Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ДВИГАТЕЛЯ КОРРЕКЦИИ
Вид РИД
Изобретение
Устройство относится к космической технике, к системам поворота блока коррекции в составе космического аппарата (КА) и может быть использовано в аппаратах различных видов.
Выбор способа установки блоков коррекции на КА один из важных этапов проектирования, от точности выставки вектора тяги в центр масс зависит дальнейшая работа КА на орбите. Изменение центра масс КА в процессе выработки топлива приводит к увеличению возмущающих моментов, а, следовательно, к повышению расходов на их компенсацию.
Известно опорно-поворотное устройство позиционирования антенны (KR 101429001 В1), содержащее приводы управления двумя углами места и азимута, при помощи которых осуществляется наведение антенн. Недостатком изобретения относится то, что конструкция устройства не может быть использована в условиях космического пространства из-за габаритных характеристик.
Известно опорно-поворотное устройство, содержащее привод азимутального вращения, представляющее собой вертикальную колонну, все элементы приводов которой размещены внутри этой колонны (RU 2359372). Недостатком известного устройства является малый диапазон применения, данная конструкция устройства не применима в условиях космического пространства, может применяться только для наземных систем.
Известно устройство, которое принято за прототип изобретения, содержащее возвратно-поступательный привод (US 6820531 B1), реализованный на основе линейного электродвигателя, функции которого в данном устройстве выполняют приводы вращения. За счет линейного привода смещается шаровая опора каретки, в плоскости платформы изменяя угол местности. Вращение платформы определяет угол азимута. Недостатком такой конструкции является подвод электропитания к вращающимся элементам.
Задача изобретения состоит в комбинировании функций коррекций орбиты КА и создании вращающих моментов относительно центра масс, за счет использования свойств разработанной конструкции.
Указанная задача решается за счет разработки конструкции устройства управления вектором тяги двигателя коррекции, выполненное по типу опорно-поворотного устройства, изменяющего углы азимута и местности и содержащее приводы вращения. Приводы, связанные между собой карданной связью, вращают поворотные элементы относительно верхней и нижней интерфейсной платы. Точка поворота карданной связи совпадает с плоскостью сопряжения поворотных элементов, в которой расположен один из трех опорных подшипников, два других расположены в плоскостях сопряжения поворотных элементов с верхней и нижней интерфейсной платой, что позволяет при вращении изменять углы азимута и местности, при их совместном, либо противоположном вращении соответственно.
Техническим результатом, достигаемым изобретением является:
- контролируемое изменение наклона в двух плоскостях двигателя коррекции относительно посадочной плоскости;
- уменьшение возмущающих моментов, которые возникают из-за отклонения вектора тяги от центра масс КА;
- повышение точности в управлении углом наклона блока коррекции. Предлагаемое устройство поясняется чертежами, на которых показано:
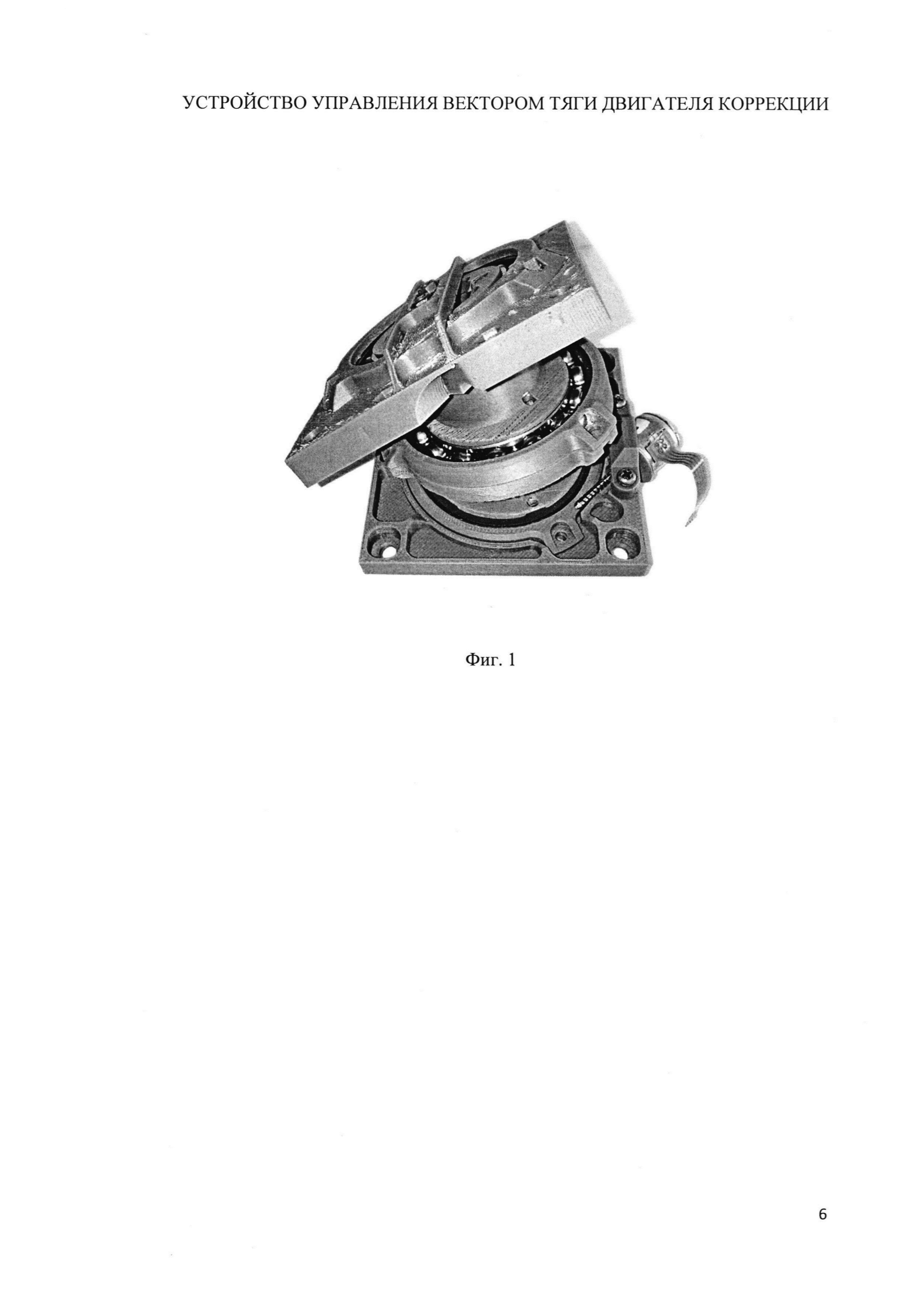
- на фиг. 1 - прототип поворотного устройства;
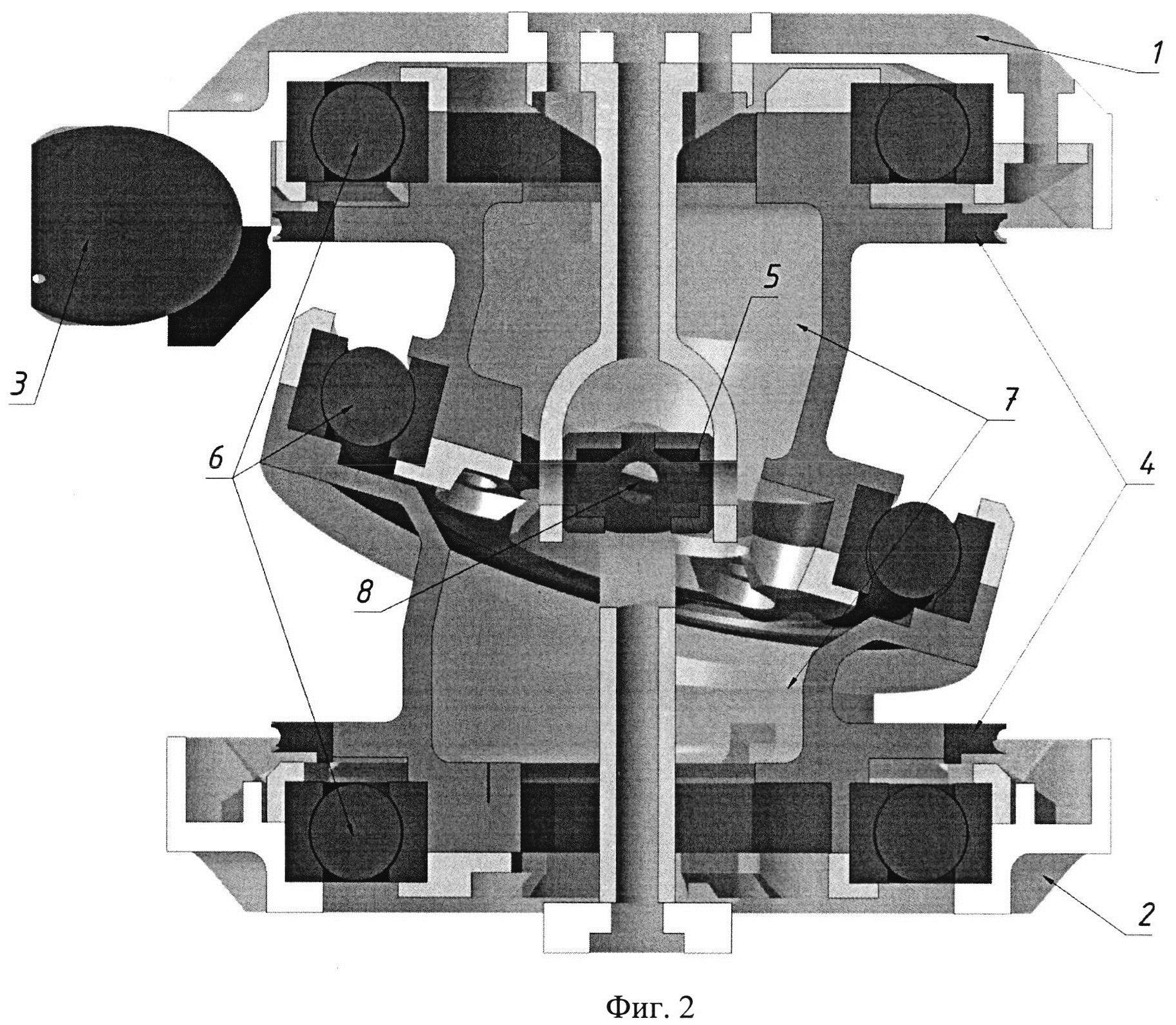
- на фиг. 2 - поворотное устройство в разрезе;
Устройство управления вектором тяги двигателя коррекции включает в себя верхнюю интерфейсную плату 1, расположенную в верхней части конструкции и служащей в качестве основания для двигателя коррекции. В нижней части конструкции устройства расположена нижняя интерфейсная плата 2 предназначенная для соединения с посадочным местом.
Приводы 3, в количестве двух штук, находятся во взаимно-перпендикулярных плоскостях, для исключения столкновений между ними во время работы устройства и каждый привод соединен с верхней 1 и нижней 2 интерфейсной платой соответственно. Шестерни 4 в количестве двух штук, установлены в верхней 1 и нижней 2 интерфейсной плате соответственно и находятся в жестком соединении с верхним 7 и нижним 7 поворотным элементом.
Карданный вал 5 расположен в центральной части устройства и соединяет верхнюю 1 и нижнюю 2 интерфейсную плату, предназначен для предотвращения вращения верхней интерфейсной платы 1 относительно нижней интерфейсной платы 2. Данная карданная связь препятствует вращению верхней интерфейсной платы 1 относительно нижней интерфейсной платы 2, что препятствует заклиниванию механизма. Поворотная система устройства состоит из трех подшипников 6, расположенных в верхней, нижней и центральной части устройства и объединяющие в поворотную систему верхний и нижний поворотный элемент 7 с верхней 1 и нижней 2 интерфейсной платой. Подшипники 6 осуществляют вращение независимо друг от друга. Точка поворота 8 расположена на пересечении осей карданного вала 5 и совпадает с плоскостью подшипника 6 расположенного в центральной части устройства.
Работа устройства происходит следующим образом.
При работе приводов 3 происходит вращение шестерней 4 либо в одну сторону, либо в разные стороны с равной угловой скоростью.
При вращении шестерней 4 в одну сторону происходит изменение направления плоскости наклона, изменяется угол азимута верхней интерфейсной платы 1 с неизменным углом наклона местности. При вращении шестерней 4 в разные стороны происходит контролируемый наклон верхней интерфейсной платы 1 относительно нижней интерфейсной платы 2, изменяется угол местности при неизменном направлении плоскости наклона.
Устройство управления вектором тяги двигателя коррекции, выполненное по типу опорно-поворотного устройства, изменяющего углы азимута и местности и содержащее приводы вращения, отличающиеся тем, что приводы, связанные между собой карданной связью, вращают поворотные элементы относительно верхней и нижней интерфейсной платы, точка поворота карданной связи совпадает с плоскостью сопряжения поворотных элементов, в которой расположен один из трех опорных подшипников, два других расположены в плоскостях сопряжения поворотных элементов с верхней и нижней интерфейсной платой, что позволяет при вращении изменять углы азимута и местности при их совместном либо противоположном вращении соответственно.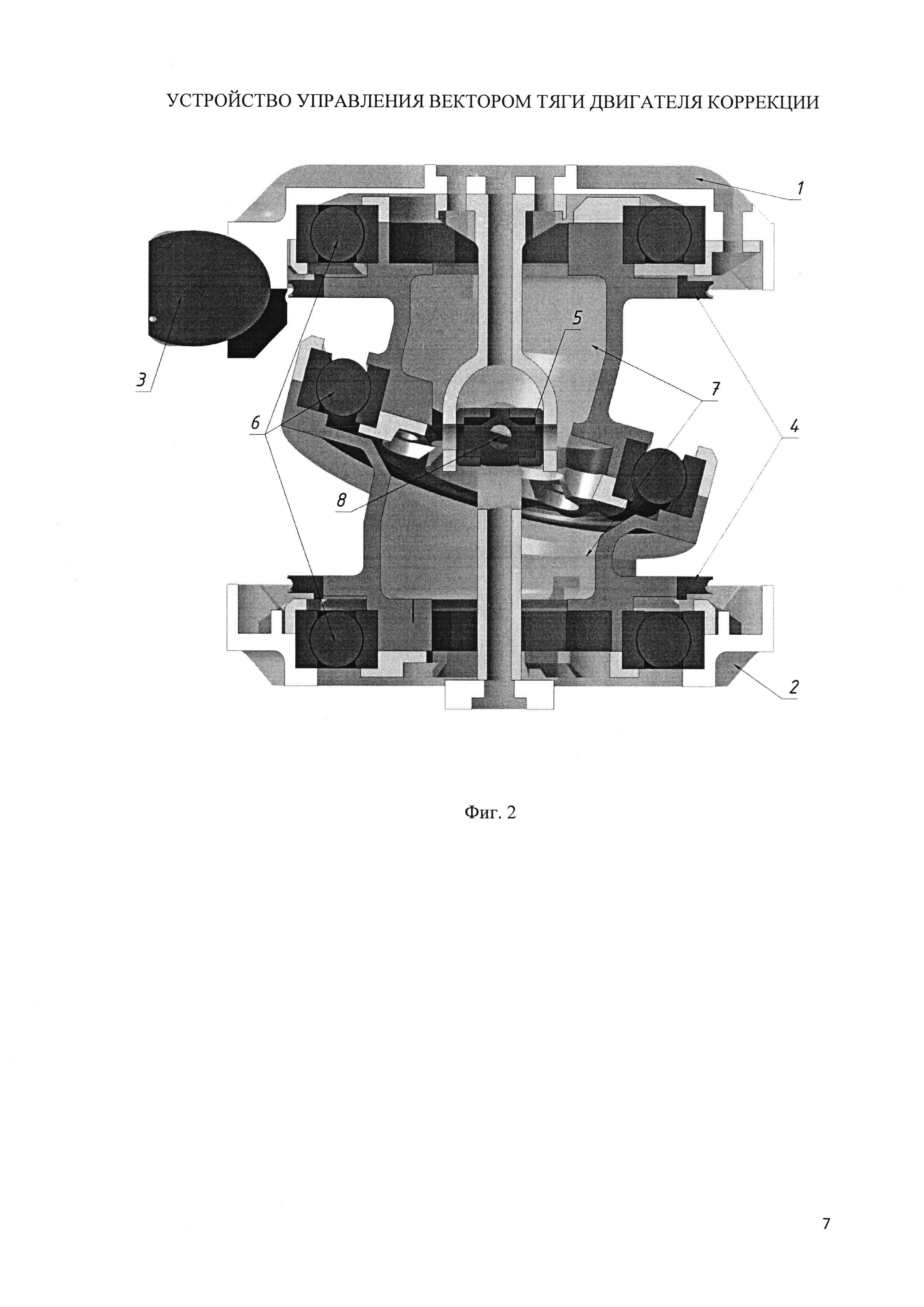
Способ защиты командно-измерительной системы космического аппарата
Способ эскплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата, эксплуатирующегося на низкой околоземной орбите
Способ коррекции орбитального движения космического аппарата
Способ резервирования космического аппарата на геостационарной орбите
Способ мониторинговой коллокации на геостационарной орбите
Держатель
Регулируемый узел крепления
Способ автономной коллокации на геостационарной орбите
Способ электрических проверок космического аппарата
Многоканальный командный аппарат с электронной коммутацией
Силовая конструкция платформы космического аппарата
Способ сборки силовой конструкции платформы космического аппарата

