ПЛАВУЧЕЕ СРЕДСТВО
Вид РИД
Изобретение
Изобретение относится к плавучему средству, содержащему корпус, который имеет крыльевой комплекс как в области кормы, так и в области носа, при этом каждый крыльевой комплекс имеет подводные крылья, размещенные на обеих сторонах корпуса.
Плавучие средства данного типа также известны из уровня техники, как суда на подводных крыльях. По мере увеличения скорости движения эти плавучие средства поднимаются посредством подводных крыльев, которые по меньшей мере частично погружены ниже поверхности воды. В области водных видов спорта большинство подводных крыльев выполнены жесткими, т.е. естественная деформация сведена к минимуму или ограничена до малой степени. В этих случаях проектные расчеты основаны на геометрии в деформированном состоянии, которая используется в качестве основы для оптимизации подводных крыльев. Результатом является подводное крыло, которое может характеризоваться жесткостью или прочностью.
С целью стабилизации положения судна на подводных крыльях в воде целесообразно обеспечить жесткие подводные крылья с подвижными элементами. Один такой крыльевой комплекс описан в документе WO 2011/075053 A1. В этом решении непроникающие подводные крылья соединены с судном на подводных крыльях с помощью шарнирных стоек. Если происходит наклон судна под углом крена, что в результате приводит к поперечному движению судна на подводных крыльях относительно поверхности воды, стойки поворачиваются относительно судна на подводных крыльях. Это вызывает смещение подъемной силы подводных крыльев в поперечном направлении для противодействия поперечному движению судна на подводных крыльях, тем самым стабилизируя судно на подводных крыльях. С этой целью подводные крылья также могут иметь регулируемые элементы. Однако описанные меры относятся только лишь к поперечной стабилизации судна на подводных крыльях с непроникающими крыльями.
Целью настоящего изобретения является создание универсального плавучего средства вышеуказанного типа, в котором обеспечивается устойчивое положение в воде при сохранении хорошей динамики движения в широком диапазоне условий.
Данная цель достигается признаками пункта 1 формулы изобретения. В соответствии с указанным пунктом формулы изобретения крыльевые комплексы соединены по меньшей мере с одним регулировочным устройством таким образом, что высота как носового крыльевого комплекса, так и кормового крыльевого комплекса может по меньшей мере частично независимо регулироваться.
Такое вертикальное регулирование обеспечивает преобразование плавучего средства из глиссирующего судна с полностью сложенными подводными крыльями в судно на подводных крыльях с разложенными подводными крыльями. Вертикальное регулирование может быть выполнено в неподвижном состоянии или на ходу, так что высота хода плавучего средства может регулироваться в любое время в зависимости от обстоятельств в широком диапазоне условий эксплуатации и нагрузки. Этим обеспечивается регулирование во время медленного или высокоскоростного хода, например, по спокойной воде или волнам. По меньшей мере частичное независимое вертикальное регулирование обеспечивает гибкое регулирование баланса моментов и силы, требуемых для определенных условий плавания. Полное складывание крыльевого комплекса обеспечивает хранение с оптимизацией пространства, например, в автоприцепе, и упрощает стоянку плавучего средства на мелководных берегах, или медленное прохождение по мелководью.
В преимущественном варианте предусмотрено независимое вертикальное регулирование каждого из носовых подводных крыльев и/или кормовых подводных крыльев. Также представляется возможной манипуляция углом наклона подводных крыльев. Например, может регулироваться балансировка (продольная или поперечная) плавучего средства, улучшается его движение при повороте и/или улучшаются или даже ухудшаются свойства его динамики движения.
Для обеспечения легкой и независимой манипуляции каждое подводное крыло предпочтительно снабжено регулировочным устройством с приводом для вертикального регулирования.
Для вертикального регулирования, которое оптимизировано в части усилия и приспособлено к корпусу, целесообразным является присоединение регулировочных устройств носовых и/или кормовых подводных крыльев или крыльевых комплексов к корпусу с помощью рычажного механизма.
Простое регулирование может быть обеспечено за счет рычажного механизма, реализованного в виде четырехшарнирной системы и/или системы с направляющими.
Предпочтительно, корпус снабжен приводом судна, причем привод судна содержит устройство для создания упора, в частности гребной винт или реактивный водометный механизм, при этом привод судна или по меньшей мере часть привода судна присоединена к корпусу с возможностью вертикального регулирования двигателя, а управляющее устройство синхронизировано с регулировочными устройствами подводных крыльев и/или крыльевого комплекса. Возможность вертикального регулирования по меньшей мере части привода судна препятствует превышению максимальной глубины погружения привода судна. Кроме того, она обеспечивает баланс моментов и, таким образом, устойчивое позиционирование корпуса в широком диапазоне условий эксплуатации и нагрузки, таких как запуск, ускорение, ход и торможение. Поскольку баланс моментов также подвергается влиянию гидродинамических сил в крыльевых комплексах и подводных крыльях, целесообразной является синхронизация управляющего устройства для регулирования привода судна с регулировочными устройствами подводных крыльев и/или по меньшей мере одного крыльевого комплекса. В контексте данного документа под синхронизацией подразумевается сочетание регулирования привода судна с регулированием подводных крыльев и/или крыльевых комплексов. Это может относиться к высотам или траекториям регулирования рассматриваемых элементов, причем сочетание осуществляется в одинаковых или противоположных направлениях. Например, вертикальное регулирование заднего крыльевого комплекса по траектории x регулирования может автоматически активировать вертикальное регулирование привода судна по lx, где l представляет собой коэффициент пропорциональности.
Предпочтительно, управляющее устройство также может быть выполнено с возможностью регулирования как положения устройства для создания упора по высоте относительно корпуса, так и углового положения устройства для создания упора. Изменение углового положения устройства для создания упора подобным образом влияет на баланс моментов. Таким образом, в предпочтительном варианте угловое положение устройства для создания упора также по меньшей мере частично сочетаться с регулированием крыльевых комплексов и/или подводных крыльев. В качестве альтернативы, положение по высоте и угловое положение устройства для создания упора могут сочетаться аналогичным образом или могут быть реализованы независимо друг от друга.
Для универсального сочетания вертикального и углового регулирования устройства для создания упора предпочтительно, чтобы управляющее устройство содержало четырехшарнирную систему или образовывало направляющую с по меньшей мере одной нелинейной проходящей по геодезической высоте направляющей приемной прорезью или направляющую с двумя непараллельными линейными направляющими приемными прорезями, и опору двигателя, которая может регулируемым образом направляться по направляющим приемным прорезям. В качестве альтернативы, вертикальное регулирование и угловое регулирование реактивного двигателя могут не сочетаться друг с другом, т.е. могут осуществляться независимо друг от друга.
Выполнение носовых и/или кормовых подводных крыльев как части проникающего или непроникающего крыльевого комплекса или выполнение носовых и/или кормовых подводных крыльев объединенными друг с другом для образования единого крыльевого комплекса делает плавучее средство в высокой степени универсальным и приспосабливаемым для удовлетворения индивидуальных потребностей. Также могут использоваться единые крыльевые комплексы, являющиеся проникающими или непроникающими.
Вышеописанные регулируемые компоненты плавучего средства регулируются с оптимизацией для различных условий эксплуатации и нагрузки благодаря тому, что корпус снабжен сенсорной системой, при этом сенсорная система отслеживает уровень воды вблизи корпуса, в частности, в направлении хода спереди, ниже и/или сзади плавучего средства, и/или благодаря тому, что сенсорная система содержит тензометр, который косвенно или прямо отслеживает подъемную силу, воздействующую на одно или более подводных крыльев, и/или благодаря тому, что сенсорная система отслеживает положение и/или ускорение и/или скорость по меньшей мере части корпуса в пространстве, и благодаря тому, что на основе по меньшей мере одной измеренной величины, отслеживаемой сенсорной системой, контролирующее устройство управляет вертикальным регулированием крыльевого комплекса и/или подводными крыльями. Например, на основе по меньшей мере одной отслеживаемой измеренной величины может быть определен алгоритм, который затем активирует конкретное управляющее действие, такое как регулирование носовых подводных крыльев. Могут возникать различные условия нагрузки, например, при перемещении пассажиров. За счет их перемещения и, как следствие, изменения их расстояний от центра тяжести корпуса 10 ими изменяется баланс моментов, и это подобным образом может быть обнаружено сенсорной системой.
Упрощенная конструкция обеспечивается благодаря тому, что по меньшей мере один крыльевой комплекс или по меньшей мере одно подводное крыло имеет крыльевую область, причем крыльевая область соединяет друг с другом два компонента, в частности части крыла крыльевого комплекса или подводного крыла, или образует по меньшей мере одну концевую часть крыльевого комплекса или подводного крыла. В этом случае крыльевая область выполнена таким образом, что при воздействии на нее нагрузкой в направлении приложения нагрузки она осуществляет регулирование крыльевого комплекса или по меньшей мере части подводного крыла в регулировочное положение, которое не совпадает с направлением приложения нагрузки. Безусловно, регулировочное положение, лежащее в направлении приложения нагрузки, или комбинация двух регулировок, также возможны. Этим обеспечиваются ориентированные деформации или ответные реакции. Они могут выборочно подвергаться влиянию гидродинамических сил и моментов, или сил и моментов, которые вносятся механизмами, например приводными устройствами, так что узлы несущих поверхностей и/или несущие поверхности регулируются до желаемых положений и форм. Уменьшение силы или момента деформации приведет к соответствующему возврату в исходное состояние. Это может уменьшить количество соединительных и пружинных механизмов, требуемых для деформации. Кроме того, возможность независимых деформаций улучшает динамику движения. Также обеспечивается хорошая устойчивость, в частности, при несимметричных условиях, таких как движение при повороте или преодоление волн по диагонали. Это происходит благодаря тому, что несимметричные силы, в частности, вызывают несимметричные деформации гибких крыльевых областей. Преимущественно, подобным образом ими может быть обусловлено несимметричное распространение подъемных сил в подводных крыльях, стабилизируя, таким образом, плавучее средство. В случае движения при повороте плавучего средства с проникающими подводными крыльями центростремительные силы, например, могут привести к тому, что положение подводных крыльев в воде будет таким, что рабочая несущая поверхность подводного крыла относительно стороны судна, обращенной в сторону траектории, увеличивается, тогда как такая поверхность стороны, обращенной от траектории, уменьшается. Это приводит в результате к подъемной силе, которая противодействует качке плавучего средства, тем самым стабилизируя его. Изменение эффективной несущей поверхности может быть обусловлено деформацией подводных крыльев, но также их погруженной частью и углом погружения, однако в большинстве случаев оно обусловлено комбинацией данных факторов.
Выполнение крыльевой области в виде слоистого элемента, слои которого выполнены из волокнистых материалов, и в котором основные направления волокон волокнистых материалов по меньшей мере двух соседних слоев отличаются друг от друга, делает возможным придание особых деформационных свойств и в то же время обеспечивает высокую степень устойчивости.
Это же достигается вариантом исполнения, в котором крыльевые области имеют прерывающийся профиль поперечного сечения.
Изобретение далее будет описано более подробно на примерах вариантов реализации со ссылкой на комплект чертежей.
Показано следующее:
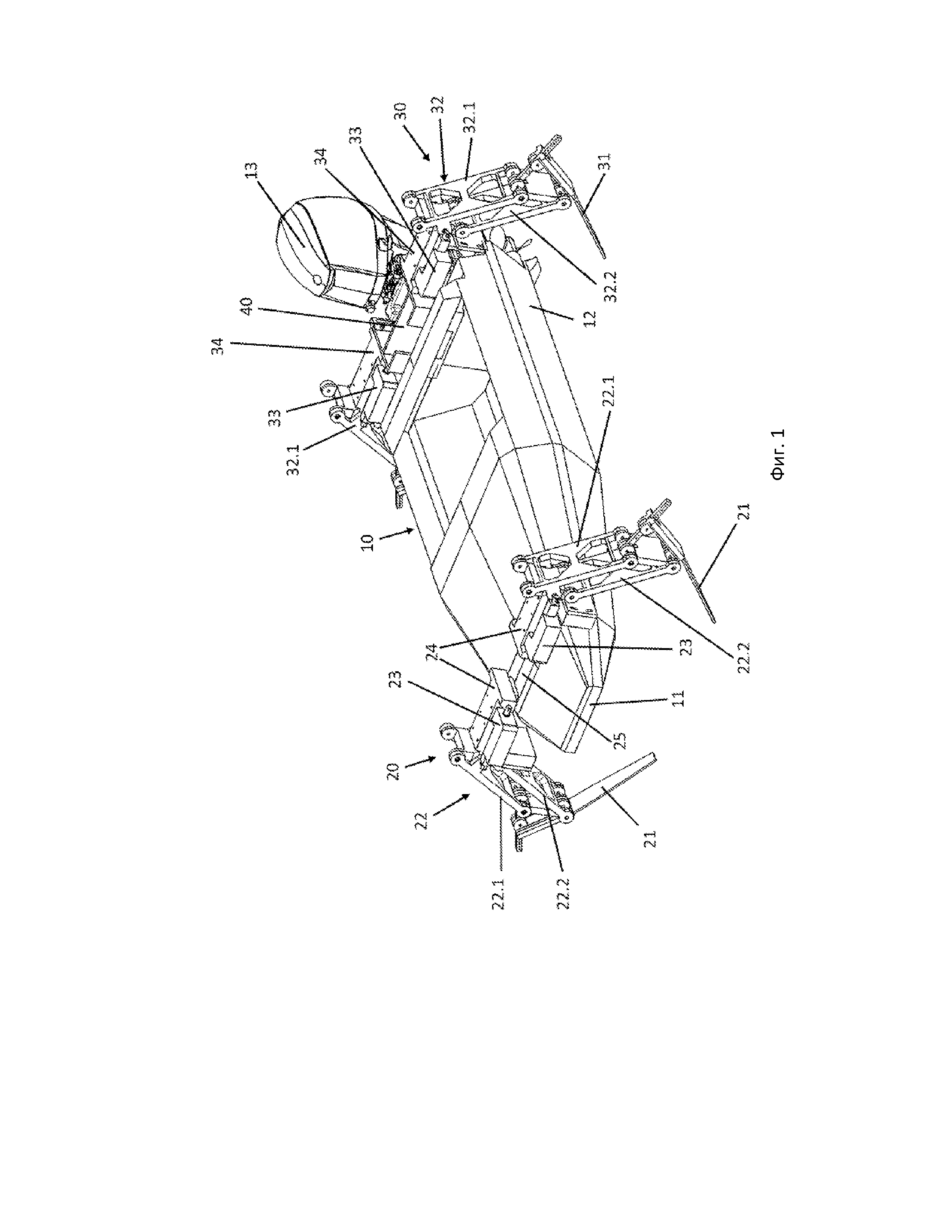
Фиг. 1 вид в перспективе плавучего средства,
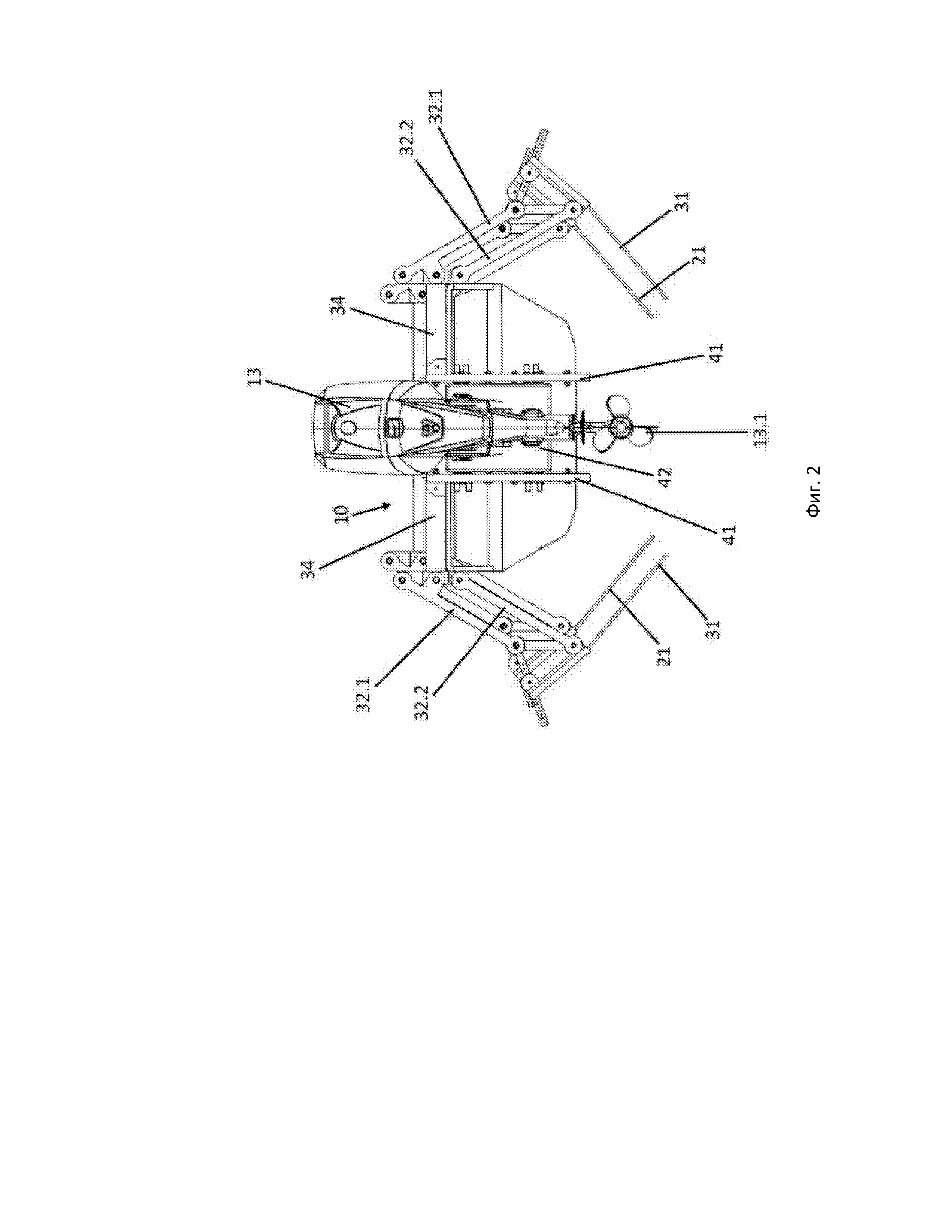
Фиг. 2 вид сзади плавучего средства по фиг. 1,
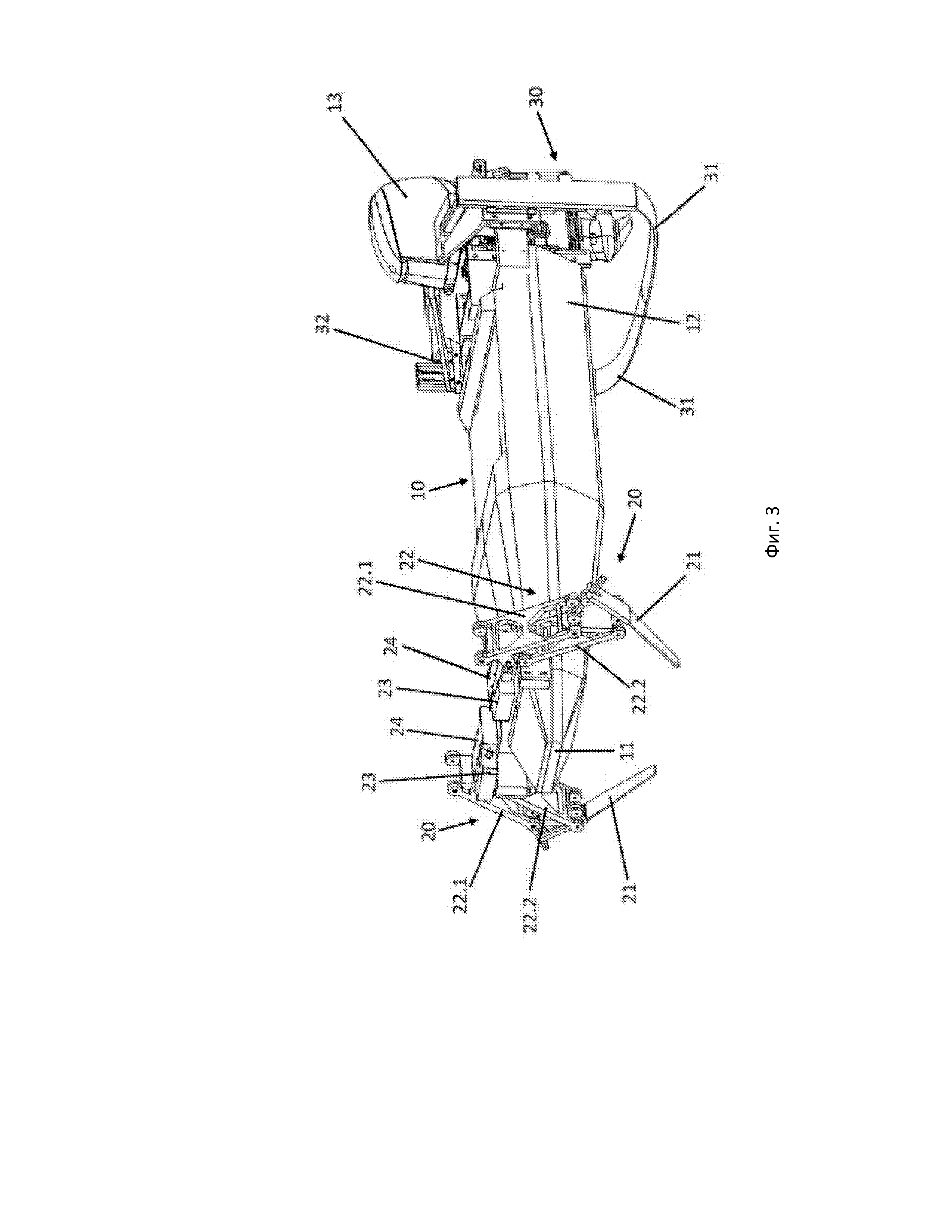
Фиг. 3 вид в перспективе плавучего средства с единым крыльевым комплексом, расположенным на корме,
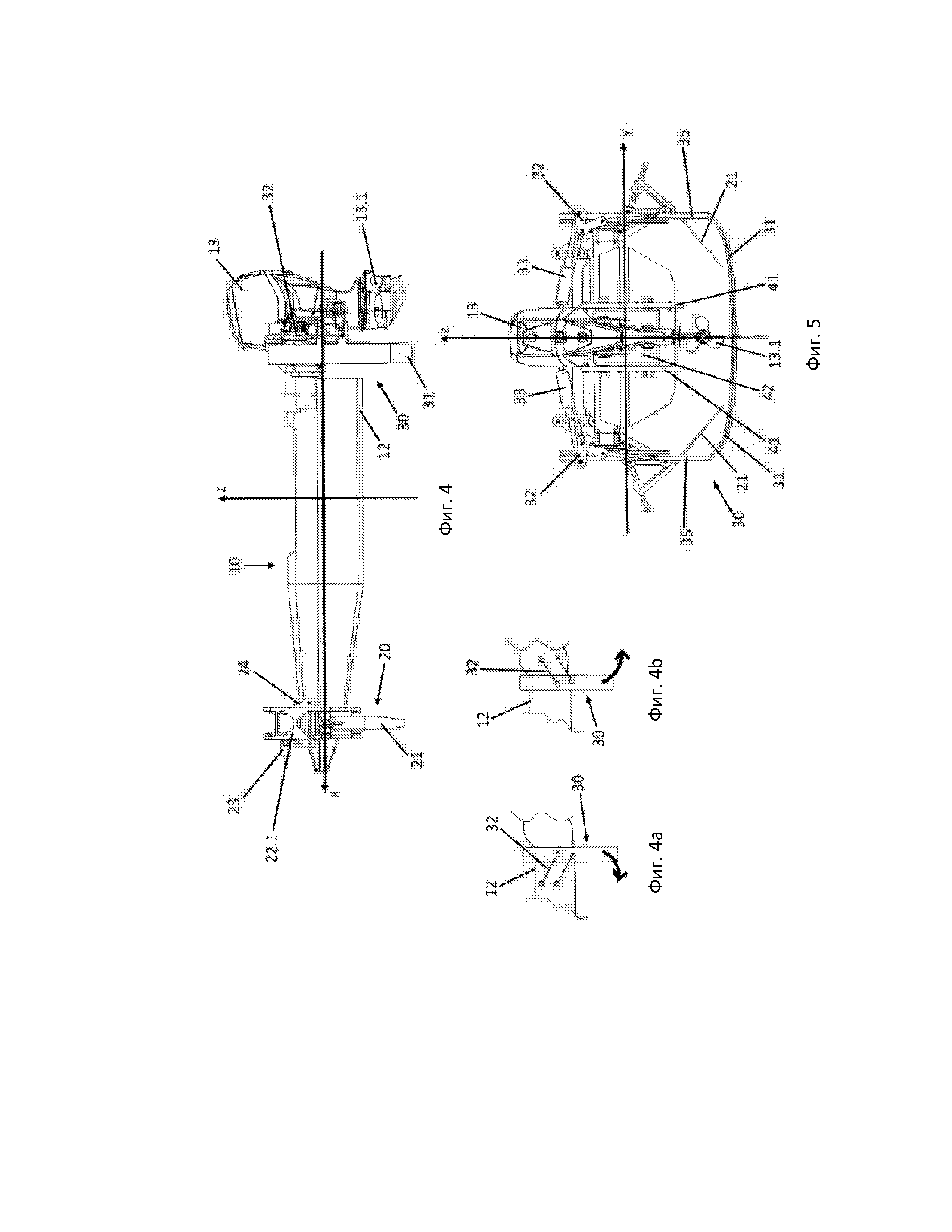
Фиг. 4 вид сбоку плавучего средства по фиг. 3,
Фиг. 4a схематический частичный вид кормы плавучего средства с параллельным поворотным элементом, поворачивающимся по часовой стрелке,
Фиг. 4b схематический частичный вид кормы плавучего средства с параллельным поворотным элементом, поворачивающимся против часовой стрелки,
Фиг. 5 вид сзади плавучего средства по фиг. 3,
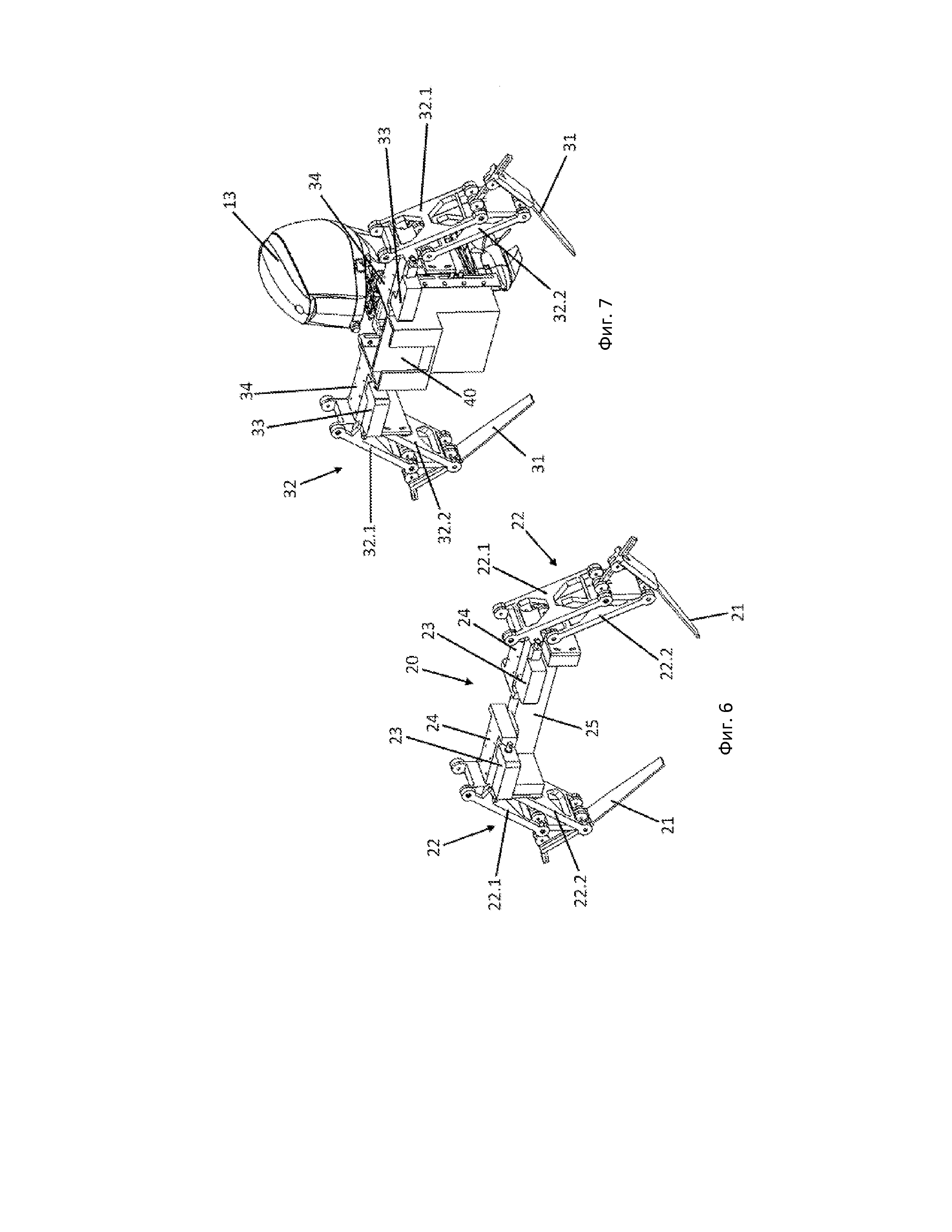
Фиг. 6 вид в перспективе носового крыльевого комплекса,
Фиг. 7 вид в перспективе кормового крыльевого комплекса и привода судна,
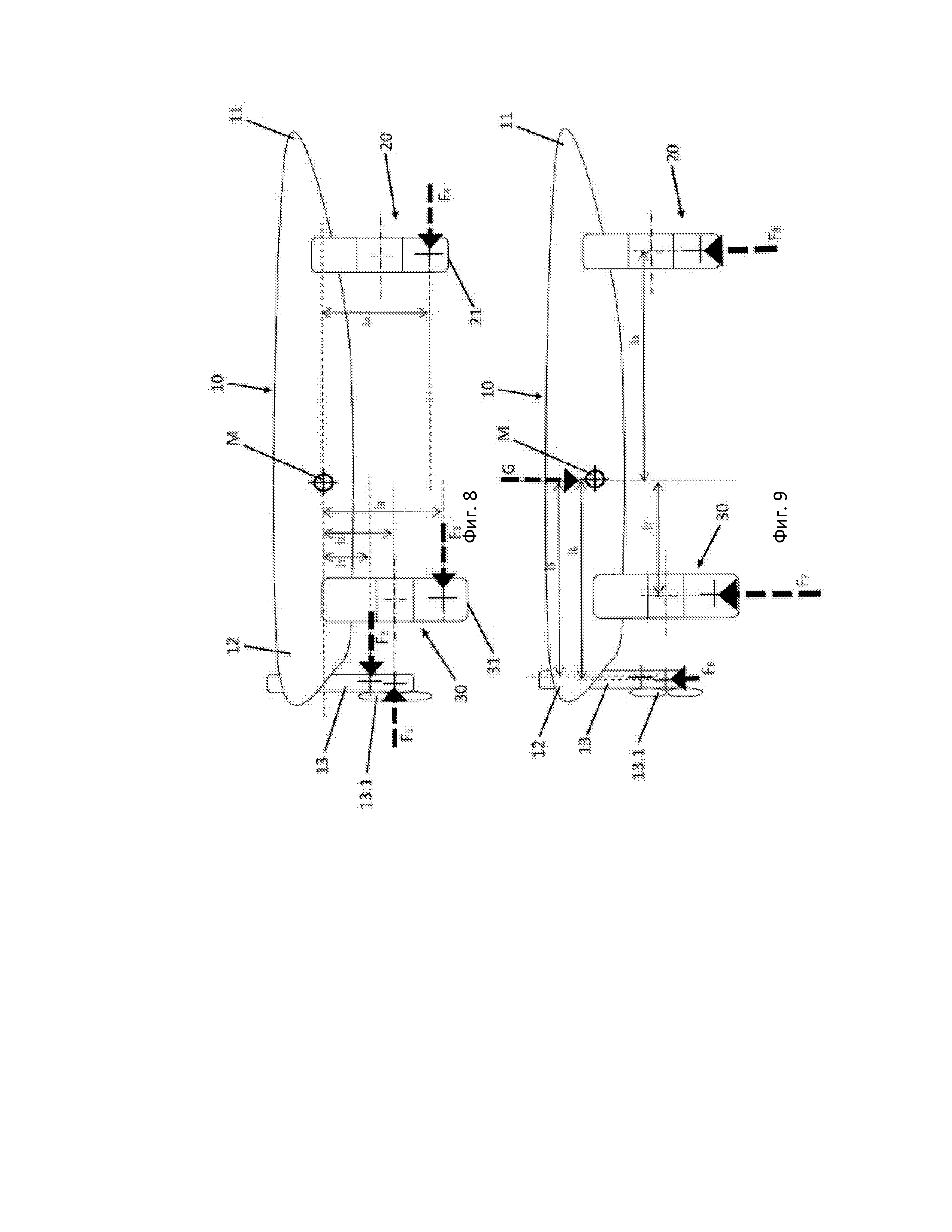
Фиг. 8 схематический вид сбоку моментов, воздействующих на плавучее средство через горизонтальные силы,
Фиг. 9 схематический вид сбоку моментов, воздействующих на плавучее средство по фиг. 8 через вертикальные силы,
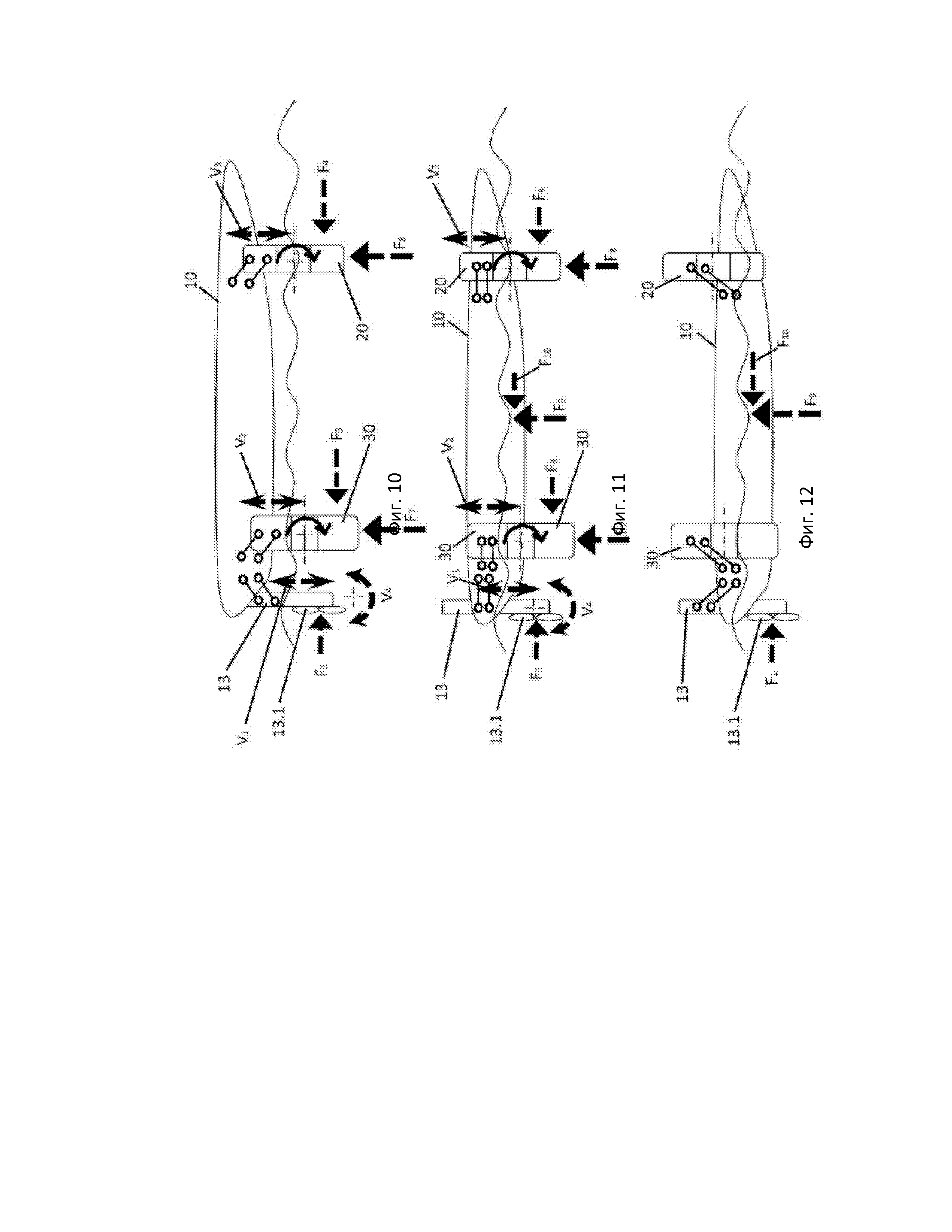
Фиг. 10 схематический вид плавучего средства с полностью разложенными крыльевыми комплексами,
Фиг. 11 схематический вид сбоку плавучего средства по фиг. 10 с частично разложенными крыльевыми комплексами,
Фиг. 12 схематический вид сбоку плавучего средства по фиг. 10 со сложенными крыльевыми комплексами,
Фиг. 13 схематический частичный вид кормы плавучего средства с приводом судна,
Фиг. 14 схематическое изображение вида сбоку управляющего устройства,
Фиг. 15 вид в перспективе управляющего устройства,
Фиг. 16 вид сбоку управляющего устройства,
Фиг. 17 схематическое изображение подводных крыльев,
Фиг. 18 вид в перспективе и вид сбоку подводного крыла,
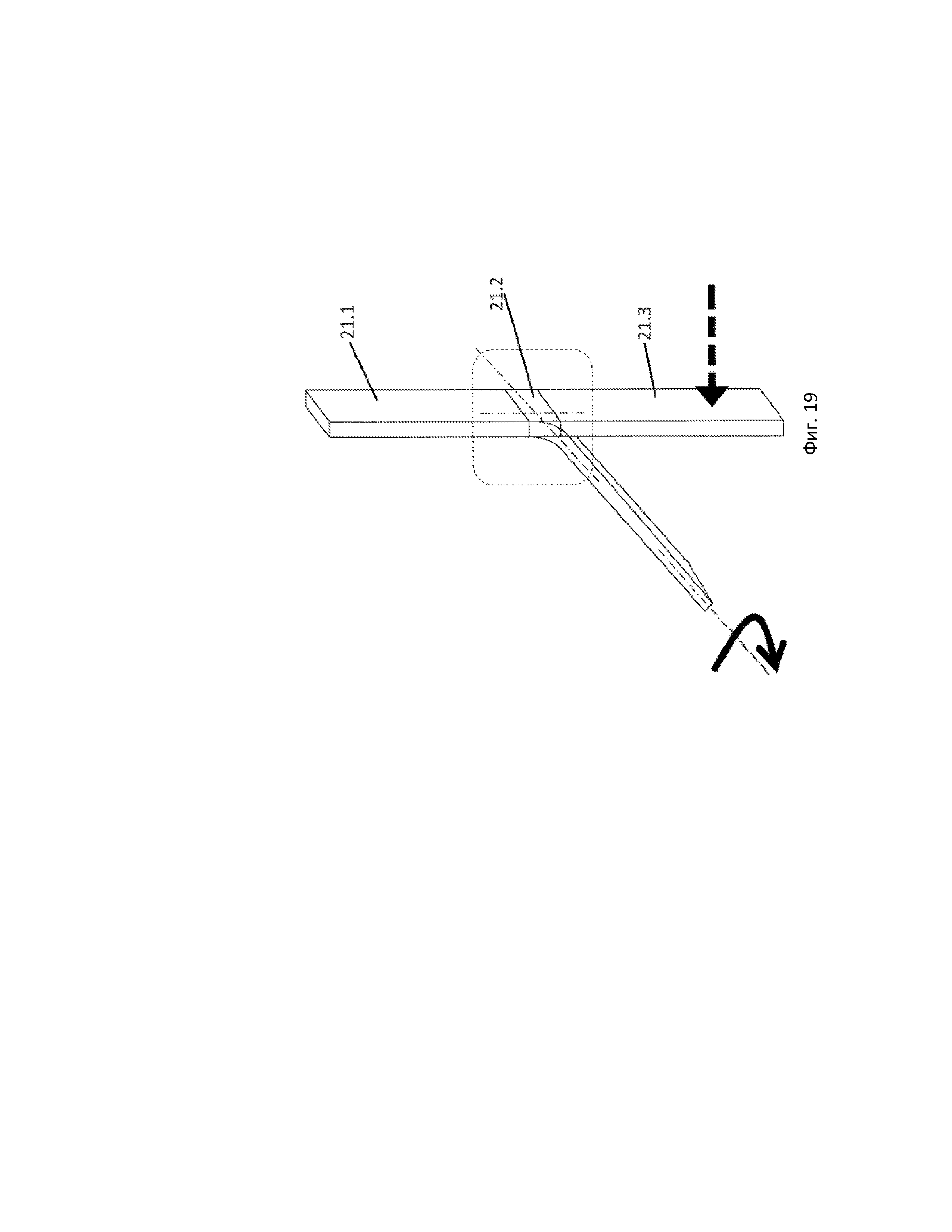
Фиг. 19 вид в перспективе деформации подводного крыла,
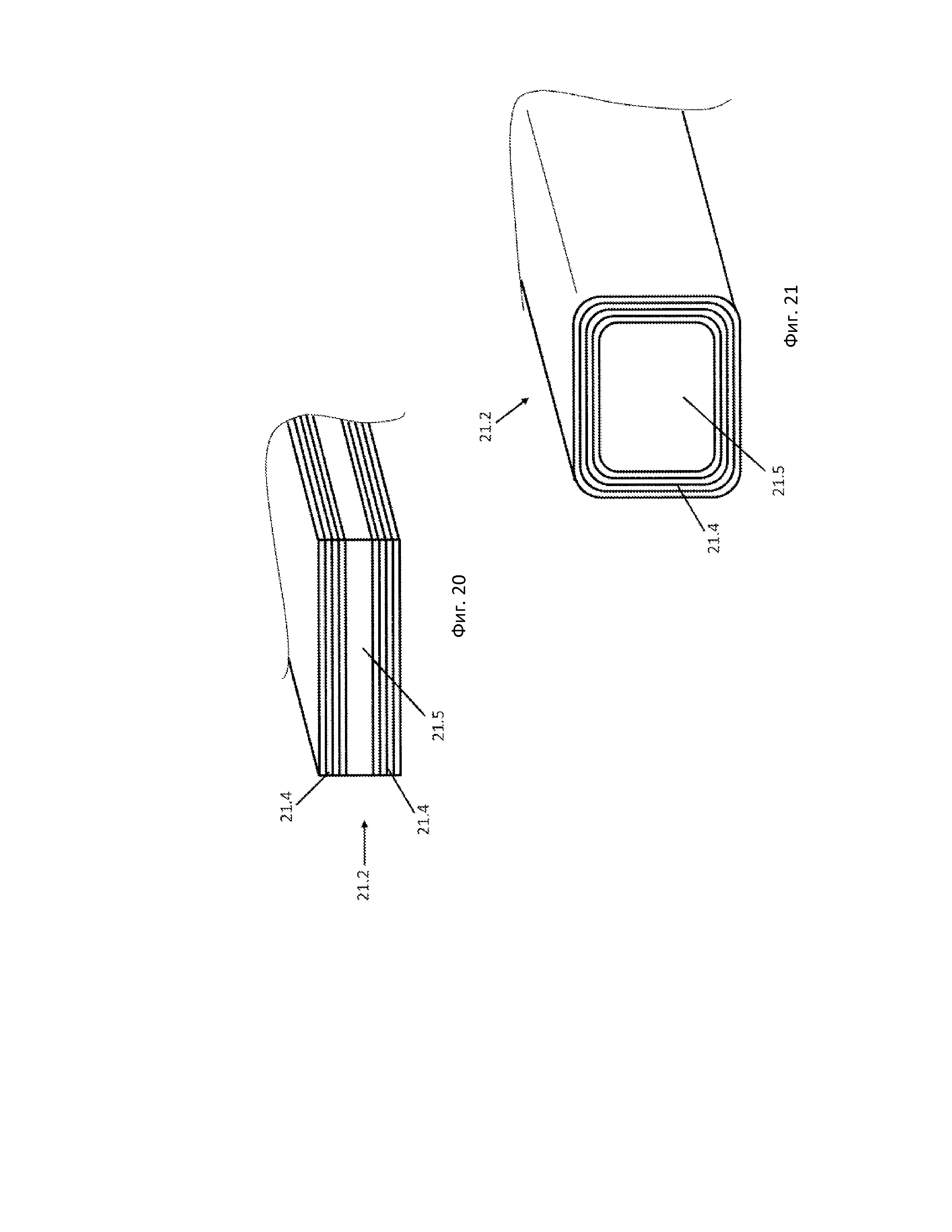
Фиг. 20 частичный вид в перспективе крыльевой области,
Фиг. 21 частичный вид в перспективе крыльевой области,
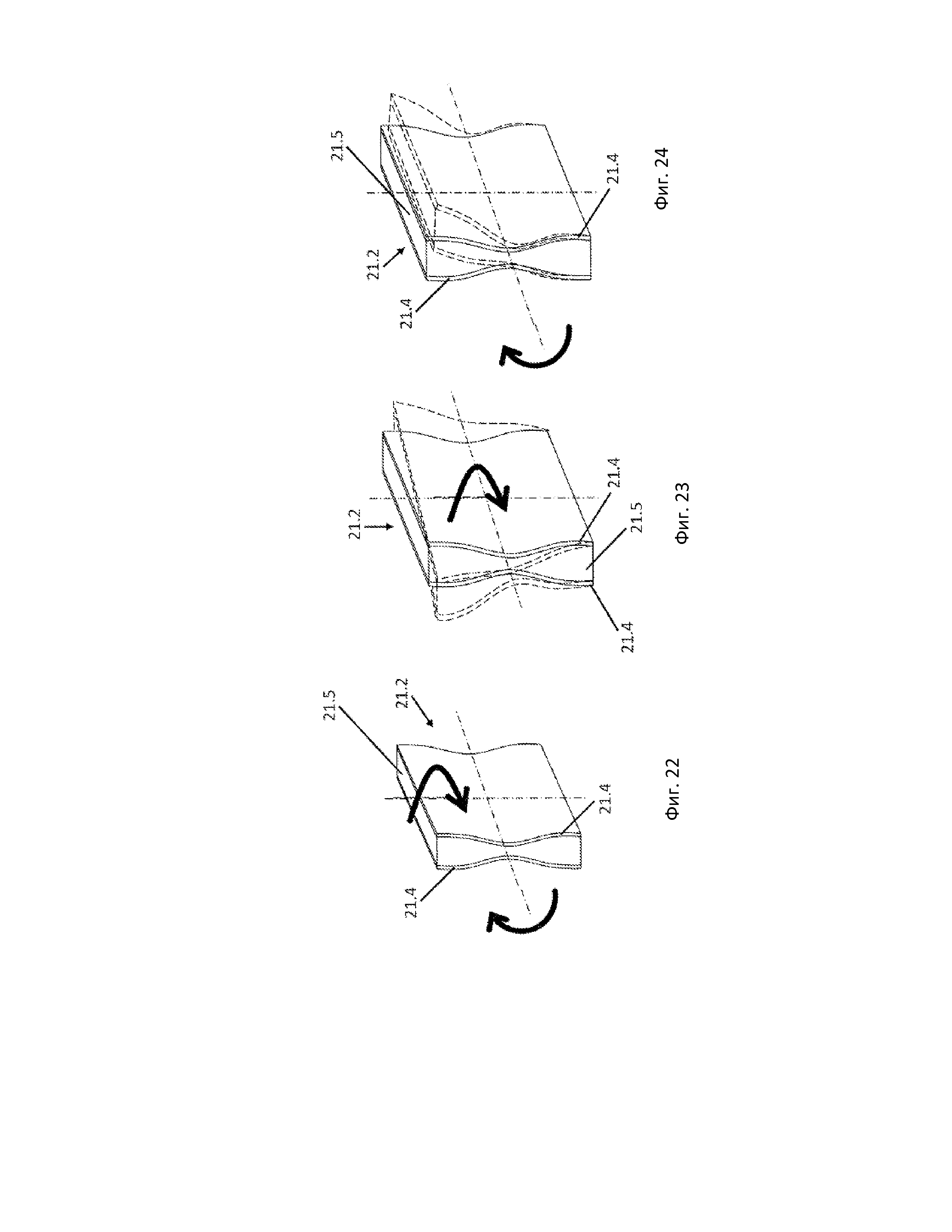
Фиг. 22 вид в перспективе крыльевой области с постепенно сужающимся поперечным сечением,
Фиг. 23 крыльевая область по фиг. 22 при кручении,
Фиг. 24 крыльевая область по фиг. 22 при отклонении,
Фиг. 25 вид в перспективе крыльевой области с плоским поперечным сечением,
Фиг. 26 крыльевая область по фиг. 25 при отклонении, и
Фиг. 27 крыльевая область по фиг. 26 при кручении.
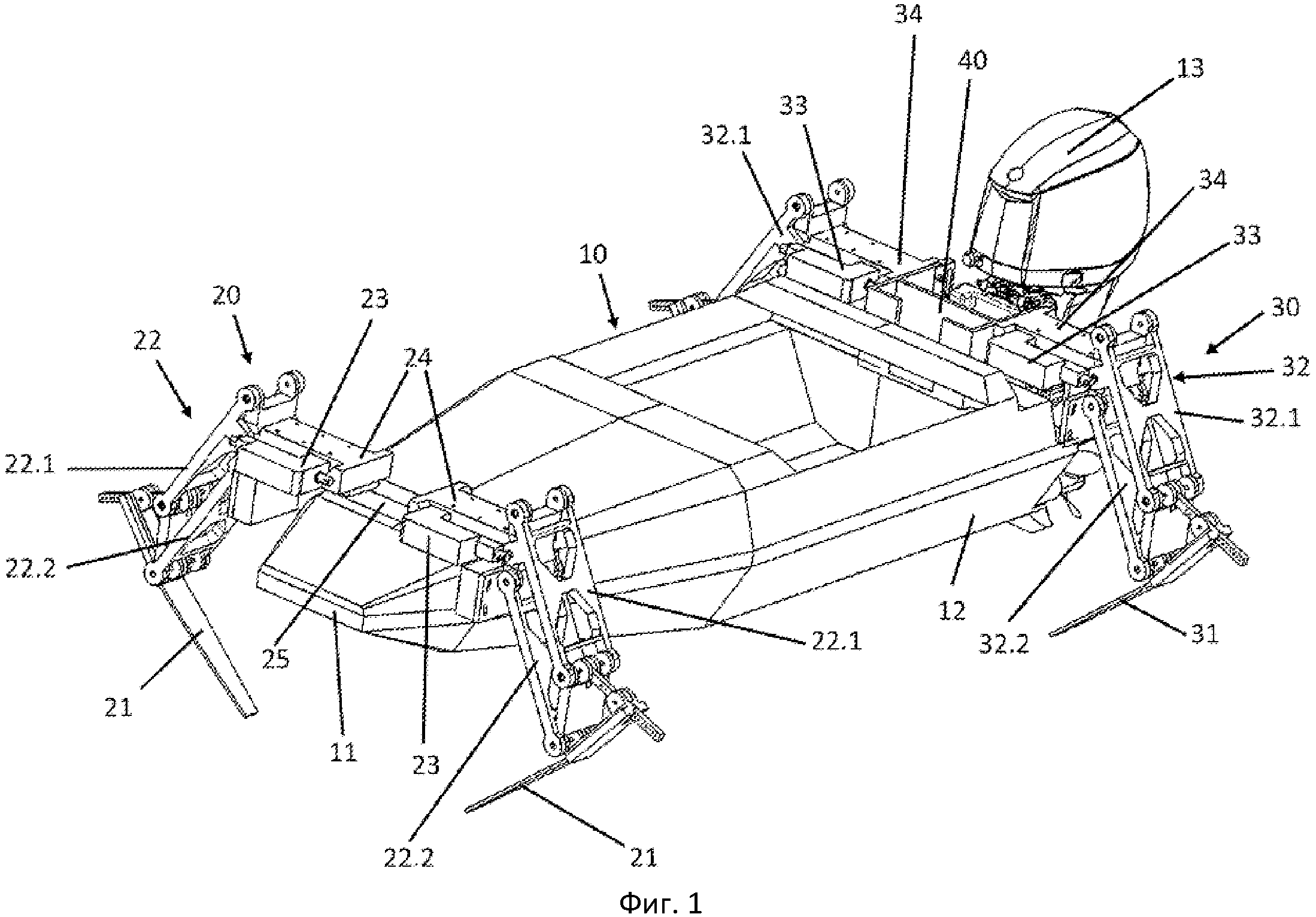
На фиг. 1 показано плавучее средство с корпусом 10, который имеет нос 11 и корму 12. К корпусу 10 в области носа присоединен крыльевой комплекс 20, а в области кормы присоединен крыльевой комплекс 30 для того, чтобы обеспечить передачу силы от крыльевого комплекса 20, 30 к корпусу 10. Соединение может быть осуществлено прямым или косвенным образом, например, посредством опоры 40 для привода 13 судна. На концах крыльевых комплексов 20, 30, которые выполнены с возможностью погружения ниже поверхности воды, расположены подводные крылья 21, 31, по одному с каждой стороны корпуса 10. Подводные крылья представляют собой C-образные крылья, которые не соединены друг с другом. Возможны также и другие формы. Подводные крылья 21, 31 соединены с корпусом 10 с возможностью движения, например, с помощью регулировочных устройств 22, 32.
На кормовом конце корпуса 10 расположен привод 13 судна посредством опоры 40. В настоящем варианте реализации он представляет собой забортный двигатель, однако также возможны и другие конфигурации двигателя, такие как двигатель, находящийся внутри судна. Также к опоре 30 прикреплен кормовой крыльевой комплекс 30.
Как явным образом видно на фиг. 2, опора 40 содержит управляющее устройство 41 и опорный кронштейн 42 двигателя, к которому надежно, но с возможностью отсоединения, присоединен привод 13 судна, например, с помощью болтов. Гребной винт 13.1 служит в качестве устройства для создания упора на приводе 13 судна. Однако также возможны другие устройства для создания упора, такие как реактивный водометный механизм.
На фиг. 3 показано плавучее средство с корпусом 10, на котором кормовой крыльевой комплекс 30 выполнен единым. Это обеспечивается за счет непосредственного соединения подводных крыльев 31 друг с другом со стороны, которая погружена ниже поверхности воды.
На фиг. 4 показан вид сбоку плавучего средства по фиг. 3. На фиг. 5 показан вид сзади. Как явным образом видно на фиг. 5, подводные крылья 21 носового крыльевого комплекса 20 установлены под наклоном относительно диаметральной плоскости (плоскости xz, x – осевой профиль, см. фиг. 4) корпуса 10. В отличие от этого, подводные крылья 31, которые соединены друг с другом, проходят практически перпендикулярно диаметральной плоскости корпуса 10. Они соединены с регулировочным устройством 32 с помощью компонентов 35 подводного крыла, которые проходят практически в направлении z.
Подробный вид носового крыльевого комплекса 20 показан на фиг. 6, а подробный вид кормового крыльевого комплекса показан на фиг. 7. На фиг. 6 показан носовой крыльевой комплекс 20 с подводными крыльями 21 и регулировочными устройствами 22. Каждое из несущих крыльев 20, расположенных по одному на каждой стороне, снабжено приводом 23 на стороне, обращенной от воды, при этом каждый привод присоединен к соответствующему кронштейну 24. Кронштейны 24, в свою очередь, установлены на мостике 25, который проходит в направлении y, так что он соединяет элементы, расположенные с обеих сторон. Регулировочные устройства 22 прикреплены к кронштейнам 24 с возможностью движения. Регулировочные устройства снабжены параллельными рычагами 22.1 и 22.2, которые поворотно соединены друг с другом с помощью соединительных и переходных элементов. Этим обеспечивается возможность регулирования подводных крыльев 21, расположенных на регулировочных устройствах 22, по высоте. Наклон подводных крыльев 21 также может изменяться.
Кормовой крыльевой комплекс 30 с подводными крыльями 31 и регулировочными устройствами 32, показанный на фиг. 7, содержит привод 33 для каждого подводного крыла, при этом каждый привод прикреплен к кронштейну 34. Кронштейны 34 установлены с обеих сторон опоры 40 для привода 13 судна. Регулировочные устройства 32 прикреплены к кронштейнам 34 с возможностью движения. Регулировочные устройства снабжены параллельными рычагами 32.1 и 32.2, которые поворотно соединены друг с другом с помощью соединительных и переходных элементов. Этим обеспечивается возможность регулирования подводных крыльев 31, расположенных на регулировочных устройствах 32.
На Фигурах 4-7 рычаги 22.1 и 22.2 и рычаги 32.1 и 32.2 могут поворачиваться вокруг оси x. Однако рычаги 22.1 и 22.2 и рычаги 32.1 и 32.2 также могут поворачиваться вокруг оси y, как изображено в варианте выполнения на фиг. 4a и 4b. Рычажные механизмы данного типа являются весьма неприхотливыми в обслуживании, и для них требуется низкая сложность конструкции.
Варианты реализации, показанные на Фигурах 1-7, обеспечивают возможность независимого регулирования отдельных подводных крыльев 21, 31 и/или отдельных крыльевых комплексов 20, 30 посредством соответствующих приводов 23, 33, предусмотренных для каждого подводного крыла 21, 31. Приводы 23, 33 могут быть электрическими, механическими или гидравлическими по конструкции или же могут приводиться в действие вручную. В дополнение, с помощью управляющего устройства 40 привод 13 судна может регулироваться по высоте и/или может изменяться его угловое положение. Регулирование этих компонентов изменяет баланс сил и моментов, обеспечивая, таким образом, возможность приспосабливания к различным условиям эксплуатации и нагрузки. Например, может регулироваться балансировка (продольная и поперечная) плавучего средства, а также может быть улучшено его движение при повороте и/или ход по волнам. Регулировка крыльевых комплексов 20, 30 и/или подводных крыльев 21, 31 может осуществляться сочетанно. Для баланса моментов особенно полезно сочетание положения привода 13 судна с регулировкой кормового крыльевого комплекса 30, причем сочетание осуществляется в одинаковых или противоположных направлениях.
На фиг. 8 и фиг. 9 изображены моменты, преобладающие в воде относительно центра M тяжести плавучего средства с подводными крыльями 21, 31 в полностью разложенном состоянии. Эти моменты возникают от сил F1-F8, исходящих от работающих подводных крыльев 21, 31 и привода судна, а также плеч l1-l8 их рычага. На фиг. 8 изображено воздействие результирующих горизонтальных сил, т.е. сил, действующих перпендикулярно силе тяготения. На фиг. 9 изображены вертикальные силы, действующие в направлении силы тяготения. Следует отметить, что длина стрелок, обозначающих силы, не пропорциональна их величинам. F1 представляет собой движущую силу привода 13 судна, F2-F4 представляют собой силы лобового сопротивления привода 13 судна и подводных крыльев 21, 31, G представляет собой силу тяготения, а F6-F8 представляют собой подъемные силы привода 13 судна и подводных крыльев 21, 31, которые противодействуют силе тяготения. Благодаря вертикальному и угловому регулированию работающие плечи l1-l8 рычага могут по меньшей мере частично регулироваться, а направление и величина действующих сил F1-F8 может по меньшей мере частично изменяться. Этим обеспечивается широкий диапазон вариантов воздействия на баланс моментов и, таким образом, на положение судна в воде. Движущая сила F1 и возникающая в результате подъемная сила F7 кормового крыльевого комплекса 30, моменты которых противодействуют друг другу, составляют существенную долю общего баланса. Задний крыльевой комплекс преимущественно составляет более 65% всей подъемной силы. Таким образом, сочетание регулирования этих моментов для того, чтобы получить желаемое соотношение, обеспечивает возможность управления балансом моментов и изменением центра тяжести, наряду с положением корпуса, при оптимальной величине усилия.
На Фигурах 10-12 показаны регулируемые компоненты в различных разложенных состояниях, т.е. крыльевые комплексы 20, 30 и привод 13.1 судна, а также соответствующие положения корпуса 10 в воде. Данная последовательность разложенных состояний является типичной при переходе от высокоскоростного хода, при котором компоненты полностью разложены (фиг. 10), через фазу торможения, при которой компоненты частично сложены (фиг. 11), к остановке, когда компоненты полностью сложены (фиг. 12). Различные положения корпуса 10 являются результатом сил и моментов, регулируемых в соответствии с текущим состоянием хода. На данных фигурах вертикальное регулирование обеспечивается за счет поворота вокруг оси y. V1-V3 указывают варианты вертикального регулирования крыльевых комплексов 20, 30 и/или привода 13.1 судна, а V4 указывает вариант углового регулирования привода 13.1 судна.
На фиг. 10 корпус 10 не находится во взаимодействии с поверхностью воды ввиду полностью разложенных компонентов, и плавучее средство действует в качестве судна на подводных крыльях. Затем соответствующим образом действуют силы F1-F8, указанные на фиг. 8 и 9. Когда компоненты находятся в частично сложенном состоянии (фиг. 11), корпус 10 находится во взаимодействии с поверхностью воды или частично проникает сквозь поверхность воды, так что через часть корпуса 10, которая находится в воде, прикладываются дополнительные подъемная сила (F9) и сила лобового сопротивления (F10). Когда компоненты полностью сложены (фиг. 12), подводными крыльями 21, 31 не создаются дополнительные силы F3-F8, и плавучее средство действует в качестве глиссирующего корпуса.
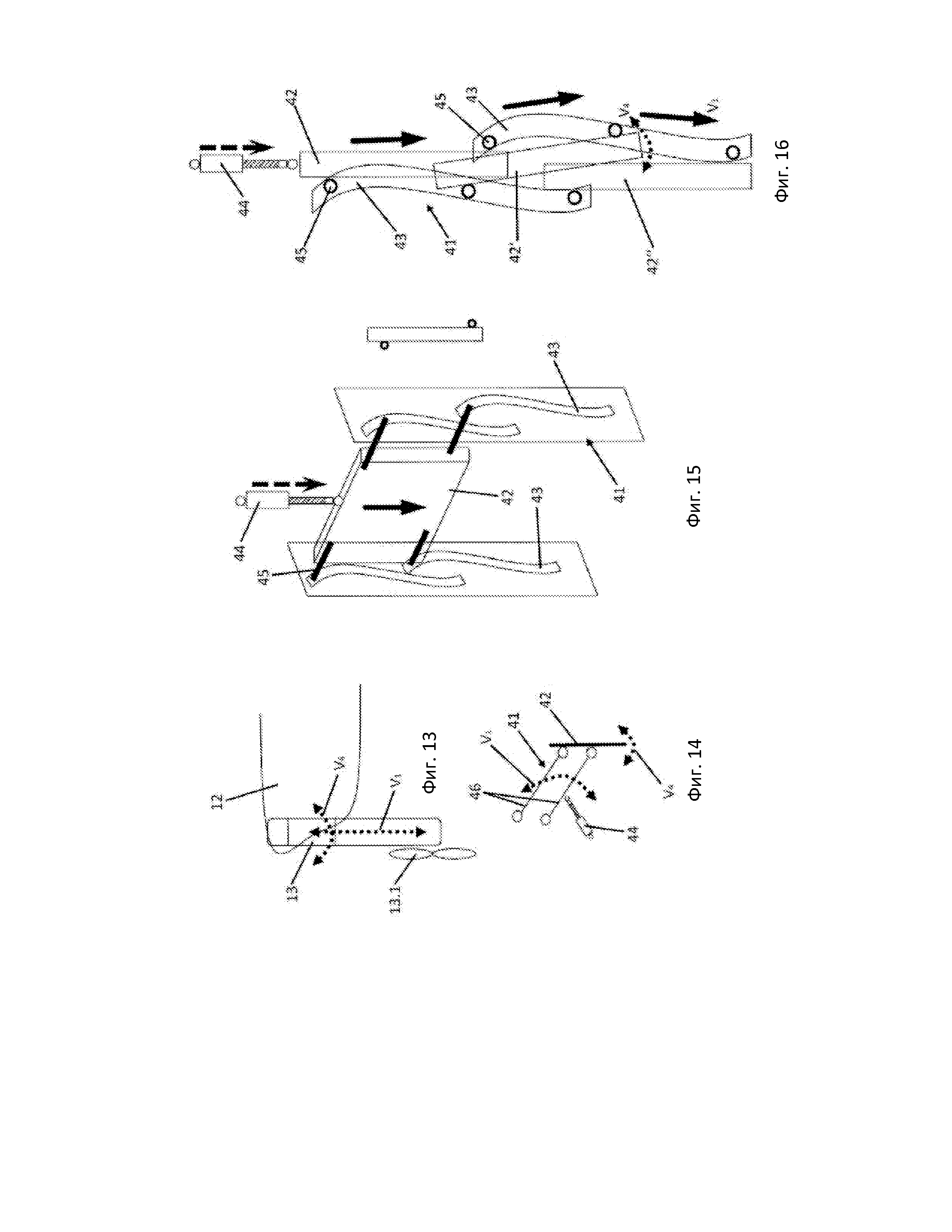
На фигурах 13-16 подробно показаны возможные варианты регулирования привода 13 судна, так что варианты регулирования, показанные на фиг. 13, могут быть реализованы в части высоты (V1) и угла (V4). В упрощенном варианте (фиг. 14) управляющее устройство 41 содержит два параллельных плеча 46 рычага, с помощью которых опора 42 двигателя расположена на корпусе 10 с возможностью регулирования, например, посредством соединителей. Регулирование осуществляется с помощью приводного устройства, которое может приводиться в действие, например гидравлически. Однако также возможно механическое, электрическое или ручное управление. Возможно выполнение плеч рычагов телескопическими, так что регулирование высоты и угла может осуществляться одновременно.
На фиг. 15 и 16 показан вариант реализации управляющего устройства 41, в котором опора 42 двигателя направляется по направляющим приемным прорезям 43. Для этого опора 42 двигателя соединена посредством направляющих элементов 45 с приемной направляющей прорезью 43. Для вертикального регулирования предусмотрено приводное устройство 44. Работа направляющей приемной прорези 43 продемонстрирована на фиг. 16, на которой показана опора 42 двигателя в различных положениях (42, 42', 42''). Подробно изображено сочетание вертикального и углового регулирования, которое обеспечивается благодаря особой форме направляющих приемных прорезей 43. Различные формы направляющих приемных прорезей 43 обеспечивают возможность получения различных форм сочетания вертикального и углового регулирования.
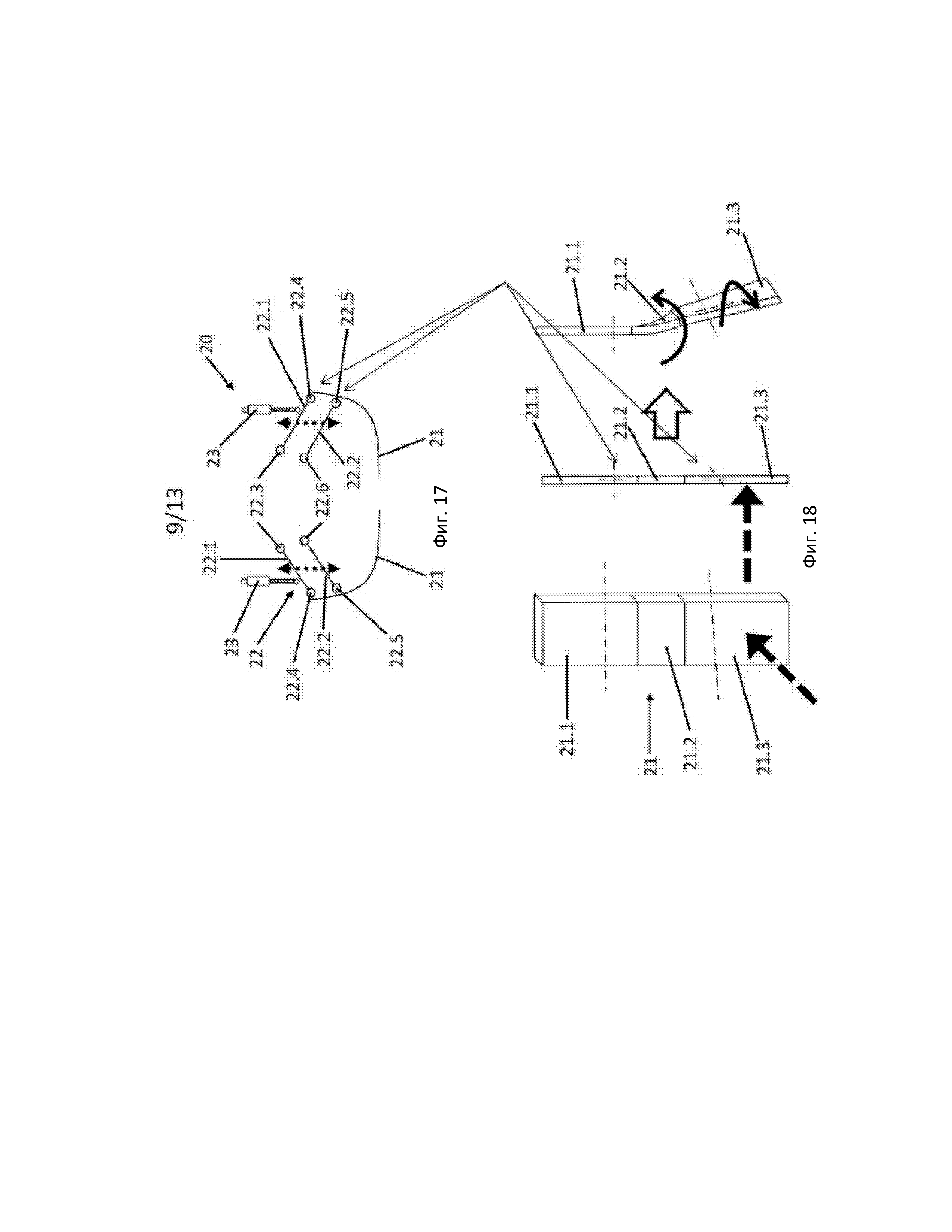
На фиг. 17 показан крыльевой комплекс 20 с гибкими подводными крыльями 21, при этом данные гибкие крыльевые области 21.2 будут описаны далее более подробно на последующих фигурах 18-27. На фиг. 17 подводные крылья 21 могут быть присоединены к корпусу 10 с возможностью движения с помощью регулировочных устройств 22. Регулировочные устройства 22 содержат рычаги 22.1 и 22.2, проходящие параллельно, которые могут поворачиваться с помощью соединителей 22.3-22.6. Регулировочные устройства 22 и, как следствие, подводные крылья 21, расположенные на них, могут регулироваться по высоте с помощью приводных устройств 23. Когда в результате регулирования условия действия сил изменяются, подводные крылья выборочно деформируются ввиду их гибкости. Гибкие подводные крылья 21 могут быть выполнены так, что нагрузка приводит к положению регулирования, которое не соответствует направлению приложения нагрузки. В дополнение к пассивной деформации, вызываемой внешними силами, действующими на плавучее средство, гибкие крыльевые области 21.1 могут деформироваться приводными устройствами.
На фиг. 18 показан иллюстративный вариант подводного крыла 21, выполненного гибким. На данной фигуре показан вид в перспективе с передней части подводного крыла, вид сбоку подводного крыла в неотрегулированном положении и вид сбоку подводного крыла 21 в положении, в которое он был отрегулирован силой. Подводное крыло 21 имеет две секции 21.1 и 21.3 подводного крыла, которые соединены друг с другом посредством крыльевой области 21.2. Сила действует на продольную центральную ось подводного крыла 21 (см. вид в перспективе), в частности на секцию 21.3 подводного крыла, слева (относительно вида сбоку). После этого гибкая крыльевая область 21.2 обеспечивает возможность не только отклонения вправо, но также подвергается скручивающему движению, которое не совпадает с направлением приложения нагрузки. Этим обеспечивается влияние подъемной силы как на изменение угла одной секции 21.3 подводного крыла относительно продольной центральной оси, так и на изменение угла наклона и, как следствие, на эффективную площадь несущей поверхности. Однако, как явно видно из фиг. 19, гибкая крыльевая область 21.2 также может быть выполнена только лишь для деформации от изгиба. При уменьшении или прекращении действия деформирующей силы деформация соответствующим образом обращается. Гибкая крыльевая область 21.2 также может проходить по всему подводному крылу 21, делая его одним гибким элементом. В этом случае оно может иметь области, обладающие различными степенями гибкости.
На фиг. 20 и 21 показаны типичные конфигурации гибких крыльевых областей 21.2. Области содержат гибкий компонент 21.5 сердцевины, который по меньшей мере частично покрыт слоями 21.5 на своих поверхностях, лежащих в плоскостях (фиг. 20), или по всей своей периферии (фиг. 21). Отдельные слои могут быть получены с помощью различных способов производства, таких как тафтинг, шитье и т.д. Подходящие материалы включают в себя, например, углеродное волокно, стекловолокно, арамидное волокно, базальт, натуральные типы волокон и т.д. Поскольку каждый из этих материалов обеспечивает различные преимущества, также возможны их комбинации. Например, углеродное волокно обеспечивает высокую устойчивость, но является дорогим. Стекловолокно обладает легким весом, арамид является безосколочным, а базальт является химически устойчивым в соленой воде, т.е. не требует особой обработки. Материал слоя, а также толщина, выполнение и/или ориентация слоев, определяют ответную реакцию гибкой крыльевой области 21.2 при нагрузках. В наиболее простом случае вся гибкая крыльевая область 21.2 может быть выполнена из твердого изотопического материала.
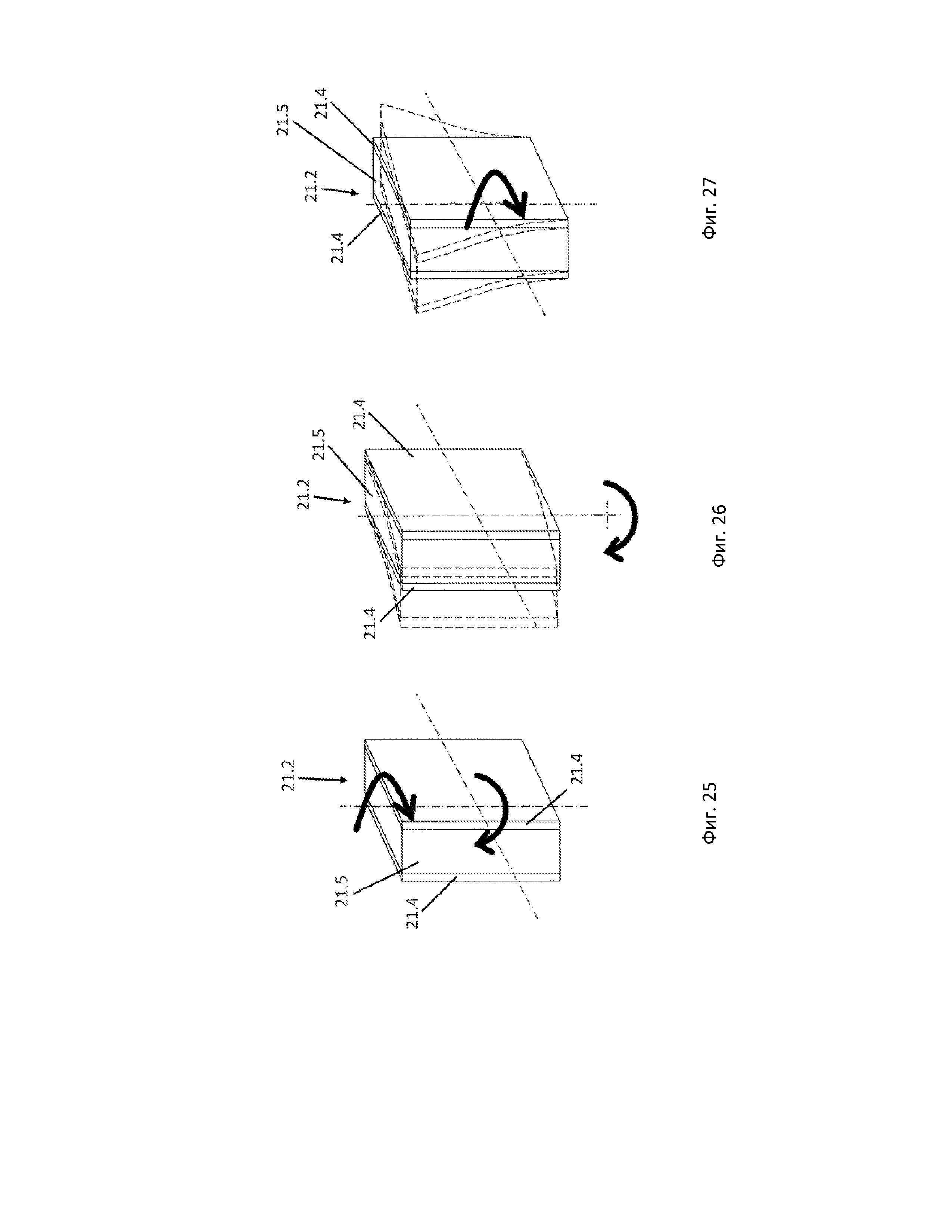
В зависимости от желаемой степени отклонения, гибкий элемент 21.5 сердцевины может быть сужен, как показано на фиг. 22-24. На этих фигурах показаны ответные реакции суженной гибкой крыльевой области 21.2 в условиях различных нагрузок. В качестве альтернативы, может быть использован компонент 21.5 сердцевины, лежащий в плоскости. Ответные реакции гибкой крыльевой области 21.2, лежащей в плоскости, в условиях различной нагрузки, показаны на фигурах 25-27.
Гибкие крыльевые области 21.2 позволяют уменьшить количество используемых соединителей и пружин, что может упростить конструкцию плавучего средства и сделать его менее склонным к неправильному функционированию. В дополнение, гибкие крыльевые области 21.2 могут обеспечить некоторую степень демпфирования ударов и вибраций.
Вышеописанные варианты реализации плавучего средства согласно настоящему изобретению демонстрируют его универсальность, являющуюся результатом значительных возможностей его изменения. Например, различные варианты регулирования обеспечивают возможность поддержания устойчивого положения в воде, одновременно обеспечивая хорошую динамику хода в широком диапазоне условий.