Результат интеллектуальной деятельности: Способ компенсации влияния медленного меандра на показания лазерного гироскопа
Вид РИД
Изобретение
Изобретение относится к приборостроению и измерительной технике и может быть использовано для повышения точности показаний лазерного гироскопа (ЛГ) в условиях возможных возникновений динамических зон захвата и температурных изменений амплитуды периодической низкочастотной подставки.
Возникновение динамических зон захвата в ЛГ с периодической частотной подставкой было впервые описано в работе [Курятов В.Н., Ланда П.С., Ларионцев Е.Г. Частотные характеристики кольцевого лазера на колеблющейся подставке // Изв. Вузов, Сер. Радиофизика. 1968. Т.П. С. 1839].
Известен способ повышения точности показаний измерительных осей датчиков угловых перемещений в лазерном гироскопе путем введения существенно более низкочастотной периодической частотной подставку, так называемый «медленный меандр», что позволяет, в частности, по данным климатических испытаний лазерного гироскопа на множестве значений температур учитывать и влияние температурных воздействий.
Для повышения точности измерений используется также способ «ошумления», согласно которому вместо сигнала медленного меандра вводится десинхронизирующий шумовой сигнал [Ю.Д. Голяев, Г.И. Телегин, К.А. Толстенко, С.О. Яременко. Случайная ошибка кольцевого лазера со знакопеременной частотной подставкой и шумовым десинхронизирующим сигналом. Лазерная техника и оптоэлектроника. 1990, 4 (56), с. 17-23].
Недостатком этого способа является относительно низкая точность измерений, вызванная тем, что из-за несинхронность шумовой составляющей сигнала относительно сигнала частотной подставки, на каждом реверсе моды и на последнем такте работы ЛГ возникает ошибка, влияющая на результирующий накопленный угол.
Наиболее близким по технической сущности к предложенному является способ, согласно которому при проведении измерений и обработке их результатов производят компенсацию влияния медленного меандра путем его вычитания в виде константы, постоянной на всем протяжении работы ЛГ [Ю.Ю. Колбас, М.Е. Грушин, В.Н. Горшков. Немагнитная составляющая смещения нуля зеемановского лазерного гироскопа. Квантовая электроника. 2018, 48 (3), 283-289].
Недостатком наиболее близкого технического решения является относительно низкая точность компенсации, вызванная тем, что при его использовании невозможно учесть температурные изменения амплитуды сигнала медленного меандра и нетемпературные изменения амплитуды подставки, например, при выбеге датчика сразу после запуска лазерного гироскопа.
Задачей изобретения является разработка способа, позволяющего повысить точность компенсации в результатах измерений ошибок, вызванных температурными изменениями амплитуды сигнала медленного меандра и нетемпературными изменениями амплитуды подставки, например, при выбеге датчика сразу после запуска лазерного гироскопа.
Требуемый технический результат заключается в повышении точности компенсации ошибок в результатах измерений путем учета температурных изменений амплитуды сигнала медленного меандра и нетемпературных изменений амплитуды подставки, например, при выбеге показаний лазерного гироскопа сразу после запуска гироскопа.
Поставленная задача решается, а требуемый технический результат достигается тем, что, в способе компенсации влияния медленного меандра на показания измерительных осей датчиков угловых перемещений в трехосном лазерном гироскопе, заключающемся в том, что, проводят компенсацию влияния медленного меандра на показания лазерного гироскопа, согласно изобретению, по данным климатических испытаний лазерного гироскопа на множестве значений температур определяют коэффициент АМода01 на каждой моде:
где: ММсрМода01 - среднее значение медленного меандра на температуре Т на определенной моде, ScрTMода01 - среднее значение частотной подставки на температуре Т на определенной моде, затем, по данным, полученным для диапазона температур в процессе климатических испытаний, определяют коэффициенты полинома n-ой степени зависимости коэффициента А(Т)0Mода01 от температуры на определенной моде
А(Т)Мода01=А0Мода01+А1Мода01⋅Т+А2Мода01⋅Т2+…+АnМода01⋅Тn,
на каждом такте работы лазерного гироскопа определяют текущее значение амплитуды медленного меандра ММ=А(Т)Мода01⋅Sтек, где Sтек - текущее значение амплитуды частотной подставки, которую измеряют на каждом такте работы лазерного гироскопа, определяют показатели токового дрейфа Tdsqx,y,z и магнитного дрейфа Mdsqx,y,z после чего определяют значения угла поворота за такт работы лазерного гироскопа в радианах
Ωx,y,z=Kqx,y,z⋅(Rasn+MM)-(Tdsqx,y,z+Mdsqx,y,z),
где Kqx,y,z - масштабный коэффициент лазерного гироскопа, Rasn - выходная характеристика лазерного гироскопа.
На чертеже представлены:
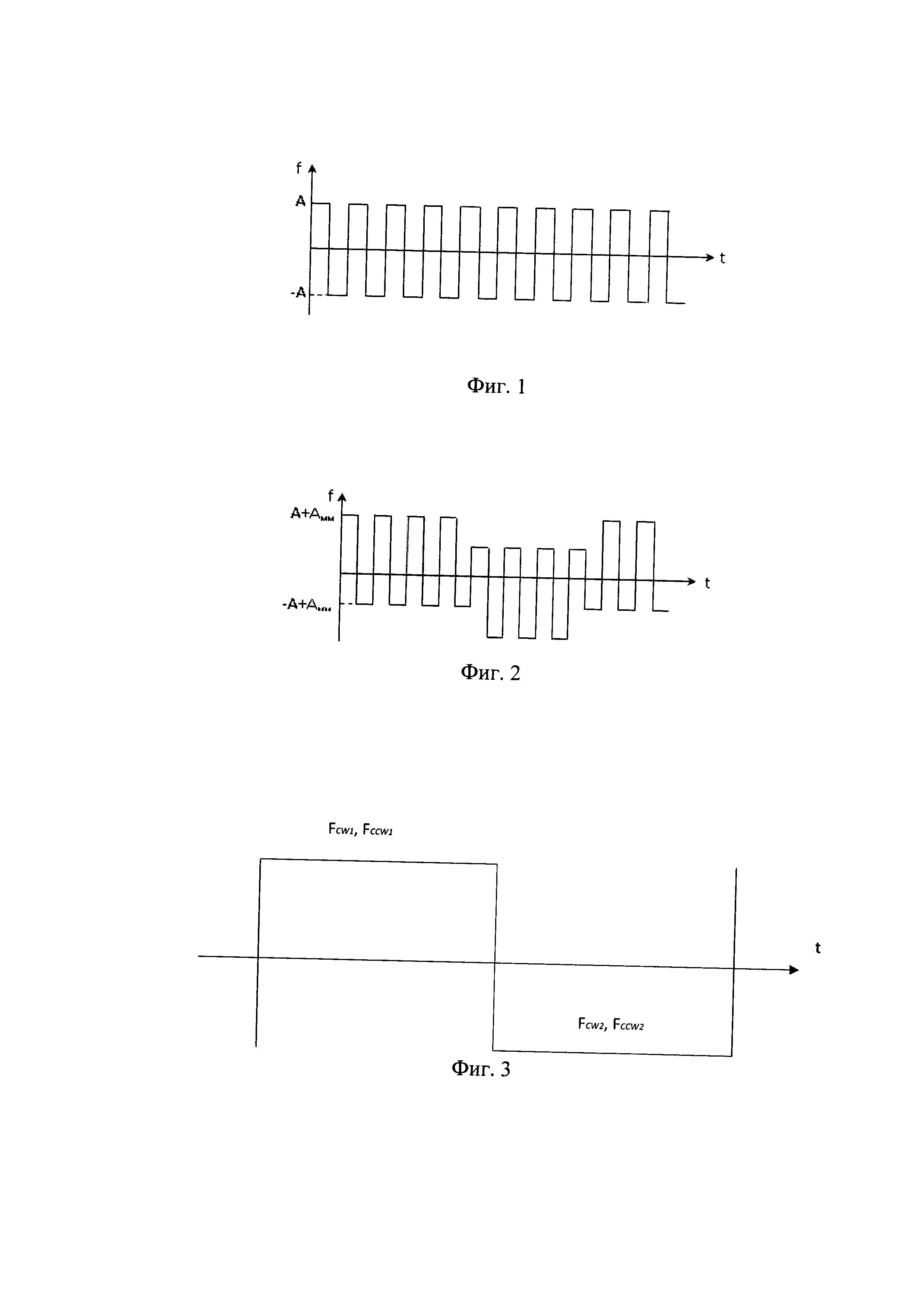
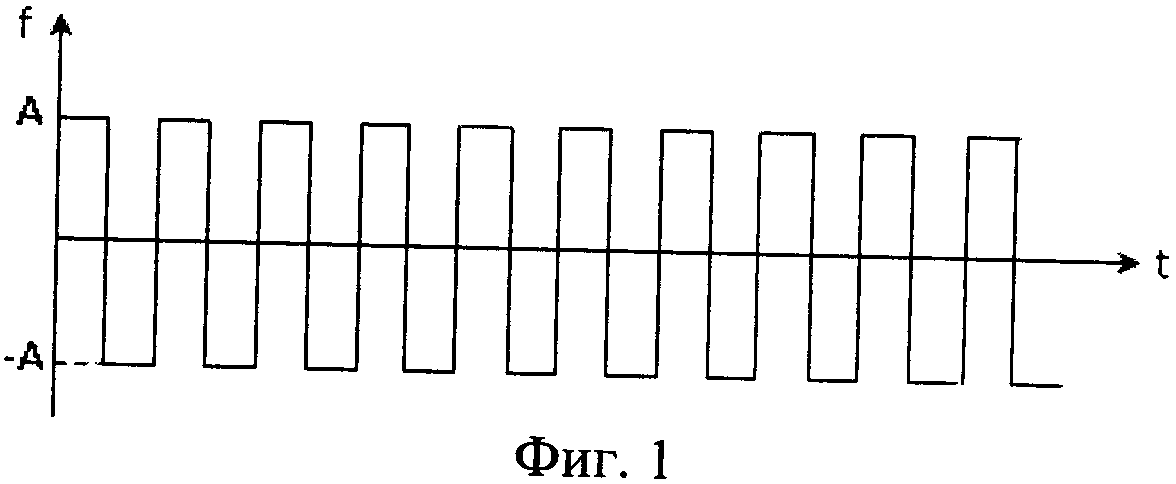
на фиг. 1 - сигнал периодической частотной подставки;
на фиг. 2 - сигнал периодической частотной подставки с медленным меандром;
на фиг. 3 - один период частотной подставки;
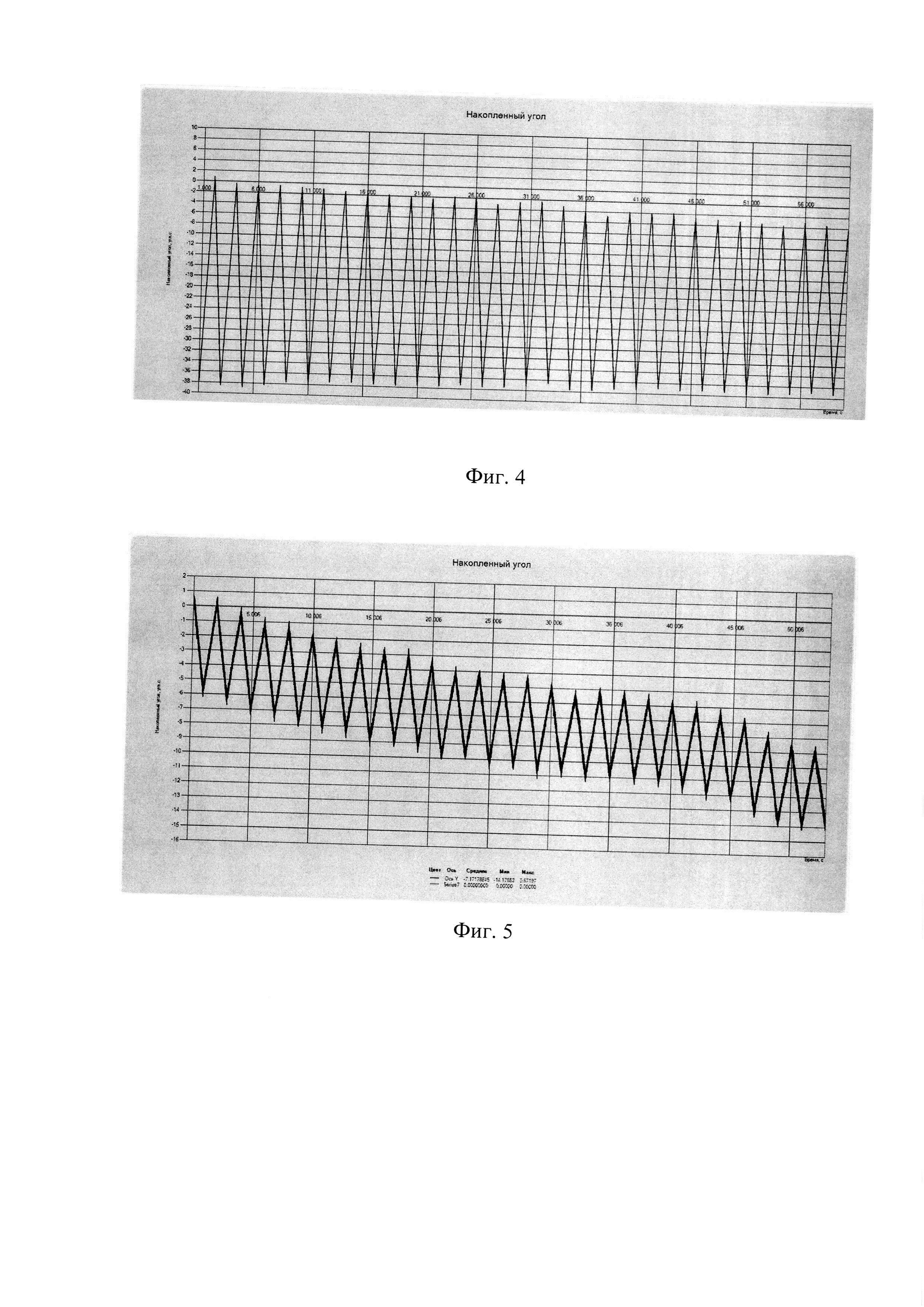
на фиг. 4 - накопленный угол (работа ЛГ с большим выбегом при использовании способа компенсации медленного меандра - путем вычитания константы);
на фиг. 5 - накопленный угол (работа ЛГ с большим выбегом при использовании предложенного способа).
Способ компенсации влияния медленного меандра на показания лазерного гироскопа реализуется следующим образом.
Так как частота съема данных лазерного гироскопа гораздо выше частоты медленного меандра, в вычислителе ЛГ необходимо вычитать (компенсировать) амплитуду медленного меандра из полученных показаний датчиков угловых перемещений осей показаний.
В аналогах предложенного способа для этого применялась константа амплитуды медленного меандра, которую вычитали на каждом такте работы ЛГ. Однако, при этом невозможно учесть текущие температурные изменения амплитуды сигнала медленного меандра и нетемпературные изменения амплитуды подставки, например, при выбеге датчика сразу после запуска гироскопа.
Предложенный способ решает эту проблему, учитывая истинное изменение частотной подставки.
Для реализации предложенного способа необходимо знать истинное значение частотной подставки на каждом такте съема показаний лазерного гироскопа. Для его получения вычислитель лазерного гироскопа использует данные вращения за каждый полупериод переключения частотной подставки.
На фиг. 3 представлен один период частотной подставки, где обозначены:
FCW1 - показания лазерного гироскопа при вращении по часовой стрелке на первом полупериоде частотной подставки;
FCCW1 - показания лазерного гироскопа при вращении против часовой стрелки на первом полупериоде частотной подставки;
FCW2 - показания лазерного гироскопа при вращении по часовой стрелке на втором полу периоде частотной подставки;
FCCW2 - показания лазерного гироскопа при вращении против часовой стрелки на втором полупериоде частотной подставки.
Истинное значение амплитуды частотной подставки определяют из соотношения:
S=(Fcw1-Fccw1)-(Fcw2-Fccw2)
Зная истинное, независимое от вращения, значение амплитуды частотной подставки на каждом такте, представляется возможным учесть изменение амплитуды частотной подставки при коррекции амплитуды медленного меандра.
Для этого, по данным климатических испытаний лазерного гироскопа на множестве значений температур определяют коэффициент АМода01 на каждой моде:
где:
ММсрМода01 - среднее значение медленного меандра на температуре Т на определенной моде;
SсрTMода01 - среднее значение частотной подставки на температуре Т на определенной моде.
Затем, по данным, полученным на всех температурах в процессе климатических испытаний, находят коэффициенты полинома n-ой степени зависимости коэффициента А(Т)Мода01 от температуры на определенной моде:
A(Т)мода01=A0Мода01+A1Мода01⋅Т+А2Мода01⋅Т2+…+АnМода01⋅Тn
Полученные коэффициенты вносят во внутреннюю долговременную память вычислителя лазерного гироскопа и используют для коррекции значения амплитуды медленного меандра.
На каждом такте работы лазерного гироскопа рассчитывается текущее значение амплитуды медленного меандра ММ по формуле:
MM=A(T)Мода01⋅Sтек,
где:
А(Т)Мода01 - коэффициент температурной зависимости амплитуды медленного меандра от амплитуды частотной подставки (из-за низкой относительно частоты съема данных скорости изменения температуры рассчитывать данный коэффициент на каждом такте работы программы нецелесообразно, расчет производят один раз в несколько секунд);
Sтек - текущее значение амплитуды частотной подставки, которую рассчитывают на каждом такте работы трехосного лазерного гироскопа (для увеличения точности на данное значение целесообразно накладывать бегущий фильтр с окном в несколько секунд).
Далее, полученное значение ММ применяют для расчета значение угла поворота за такт работы датчика угловых перемещений в радианах по формуле:
Ωx,y,z=Kqx,y,z⋅(Rasn+MM)-(Tdsqx,y,z+ Mdsqx,y,z)
где:
Kqx,y,z - масштабный коэффициент датчика угловых перемещений;
ММ - значение амплитуды медленного меандра с учетом знака фазы медленного меандра;
Rasn - выходная характеристика датчика угловых перемещений;
Tdsqx,y,z - токовый дрейф;
Mdsqx,y,z - магнитный дрейф.
Таким образом, в предложенном способе достигается требуемый технический результат, который заключается в повышении точности компенсации ошибок в результатах измерений путем учета температурных изменений амплитуды сигнала медленного меандра и нетемпературных изменений амплитуды подставки, например, при выбеге датчика сразу после запуска гироскопа. Это обеспечивается тем, что, в предложенном способе реализуется возможность учесть текущее изменение амплитуды частотной подставки при расчете амплитуды медленного меандра, что позволяет точнее рассчитывать амплитуду медленного меандра при выбеге датчиков угловых перемещений, наблюдающимся в течение нескольких минут после включения трехосного лазерного гироскопа.
Наилучший результат предложенный способ дает для датчиков с большим начальным выбегом амплитуды частотной подставки. Изменение амплитуды частотной подставки и, соответственно, меандра в первые 10 минут работы в таких датчиках могут превышать 2%. В способе-прототипе такие изменения скорректировать невозможно, так как константа, записанная в память вычислителя ЛГ задана как среднее значение медленного меандра и, соответственно, с ее помощью компенсировать выбег невозможно.
На фиг. 4 представлен график накопленного угла за 50 секунд работы лазерного гироскопа при компенсации медленного меандра константой. При амплитуде медленного меандра в 1.5 импульса, частоте переключения медленного меандра 0.5 Гц и частоте съема данных 1 кГц при остаточном медленном меандре в 38 импульсов (см. фиг. 4) ошибка компенсации медленного меандра составляет:
На фиг. 5 представлен график накопленного угла за 50 секунд работы лазерного гироскопа в тех же климатических условиях при компенсации медленного меандра предложенным способом. При амплитуде медленного меандра в 1.5 импульса, частоте переключения медленного меандра 0.5 Гц и частоте съема данных 1 кГц при остаточном медленном меандре в 7 импульсов (см. фиг. 5) ошибка компенсации медленного меандра составляет:
Таким образом, предложенный метод позволяет уменьшить разброс показаний лазерного гироскопа более, чем в 5 раз, тем самым повысив его точность.

Приемный канал лазерного дальномера
Способ контроля состояния конструкции инженерно-строительного сооружения
Способ определения ошибок ориентации измерительных осей лазерных гироскопов и маятниковых акселерометров в бесплатформенной инерциальной навигационной системе
Способ уменьшения магнитного дрейфа зеемановских лазерных гироскопов
Способ контроля состояния конструкции инженерно-строительного сооружения
Способ изготовления окисной пленки холодного катода газового лазера в тлеющем разряде постоянного тока
Система регулировки периметра зеемановского лазерного гироскопа
Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе
Система регулировки периметра зеемановского лазерного гироскопа
Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа
Способ рассечения биологической ткани лазерным излучением

