Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к измерительной технике, в частности к способам измерения перемещения транспортных средств с использованием эффекта Доплера для электромагнитных волн.
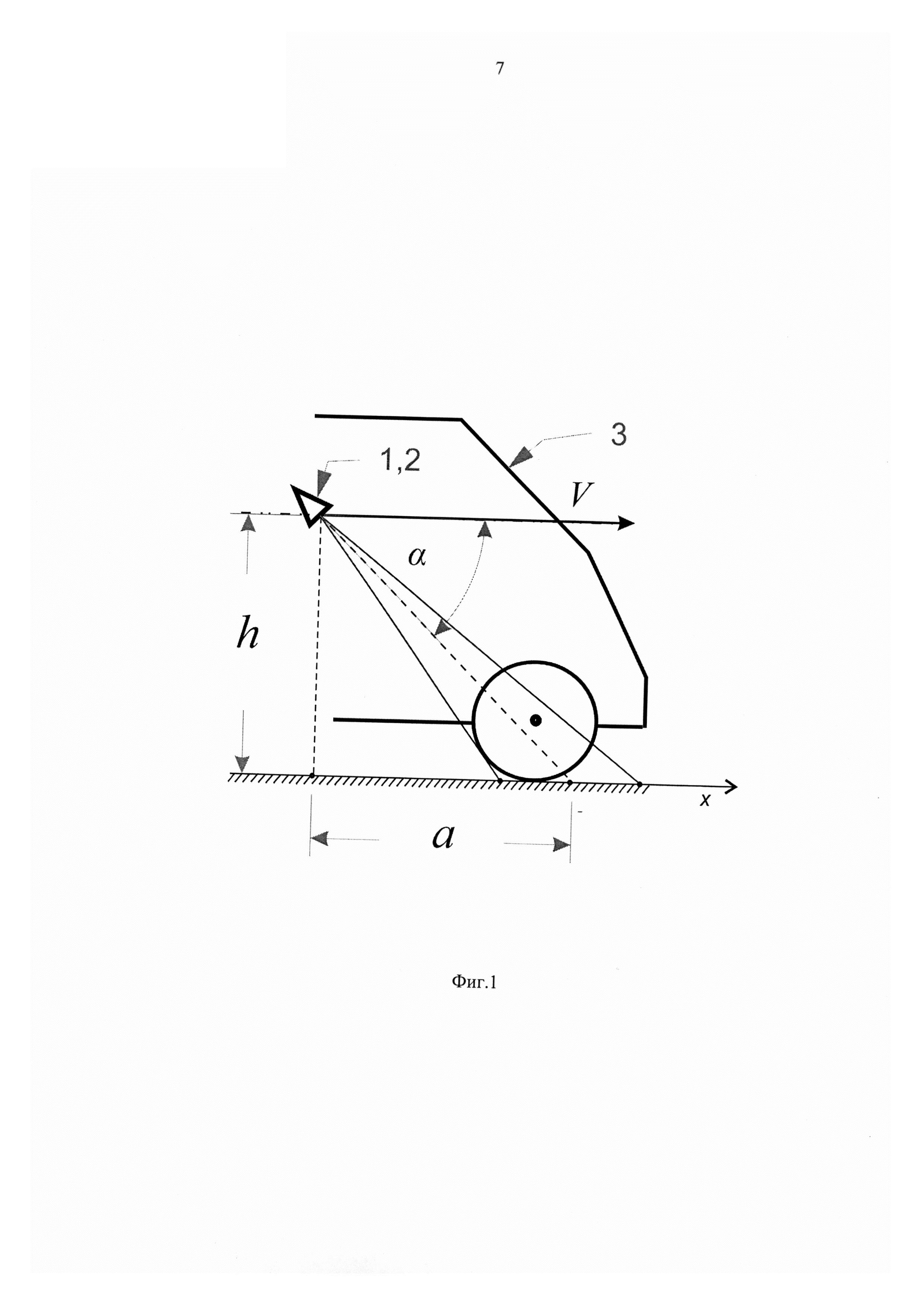
В настоящее время известны и применяются радиоволновые способы измерения перемещения, основанные на эффекте Доплера (Викторов В.А., Лункин Б.В., Совлуков А.С.Радиоволновые измерения параметров технологических процессов. М.: Энергоатомиздат, 1989. 124-132 с). Обычно они применяются в радиолокации для определения скорости и координат движущихся объектов. Также они находят применение для измерения путевой скорости и перемещения автомобилей и железнодорожных составов. В отличие от способов, определяющих перемещение по числу оборотов колеса, как например, в одометрах, радиоволновые доплеровские способы измерения позволяют определять истинную путевую скорость и расстояние, как результат интегрирования скорости по времени, которое не зависит от скольжения, движения при повороте и пробуксовывании, поскольку измерение производится бесконтактно. Доплеровский способ измерения заключается в зондировании движущихся объектов электромагнитными волнами СВЧ диапазона и выделении частоты смещения рассеянной волны. Если источник излучения с фиксированной частотой f0 расположен спереди транспортного средства движущегося со скоростью V и его антенна направлена под углом α между направлением движения и подстилающей поверхностью (см. Фиг. 1), то доплеровская частота fD определится по формуле:

где - длина волны в среде измерения, а ε - ее диэлектрическая проницаемость, которая для воздуха равна единице, с - скорость света в воздухе. Таким образом, измеряя доплеровскую частоту, можно вычислять скорость по формуле:
- длина волны в среде измерения, а ε - ее диэлектрическая проницаемость, которая для воздуха равна единице, с - скорость света в воздухе. Таким образом, измеряя доплеровскую частоту, можно вычислять скорость по формуле:

Поскольку при движении скорость постоянно меняется, то пройденное расстояние S или перемещение за время Т, будет определяться интегралом от мгновенной скорости или доплеровской частоты по времени согласно уравнению: 
При этом обычно fD определяют по максимуму спектральной плотности доплеровского сигнала, что в условиях движения объекта не может гарантировать точной оценки его скорости и перемещения.
Применение описанного способа для измерения перемещения является более точным по сравнению с одометром, хотя он также представляет скорость в одномерном виде. В тоже время, в современных автомобилях предпочтительно получение информации о двух координатном векторе скорости перемещения. Это важно для использования в автономных навигационных системах (например, инерционных), которые в настоящее время предпочитают применять совместно с системами глобального позиционирования (GPS, ГЛОНАСС и др.). Применение для измерения вектора путевой скорости собственно инерционных систем на основе гироскопов и акселерометров затруднено из-за необходимости их размещения точно в центре тяжести транспортного средства, защите хрупких механических деталей от вибраций и повреждений, необходимости проведения частых коррекций ошибок, высокой стоимости. При этом необходимо учитывать большое количество параметров, таких как момент инерции, коэффициент трения, сопротивление воздуха и др. Кроме этого, накопительный характер ошибок в определении координат инерционными системами приводит к их существенному росту при продолжительном отсутствии коррекции.
Наиболее близким по технической сущности является способ измерения путевой скорости и, соответственно, перемещения (RU 2654931 С1, 23.05.2018), принятый за прототип. При осуществлении этого способа, доплеровские СВЧ датчики скорости располагаются по сторонам транспортного средства и их показания обрабатываются совместно (см. Фиг. 2). Это дает возможность измерить вектор путевой скорости за время Δt, необходимое для вычисления модуля вектора скорости и угла его отклонения относительно первоначального положения оси. При этом измерения производятся бесконтактно и не зависят от большого числа параметров, критичных для инерциальных систем. Далее, за счет интегрирования в соответствии с формулой (3) можно рассчитать вектор перемещения и, таким образом определить пройденное расстояние в двумерном пространстве.
Недостатком способа является тот факт, что пройденное расстояние определяется по скорости, зависящей от мгновенного значения доплеровских частот. Эти частоты определяются по максимальному значению спектральной плотности доплеровского сигнала, который может меняться в процессе накопления данных по амплитуде и частоте из-за неравномерности движения, вибрации, неоднородностей отражающей поверхности и др. Это приводит к ошибкам в определении скоростей, которые накапливаются в соответствии с формулой (3) при определении пройденного расстояния.
Техническим результатом настоящего изобретения является повышение точности измерения вектора перемещения транспортного средства.
Технический результат достигается тем, что в способе измерения вектора перемещения, при котором СВЧ волны с длиной волны λ0 излучают с двух сторон транспортного средства шириной l с высоты h над поверхностью под углом α и β к направлению движения в вертикальной и горизонтальной плоскости, принимают отраженные волны, выделяют сигналы D1(t) и D2(t) с доплеровскими частотами на смесителях между излучаемыми и принимаемыми волнами. Дополнительно к этому, подсчитывают число полупериодов длин волн доплеровских частот этих сигналов N1 и N2, затем определяют вектор перемещения транспортного средства за время Δt, модуль L и фазу ϕ которого вычисляют по формулам L=r(N1+N2)sinϕ/(N1-N2) и ϕ=λ0(N1-N2)90°/πtrcos(α)cos(β), где r=l+2hctg(α)tg(β).
На Фиг. 1 представлено расположение сбоку на транспортном средстве одного из двух одинаковых доплеровских датчиков перемещения, реализующих способ.
На Фиг. 2 показано расположение доплеровских датчиков на транспортном средстве сверху при его движении.
На Фиг. 3 поясняется процесс определения вектора перемещения при движении транспортного средства.
На Фиг. 4 показан типичный доплеровский сигнал - а) и его спектральная плотность в нормализованном виде (периодограмма) - б).
На Фиг. 5 показан доплеровский сигнал - а) и импульсы, соответствующие количеству его полупериодов - б).
Антенны каждого из доплеровских датчиков скорости 1 и 2 расположены на боковой стороне транспортного средства 3 на высоте h над поверхностью и направлены под углом α к направлению движения в вертикальной плоскости, как показано на Фиг. 1, и на угол β в горизонтальной, как показано на Фиг. 2. При этом расстояние между ними равно его ширине l. Оба датчика выделяют сигналы D1(t) и D2(f) с доплеровскими частотами fD1 и fD2, пропорциональными радиальной скорости взаимного перемещения датчиков и подстилающей отражающей поверхности. В результате, скорости перемещения мест расположения датчиков V1 и V2 можно определить по формулам:

Если транспортное средство движется по прямой, совпадающей с его осью, то эти скорости будут равны. Если происходит поворот направо, как показано на Фиг. 2. Тогда скорость V1 будет больше V2, а движение будет происходить по окружности с радиусом R, проходящей через центр транспортного средства. При этом центры левого и правого следов диаграмм направленности антенн датчиков (см. заштрихованные области на Фиг. 2) будут перемещаться по радиусам R + r/2 и R - r/2, где r - расстояние между ними. При этом за некоторый дискретный i-ый одинаковый период времени Т=Δt, перемещения этих проекций по подстилающей поверхности будут определяться выражениями

где Ri, и ωi - текущий радиус и угол поворота транспортного средства (см. Фиг. 3), которые определяются из решения этой системы уравнений (5):

Поскольку, длина хорды Li=2Ri sin(ωi/2), а ϕi=ωi/2, то с учетом (6), получим выражение для вектора перемещения:{Li,ϕi}:

Расстояние r можно вычислить из формул решения прямоугольных треугольников (см. Фиг. 1 и Фиг. 2):

где а - расстояние между проекцией датчика на поверхность и центром следа диаграммы направленности его антенны на поверхность в вертикальной плоскости (см. Фиг. 1), b -расстояние между центром следа от диаграммы направленности антенны датчика на поверхности и направлением движения в горизонтальной плоскости (см. Фиг. 2). Если при этом перемещения датчиков S1i, и S2i измерять обычным способом, интегрируя скорости по времени (3), то результат будет не точный. За время интегрирования Δt доплеровские сигналы могут меняться как по частоте, так и по амплитуде из-за неравномерного движения, вибрации, неоднородных отражающих свойств дороги и т.д. Это показано на Фиг. 4а и 4б, где изображен реальный сигнал D(t) и его спектральная плотность в нормализованном виде (периодограмма). Видно, что определить точно максимум спектральной плотности накопленного за время Δt сигнала не представляется возможным. В тоже время, если подсчитать число полупериодов сигнала D(t) за время Δt - N(t) (см. Фиг. 5а и 5б), то пройденный путь можно определить по формуле

с дискретной ошибкой  .
.
Таким образом, формулы (6), с учетом подсчета числа полупериодов сигналов D1(t) и D2(t) и формулы (7) можно преобразовать в выражение для текущего состояния вектора перемещения

где r определяется по формуле (8). Маршрут перемещения транспортного средства при этом будет складываться из всех измеренных векторов перемещения согласно формулам
yi=L1 cosϕ1+L2 cos(w1+ϕ2)+…+Li-1cos(w1+w2+…+ϕi-1)
xi=L1sin ϕ1+L2 sin(w1+ϕ2)+…+Li-1 sin(w1+w2+…+ϕi-1)
Таким образом, прямое вычисление пути по перемещениям без процесса определения доплеровской частоты после спектральной обработки с последующим интегрированием повышает точность определения перемещения.
Способ измерения вектора перемещения, при котором СВЧ волны с длиной волны λ излучают с двух сторон транспортного средства шириной l с высоты h над поверхностью под углом α и β к направлению движения в вертикальной и горизонтальной плоскостях, принимают отраженные волны, выделяют сигналы D(t) и D(t) с доплеровскими частотами на смесителях между излучаемыми и принимаемыми волнами, отличающийся тем, что подсчитывают число полупериодов длин волн доплеровских частот этих сигналов N и N, затем определяют вектор перемещения транспортного средства за время Δt, модуль L и фазу ϕ которого вычисляют по формулам L=r(N+N)sin(ϕ)/(N-N) и ϕ=λ(N-N)90°/πrcos(α)cos(β), где r=l+2hctg(α)tg(β).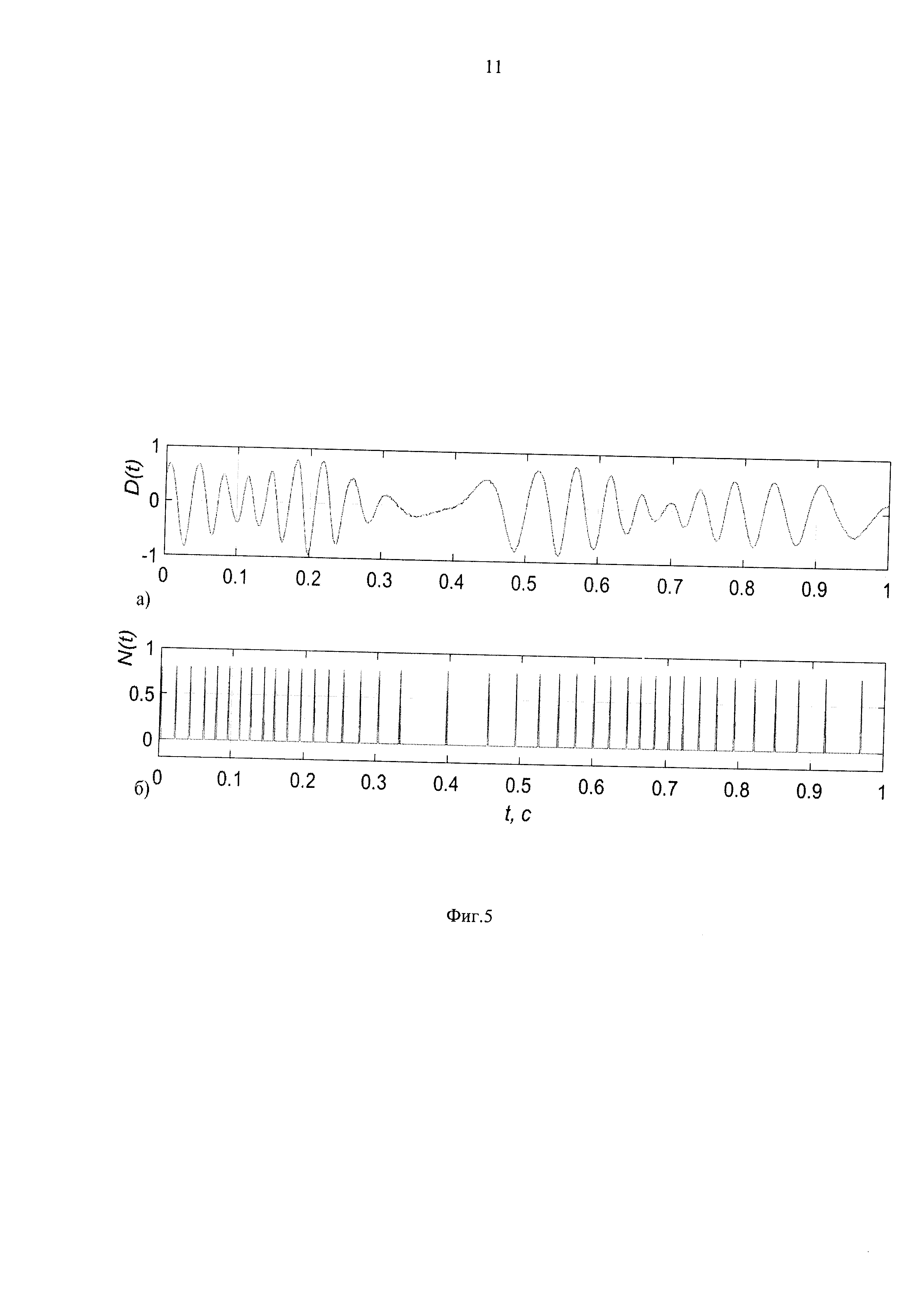
Устройство для распознавания степени научности опубликованных построений
Спецпроцессор для задачи выполнимости булевых формул
Перистальтический насос на пьезоэлектрических элементах
Устройство для измерения дифференциального тока
Способ измерения количества вещества в металлической емкости
Способ определения количества диэлектрической жидкости в металлической емкости
Устройство преобразования механической энергии движения водной среды в электрическую энергию
Способ определения уровня жидкости в емкости
Устройство для измерения толщины покрытий
Способ измерения положения границы раздела двух сред в емкости
Измеритель вектора перемещения транспортного средства

