Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ ВИБРАЦИОННОГО ГИРОСКОПА
Вид РИД
Изобретение
[0001] Настоящее изобретение относится к вибрационному гироскопу. В частности, настоящее изобретение относится к способу калибровки вибрационного гироскопа.
[0002] Гироскоп представляет собой устройство, которое может использоваться для того, чтобы измерять скорость углового вращения. Измерения скорости углового вращения могут быть интегрированы во времени, чтобы определять изменение угловой ориентации гироскопа. Если начальная ориентация гироскопа известна, то определение изменения угловой ориентации гироскопа может использоваться для того, чтобы извлекать ориентацию гироскопа во время после изменения угловой ориентации. Гироскоп, например, может использоваться в таких вариантах применения, как инерциальные навигационные системы (INS), стабилизация наземных транспортных средств, самолетов, судов и/или другие варианты применения.
[0003] Вибрационный гироскоп представляет собой тип гироскопа, в котором резонансная структура принудительно вибрирует. Вибрационный гироскоп может упоминаться в качестве вибрационного структурного гироскопа и/или кориолисова вибрационного гироскопа (CVG). Широкий спектр резонансных структур может использоваться для того, чтобы формировать вибрационный гироскоп, в том числе кольца, цилиндры, полусферы, камертоны и лучи. Вибрационные гироскопы имеют множество преимуществ по сравнению с традиционными гироскопами (на основе вращающейся массы) и по сравнению с гироскопами на основе волоконно-оптических и/или других оптических технологий. Например, вибрационные гироскопы могут быть более дешевыми, чем волоконно-оптические гироскопы, и могут быть более компактными и включать в себя меньшее число частей, чем гироскопы на основе вращающейся массы.
[0004] Для точного измерения скорости углового вращения посредством вибрационного гироскопа, он должен калиброваться. Задача настоящего изобретения заключается в том, чтобы исключать или уменьшать недостаток, ассоциированный с известными способами калибровки.
Сущность изобретения
[0005] Согласно первому аспекту, предусмотрен способ калибровки вибрационного гироскопа, содержащий возбуждение вибрации вдоль оси возбуждения резонансной структуры, при этом ось возбуждения позиционируется в первой угловой позиции, считывание вибрации резонансной структуры на первой оси считывания резонансной структуры в то время, когда ось возбуждения позиционируется в первой угловой позиции, формирование первого сигнала считывания, указывающего считываемую вибрацию резонансной структуры на первой оси считывания, непрерывное вращение оси возбуждения вокруг резонансной структуры во вторую угловую позицию, считывание вибрации резонансной структуры на второй оси считывания резонансной структуры в то время, когда ось возбуждения позиционируется во второй угловой позиции, формирование второго сигнала считывания, указывающего считываемую вибрацию резонансной структуры на второй оси считывания, и суммирование первого сигнала считывания со вторым сигналом считывания, чтобы извлекать смещение гироскопа.
[0006] Способ обеспечивает возможность калибровки гироскопа при одновременном определении угловой скорости гироскопа. Угловая скорость гироскопа может непрерывно отслеживаться в то время, когда гироскоп калибруется. Это преимущественно обеспечивает возможность калибровки гироскопа в ходе использования без значительного прерывания в измерении угловой скорости гироскопа. Это, например, может исключать необходимость предоставлять несколько гироскопов, которые измеряют идентичную угловую скорость.
[0007] Первая угловая позиция оси возбуждения может быть отделена от второй угловой позиции оси возбуждения приблизительно на 45°.
[0008] Первая ось считывания может быть выровнена под углом приблизительно в 45° относительно первой угловой позиции оси возбуждения.
[0009] Вторая ось считывания может быть выровнена под углом приблизительно в 45° относительно второй угловой позиции оси возбуждения.
[0010] Способ дополнительно может содержать определение угловой скорости гироскопа в то время, когда ось возбуждения вращается.
[0011] Угловая скорость гироскопа может определяться из первого сигнала считывания и второго сигнала считывания.
[0012] Определенная угловая скорость гироскопа может использоваться для того, чтобы определять смещение гироскопа.
[0013] Способ дополнительно может содержать определение коэффициента масштабирования гироскопа.
[0014] Определенный коэффициент масштабирования может использоваться для того, чтобы определять смещение гироскопа.
[0015] Определение коэффициента масштабирования может содержать вращение оси возбуждения в первом направлении и на первой скорости в направлении к угловой позиции, считывание вибрации резонансной структуры на оси считывания в первое время непосредственно перед тем, как ось возбуждения достигает угловой позиции, и формирование первого сигнала считывания коэффициентов масштабирования, указывающего считываемую вибрацию, вращение оси возбуждения в направлении от угловой позиции на первой скорости и во втором направлении, противоположном первому направлению, считывание вибрации резонансной структуры на оси считывания во второе время сразу после того, как ось возбуждения уходит из угловой позиции, и формирование второго сигнала считывания коэффициентов масштабирования, который указывает считываемую вибрацию, и вычисление разности между первым и вторым сигналами считывания коэффициентов масштабирования для того, чтобы извлекать коэффициент масштабирования гироскопа.
[0016] Ось считывания может быть отделена от угловой позиции приблизительно на 45°.
[0017] Разность между первым временем и вторым временем может составлять менее приблизительно 50 миллисекунд.
[0018] Согласно второму аспекту, предусмотрен гироскоп, содержащий резонансную структуру, первую и вторую пару исполнительных механизмов (актуаторов), выполненных с возможностью возбуждать вибрацию вдоль оси возбуждения резонансной структуры, причем первая и вторая пара исполнительных механизмов выполнены с возможностью непрерывно вращать ось возбуждения между первой угловой позицией и второй угловой позицией, первую пару датчиков, выполненных с возможностью считывать вибрацию резонансной структуры вдоль первой оси считывания в то время, когда ось возбуждения находится в первой угловой позиции, и формировать первый сигнал считывания, указывающий считываемую вибрацию, вторую пару датчиков, выполненных с возможностью считывать вибрацию резонансной структуры вдоль второй оси считывания в то время, когда ось возбуждения находится во второй угловой позиции, и формировать второй сигнал считывания, указывающий считываемую вибрацию, контроллер, выполненный с возможностью суммировать первый сигнал считывания со вторым сигналом считывания, чтобы извлекать смещение вибрационного гироскопа.
[0019] Первая угловая позиция оси возбуждения может быть отделена от второй угловой позиции оси возбуждения приблизительно на 45°.
[0020] Первая ось считывания может быть выровнена под углом приблизительно в 45° относительно первой угловой позиции оси возбуждения.
[0021] Вторая ось считывания может быть выровнена под углом приблизительно в 45° относительно второй угловой позиции оси возбуждения.
[0022] Контроллер может быть дополнительно выполнен с возможностью определять угловую скорость гироскопа в то время, когда ось возбуждения вращается.
[0023] Контроллер может быть выполнен с возможностью определять угловую скорость гироскопа из первого и второго сигналов считывания.
[0024] Контроллер может быть выполнен с возможностью использовать определенную угловую скорость гироскопа для того, чтобы определять смещение гироскопа.
[0025] Гироскоп дополнительно может содержать первый контур обратной связи, выполненный с возможностью сравнивать амплитуду вибраций, считываемых посредством первой пары датчиков, с первым опорным амплитудным сигналом и регулировать первую пару исполнительных механизмов согласно сравнению.
[0026] Гироскоп дополнительно может содержать второй контур обратной связи, выполненный с возможностью сравнивать амплитуду вибраций, считываемых посредством второй пары датчиков, со вторым опорным амплитудным сигналом и регулировать вторую пару исполнительных механизмов согласно сравнению.
[0027] Вращение оси возбуждения между первой угловой позицией и второй угловой позицией может содержать изменение первого и второго опорных амплитудных сигналов.
[0028] Первый и/или второй контур обратной связи может содержать аналоговые электронные схемы.
[0029] Контроллер может быть дополнительно выполнен с возможностью определять коэффициент масштабирования гироскопа.
[0030] Контроллер может быть выполнен с возможностью использовать определенный коэффициент масштабирования для того, чтобы определять смещение гироскопа.
[0031] Первая и вторая пара исполнительных механизмов могут быть выполнены с возможностью вращать ось возбуждения в первом направлении и на первой скорости в направлении к угловой позиции и вращать ось возбуждения в направлении от угловой позиции на первой скорости и во втором направлении, которое является противоположным первому направлению. Первая пара датчиков может быть выполнена с возможностью считывать вибрацию резонансной структуры на оси считывания в первое время непосредственно перед тем, как ось возбуждения достигает угловой позиции, и формировать первый сигнал считывания коэффициентов масштабирования, который указывает считываемую вибрацию. Первая пара датчиков может быть дополнительно выполнена с возможностью считывать вибрацию резонансной структуры на оси считывания во второе время сразу после того, как ось возбуждения уходит из угловой позиции, и формировать второй сигнал считывания коэффициентов масштабирования, указывающий считываемую вибрацию. Контроллер может быть выполнен с возможностью вычислять разность между первым и вторым сигналами считывания коэффициентов масштабирования для того, чтобы извлекать коэффициент масштабирования гироскопа.
[0032] Ось считывания может быть отделена от угловой позиции приблизительно на 45°.
[0033] Разность между первым временем и вторым временем может составлять менее приблизительно 50 миллисекунд.
[0034] Согласно третьему аспекту, предусмотрен гироскоп, содержащий резонансную структуру, первую и вторую пару исполнительных механизмов, выполненных с возможностью возбуждать вибрацию вдоль оси возбуждения, первую пару датчиков, выполненных с возможностью считывать вибрацию резонансной структуры вдоль первой оси считывания и формировать первый сигнал считывания, указывающий считываемую вибрацию, первый контур обратной связи, содержащий аналоговые электронные схемы, выполненные с возможностью сравнивать первый сигнал считывания с первым опорным амплитудным сигналом и приводить в действие первую пару исполнительных механизмов согласно сравнению, вторую пару датчиков, выполненных с возможностью считывать вибрацию резонансной структуры вдоль второй оси считывания и формировать второй сигнал считывания, указывающий считываемую вибрацию, второй контур обратной связи, содержащий аналоговые электронные схемы, выполненные с возможностью сравнивать второй сигнал считывания со вторым опорным амплитудным сигналом и приводить в действие вторую пару исполнительных механизмов согласно сравнению, и контроллер, выполненный с возможностью предоставлять первый опорный амплитудный сигнал в первый контур обратной связи и предоставлять второй опорный амплитудный сигнал во второй контур обратной связи, при этом контроллер выполнен с возможностью варьировать первый и второй опорные амплитудные сигналы, чтобы вызывать вращение оси возбуждения вокруг резонансной структуры.
[0035] Сравнение первого сигнала считывания с первым опорным амплитудным сигналом может содержать демодуляцию первого сигнала считывания относительно первого осциллирующего опорного фазового сигнала и определение разности между демодулированным сигналом и первым опорным амплитудным сигналом.
[0036] Сравнение второго сигнала считывания со вторым опорным амплитудным сигналом может содержать демодуляцию второго сигнала считывания относительно второго осциллирующего опорного фазового сигнала и определение разности между демодулированным сигналом и вторым опорным амплитудным сигналом.
[0037] Первый осциллирующий опорный фазовый сигнал и второй опорный фазовый сигнал могут иметь идентичную частоту и фазу.
[0038] Контроллер может быть выполнен с возможностью варьировать первый и второй опорные амплитудные сигналы таким образом, что они представляют собой синусоидальные сигналы относительно времени.
[0039] Контроллер может быть выполнен с возможностью варьировать первый и второй опорные амплитудные сигналы таким образом, что синусоидальные сигналы имеют практически постоянную разность фаз в π/2.
[0040] Контроллер может быть выполнен с возможностью варьировать первый и второй опорные амплитудные сигналы таким образом, что синусоидальные сигналы имеют практически идентичную амплитуду.
[0041] Контроллер может быть дополнительно выполнен с возможностью суммировать первый сигнал считывания со вторым сигналом считывания, чтобы извлекать смещение вибрационного гироскопа.
[0042] Контроллер может быть дополнительно выполнен с возможностью варьировать первый и второй опорные амплитудные сигналы, чтобы вызывать вращение оси возбуждения в первом направлении и на первой скорости в направлении к угловой позиции, и варьировать первый и второй опорные амплитудные сигналы, чтобы вызывать вращение оси возбуждения в направлении от угловой позиции на первой скорости и во втором направлении, которое является противоположным первому направлению. Первая пара датчиков может быть выполнена с возможностью считывать вибрацию резонансной структуры на оси считывания в первое время непосредственно перед тем, как ось возбуждения достигает угловой позиции, и формировать первый сигнал считывания коэффициентов масштабирования, указывающий считываемую вибрацию. Первая пара датчиков может быть дополнительно выполнена с возможностью считывать вибрацию резонансной структуры на оси считывания во второе время сразу после того, как ось возбуждения уходит из угловой позиции, и формировать второй сигнал считывания коэффициентов масштабирования, указывающий считываемую вибрацию. Контроллер может быть дополнительно выполнен с возможностью вычислять разность между первым и вторым сигналами считывания коэффициентов масштабирования для того, чтобы извлекать коэффициент масштабирования гироскопа.
Краткое описание чертежей
[0043] Далее описываются варианты осуществления изобретения только в качестве примера со ссылкой на прилагаемые схематичные чертежи, из которых:
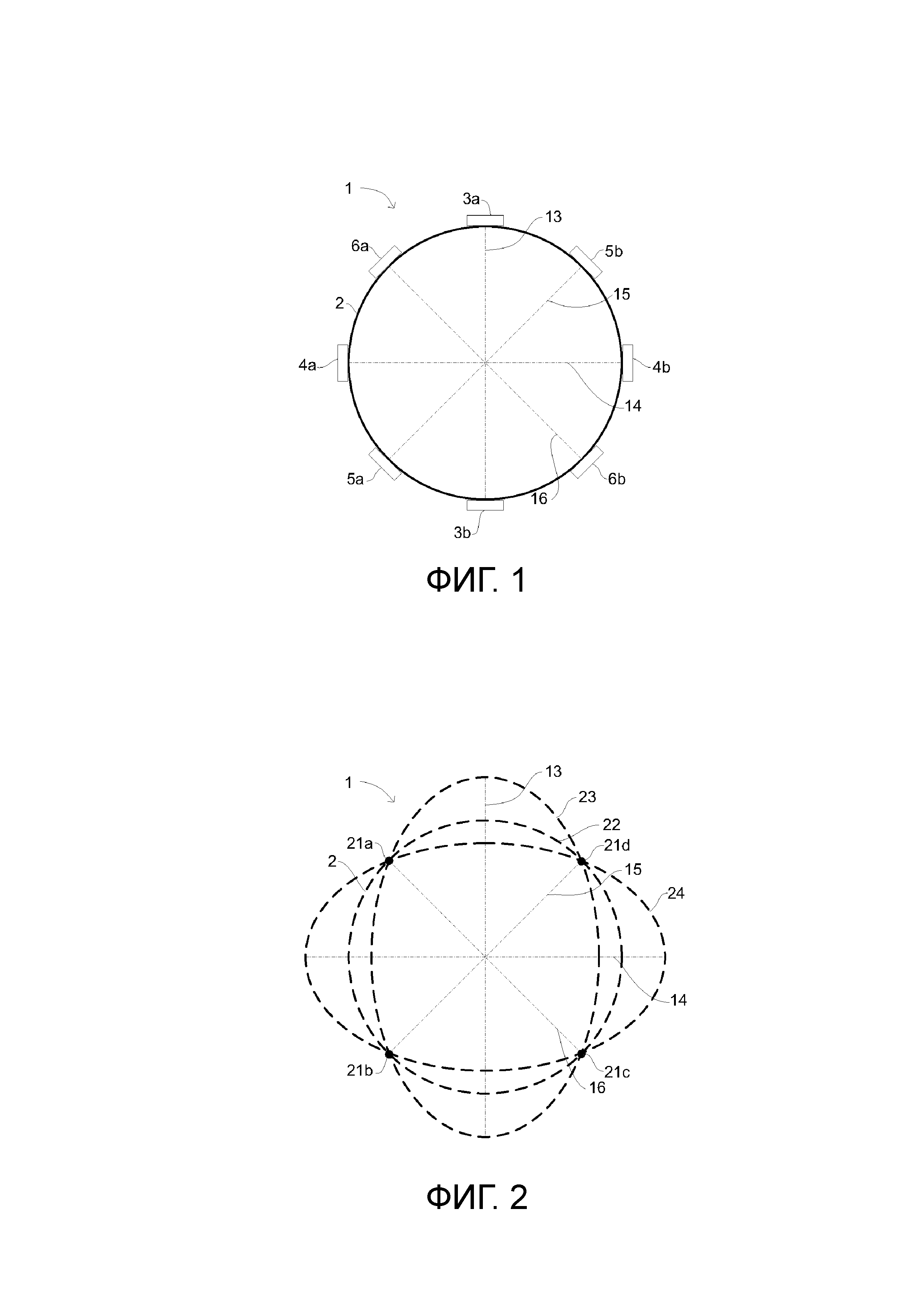
[0044] Фиг. 1 является схематичной иллюстрацией гироскопа;
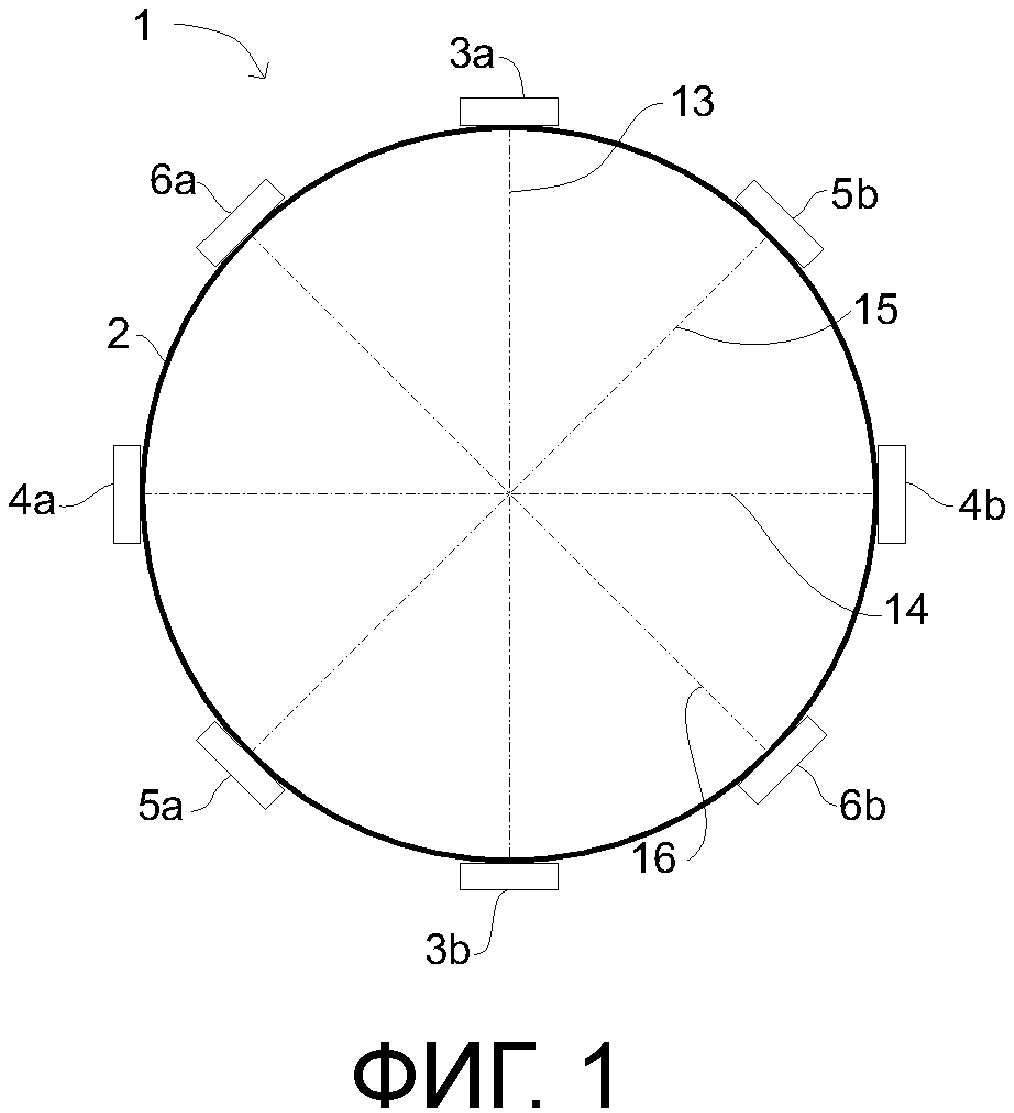
[0045] Фиг. 2 является схематичной иллюстрацией резонансной структуры в различных позициях в ходе вибрации;
[0046] Фиг. 3 является схематичной иллюстрацией системы управления; и
[0047] Фиг. 4 является схематичной иллюстрацией альтернативного варианта осуществления системы управления.
Подробное описание изобретения
[0048] Фиг. 1 является схематичным представлением вибрационного гироскопа 1. Гироскоп 1 содержит резонансную структуру 2. Резонансная структура 2 по фиг. 1, например, может содержать цилиндр. Резонансная структура 2 может иметь форму, как проиллюстрировано в заявке на патент (Европа) EP2669629, которая настоящим полностью содержится в данном документе по ссылке. В других вариантах осуществления, может использоваться резонансная структура 2, имеющая другую форму. Резонансная структура 2 может представлять собой любую аксиально симметричную структуру. Например, резонансная структура 2 может содержать плоское кольцо, полушарие или четырехконтактный камертон, который может упоминаться в качестве квапазона. Резонансная структура 2 может формироваться из одного или более из диапазона различных материалов. Например, резонансная структура 2 может формироваться из слоев металла, пьезоэлектрической керамики, плавленого кварца (плавленого диоксида кремния) и/или тонкопленочного кремния.
[0049] В компоновке, показанной на фиг. 1, множество исполнительных механизмов и датчиков 3-6 позиционируется вокруг резонансной структуры 2. Исполнительные механизмы и датчики 3-6, например, могут содержать пьезоэлектрические или электростатические элементы. Первая пара исполнительных механизмов 3a, 3b позиционируется на противоположных концах оси 13 возбуждения антиузлов, которая проходит через резонансную структуру 2. Первая пара датчиков 4a, 4b позиционируется на противоположных концах оси 14 обнаружения антиузлов, которая проходит через резонансную структуру 2, с тем чтобы формировать угол 90° с осью 13 возбуждения антиузлов. Вторая пара исполнительных механизмов 5a, 5b позиционируется на противоположных концах оси 15 возбуждения узлов, которая проходит через резонансную структуру 2, с тем чтобы формировать угол 45° как с осью 13 возбуждения антиузлов, так и с осью 14 обнаружения антиузлов. Вторая пара датчиков 6a, 6b позиционируется на противоположных концах оси 16 обнаружения узлов, которая проходит через резонансную структуру 2, с тем чтобы формировать угол 45° с осью 13 возбуждения антиузлов и осью 14 обнаружения антиузлов. Ось 16 обнаружения узлов формирует угол 90° с осью 15 возбуждения узлов.
[0050] Первая пара исполнительных механизмов 3a, 3b стимулирует вибрацию вдоль оси 13 возбуждения антиузлов. Вибрация может выполняться на резонансной частоте резонансной структуры 2. Фиг. 2 является схематичной иллюстрацией резонансной структуры 2 в различных позициях в ходе вибрации, которая стимулируется вдоль оси 13 возбуждения антиузлов. Для простоты иллюстрации, исполнительные механизмы и датчики 3-6 исключаются из фиг. 2. Первая пара исполнительных механизмов 3a, 3b прикладывает силы к резонансной структуре 2 таким образом, что резонансная структура 2 колеблется между первой позицией 23 (в которой резонансная структура 2 является вытянутой в эллипс, большая полуось которого является практически выровненной с осью 13 возбуждения антиузлов) и второй позицией 24 (в которой резонансная структура 2 является вытянутой в эллипс, большая полуось которого является практически выровненной с осью 14 обнаружения антиузлов). Следует принимать во внимание, что в ходе колебания, резонансная структура 2 переходит через третью позицию 22, которая представляет собой позицию, в которую ослабляется резонансная структура 2, когда резонансная структура 2 не вибрирует принудительно.
[0051] Если вибрационный гироскоп 1 является стационарным, то вибрации резонансной структуры 2 являются такими, что имеются четыре узла 21a-21d, в которых резонансная структура 2 является практически стационарной. Узлы 21a-21d позиционируются практически на оси 15 обнаружения узлов и оси 16 возбуждения узлов. Точки, в которых резонансная структура 2 пересекает ось 13 возбуждения антиузлов и ось 14 обнаружения антиузлов, могут упоминаться в качестве антиузлов, поскольку эти точки представляют точки, в которых амплитуда вибрации резонансной структуры 2 является максимальной.
[0052] Когда гироскоп 1 подвергается вращению, ось 13 возбуждения антиузлов вращается, и вибрации в резонансной структуре 2 стимулируются (посредством первой пары исполнительных механизмов 3a, 3b) в направлении, отличном от направления, в котором они стимулируются до вращения. Тем не менее, вибрации в резонансной структуре 2 имеют инерцию, которая заставляет вибрации поддерживаться в направлении, идентичном направлению, в котором вибрации возникают до вращения гироскопа 1. Вибрации в резонансной структуре 2 вращаются с вращением гироскопа 1; тем не менее, инерция вибраций заставляет вращение вибраций запаздывать относительно вращения гироскопа 1. Вращение гироскопа 1 в силу этого заставляет вибрации возникать в направлениях, которые не выровнены с осью 13 возбуждения антиузлов или осью 14 обнаружения антиузлов. Если сила не прикладывается к узлам 21a-21d, то этот эффект приводит к принудительному перемещению резонансной структуры 2 в узлах 21a-21d.
[0053] Чтобы измерять угловую скорость гироскопа 1, вторая пара исполнительных механизмов 5a, 5b может действовать с возможностью обнулять узлы 21a-21d, так что сдвиг резонансной структуры 2 практически не возникает в узлах 21a-21d. Как подробнее описано ниже, сила, которая прикладывается для того, чтобы обнулять узлы 21a-21d, является прямо пропорциональной угловой скорости гироскопа 1, и в силу этого измерение этой силы может использоваться для того, чтобы измерять угловую скорость гироскопа 1.
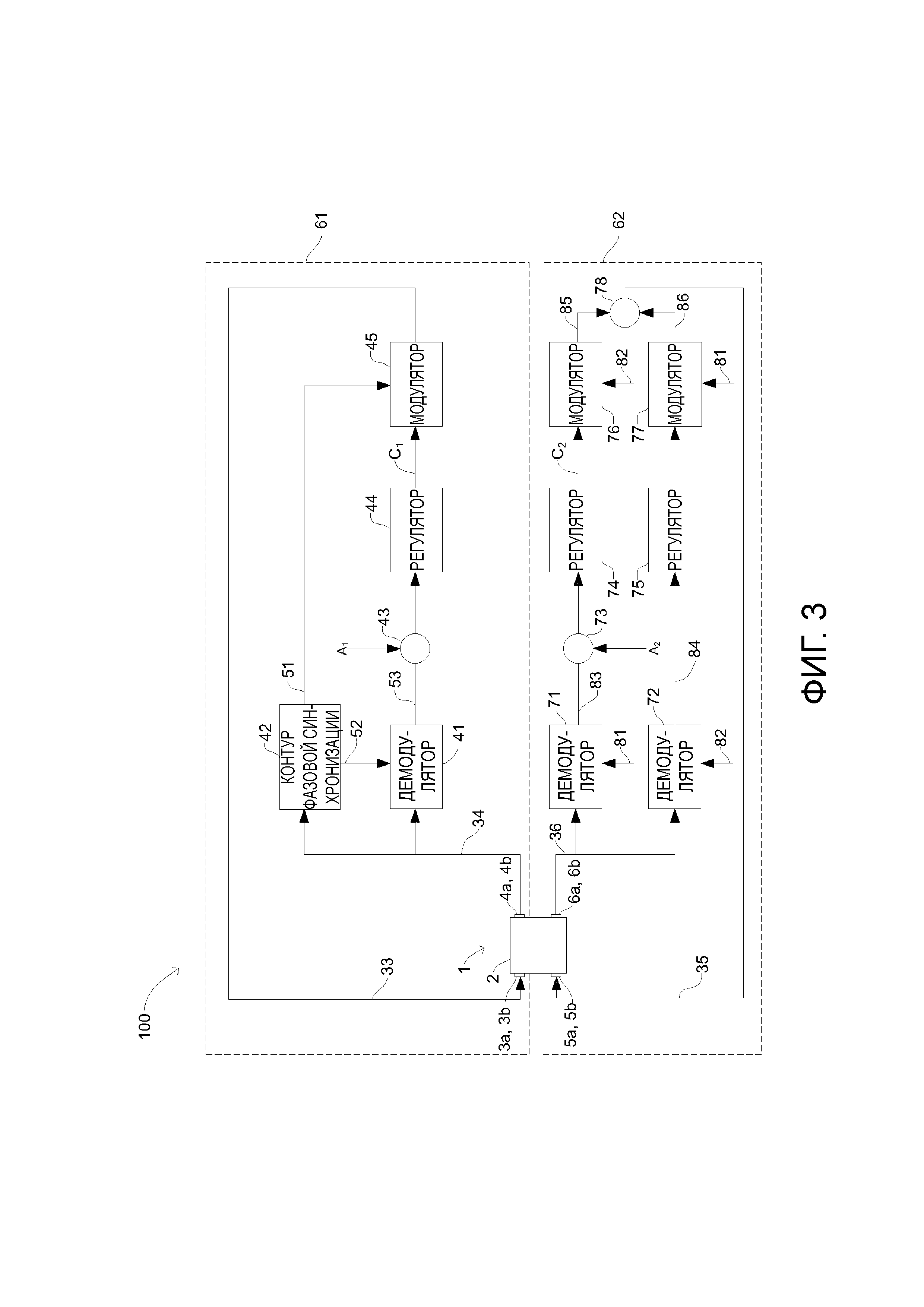
[0054] Фиг. 3 является блок-схемой системы 100 управления, которая может использоваться для того, чтобы управлять исполнительными механизмами 3-6 и измерять вращение гироскопа 1. Для простоты иллюстрации, схема размещения исполнительных механизмов и датчиков 3-6 вокруг резонансной структуры 2 не показана, и вместо этого, резонансная структура 2 показана в блочной форме с исполнительными механизмами и датчиками 3-6, выступающими в качестве вводов и выводов для резонансной структуры 2. В варианте осуществления, система 100 управления реализована с использованием аналоговых электронных схем.
[0055] Первая пара исполнительных механизмов 3a, 3b управляется посредством контура 61 обратной связи по антиузлам. Сигнал 34 обнаружения антиузлов выводится из первой пары датчиков 4a, 4b и служит в качестве входного сигнала в контур 61 обратной связи по антиузлам. Первая пара датчиков 4a, 4b измеряет вибрацию резонансной структуры 2 вдоль оси 14 обнаружения антиузлов и выводит сигнал 34 обнаружения антиузлов, который указывает вибрацию. Сигнал 34 обнаружения антиузлов вводится в демодулятор 41 и контур 42 фазовой синхронизации. Контур 42 фазовой синхронизации выводит опорный фазовый сигнал 51 возбуждения и опорный фазовый сигнал 52 обнаружения на основе частоты и фазы сигнала 34 обнаружения антиузлов. Опорный фазовый сигнал 51 возбуждения колеблется на частоте, при которой резонансная структура 2 стимулируется с возможностью вибрировать, и является синфазным с вибрациями резонансной структуры 2 вдоль оси 13 возбуждения антиузлов. Контур 42 фазовой синхронизации действует с возможностью поддерживать вибрации резонансной структуры 2 в резонансе.
[0056] Опорный фазовый сигнал 52 обнаружения представляет собой осциллирующий сигнал, который имеет постоянную разность фаз в π/2 с опорным фазовым сигналом 51 возбуждения. Опорный фазовый сигнал 52 обнаружения в силу этого является синфазным с вибрациями резонансной структуры 2 вдоль оси 14 обнаружения антиузлов. Опорный фазовый сигнал 52 обнаружения вводится в демодулятор 41 таким образом, что демодулятор 41 выводит сигнал 53 постоянного тока, который указывает амплитуду компонента сигнала 34 обнаружения антиузлов, который является синфазным с опорным фазовым сигналом 52 обнаружения. Сигнал 53 постоянного тока вычитается из первого опорного амплитудного сигнала A1 в модуле 43 вычитания. В этом случае, первый опорный амплитудный сигнал A1 равен сигналу A1 амплитуды вибрации, который имеет требуемую амплитуду вибрации резонансной структуры 2. Разность между первым опорным амплитудным сигналом A1 и сигналом 53 постоянного тока вводится в регулятор 44. Регулятор 44 выводит первый управляющий сигнал C1. Для хорошей аппроксимации, первый управляющий сигнал C1 предоставляется посредством уравнения 1.
 , (1)
, (1)
[0057] где G1 является первым усилением гироскопа 1, k является коэффициентом демпфирования резонансной структуры 2, и A является амплитудой возбужденных вибраций в резонансной структуре 2. Первое усиление G1 зависит, в числе прочего, от электронных усилений исполнительных механизмов и датчиков 3-6 и усилений в системе 100 управления.
[0058] Первый управляющий сигнал C1 модулируется (посредством модулятора 45) посредством опорного фазового сигнала 51 возбуждения таким образом, что он имеет постоянную разность фаз π/2 с вибрациями вдоль оси 13 возбуждения антиузлов, и вводится в первую пару исполнительных механизмов 3a, 3b в качестве сигнала 33 возбуждения антиузлов. Сигнал 33 возбуждения антиузлов приводит в действие первую пару исполнительных механизмов 3a, 3b таким образом, чтобы преодолевать демпфирующие силы в резонансной структуре 2. Контур 61 обратной связи по антиузлам служит для того, чтобы приводить в действие первую пару исполнительных механизмов 3a, 3b с возможностью поддерживать вибрации резонансной структуры 2 вдоль осей 13, 14 антиузлов требуемой амплитуды, частоты и фазы.
[0059] Система 100 управления также включает в себя контур 62 обратной связи по узлам. Сигнал 36 обнаружения узлов выводится из второй пары датчиков 6a, 6b и служит в качестве входного сигнала в контур 62 обратной связи по узлам. Вторая пара датчиков 6a, 6b измеряет вибрации резонансной структуры 2 вдоль оси 16 обнаружения узлов и выводит сигнал 36 обнаружения узлов, который указывает эти вибрации. Сигнал 36 обнаружения узлов вводится в первый демодулятор 71 и второй демодулятор 72. Демодулятор 71 демодулирует сигнал 36 обнаружения узлов со ссылкой на опорный фазовый сигнал 81 обнаружения узлов. Опорный фазовый сигнал 81 обнаружения узлов представляет собой осциллирующий сигнал, который является синфазным с опорным фазовым сигналом 52 обнаружения. На практике, идентичный сигнал может использоваться для опорного фазового сигнала 81 обнаружения узлов и опорного фазового сигнала 52 обнаружения. Демодулятор 71 выводит сигнал 83 постоянного тока, который указывает амплитуду вибраций в узлах 21a-21d, которые обусловлены вибрациями, которые возбуждаются посредством первой пары исполнительных механизмов 3a, 3b. Как описано выше, вибрации в узлах 21a-21d могут вызываться посредством вращения гироскопа 1.
[0060] Сигнал 83 постоянного тока вычитается из второго опорного амплитудного сигнала A2 в модуле 73 вычитания. Второй опорный амплитудный сигнал A2 указывает требуемую амплитуду вибраций резонансной структуры вдоль осей 15, 16 узлов. В нормальном режиме работы гироскопа 1, желательно обнулять узлы 21a-21d таким образом, что вибрация практически не возникает вдоль осей 15, 16 узлов. Второй опорный амплитудный сигнал A2 в силу этого задан равным нулю. Разность между первым опорным амплитудным сигналом A2 и сигналом 83 постоянного тока вводится в регулятор 74. Регулятор 74 выводит второй управляющий сигнал C2. Как подробнее описано ниже, второй управляющий сигнал C2 зависит от угловой скорости гироскопа 1. Второй управляющий сигнал C2 модулируется (с использованием модулятора 76) посредством опорного фазового сигнала 82 возбуждения узлов. Опорный фазовый сигнал 82 возбуждения узлов имеет постоянную разность фаз в π/2 относительно опорного фазового сигнала 81 обнаружения узлов. Сигнал 85, который выводится из модулятора 76, указывает силу, которая когда прикладывается посредством второй пары исполнительных механизмов 5a, 5b, уравновешивает вибрации вдоль осей 15, 16 узлов, которые вызываются посредством вибраций, которые возбуждаются вдоль осей 13, 14 антиузлов и вращения гироскопа 1.
[0061] Сигнал 36 обнаружения узлов также вводится во второй демодулятор 72. Демодулятор 72 демодулирует сигнал 36 обнаружения узлов со ссылкой на опорный фазовый сигнал 82 обнаружения узлов. Опорный фазовый сигнал 82 обнаружения узлов имеет постоянную разность фаз в π/2 с вибрациями, которые возникают вдоль осей 15, 16 узлов и которые вызываются посредством вибраций, которые возбуждаются вдоль осей 13, 14 антиузлов. Демодулятор 72 выводит сигнал 84 постоянного тока, который указывает амплитуду вибраций вдоль оси 16 обнаружения узлов, которые являются несинфазными на π/2 с вибрациями, которые возбуждаются вдоль оси 13 возбуждения антиузлов. Этот сигнал 84 постоянного тока может считаться сигналом ошибки. Сигнал ошибки может возникать вследствие рассогласования между частотами вибрационных мод в резонансной структуре 2. Рассогласование частоты между вибрационными модами может приводить к стимулированию вибрационных мод в направлении от оси 13 возбуждения антиузлов и/или оси 14 обнаружения антиузлов и в силу этого может налагать вибрации резонансной структуры 2 в узлах 21a-21d. Они могут упоминаться в качестве квадратурных вибраций.
[0062] Сигнал 84 постоянного тока вводится в регулятор 75, и вывод регулятора 75 модулируется посредством опорного фазового сигнала 81 обнаружения узлов. Сигнал 86, который выводится из модулятора 77, указывает силу, которая когда прикладывается посредством второй пары исполнительных механизмов 5a, 5b, уравновешивает квадратурные вибрации в узлах 21a-21c. Демодулятор 72, регулятор 75 и модулятор 77 формируют контур обратной связи, который уравновешивает квадратурные вибрации и который может упоминаться в качестве квадратурного контура.
[0063] Сигналы 85 и 86, которые выводятся из модуляторов 76 и 77, суммируются посредством сумматора 78, чтобы формировать сигнал 35 возбуждения узлов, который вводится во вторую пару исполнительных механизмов 5a, 5b. Сигнал 35 возбуждения узлов приводит в действие вторую пару исполнительных механизмов 5a, 5b таким образом, что они уравновешивают вибрации в узлах 21a-21d. Контур 62 обратной связи по узлам в силу этого служит для того, чтобы приводить в действие вторую пару исполнительных механизмов 5a, 5b, с тем чтобы обнулять узлы 21a-21d, таким образом, что сдвиг резонансной структуры 2 практически не возникает в узлах 21a-21d.
[0064] Как пояснено выше, второй управляющий сигнал C2 зависит от угловой скорости гироскопа 1 и в силу этого может использоваться для того, чтобы измерять угловую скорость гироскопа 1. В общем, взаимосвязь между вторым управляющим сигналом C2 и угловой скоростью Ω гироскопа 1 может задаваться посредством уравнения 2:
 , (2)
, (2)
[0065] где G2 является вторым усилением, которое также зависит от электронных усилений исполнительных механизмов и датчиков 3-6 и системы 100 управления, α является коэффициентом связи гироскопа, b является амплитудой гармонической систематической ошибки гироскопа 1, β является соответствующей фазой гармонической систематической ошибки гироскопа 1, и A является амплитудой вибраций, которые возбуждаются в резонансной структуре 2. Коэффициент α связи гироскопа может идентифицироваться посредством заводской калибровки и, в общем, может быть стабильным относительно изменений во времени и по температуре.
[0066] Первое и второе усиления G1 и G2 уравнений 1 и 2 могут изменяться с изменениями во времени и по температуре и в силу этого могут изменяться в ходе работы гироскопа 1. В варианте осуществления, в котором гироскоп 1 является симметричным (например, когда резонансная структура 2 является кольцом, цилиндром, полушарием или другой симметричной формой), первое и второе усиления G1 и G2 могут считаться связанными друг с другом согласно уравнению 3:
 , (3)
, (3)
[0067] где G является опорным усилением, и ε является параметром ошибок усиления, который является в общем небольшим (например,  ). Параметр ε ошибок усиления может определяться посредством заводской калибровки и, в общем, может быть стабильным относительно изменений во времени и по температуре.
). Параметр ε ошибок усиления может определяться посредством заводской калибровки и, в общем, может быть стабильным относительно изменений во времени и по температуре.
[0068] Уравнение 2, которое связывает второй управляющий сигнал C2 с угловой скоростью Ω гироскопа 1, зачастую выражается с точки зрения коэффициента S масштабирования и смещения B гироскопа 1, где коэффициент S масштабирования и смещение B задаются посредством уравнений 4 и 5:
 (4)
(4)
 (5)
(5)
[0069] Уравнение 2 в силу этого может перезаписываться (с использованием уравнений 3-5 и при условии, что  является очень небольшим) в качестве уравнения 6:
является очень небольшим) в качестве уравнения 6:
 (6)
(6)
[0070] Коэффициент S масштабирования может задаваться таким образом, что он включает в себя коэффициент α связи гироскопа. Тем не менее, коэффициент S масштабирования, который упоминается в данной заявке, не включает в себя коэффициент α связи гироскопа, и он представляет собой коэффициент S масштабирования (заданный посредством уравнения 4), который обнаруживается и используется в процессах калибровки, описанных ниже. Следует принимать во внимание, что коэффициент S масштабирования, который включает в себя коэффициент α связи гироскопа, может легко извлекаться из коэффициента S масштабирования, как задано посредством уравнения 4, посредством простого умножения коэффициента S масштабирования на коэффициент α связи гироскопа.
[0071] Из уравнения 6 следует принимать во внимание, что для того, чтобы точно определять угловую скорость Ω гироскопа 1, должны определяться коэффициент S масштабирования и смещение B. Типично коэффициент S масштабирования и/или смещение B могут определяться посредством выполнения калибровки гироскопа 1, когда гироскоп 1 не используется. Например, гироскоп 1 может монтироваться на калибровочном столе, который вращается на известной частоте. Второй управляющий сигнал C2 может измеряться в то время, когда гироскоп 1 подвергается известному вращению, и величина Sα и/или смещение B может вычисляться. Определение величины Sα может обеспечивать возможность определения коэффициента S масштабирования. Тем не менее, вышеописанный способ калибровки может осуществляться только когда, когда гироскоп 1 размещен на калибровочном столе, например, на заводе или в лаборатории. Это может требовать вынимания гироскопа 1 из устройства, вращение которого гироскоп 1 выполнен с возможностью измерять, и не обеспечивает возможность калибровки гироскопа 1 в ходе эксплуатации.
[0072] Как коэффициент S масштабирования, так и смещение B зависят от множества факторов, таких как электронные усиления в системе 100 управления и исполнительных механизмах и датчиках 3-6, механические свойства резонансной структуры 2 и систематические и фазовые ошибки в гироскопе 1. Некоторые или все эти факторы могут изменяться с изменениями во времени и/или по температуре, и в силу этого коэффициент S масштабирования и/или смещение B могут изменяться во времени и/или по температуре. Смещение B и/или коэффициент S масштабирования, которые определяются в процессе лабораторной калибровки, в силу этого могут не быть точными для измерений, проведенных позднее и/или при другой температуре относительно температуры, при которой выполнена калибровка. В силу этого, это может приводить к ошибкам в измерениях, проводимых посредством гироскопа 1.
[0073] Следовательно, желательно предоставлять способ калибровки гироскопа 1 для того, чтобы определять смещение B и/или коэффициент S масштабирования, что может выполняться в ходе эксплуатации. Имеются известные способы калибровки гироскопа 1 в ходе эксплуатации для того, чтобы определять коэффициент S масштабирования; тем не менее, эти способы игнорируют учет смещения B. В общем, смещение B может считаться смещением во взаимосвязи между вибрациями вдоль оси 16 обнаружения узлов и угловой скоростью Ω гироскопа 1. Ошибки в смещении B в силу этого транслируются в ошибки в определении угловой скорости Ω гироскопа 1. Следовательно, желательно предоставлять способ калибровки гироскопа 1 для того, чтобы определять смещение B. Дополнительно желательно предоставлять способ калибровки гироскопа 1 для того, чтобы определять смещение B, что может выполняться одновременно с тем, как гироскоп 1 предоставляет измерения угловой скорости Ω гироскопа 1.
[0074] Чтобы калибровать гироскоп 1, ось 13 возбуждения антиузлов, вдоль которой возбуждаются вибрации, может вращаться относительно резонансной структуры 2. Это в некоторой степени является аналогичным размещению гироскопа 1 на калибровочном столе и вращению гироскопа 1 при поддержании оси 13 возбуждения антиузлов фиксированной относительно резонансной структуры 2. Например, по мере того, как ось 13 возбуждения антиузлов вращается вокруг резонансной структуры 2, вибрации в резонансной структуре 2 придерживаются вращения оси 13. Тем не менее, вибрации в резонансной структуре 2 имеют инерцию, которая заставляет вращение вибраций запаздывать относительно вращения оси 13 возбуждения антиузлов. Это является аналогичным эффекту, который возникает, когда гироскоп 1 вращается, и вращение вибраций в гироскопе запаздывает относительно вращения гироскопа 1.
[0075] Преимущественно, ось 13 возбуждения антиузлов может вращаться вокруг резонансной структуры 2 без физического вращения исполнительных механизмов и датчиков 3-6 относительно резонансной структуры 2. Вместо этого, первый опорный амплитудный сигнал A1 и второй опорный амплитудный сигнал A2 могут быть изменены согласно угловой позиции оси 13 возбуждения антиузлов вокруг резонансной структуры 2. Например, первый и второй опорные амплитудные сигналы могут задаваться согласно уравнениям 7 и 8:
 (7)
(7)
 , (8)
, (8)
[0076] где θ равен 2λ, и λ является физическим углом, под которым ось 13 возбуждения антиузлов позиционируется относительно позиции, показанной на фиг. 1 и 2. Первый и второй опорные амплитудные сигналы A1, A2, например, могут задаваться посредством контроллера (не показан). Угол λ, под которым позиционируется ось 13 возбуждения антиузлов, может вращаться посредством изменения значения 6 в уравнениях 7 и 8.
[0077] В варианте осуществления, система 100 управления может быть реализована с использованием аналоговых электронных схем. Это может обеспечивать возможность простого вращения оси 13 возбуждения антиузлов с использованием существующих аппаратных средств и посредством простого изменения опорных амплитудных сигналов A1, A2, которые вводятся в контуры 61, 62 обратной связи. В общем, использование аналоговых электронных схем может обеспечивать возможность простой реализации изобретения с минимальными изменениями существующих аппаратных средств.
[0078] Угол θ может изменяться со скоростью  , где является первой производной по времени θ (т.е.
, где является первой производной по времени θ (т.е.  ). В этом случае, первый C1 и второй C2 управляющие сигналы могут задаваться посредством уравнений 9 и 10:
). В этом случае, первый C1 и второй C2 управляющие сигналы могут задаваться посредством уравнений 9 и 10:
 (9)
(9)
 (10)
(10)
[0079] В варианте осуществления способа калибровки гироскопа 1, возбуждение антиузлов первоначально позиционируется в первой угловой позиции. Например, угол θ может начинаться при θ=0, и первая угловая позиция первой оси 13 возбуждения является такой, как показано на фиг. 1 и 2. Ось 13 возбуждения антиузлов затем непрерывно вращается во вторую угловую позицию. Например, угол θ может вращаться с θ=0 до θ=π/2, и в этой точке вращение прекращается. В этом примере, физический угол λ, под которым позиционируется ось 13 возбуждения антиузлов, непрерывно вращается через угол приблизительно в 45° между первой угловой позицией (когда θ=0 и λ=0) и второй угловой позицией (когда θ=π/2 и λ=45°).
[0080] В ходе вращения θ и результирующего вращения осей 13-16 вокруг резонансной структуры 2, исполнительные механизмы и датчики 3-6 остаются стационарными относительно резонансной структуры 2. По мере того, как угол θ и оси 13-16 вращаются, первый и второй управляющие сигналы C1, C2 указывают комбинацию вибрации резонансной структуры 2 вдоль осей 13, 14 антиузлов и вдоль осей 15, 16 узлов. Пропорция каждого управляющего сигнала C1, C2, которая обусловлена вибрациями вдоль осей антиузлов 13,14 и пропорция каждого управляющего сигнала C1, C2, которая обусловлена вибрациями вдоль осей 15, 16 узлов, зависит от угла θ. Например, когда θ=0, ось 14 обнаружения антиузлов идет между первой парой датчиков 4a, 4b, выходной сигнал 34 которых используется для того, чтобы формировать первый управляющий сигнал C1, и в силу этого первый управляющий сигнал C1 зависит только от вибраций резонансной структуры 2 вдоль оси 14 обнаружения антиузлов. Когда θ=0, ось 16 обнаружения узлов идет между второй парой датчиков 6a, 6b, выходной сигнал 36 которых используется для того, чтобы формировать второй управляющий сигнал C2, и в силу этого второй управляющий сигнал C2 зависит только от вибраций резонансной структуры 2 вдоль оси 16 обнаружения узлов. Когда θ=π/2, ось 16 обнаружения узлов идет между первой парой датчиков 4a, 4b, и в силу этого первый управляющий сигнал C1 зависит только от вибраций резонансной структуры 2 вдоль оси 16 обнаружения узлов. Когда θ=π/2, ось 14 обнаружения антиузлов идет между второй парой датчиков 6a, 6b, и в силу этого второй управляющий сигнал C2 зависит только от вибраций резонансной структуры 2 вдоль оси 14 обнаружения антиузлов.
[0081] В варианте осуществления системы 100 управления, которая показана на фиг. 3, вращение оси 14 обнаружения антиузлов от прохождения между первой парой датчиков 4a, 4b (когда θ=0) до прохождения между второй парой датчиков 6a, 6b (θ=π/2) может заставлять ввод в контур 42 фазовой синхронизации приближаться к нулю по мере того, как θ приближается к π/2. Это обусловлено тем, что по мере того, как θ приближается к π/2, ввод в контур 42 фазовой синхронизации становится сильно зависящим от вибраций резонансной структуры 2 вдоль оси 16 обнаружения узлов, в отличие от вибраций резонансной структуры 2 вдоль оси обнаружений антиузлов 14. При многих условиях, вибрации резонансной структуры 2 вдоль оси 16 обнаружения узлов являются небольшими и могут быть значительно меньшими, чем вибрации резонансной структуры 2 вдоль оси 14 обнаружения антиузлов. По мере того, как угол θ приближается к π/2 (и ось 16 обнаружения узлов приближается к прохождению между первой парой датчиков 4a, 4b), амплитуда ввода в контур 42 фазовой синхронизации в силу этого может становиться небольшой. Небольшой ввод в контур 42 фазовой синхронизации может приводить к тому, что контур фазовой синхронизации становится нестабильным, и может влиять на стабильность опорных фазовых сигналов 51, 52.
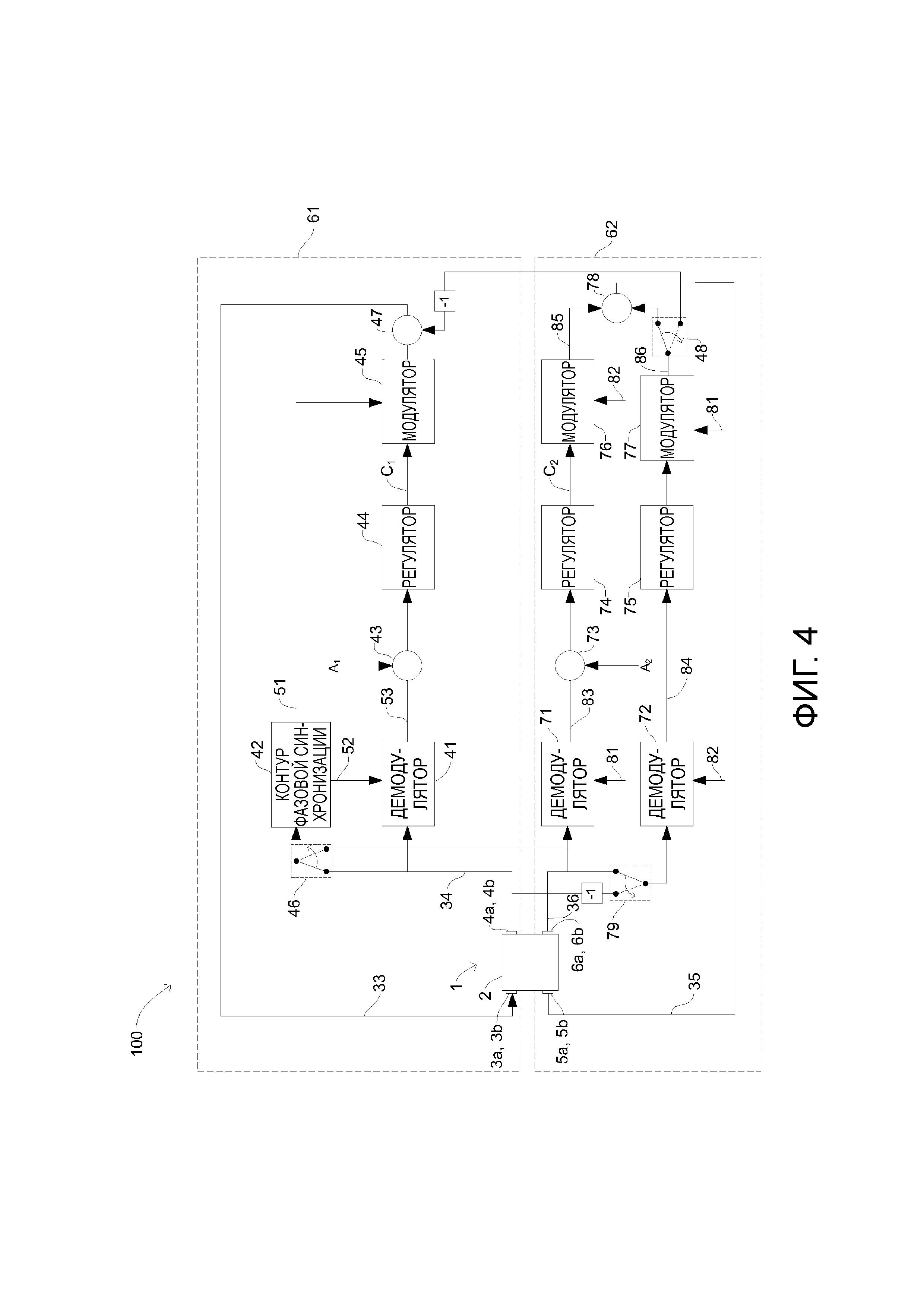
[0082] Фиг. 4 является схематичной иллюстрацией системы 100 управления, которая может преодолевать проблему небольшого ввода в контур 42 фазовой синхронизации, вызываемый посредством изменений в 0. Система 100 управления по фиг. 4 включает в себя все компоненты системы 100 управления по фиг. 3. Эти компоненты помечаются аналогичными ссылками с номерами и не описываются здесь снова со ссылкой на фиг. 4.
[0083] Система 100 управления по фиг. 4 дополнительно включает в себя переключатель 46, который выполнен с возможностью переключать ввод в контур 42 фазовой синхронизации между сигналом 34 обнаружения, который выводится из первой пары датчиков 4a, 4b, и сигналом 36 обнаружения, который выводится из второй пары датчиков 6a, 6b. Переключатель 46 может соединять сигнал 34 обнаружения из первой пары датчиков 4a, 4b с контуром 42 фазовой синхронизации, когда θ=0, и может соединять сигнал 36 обнаружения из второй пары датчиков 6a, 6b с контуром 42 фазовой синхронизации, когда θ=π/2. Ввод в контур 42 фазовой синхронизации может переключаться с сигнала 34 обнаружения на сигнал 36 обнаружения для любого угла между θ=0 и θ=π/2. Например, в варианте осуществления, переключатель 46 может переключать ввод в контур 42 фазовой синхронизации с сигнала 34 обнаружения на сигнал 36 обнаружения, когда θ=π/4. Это может обеспечивать то, что ввод в контур 42 фазовой синхронизации имеет достаточную амплитуду для стабильной работы контура 42 фазовой синхронизации в любом случае.
[0084] Также может быть желательным переключать ввод во второй демодулятор 72 контура 62 обратной связи. По мере того, как ось 13 возбуждения антиузлов вращается вокруг резонансной структуры 2, ось 14 обнаружения антиузлов вращается в направлении от первой пары датчиков 4a, 4b и ко второй паре датчиков 6a, 6b. Между тем, ось 16 обнаружения узлов вращается в направлении от второй пары датчиков 6a, 6b и к первой паре датчиков 4a, 4b. Сигнал 34 обнаружения, который выводится из первой пары датчиков 4a, 4b, в силу этого становится все больше и больше указывающим вибрации резонансной структуры 2 вдоль оси 16 обнаружения узлов, а сигнал 36 обнаружения, который выводится из второй пары датчиков 6a, 6b, становится все больше и больше указывающим вибрации резонансной структуры 2 вдоль оси 14 обнаружения антиузлов.
[0085] Как описано выше, ввод в контур 42 фазовой синхронизации может переключаться с сигнала 34 обнаружения на сигнал 36 обнаружения. После этого переключения, все квадратурные вибрации, которые обнаруживаются посредством второй пары датчиков 6a, 6b, могут обнуляться посредством контура 61 обратной связи, поскольку сигнал 36 обнаружения, который выводится из второй пары датчиков 6a, 6b, теперь вводится в контур 42 фазовой синхронизации. Если сигнал 36 обнаружения должен продолжать вводиться во второй демодулятор 72, то вывод второго демодулятора 72 может приближаться к нулю, поскольку контур 61 обратной связи обнуляет квадратурные вибрации, которые обнаруживаются посредством второй пары датчиков 6a, 6b. Тем не менее, первая пара датчиков 4a, 4b может обнаруживать квадратурные вибрации, которые больше не обнуляются, поскольку сигнал 34 обнаружения больше не вводится в контур 42 фазовой синхронизации. Ввод во второй демодулятор 72 контура 62 обратной связи в силу этого переключается на сигнал 34 обнаружения, который выводится из первой пары датчиков 4a, 4b таким образом, что контур 62 обратной связи действует с возможностью обнулять квадратурные вибрации, которые обнаруживаются посредством первой пары датчиков 4a, 4b.
[0086] Ввод в демодулятор 72 может переключаться с использованием переключателя 79, как показано на фиг. 4. Переключатель 79 выполнен с возможностью переключать ввод во второй демодулятор 72 между сигналом 36 обнаружения из второй пары датчиков 6a, 6b и сигналом 34 обнаружения из первой пары датчиков 4a, 4b. Переключатель 79 может переключать ввод во второй демодулятор 72 с сигнала 36 обнаружения на сигнал 34 обнаружения одновременно с тем, как переключатель 46 переключает ввод в контур фазовой синхронизации (например, когда θ=π/4). Во избежание внезапного скачка в сигнале, который вводится во второй демодулятор 72, сигнал 34 обнаружения умножается на -1 до переключателя 79, как показано на фиг. 4. Это действует с возможностью уменьшать все скачки во вводе во второй демодулятор 72, которые возникают, когда ввод во второй демодулятор 72 переключается между сигналами 34, 36 обнаружения, и позволяет не допускать изменения знака ввода во второй демодулятор 72.
[0087] Когда ввод во второй демодулятор 72 переключается посредством переключателя 79, сигнал возбуждения, с которым суммируется вывод 86 модулятора 77, также переключается. Это обусловлено тем, что сдвиги резонансной структуры 2, которые считываются посредством первой пары датчиков 4a, 4b, уравновешиваются посредством первой пары исполнительных механизмов 3a, 3b, тогда как сдвиги, которые считываются посредством второй пары датчиков 6a, 6b, уравновешиваются посредством второй пары исполнительных механизмов 5a, 5b, когда переключатель 79 переключает ввод во второй демодулятор 72 с сигнала 36 обнаружения на сигнал 34 обнаружения, переключатель 48 переключает вывод 86 модулятора 77 таким образом, что вывод 86 суммируется с сигналом 33 возбуждения, который приводит в действие первую пару исполнительных механизмов 3a, 3b, поскольку вывод 86 теперь является функцией сигнала 34 обнаружения, который выводится из первой пары датчиков 4a, 4b. Вывод 86 из модулятора 77 суммируется с сигналом 33 возбуждения посредством сумматора 47, показанного на фиг. 4. До того, как вывод 86 из модулятора 77 суммируется с сигналом 33 возбуждения, он сначала умножается на -1, как показано на фиг. 4. Это изменяет на противоположное эффект умножения сигнала 34 обнаружения на -1 до переключателя 79.
[0088] В варианте осуществления, ось 13 возбуждения антиузлов вращается между первой угловой позицией, когда θ=0, и второй угловой позицией, когда θ=π/2. Переключатели 46, 48 и 79, например, могут переключаться под углом между θ=0 и θ=π/2. Например, переключатели 46, 48 и 79 могут переключаться, когда θ=π/4. Переключение переключателей 46, 48 и 79 под углом, который находится близко к θ=π/4, может преимущественно уменьшать размер всех скачков в сигналах, которые компоненты принимают системы 100 с обратной связью, когда переключатели 46, 48 и 79 переключаются.
[0089] В альтернативном подходе, роль контуров 61, 62 обратной связи по антиузлам и узлам может полностью переключаться в ходе вращения угла θ. Например, при значении θ между 0 и π/2 (например, когда θ=π/4), ввод в контур 61 обратной связи по антиузлам может переключаться с сигнала 34 обнаружения на сигнал 36 обнаружения, и ввод в контур 62 обратной связи по узлам может переключаться с сигнала 36 обнаружения на сигнал 34 обнаружения. По мере того, как вводы в контуры 61, 62 обратной связи переключаются, сигнал, который приводит в действие первую и вторую пару исполнительных механизмов, также может переключаться. Например, ввод в первую пару исполнительных механизмов 3a, 3b может быть переключен таким образом, что вывод из контура 62 обратной связи по узлам приводит в действие первую пару исполнительных механизмов 3a, 3b, и ввод во вторую пару исполнительных механизмов 5a, 5b может быть переключен таким образом, что вывод из контура 61 обратной связи по антиузлам приводит в действие вторую пару исполнительных механизмов 5a, 5b. После такого переключения, контур 61 обратной связи по антиузлам приводит в действие вторую пару исполнительных механизмов 5a, 5b на основе сигнала 36 обнаружения из второй пары датчиков 6a, 6b, и контур 62 обратной связи по узлам приводит в действие первую пару исполнительных механизмов 3a, 3b на основе сигнала 34 обнаружения из первой пары датчиков 4a, 4b.
[0090] Следует принимать во внимание, что переключение ролей контуров 61, 62 обратной связи по антиузлам и узлам также должно изменять информацию, которая переносится посредством первого и второго управляющих сигналов C1, C2. Например, после переключения ролей контуров 61, 62 обратной связи, управляющий сигнал, который выводится из контура 62 обратной связи по узлам, становится первым управляющим сигналом C1, а управляющий сигнал, который выводится из контура 61 обратной связи по антиузлам, становится вторым управляющим сигналом C2. В уравнениях, представленных в этом описании, первый управляющий сигнал считается управляющим сигналом, который задается согласно сигналу 34 обнаружения, который выводится из первой пары датчиков 4a, 4b, а второй управляющий сигнал считается управляющий сигналом, заданным согласно сигналу 36 обнаружения, который выводится из второй пары датчиков 6a, 6b.
[0091] Смещение B может вычисляться с учетом второго управляющего сигнала C2, когда ось 13 возбуждения антиузлов находится в первой угловой позиции (например, когда θ=0), и первого управляющего сигнала C1, когда ось 13 возбуждения антиузлов находится во второй угловой позиции (например, когда θ=π/2). Когда ось 13 возбуждения антиузлов находится в первой угловой позиции (идущей между первой парой исполнительных механизмов 3a, 3b), и θ=0, угол θ может быть стационарным таким образом, что =0. Вставка этих значений в уравнение 10 обуславливает уравнение 11:
 (11)
(11)
[0092] Второй управляющий сигнал C2(0), когда ось 13 возбуждения антиузлов находится в первой угловой позиции, как задано посредством уравнения 11, может считаться первым сигналом считывания процесса калибровки. Первый сигнал считывания C2(0) указывает вибрации резонансной структуры 2 на первой оси считывания резонансной структуры 2 в то время, когда ось 13 возбуждения антиузлов находится в первой угловой позиции. В этом примере, первая ось считывания представляет собой ось 16 обнаружения узлов, которая идет между второй парой датчиков 6a, 6b, когда θ=0.
[0093] После того, как вращение осуществлено, ось 13 возбуждения антиузлов находится во второй угловой позиции (идущей между второй парой исполнительных механизмов 5a, 5b), и θ=π/2. Угол θ может еще раз быть стационарным таким образом, что =0. Вставка этих значений в уравнение 9 обуславливает уравнение 12:
 (12)
(12)
[0094] Первый управляющий сигнал C1(π/2), когда ось 13 возбуждения антиузлов находится во второй угловой позиции, как задано посредством уравнения 12, может считаться вторым сигналом считывания процесса калибровки. Второй сигнал считывания C1(π/2) указывает вибрации резонансной структуры 2 на второй оси считывания резонансной структуры 2 в то время, когда ось 13 возбуждения антиузлов находится во второй угловой позиции. В этом примере, вторая ось считывания представляет собой ось 16 обнаружения узлов, которая идет между первой парой датчиков 4a, 4b, когда θ=π/2.
[0095] Смещение B гироскопа 1 может определяться посредством суммирования первого сигнала считывания со вторым сигналом считывания. Первый сигнал считывания и второй сигнал считывания, например, могут суммироваться между собой посредством контроллера (не показан), который может использовать сумму первого и второго сигналов считывания, чтобы определять смещение B. Суммирование уравнений 11 и 12 между собой обуславливает уравнение 13:
 (13)
(13)
[0096] В некоторых случаях, ошибка усиления может считаться пренебрежимо малой, и в силу этого параметр ε ошибок усиления может считаться равным нулю. В этом случае, уравнение 13 сокращается, чтобы предоставлять уравнение 14:
 (14)
(14)
[0097] Из уравнения 14 можно видеть, что если коэффициент S масштабирования известен, посредством суммирования второго управляющего сигнала C2, когда ось 13 возбуждения антиузлов находится в первой угловой позиции, с первым управляющим сигналом C1, когда ось 13 возбуждения антиузлов находится во второй угловой позиции, и игнорирования параметра ε ошибок усиления, может извлекаться смещение B. Тем не менее, чтобы повышать точность, с которой извлекается смещение B, параметр ε ошибок усиления может быть включен в определение смещения B. В этом случае, уравнение 13 может быть перекомпоновано, чтобы предоставлять уравнение 15:
 (15)
(15)
[0098] Из уравнения 15 следует принимать во внимание, что извлечение смещения B с использованием уравнения 15 требует знания коэффициента S масштабирования и угловой скорости Ω гироскопа 1. Угловая скорость Ω гироскопа 1 может определяться посредством перекомпоновки уравнения 13, чтобы предоставлять уравнение для b*sinβ, и подстановки означенного в уравнение 12. Перекомпоновка результирующего уравнения и допущение того, что  , предоставляет аппроксимацию угловой скорости Ω гироскопа 1, которая предоставляется посредством уравнения 16:
, предоставляет аппроксимацию угловой скорости Ω гироскопа 1, которая предоставляется посредством уравнения 16:
 (16)
(16)
[0099] При знании коэффициента S масштабирования, уравнение 16 в силу этого может использоваться для того, чтобы вычислять угловую скорость Ω гироскопа 1, которая затем может подставляться в уравнение 15 для того, чтобы извлекать смещение B. Этот способ преимущественно обеспечивает возможность вычисления смещения B с повышенной точностью в силу включения учета параметра ε ошибок усиления. Параметр ε ошибок усиления, например, может определяться в процессе заводской калибровки и может считаться относительно стабильным относительно изменений во времени и/или по температуре.
[0100] Непрерывное вращение угла θ между первой и второй угловой позицией преимущественно обеспечивает возможность непрерывного измерения угловой скорости Ω гироскопа 1 в то время, когда выполняется процесс калибровки для того, чтобы определять смещение B. В то время, когда угол θ вращается, измерение угловой скорости, которое выводится посредством гироскопа 1, представляет комбинацию фактической угловой скорости Ω гироскопа 1 и угловой скорости угла θ. Угловая скорость угла θ известна и в силу этого может вычитаться из измерения угловой скорости, которое выводится посредством гироскопа 1 для того, чтобы извлекать истинную угловую скорость Ω гироскопа 1. Уравнение 16 может эквивалентно использоваться для того, чтобы измерять угловую скорость Ω гироскопа 1 в то время, когда выполняется процесс калибровки для того, чтобы определять смещение B (при условии, что угловая скорость Ω является постоянной между первой и второй угловыми позициями).
[0101] Непрерывное вращение угла θ между первой и второй угловой позицией с тем, чтобы обеспечивать возможность непрерывного мониторинга угловой скорости Ω, когда гироскоп 1 калибруется, является преимущественным для вариантов применения, в которых желательно, чтобы отсутствовало значительное прерывание в измерении угловой скорости Ω. В некоторых вариантах применения, несколько гироскопов могут позиционироваться с возможностью измерять идентичное вращение. Это может предоставлять избыточность и может обеспечивать возможность одному гироскопу измерять вращение в то время, когда другой гироскоп калибруется. Тем не менее, способ, описанный выше, обеспечивает возможность измерения угловой скорости гироскопа 1 одновременно с тем, как калибровка выполняется, и в силу этого потребность в нескольких гироскопах, выполненных с возможностью измерять идентичное вращение, уменьшается.
[0102] Хотя выше описан конкретный вариант осуществления способа вычисления смещения B, в котором угол θ непрерывно вращается от 0 до π/2, следует принимать во внимание, что вместо этого могут использоваться другие вращения угла θ. Например, смещение B может определяться в процессе калибровки, в котором угол θ первоначально равен π/2 и вращается от π/2 до 0. Первый и второй управляющие сигналы C1 и C2 в двух экстремальных значениях этого вращения (когда θ=0, и когда θ=π/2) могут использоваться в уравнениях 13-16 для того, чтобы определять смещение B. В варианте осуществления способа калибровки, угол θ может последовательно вращаться между двумя углами. Например, угол θ может вращаться от θ=0 до θ=π/2 и затем может вращаться от θ=π/2 обратно до θ=0.
[0103] Угол θ может вращаться между двумя угловыми позициями (например, между θ=0 и θ=π/2) на любой угловой скорости . Например, угол θ может вращаться между двумя угловыми позициями с постоянной скоростью. В некоторых вариантах осуществления, угловая скорость угла θ может варьироваться по мере того, как θ вращается между двумя угловыми позициями (например, между θ=0 и θ=π/2). Например, в варианте осуществления, угол θ может быть стационарным (т.е. =0) в первой угловой позиции (например, θ=0) таким образом, что второй управляющий сигнал C2 может измеряться в первой угловой позиции. Угловая скорость затем может увеличиваться таким образом, что θ непрерывно вращается в направлении второй угловой позиции (например, θ=π/2). Угловая скорость , например, может непрерывно увеличиваться до тех пор, пока θ не находится в середине между первой и второй угловыми позициями. Угловая скорость затем может снижаться по мере, того как θ приближается ко второй угловой позиции, в которой точка θ может быть стационарной, и первый управляющий сигнал C1 может измеряться во второй угловой позиции. Первый управляющий сигнал C1 во второй угловой позиции затем может суммироваться со вторым управляющим сигналом C2 в первой угловой позиции, чтобы извлекать смещение B, как описано выше со ссылкой на уравнение 15.
[0104] Увеличение и уменьшение угловой скорости угла θ между первой и второй угловыми позициями может преимущественно уменьшать количество времени между проведением измерений первого и второго управляющих сигналов в первой и второй угловых позициях, чтобы извлекать смещение B, при предоставлении возможности углу θ быть стационарным в первой и второй угловых позициях. Угол θ, стационарный в первой и второй угловых позициях, может повышать точность измерений первого и второго управляющих сигналов, которые проводятся в первой и второй угловых позициях. Тем не менее, в некоторых вариантах осуществления, угол θ может не быть стационарным в первой и/или второй угловых позициях. Вместо этого, угол θ может вращаться через первую и/или вторую угловые позиции, и первый и второй управляющие сигналы могут измеряться по мере того, как угол θ проходит через первую и вторую угловые позиции, чтобы извлекать смещение B. Тем не менее, измерение первого и/или второго управляющих сигналов по мере того, как угол θ вращается через первую и/или вторую угловые позиции, может невыгодно уменьшать точность определения смещения B. В варианте осуществления, в котором угол θ не является стационарным в первой и/или второй угловых позициях, угловая скорость угла θ может уменьшаться около первой и/или второй угловых позиций, чтобы повышать точность определения смещения B.
[0105] Способы, которые описаны выше (со ссылкой на уравнения 11-16), чтобы извлекать смещение B, базируются на таком допущении, что угловая скорость Ω гироскопа 1 является идентичной, когда ось 13 возбуждения антиузлов находится в первой угловой позиции (например, когда θ=0), с тем тогда, когда ось 13 возбуждения антиузлов находится во второй угловой позиции (например, когда θ=π/2). Это, например, может быть истиной, если калибровка выполняется в то время, когда известно, что гироскоп 1 является стационарным. Тем не менее, это не всегда может быть практичным, и может быть желательным выполнять калибровку в периоды времени, когда гироскоп 1 не является стационарным. Если гироскоп расположен на такой платформе, как судно, которое подвергается низкой скорости s углового вращения и низким изменениям углового ускорения, то вращение платформы должно иметь незначительный эффект при калибровке (например, если калибровка выполняется за период времени в 50 мс). Если гироскоп расположен на такой платформе, как самолет или ракета, то скорость s углового вращения и изменения углового ускорения могут существенно влиять на калибровку (например, если калибровка выполняется за период времени в 50 мс). В этом случае, период времени калибровки может существенно уменьшаться таким образом, что изменение угловой скорости меньше требуемой точности калибровки. Любое изменение угловой скорости в ходе калибровки должно проявляться непосредственно в качестве систематической ошибки. В общем, калибровка, описанная выше, может выполняться в период времени, который является достаточно коротким, так что любое изменение угловой скорости Ω гироскопа меньше требуемой точности калибровки.
[0106] Как пояснено выше, чтобы вычислять смещение B, могут требоваться некоторое знание коэффициента S масштабирования. На практике, знание значения Sα может требоваться в ходе эксплуатационного использования гироскопа 1. Тем не менее, коэффициент α связи гироскопа может быть стабильным относительно изменений во времени и по температуре и может идентифицироваться посредством заводской калибровки. Определение коэффициента S масштабирования в силу этого обеспечивает возможность определения значения Sα. Коэффициент S масштабирования может определяться в процессе заводской калибровки. Тем не менее, коэффициент S масштабирования может изменяться во времени и/или по температуре. Это может приводить к некоторой неопределенности в коэффициенте S масштабирования, если на значении заводской калибровки коэффициента масштабирования основываются, когда гироскоп 1 используется в ходе эксплуатации позднее и/или при другой температуре. Неопределенность в коэффициенте S масштабирования может способствовать неопределенности в смещении B, когда смещение определяется с использованием вышеописанного способа. Неопределенность в коэффициенте S масштабирования, например, может быть одной из наибольших долей в неопределенности в смещении B. В силу этого может быть желательным предоставлять способ определения коэффициента S масштабирования в процессе калибровки, который может выполняться в ходе эксплуатации в то время и/или при той температуре, которая является аналогичной времени и/или температуре, при которой смещение B определяется. Коэффициент S масштабирования, определенный таким образом, может использоваться для того, чтобы повышать точность определения смещения B.
[0107] Коэффициент S масштабирования, например, может определяться посредством использования одного или более способов, раскрытых посредством публикованной PCT-заявки на патент WO2013055253, которая настоящим полностью содержится в данном документе по ссылке. WO2013055253 раскрывает два основных способа определения коэффициента S масштабирования. Первый способ, раскрытый посредством WO2013055253, содержит применение квадратурной вибрации вдоль оси 15 возбуждения узлов. Квадратурная вибрация может применяться посредством добавления модуляции в сигнал 35, который приводит в действие вторую пару исполнительных механизмов 5a, 5b. Квадратурная вибрация может иметь частоту, которая находится за пределами полосы пропускания контура 62 обратной связи, и в силу этого квадратурная вибрация не может обнуляться посредством контура 62 обратной связи. Квадратурная вибрация может обнаруживаться в сигнале 36 обнаружения, который выводится посредством второй пары датчиков 6a, 6b. Сигнал 36 обнаружения может предоставлять вывод, пропорциональный коэффициенту S масштабирования. Сигнал 36 обнаружения может измеряться, и изменения сигнала 36 обнаружения могут использоваться для того, чтобы определять изменения коэффициента S масштабирования.
[0108] Второй способ, раскрытый посредством WO2013055253, содержит применение квадратурной вибрации вдоль оси 13 возбуждения антиузлов. Квадратурная вибрация может применяться посредством добавления модуляции в сигнал 33, который приводит в действие первую пару исполнительных механизмов 3a, 3b. Квадратурная вибрация может иметь частоту, которая находится за пределами полосы пропускания контура 61 обратной связи, и в силу этого квадратурная вибрация не может обнуляться посредством контура 61 обратной связи. Квадратурная вибрация может обнаруживаться в сигнале 34 обнаружения, выводимом посредством первой пары детекторов 4a, 4b. Сигнал 34 обнаружения может предоставлять вывод, пропорциональный коэффициенту S масштабирования. Сигнал 34 обнаружения может измеряться, и изменения сигнала 34 обнаружения могут использоваться для того, чтобы определять изменения коэффициента S масштабирования.
[0109] WO2013055253 также раскрывает дополнительные способы и варьирования первого и второго способов, которые описаны выше. Один или более способов, раскрытых посредством WO2013055253, могут использоваться для того, чтобы определять коэффициент S масштабирования, и значение коэффициента S масштабирования может использоваться для того, чтобы извлекать смещение B.
[0110] Коэффициент S масштабирования, альтернативно, может определяться посредством вращения угла θ в первом направлении и на первой угловой скорости до данного значения θ (например, θ=0 или θ=π/2). Направление вращения угла θ затем может быть изменено на противоположное, и угол θ может вращаться при второй угловой скорости , которая имеет практически идентичную абсолютную величину с первой угловой скоростью.
[0111] В ходе вращения θ, первый и второй управляющие сигналы C1, C2 могут быть связаны с угловой скоростью угла θ и угловой скоростью Ω гироскопа 1 согласно уравнению 17:
 (17)
(17)
[0112] Коэффициент S масштабирования, например, может определяться посредством вращения угла θ на угловой скорости при калибровке =-θC в направлении к углу θ=0 и затем инвертирования вращения угла θ таким образом, что угол θ вращается на угловой скорости при калибровке =θC в направлении от угла θ=0. Уравнение 17 может оцениваться во время непосредственно перед тем, как угол θ достигает нуля. В это время, =Δ1, где Δ1 является небольшим углом, близким к нулю, и =-θC. Вставка этих значений в уравнение 17 и допущение того, что Δ1 является близким к нулю, обуславливает уравнение 18:
 (18)
(18)
[0113] Уравнение 17 также может оцениваться во время сразу после того, как угол θ уходит из нуля. В это время, θ=Δ2, где Δ2 является небольшим углом, близким к нулю, и =θC. Вставка этих значений в уравнение 17 и допущение того, что Δ2 является близким к нулю, обуславливает уравнение 19:
 (19)
(19)
[0114] Углы Δ1 и Δ2, например, могут составлять приблизительно 1°, и угловая скорость θC вращения при калибровке может составлять приблизительно 100° в секунду. В этом случае, разность времен между тем, когда θ=Δ1, и тем, когда θ=Δ2, может составлять приблизительно 20 миллисекунд. За такой период времени, угловая скорость Ω гироскопа 1, коэффициент S масштабирования и смещение B могут считаться постоянными, так что  и
и  . Посредством использования этих допущений и вычитания уравнения 18 из уравнения 19, может извлекаться уравнение для коэффициента S масштабирования. Это уравнение показано ниже в качестве уравнения 20:
. Посредством использования этих допущений и вычитания уравнения 18 из уравнения 19, может извлекаться уравнение для коэффициента S масштабирования. Это уравнение показано ниже в качестве уравнения 20:
 (20)
(20)
[0115] Уравнение 20 в силу этого может использоваться для того, чтобы извлекать коэффициент S масштабирования, который может вставляться в уравнения 15 и 16, чтобы извлекать смещение B. Точность, с которой коэффициент S масштабирования может извлекаться с использованием уравнения 20, может зависеть от стабильности угловой скорости Ω гироскопа 1 в ходе процесса калибровки. Например, если значение угловой скорости Ω гироскопа 1 изменяется приблизительно на 0,025° в секунду между временем, когда θ=Δ1 и когда θ=Δ2, то коэффициент S масштабирования может определяться с точностью приблизительно в 0,01%. Если угловая скорость Ω гироскопа 1 изменяется более чем на 0,025° в секунду в ходе процесса калибровки, то точность, с которой определяется коэффициент масштабирования, может снижаться. Если угловая скорость Ω гироскопа 1 изменяется менее чем на 0,025° в секунду в ходе процесса калибровки, то точность, с которой определяется коэффициент масштабирования, может повышаться.
[0116] В варианте осуществления, период времени между тем, когда θ=Δ1, и тем, когда θ=Δ2, может составлять менее приблизительно 50 миллисекунд (например, приблизительно 20 миллисекунд). За такой период времени, целесообразно ожидать, что угловая скорость Ω гироскопа 1 должна изменяться приблизительно на 0,025° в секунду или менее, и в силу этого коэффициент S масштабирования может извлекаться с точностью приблизительно в 0,01% или менее. В некоторых вариантах осуществления, угловая скорость Ω, которая выводится посредством гироскопа, может отслеживаться, чтобы определять, когда возникает изменение угловой скорости менее чем 0,025° в секунду, и в силу этого когда коэффициент S масштабирования может извлекаться с точностью приблизительно в 0,01% или менее. Случайные варьирования вывода гироскопа могут отслеживаться, и когда случайные варьирования составляют значительно менее 0,025° в секунду, то коэффициент S масштабирования может определяться.
[0117] Способ для извлечения коэффициента S масштабирования, который описан выше (со ссылкой на уравнения 18-20), содержит вращение угла θ в направлении к и от θ=0. Тем не менее, следует принимать во внимание, что угол θ может вращаться в направлении к и от значений θ, отличных от θ=0. Например, угол θ может вращаться в направлении к и от угла θ=π/2. С учетом углов, которые достигнуты прежде и после θ=π/2 и которые находятся близко к θ=π/2, могут извлекаться уравнения, которые являются эквивалентными уравнениям 18 и 19. Посредством расчета разности между двумя уравнениями, может быть найдено уравнение, которое является эквивалентным уравнению 20. Следует принимать во внимание, что такое уравнение должно зависеть от первого управляющего сигнала C1, в отличие от второго управляющего сигнала C2, от которого зависит уравнение 20. Значения первого управляющего сигнала C1 в силу этого могут рассчитываться, чтобы извлекать коэффициент S масштабирования относительно угла θ=π/2.
[0118] В некоторых вариантах осуществления, угол θ может вращаться в направлении к и от значений θ, отличных от θ=0 и θ=π/2. Тем не менее, значения θ=0 и θ=π/2 преимущественно упрощают уравнение 17, поскольку экземпляры sin θ и поскольку θ уменьшаются до 0 или 1. Использование значений θ, отличных от θ=0 и θ=π/2, в силу этого может добавлять сложность в извлечение коэффициента S масштабирования.
[0119] Хотя конкретные варианты осуществления систем 100 управления и компоновки исполнительных механизмов и датчиков 3-6 описаны выше и проиллюстрированы на чертежах, следует принимать во внимание, что другие системы управления могут использоваться для того, чтобы выполнять калибровку гироскопа. Например, в некоторых вариантах осуществления, могут использоваться элементы (например, пьезоэлектрические и/или электростатические элементы), которые могут выступать в качестве датчика или исполнительного механизма. В таких вариантах осуществления, роль элементов может изменяться таким образом, что исполнительный механизм может выступать в качестве датчика или наоборот. Это, например, может обеспечивать возможность изменения элементов, которые возбуждают вибрации, и элементов, которые считывают вибрации в резонансной структуре 2. Это может обеспечивать возможность выполнения нескольких калибровок при том, что различные элементы выполняют различные роли. Результаты нескольких калибровок могут усредняться, что может приводить к усреднению ошибок и может повышать точность калибровки.
[0120] Хотя выше описаны конкретные варианты осуществления изобретения, следует принимать во внимание, что изобретение может быть осуществлено на практике другими способами по сравнению с описанными. Вышеприведенные описания имеют намерение быть иллюстративными, а не ограничивающими. Таким образом, специалистам в данной области техники должно быть очевидным, что модификации описанного изобретения могут быть реализованы без отступления от объема прилагаемой формулы изобретения.
Гироскоп
Гироскоп

