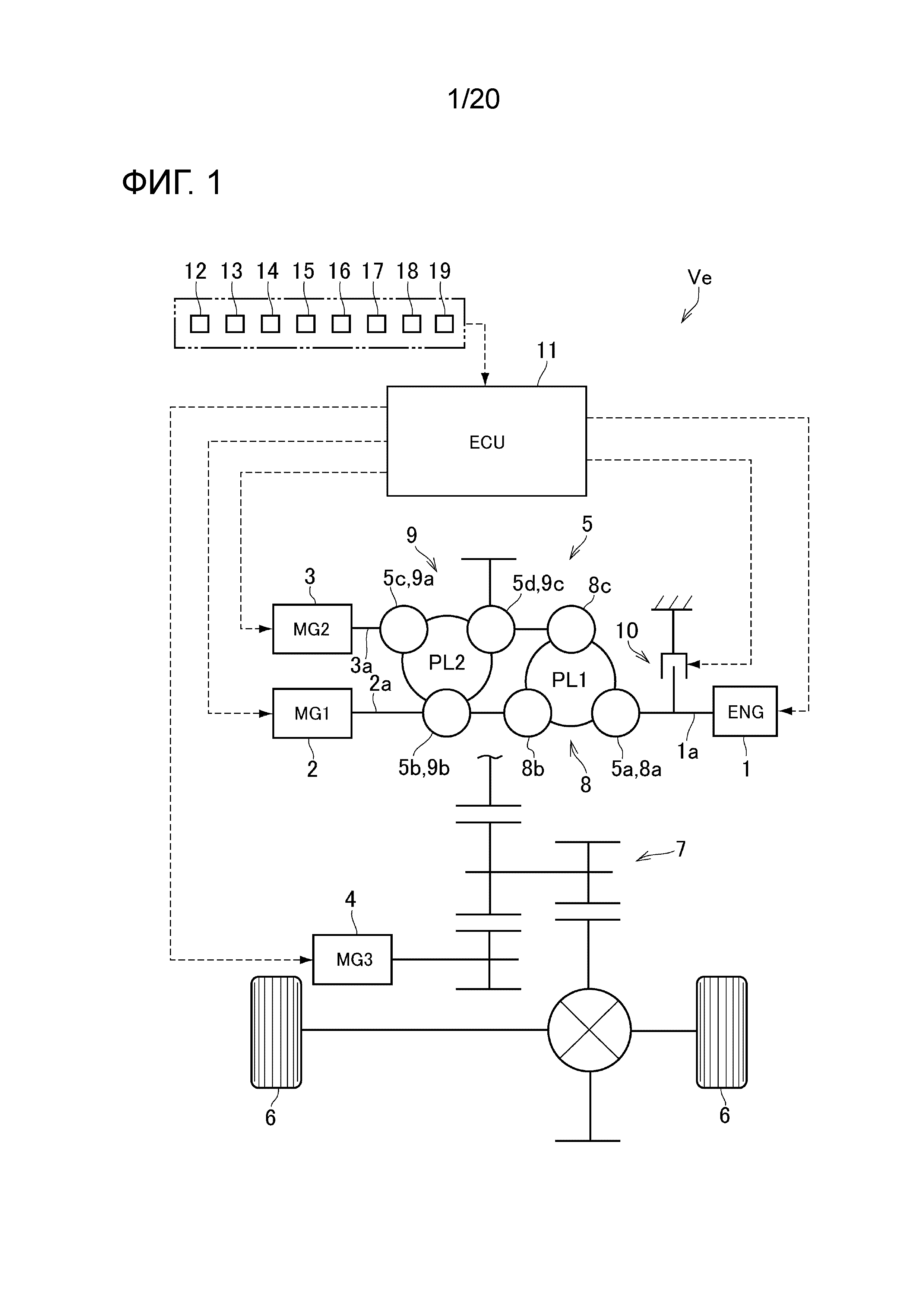
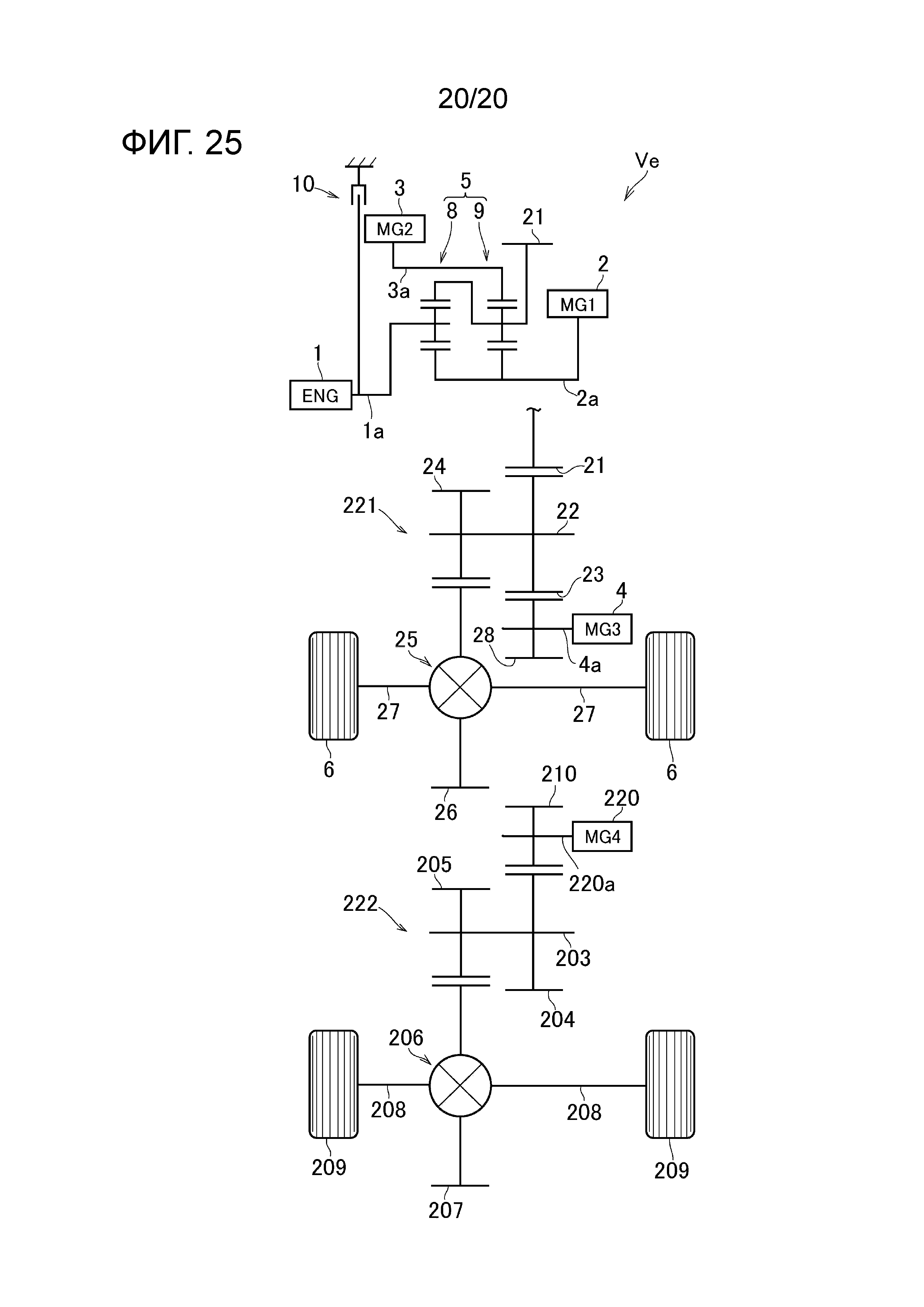
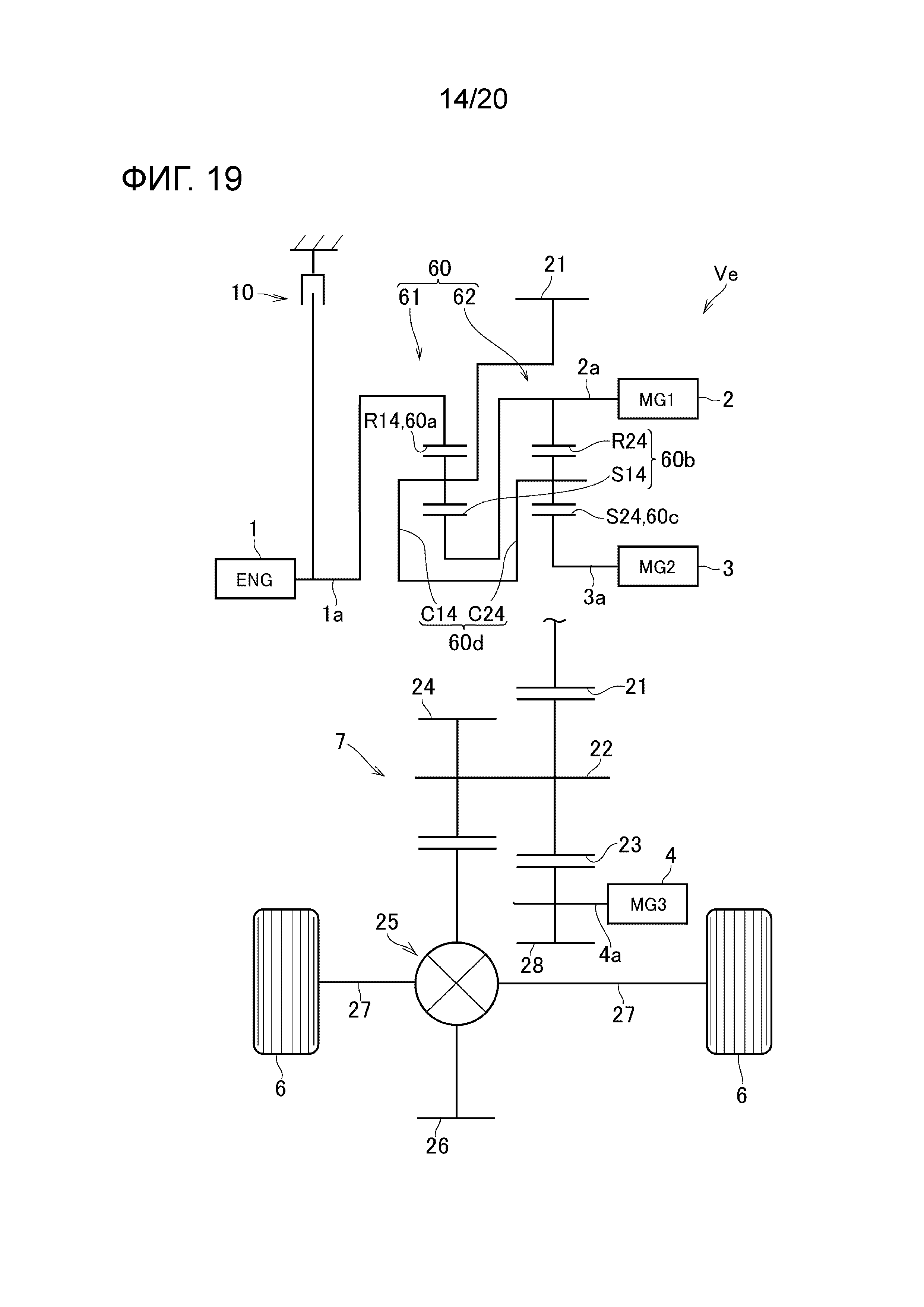
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство дифференциала
Система привода для транспортного средства
Система управления приводом для гибридного транспортного средства
Система управления приводом для гибридного транспортного средства
Гибридное транспортное средство
Система привода для гибридного транспортного средства
Устройство управления и способ управления для транспортного средства
Система управления для гибридного транспортного средства, гибридное транспортное средство и способ управления для гибридного транспортного средства
Модуль привода для гибридного транспортного средства
Приводное устройство для гибридного транспортного средства

