Результат интеллектуальной деятельности: Способ оценки точности трехкоординатного управления
Вид РИД
Изобретение
Изобретение относится к области моделирующих устройств, которые следует рассматривать как учебные или тренировочные устройства, вызывающие у обучающихся ощущения, идентичные ощущениям, возникающим при обращении с реальными устройствами, отличающиеся обеспечением записи или измерения характеристик обучаемого.
В настоящее время известны способы проведения психофизиологических исследований, направленные на измерение скорости и точности зрительно-моторного слежения человеком, основанные на демонстрации испытуемому динамических виртуальных мишеней и измерении времени задержки и упреждения реакции в виде нажатий испытуемым клавиш манипулятора при совпадении динамической мишени и цели. Однако, имеющиеся способы позволяют в полной мере оценить лишь точность зрительно-моторного слежения за объектом, одновременно перемещающимся в двух координатах по простой траектории. Наряду с этим, при проведении психофизиологических исследований в процессе обучения операторов технологических машин, таких как валочно-пакетирующие машины, валочно-сучкорезно-раскряжевочные машины, форвардеры и др. крайне важным является оценка точности именно трехкоординатного управления. Оператор, осуществляющий управление реальным технологическим оборудованием, например, при наведении захватно-срезающего устройства валочно-пакетирующей машины на дерево осуществляет дистанционное управление перемещеним захватно-срезающего устройства одновременно в трех координатах – осуществляя управление телескопическим устройством стрелы, поворотом стойки стрелы и углом перелома стрелы. Низкая точность трехкоординатного управления в данном случае приводит к высокому износу узлов технологического оборудования – шарнирных соединений, гидравлических цилиндров и рукавов высокого давления, поскольку задержки или упреждение реакций оператора, неточная оценка положения рабочего органа в пространстве создает в указанных узлах в граничных условиях высокие механические напряжения.
Известен способ отбора для занятий единоборствами [1], при котором испытуемому предъявляют на экране видеомонитора окружность, на которой помещена метка и точечный объект, движущийся по окружности. Испытуемый, наблюдая за движением точечного объекта, в момент предполагаемого совпадения его положения с меткой нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Испытуемый выполняет описанную процедуру заданное число раз, после чего строят вариационный ряд ошибок несовпадения точечного объекта и метки, вычисляют вариационный размах ряда и отмечают на числовой оси отрезок, ограниченный наибольшим и наименьшим членами вариационного ряда. Способ позволяет оценить быстроту и точность двигательных действий испытуемого, тем самым повысить достоверность отбора подростков для занятий единоборствами за счет инструментальных исследований.
Известен способ определения времени реакции человека на движущийся по направлению от него объект [2], при котором испытуемому предъявляют на экране видеомонитора замкнутый контур, являющийся ограничивающим, внутри которого расположен тестовый объект аналогичной конфигурации. Тестовый объект увеличивают соответственно заданной скорости, имитируя движение его навстречу испытуемому. В момент предполагаемого совпадения размеров ограничивающего замкнутого контура и тестового объекта испытуемый нажатием кнопки «Стоп» останавливает увеличение диаметра тестового объекта. Затем вычисляют ошибку несовпадения диаметров тестового объекта и ограничивающего контура - время ошибки запаздывания с положительным знаком или упреждения - с отрицательным знаком и заданное время вновь предъявляют испытуемому замкнутый контур, внутри которого расположен тестовый объект начальных размеров и конфигурации. Затем вычисляют время реакции Tp человека на движущийся объект как среднеарифметическое значение по формуле:
 ,
,
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным, знаком, мс; n - количество испытаний, при этом замкнутый контур одновременно с увеличением тестового объекта уменьшают в диаметре с заданной скоростью, затем уменьшение диаметра замкнутого контура останавливают нажатием кнопки «Стоп», а затем через заданное время предъявляют испытуемому замкнутый контур начального размера.
Известен способ оценки зрительно-моторной реакции на движение объекта в пространстве [3], при котором испытуемый визуально наблюдает движущийся объект и реагирует на прохождение объекта через «финишный створ» нажатием на кнопку, причем в качестве объекта наблюдения используют движущийся по желобу металлический шарик, проходящий последовательно через два индукционных датчика, первый - запускающий электросекундомер и второй, расположенный на уровне «финишного створа», останавливающий секундомер в момент его прохождения, устанавливая стандартное время прохождения шариком расстояния между двумя датчиками, затем второй индукционный датчик отключают, а испытуемый останавливает секундомер в момент визуального прохождения шариком «финишного створа», нажимая на кнопку.
Известен способ определения способности к предвидению хода событий [4], при котором путем испытуемому на экране видеомонитора предъявляют окружность, на которой помещена метка и точечный объект. Точечный объект движется с заданной скоростью по окружности, за заданное время до достижения метки исчезает с экрана видеомонитора, при этом движение точечного объекта по окружности продолжается. В момент предполагаемого совпадения положения движущегося точечного объекта с метким испытуемым нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности и точечный объект снова появляется на экране видеомонитора, в том месте, где было остановлено его движение. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Описанную процедуру повторяют заданное число раз, после чего вычисляют способность к прогнозированию положения движущегося объекта относительно метки Тпрог как среднеарифметическое значение по формуле:
 ,
,
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным знаком, мс; n - число остановок точечного объекта в области положения метки.
Недостатком известных способов являются их низкие технологические возможности, поскольку они позволяют измерять время реакции испытуемого на подвижные объекты и определять соотношения процессов возбуждения и торможения в коре головного мозга при осуществлении простой сенсомоторной реакции. Однако, в процессе человеческой деятельности (в том числе, производственной деятельности) выполняются более сложные психомоторные реакции, связанные с определением местонахождения объекта и совершением целенаправленной двигательной реакции. Данные психомоторные реакции могут быть нарушены в результате различных нейродегенеративных заболеваний или травм и эффективность их выполнения необходимо оценивать в процессе медицинской или профессиональной реабилитации пациента, что невозможно при помощи известных способов.
Наиболее близким по технической сущности к предъявляемому способу является способ оценки уровня функционального состояния центральной нервной системы человека на основе измерения времени ориентировочной зрительно-моторной реакции человека [5], при котором человеку предъявляют зрительный стимул, красный круг диаметром 20 мм, который визуально определяет его место появления; подводят курсор компьютерной мышки к его границам, измеряют время от момента появления стимула до подведения курсора к его границе, процедуру повторяют не менее 50 раз; на основе измеренных значений времени реакции строится гистограмма их распределения по разрядам с интервалом в 20 мс, по параметрам анализа гистограммы распределения времени реакции человека определяется значение моды - Мо и амплитуды моды - AMo, затем рассчитывается величина уровня функционального состояния ЦНС (УФСцнс) по формуле:
 ,
,
где  - среднее значение; Кв – коэффициент вариации; Мо - середина разряда гистограммы, имеющего максимальную частоту; АМо - амплитуда моды в % - максимальная относительная частота гистограммы;
- среднее значение; Кв – коэффициент вариации; Мо - середина разряда гистограммы, имеющего максимальную частоту; АМо - амплитуда моды в % - максимальная относительная частота гистограммы;  - вариационный размах; ln – натуральный логарифм; и далее определяют по величине рассчитанного показателя уровень функционального состояния ЦНС, причем при значении УФСцнс больше 24,57 уровень функционального состояния будет оцениваться как оптимальный, при УФСцнс от 24,56 до 18,53 - как сниженный и при УФСцнс меньше 18,52 - как существенно сниженный.
- вариационный размах; ln – натуральный логарифм; и далее определяют по величине рассчитанного показателя уровень функционального состояния ЦНС, причем при значении УФСцнс больше 24,57 уровень функционального состояния будет оцениваться как оптимальный, при УФСцнс от 24,56 до 18,53 - как сниженный и при УФСцнс меньше 18,52 - как существенно сниженный.
Недостатком данного способа является отсутствие возможности оценивать точность реализуемых моторных программ испытуемым, поскольку оценивается только время между появлением стимула и реализацией моторной программы. Это, безусловно, дает представление об уровне функционального состояния центральной нервной системы человека, однако, для оценки точности трехкоординатного управления как профессионально-важного качества операторов в задачах профессиональной подготовки необходимо измерять дополнительно точность реализуемых моторных программ одновременно в трех пространственных координатах.
Технический результат предлагаемого решения проявляется в повышении точности оценки наведения управляемого объекта.
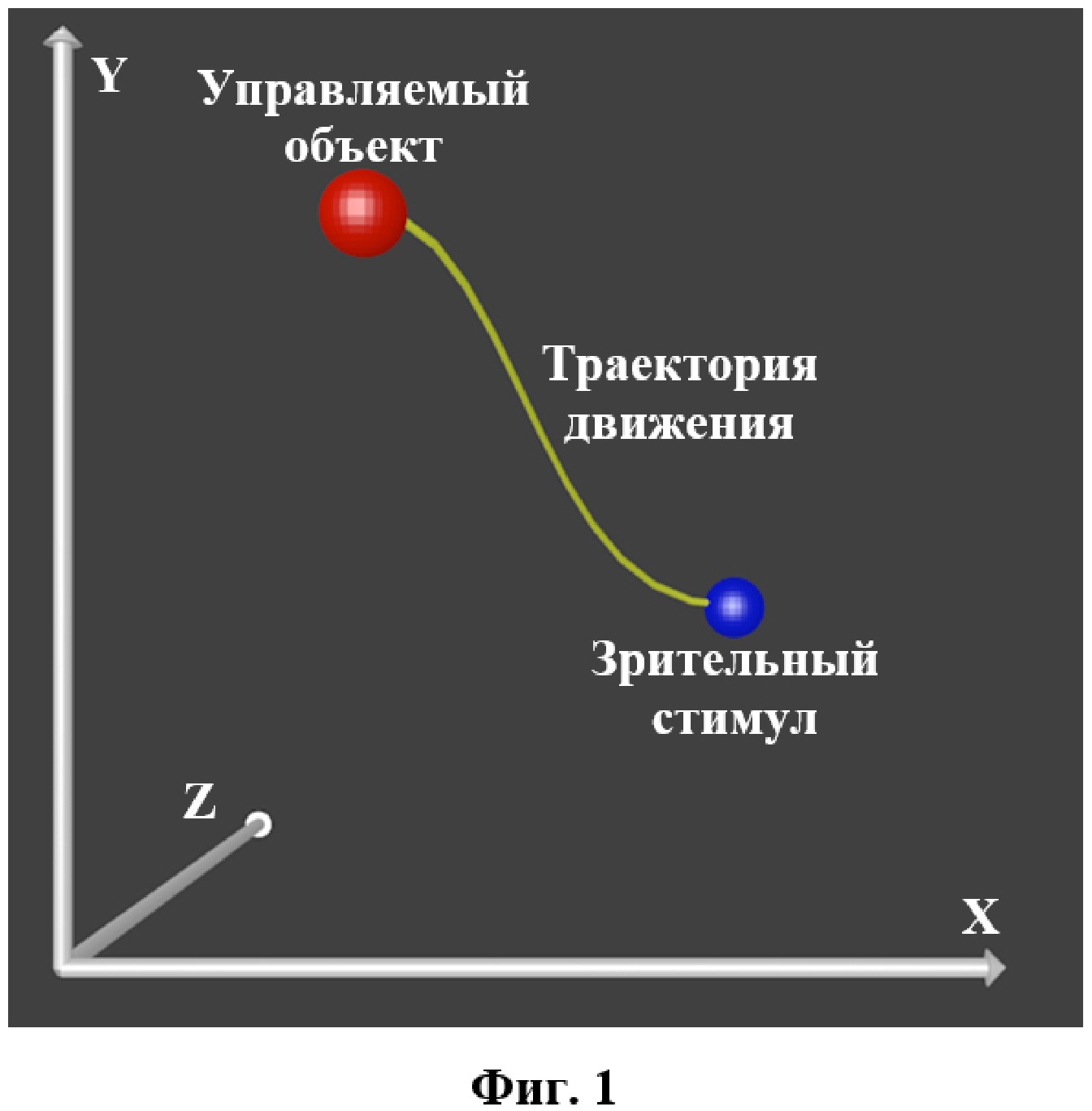
Указанный технический результат достигается тем, что испытуемому на экране видеомонитора предъявляют зрительный стимул в трехкоординатной плоскости, синий объемный шар диаметром заданного размера с отмеченным центром, хаотично смещенный относительно начала координат по каждой их осей – X, Y и Z, место появления которого визуально определяет испытуемый, а также управляемый объект в виде красного шара диаметром заданного размера с отмеченным центром,
причем новым является то, что испытуемый с помощью двух двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении, находящимися в руках испытуемого управляет движением управляемого объекта по предложенной траектории в трех плоскостях одновременно, и совмещает центры зрительного стимула и управляемого объекта, а в момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между центрами зрительного стимула и прицела в момент нажатия кнопки «Готов», после чего тест повторяют заданное количество раз и вычисляют время реализации моторного слежения Тмс по формуле:
 ,
,
где ti – время, затраченное на прохождение i-го испытания, с., n - количество испытаний,
точности реализации программы моторного слежения Емс по формуле:
 ,
,
где еi – ошибка наведения прицела в i-м испытании, пункты; n - количество испытаний.
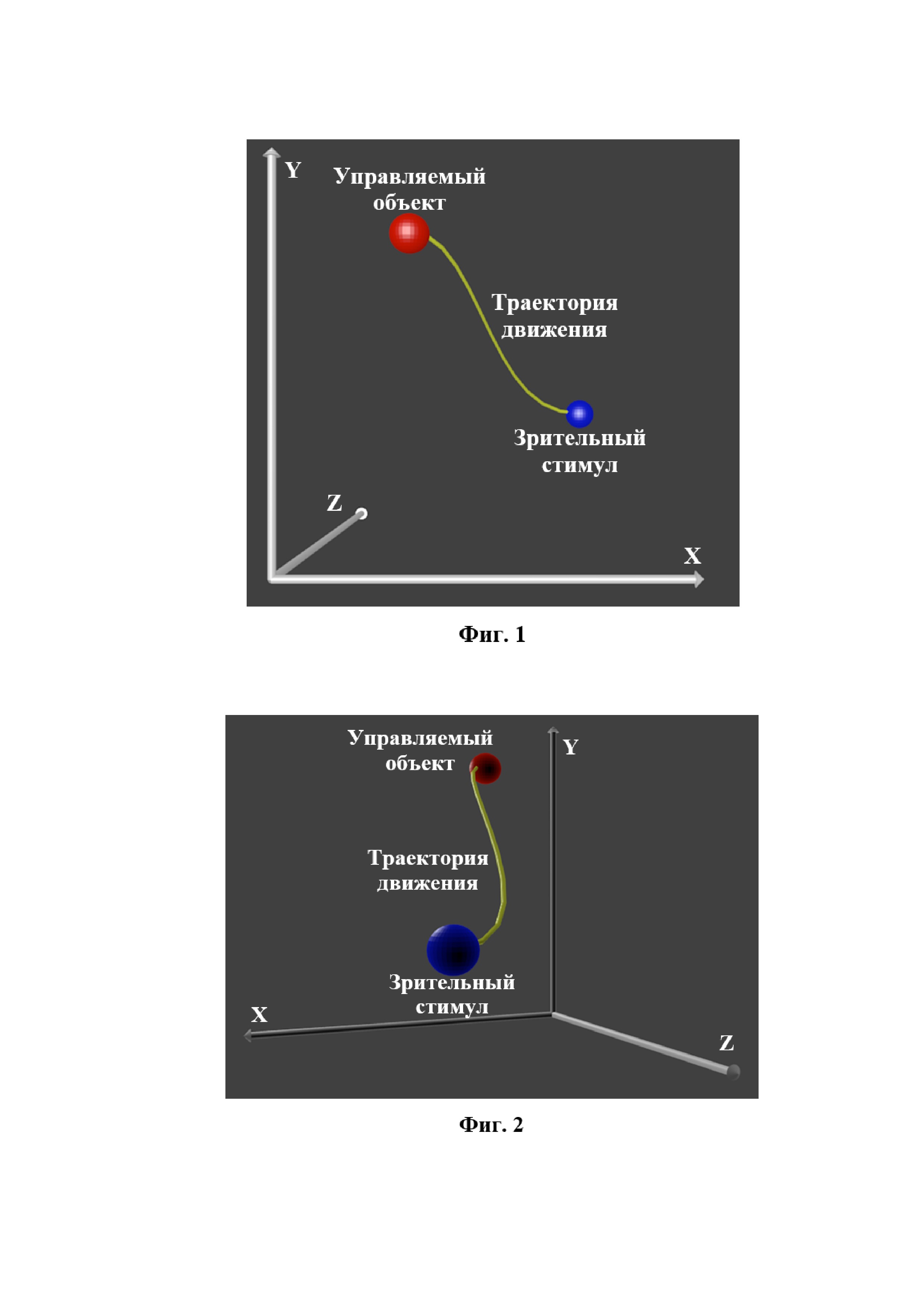
На фиг. 1 представлено схематическое изображение экрана видеомонитора испытуемого при наведении прицела на зрительный стимул.
На фиг. 2 представлено изображение, поясняющее принцип случайного позиционирования объектов в трехмерном пространстве.
Предлагаемый способ оценки точности трехкоординатного управления осуществляется следующим образом.
На первом этапе в центре экрана видеомонитора испытуемого отображают зрительный стимул, управляемый объект и желаемую траекторию движения управляемого объекта, руки испытуемого располагаются на рукоятях двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении.
На втором этапе при нажатии испытуемым на манипуляторе кнопки «Готов» автоматизировано начинают отсчет времени выполнения теста и разрешают движение управляемого объекта синхронно с движениями рукоятей манипуляторов, причем перемещению управляемого объекта по горизонтальной оси X соответствует отклонение рукояти, находящейся в правой руке испытуемого, по оси Х, перемещению управляемого объекта по вертикальной оси Y соответствует отклонение рукояти, находящейся в правой руке испытуемого, по оси Y, перемещению управляемого объекта по оси глубины Z соответствует отклонение рукояти, находящейся в левой руке испытуемого, по оси Y.
На третьем этапе испытуемый реализует программу трехкоординатного управления, как можно скорее и как можно точнее следуя по желаемой траектории и совмещая центры зрительного стимула и управляемого объекта путем отклонения рукоятей манипуляторов. При этом на экране видеомонитора в режиме реального времени отображают положение управляемого объекта, соответствующее отклонению рукоятей джойстиков.
На четвертом этапе после наведения управляемого объекта на зрительный стимул испытуемый нажимает кнопку манипулятора «Готов», после чего заканчивают отсчет времени, затраченного испытуемым на реализацию программы трехкоординатного управления и вычисляют ошибку наведения управляемого объекта, равную расстоянию в пунктах от центра прицела до центра зрительного стимула, после чего тест повторяют с первого этапа заданное количество раз.
На пятом этапе вычисляют эффективность зрительно-моторного слежения в виде интегрального показателя скорости моторного слежения Тмс и точности моторного слежения Емс соответственно по формулам:
,
где ti – время, затраченное на прохождение i-го испытания, с.; n - количество испытаний,
,
где еi – ошибка наведения прицела в i-м испытании, пункты, n - количество испытаний.
Предлагаемый способ оценки точности трехкоординатного управления позволяет расширить функциональные возможности способов за счет измерения интегральных показателей времени и точности трехкоординатного управления оператором подвижными объектами в процессе профессиональной подготовки операторов на различных ее этапах.
Литература:
1. Патент № 2540164 РФ A61B5/16. Способ отбора для занятий единоборствами // Мамаева А.В. (РФ), Закамский А.В. (РФ), Полевщиков М.М. (РФ), Роженцов В.В. (РФ). Заявка: 2013148546/14, 30.10.2013 Опубл. 10.02.2015, Бюл. № 4.
2. Патент № 2497452 РФ A61B5/16. Способ определения времени реакции человека на движущийся по направлению от него объект // Курасов П.А. (РФ), Петухов И.В. (РФ). Заявка: 2012104099/14, 06.02.2012 Опубл. 20.08.2013, Бюл. № 23.
3. Патент № 2525638 РФ A61B5/16. Способ оценки зрительно-моторной реакции на движение объекта в пространстве // Левашов О.В. (РФ), Павлов С.Ф. (РФ). Заявка 2013124413/14, 28.05.2013 Опубл. 20.08.2014, Бюл. № 23.
4. Патент № 2381742 РФ A61B5/16. Способ определения способности к предвидению хода событий // Петухов И.В. (РФ). Заявка: 2008146586/14, 25.11.2008 Опубл. 20.02.2010, Бюл. № 5.
5. Патент №2573340 РФ A61B5/16. Способ оценки уровня функционального состояния центральной нервной системы человека на основе измерения времени ориентировочной зрительно-моторной реакции человека // Царев А.Н. (РФ). Заявка 2014117131/14, 29.04.2014 Опубл. 20.01.2016, Бюл. № 2.


Декоративные пиломатериалы из горбылей
Устройство для производства арболита
Способ создания смешанных лесных культур дуба черешчатого с использованием сеянцев с закрытой корневой системой
Способ определения изменений термического сопротивления и коэффициента теплопроводности по толщине наружного стенового ограждения по результатам теплофизических испытаний в натурных условиях
Измерительный комплекс контроля теплотехнических параметров наружной стены при длительных режимах испытаний в натурных условиях
Система дистанционного зондирования трансионосферного распространения радиоволн для метеорной радиосвязи
Устройство для сортировки древесных материалов по смолистости
Амфибийная транспортно-технологическая платформа
Способ для выявления асимметрий движений
Способ определения скорости и интенсивности старения асфальтобетонов
Способ подготовки операторов транспортеров-погрузчиков

