Результат интеллектуальной деятельности: ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД
Вид РИД
Изобретение
Изобретение относится к области измерительной техники, в основном к испытательному оборудованию, и предназначено для аттестации и верификации преобразователей инерциальной информации (ДУС, акселерометров, гироскопических устройств различного назначения), систем навигации (платформенных, бесплатформенных и др.), стабилизации и ориентации, в методах контроля которых предусмотрены последовательные или одновременные развороты за заданное время по двум осям на углы не превышающие ±360°.
Известен динамический стенд (Пат. №2526229 Российская Федерация, МПК G01C 25/00, G01P 21/00. Динамический стенд / А.П. Шкадаревич, Н.К. Горбаченя, Е.П. Васенко, М.М. Татур. - №2008152969/22; заявл. 31.12.08; опубл. 10.09.09, Бюл. №25. - 7 с.), который имеет две оси углового перемещения и обеспечивает автоматические развороты проверяемого прибора, вокруг его центра масс. Недостатком стенда является то, что в нем отсутствуют элементы для однозначной ориентации проверяемого прибора и для балансировки внутренней рамы требуется перемещать цилиндрические сектора, на которых установлен проверяемый прибор, при этом нарушается выставка его ориентации. Также отсутствует возможность двойного управления как от ПК, так и автономного - от блока управления и контроля.
Известен двухосный динамический стенд (Пат. 111634 Российская Федерация, МПК G01С 25/00. Двухосный динамический стенд / Е.Ф. Белов. - №2011131206/28; заявл. 26.07.11; опубл. 20.12.11, Бюл. №35. - 6 с.), который предназначен для испытаний и калибровок измерительных устройств, датчиков угловой скорости, акселерометров, гироскопических устройств различного назначения и выбран в качестве прототипа. Недостатком стенда является то, что у него отсутствует возможность привязки приборной системы координат (СК) к СК географической и СК стенда, наличие двойного контура управления, предназначенного для строгого поддержания заданной угловой скорости, а также наличие скользящих токоподводов ограничивает мощность двигателей, используемых в приводе, и накладывает ограничения на допустимые токи, передаваемые на ось.
Задачей изобретения является создание недорогого двухосного стенда с более простой и надежной конструкцией. Двухосный стенд предназначен для обеспечения требуемой последовательности поворотов проверяемых приборов при проведении испытаний, с установкой платформы в заданные угловые положения по углу крена и тангажа в пределах ±360°.
Технический результат достигается тем, что в двухосном поворотном стенде, содержащем основание, установочную платформу, закрепленную на двухосном подвесе, приводы и фотоэлектрические датчики угла (ДУ), расположенные по осям внутренней и внешней рамы подвеса, блок питания, управления и контроля (БПУ), согласно изобретению, в качестве приводов использованы шаговые двигатели (ШД) с червячными редукторами; введены две демпфирующие муфты для сопряжения двигателя с червяком, привод каждой оси снабжен контроллером, состоящим из модуля цифрового процессора (МЦП) и модуля коммутации (МК); первый и второй выходы ДУ соединены соответственно с первым и вторым входами порта ДУ МЦП; первый и второй выход порта ШД МЦП соединены соответственно с первым и вторым входами МК, выходы МК соединены с соответствующими входами обмоток ШД; БПУ состоит из контроллера приема-передачи информации (ПНИ), процессорного модуля (ПМ), блока питания, платы аварийного отключения приводов; при этом ПМ через контроллер ПНИ связан с интерфейсными модулями МЦП соответствующих контроллеров приводов и с ПЭВМ, порт управления ПМ связан с управляющим входом платы аварийного отключения приводов; плата аварийного отключения приводов выполнена с возможностью подачи напряжения питания с блока питания на МК контролеров привода; введены: концевые выключатели и стопорные механизмы внутренней и внешней рам подвеса, предотвращающие их разворот более±360°, причем концевые выключатели подключены к плате аварийного отключения приводов; эквивалент проверяемого прибора, обеспечивающий контроль точности разворота поворотного стенда в заданное угловое положение; на основании, рамах и платформе выполнены плоскопараллельные площадки, обеспечивающие контроль ориентации проверяемого прибора и привязку к географической системе координат.
Для питания и управления приводом вместо скользящих контактов использованы многожильные кабели.
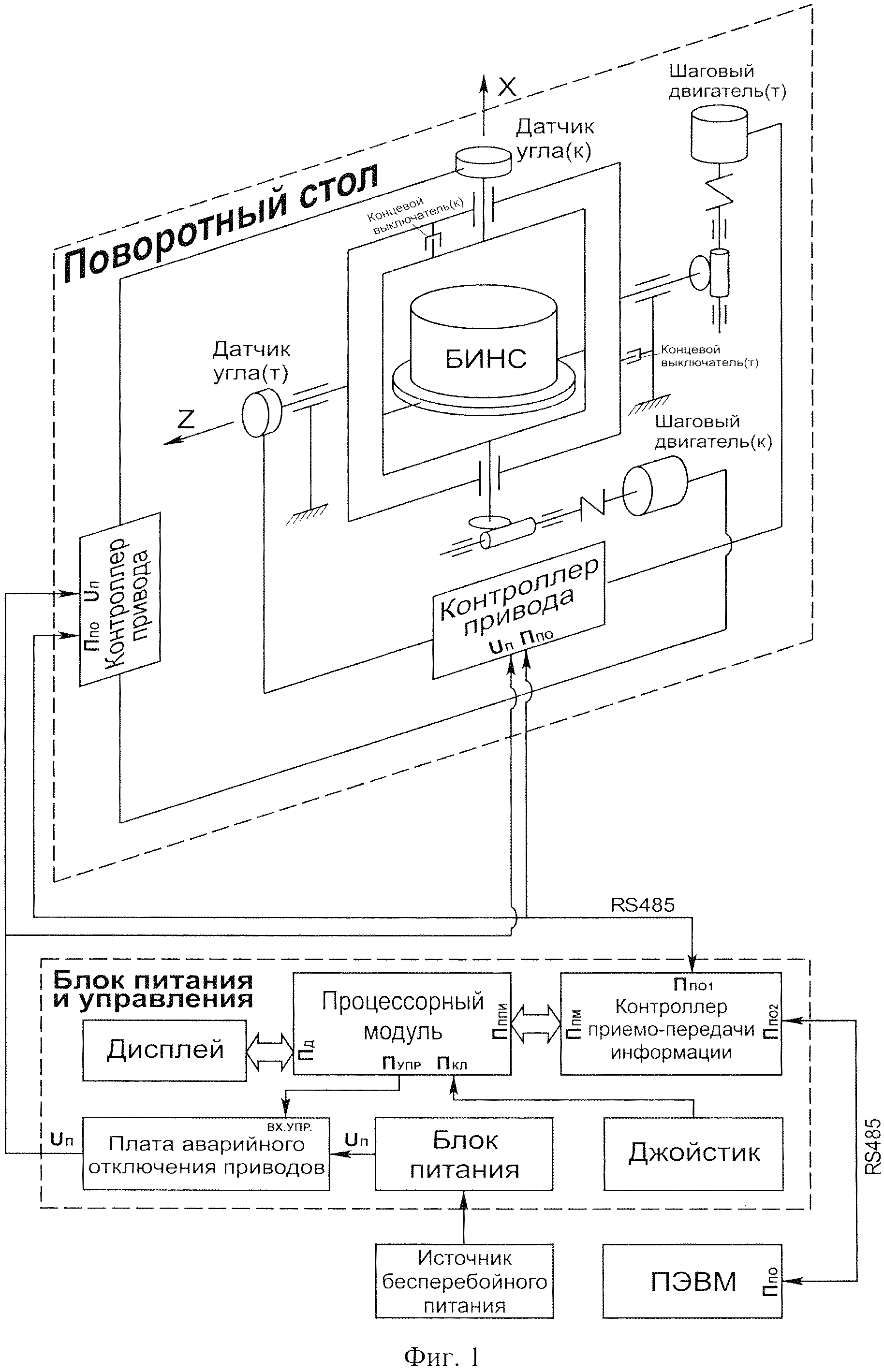
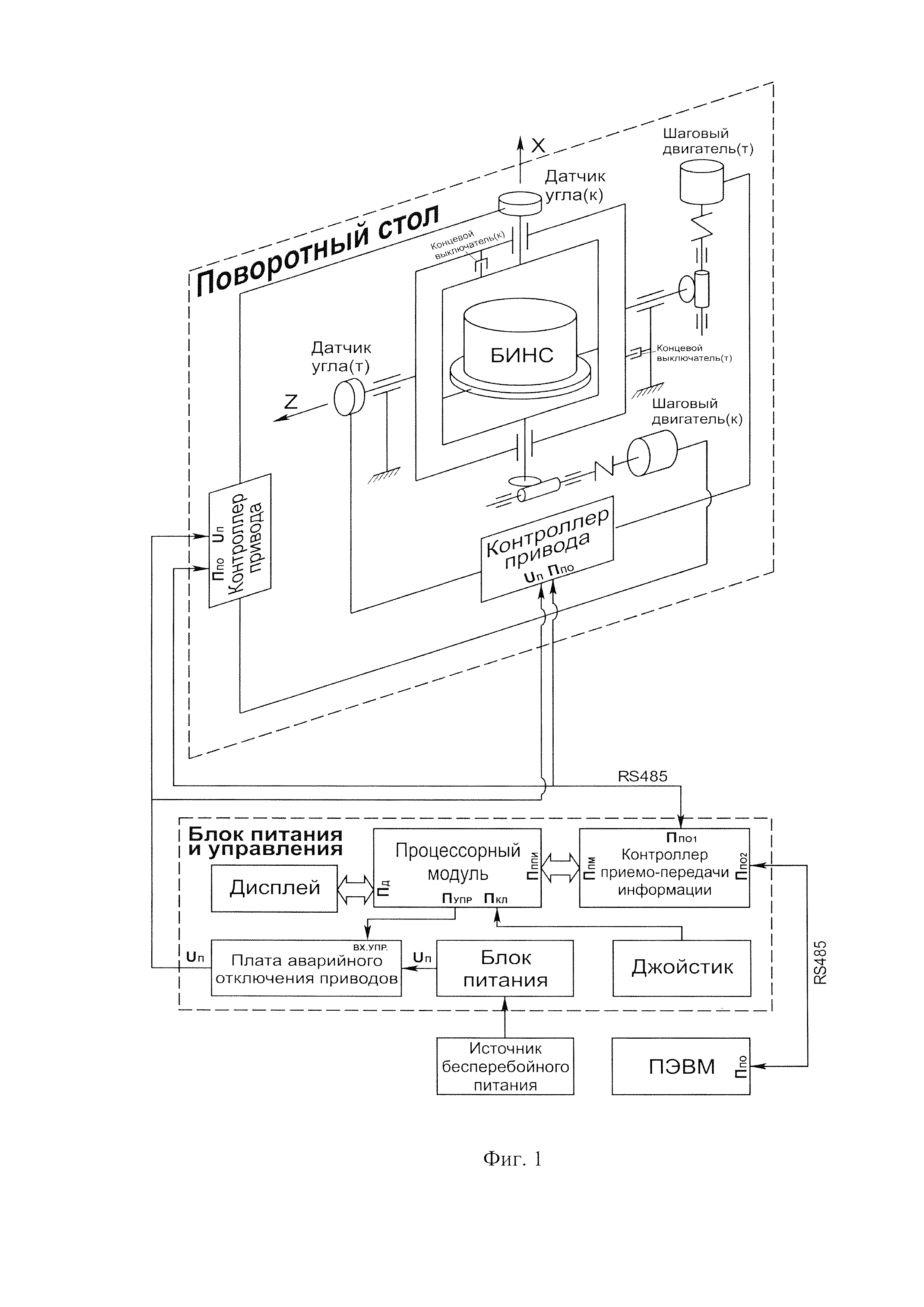
На фиг. 1 изображена функциональная схема двухосного поворотного стенда.
При испытаниях стенд должен обеспечивать установку проверяемого прибора в заданные угловые положения за определенное время. В состав стенда наряду с электромеханической частью в виде поворотного стола входит блок питания, управления и контроля, который включает в себя: блоки питания, процессорный модуль и контроллер приема-передачи информации по последовательному интерфейсу, плату аварийного отключения приводов, дисплей.
БПУ осуществляет:
- управление режимом работы стенда;
- прием и обработку информации от приводов внутренней и внешней рам по последовательному интерфейсу обмена данными, например RS485, CAN и т.д.;
- прием и обработку информации от концевых выключателей (механизмов ограничения разворота);
- отображение на дисплее, режимов работы и состояния;
- соединение с внешней ПЭВМ через стандартный интерфейс, например RS485, CAN и т.д.;
- формирование напряжений, необходимых для питания плат, входящих в состав БПУ и приводов внутренней и внешней рам;
- отключение питания приводов в случае аварийных ситуаций (срабатывание концевых выключателей или ручной останов оператором).
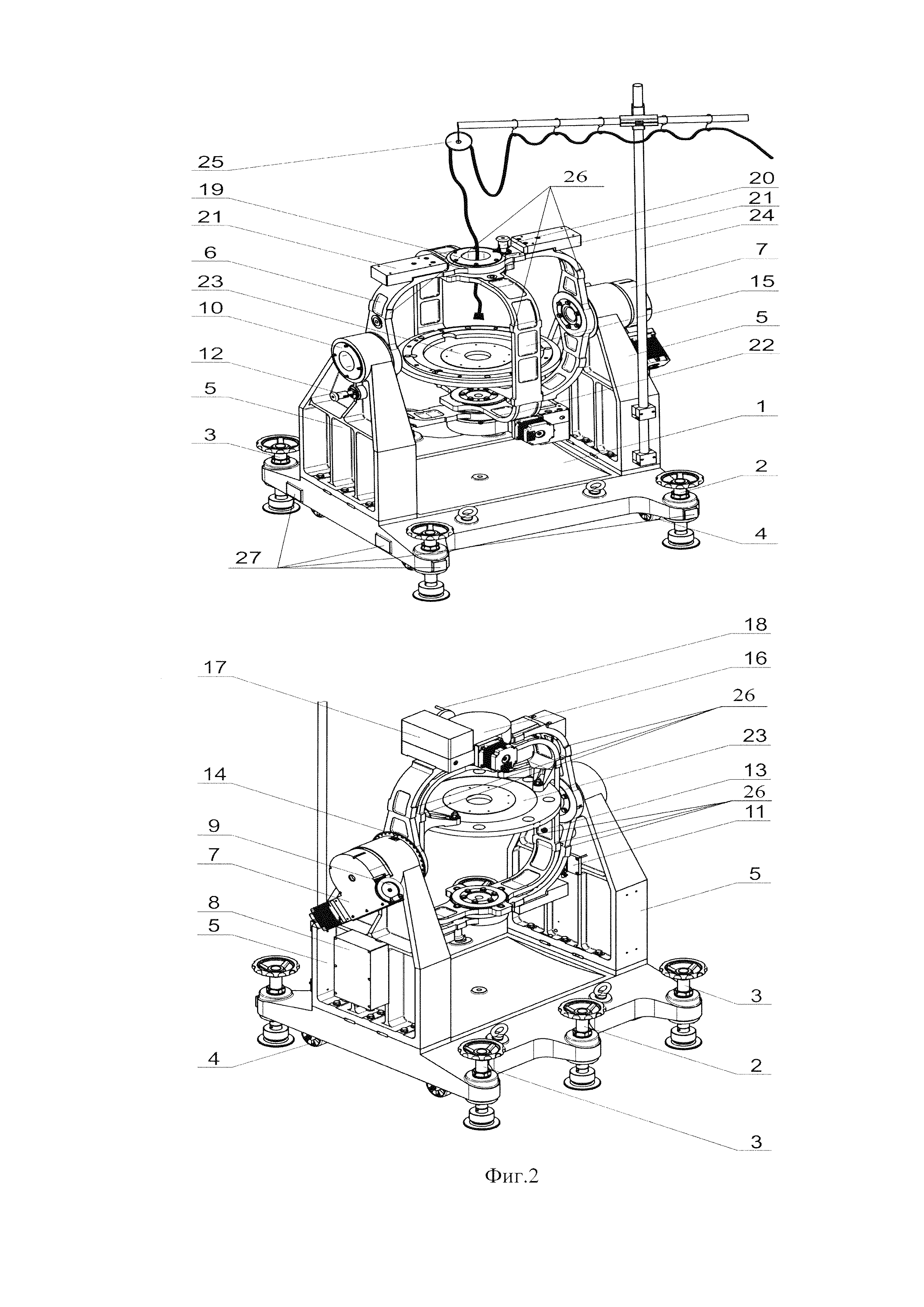
На фиг. 2 представлена электромеханическая часть стенда - ПС, содержащий основание 1, на котором имеются пять винтовых опор с маховиками, три выставочные винтовые опоры 2, обеспечивающими выставку стенда в горизонтальную плоскость и две вспомогательные винтовые опоры 3 для фиксации выставленного положения. Для перемещения внутри помещения на нижней стороне основания размещены четыре колеса 4. На основании закреплены две стойки 5 с подшипниковыми опорами внешней рамы 6. На одной стойке (на внешней оси) установлены привод 7 с контроллером привода 8, соединители для подключения к блоку питания и управления и маховик ручного привода внешней рамы 9. На другой стойке (на внешней оси) размещен дискретный датчик угла - энкодер 10. На стойке установлен также фиксатор (арретир) 12 внешней рамы. Внешняя рама 6 закреплена в подшипниках запрессованных в стойках, она обеспечивает повороты проверяемого прибора по тангажу (вокруг оси OZ прибора) на ±360°. На внешней раме установлен лимб внешней рамы 14. Вращение внутренней рамы 15 обеспечивается подшипниками, запрессованными во внешней раме. На стенде установлены стопорные механизмы (11 и 13) и концевые выключатели внешней и внутренней рам подвеса, предназначенные для предотвращения разворота рам на угол более ±360°. На оси внутренней рамы установлены с одной стороны -соответствующий привод 16 с контроллером 17, маховик ручного привода 18 внутренней рамы, с другой стороны - энкодер 19 и фиксатор 20 внутренней рамы. Также на внешней стороне рамы (со стороны энкодера) расположены две площадки для крепления набора грузов - противовесов 21, предназначенных для статической балансировки внутренней рамы с установленным прибором. Внутренняя рама обеспечивает повороты проверяемого прибора по крену (вокруг оси ОХ прибора) на ±360°. На ней установлен лимб внутренней рамы 22. К внутренней раме 15 жестко присоединена платформа 23, предназначенная для установки и закрепления проверяемых приборов. Учитывая, что развороты, осуществляемые двухосным поворотным столом, при проверке приборов не превышают ±360°, использовано схемное решение, позволившее обойтись малым числом линий связи между БПУ и приводами, что дало возможность пропустить их через полые оси рам. За счет этого в конструкции не использованы традиционно применяющиеся в многоосных поворотных столах токоподводы. Использование токоподводов накладывает ряд ограничений: высокая стоимость качественных токоподводов, дополнительный момент трения, ограничения на минимальные и максимальные пропускаемые токи, ограничения на пропускаемые частоты, вероятность потери контакта при вибрации. Для исключения закручивания кабелей проверяемого прибора при испытаниях в электромеханическую часть ПС введены кронштейн 24 и полый вал (ось рамы). В кронштейн введен пружинный механизм 25, исключающий провисание кабелей прибора в процессе разворотов. В качестве углового энкодера был выбран датчик угла, конструкция которого имеет отверстие большого диаметра, например, угловые энкодеры серии RESR, REXM фирмы Renishaw, серия Е фирмы Autonics и серия ЛИР фирмы СКБ ИС.
На платформе выполнены посадочные поверхности и базирующие элементы, обеспечивающие однозначную ориентацию прибора относительно осей вращения стенда, а также имеются плоскопараллельные площадки для установки уровня (квадранта) на этапе проверки погрешности разворота платформы относительно географической системы координат. На рамах выполнены двадцать четыре плоскопараллельных площадки 26 для установки уровня на этапе проверки выставки поворотного устройства относительно географической системы координат восемь штук на внутренней раме и шестнадцать на внешней. Площадки позволяют поставить уровень на выбранную пару и проверить параллельность плоскости, проходящей через них, соответствующей оси вращения. При этом на рамах площадки можно установить уровень в положении 0° и при повороте рамы на 180°. На основании выполнены четыре плоскопараллельные площадки 27 для выставки ПС в азимут, они строго привязаны к осям вращения стенда. Две площадки выполнены параллельно оси Z, две другие площадки - перпендикулярны оси Z. Выставка в азимут осуществляется путем прижатия той или другой пары площадок к упорному элементу, сориентированному по сторонам света с помощью спецсредств.
В конструкцию ПС включены механические (электромеханические) арретиры, обеспечивающие установку внешней и внутренней рам в исходное положение и предотвращающие развороты во время закрепления прибора на платформе. Для контроля привязки приборной СК к осям вращения стенда, а также проверке ориентации относительно географической СК, в состав ПС введено дополнительное устройство - эквивалент прибора, в котором базовые посадочные поверхности аналогичны посадочным поверхностям проверяемого прибора (устанавливается на время периодических, автономных проверок двухосного поворотного стола).
Для точного удержания углового положения между разворотами предусмотрен ряд мер: в приводе использован самотормозящийся червячный редуктор (механическое торможение) и, при необходимости, обмотки шагового двигателя могут быть закорочены силовым коммутатором (электрическое торможение). Такое техническое решение позволило отказаться от дорогостоящих, требующих дополнительного питания и создающих магнитные поля электромагнитных муфт. В аналогичных поворотных столах с прямым приводом удержание углового положения осуществляется подачей на двигатель управляющего напряжения, исключающего поворот ротора. Однако, система управления прямым приводом, пытаясь удержать заданное угловое положение, осуществляет паразитные микроколебания ротора, которые могут фиксироваться проверяемым прибором (определяется полосой пропускания). Кроме того, это приводит к дополнительным затратам энергии и нагреву обмоток двигателя. При кратковременном "провале" питания данное угловое положение может теряться. Комбинация механического и электрического торможения, примененная в ПС, эффективна при режимах с длительной фиксацией заданного углового положения.
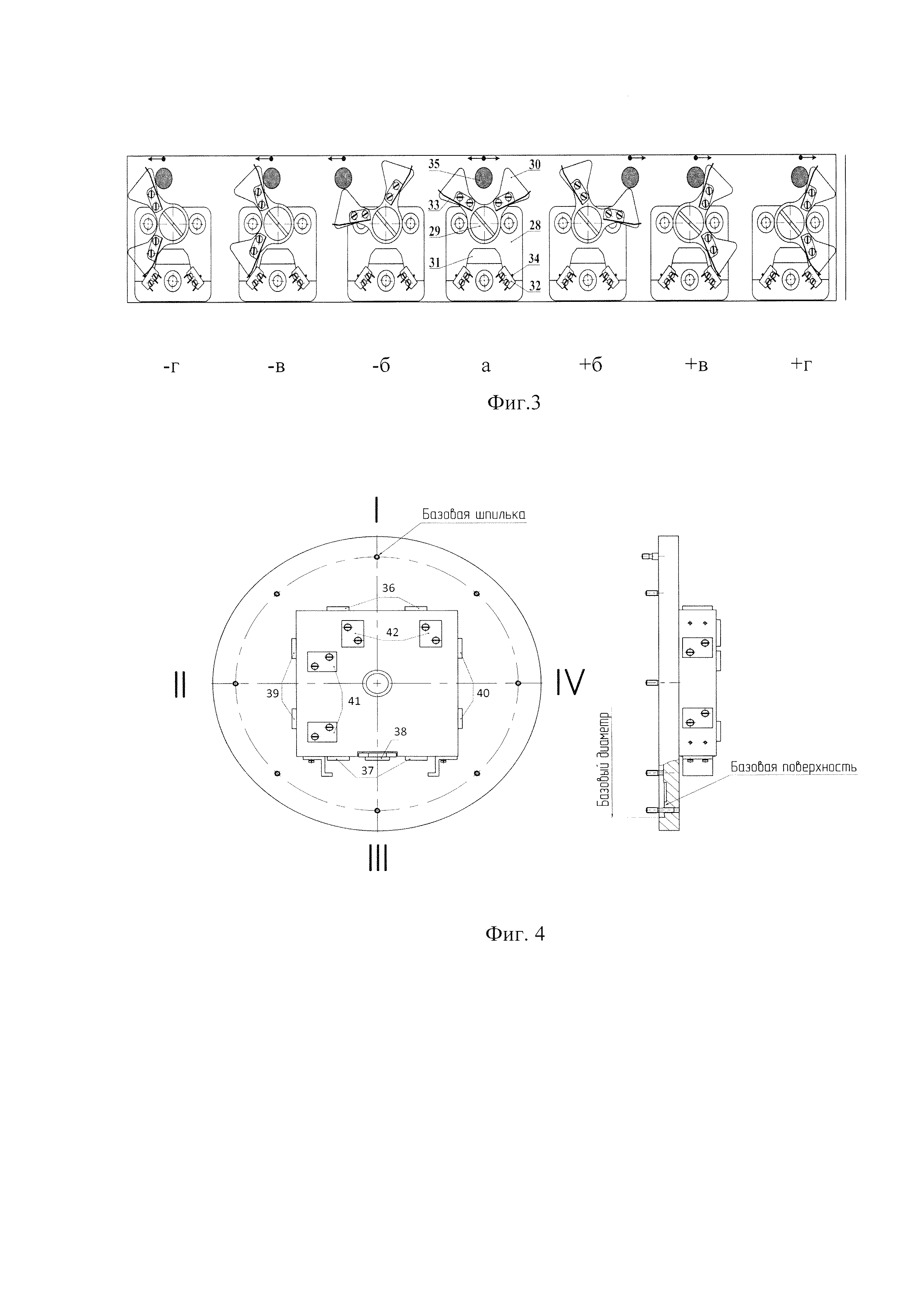
Применение в стенде ограничителей с микропереключателями позволили предотвратить развороты внешней и внутренней рам на угол более ±360°. Ограничение разворотов осуществляется электронным и механическим способами. Схема работы ограничителя показана на фиг. 3. На неподвижной части стенда, например стойке внешней рамы, крепится основание 28 ограничителя. На основании имеются ось 29, вокруг которой вращается V-образный кулачок 30 и упор 31 для кулачка в виде выступа, и установлены два микропереключателя 32. На кулачке закреплены пружинные толкатели 33, нажимающие кнопку микропереключателя 34. На подвижной части стенда, например раме, напротив V-образного кулачка устанавливается палец-упор 35 в виде цилиндрического стержня, который обеспечивает толкание кулачка при вращении рамы в прямом и обратном направлении. Предотвращение самопроизвольного перемещения кулачка обеспечивается волнистой пружиной, установленной на его оси. В исходном положении (вид а) палец-упор находится между плечами V-образного кулачка. При начале вращения рамы в прямом направлении палец-упор толкает плечо кулачка, отклоняя его в сторону, согласно виду б. После совершения рамой оборота 360° палец-упор толкает другое плечо кулачка до тех пор, пока пружинный толкатель не нажмет кнопку микропереключателя (вид в). После срабатывания контактов микропереключателя подается сигнал на остановку двигателя, обеспечивающего вращение рамы. В случае не срабатывания электронной защиты дальнейшее движение кулачка и рамы блокируется упором на основании ограничителя (вид г). При вращении рамы в обратном направлении происходят аналогичные действия.
Учитывая, что могут испытываться приборы с различными вариантами исполнения базирующих элементов, эквивалент прибора изготавливается с соответствующими элементами базирования. Пример одного из вариантов исполнения эквивалента прибора приведен на фиг. 4. В любом исполнении в его конструкции должна присутствовать призма со строго ориентированными друг относительно друга поверхностями (площадками). Площадки 36 параллельны площадкам 37, плоскости зеркала 38, и перпендикулярны площадкам 39, 40, 41, 42 и опорной базовой поверхности прибора. Площадки 39 параллельны площадкам 40 и перпендикулярны площадкам 36, 37, 42, 41, плоскости зеркала 38. Площадки 36, 37, 38, 39, 40, 42, предназначены для установки уровня (квадранта) при проверке ориентации СК стенда и прибора. Зеркало 38 предназначено для контроля ориентации системы координат стенда и прибора с помощью оптических средств (теодолиты, коллиматорные устройства, гирокомпасы и т.п.). Базовая шпилька и посадочный диаметр эквивалента обеспечивают однозначную ориентацию площадок 39 и 40 параллельно оси Y, а площадок 36 и 37 - оси Z. Базовая поверхность обеспечивает однозначную ориентацию площадок 41 и 42 перпендикулярно оси X. Кроме того установкой оптического квадранта на площадки обеспечивается проверка правильности отображения угла, измеренного датчиком угла соответствующей оси при установках в промежуточные положения, отличные от горизонтальных.
Для сопряжения шагового двигателя (ШД) с червячным редуктором и для устранения вибрации при передаче вращения от работы ШД введены две демпфирующие муфты. Муфта выполнена в виде двух цанговых зажимов, устанавливающихся на сопрягаемых валах, и расположенного между ними демпфирующего вкладыша, выполненного из резины, профиль и жесткость которой выбрана из условия обеспечения требуемого коэффициента демпфирования. Совокупность алгоритмов плавного управления работой ШД и использование демпфирующей муфты, позволили существенно снизить вибрации от резонансов при вращении. Использование одинаковых приводов по двум осям позволяет иметь универсальную структуру электронных блоков, одни и те же алгоритмы управления и программное обеспечение, что обеспечивает взаимозаменяемость блоков, снижает номенклатуру используемых элементов, упрощает настройку и ремонт. При существенной разнице моментов инерции внутренней и внешней рам изменяются коэффициенты в памяти контроллера, при этом новая версия программного обеспечения не требуется.
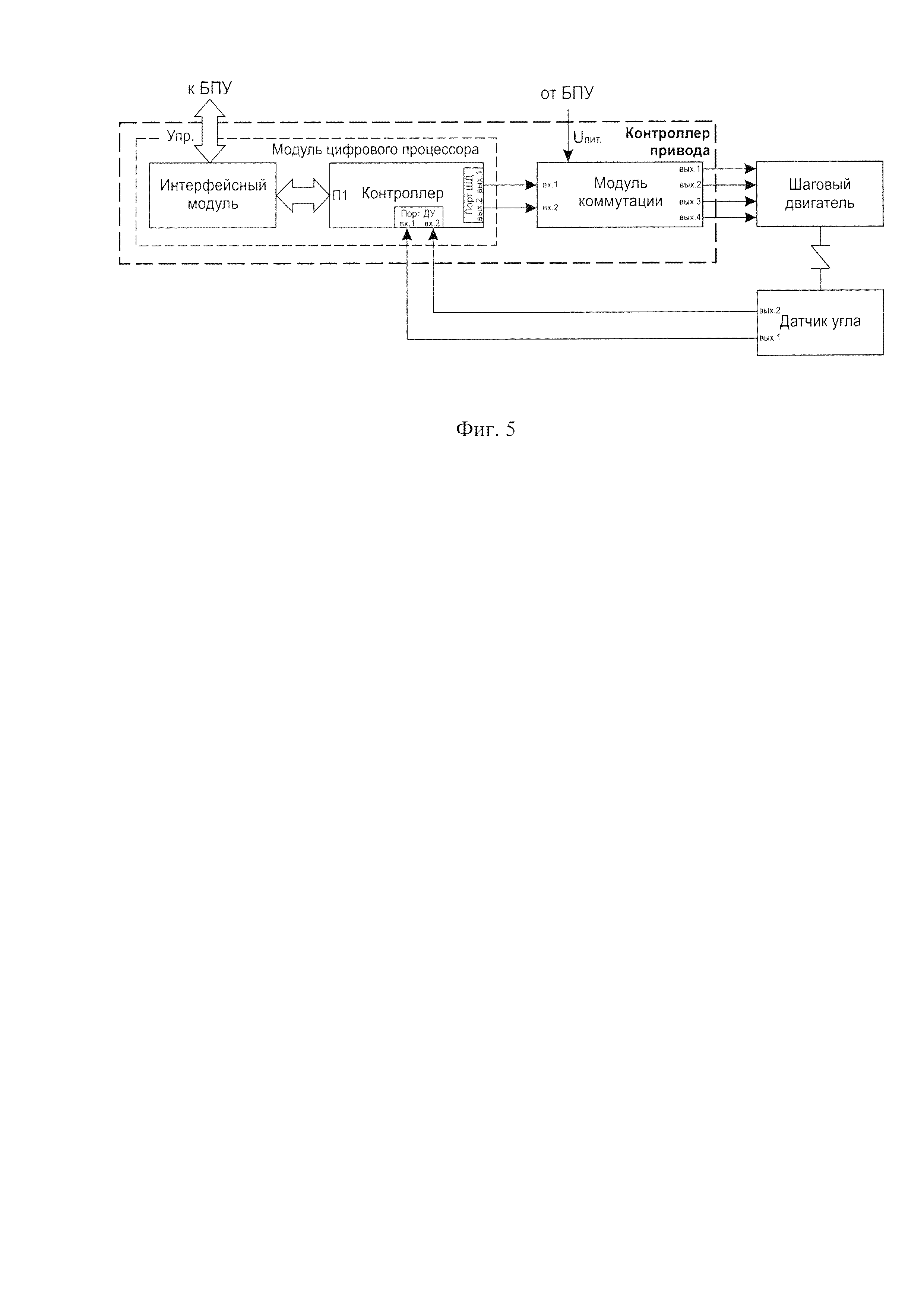
Структурная схема привода показана на фиг. 5.
Приводы механизма разворота по крену и тангажу выполнены в виде двух одинаковых узлов, включающих в себя:
- червячный редуктор, приводимый в движение ШД;
- дискретный датчик угла (угловой энкодер);
- контроллер;
- плата силовых электронных ключей (модуль коммутации);
- модуль последовательного интерфейса (интерфейсный модуль). Учитывая, что точности разворотов в основном обеспечиваются
приводами, имеющими сложные функциональные связи, для пояснения их работы структурная схема приводов представлена более подробно.
Двухосный поворотный стенд работает следующим образом. Питание и управление приводом осуществляется по минимальному количеству проводников: 2 линии - питание, 3 линии - управление. Питание БПУ осуществляется от мощного источника бесперебойного питания, позволяющего продолжить цикл испытаний при отключении сетевого напряжения и предотвратить попадание помех на стенд из промышленной сети. Питание каждого привода осуществляется от одного мощного стабилизированного блока питания. БПУ осуществляет управление приводами и обмен информацией с ними по стандартному последовательному интерфейсу, например, RS485, CAN и т.п., что позволяет обойтись малым числом линий связи. В БПУ процессорный модуль (ПМ) через порт (ППпи) связан с портом (Ппм) контроллера ПЛИ, а через порт управления (ПУПр) ПМ подаются управляющие команды на вход управления (Вх.упр). платы аварийного отключения приводов. ДУ инкрементного типа, выдает импульсы пропорционально углу поворота рамы, а также выдает импульс при прохождении специальной риски (нулевая метка), являющейся началом отсчета. Сигнал с первого выхода (Вых. 1) ДУ (нулевая метка) поступает на первый вход (вх. 1) порта ДУ модуля цифрового процессора (МЦП). Сигнал со второго выхода (Вых. 2) ДУ (импульсы) поступает на второй вход (вх. 2) порта ДУ МЦП. Контроллер ППИ через второй порт последовательного обмена (ППО2) связан с ПЭВМ. Управляющие сигналы (Упр.) о необходимом угле поворота и времени разворота с контроллера ППИ через первый порт последовательного обмена (ППО1) по сформированному адресу поступают на интерфейсные модули (крена или тангажа) и передаются в МЦП через последовательный порт (П1). МЦП анализирует управляющие сигналы, сравнивает их с сигналом, полученным с ДУ, и производит следующие вычисления: текущее угловое положение, требуемый угол разворота, направление, функцию изменения скорости разворота в каждой точке вращения для обеспечения заданного временного интервала. По результатам вычислений МЦП выдает через первый выход (вых.1) порта ШД последовательность импульсов на первый вход (вх. 1) модуля коммутации, определяющих направление и скорость вращения. К выходам МК (1, 2, … n) подключены обмотки ШД, где n - количество обмоток двигателя. Через выход платы аварийного отключения подается напряжение (Uп) выходного каскада силовых электронных ключей на МК соответствующих контролеров привода. МЦП через второй выход (вых. 2) порта ШД на второй вход (вх. 2) МК выдает сигнал ШИМ, пропорциональный требуемому напряжению питания ШД для данной скорости. В результате силовыми электронными ключами напряжение питания снижается до требуемого значения. По алгоритму, сформированному в МЦП, происходит плавный разгон ШД за счет увеличения частоты управляющих импульсов и плавное торможение - за счет снижения частоты, при подходе к заданному угловому положению. Для управления разворотом в МЦП запрограммирован регулятор.
Программное обеспечение позволяет реализовывать любую циклограмму работы стенда в режимах позиционирования или угловых скоростей раздельно по каждой из осей или одновременно по двум осям. Программное обеспечение записывается в энергонезависимую память соответствующего контроллера.
Таким образом, заявлен двухосный поворотный стенд, содержащий основание, установочную платформу, закрепленную на двухосном подвесе, приводы и фотоэлектрические датчики угла (ДУ), расположенные по осям внутренней и внешней рамы подвеса, блок питания, управления и контроля (БПУ). Отличительная особенность стенда заключается в том, что в качестве приводов использованы шаговые двигатели (ШД) с червячными редукторами; введены две демпфирующие муфты для сопряжения двигателя с червяком, привод каждой оси снабжен контроллером, состоящим из модуля цифрового процессора (МЦП) и модуля коммутации (МК); первый и второй выходы ДУ соединены соответственно с первым и вторым входами порта ДУ МЦП; первый и второй выход порта ШД МЦП соединены соответственно с первым и вторым входами МК, выходы МК соединены с соответствующими входами обмоток ШД; БПУ состоит из контроллера приема-передачи информации (ППИ), процессорного модуля (ПМ), блока питания, платы аварийного отключения приводов; при этом ПМ через контроллер ППИ связан с интерфейсными модулями МЦП соответствующих контроллеров приводов и с ПЭВМ, порт управления ПМ связан с управляющим входом платы аварийного отключения приводов; плата аварийного отключения приводов выполнена с возможностью подачи напряжения питания с блока питания на МК контролеров привода; введены: концевые выключатели и стопорные механизмы внутренней и внешней рам подвеса, предотвращающие их разворот более ±360°, причем концевые выключатели подключены к плате аварийного отключения приводов; эквивалент проверяемого прибора, обеспечивающий контроль точности разворота поворотного стенда в заданное угловое положение; на основании, рамах и платформе выполнены плоскопараллельные площадки, обеспечивающие контроль ориентации проверяемого прибора и привязку к географической системе координат.
Кроме того, введен кронштейн с разгрузочным устройством для закрепления штатных кабелей испытуемых приборов.
Способ обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа
Способ проверки отсутствия перерывов контактирования между щетками и кольцами в коллекторном токоподводе и устройство для его реализации
Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа
Многоканальный кварцевый генератор
Стабилизатор постоянного напряжения
Печатная плата с внутренним монтажом элементов и способ ее изготовления
Шаговый электропривод
Опора карданова подвеса гиростабилизатора
Устройство выравнивания входной информации
Способ изготовления склеивающей прокладки
Конструкция многослойных печатных плат со встроенным теплоотводом
Способ оперативной проверки гиромотора и устройство для его реализации
Устройство синхронизации двух эвм
Устройство синхронизации работы граней в мажоритированных системах
Проволока-присадка, способ ее изготовления и применения
Способ изготовления склеивающей прокладки
Бесплатформенный инерциальный блок
Способ и устройство асинхронного последовательного интерфейса обмена информацией и его модификации
Устройство формирования приоритетов при обращении к общей памяти нескольких устройств
Устройство базирования многогранных призм

