Интеллектуальный робот для настольного тенниса
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к тренажерам подготовки спортсменов играющих в настольный теннис
Уровень техники
Известны устройства тренировки спортсменов настольного тенниса которые (устройства) позволяют им (спортсменам) имитировать игру в настольный теннис без участия живого партнера при этом спортсмены могут получить от робота подающего мячик подачу как со строго фиксированными параметрами (подкрутка мяча, скорость удара, его сила, направление и т.д.), так и с параметрами выбираемыми для каждой подачи случайно.
В настоящий момент не смотря на большое разнообразие производителей устройств для тренировки теннисистов их условно можно разделить на несколько групп.
1. Устройства подачи мячей напольного исполнения (фиг. 1). В данных устройствах резервуар с мячами располагается непосредственно на полу. При этом высота вылета мяча по сравнению с уровнем стола (поз 1, фиг. 1) не регулируется или же регулируется единоразово, перед запуском режима работы.
2. Устройства подачи мячей настольного исполнения (фиг. 2). В данных устройствах, более мобильных по сравнению с предыдущим пунктом и потому более легко перемещаемыми по необходимости в другое помещение или же на другой теннисный стол, и резервуар для мячей и непосредственно само окончание устройство осуществляющее подачу мяча выполнены в едином корпусе.
Не смотря на различия в исполнении данных устройств можно выделить следующее:
1. При любом (настольном или напольном) исполнении устройства привязаны к краю теннисного стола.
2. При любом (настольном или напольном) исполнении устройства головка выкидывающая мячик находится на жестко фиксированной высоте над поверхностью теннисного стола.
3. При любом (настольном или напольном) исполнении устройства мячи выбрасываются по строго заданной программе либо со случайно выбранными параметрами (скорость, сила выброса, вращение), но при этом совершенно не учитывается местоположение спортсмена.
4. При любом (настольном или напольном) исполнении устройства присутствует проводной или беспроводной пульт управления который входит в комплект устройства, непосредственно к нему привязан, увеличивает стоимость устройства в целом и обуславливает зависимость устройства от работоспособности или же даже просто наличия данного пульта управления.
Данные недостатки обуславливают относительную предсказуемость выброса мяча и соответственно снижает степень подготовки спортсмена к конкретной игре.
Раскрытие изобретения
Задачей изобретения является создание устройства подачи теннисного мяча которое способно на ряду с обычным режимом тренировки, которая предусматривает отработку действий спортсмена в стандартных ситуациях возникающих по всей поверхности игрового стола, в режиме полной автономности (в зависимости от местонахождения спортсмена) принимать решение о направлении подачи мяча, ее силе, степени подкрутки мяча, амплитуде отскока, области попадания мяча на стороне спортсмена.
Для этого конструкцией устройства предусмотрена как программная возможность анализировать местоположение спортсмена, так и аппаратная возможность динамически изменять высоту подающего окончания устройства по отношению к поверхности игрового стола. Соответственно устройство подачи теннисных мячей, именуемое далее теннисный робот, не меняя режима тренировки может изменять амплитуду отскока теннисного мяча или же область его падения на стороне спортсмена.
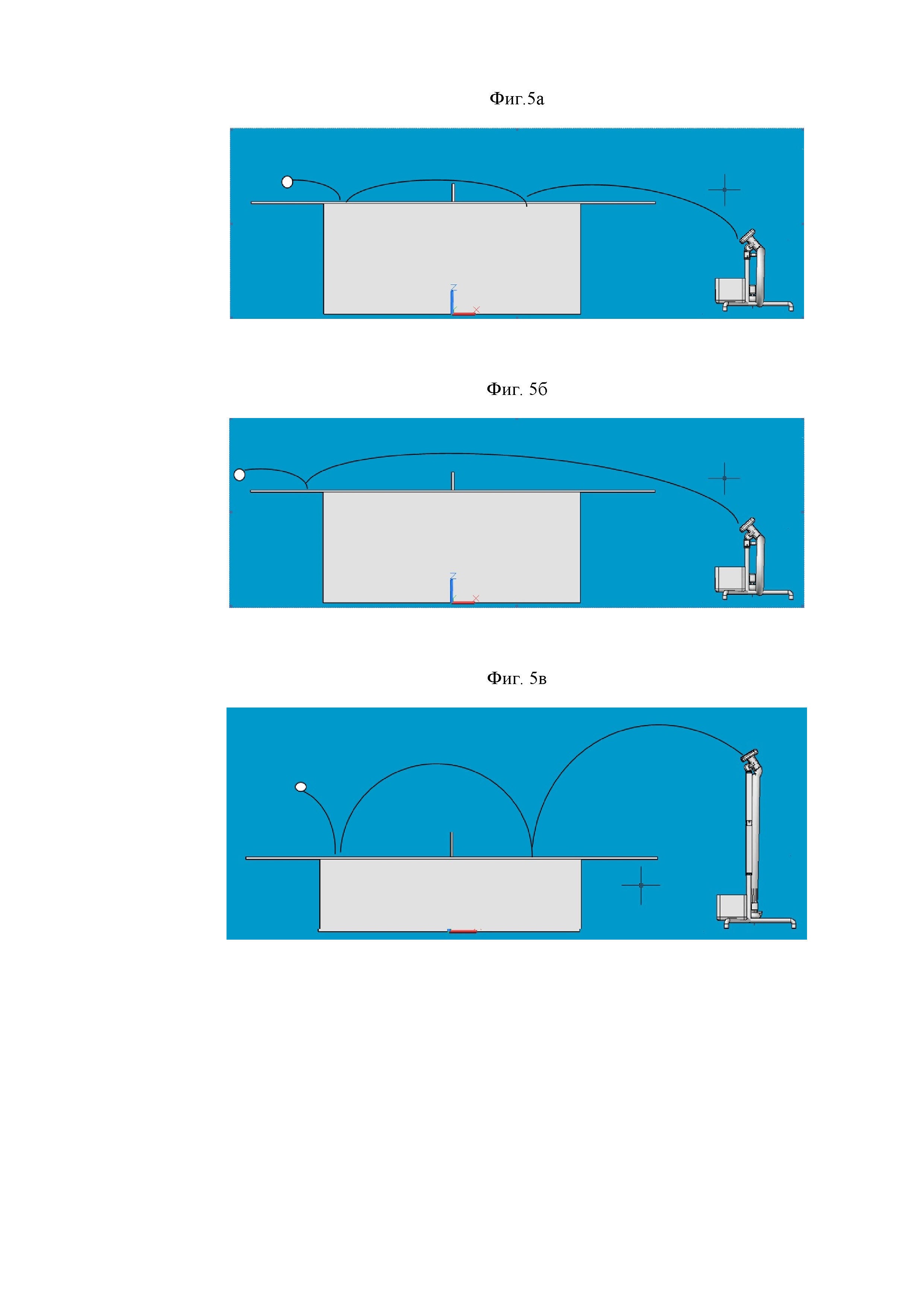
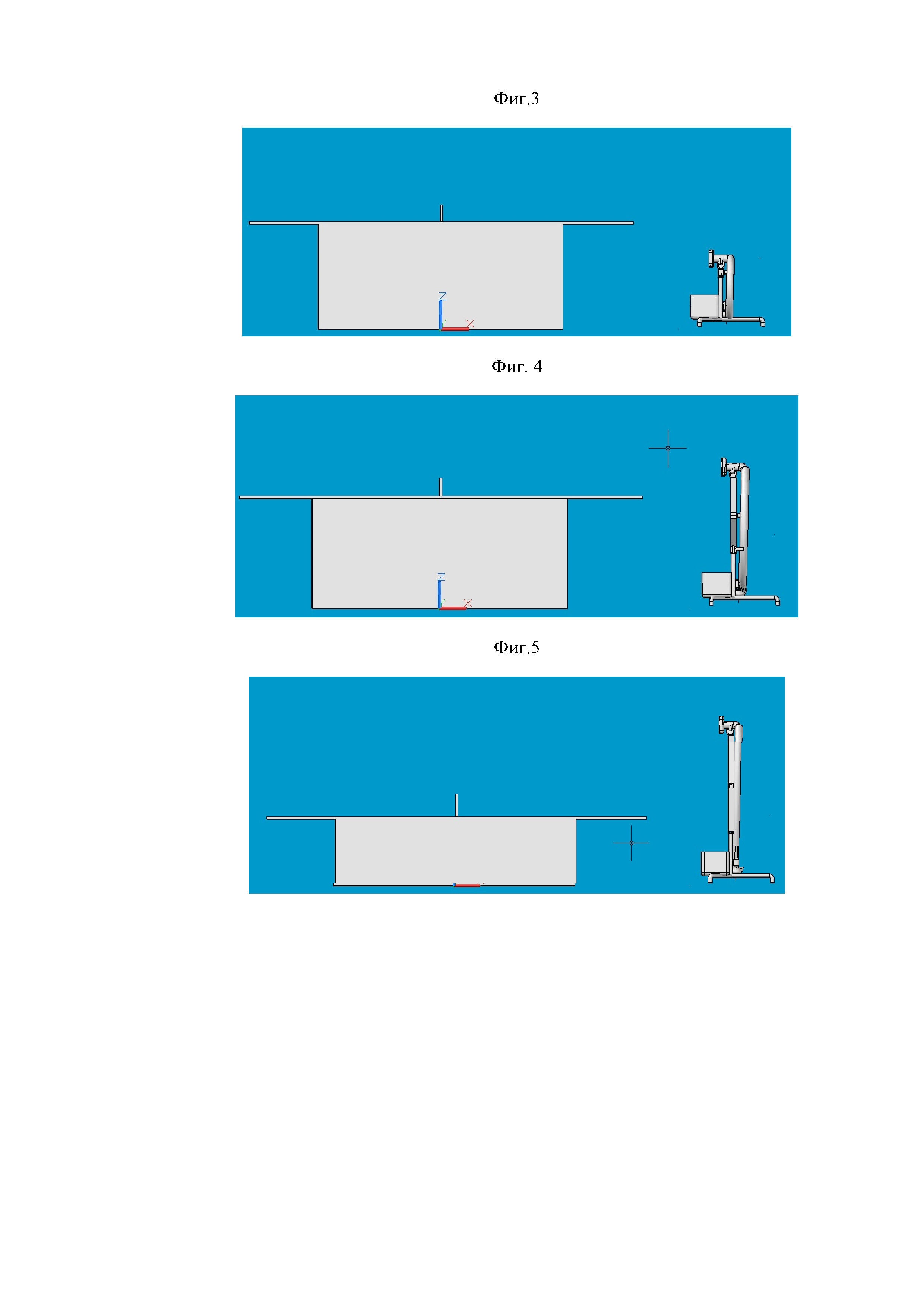
Данная возможность делает возможным производить подачи теннисного мяча с точки расположенной как ниже уровня теннисного стола (фиг.3) или на стандартном для всех теннисных роботов уровне – на уровне стола (фиг. 4), так и выше стандартной высоты (фиг. 5), что в принципе отличает предлагаемое устройство подачи теннисных мячей от ныне существующих решений. Также учитывая то что в конструкции подающего окончания робота предусмотрена возможность изменять угол наклона появляется возможность осуществления подач и ударов теннисного мяча отсутствующих у обычных роботов. В прилагаемых чертежах показаны возможные варианты: подача теннисного мяча из-под стола (фиг. 5а), удар из-под стола (фиг. 5б), подача с высокой амплитудой отскока (фиг. 5в), удар с высокой амплитудой отскока (фиг. 5г).
Для реализации задачи изобретения в конструкцию устройства включены датчики анализа местоположения спортсмена которое перед выбросом оценивает зону его нахождения относительно игрового стола, удаленность его от стола и принимает решение о направленности подачи, ее силе, подкрутке мяча, т.е. приближало бы в процессе тренировки (в режиме автономной игры) ситуацию максимально близко к реальной игре.
Описание чертежей
К данному описанию приложены чертежи на которых последовательно изображены:
Фиг.1 – устройство подачи мячей для настольного тенниса напольного исполнения.
Фиг.2 – устройство подачи мячей для настольного тенниса настольного исполнения.
Фиг.3 – нижнее положение подающего окончания робота
Фиг.4 – среднее положение подающего окончания робота
Фиг.5 – верхнее положение подающего окончания робота
Фиг.5а – подача теннисного мяча роботом «из-под» стола
Фиг.5б – удар «из-под» стола
Фиг.5в – подача роботом теннисного мяча с высокой амплитудой отскока
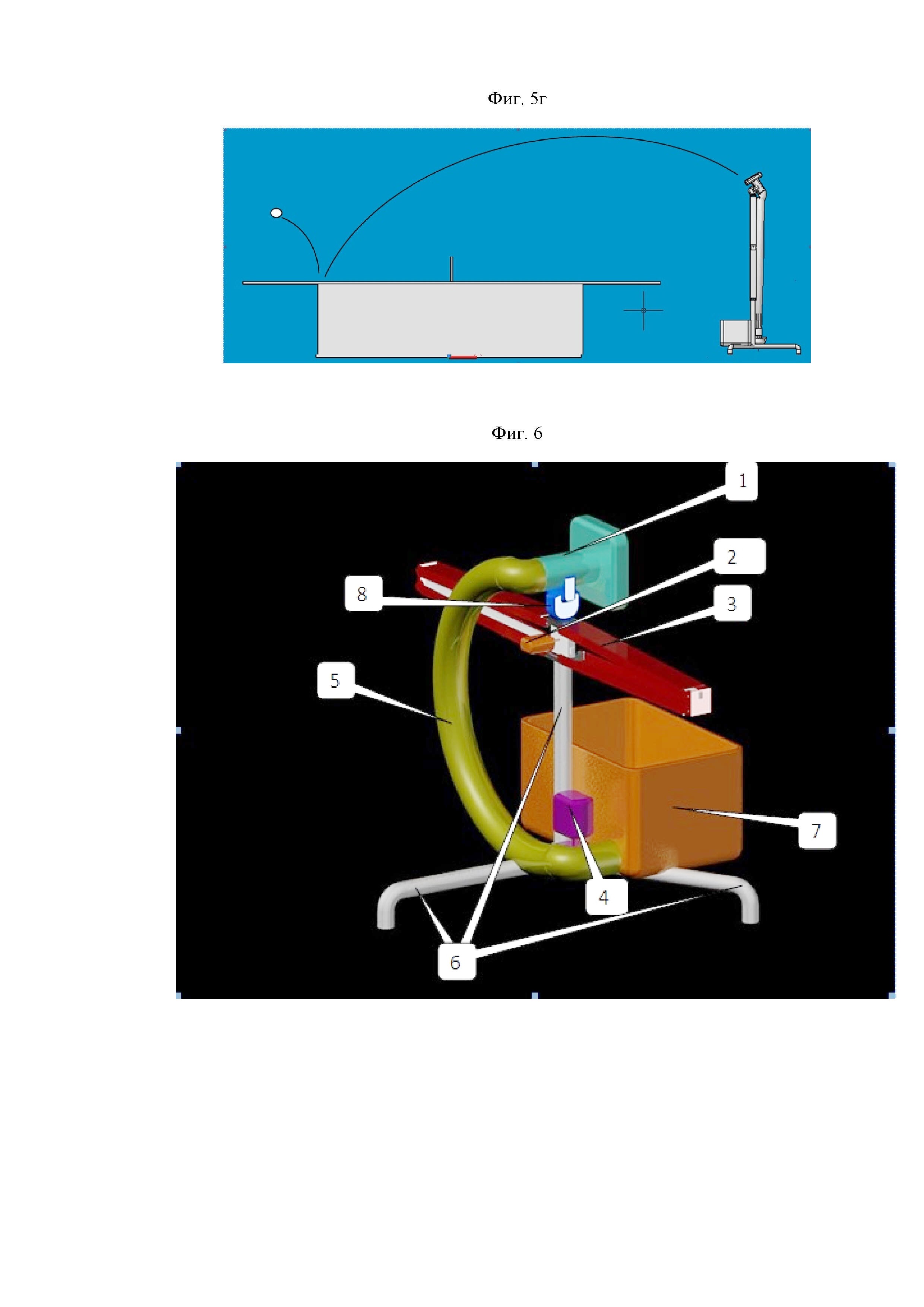
Фиг.5г – удар с высокой амплитудой отскока
Фиг.6 – поблочное устройство робота
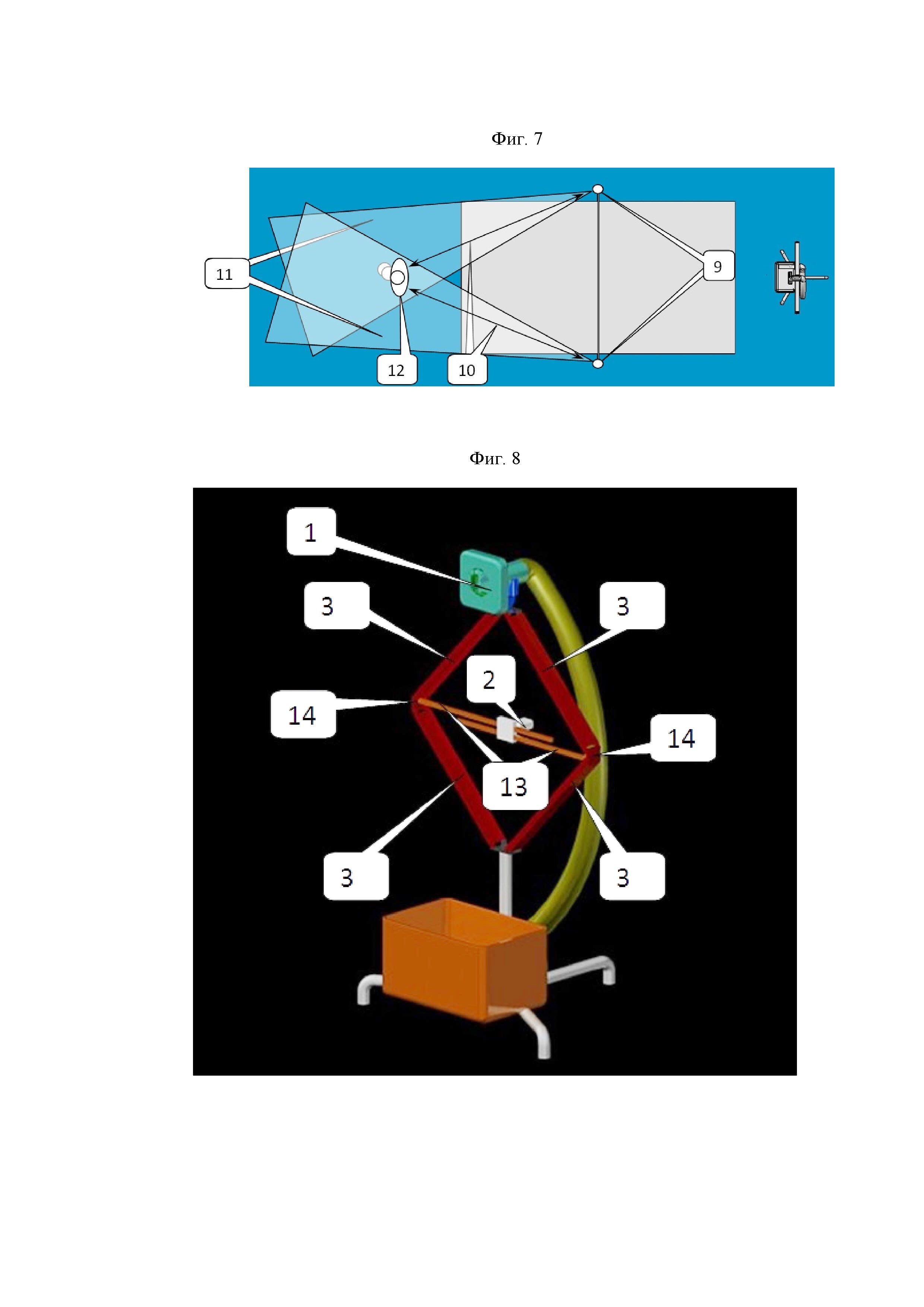
Фиг.7 – организация контроля местоположения спортсмена за теннисным столом
Фиг.8 – поблочное устройство высотообразующего механизма робота
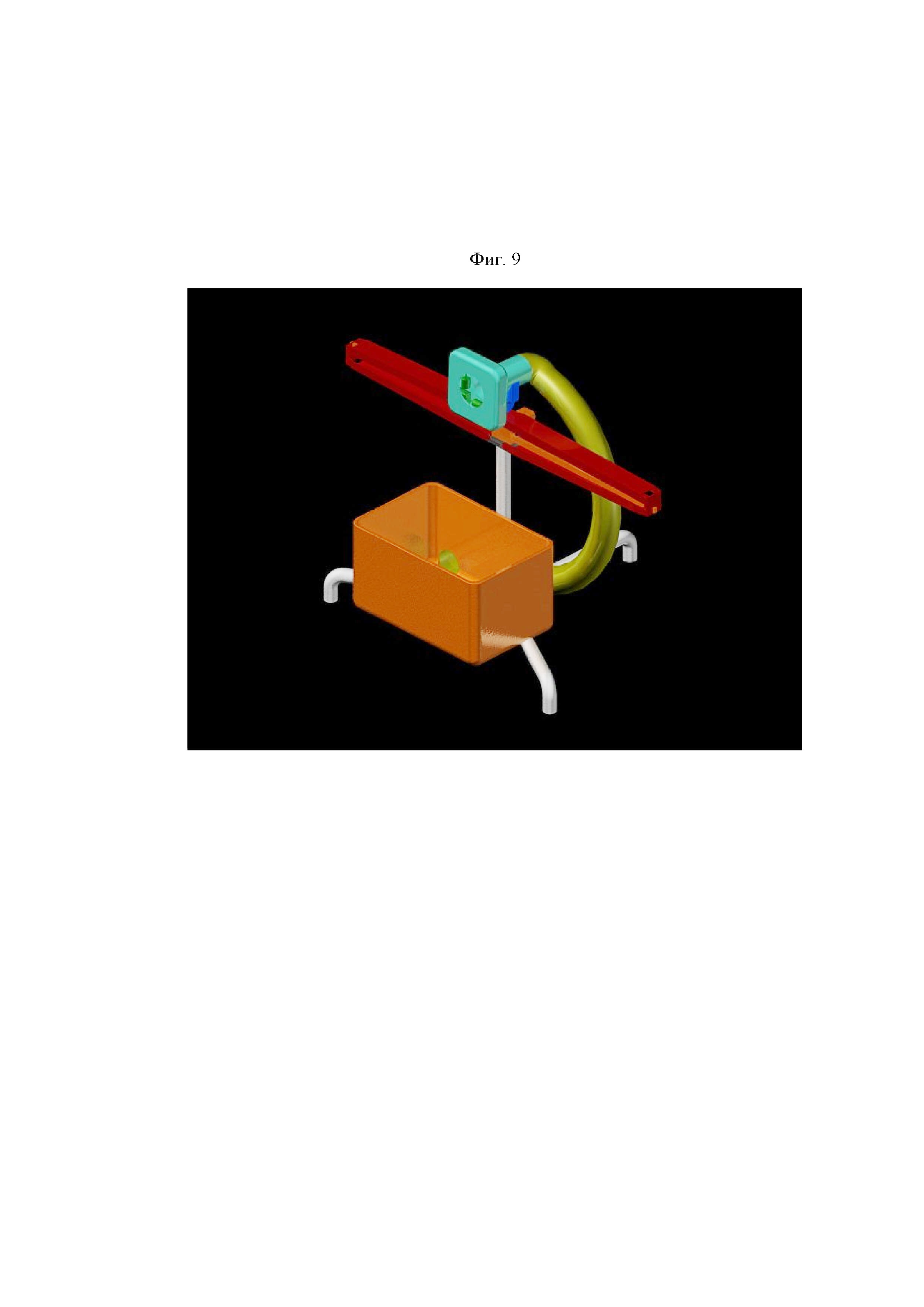
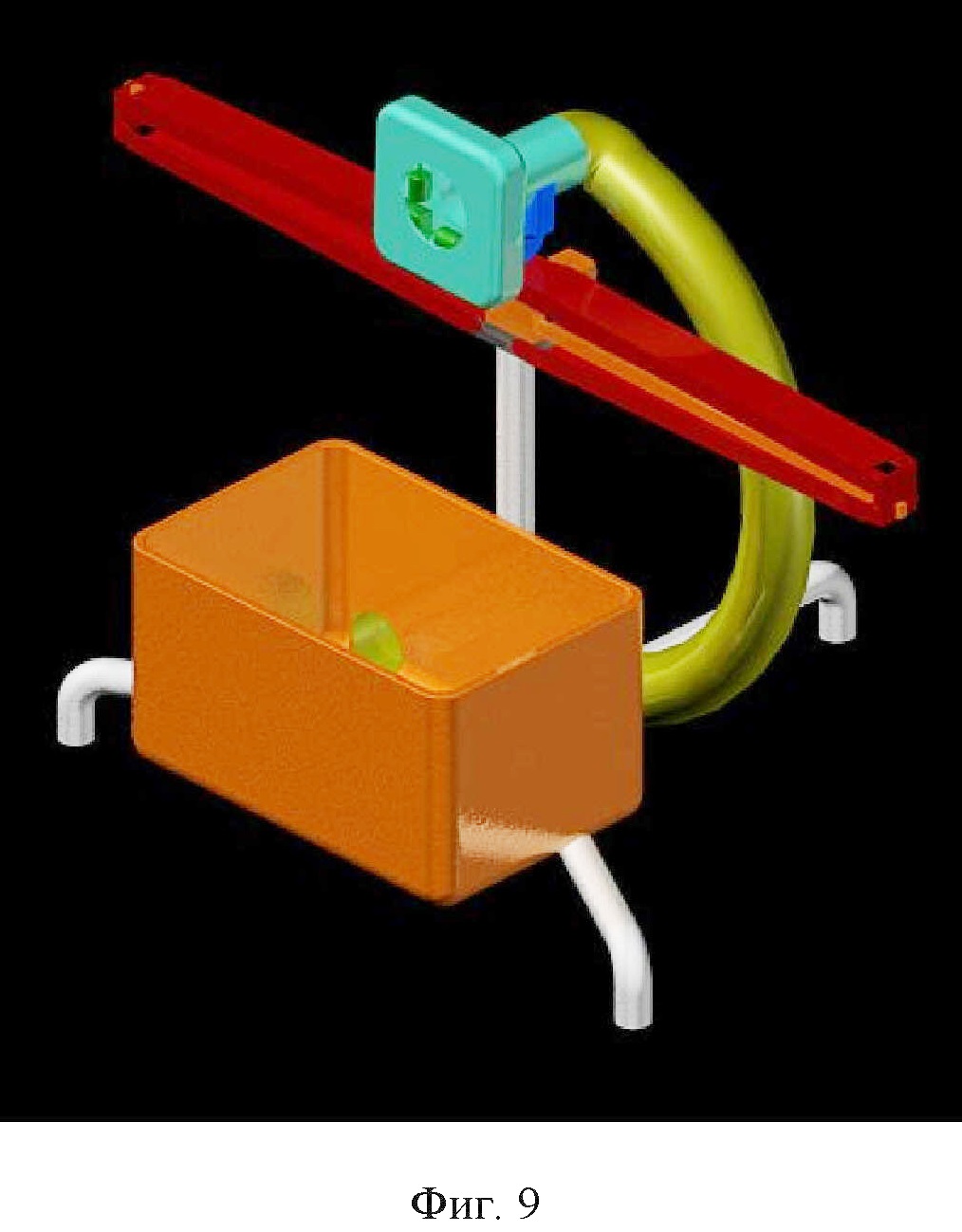
Фиг.9 – робот в минимальном по высоте положении
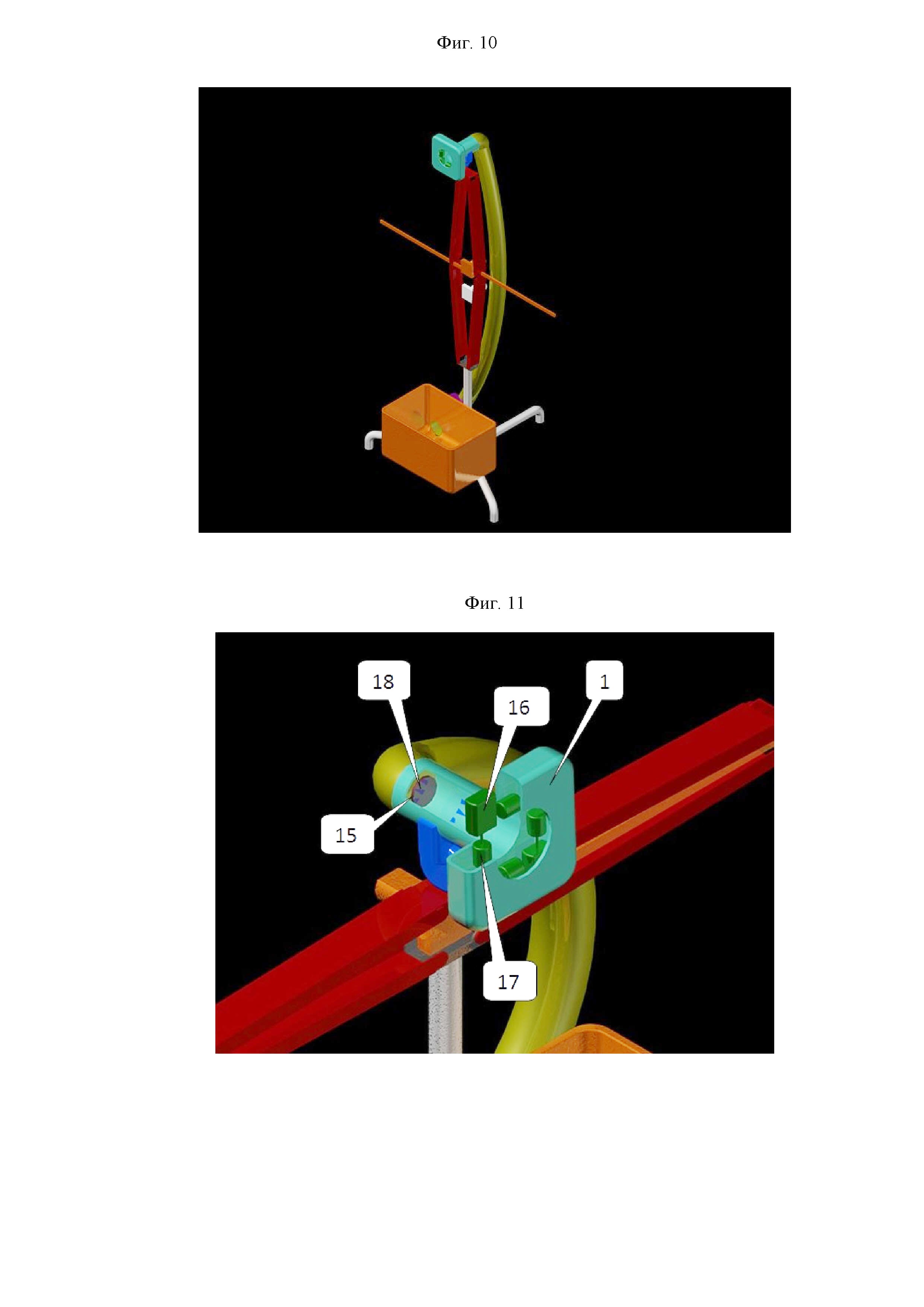
Фиг.10 – робот в максимальном по высоте положении
Фиг.11 – поблочное устройство подающей головки
Осуществление изобретения
Предлагаемое устройство представляет собой аппаратно-программный комплекс и состоит из следующих частей:
1. Аппаратная часть
2. Программная часть
Аппаратная часть предусматривает собой подающую головку выбрасывающую теннисные мячи (поз 1, фиг. 6, далее в тексте – подающая головка), механизм изменения высоты подающей головки (поз 2, фиг. 6, далее в тексте – высотообразующий механизм), рычаги изменения высоты подающей головки (поз 3, фиг. 6), механизм подающий теннисные мячи к подающей головке (поз 4, фиг. 6, далее в тексте – шарикоподающий механизм), гибкий трубопровод подачи теннисных мячей к подающей головке (поз. 5, фиг. 6, далее в тексте - шарикопровод), стойка с наземными упорами (поз 6, фиг. 6, далее в тексте - стойка), емкость для теннисных шариков (поз. 7, фиг. 6) программный блок располагаемый отдельно от устройства (на чертеже не обозначен), механизм управления наклона подающей головы в горизонтальной и вертикальной плоскости (поз.8, фиг.6, далее в тексте – управляющий механизм), датчики анализа местоположения спортсмена (поз. 9, фиг. 9).
Программная часть предусматривает собой микроконтроллер с оперативной памятью и записанные в него алгоритмы работы устройства в следующих режимах:
1. отработка ударов по теннисному мячу с параметрами не изменяемых в течение периода тренировки без учета местоположения спортсмена,
2. отработка ударов по теннисному мячу с параметрами (сила удара, направление подачи, направление подкрутки) изменяющихся в процессе тренировки случайно без учета местоположения спортсмена,
3. отработка ударов по теннисному мячу с параметрами (сила удара, направление подачи, направление подкрутки) изменяемыми в течение периода тренировки в зависимости от местоположения спортсмена,
4. отработка ударов по теннисному мячу с параметрами (сила удара, направление подачи, направление подкрутки) изменяющихся случайно, но с учетом местоположения спортсмена,
5. отработка ударов по теннисному мячу с параметрами (сила удара, направление подачи, направление подкрутки) настраевыми для каждого удара на весь цикл тренировки перед его началом.
Программная часть робота предусматривает возможность применения программного обеспечения открытого для сторонних разработчиков, которое позволит оконечным пользователям робота писать алгоритмы работы устройства индивидуально.
Дополнительным отличием устройства предлагаемым к патентованию данным заявлением является отсутствие какого либо определенного пульта управления с которого будет осуществляться управление и настройка данного устройства.
В качестве пульта управления может быть использовано любое устройство, таких как например смартофоны, планшетные компьютеры и т.д., на которое можно будет установить управляющую (настраивающую) программу. Связь между устройством с установленной программой и программным блоком будет работать по беспроводным видам связи (Bluetooth, WiFi и т.д.).
Работа устройства в вариантах использования для отработки ударов без анализа положения спортсмена относительно теннисного стола организована следующим образом:
Спортсмен, либо другой человек, со своего мобильного устройства подключенного к программному блоку подающего устройства по беспроводным видам связи (Bluetooth, WiFi и др.), в дальнейшем именуемый как пульт управления, выбирает режим работы робота, и включает его.
Программный модуль робота задает для подающей головки параметры выброса теннисного мяча (сила выброса, направление выброса, подкрутка мяча, высоту подающей головки относительно поверхности теннисного стола), путем активирования высотообразующего механизма выставляет необходимую для подачи высоту подающей головки.
После настройки параметров подающей головки программный модуль теннисного робота задействуя шарикоподающий механизм, по шарикопроводу обеспечивает поставку теннисного мяча в подающую головку для осуществления подачи.
После осуществления подачи (выброса) теннисного мяча из подающей головки программный модуль проверяет соответствие параметров следующего выброса параметрам заданным спортсменом (сторонним оператором) или же программе заданной перед началом цикла тренировки, в случае необходимости вносит изменения в настройки подающей головки или же (в случае отсутствия необходимости таковых изменений) ничего не меняет, производит доставку теннисного мяча к подающей головке и соответственно – следующий выброс теннисного мяча.
И так – до окончания заданного спортсменом или же другим оператором времени работы теннисного робота.
Работа теннисного робота в режиме отслеживания положения спортсмена отличается от описанного выше только тем, что параметры выброса теннисного мяча выставляются программным модулем теннисного робота в соответствии с положением спортсмена (поз. 12, фиг. 7) относительного теннисного стола которое определяется двумя или более датчиками (поз. 9, фиг. 7) чувствительными к тепловому излучению тела человека находящегося в зоне действия датчиков (поз. 11, фиг. 7), либо использующими для получения данных ультразвуковое или световое излучение.
На основании данных полученных от датчиков (поз. 9, фиг. 7) программный модуль определяет вначале расстояние от каждого датчика (поз. 10, фиг. 7) до местоположения спортсмена. Затем за счет вычислений с использованием данных от датчиков (поз. 9, фиг. 7) происходит определение месторасположения игрока (поз. 12, фиг. 7) по отношению к игровому столу и программный модуль вносит изменения в настройки подающей головки и высотообразующего механизма (либо оставляет их (в соответствии с выбранным режимом работы робота) без изменений и производит выброс мяча.
При этом робот производит выброс мяча и как логически организованный удар в сторону противоположную от местонахождения спортсмена (условно назовем этот режим «предсказуемый»), так и в сторону местонахождения спортсмена (режим условно называемый «непредсказуемый»), что усложняет режим тренировки спортсмена и приближает режим тренировки к реальному спортивному поединку.
Робот имеет рычаговый механизм изменения высоты подающей головки над уровнем теннисного стола который работает следующим образом:
Положение подающей головки (поз. 1, фиг. 8) по отношению к уровню стола устанавливает высотообразующий механизм (поз. 2, фиг. 8) который воздействуя на горизонтальные тяги (поз. 13, фиг. 8) сдвигает-раздвигает рычаги (поз. 3, фиг. 8) в боковых местах их скрепления между собой (поз. 14, фиг. 8). Данные рычаги подымают и опускают подающую головку согласно настроек программного модуля и в результате робот принимает по высоте как минимальное (фиг. 9), так и максимальное (фиг. 10) значение.
Работа подающей головки заключается в следующем:
Подающая головка состоит из толкающего механизма (поз. 15, фиг. 11) расположенного у тыльной стороны подающей головки (поз. 1, фиг. 11), двигателей (поз. 16, фиг. 11) с валиками (поз. 17, фиг. 11) формирующими подкрутку теннисного мяча и проходного канала (поз. 18, фиг. 11) по которому теннисный мячик выбрасывается на теннисный стол.
Толкающий механизм (поз. 15, фиг. 11) с силой определенной настройками спортсмена или стороннего оператора выталкивает теннисный мячик по проходному каналу (поз. 18, фиг. 11), а валики подкрутки (поз. 17, фиг. 11) расположенные на выходе проходного канала (поз. 18, фиг. 11) воздействуют на проходящий через них теннисный мячик и определяют его кручение.
Преимуществом данного варианта подающей головки является отсутствие необходимости вращения самой головки для изменения характера кручения теннисного мяча и соответственно потерь времени на это. Достаточно задать параметры кручения теннисного мячика для каждого колесика подкрутки (либо выключить ненужные) отличные от параметров для предыдущей подачи, что производится за доли секунды.
Устройство автоматической подачи шариков для настольного тенниса, содержащее напольную стойку, емкость для теннисных шаров, закрепленную в нижней части стойки, закрепленную в верхней части устройства подающую головку, имеющую в своей конструкции толкающий механизм и подкручивающие ролики, устройство, устанавливающее подающую головку под нужным в горизонтальной и вертикальной плоскостях углом к поверхности теннисного стола, гибкий трубопровод, соединяющий емкость для шариков и подающую головку и изменяющий свою форму в зависимости от высоты подающей головки, механизм, подающий по трубопроводу шарики из емкости для них в подающую головку, микропроцессор управления, контролирующий работу узлов и механизмов устройства, датчики, отслеживающие положение спортсмена по отношению к теннисному столу и передающие полученные данные в микропроцессор управления, механизм изменения высоты подающей головки по отношению к поверхности теннисного стола, отличающееся тем, что высота подающей головки по отношению к поверхности теннисного стола динамически изменяется в процессе работы устройства в зависимости от программы микроконтроллера без общей остановки и перенастроек микропроцессора, а также тем, что высота подающей головки над уровнем стола, наклон по отношению к поверхности стола как в вертикальной, так и горизонтальной плоскости микропроцессором настраиваются на основе данных, полученных от датчиков отслеживания.