Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ
Вид РИД
Изобретение
Способ относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения, и может быть использован для определения местоположения абонентского терминала (AT) спутниковой связи посредством приема и обработки его сигналов принятых от спутников-ретрансляторов (CP) на низкой околоземной орбите.
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов [1]. Указанный способ заключается в том, что на основе измерений временных задержек и частотных сдвигов между переданными и принятыми тестовыми сигналами системы, с учетом известных координат первого и второго спутников-ретрансляторов CP1, СР2, векторов их скоростей  ,
,  , координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования
, координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования  ,
,  рабочих частот СР1 СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
рабочих частот СР1 СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
Для реализации указанного известного способа выполняют следующие действия:
определяют расстояние  между первым CP1 и ПТ;
между первым CP1 и ПТ;
определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
измеряют модуль  , азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
, азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
вычисляют в УМС доплеровские сдвиги частот  и
и  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат СР1 СР2 и определенных параметров
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат СР1 СР2 и определенных параметров  и
и  ;
;
определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого CP1 относительно ПТ, и/или радиальную скорость
перемещения первого CP1 относительно ПТ, и/или радиальную скорость  перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот
перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот  и
и  ;
;
вычисляют широту ϕПТ и долготу λПТ ПТ.
Недостатками способа определения местоположения ПТ с использованием двух спутников-ретрансляторов [1] являются:
длительное время определения координат ЗС, связанное с необходимостью проведения дополнительных измерений модуля, азимута вектора скорости ПТ и его высоты относительно земной поверхности,
необходимость ответной передачи тестовых сигналов с ПТ, чьи координаты необходимо определить в УМС через СР.
Известен способ определения местоположения земной станции спутниковой связи [2], заключающийся в том, что координаты земной станции (ЗС) определяют на основе анализа условий распространения радиоволн на трассе ЗС-СР. Падение уровня сигналов связывают с ослаблением при прохождении трассы ЗС-СР через области объемно распределенных гидрометеоров (ООРГ). Выявляют сходство замираний амплитуды между искомой и хотя бы одной из опорных ЗС.
Для реализации указанного известного способа выполняют следующие действия:
принимают и измеряют параметров ретранслируемых сигналов земных станций спутниковой связи на станции спутникового радиоконтроля (ССРК), в дискретные моменты времени;
измеряют уровни ретранслируемых сигналов от одновременно работающих через CP опорных земных станций (ОЗС) спутниковой связи с известными географическими координатами и искомой ЗС;
регистрируют результаты измерений в виде последовательностей дискретных отсчетов, равных уровням сигналов;
с помощью визуального анализа этих зависимостей выявляют долговременные циклические повторения падения уровня сигналов на фоне короткоживущих высокочастотных компонентов;
связывают падение уровня сигналов с их ослаблением при прохождении трасс ЗС-СР через области ООРГ;
выявляют сходства падений уровней сигналов между искомой ЗС и хотя бы одной из ОЗС;
причиной данного сходства считают прохождение трасс ЗС-СР и ОЗС-СР через одну и ту же область ООРГ с ограниченным размером занимаемого пространства;
в качестве условия прохождения разных трасс ЗС-СР через ООРГ с такими характеристиками принимают территориальную близость ЗС и ОЗС;
определяют привязкой к географическим координатам выявленной ОЗС район наиболее вероятного местоположения искомой ЗС;
осуществляют окончательный поиск и локализацию искомой ЗС относительно выявленной ОЗС в радиусе горизонтальной протяженности проекции локальной однородной ООРГ на Землю.
К недостаткам способа определения местоположения земной станции спутниковой связи [2] относят:
длительное время определения координат ЗС, связанное с необходимостью многократного измерения уровней ретранслируемых сигналов ЗС и множества ОЗС, поиска вероятных ООРГ и взаимного сравнения результатов измерения;
высокую стоимость устройства, реализующего способ, обусловленную необходимостью размещения на борту навигационных CP дополнительных передатчиков, приемников, а также аппаратуры обработки информации.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по технической сущности является система, способ и пользовательский терминал в системе однозначного определения местоположения с использованием двух спутников на низкой околоземной орбите [3]. Для реализации данного способа выполняют следующую последовательность действий:
определяют параметр дальности, представляющий собой расстояние между одним из CP и AT,
определяют параметр разности дальностей, представляющий собой разность расстояний одного и другого CP от AT,
определяют по меньшей мере один из следующих параметров: параметр скорости изменения дальности, представляющий собой радиальную скорость одного из CP относительно AT, параметр разность скоростей изменения дальностей, представляющий собой разность радиальных скоростей одного и другого CP относительно AT,
упомянутый параметр дальности определяют по задержке распространения сигнала, так что этап определения параметра дальности дополнительно включает этап измерения в УМС задержки распространения сигнала от этого узла к AT через один из CP и ретрансляции сигнала от AT к УМС через один из CP,
упомянутый параметр разности дальностей определяют по разности задержек распространения сигнала, так что этап определения параметра разности дальностей дополнительно включает этап измерения в AT разности задержек между первым сигналом, принятым от УМС через один из CP, и вторым сигналом, принятым от УМС через другой CP,
один из двух указанных сигналов предварительно корректируют по времени для компенсации задержек, связанных с разностью расстояний одного и другого CP от УМС, а в УМС предварительно настраивают разность задержек для компенсации задержек, связанных с разностью расстояний одного и другого CP от УМС,
этап определения параметра скорости изменения дальности дополнительно включает этап измерения в AT частоты первого сигнала, принимаемого от УМС через один из CP, этап передачи результата частотного измерения первого сигнала в УМС, этап передачи второго сигнала от AT к УМС через один из CP и этап измерения в УМС частоты второго сигнала, принимаемого от AT через один из CP, причем указанный параметр скорости изменения дальности представляет собой результат измерения частоты первого и второго сигналов,
этап определения параметра разности скоростей изменения дальностей включает этап передачи первого сигнала из УМС к AT через один из CP и передачи второго сигнала из УМС к AT через другой CP, а также этап измерения в AT разности частот первого сигнала и второго сигнала,
по меньшей мере один из двух указанных сигналов предварительно корректируют по частоте для компенсации доплеровского сдвига, обусловленного разностью радиальных скоростей одного и другого CP относительно УМС, а в УМС настраивают разность частот для компенсации доплеровских сдвигов, обусловленных разностью радиальных скоростей одного и другого CP относительно УМС,
определяют положения AT на поверхности Земли на основе известных местоположений и известных скоростей спутников-ретрансляторов, а также указанных параметра дальности, параметра скорости изменения дальностей и по меньшей мере одного из упомянутых параметров разности дальностей и разности скоростей изменения дальностей.
Недостатками способа прототипа являются:
относительно невысокая точность определения координат AT;
необходимость ответной передачи тестовых сигналов с AT, чьи координаты необходимо определить в КРМ через СР.
Целью изобретения является разработка способа определения местоположения AT с помощью не менее двух спутников-ретрансляторов (Q ≥2) на низкой околоземной орбите, обеспечивающего более высокую точность определения координат AT за счет более точного определения временных задержек и частотных сдвигов сигналов системы, проведения избыточных измерений и одновременно исключающего необходимость ответной передачи тестовых сигналов с AT.
Поставленная цель достигается тем, что в известном способе определения местоположения AT с помощью Q ≥2, где - число используемых CP на низкой околоземной орбите включающим: размещение комплекса радиоэлектронного мониторинга (КРМ), содержащего приемную и передающую аппаратуру, на позиции с известными координатами xК, уК, zK, выбор в качестве объекта радиоэлектронного мониторинга два CP S1 и S2 с известными номиналами частот конвертирования  и
и  соответственно, излучения с помощью аппаратуры КРМ тестовых радиосигналов с номиналами средних частот (НСЧ)
соответственно, излучения с помощью аппаратуры КРМ тестовых радиосигналов с номиналами средних частот (НСЧ)  и
и  в направлении на первый и второй CP соответственно в момент времени t1 измерение в КРМ НСЧ
в направлении на первый и второй CP соответственно в момент времени t1 измерение в КРМ НСЧ  и
и  реализации радиосигнала принятого от AT через первый и второй CP соответственно в моменты времени
реализации радиосигнала принятого от AT через первый и второй CP соответственно в моменты времени  и
и  , расчет разности дальностей
, расчет разности дальностей  от первого и второго CP до AT на основе запомненных значений моментов времени
от первого и второго CP до AT на основе запомненных значений моментов времени  и
и  , расчет разности радиальных скоростей
, расчет разности радиальных скоростей  первого и второго CP относительно AT на основе запомненных значений НСЧ
первого и второго CP относительно AT на основе запомненных значений НСЧ  и
и  , вычисление местоположения AT на поверхности земли по известным координатам КРМ xК, уК, zK, номиналам частот конвертирования
, вычисление местоположения AT на поверхности земли по известным координатам КРМ xК, уК, zK, номиналам частот конвертирования  и
и  , а также рассчитанным разности дальностей
, а также рассчитанным разности дальностей  и разности радиальных скоростей
и разности радиальных скоростей  в момент времени t1, дополнительно устанавливают на земной поверхности М≥2 излучающих опорных реперных станции (ИОРС) на позициях с известными координатами хIm, уIm, zIm, где m=1…М-номер ИОРС.
в момент времени t1, дополнительно устанавливают на земной поверхности М≥2 излучающих опорных реперных станции (ИОРС) на позициях с известными координатами хIm, уIm, zIm, где m=1…М-номер ИОРС.
Для выбора Q≥2 CP с известными номиналами частот конвертирования  в качестве объектов радиоэлектронного мониторинга предварительно задают район ведения радиомониторинга (РВРМ), как область на поверхности земли, в которой необходимо определить местоположение AT и выбирают n-е моменты времени tn, где n=1…N, N≥1, при которых зоны освещенности q-x CP охватывают и КРМ, и РВРМ, и позиции всех m-х ИОРС.
в качестве объектов радиоэлектронного мониторинга предварительно задают район ведения радиомониторинга (РВРМ), как область на поверхности земли, в которой необходимо определить местоположение AT и выбирают n-е моменты времени tn, где n=1…N, N≥1, при которых зоны освещенности q-x CP охватывают и КРМ, и РВРМ, и позиции всех m-х ИОРС.
Определяют n-e, канонические параметры (КП) q-x CP, включающие координаты CP  ,
,  ,
,  и ортогональные составляющие вектора его скорости
и ортогональные составляющие вектора его скорости  ,
,  ,
,  на основе излучения тестовых радиосигналов КРМ и m-ми ИОРС в моменты времени tn в направления на q-e CP и их последующего приема КРМ после переизлучения указанными СР.
на основе излучения тестовых радиосигналов КРМ и m-ми ИОРС в моменты времени tn в направления на q-e CP и их последующего приема КРМ после переизлучения указанными СР.
Измеряют в КРМ номиналы средних частот  (q≠1, q≠2 при n=1) реализаций радиосигналов принятых от AT через q-e CP соответственно в моменты времени
(q≠1, q≠2 при n=1) реализаций радиосигналов принятых от AT через q-e CP соответственно в моменты времени  .
.
Рассчитывают N × (Q-1) разностей дальностей  , где g=1…Q,
, где g=1…Q,
g≠q от q-го и q-го CP до AT на основе координат КРМ хК, уК zК, координат q-x
и g-x CP, запомненных значений моментов времени  .
.
Рассчитывают N × (Q - 1) разностей радиальных скоростей  , g≠q между q-м и g-м CP относительно AT на основе координат КРМ хК, уК, zK, КП q-x и g-x CP, номиналов частот конвертирования
, g≠q между q-м и g-м CP относительно AT на основе координат КРМ хК, уК, zK, КП q-x и g-x CP, номиналов частот конвертирования  , запомненных значений НСЧ
, запомненных значений НСЧ  .
.
Выбирают в качестве поверхности земли сферу с радиусом  , рассчитываемым на основе средней широты РВРМ ϕА.
, рассчитываемым на основе средней широты РВРМ ϕА.
Определяют местоположение AT на поверхности земли с использованием n-х КП q-x CP, N×(Q-1) разностей дальностей  , N × (Q - 1) разностей радиальных скоростей
, N × (Q - 1) разностей радиальных скоростей  и радиуса сферы поверхности земли
и радиуса сферы поверхности земли  .
.
В свою очередь, для определения n-х КП q-x CP в моменты времени tn, предварительно излучают с помощью аппаратуры КРМ тестовые радиосигналы с НСЧ  (q≠1, q≠2 при n-1) в направления на q-e CP в моменты времени tn. Излучают m-ми ИОРС тестовые радиосигналы с НСЧ
(q≠1, q≠2 при n-1) в направления на q-e CP в моменты времени tn. Излучают m-ми ИОРС тестовые радиосигналы с НСЧ  в направления на q-e CP в моменты времени tn.
в направления на q-e CP в моменты времени tn.
Принимают с помощью КРМ переизлученпые q-ми CP тестовые радиосигналы с НСЧ  и
и  в моменты времени
в моменты времени  и
и  соответственно.
соответственно.
Передают в КРМ НСЧ тестовых радиосигналов  от m-х ИОРС.
от m-х ИОРС.
Определяют задержки во времени  и
и  между излученными и принятыми тестовыми радиосигналами.
между излученными и принятыми тестовыми радиосигналами.
Измеряют наклонные дальности от q-x CP до КРМ  и до m-х ИОРС
и до m-х ИОРС  соответствующие моментам времени tn.
соответствующие моментам времени tn.
Рассчитывают координаты q-x CP  ,
,  ,
,  в моменты времени tn по известным координатам КРМ и m-х ИОРС, а также измеренным наклонным дальностям
в моменты времени tn по известным координатам КРМ и m-х ИОРС, а также измеренным наклонным дальностям  , и
, и  .
.
Измеряют радиальные скорости q-x CP относительно КРМ и m-х ИОРС
и m-х ИОРС  в моменты времени tn на основе известных координат КРМ и m-х ИОРС, рассчитанных координат q-x CP
в моменты времени tn на основе известных координат КРМ и m-х ИОРС, рассчитанных координат q-x CP  ,
,  ,
,  , а также запомненных НСЧ переданных
, а также запомненных НСЧ переданных  ,
,  и принятых
и принятых  и
и  тестовых радиосигналов.
тестовых радиосигналов.
Вычисляют ортогональные составляющие векторов скорости q-x CP  ,
,  ,
,  в моменты времени tn используя известные координаты КРМ и m-х ИОРС, вычисленные координаты q-x CP
в моменты времени tn используя известные координаты КРМ и m-х ИОРС, вычисленные координаты q-x CP  ,
,  ,
,  и измеренные радиальные скорости
и измеренные радиальные скорости  и
и  .
.
В качестве n-х КП q-x CP принимают совокупности координат q-x CP  ,
,  ,
,  и ортогональных составляющих векторов их скоростей
и ортогональных составляющих векторов их скоростей  ,
,  ,
,  в моменты времени tn.
в моменты времени tn.
Благодаря перечисленной новой совокупности существенных признаков, при использовании тестовых радиосигналов МИОРС на позициях с известными координатами достигается цель изобретения: обеспечение высокой точности определения координат AT за счет более точного определения временных задержек и частотных сдвигов сигналов системы, проведения избыточных измерений и одновременно исключающего необходимость ответной передачи тестовых сигналов с AT.
Заявленный способ поясняется чертежами, на которых показаны:
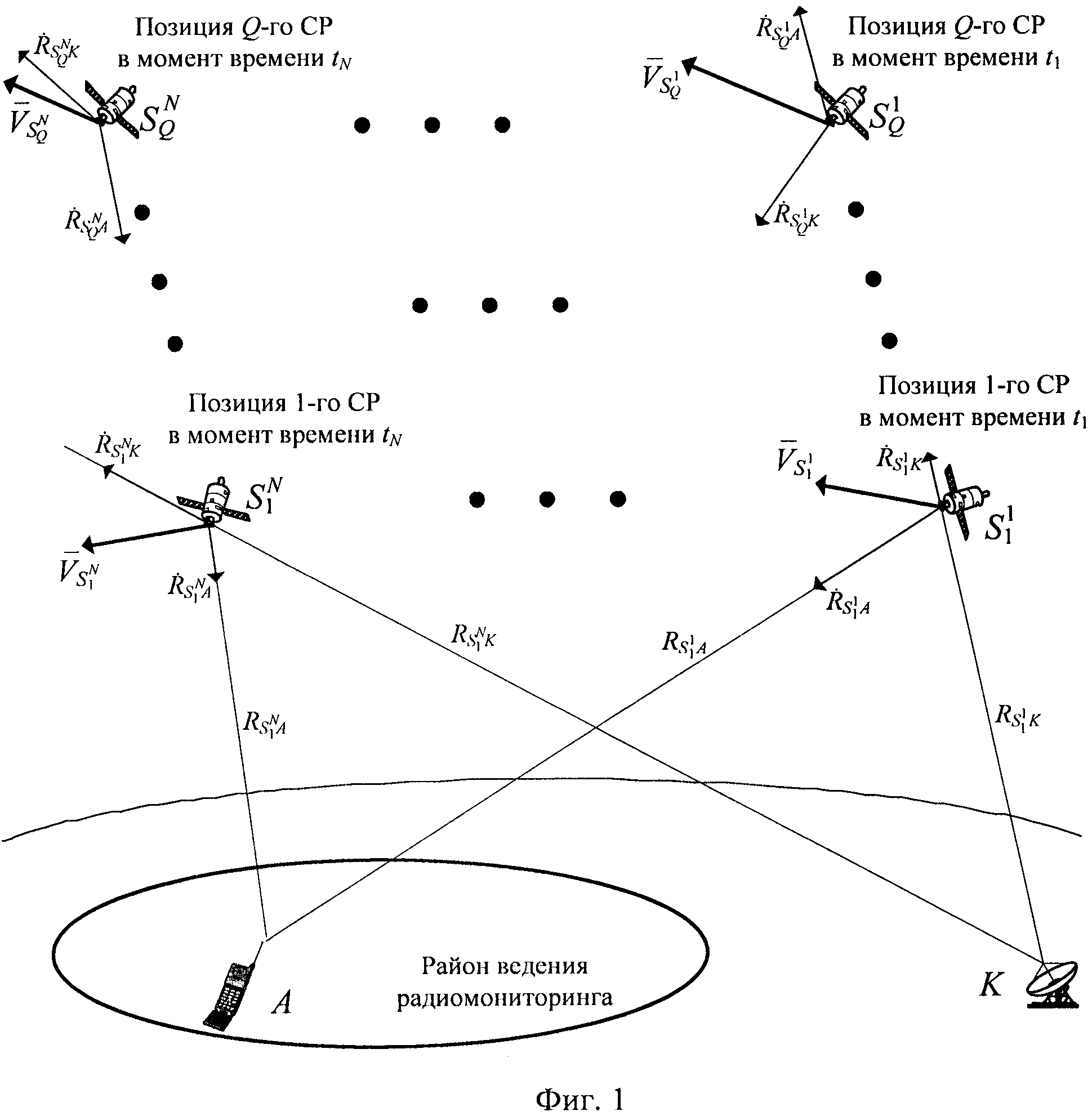
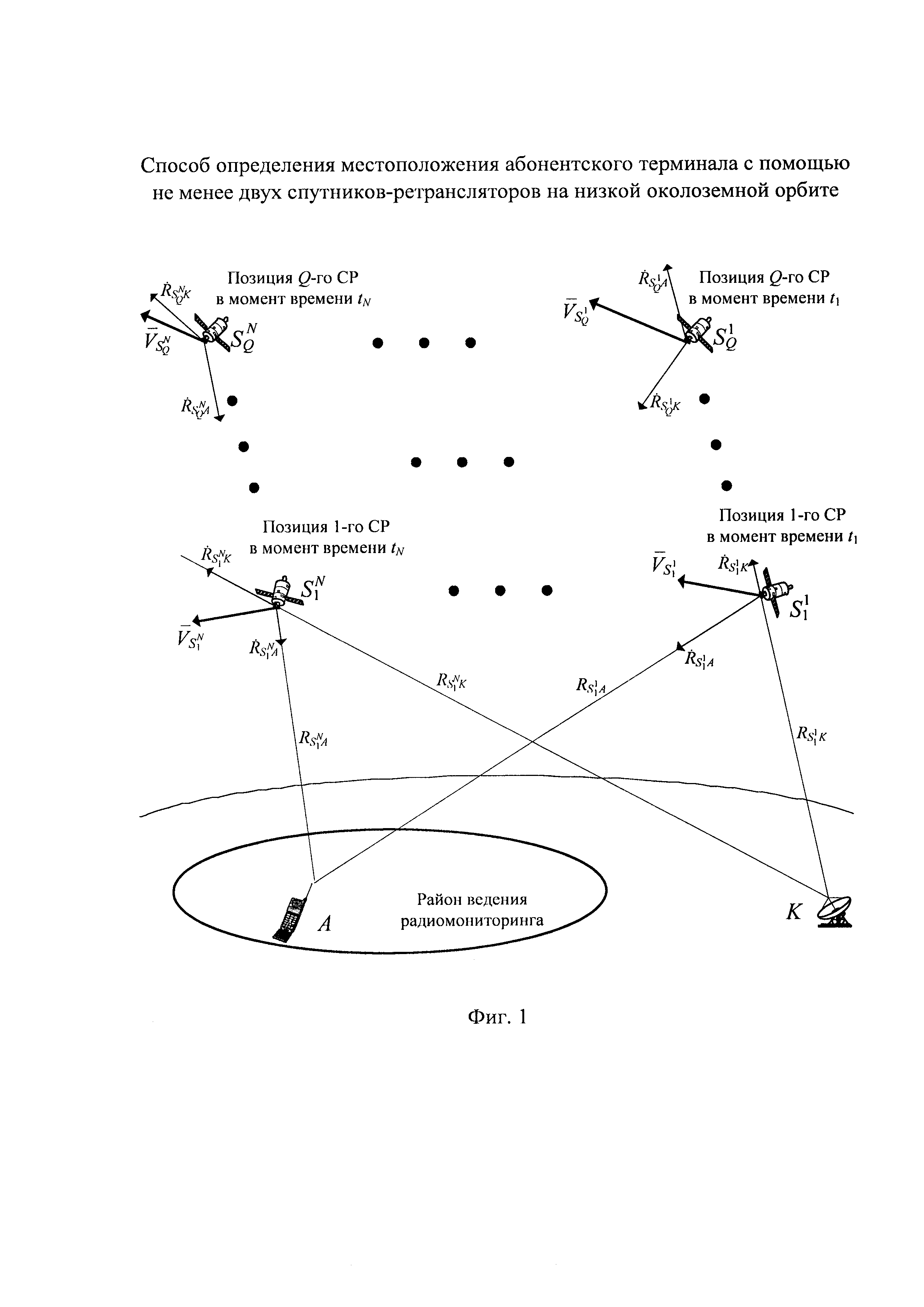
на фиг. 1 - типовая схема ведения радиомониторинга,
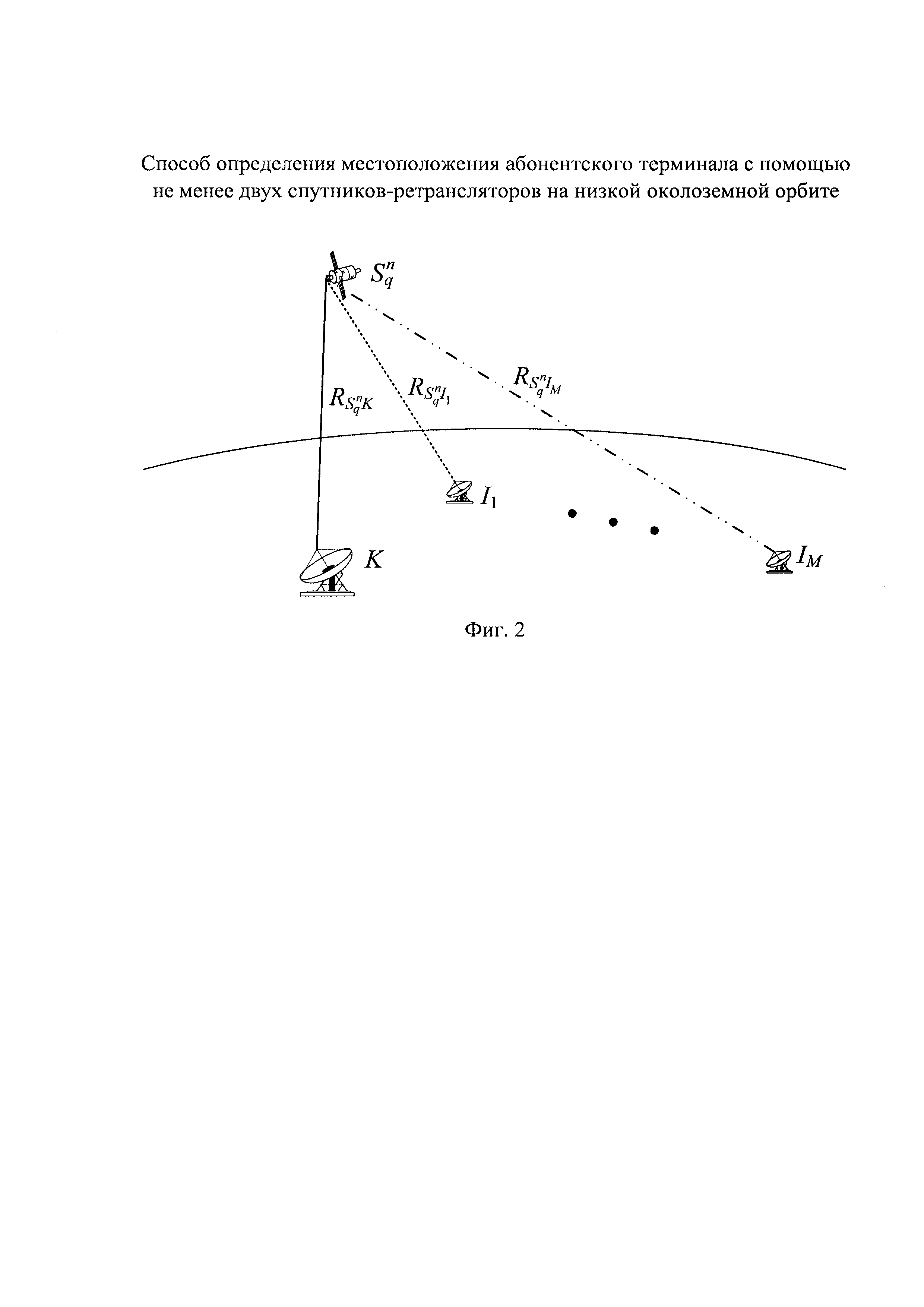
на фиг. 2 - схема подсистемы определения координат CP  ,
,  ,
,  в моменты времени tn,
в моменты времени tn,
на фиг. 3 - схема алгоритма определения координат CP  ,
,  ,
,  в моменты времени tN при использовании двух ИОРС,
в моменты времени tN при использовании двух ИОРС,
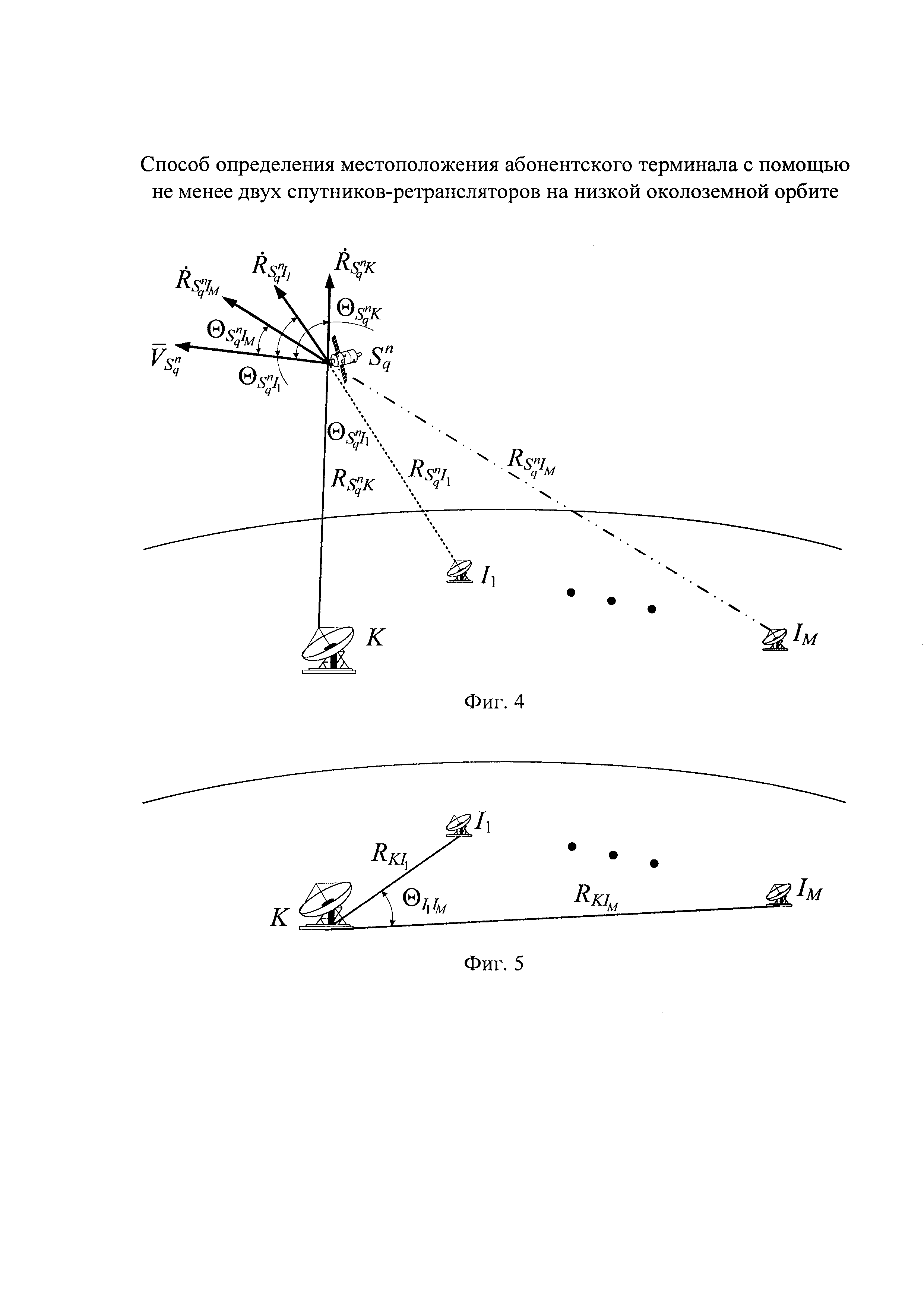
на фиг. 4 - схема подсистемы определения ортогональных составляющих вектора скорости CP  ,
,  ,
,  в моменты времени tn,
в моменты времени tn,
на фиг. 5 - топология размещения КРМ и МИОРС.
Для реализации заявленного способа определения местоположения AT используют Q≥2 CP, а измерения проводят в моменты времени tn где n=1…N, a N≥1 - номер временного отсчета, соответствующих положению CP, при котором и КРМ, и РВРМ, и позиции всех М ИОРС находились бы в зоне радиовидимости (ЗРВ) указанных СР.
На фиг. 1 представлена типовая схема ведения радиомониторинга включающая Q≥2 CP в моменты времени tn, КРМ К, AT А. Каждая позиция каждого CP обозначена буквой S с нижним индексом, обозначающим номер CP q=1…Q и верхним индексом, обозначающим номер момента времени n=1…N. Показаны позиции только 1-го и Q-гo CP в моменты времени t1 и tN  ,
,  ,
,  и
и  соответственно, остальные позиции q-x CP в остальные n-е моменты времени предполагаются и показаны троеточиями.
соответственно, остальные позиции q-x CP в остальные n-е моменты времени предполагаются и показаны троеточиями.
На фиг. 1 введены следующие обозначения:  ,
,  - расстояния от КРМ до 1 - го CP в моменты времени t1 и tN;
- расстояния от КРМ до 1 - го CP в моменты времени t1 и tN;  ,
,  ,
,  - расстояния от AT до 1-го CP в моменты времени t1 и tN;
- расстояния от AT до 1-го CP в моменты времени t1 и tN;  ,
,  ,
,  ,
,  - векторы скорости 1-го и Q-гo CP в моменты времени t1 и tN;
- векторы скорости 1-го и Q-гo CP в моменты времени t1 и tN;  ,
,  ,
,  ,
,  - радиальные скорости 1-го и Q-го CP относительно КРМ в моменты времени t1 и tN;
- радиальные скорости 1-го и Q-го CP относительно КРМ в моменты времени t1 и tN;  ,
,  ,
,  ,
,  - радиальные скорости 1-го и Q-го CP относительно AT в моменты времени t1 и tN.
- радиальные скорости 1-го и Q-го CP относительно AT в моменты времени t1 и tN.
КРМ является стационарным, его координаты хК, уК, zK, считают известными.
Предполагают, что AT размещен в предварительно выбранном РВРМ.
Заявленный способ определения местоположения AT основан на использовании n-х КП q-x CP в различные моменты времени tn, что накладывает требования к точности определения указанных n-х КП q-x СР.
Теория полета CP, или, как ее еще называют, астродинамика, небесная механика, космическая баллистика, основана на законах И. Кеплера и законе всемирного тяготения И. Ньютона.
В первом приближении движение CP представляется как невозмущенное - такое движение, которое происходило бы только под влиянием силы притяжения Земли по закону Ньютона, т.е. точно соответствует задаче двух тел (Земля - CP) в небесной механике. Это движение называется движением по Кеплеровой орбите, так как подчиняется трем законам Кеплера [4].
Достоинством Кеплеровых орбит является простота вычисления координат и вектора скорости q-x CP в прогнозируемые моменты времени. Это предопределило широкое использование элементов Кеплеровых орбит. В настоящем изобретении с помощью этих элементов выбирают q-e CP в качестве объекта радиоэлектронного мониторинга и выбирают n-е моменты времени tn, соответствующие положению CP, при котором и КРМ, и РВРМ, и позиции всех МИОРС находились бы в ЗРВ указанных СР.
Кроме того элементы Кеплеровых орбит q-x CP служат для ориентирования приемных и передающих антенн КРМ, а также передающих антенн всех М ИОРС на выбранные CP при передаче и приеме тестовых радиосигналов и приема радиосигналов AT, ретранслированных q-ми СР.
Недостатком Кеплеровых орбит является относительно низкая точность определения координат и векторов скорости q-x CP, которая в большинстве случаев недостаточна для реализации заявленного способа определения местоположения AT с помощью Q≥2 CP на низкой околоземной орбите.
Более точно n-e КП q-x CP, включающие координаты  ,
,  ,
,  и ортогональные составляющие вектора скорости
и ортогональные составляющие вектора скорости  ,
,  ,
,  в моменты времени tn, определяют по радиосигналам ИОРС, размещенных на позициях с известными координатами [5].
в моменты времени tn, определяют по радиосигналам ИОРС, размещенных на позициях с известными координатами [5].
На фиг. 2 и фиг. 4 представлены схемы подсистем определения координаты q-x CP  ,
,  ,
,  и ортогональных составляющих вектора его скорости
и ортогональных составляющих вектора его скорости  ,
,  ,
,  в моменты времени tn. Эти подсистемы состоят из КРМ и М≥2 ИОРС Im, размещенных на позициях с известными координатами
в моменты времени tn. Эти подсистемы состоят из КРМ и М≥2 ИОРС Im, размещенных на позициях с известными координатами  ,
,  ,
,  , где m=1…М - номер ИОРС.
, где m=1…М - номер ИОРС.
На фиг. 2 введены обозначения:  - расстояния между q-ми CP и КРМ,
- расстояния между q-ми CP и КРМ,  - расстояния между q-м CP и 1-й ИОРС,
- расстояния между q-м CP и 1-й ИОРС,  - расстояния между q-м CP и М-й ИОРС в моменты времени tn.
- расстояния между q-м CP и М-й ИОРС в моменты времени tn.
На фиг. 4 дополнительно введены обозначения:  - векторы скоростей q-x CP,
- векторы скоростей q-x CP,  - углы между векторами
- углы между векторами  и направлениями на КРМ,
и направлениями на КРМ,  - углы между векторами
- углы между векторами  и направлениями на 1-ю ИОРС,
и направлениями на 1-ю ИОРС,  - углы между векторами
- углы между векторами  и направлениями на М-ю ИОРС,
и направлениями на М-ю ИОРС,  - радиальные скорости q-x CP относительно КРМ,
- радиальные скорости q-x CP относительно КРМ,  - радиальные скорости q-x CP относительно 1-й ИОРС,
- радиальные скорости q-x CP относительно 1-й ИОРС,  - радиальные скорости q-x CP относительно М-й ИОРС, в моменты времени tn.
- радиальные скорости q-x CP относительно М-й ИОРС, в моменты времени tn.
Синхронность работы передатчиков КРМ и М ИОРС обеспечивают за счет использования меток времени высокостабильного генератора частот.
Для определения n-х КП q-x CP в момент времени tn используют временные задержки и частотные сдвиги тестовых радиосигналов [6].
В моменты времени tn синхронно излучают тестовые радиосигналы КРМ и М ИОРС с НСЧ  и
и  соответственно. Далее принимают в КРМ переизлученные CP тестовые радиосигналы в моменты времени
соответственно. Далее принимают в КРМ переизлученные CP тестовые радиосигналы в моменты времени  и
и  с НСЧ
с НСЧ  и
и  . Определяют в КРМ задержки во времени
. Определяют в КРМ задержки во времени  и
и  между излученными и принятыми тестовыми радиосигналами:
между излученными и принятыми тестовыми радиосигналами:

На основе полученных задержек во времени  и
и  измеряют наклонные дальности от q-x CP до КРМ
измеряют наклонные дальности от q-x CP до КРМ  и наклонные дальности от q-x CP до каждой из М ИОРС
и наклонные дальности от q-x CP до каждой из М ИОРС  для каждого момента времени tn:
для каждого момента времени tn:

где с=3×108 м/с - скорость света в вакууме.
С помощью полученных наклонных дальностей  и
и  определяют координаты q-x CP
определяют координаты q-x CP  ,
,  ,
,  в моменты времени tn.
в моменты времени tn.
Для одномоментного и однозначного определения координат q-x CP  ,
,  ,
,  в каждый момент времени tn, необходимо и достаточно измерить минимум три наклонные дальности, например,
в каждый момент времени tn, необходимо и достаточно измерить минимум три наклонные дальности, например,  ,
,  и
и  , следовательно, конфигурация подсистемы определения координат q-x CP должна включать минимум две ИОРС I1 и I2.
, следовательно, конфигурация подсистемы определения координат q-x CP должна включать минимум две ИОРС I1 и I2.
В качестве примера, для частного случая, когда количество ИОРС равно двум (М=2), в приложении А представлена аналитическая интерпретация алгоритма определения координат Q-гo CP  ,
,  ,
,  в момент времени tN. Алгоритмы определения координат q-x CP
в момент времени tN. Алгоритмы определения координат q-x CP  ,
,  ,
,  в моменты времени tn аналогичны алгоритму представленному в приложении А.
в моменты времени tn аналогичны алгоритму представленному в приложении А.
Дальнейшее увеличение количества ИОРС (М≥3) приводит к повышению точности определения координат q-x CP, но и к сопутствующему увеличению суммарной стоимости устройства, реализующего заявленный способ.
Алгоритм определения координат CP при использовании М≥3 ИОРС будет отличаться от алгоритма, описанного в приложении А, тем, что система (А.1), составляемая на этапе 6 приложения А, будет содержать М+1 (более четырех) линейных уравнений с тремя неизвестными. Тогда систему (А.1) решают одним из известных численных методов, например, методом наименьших квадратов.
Для одномоментного и однозначного определения ортогональных составляющих вектора скорости q-x CP  ,
,  ,
,  в каждый момент времени tn, необходимо и достаточно измерить минимум три радиальные скорости, например,
в каждый момент времени tn, необходимо и достаточно измерить минимум три радиальные скорости, например,  ,
,  и
и  , следовательно, конфигурация подсистемы определения ортогональных составляющих вектора скорости CP должна включать минимум две ИОРС I1 и I2.
, следовательно, конфигурация подсистемы определения ортогональных составляющих вектора скорости CP должна включать минимум две ИОРС I1 и I2.
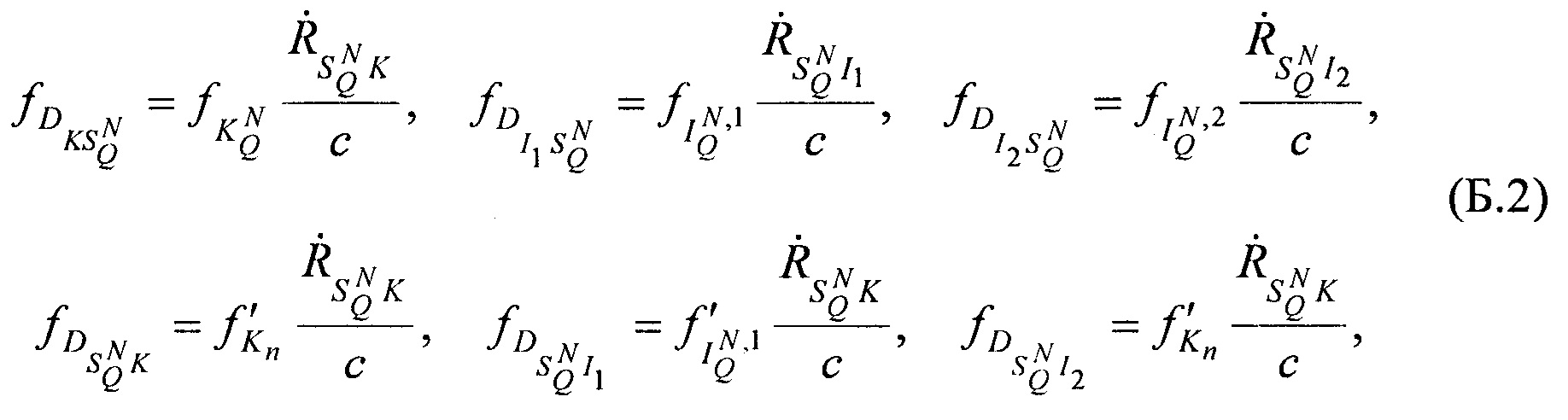
В качестве примера, для частного случая, когда количество ИОРС равно двум (М=2), в приложении Б представлена аналитическая интерпретация алгоритма определения ортогональных составляющих вектора скорости Q-го CP  ,
,  ,
,  в момент времени tN. Алгоритмы определения ортогональных составляющих векторов скорости q-x CP
в момент времени tN. Алгоритмы определения ортогональных составляющих векторов скорости q-x CP  ,
,  ,
,  в моменты времени аналогичны алгоритму представленному в приложении Б.
в моменты времени аналогичны алгоритму представленному в приложении Б.
Дальнейшее увеличение количества ИОРС (М≥3) приводит к повышению точности определения ортогональных составляющих вектора скорости CP, но и к сопутствующему увеличению суммарной стоимости устройства, реализующего заявленный способ.
Алгоритм определения ортогональных составляющих вектора скорости CP при использовании М≥3 ИОРС будет отличаться от алгоритма, описанного в приложении Б, тем, что система (Б.8), составляемая на этапе 3 в приложения Б, будет содержать М+1 (более четырех) линейных уравнений с тремя неизвестными. Тогда систему (Б.8) решают одним из известных численных методов, например, методом наименьших квадратов.
В качестве n-х КП q-x CP в моменты времени tn принимают совокупности координат q-x CP  ,
,  ,
,  и ортогональных составляющих векторов их скоростей
и ортогональных составляющих векторов их скоростей  ,
,  ,
,  .
.
Определение местоположения AT (расчет координат хА, уА, zA) в КРМ по заявляемому способу основывается на измерении НСЧ радиосигналов  , принятых от AT через q-e CP в моменты времени
, принятых от AT через q-e CP в моменты времени  .
.
Моменты времени  близкие между собой и моментами времени tn для каждого из n, но отличаются за счет разности траекторий
близкие между собой и моментами времени tn для каждого из n, но отличаются за счет разности траекторий  . Такие различия служат для расчета разностей N×Q дальностей
. Такие различия служат для расчета разностей N×Q дальностей  , где g=1…Q, g≠q от q-гo и g-гo CP до AT на основе координат КРМ хК, уК, zK, координат q-x и g-x CP, запомненных значений моментов времени
, где g=1…Q, g≠q от q-гo и g-гo CP до AT на основе координат КРМ хК, уК, zK, координат q-x и g-x CP, запомненных значений моментов времени  .
.
Предполагают, что AT в моменты времени tn излучает в направлении на q-e CP радиосигналы с постоянным НСЧ равным ƒА, однако, в КРМ этот НСЧ не известен.
НСЧ радиосигналов AT в моменты времени tn претерпевают следующие сдвиги на трассе  :
:
доплеровские сдвиги НСЧ радиосигналов AT на входе q-x CP  за счет его сближения (удаления) с (от) AT;
за счет его сближения (удаления) с (от) AT;
сдвиги НСЧ радиосигналов AT на предварительно заданную величину номинала частоты конвертирования  ;
;
доплеровские сдвиги НСЧ радиосигналов AT на выходе q-x CP  за счет его сближения (удаления) с (от) К.
за счет его сближения (удаления) с (от) К.
Считают, что нестабильность генератора частот CP в моменты времени tn известна и возможна ее компенсация. Влияние других эффектов на изменение частоты, например гравитационный и релятивистский эффекты в рамках рассматриваемого способа пренебрежимо малы и поэтому не учитывают.
Доплеровские сдвиги НСЧ радиосигналов AT на выходе q-x CP  за счет его сближения (удаления) с (от) К, рассчитываются на основе известных координат КРМ хК, уК, zK и КП CP определенных n-х КП СР.
за счет его сближения (удаления) с (от) К, рассчитываются на основе известных координат КРМ хК, уК, zK и КП CP определенных n-х КП СР.
В свою очередь доплеровские сдвиги НСЧ радиосигналов AT на входе CP  за счет сближения (удаления) CP с (от) AT используют для расчета N × Q разностей радиальных скоростей
за счет сближения (удаления) CP с (от) AT используют для расчета N × Q разностей радиальных скоростей  , g≠q между q-м и g-м CP относительно AT на основе координат КРМ хК, уК, zK, КП q-x и g-x CP, номиналов частот конвертирования
, g≠q между q-м и g-м CP относительно AT на основе координат КРМ хК, уК, zK, КП q-x и g-x CP, номиналов частот конвертирования  , запомненных значений НСЧ
, запомненных значений НСЧ  .
.
В качестве модели поверхности Земли выбирают сферу с переменным радиусом [8], зависящим от широты и определяемым из известного соотношения, который в РВРМ будет равен  , где
, где  =6 378 136 м - большая полуось эллипсоида Земли;
=6 378 136 м - большая полуось эллипсоида Земли;  радиус Земли на полюсе;
радиус Земли на полюсе;  - эксцентриситет эллипсоида Земли; λ3=1/298,257 84 - сжатие эллипсоида Земли, ϕА - средняя широта РВРМ.
- эксцентриситет эллипсоида Земли; λ3=1/298,257 84 - сжатие эллипсоида Земли, ϕА - средняя широта РВРМ.
На завершающем этапе рассчитывают координаты AT хА, уА, zA с использованием n-х КП q-x CP, N × (Q- 1) разностей дальностей  , N×(Q-1) разностей радиальных скоростей
, N×(Q-1) разностей радиальных скоростей  и радиуса сферы поверхности земли
и радиуса сферы поверхности земли  .
.
Для одномоментного и однозначного определения местоположения AT (расчета координат AT хА, уА, zA) на поверхности земли в ЗРВ, т.е. на сфере с радиусом  с помощью заявленного способа необходимо и достаточно предварительно вычислить минимум одну разность дальностей
с помощью заявленного способа необходимо и достаточно предварительно вычислить минимум одну разность дальностей  и одну разность радиальных скоростей
и одну разность радиальных скоростей  , следовательно, требуется наличие двух CP (Q=2) и проведение измерений в один момент времени (N=1).
, следовательно, требуется наличие двух CP (Q=2) и проведение измерений в один момент времени (N=1).
В качестве примера реализации заявленного способа в приложении В приводится аналитическая интерпретация алгоритма определения местоположения AT с помощью двух CP на низкой околоземной орбите для N=1, то есть для момента времени t1. В указанном примере в качестве опорных выбраны первые 1-й и 2-й CP для момента времени t1.
Дальнейшее увеличение количества используемых CP (Q≥2) и/или количества измерений (N≥2) приводит к повышению точности определения местоположения AT, но и к сопутствующему увеличению суммарной стоимости устройства, реализующего заявленный способ.
Алгоритм определения местоположения AT с помощью Q≥2 CP на низкой околоземной орбите для N≥1 моментов измерения будет аналогичен алгоритму, описанному в приложении В, с той лишь разницей, что система уравнений (В. 12), будет содержать более трех уравнений второго порядка с тремя неизвестными. Это в свою очередь приведет к тому, что последующая система линейных уравнений (В. 15) с тремя неизвестными будет включать более четырех уравнений. Тогда систему (В. 15) решают одним из известных численных методов, например, методом наименьших квадратов.
На точность определения местоположения AT с помощью заявленного способа оказывают влияние множество факторов, основными из которых являются:
количества используемых CP - Q;
топология размещения CP в моменты времени tn;
количество установленных на земной поверхности ИОРС - М;
топология размещения КРМ и m-х ИОРС;
точность синхронизации излучений КРМ и m-х ИОРС;
количество проводимых измерений N;
временные интервалы между моментами времени tg и  ;
;
погрешности измерения НСЧ переданных и принятых тестовых радиосигналов и принятых радиосигналов от AT;
Увеличение количества установленных на земной поверхности М ИОРС приводит к повышению точности определения координат q-x CP  ,
,  ,
,  и ортогональных составляющих их векторов скорости
и ортогональных составляющих их векторов скорости  ,
,  ,
,  в каждый моменты времени tn. Это в свою очередь способствует повышению точности определения местоположения AT.
в каждый моменты времени tn. Это в свою очередь способствует повышению точности определения местоположения AT.
Под топологией размещения КРМ и m-х ИОРС понимают совокупность таких параметров, как 1) расстояния между КРМ и m-ми ИОРС  , 2) величины углов
, 2) величины углов  , образованных отрезками
, образованных отрезками  и
и  , На фиг. 5, в качестве примера, представлена топология КРМ и М ИОРС, а также показаны расстояния
, На фиг. 5, в качестве примера, представлена топология КРМ и М ИОРС, а также показаны расстояния  ,
,  . и угол
. и угол  . Для повышения точности определения местоположения AT необходимо увеличивать расстояния
. Для повышения точности определения местоположения AT необходимо увеличивать расстояния  и увеличивать углы
и увеличивать углы  .
.
Высокую точность синхронизации излучений КРМ и m-х ИОРС и низкую погрешности измерения НСЧ переданных и принятых тестовых радиосигналов и принятых радиосигналов от AT обеспечивают за счет использования высокоточных генераторов частот в КРМ и m-х ИОРС.
При выборе количества проводимых измерений N и связанных с ним временных интервалов между моментами времени tg и решают противоречивую задачу: с одной стороны количество проводимых измерений необходимо увеличивать с целью повышения точности определения местоположения AT; с другой стороны увеличение проводимых измерений снижает производительность КРМ.
Произведено имитационное моделирование заявленного способа определения местоположения абонентского терминала с помощью одного спутника-ретранслятора на низкой околоземной орбите и способа-прототипа с помощью разработанных программ на ЭВМ [9, 10] при одинаковых исходных данных.
Результаты моделирования свидетельствуют о существенном повышении точности определения местоположения AT с помощью заявленного способа по сравнению со способом прототипом на 40…60% (в зависимости от топологии размещения КРМ, Q CP и М ИОРС, а также количества проведенных измерений N), при одновременном исключении необходимости ответной передачи тестовых сигналов с AT, что указывает на возможность достижения технического результата при использовании заявленного технического решения.
Источники информации
1. Волков Р.В., Саяпин В.Н., Севидов В.В. Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов. Патент RU №2 605 457, опубл. 20.12.2016 Бюл. №35.
2. Басукинский А.Б., Кизима С.В., Лисица Г.В., Митченков С.Г. Способ определения местоположения земной станции спутниковой связи. Патент RU №2 442 996, опубл. 20.02.2012 Бюл. №5.
3. Леванон Н., Виктор Э.Б., Вембу Ш. Система, способ и пользовательский терминал в системе однозначного определения местоположения с использованием двух спутников на низкой околоземной орбите. Патент RU №2 256 935, опубл. 20.07.2005 Бюл. №20.
4. Абалакин В.К. Астрономический календарь. Постоянная часть. - М.: Наука, 1981.-704 с.
5. Волков Р.В., Малышев С.Р., Симонов А.Н., Севидов В.В. Определение канонических параметров спутников-ретрансляторов по радиосигналам опорных реперных станций // Труды Военно-космической академии им. А.Ф. Можайского. 2016. Вып. 655. С. 88-92.
6. Кельян А.Х., Чемаров А.О., Волков Р.В., Севидов В.В. Определение параметров движения летательного аппарата системой геолокации по излучениям находящейся на его борту станции спутниковой связи // Успехи современной радиоэлектроники. 2016. №5. С. 10-14.
7. Волков Р.В., Саяиин В.Н., Севидов В.В. Модель измерения временной задержки и частотного сдвига радиосигнала, принятого от спутника-ретранслятора при определении местоположения земной станции // T-Comm: Телекоммуникации и транспорт.2016. Том 10. №9. С. 14-18.
8. Богдановский С.В., Волков Р.В., Севидов В.В., Теслевич С.Ф. Модель поверхности Земли при определении местоположения земной станции по сигналам спутников-ретрансляторов // Наукоемкие технологии. 2016. №12. С. 44-50.
9. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель движения искусственного спутника Земли // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2016. №2. С. 112.
10. Севидов В.В. Определение координат и параметров движения источника радиоизлучения на основе разностно-временных и разностно-доплеровских измерений // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2015. №11. С. 2.
Приложение А
Алгоритм определения координат спутника-ретранслятора при использовании двух ИОРС
Для расчета координат Q-гo CP  ,
,  ,
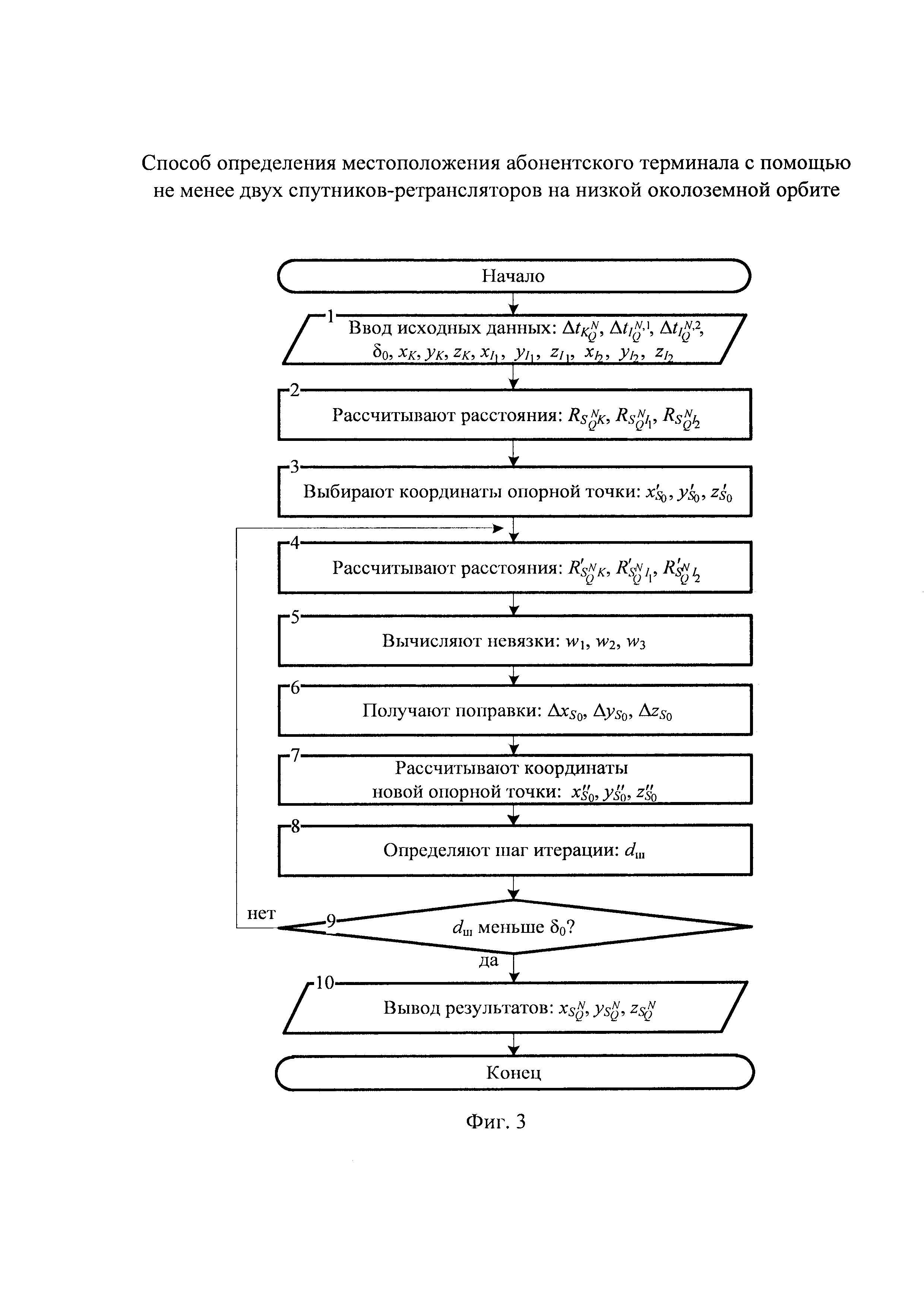
,  в момент времени tN, когда количество ИОРС равно двум (М=2) разработан алгоритм, схема которого представлена на фиг. 3.
в момент времени tN, когда количество ИОРС равно двум (М=2) разработан алгоритм, схема которого представлена на фиг. 3.
На этапе 1 производят ввод исходных данных, в качестве которых выступают координаты КРМ хК, уК, zK; координаты двух ИОРС  ,
,  ,
,  и
и  ,
,  ,
,  ; временные задержки между излученными КРМ, двумя ИОРС и принятыми КРМ тестовыми радиосигналами
; временные задержки между излученными КРМ, двумя ИОРС и принятыми КРМ тестовыми радиосигналами  ,
,  и
и  , предварительно определенные в соответствии с формулами (1); порог точности δ0 расчета координат Q-гo СР.
, предварительно определенные в соответствии с формулами (1); порог точности δ0 расчета координат Q-гo СР.
На этапе 2 рассчитывают расстояния  ,
,  и
и  по формулам (2).
по формулам (2).
На этапе 3 выбирают, на основе элементов Кеплеровой орбиты Q-гo CP, координаты опорной точки  ,
,  ,
,  .
.
На этапе 4 рассчитывают расстояния  ,
,  и
и  , при условии равенства координат Q-гo CP координатам опорной точки
, при условии равенства координат Q-гo CP координатам опорной точки  ,
,  ,
,  по формулам
по формулам
 ,
,
 ,
,
 .
.
На этапе 5 вычисляют невязки w1, w2 и w3 как разницы между расстояниями  ,
,  ,
,  , рассчитанными на этапе 4, и расстояниями
, рассчитанными на этапе 4, и расстояниями  ,
,  ,
,  , рассчитанными на этапе 2 соответственно
, рассчитанными на этапе 2 соответственно  ,
,  ,
,  .
.
На этапе 6 получают поправки к координатам Q-гo CP  ,
,  ,
,  для чего предварительно формируют систему линейных уравнений путем разложении в ряд Тейлора функций
для чего предварительно формируют систему линейных уравнений путем разложении в ряд Тейлора функций  ,
,  ,
,  , с точностью до первых членов, где в качестве переменных выступают поправки к координатам Q-гo CP
, с точностью до первых членов, где в качестве переменных выступают поправки к координатам Q-гo CP  ,
,  ,
,  :
:
где частные производные, в свою очередь, рассчитываются согласно выражениям
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Решают систему линейных уравнений (А.1) одним из известных методов, например методом Крамера, получают поправки к координатам Q-го CP  ,
,  ,
,  .
.
На этапе 7 рассчитывают координаты новой опорной точки  ,
,  ,
,  :
:
 ,
,  ,
,  .
.
Этапы 4…7 в совокупности составляют первую итерацию. Далее итерации повторяют, используя каждый раз координаты новой опорной точки, рассчитанные на предыдущей итерации. Количество необходимых итераций зависит требуемой точности определения координат Q-гo СР. С точностью определения координат Q-гo CP напрямую связан шаг итерации dш.
На этапе 8 определяют шаг итерации dш как расстояние между текущей и предыдущей опорными точками:

На этапе 9 сравнивают dm с порогом δ0, задаваемом на этапе 1. По результату сравнения либо выполняют следующую итерацию (этапы 4…7), если dш>δ0, либо переходят к этапу 10, если dш<δ0. Необходимое число итераций, как правило, составляет 2, … ,4.
На этапе 10 осуществляют вывод координат Q-гo CP  ,
,  ,
,  в качестве которых предварительно выбирают значения координат опорной точки на последней итерации.
в качестве которых предварительно выбирают значения координат опорной точки на последней итерации.
Приложение Б
Алгоритм определения ортогональных составляющих вектора скорости спутника-ретранслятора при использовании двух ИОРС
Для расчета ортогональных составляющих вектора скорости Q-гo CP  ,
,  ,
,  в момент времени tN, когда количество ИОРС равно двум (М=2) разработан алгоритм, основные этапы которого раскрыты ниже.
в момент времени tN, когда количество ИОРС равно двум (М=2) разработан алгоритм, основные этапы которого раскрыты ниже.
На этапе 1 производят ввод исходных данных, в качестве которых выступают: координаты КРМ хК, уК, zK; координаты двух ИОРС 
 ,
,  и
и 
 ,
,  ; координаты Q-гo CP
; координаты Q-гo CP  ,
,  ,
,  , рассчитанные в соответствии с алгоритмом, представленном в приложении А; НСЧ тестовых радиосигналов
, рассчитанные в соответствии с алгоритмом, представленном в приложении А; НСЧ тестовых радиосигналов  ,
,  ,
,  переданных КРМ и двумя ИОРС; НСЧ тестовых радиосигналов
переданных КРМ и двумя ИОРС; НСЧ тестовых радиосигналов  ,
,  ,
,  принятых КРМ после их переизлучения CP; номинал частоты конвертирования Q-гo CP
принятых КРМ после их переизлучения CP; номинал частоты конвертирования Q-гo CP  .
.
На этапе 2 рассчитывают значения радиальных скоростей  ,
,  и
и  Q-гo CP относительно КРМ, 1-й, 2-й ИОРС в момент времени tN.
Q-гo CP относительно КРМ, 1-й, 2-й ИОРС в момент времени tN.
Соотношения НСЧ  ,
,  ,
,  переданных тестовых радиосигналов КРМ и двумя ИОРС и
переданных тестовых радиосигналов КРМ и двумя ИОРС и  ,
,  ,
,  принятых тестовых радиосигналов КРМ после их переизлучения Q-м CP, имеют вид
принятых тестовых радиосигналов КРМ после их переизлучения Q-м CP, имеют вид
где  ,
,  и
и  - доплеровские сдвиги частот тестовых радиосигналов на входе Q-го CP за счет его сближения (удаления) с (от) КРМ, 1-й и 2-й ИОРС в момент времени tN,
- доплеровские сдвиги частот тестовых радиосигналов на входе Q-го CP за счет его сближения (удаления) с (от) КРМ, 1-й и 2-й ИОРС в момент времени tN, 
 и
и  - доплеровские сдвиги частот тестовых радиосигналов на выходе Q-гo CP за счет его сближения (удаления) с (от) КРМ, 1-й и 2-й ИОРС в момент времени tN.
- доплеровские сдвиги частот тестовых радиосигналов на выходе Q-гo CP за счет его сближения (удаления) с (от) КРМ, 1-й и 2-й ИОРС в момент времени tN.
Предполагают, что нестабильность генератора частот Q-го CP известна и компенсируется. Влияние других эффектов на изменение частоты, например гравитационный и релятивистский эффекты в рамках рассматриваемого способа пренебрежимо малы и поэтому не учитывают.
Выражения для доплеровских сдвигов частот тестовых радиосигналов  ,
,  и
и  на входе Q-го CP и для доплеровских сдвигов частот тестовых радиосигналов
на входе Q-го CP и для доплеровских сдвигов частот тестовых радиосигналов  ,
,  и
и  на выходе Q-го CP, с учетом того, что
на выходе Q-го CP, с учетом того, что  ,
,  и
и  , имеют следующие виды:
, имеют следующие виды:
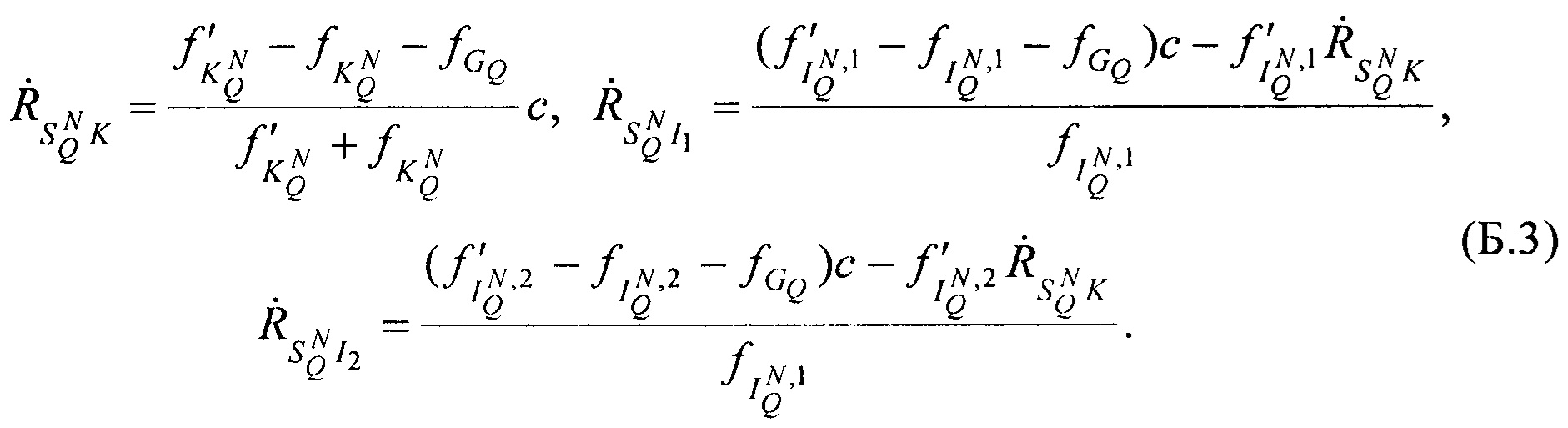
Из равенств (Б.1) и (Б.2) получают выражения для расчета радиальных скоростей  ,
,  и
и  :
:
На этапе 3 рассчитывают ортогональные составляющие вектора скорости Q-го CP  ,
,  ,
,  .
.
Справедливы тождества, связывающие радиальные скорости  ,
,  и
и  с вектором скорости CP
с вектором скорости CP  , через углы
, через углы  ,
,  и
и  :
:
Согласно теореме о скалярном произведении векторов
Модуль вектора скорости Q-гo CP в момент времени tN равен:

а расстояния от КРМ, 1-й, 2-й ИОРС до Q-гo CP  ,
,  ,
,  рассчитывают как
рассчитывают как
Выражения (Б.1) с учетом уравнений (Б.4)…(Б.7) преобразуют в систему линейных уравнений:
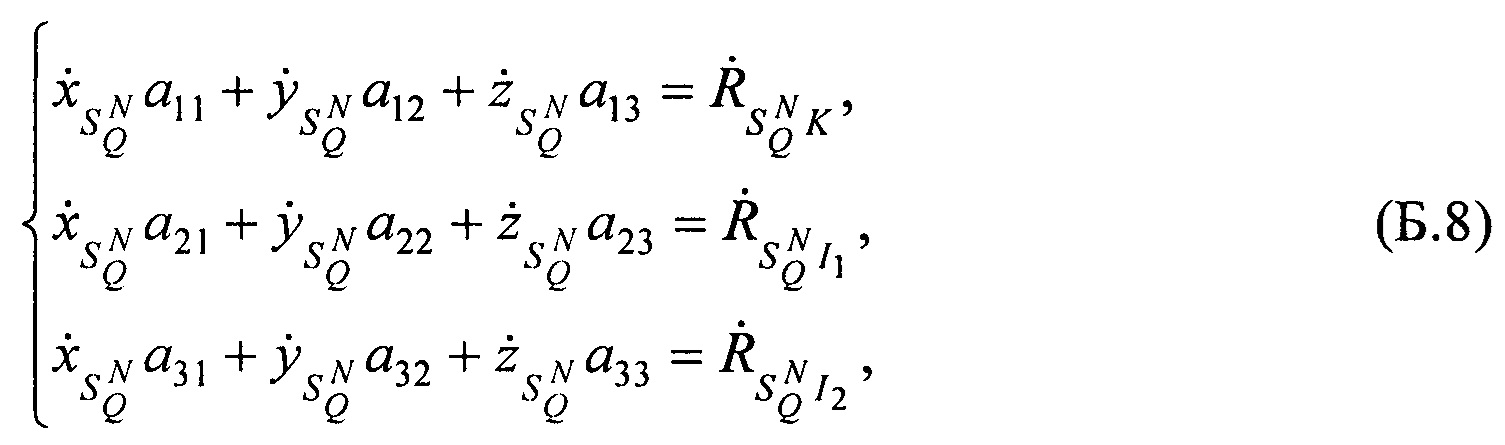
где коэффициенты при переменных  ,
,  ,
,  равны:
равны:
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Систему из трех линейных уравнений (Б.8) с тремя неизвестными решают одним из известных методов, например, методом Крамера. Результатом решения системы уравнений (Б.8) выступают ортогональные составляющие вектора скорости Q-гo CP  ,
,  ,
,  .
.
Приложение В
Алгоритм определения местоположения AT с помощью 1-го и 2-го CP на низкой околоземной орбите для момента измерения t1
В качестве исходных данных разработанного алгоритма выступают: координаты КРМ хК, уК, zK; КП 1-го и 2-го CP - координаты 1-го и 2-го CP  ,
,  ,
,  ,
,  ,
,  ,
,  и ортогональные составляющие вектора их скорости
и ортогональные составляющие вектора их скорости  ,
,  ,
,  ,
,  ,
,  ,
,  , в момент времени t1; радиус сферы поверхности земли
, в момент времени t1; радиус сферы поверхности земли .
.
Предполагают, что AT в моменты времени t1 излучает в направлении на 1-й и 2-й CP радиосигналы с постоянным НСЧ равным ƒА, однако, в КРМ этот НСЧ не известен.
В КРМ измеряют НСЧ радиосигналов  и
и  принятых от AT через 1-й и 2-й CP в моменты времени
принятых от AT через 1-й и 2-й CP в моменты времени  и
и  .
.
Моменты времени  и
и  близкие между собой и моментом времени t1 но отличаются за счет разности траекторий
близкие между собой и моментом времени t1 но отличаются за счет разности траекторий  и
и  . Следовательно, можно составить тождество:
. Следовательно, можно составить тождество:

где выражение в первых скобках - длина траектории  , выражение во вторых скобках - длина траектории
, выражение во вторых скобках - длина траектории  .
.
Рассчитывают расстояния  и
и  , используя выражения:
, используя выражения: 
Составляют систему уравнений, связывающую  и
и  , с неизвестными координатами А хА,уА и zA:
, с неизвестными координатами А хА,уА и zA:

Произведя вычет из второго уравнения системы (В.3) первое получают:

где коэффициент в правой части  - разность дальностей от 2-го и 1-го CP до AT в момент времени t1, которая, в соответствии с (В.1), равна:
- разность дальностей от 2-го и 1-го CP до AT в момент времени t1, которая, в соответствии с (В.1), равна:

Вместе с тем указанные НСЧ  и
и  представляют в виде:
представляют в виде:

где  ,
,  - доплеровские сдвиги частот радиосигналов AT на входе 1-го и 2-го CP за счет их сближения (удаления) с (от) AT в момент времени t1,
- доплеровские сдвиги частот радиосигналов AT на входе 1-го и 2-го CP за счет их сближения (удаления) с (от) AT в момент времени t1,  и
и  - номиналы частот конвертирования 1-го и 2-го CP,
- номиналы частот конвертирования 1-го и 2-го CP,  ,
,  - доплеровские сдвиги частот радиосигналов AT на выходе 1-го и 2-го CP за счет их сближения (удаления) с (от) К в моменты времени tn.
- доплеровские сдвиги частот радиосигналов AT на выходе 1-го и 2-го CP за счет их сближения (удаления) с (от) К в моменты времени tn.
Для компенсации неизвестного НСЧ радиосигнала AT ƒA на основе тождеств (В.5) составляют разностное уравнение:

Поскольку справедливы неравенства  ,
,  и
и  ,
,  , то выражения для расчета доплеровских сдвигов частот имеют следующий вид:
, то выражения для расчета доплеровских сдвигов частот имеют следующий вид:
где  ,
,  и
и  ,
,  - радиальные скорости 1-го и 2-го CP относительно КРМ и AT в момент времени t1.
- радиальные скорости 1-го и 2-го CP относительно КРМ и AT в момент времени t1.
Рассчитывают значения радиальных скоростей 1-го и 2-го CP относительно КРМ  ,
,  в момент времени t1 по формулам:
в момент времени t1 по формулам:
Составляют тождества для расчета радиальных скоростей 1-го и 2-го CP относительно AT  ,
,  в момент времени t1:
в момент времени t1:
где хА, уА и zА - искомые координаты AT.
Разностное уравнение (В.6) с учетом равенств (В.7) приобретает вид:

Выражение (В.9), с учетом тождеств (В.8) преобразуют к уравнению, содержащему три неизвестных переменные хА, уА и zА н имеющему вид:
где коэффициент в правой части  - разность радиальных скоростей 2-го и 1-го CP относительно AT в момент времени t1, которая вычисляется в соответствии с выражением:
- разность радиальных скоростей 2-го и 1-го CP относительно AT в момент времени t1, которая вычисляется в соответствии с выражением:

В предположении, что AT расположен на земной поверхности, составляют еще одно уравнение с переменными хА, уА и zA:

Уравнения (В.4), (В.10) и (В.11) в совокупности образуют систему уравнений
Для решения системы уравнений второго порядка (В.12) применяют итерационный алгоритм, включающий следующие этапы:
Этап 1. Задают произвольные, но для быстрой сходимости наиболее правдоподобные опорные координаты AT:  ,
,  ,
,  .
.
Этап 2. Определяют значения функций  ,
,  и
и  системы уравнений (В.12) в точке с опорными координатами AT
системы уравнений (В.12) в точке с опорными координатами AT  ,
,  ,
,  :
:
Этап 3. Рассчитывают невязки w4, w5 и w6 по формулам
 ,
,  ,
,  .
.
Этап 4. Составляют систему трех линейных уравнений, в которой в качестве неизвестных выступают поправки к точке с опорными координатами AT ΔхА, ΔуА и ΔzA, на основе разложений функций  ,
,  и
и  в ряды Тейлора с точностью до первых производных:
в ряды Тейлора с точностью до первых производных:
где значения частных производных в точке с опорными координатами AT  ,
,  ,
,  равны:
равны:
 ,
,
 ,
,
 ,
,
где, в свою очередь, расстояния  ,
,  от 1 -го и 2-го CP до опорной точки с координатами
от 1 -го и 2-го CP до опорной точки с координатами  ,
,  ,
,  и радиальные скорости
и радиальные скорости  ,
,  1-го и 2-го CP относительно опорной точки с координатами
1-го и 2-го CP относительно опорной точки с координатами  ,
,  ,
,  равны:
равны:
Этап 5. Решают систему трех линейных уравнений (В.15), с тремя неизвестными одним из известных методов, например, методом Крамера.
Результатом решения системы уравнений (В.15) выступают поправки к опорным координатам AT ΔхА, ΔуА, ΔzA.
Этап 6. Определяют новые опорные координаты AT  ,
,  ,
,  :
:
 ,
,  ,
,  .
.
Этапы 1…6 в совокупности образуют первую итерацию. Далее итерации повторяют, используя каждый раз новые опорные координаты AT, полученные на этапе 6 предыдущей итерации. Количество необходимых итераций зависит от корректности выбора начальных опорных координаты (этап 1) и требуемой точности определения координат AT.
Окончательно, в качестве координат AT xA, yA, zA принимают значения опорных координат AT на последней итерации.











































Способ и устройство (варианты) создания преднамеренных помех
Способ радиоподавления каналов связи
Способ определения координат источника радиоизлучения с использованием летательного аппарата
Способ оценки эффективности радиоподавления сигнала спутниковой связи
Способ определения параметров орбиты искусственного спутника земли
Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу
Способ радиоподавления спутниковых каналов управления
Способ определения местоположения абонентского терминала с помощью спутника-ретранслятора на низкой околоземной орбите
Способ мониторинга космической радиолинии
Способ создания ретранслированных помех
Способ радиосвязи с землей постоянно действующей обитаемой базы на обратной (невидимой) стороне луны и система для осуществления данного способа
Способ обеспечения постоянной радиосвязи обитаемой базы на поверхности марса с землей и система для осуществления данного способа
Способ измерения времени жизни неосновных носителей заряда в кремнии
Способ контроля времени жизни неосновных носителей заряда в слитках кремния
Способ радиотехнических доплеровских угломерных измерений космического аппарата и система для осуществления данного способа
Способ одновременного определения шести параметров движения ка при проведении траекторных измерений одной станцией слежения и система для его реализации
Система радиоподавления несанкционированного дуплексного канала космической связи
Способ и устройство (варианты) создания преднамеренных помех
Способ определения погрешностей при траекторных измерениях межпланетных космических аппаратов за счет распространения радиосигналов в ионосфере земли и межпланетной плазме
Способ мониторинга космической радиолинии "земля - ка" и система для его реализации

