Результат интеллектуальной деятельности: СПОСОБ ПЕРЕНОСА ОБЪЕКТА НА ГРАНИЧНУЮ ПОВЕРХНОСТЬ
Вид РИД
Изобретение
Область техники
Настоящее изобретение касается способа переноса объекта на граничную поверхность с помощью маркировочного устройства согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Из DE 202009017424 U1 известно оборудование для переноса объекта на граничную поверхность с помощью маркировочного устройства. В состав оборудования входят маркировочное устройство, локационное устройство и контрольное устройство. Пользователь перемещает детекторное устройство над граничной поверхностью. Во время перемещения маркировочного устройства локационное устройство регулярно определяет текущее положение маркировочного устройства. Пользователь может запрограммировать перечень заданных координат (точек визирования). Маркировочное устройство может давать зрительный, акустический или осязательный обратный сигнал, информируя о близости маркировочного устройства Известное оборудование непригодно для того, чтобы переносить на граничную поверхность раздела объекты, размеры которых больше, чем размеры печатного поля маркировочного устройства.
Представление изобретения
Задача настоящего изобретения состоит в разработке способа переноса объекта на граничную поверхность с помощью маркировочного устройства, которое пригодно для объектов, размеры которых больше, чем размеры печатного поля маркировочного устройства.
Эту задачу согласно изобретению решают с помощью вышеупомянутого способа переноса объектов на граничную поверхность посредством признаков независимого пункта 1 формулы изобретения. Предпочтительные усовершенствования представлены в зависимых пунктах формулы изобретения.
Согласно изобретению, способ переноса объекта на граничную поверхность с помощью оборудования, имеющего маркировочное устройство с печатным полем, локационное устройство и контрольное устройство, отличается тем, что:
- на первом этапе выбирают подлежащий маркированию первый объект с первым стартовым положением и первыми заданными координатами, причем размеры первого объекта больше, чем размеры печатного поля.
- на втором этапе с помощью локационного устройства определяют текущее положение маркировочного устройства и передают его на контрольное устройство,
- на третьем этапе контрольное устройство, исходя из текущего положения маркировочного устройства, определяет текущее печатное поле маркировочного устройства и
- на четвертом этапе контрольное устройство сравнивает первое стартовое положение первого объекта с текущим печатным полем маркировочного устройства.
Способ согласно изобретению посвящен тому, чтобы с помощью маркировочного устройства перенести известные объекты на граничную поверхность. Термин "объект" охватывает все элементы, которые могут быть расположены в основе, или элементы, которые можно нанести на граничную поверхность. Примеры объектов - это дверные проемы, прохождение электропроводов и расположение арматурных стержней в металлической решетке.
Необходимое условие для реализации способа согласно изобретению состоит в том, чтобы были известны заданные координаты объекта, подлежащего маркиованию; кроме того, должно быть задано стартовое положение. Заданные координаты могут быть представлены в виде абсолютных координат или координат относительно некоторого ориентира. Особое значение для применения имеет возможность передачи данных инженерно-технической документации (плана строительства) с помощью способа согласно изобретению. В инженерно-технической документации указаны множество объектов со своими свойствами и заданными координатами. Инженерно-техническая документация должна быть изготовлена в форме, пригодной для считывания контрольным устройством, чтобы данные объекта можно было загружать непосредственно из инженерно-технической документации, иначе пользователю придется вручную вводить данные объекта в контрольное устройство.
На первом этапе выбирают подлежащий маркированию первый объект с первым стартовым положением и первыми заданными координатами; размеры первого объекта больше, чем размеры печатного поля. Прежде чем окажется возможным маркирование, маркировочное устройство необходимо разместить над первым объектом. Для этого на втором этапе с помощью локационного устройства определяют текущее положение маркировочного устройства в пространстве. Исходя из текущего положения контрольного устройства контрольное устройство на третьем этапе определяет текущее печатное поле контрольного устройства; связь между текущим положением и полем печати детекторного устройства известна. Затем на четвертом этапе контрольное устройство сравнивает первое стартовое положение с текущим печатным полем маркировочного устройства.
Дальнейшие этапы реализации способа согласно изобретению зависят от сравнения первого стартового положения с текущим печатным полем маркировочного устройства. При этом различают два варианта: в первом варианте первое стартовое положение расположено за пределами текущего печатного поля, а во втором варианте первое стартовое положение расположено в пределах текущего печатного поля.
В первом варианте, если первое стартовое положение расположено за пределами текущего поля печати, контрольное устройство на основании текущего положения маркировочного устройства и первого стартового положения первого объекта рассчитывает инструкцию по перемещению для маркировочного устройства, которая отображается на устройстве отображения.
Во втором предпочтительном варианте, если первое стартовое положение находится в пределах текущего поля печати, то контрольное устройство вырабатывает инструкцию пользователю остановить маркировочное устройство и отображает его на устройстве отображения.
Особо предпочтительно, чтобы, если первое стартовое положение находится в пределах текущего печатного поля, а маркировочное устройство не перемещается, контрольное устройство выдавало маркировочному устройству управляющую команду для маркировки первого объекта. Способ обладает тем преимуществом, что запуск маркировки (обозначения) управляется контрольным устройством.
Особо предпочтительно, чтобы во время маркировки с помощью маркировочного устройства контрольное устройство на основании текущего положения маркировочного устройства вырабатывало инструкцию по перемещению для маркировочного устройства и отображало ее на устройстве отображения. Инструкция по перемещению дает пользователю указания, как передвигать маркировочное устройство по граничной поверхности.
Текущее положение маркировочного устройства определяется локационным устройством с использованием частоты локализации, а данные о положении локационное устройство передает в контрольное устройство на частоте передачи.
Если первые заданные координаты первого объекта расположены за пределами текущего печатного поля, то контрольное устройство выдает маркировочному устройству управляющую команды прервать маркировку первого объекта. Маркировка (сигнал о разметке) передают только тогда, когда маркировочное устройство правильно размещено, а заданные координаты находятся в печатном поле маркировочного устройства.
В усовершенствованном варианте способ согласно изобретению дополнительно отличается тем, что на первом этапе кроме первого объекта выбирают подлежащий маркировке второй объект со вторым стартовым положением и вторыми заданными координатами, а на четвертом этапе помимо первого стартового положения первого объекта с текущим печатным полем маркировочного устройства сравнивают и второе стартовое положение второго объекта. Усовершенствованный способ обладает тем преимуществом, что с помощью маркировочного устройства можно перенести на граничную поверхность несколько объектов. В процессе подготовки к этапу пользователь выбирает подлежащие маркировке объекты, а затем переносит объекты на граничную поверхность.
В первом варианте, если первое стартовое положение находится в пределах текущего печатного поля, контрольное устройство выдает маркировочному устройству управляющую команду для маркировки первого объекта, или если второе стартовое положение находится в пределах текущего печатного поля, то контрольное устройство выдает управляющую команду для маркировки второго объекта.
Особо предпочтительно, чтобы после маркировки одного объекта, исходя из текущего положения маркировочного устройства и стартового положения другого объекта, контрольное устройство рассчитывало инструкцию по перемещению для маркировочного устройства и отображало ее на устройстве отображения.
Во втором варианте, если первое и второе стартовое положение находятся за пределами текущео печатного поля маркировочного устройства, то контрольное устройство, исходя из текущего положения маркировочного устройства, а также первого и второго стартового положения первого и второго объекта, рассчитывает первое и второе расстояние. Особо предпочтительно, чтобы контрольное устройство сравнивало первое и второе расстояние между собой, и для объекта с меньшим расстоянием до текущего положения маркировочного устройства контрольное устройство рассчитывало бы и отображало бы на индикаторном отображения инструкцию по перемещению для маркировочного устройства.
В случае нескольких подлежащих маркировке объектов решающее значение для определения последовательности, в которой объекты переносятся маркировочным устройством на граничную поверхность, имеет расстояние от стартового положения объекта до текущего положения маркировочного устройства.
В усовершенствованном варианте способ согласно изобретению дополнительно отличается тем, что на втором этапе с помощью локационного устройства дополнительно определяют текущую ориентацию маркировочного устройства. Особо предпочтительно, чтобы на третьем этапе на основании текущего положения и текущей ориентации маркировочного устройства определялось текущее печатное поле маркировочного устройства. Определение текущей ориентации повышает точность, с которой можно определить направление маркировочного устройства. Текущую ориентацию маркировочного устройства можно определить, например, с помощью камеры или путем получения разности (положения) нескольких известных меток, нанесенных на маркировочное устройство. Для этого годятся все известные методы для определения ориентации предмета в пространстве.
Предпочтительно, чтобы текущая ориентация маркировочного устройства в пространстве дополнительно учитывалась на всех этапах способа согласно изобретению, которые используют текущее положение маркировочного устройства.
Примеры исполнения
Ниже дано пояснение примеров исполнения изобретения на основании чертежа. Чертеж не обязательно отображает примеры исполнения строго масштабно, напротив, чертеж (там, где он служит пояснению) выполнен в схематическом и/или несколько искаженном виде. Что касается дополнений к положениям, непосредственно видимым из чертежа, то дана ссылка на соответствующий уровень техники. При этом следует учитывать, что возможны разнообразные модификации и изменения, касающиеся формы и подробностей формы исполнения, без отклонения от общей идеи изобретения. Признаки изобретения, изложенные в описании, в чертеже, а также в формуле изобретения, могут быть существенны для варианта исполнения изобретения как каждый по отдельности, так и в произвольном сочетании. Кроме того, изобретение охватывает все сочетания по меньшей мере двух признаков, изложенных в описании, чертеже и/или в формуле изобретения. Общая идея изобретения не ограничена точной формой или подробностями показанной и описанной ниже предпочтительной формы исполнения и не лимитирована предметом, который был бы более ограничен, чем заявленный в форме изобретения предмет. В случае указанных диапазонов параметров значения, лежащие в пределах названных границ, также следует считать изложением граничных значений, необходимо их произвольное применение и испрашивание. В целях простоты изложения ниже для идентичных или сходных деталей или же для деталей с идентичной или сходной функцией применяют одинаковые обозначения.
Представлены:
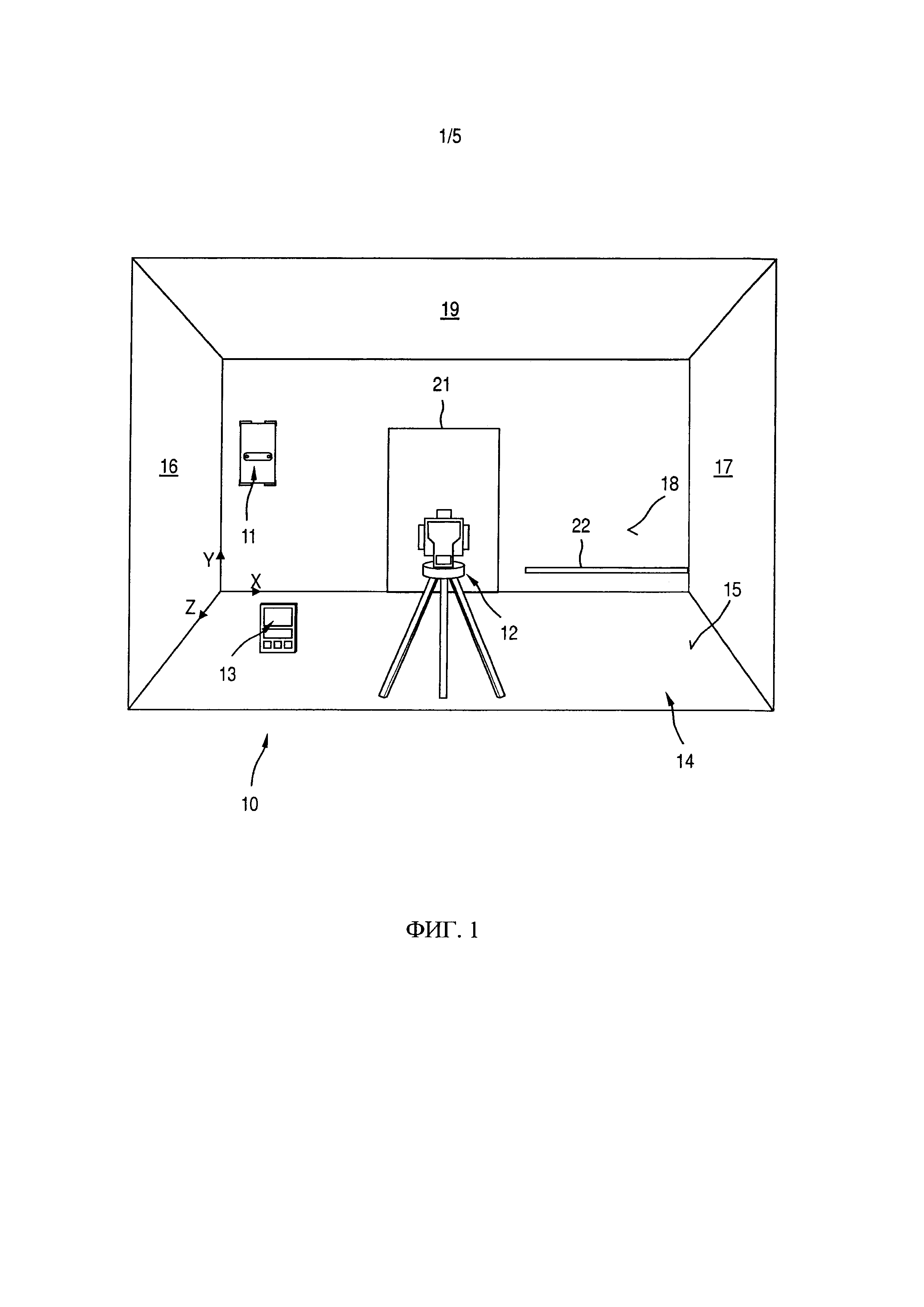
ФИГ. 1 Применение оборудования для переноса объекта на выполненную в виде задней стенки граничную поверхность, с маркировочным устройством, локационным устройством и контрольным устройством;
ФИГ. 2 Задняя стенка ФИГ. 1 с подлежащим маркировке первым объектом и подлежащим маркировке вторым объектом;
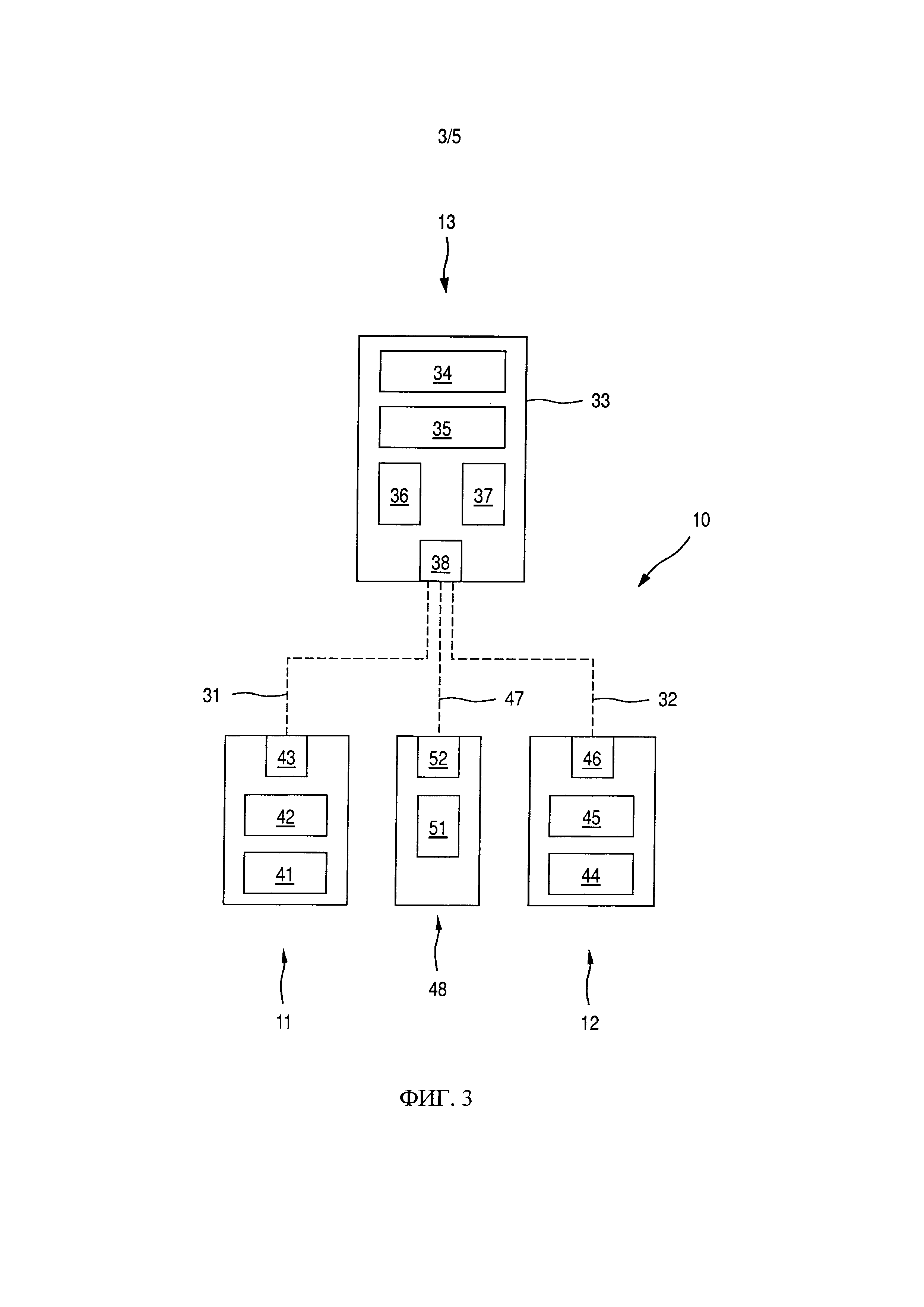
ФИГ. 3 Взаимодействие маркировочного устройства, локационного устройства и контрольного устройства оборудования, показанного на ФИГ. 1, в виде блок-диаграммы;
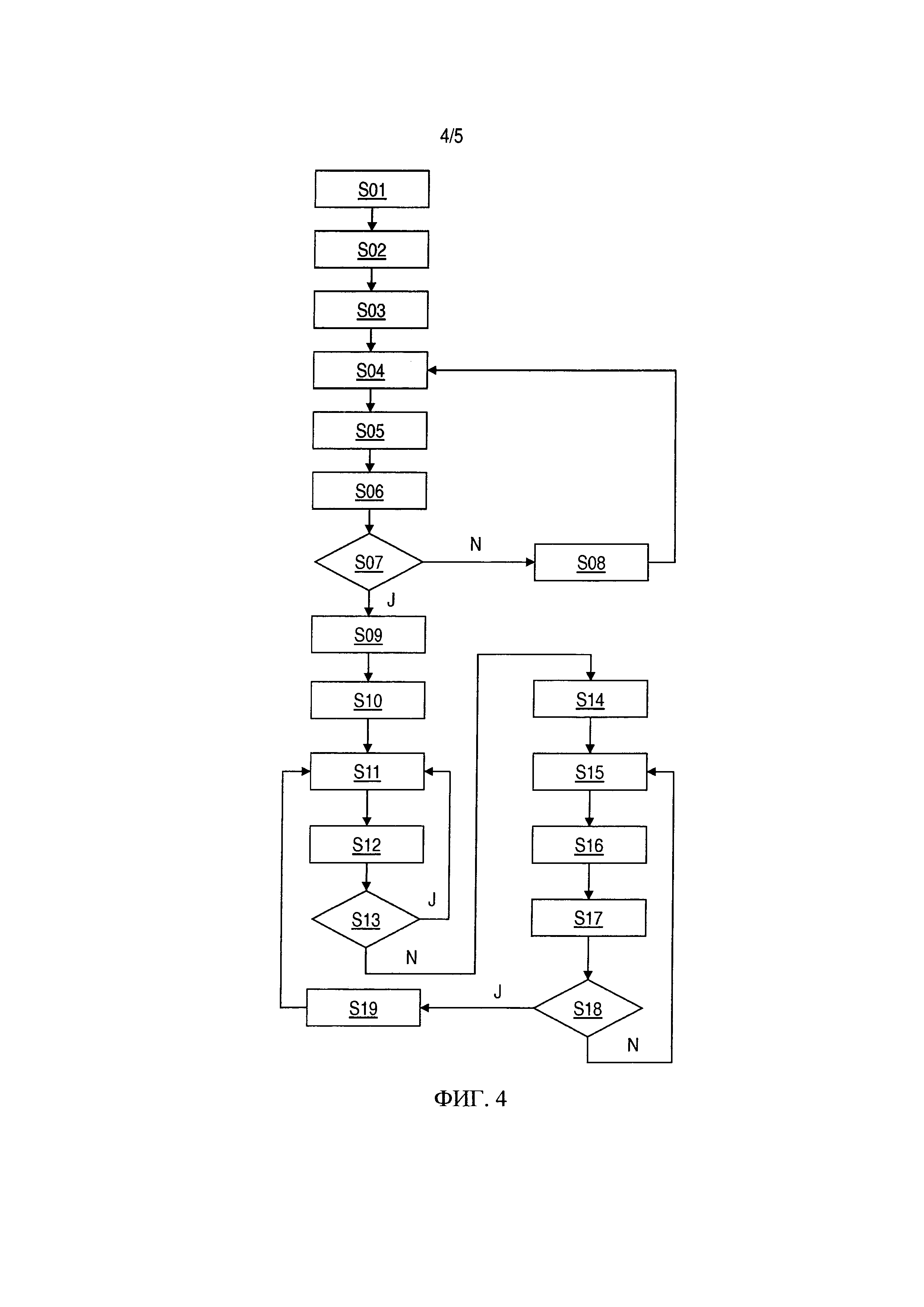
ФИГ. 4 Первый вариант исполнения способа согласно изобретению для переноса объекта, выполненного в виде дверного проема, в форме диаграммы процесса (блок-схемы); и
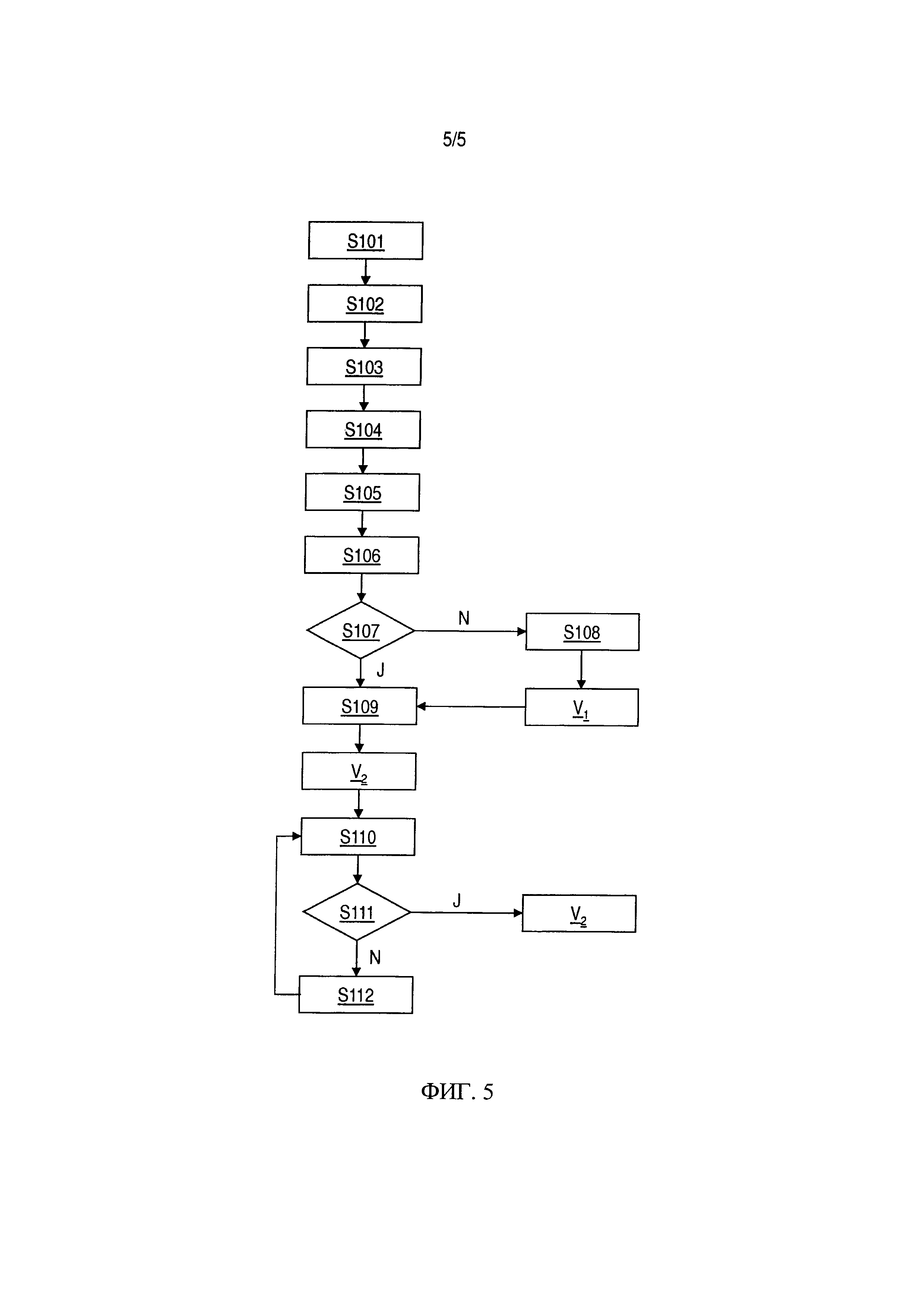
ФИГ. 5 Второй вариант исполнения способа согласно изобретению для переноса первого объекта, выполненного как дверной проем, и второго объекта, выполненного в виде штробы (паза в кладке стены), в форме блок-схемы.
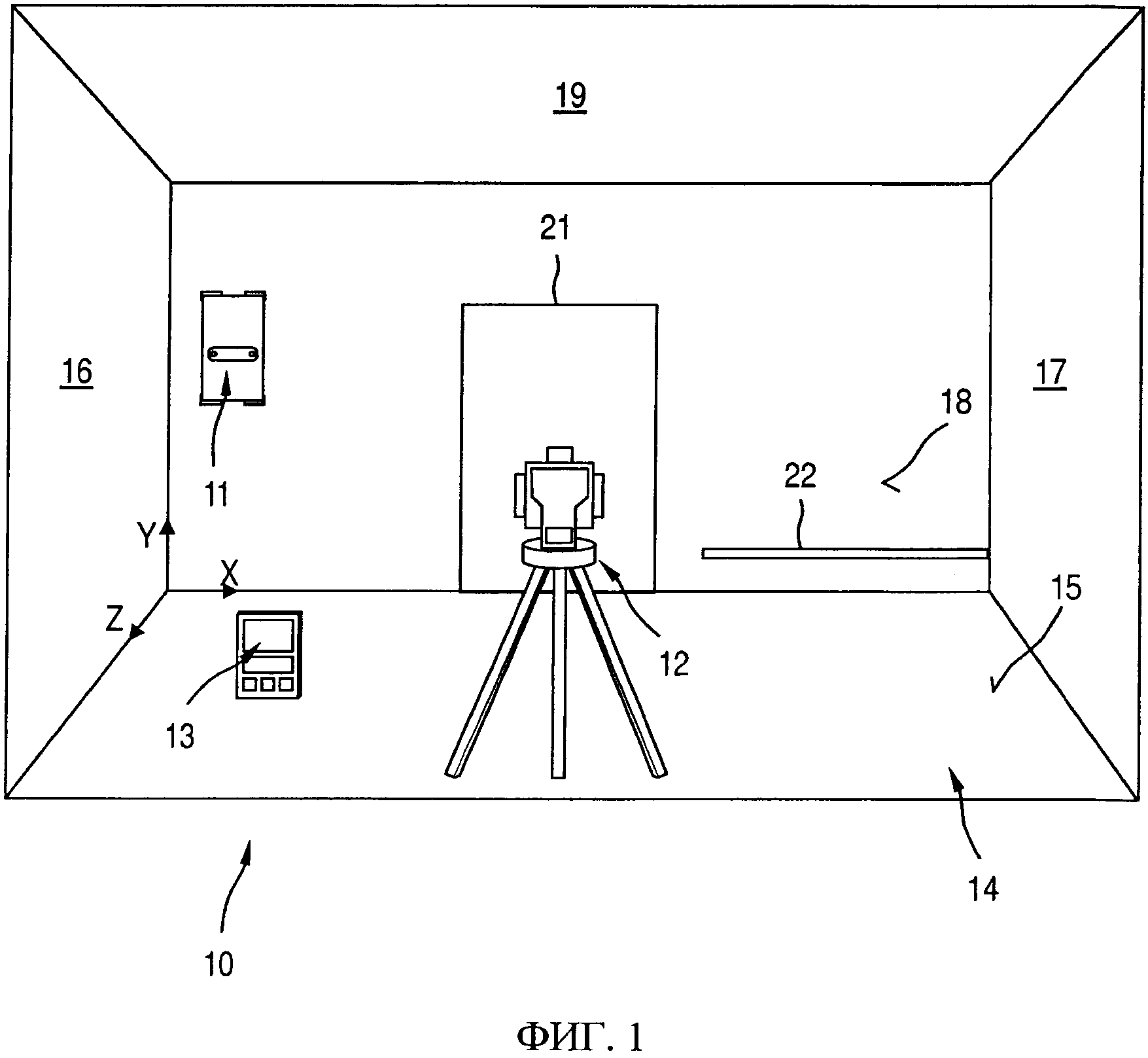
ФИГ. 1 демонстрирует оборудование 10 для реализации способа переноса объекта на граничную поверхность согласно изобретению. Термин "объект" охватывает все элементы, которые могут быть расположены в основе, или элементы, которые можно нанести на граничную поверхность. Примеры объектов - это дверные проемы, прохождение электропроводов и расположение арматуры. Оборудование 10 включает в себя маркировочное устройство 11, локационное устройство 12 и контрольное устройство 13. Маркировочное устройство 11, локационное устройство 12 и контрольное устройство 13 в примере исполнения с ФИГ. 1 выполнены как отдельные компоненты, которые можно соединять коммуникационными проводами (линиями связи), и которые могут обмениваться данными друг с другом. Маркировочное устройство 11 выполнено как ручное маркировочное устройство, которое во время маркировки перемещают по граничной поверхности.
Способ согласно изобретению, описан на примере задачи во внутреннем пространстве 14. Внутреннее пространство 14 состоит из пола 15, левой и правой боковой стенки 16, 17, задней стенки 18 и потолка 19. Ограничения 15-19 внутреннего пространства 14 объединены понятием "границная поверхность". Внутреннее пространство 14 привязано к трехмерной системе координат X, Y, Z, начальная точка (начало координат) которой (0, 0, 0) расположена в левом нижнем углу между полом 15, левой боковой стенкой 16 и задней стенкой 18. В заднюю стенку 18 необходимо встроить дверь и горизонтальный электропровод. Для этой задачи определяют дверной проем в качестве первого объекта 21 и горизонтальную штробу (борозда) в качестве второго объекта 22.
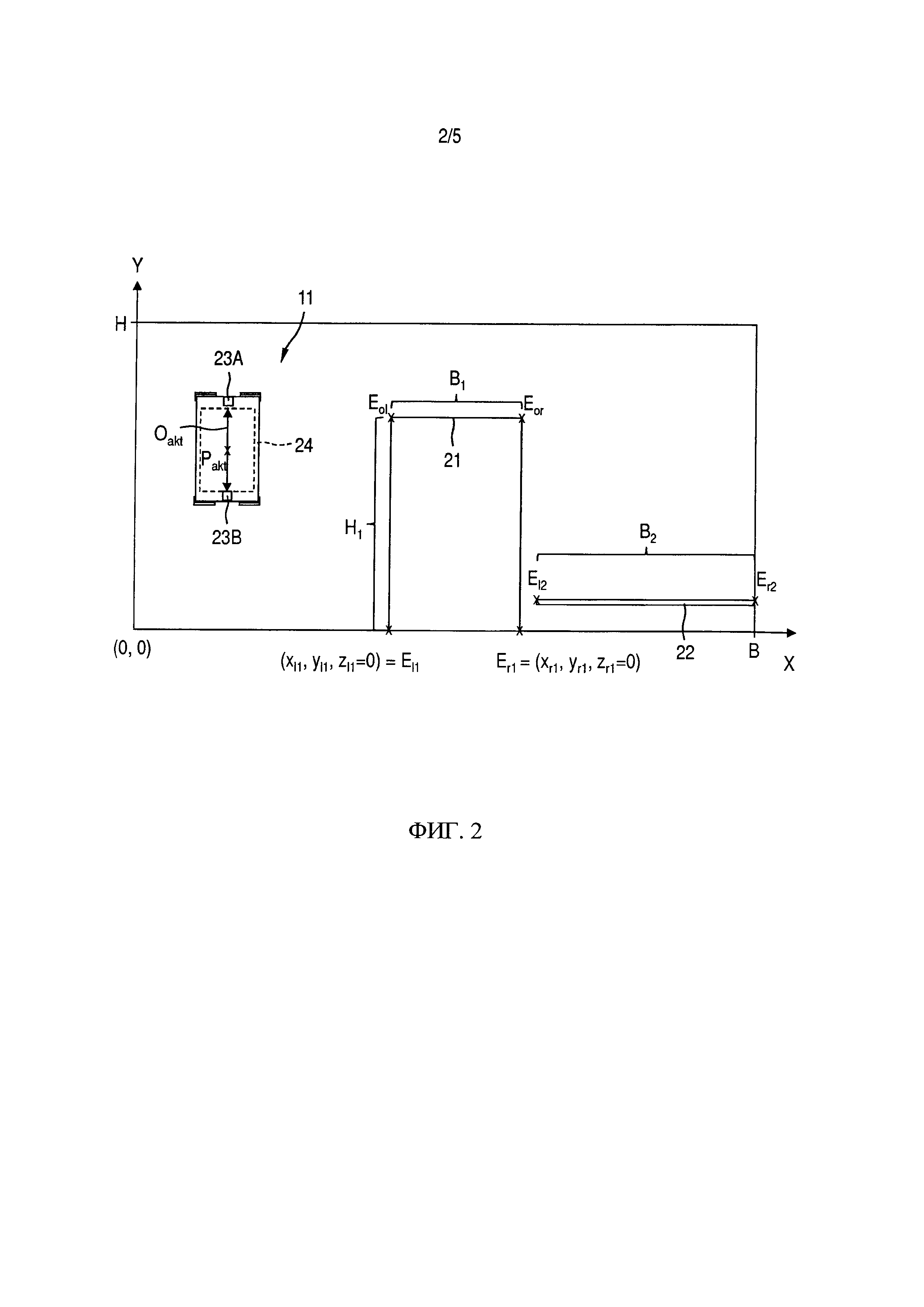
ФИГ. 2 изображает заднюю стенку 18 внутреннего пространства 14 с подлежащим маркировке первым объектом 21 и подлежащим маркировке вторым объектом 22. Задняя стенка 18 лежит в плоскости XY системы координат и в направлении X характеризуется шириной В, а в направлении Y высотой Н.
Прежде чем маркировочное устройство 11 создаст разметку(маркировку), необходимо разместить маркировочное устройство 11 над первым или вторым объектом 21, 22. Для этого с помощью локационного устройства 12 определяют текущее положение Pakt с координатами xakt, уakt, zakt маркировочного устройства 11 во внутреннем пространстве 14. Текущее положение Pakt маркировочного устройства 11 определяют с помощью двух меток локализации 23А, 23В. В настоящем примере исполнения метки локализации 23А, 23В нанесены на верхнюю сторону маркировочного устройства 11. Исходя из текущего положения Pakt маркировочного устройства 11 контрольное устройство 13 определяет текущее печатное поле 24 маркировочного устройства 11. Между положением меток локализации 23А, 23В и печатным полем 24 маркировочного устройства 11 существует известная связь. Текущую ориентацию Oakt маркировочного устройства 11 тоже можно определить с помощью меток локализации 23А, 23В. После того как контрольно устройство 13 определило текущее печатное поле 24 маркировочного устройства, контрольное устройство 13 сравнивает стартовые положения объектов 21, 22 с текущим печатным полем 24 маркировочного устройства 11.
В направлении X дверной проем 21 характеризуется шириной B1, а в направлении Y - высотой H1. В качестве стартового положения для маркировки дверного проема 21 пригодны правая нижняя конечная точка Er1 с координатами xr1, уr1, zr1 и левая нижняя конечная точка El1 с координатами xl1, уl1, zl1. Исходя из стартовых положений El1, Er1, можно без разрыва маркировать на задней стенке 18 наружные очертания дверного проема 21. Верхние конечные точки Eol и Eor, исходя из левой нижней конечной точки, характеризуются координатами xl1, уl1+H1, zl1 и xl1+B1, уl1+H1, zl1. Штроба 22 ограничивается левой конечной точкой El2 с координатами xl2, yl2, zl2 и правой конечной точкой Er2 с координатами xr2, уr2, zr2 и в направлении X характеризуется шириной В2; как горизонтальная штроба она ориентирована параллельно направлению X. В качестве стартового положения для маркировки штробы 22 можно использовать конечные точки El2, Er2.
ФИГ. 3 показывает конструкцию и взаимодействие маркировочного устройства 11, локационного устройства 12 и контрольного устройства 13 в виде блок-диаграммы. Маркировочное устройство 11, локационное устройство 12 и контрольное устройство 13 в примере исполнения выполнены как отдельные компоненты, которые могут обмениваться данными друг с другом по линиям связи. Маркировочное устройство 11 и контрольное устройство 13 можно соединять друг с другом первым коммуникационным соединением 31. Вторым коммуникационным соединением 32 контрольное устройство 13 можно соединять с локационным устройством. Коммуникационные соединения могут быть конструктивно исполнены как беспроводные коммуникационные соединение, например, в форме радиосвязи инфракрасного соединения, соединения Bluetooth, WLAN или Wi-Fi, или же в виде кабельного коммуникационного соединения.
В состав контрольного устройства 13 входят корпус 33, в который интегрированы пульт управления 34 и устройство отображения 35. Пульт управления 34 и устройство отображения 35 могут быть выполнены в виде отдельных деталей, как это показано на ФИГ. 2, или же интегрированы друг с другом, например, в сенсорный экран (тачскрин). Контрольное устройство 13 кроме того имеют элемент анализа и управления 36, элемент памяти 37 и первый элемент приема и передачи 38.
Маркировочное устройство 11 включает в себя печатное устройство 41, управляющий элемент 42 для управления печатным устройством 41 и второй элемент приема и передачи 43. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается первое коммуникационное соединение со вторым элементом приема и передачи 43 маркировочного устройства 11. Управляющие команды для маркировочного устройства 11 передаются с контрольного устройства 13 по первому коммуникационному соединению 31 на управляющий элемент 42 маркировочного устройства 23.
Локационное устройство 12 включает в себя измерительное устройство 44, элемент управления и анализа 45 для управления измерительным устройством 44 и анализа результатов измерений, а также третий элемент приема и передачи 46. Локационное устройство 12 выполнено, например, в виде тахеометра, а измерительное устройство 44 - как инструмент для измерения расстояний и углов. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается второе коммуникационное соединение 32 с третьим элементом приема и передачи 46 локационного устройства 12.
Подлежащие маркировке объекты можно выбрать из инженерно-технической документации и загрузить в контрольное устройство 13. Инженерно-техническая документация может быть записана в элементе памяти 37 контрольного устройства 13, или же контрольное устройство 13 может быть соединено третьим коммуникационным соединением 47 с центральным накопителем 48, который содержит инженерно-техническую документацию. Термин "центральный накопитель" ("центральный блок памяти") охватывает все электронные устройства, служащие для архивирования данных; к ним относятся, например, сервер, ноутбук, компьютер, внешний жесткий диск и карманный компьютер (PDA). По третьему коммуникационному соединению 47 инженерно-техническую документацию можно передать из центрального накопителя 48 на контрольное устройство 13 и сохранить его в элементе памяти 37, или же обработанную инженерно-техническую документацию передают с контрольного устройства 13 в центральный накопитель 48 и архивируют там. Центральный накопитель 48 включает в себя устройство памяти 51 и четвертый элемент приема и передачи 52. С первого элемента приема и передачи 38 контрольного устройства 13 устанавливается третье коммуникационное соединение 47 с четвертым элементом приема и передачи 52 центрального накопителя 48.
ФИГ. 4 демонстрирует первый вариант исполнения способа маркировки объекта согласно изобретению с опорой на блок-схему. Первый вариант исполнения излагается применительно к дверному проему 21, который образует подлежащий проверке первый объект и расположен в задней стенке 18 внутреннего протранства 14.
Пользователь на этапе S01 выбирает с помощью пульта управления 34 дверной проем со стартовым положением El1 и заданными координатами El1, Er1, Eol, Eor на задней стенке 18. До начала реализации способа пользователь может задать одну из конечных точек El1, Er1 в качестве стартового положения, или же во время реализации способа контрольное устройство 13 решает, какая из конечных точек расположена ближе, и задает ее в качестве стартового положения. В примере исполнения ФИГ. 4 в качестве стартового положения задана левая нижняя точка El1 дверного проема 21.
На этапе S02 дверной проем 21 в качестве подлежащего маркировке объекта загружают в контрольное устройство. На этапе S03 пользователь запускает исполнение способа. После старта на этапе S03 локационное устройство 12 на этапе S04 определяет текущее положение Pakt и текущую ориентацию Oakt маркировочного устройства 11 на задней стенке 18, которые на этапе S05 передаются с локационного устройства 12 на контрольное устройство 13. На этапе S06 контрольное устройство 13, исходя из текущего положения и ориентации Pakt, Oakt, определяет текущее печатное поле 24 маркировочного устройства 11 и сравнивает стартовое положение El1 на этапе S07 с текущим печатным полем 24. При этом контрольное устройство 13 на этапе S07 проверяет, расположено ли стартовое положение El1 объекта 21 в пределах текущего печатного поля 24.
Если стартовое положение El1 объекта 21 расположено за пределами текущего печатного поля 24 (N (нет) на S07), то контрольное устройство 13 на этапе S08, исходя из текущего положения и ориентации Pakt, Oakt, маркировочного устройства 11 и стартового положения El1 объекта 21, вырабатывает инструкцию по перемещению для маркировочного устройства 11, которая отображается на устройстве отображения 35. Реализацию способа продолжают этапом S04. Этапы S04 - S07 и S08 совокупно называются этапом "поиска цели" V1.
Если стартовое положение El1 находится в пределах текущего печатного поля 24 (J (да) на S07), то контрольное устройство 13 на этапе S09 выдает управляющую команду на маркировку объекта 21 маркировочному устройству 11 и на этапе S10, исходя из текущего положения и ориентации, Pakt, Oakt и заданных координат El1, Er1, Eol, Eor объекта 21 задает указание по перемещению, как следует передвигать маркировочное устройство 11 над подлежащим маркировке объектом 21. Локационное устройство 12 на этапе S11 определяет текущее положение и ориентацию Pakt, Oakt с использованием частоты локализации и передает данные о положении на контрольное устройство 13. Контрольное устройство 13 на этапе S12, исходя из текущего положения и ориентации Pakt, Oakt, определяет текущее печатное поле 24 и на этапе S13 сравнивает заданные координаты El1, Er1, Eol, Eor подлежащего маркировке объекта 21 с текущим печатным полем 24.
Если заданные координаты El1, Er1, Eol, Eor подлежащего маркировке объекта 21 расположены в пределах текущего печатного поля 24 (J (да) на S13), то способ согласно изобретению продолжается на этапе S11. Если заданные координаты El1, Er1, Eol, Eor подлежащего маркировке объекта 21 расположены за пределами текущего печатного поля 24 (N (нет) на S13), то контрольное устройство 13 на этапе S14 выдает маркировочному устройству 11 управляющую команду прервать маркировку объекта 21. Контрольное устройство 13 на этапе S15, исходя из текущего положения и ориентации, Pakt, Oakt маркировочного устройства 11 и заданных координат El1, Er1, Eol, Eor объекта 21, вырабатывает инструкцию по перемещению, которая отображается на устройстве отображения 35. Текущее положение и ориентацию Pakt, Oakt детекторного устройства 11 на этапе S16 определяют с помощью локационного устройства 12 и передают на контрольное устройство 13. Контрольное устройство 13 на этапе S17, исходя из текущего положения и ориентации, Pakt, Oakt маркировочного устройства 11, определяет текущее печатное поле 24 и на этапе S18 сравнивает заданные координаты объекта 21 с текущим печатным полем 24.
Если заданные координаты объекта 21 расположены за пределами текущего печатного поля 24 (N (нет) на S18), то способ согласно изобретению продолжается на этапе S15. Если заданные координаты объекта 21 расположены в пределах текущего печатного поля 24 (J (да) на S18), то контрольное устройство 13 на этапе S19 вырабатывает управляющую команду маркировочному устройству 11 продолжить маркировку объекта 21. Затем реализацию способа продолжают этапом S11.
ФИГ. 5 демонстрирует второй вариант исполнения способа маркировки первого объекта и второго объекта согласно изобретению с опорой на блок-схему. Описание второго варианта исполнения приводится на примере дверного проема 21 образующего первый подлежащий маркировке объект, и штробы 22, образующей подлежащий маркировке второй объект. При этом дверной проем 21 и штроба 22 расположены в задней стенке 18 внутреннего пространства 14.
Перед началом реализации способа пользователь может задать последовательность, в которой объекты 21, 22 переносят на заднюю стенку 18, или же контрольное устройство 13 решает во время реализации способа, какой из объектов расположен ближе и первым переносится на заднюю стенку 18. В примере исполнения ФИГ. 5 определяют расстояния между стартовыми положениями и текущим положением маркировочного устройства.
Пользователь на этапе S101 выбирает дверной проем 21 с первым стартовым положением El1 и первыми заданными координатами El1, Er1, Eol, Eor в качестве первого объекта и штробу 22 со вторым стартовым положением El2 и вторыми заданными координатами El2, Er2 в качестве второго объекта; на этапе S102 дверной проем 21 и штробу 22 загружают в качестве подлежащих маркировке объектов в контрольное устройство 13. На этапе S103 пользователь запускает исполнение способа.
После старта на этапе S103 локационное устройство 12 на этапе S104 определяет текущее положение Pakt и текущую ориентацию Oakt маркировочного устройства 11 на задней стенке 18, которые на этапе S105 передаются с локационного устройства 12 на контрольное устройство 13. На этапе S106 контрольное устройство 13, исходя из текущего положения и ориентации Pakt, Oakt, определяет текущее печатное поле 24 маркировочного устройства 11 и сравнивает первое и второе стартовое положение El1, El2 на этапе S107 с текущим печатным полем 24. При этом контрольное устройство 13 на этапе S107 проверяет, расположено ли первое стартовое положение El1 первого объекта 21 или второе стартовое положение El2 второго объекта 22 в пределах текущего печатного поля 24.
Если первое и второе стартовое положение El1, El2 расположены за пределами текущего печатного поля 24 (N (нет) на S107), то контрольное устройство 13 на этапе S108, исходя из текущего положения и ориентации, Pakt, Oakt маркировочного устройства 11, рассчитывает первое расстояние d1 до первого стартового положения El1 и второе расстояние d2 до второго стартового положения El1 и для объекта с меньшим расстоянием вырабатывает инструкцию по перемещению для маркировочного устройства 11, которая отображается на устройстве отображения 35. Для объекта с меньшим расстоянием проводят отрезок способа "поиск цели" V1 этапы отрезка способа V1 соответствуют этапам S04-S08.
Если первое стартовое положение El1 первого объекта 21 или второе стартовое положение El2 второго объекта расположено в пределах текущего печатного поля (J (да) на S107), то контрольное устройство 13 на этапе S109 выдает на маркировочное устройство 11 управляющую команду выполнить маркировку (разметку) соответствующего объекта. Дальнейшие этапы процесса, которые реализуют при маркировке объекта, соответствуют этапам S10-S19, которые совокупно называют отрезком процесса "сопровождение цели" V2.
После того как первый из двух объектов 21, 22 маркирован на задней стенке 18, реализацию способа продолжают применительно ко второму из обоих объектов 22, 21. Контрольное устройство 13 на этапе S110, исходя из текущего положения и ориентации, Pakt, Oakt маркировочного устройства 11, определяет текущее печатное поле 24 и на этапе S111 проверяет, расположено ли стартовое положение в пределах текущего печатного поля 24.
Если стартовое положение расположено за пределами текущего печатного поля 24 (N (нет) на S111), то контрольное устройство 13 на этапе S112, исходя из текущего положения и ориентации Pakt, Oakt маркировочного устройства 11 и стартового положения, вырабатывает инструкцию по перемещению для маркировочного устройства 11, которая отображается на устройстве отображения 35; реализацию способа согласно изобретению продолжают на этапе S110. Если стартовое положение находится в пределах текущего печатного поля 24 (J (да) на S111), то реализация способа согласно изобретению продолжается этапом "сопровождение цели" V2.
Способ проверки свойств объекта в основе
Распорный анкер
Огнезащитная лента
Способ детектирования области измерения в основе
Пиротехническое забивающее устройство
Образующая изолирующий слой композиция и ее применение
Патрон для соединения алмазного сверлильного устройства со сверлильной коронкой
Двухкомпонентный строительный раствор и его применение
Забивное устройство, патронная лента и система крепления
Формирующий резьбу шуруп с отдельной резьбовой спиралью и разными частичными углами профиля
Способ детектирования области измерения в основе

