Результат интеллектуальной деятельности: Кран
Вид РИД
Изобретение
Изобретение касается крана с признаками ограничительной части п.1 формулы изобретения.
У подобного крана крановая стрела, а также расположенное на концевой части крана рабочее оборудование или, соответственно, некоторая часть расположенного на концевой части крана рабочего оборудования может двигаться посредством управления крана относительно крановой стрелы при подаче соответствующих управляющих команд пользователем. При этом координация определенных движений крановой стрелы и определенных движений рабочего оборудования или, соответственно, частей рабочего оборудования может ставить высокие требования к пользователю крана и быть связана с повышенными издержками обслуживания и замедленной скоростью работы. Также может возникнуть ошибка обслуживания, например, из-за недостаточно обученного пользователя или вследствие невнимательности, при координации определенных движений крановой стрелы и определенных движений рабочего оборудования или, соответственно, частей рабочего оборудования, а также, при неоптимальном движении рабочего оборудования или, соответственно, частей рабочего оборудования, повреждения крана, рабочего оборудования, при необходимости поднимаемого груза или основания, которое служит опорной поверхностью для крана или поверхностью для складывания при необходимости поднимаемого груза.
Задачей изобретения является предложить кран, обладающий возможностью облегченного обслуживания, а также повышенной безопасностью в отношении ошибки обслуживания.
Эта задача решается с помощью крана с признаками п.1 формулы изобретения. Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Как и указанный кран, предлагаемый изобретением кран также имеет, во-первых, по меньшей мере одну крановую стрелу, имеющую концевую часть крана, при этом на концевой части крана может располагаться рабочее оборудование. Под концевой частью крана может, например, пониматься свободный конец крановой стрелы. Само рабочее оборудование и/или по меньшей мере некоторая часть рабочего оборудования может двигаться относительно концевой части крана. Под рабочим оборудованием может, в принципе, пониматься располагаемая на концевой части крана навесная часть для манипуляции объектами или предметами, например, поднимаемым грузом. С помощью управления крана могут активироваться указанная по меньшей мере одна крановая стрела и рабочее оборудование и/или указанная по меньшей мере одна часть рабочего оборудования, при этом управление крана выполнено в первом рабочем режиме для подачи управляющих команд пользователем для движения указанной по меньшей мере одной крановой стрелы и для движения рабочего оборудования и/или для движения указанной по меньшей мере одной части рабочего оборудования. Говоря другими словами, пользователь в первом рабочем режиме управления крана может подавать эти управляющие команды крановой стреле и рабочему оборудованию (соответственно, указанной по меньшей мере одной части рабочего оборудования). При этом крановая стрела и рабочее оборудование (соответственно, указанная по меньшей мере одна подвижная часть рабочего оборудования) могут активироваться отдельно друг от друга или же вместе путем подачи пользователем соответствующих управляющих команд. Крановая стрела крана, соответственно, концевая часть крана крановой стрелы может в первом рабочем режиме управления крана, в пределах возможной, конструктивно обусловленной области движения и при необходимости с использованием устойчивости крана, двигаться по существу свободно.
В противоположность кранам, известным в уровне техники, управление предлагаемого изобретением крана имеет активируемый другой рабочий режим, в котором управление крана выполнено для того, чтобы при расположенном на концевой части крана рабочем оборудовании при подаче предопределенных управляющих команд пользователем для движения расположенного на концевой части крана рабочего оборудования и/или для движения указанной по меньшей мере одной части расположенного на концевой части крана рабочего оборудования управлением крана для по меньшей мере частичной компенсации по меньшей мере одной компоненты движения рабочего оборудования и/или движения указанной по меньшей мере одной части рабочего оборудования могли подаваться дополнительные управляющие команды для движения указанной по меньшей мере одной крановой стрелы.
Этот другой рабочий режим может, например, активироваться пользователем перед, соответственно, при выполнении определенных рабочих процессов с помощью рабочего оборудования, т.е. управление крана переключаться пользователем в другой рабочий режим. Однако, активирование другого рабочего режима может также осуществляться автоматически, например, при распознавании выполнения определенных рабочих процессов с помощью рабочего оборудования. Крановая стрела крана, соответственно, концевая часть крана крановой стрелы может, в принципе, также во втором рабочем режиме управления крана, в пределах возможной, конструктивно обусловленной области движения и при необходимости с использованием устойчивости крана, двигаться по существу свободно.
Под предопределенными управляющими командами для движения рабочего оборудования, расположенного на концевой части крана, и/или для движения указанной по меньшей мере одной части расположенного на концевой части крана рабочего оборудования могут пониматься возможные рабочие движения рабочего оборудования. Так, предопределенные управляющие команды в одном из примеров осуществления рабочего оборудования в виде грейфера, имеющего две или несколько обладающих возможностью движения друг относительно друга грейферных губок или грейферных челюстей, могут включать в себя управляющие команды для движения открытия и/или закрытия грейферных губок или грейферных челюстей. В случае другого примера осуществления рабочего оборудования в виде черпака (называемой также лопатой-волокушей или ковшом экскаватора) предопределенные управляющие команды могут включать в себя подаваемые пользователем управляющие команды для относительного движения черпака по отношению к крановой стреле или, соответственно, концевой части крана.
Итак, управление крана выполнено для того, чтобы при подаче таких названных в качестве примера, предопределенных управляющих команд пользователем управлением крана могли подаваться дополнительные управляющие команды для движения указанной по меньшей мере одной крановой стрелы. То есть дополнительно к управляющим командам, подаваемым пользователем рабочему оборудованию, управлением крана могут подаваться управляющие команды для движения крановой стрелы, соответственно, по меньшей мере некоторой части крановой стрелы. Эти дополнительные управляющие команды для движения указанной по меньшей мере одной крановой стрелы служат для по меньшей мере частичной компенсации по меньшей мере одной компоненты движения рабочего оборудования и/или движения указанной по меньшей мере одной части рабочего оборудования. То есть с помощью дополнительных управляющих команд части движения рабочего оборудования могут по меньшей мере частично компенсироваться движением крановой стрелы.
При этом может быть предпочтительно, чтобы дополнительные управляющие команды могли подаваться в зависимости от по меньшей мере одного параметра движения рабочего оборудования, расположенного на концевой части крана, и/или движения указанной по меньшей мере одной части рабочего оборудования, расположенного на концевой части крана. При этом могут быть предусмотрены соответствующие сенсоры для регистрации указанного параметра движения рабочего оборудования, соответственно, указанной по меньшей мере одной движущейся части рабочего оборудования. Дополнительные управляющие команды могут подаваться пропорционально указанному по меньшей мере одному параметру движения рабочего оборудования, расположенного на концевой части крана, и/или движения указанной по меньшей мере одной части рабочего оборудования, расположенного на концевой части крана.
В принципе, может быть предпочтительно, чтобы дополнительные управляющие команды могли подаваться управлением крана по существу одновременно с подачей предопределенных управляющих команд для движения рабочего оборудования и/или указанной по меньшей мере одной части рабочего оборудования. Так по меньшей мере частично компенсация некоторой части движения рабочего оборудования может осуществляться одновременно с движением рабочего оборудования.
Далее, может быть предпочтительно, чтобы при движении крановой стрелы с помощью дополнительных управляющих команд крана концевая часть крана могла передвигаться в плоскости крановой стрелы. При этом положение крановой стрелы, соответственно, положение частей крановой стрелы друг относительно друга может быть изменяемо с помощью дополнительных управляющих команд.
Может быть также предпочтительно, чтобы при движении крановой стрелы с помощью дополнительных управляющих команд управления крана концевая часть крана могла передвигаться в направлении указанной по меньшей мере одной компоненты - предпочтительно по прямой. Активирование крановой стрелы с помощью дополнительных команд управления может осуществляться таким образом, чтобы концевая часть крана двигалась в направлении компенсируемой части движения, причем это предпочтительно осуществляется по прямой. Направление движения концевой части крана может при этом проходить по существу противоположно направлению компенсируемой части движения рабочего оборудования и/или компенсируемой части движения указанной по меньшей мере одной движущейся части рабочего оборудования.
Может быть предусмотрено, чтобы движение рабочего оборудования и/или указанной по меньшей мере одной части рабочего оборудования представляло собой поворотное движение относительно концевой части крана. При этом само рабочее оборудование может совершать поворотное движение относительно концевой части крана и/или некоторая движущаяся часть рабочего оборудования совершать поворотное движение относительно концевой части крана.
Может быть предусмотрено, чтобы крановая стрела имела по меньшей мере одну, предпочтительно обладающую возможностью вращения вокруг вертикальной оси вращения, мачту крана и по меньшей мере одну, опертую на мачту крана с возможностью поворота, предпочтительно вокруг первой горизонтальной оси поворота, подъемную стрелу, причем эта подъемная стрела предпочтительно имеет по меньшей мере одну выдвижную стрелу.
При этом может быть предпочтительно, чтобы крановая стрела имела также по меньшей мере одну, опертую на подъемную стрелу с возможностью поворота, предпочтительно вокруг второй горизонтальной оси поворота, сочлененную (далее называется также как «шарнирно-сочлененная») стрелу, так называемый гусек, при этом шарнирно-сочлененная стрела предпочтительно имеет по меньшей мере одну выдвижную стрелу.
При этом может быть также предпочтительно, чтобы крановая стрела также имела по меньшей мере одну, опертую на шарнирно-сочлененную стрелу с возможностью поворота, предпочтительно вокруг третьей горизонтальной оси поворота, приставную шарнирно-сочлененную стрелу, так называемую конфигурацию «гусек в гуське», причем эта приставная шарнирно-сочлененная стрела предпочтительно имеет по меньшей мере одну выдвижную стрелу.
В принципе, может быть предусмотрено, чтобы управление крана имело по меньшей мере одну память для записи данных, специфических для крана, и/или данных, специфических для располагаемого на кране рабочего оборудования. Данные, специфические для крана, могут включать в себя информацию об исполнении крана, такую как, например, длины стрел, количество и длина выдвижных стрел и тому подобное. Данные, специфические для располагаемого на кране рабочего оборудования, могут включать в себя информацию об исполнении рабочего оборудования, такую как, например, количество и длина, соответственно, размер грейферных губок, соответственно, грейферных челюстей в одном из примеров осуществления рабочего оборудования в виде грейфера. Также управление крана может включать в себя сигнальные входы для подвода сенсорных сигналов от сенсоров, располагаемых на кране, и/или от сенсоров, располагаемых на рабочем оборудовании, расположенном на кране. С помощью сенсоров, располагаемых на кране, может обеспечиваться регистрация положения, соответственно, геометрии крана, соответственно, крановой стрелы. С помощью сенсоров, располагаемых на рабочем оборудовании, может регистрироваться относительное положение рабочего оборудования по отношению к концевой части крана, соответственно, положение указанной по меньшей мере одной движущейся части рабочего оборудования. Также управление крана может включать в себя сигнальные выходы для подачи управляющих сигналов для указанной по меньшей мере одной крановой стрелы и/или рабочего оборудования и/или указанной по меньшей мере одной части рабочего оборудования. При этом управляющие сигналы, подаваемые через сигнальные выходы, могут, например, подаваться для преобразования движения управляющих устройств, таких как, например, управляющие клапаны крана. Кроме того, управление крана может иметь обслуживаемые пользователем элементы обслуживания для генерирования, соответственно, подачи управляющих команд для движения указанной по меньшей мере одной крановой стрелы и/или рабочего оборудования и/или указанной по меньшей мере одной части рабочего оборудования.
Также управление крана может иметь вычислительный блок для обработки данных из памяти и сенсорных сигналов и для генерирования управляющих команд.
Может быть предпочтительно, чтобы управление крана было выполнено для того, чтобы управлению крана могло задаваться пользователем какое-либо расположенное на концевой части крана рабочее оборудование и/или управлением крана могло автоматически распознаваться какое-либо расположенное на концевой части крана рабочее оборудование. Так, управлению крана может задаваться информация, специфическая для расположенного на концевой части крана рабочего оборудования, соответственно, эта информация может автоматически распознаваться управлением крана. Подача дополнительных управляющих команд может осуществляться в зависимости от заданного и/или распознанного рабочего оборудования на основании специфической для этого рабочего оборудования информации.
При расположенном на концевой части крана рабочем оборудовании может быть предпочтительно, чтобы рабочее оборудование было выполнено в виде грейфера, имеющего по меньшей мере две, обладающие возможностью поворотного движения каждая вокруг собственного места опоры на рабочем оборудовании, грейферные губки, имеющие грейферные зубья, или имеющего по меньшей мере две обладающие возможностью поворотного движения каждая вокруг собственного места опоры на рабочем оборудовании грейферные челюсти, имеющие грейферные режущие кромки. При этом движению рабочего оборудования может соответствовать поворотное движение (движение открытия и/или закрытия) грейферных губок, соответственно, грейферных челюстей. При таком движении рабочего оборудования грейферные зубья, соответственно, грейферные режущие кромки могут двигаться по траектории, по существу по меньшей мере на отдельных участках искривленной в виде окружности, вокруг мест опоры на рабочем оборудовании.
При этом может быть предпочтительно, чтобы при движении крановой стрелы с помощью дополнительных управляющих команд грейферные зубья или грейферные режущие кромки при движении открытия и/или закрытия грейферных губок или грейферных челюстей двигались по существу по прямой, соответственно, в одной плоскости. Получающееся при дополнительных управляющих командах движение крановой стрелы может двигать концевую часть крана таким образом, что происходит по меньшей мере частичная компенсация по меньшей мере одной компоненты движения открытия и/или закрытия грейферных губок или грейферных челюстей. То есть может компенсироваться некоторая компонента поворотного движения рабочего оборудования и/или поворотного движения указанной по меньшей мере одной движущейся части рабочего оборудования, происходящего при движении открытия и/или закрытия, так что грейферные зубья или грейферные режущие кромки по существу больше не движутся по круглой траектории, а эффективно движутся по существу прямолинейно. Так, при движении открытия и/или закрытия грейферных губок или грейферных челюстей грейферные зубья или грейферные режущие кромки могут, например, эффективно двигаться по существу прямолинейно друг от друга, соответственно, друг к другу. Так, например, при свободно висящем на концевой части крана грейфере может достигаться движение грейферных зубьев или грейферных челюстей, проходящее по существу горизонтально и на неизменной высоте (измеренной от пола, на котором установлен кран, соответственно, также от нижней кромки мачты крана).
При этом может быть предпочтительно, чтобы указанная по меньшей мере частично компенсируемая компонента движения представляла собой изменяющееся при движении открытия и/или закрытия нормальное расстояние от указанной прямой, соответственно, плоскости до данного места опоры. Нормальное расстояние относится при этом к измеренному кратчайшим путем расстоянию до указанной прямой или, соответственно, плоскости, вдоль, соответственно, по которой эффективно движутся грейферные зубья или грейферные режущие кромки, до данного места опоры. При движении закрытия грейферных губок, соответственно, грейферных челюстей нормальное расстояние до указанной прямой, соответственно, плоскости может увеличиваться, а при движении открытия оно может уменьшаться. Крановая стрела может двигаться с помощью дополнительных управляющих команд таким образом, чтобы движением концевой части крана компенсировалось увеличение, соответственно, уменьшение нормального расстояния.
Также при этом может быть предпочтительно, чтобы предопределенные управляющие команды пользователя для движения рабочего оборудования и/или для движения указанной по меньшей мере одной части рабочего оборудования включали в себя управляющие команды для открытия и/или закрытия грейферных губок, или грейферных челюстей грейфера. Так, при подаче управляющих команд пользователем посредством управления крана для открытия и/или закрытия грейферных губок или грейферных челюстей выполненного в виде грейфера рабочего оборудования, имеющего две или несколько движущихся друг относительно друга грейферных губок или грейферных челюстей, управлением крана могут подаваться дополнительные управляющие команды для по меньшей мере частичной компенсации по меньшей мере одной компоненты движений, выполняемых при движении открытия и/или закрытия грейферных губок или грейферных челюстей.
Также может быть предпочтительно, чтобы указанный по меньшей мере один параметр движения представлял собой угол открытия и/или закрытия грейферных губок или грейферных челюстей. При этом на грейфере могут быть предусмотрены соответствующие сенсоры для регистрации угла открытия и/или закрытия грейферных губок или грейферных челюстей. Дополнительные управляющие команды могут подаваться пропорционально зарегистрированному углу открытия и/или закрытия грейферных губок или грейферных челюстей.
Другие подробности и преимущества настоящего изобретения поясняются подробнее далее с помощью описания фигур со ссылкой на примеры осуществления, изображенные на чертежах. На них показано:
фиг.1a и 1b: вид сбоку и местные виды первого варианта осуществления крана;
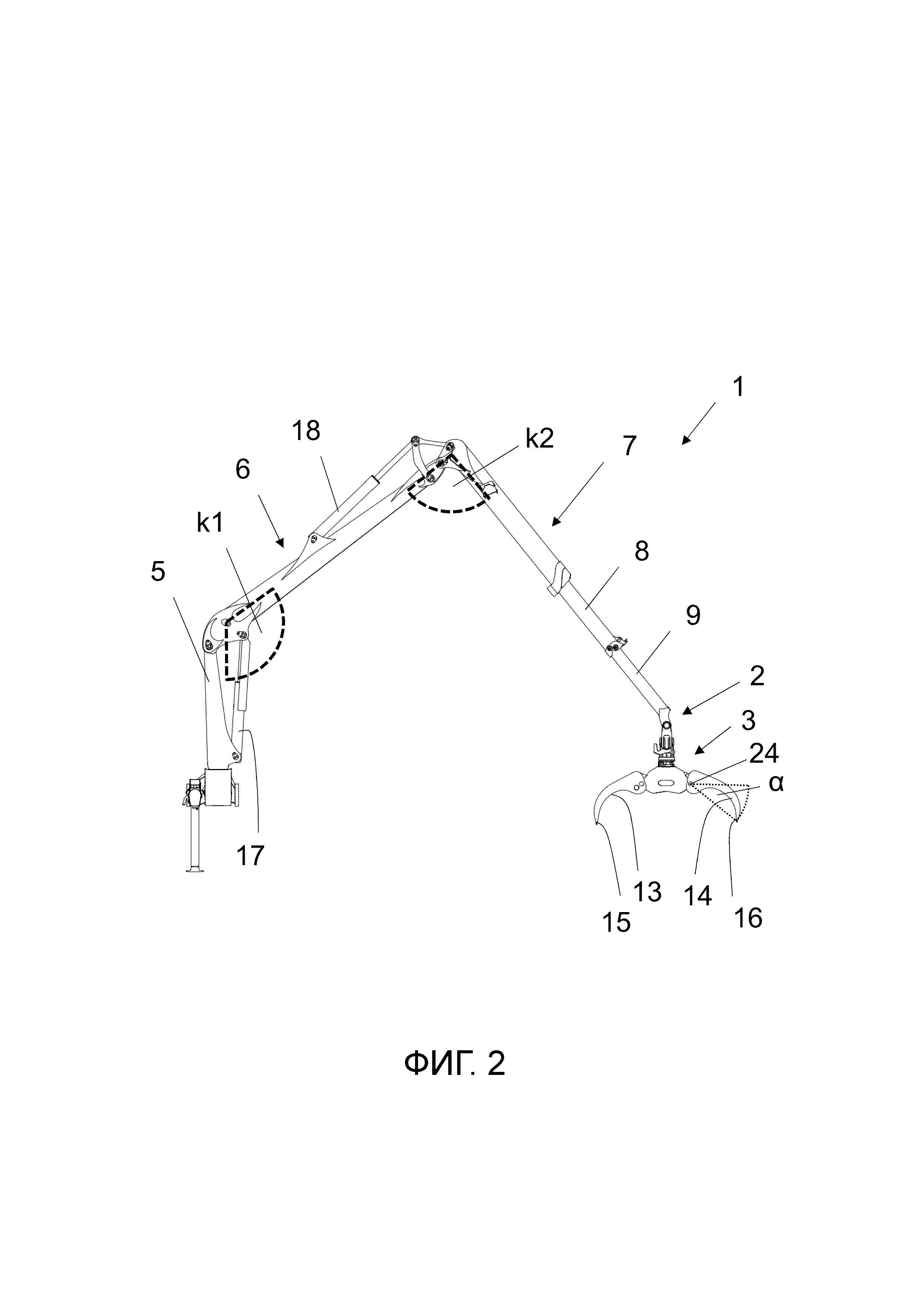
фиг.2: вид сбоку второго варианта осуществления крана;
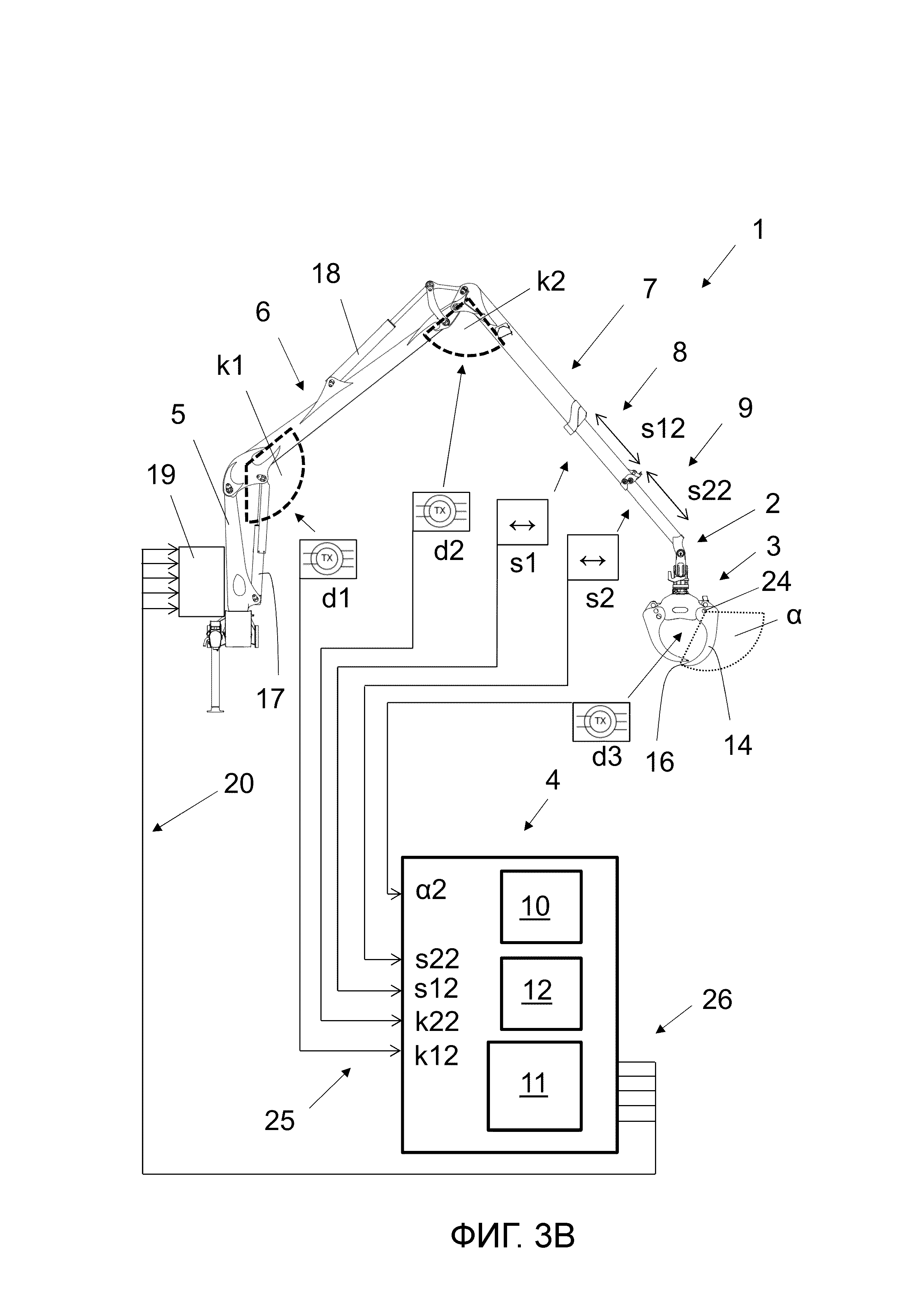
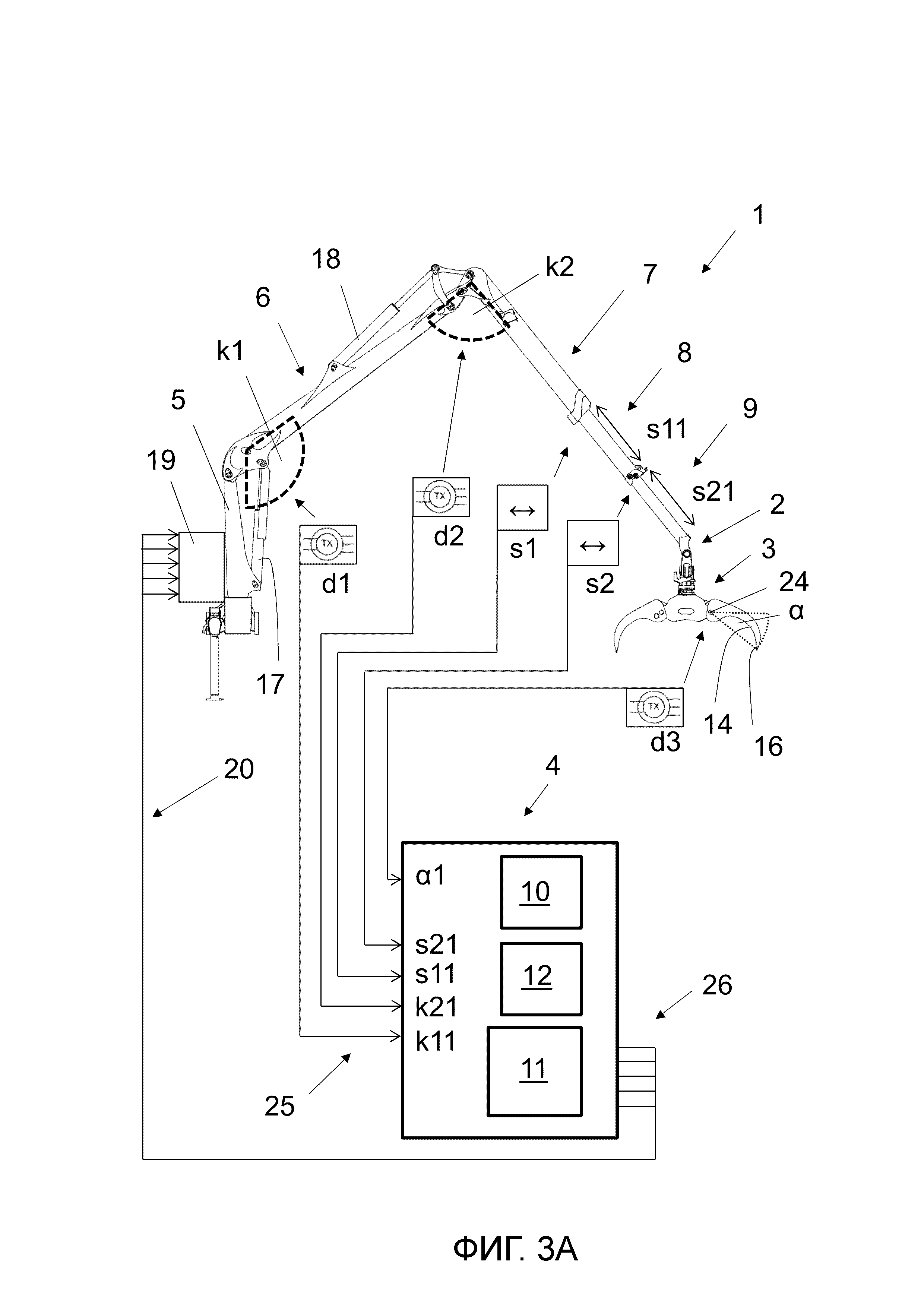
фиг.3a и 3b: виды сбоку ко второму варианту осуществления крана, и в каждом случае схематичное изображение управления крана, имеющего сенсорику;
фиг.4: виды сбоку второго варианта осуществления крана;
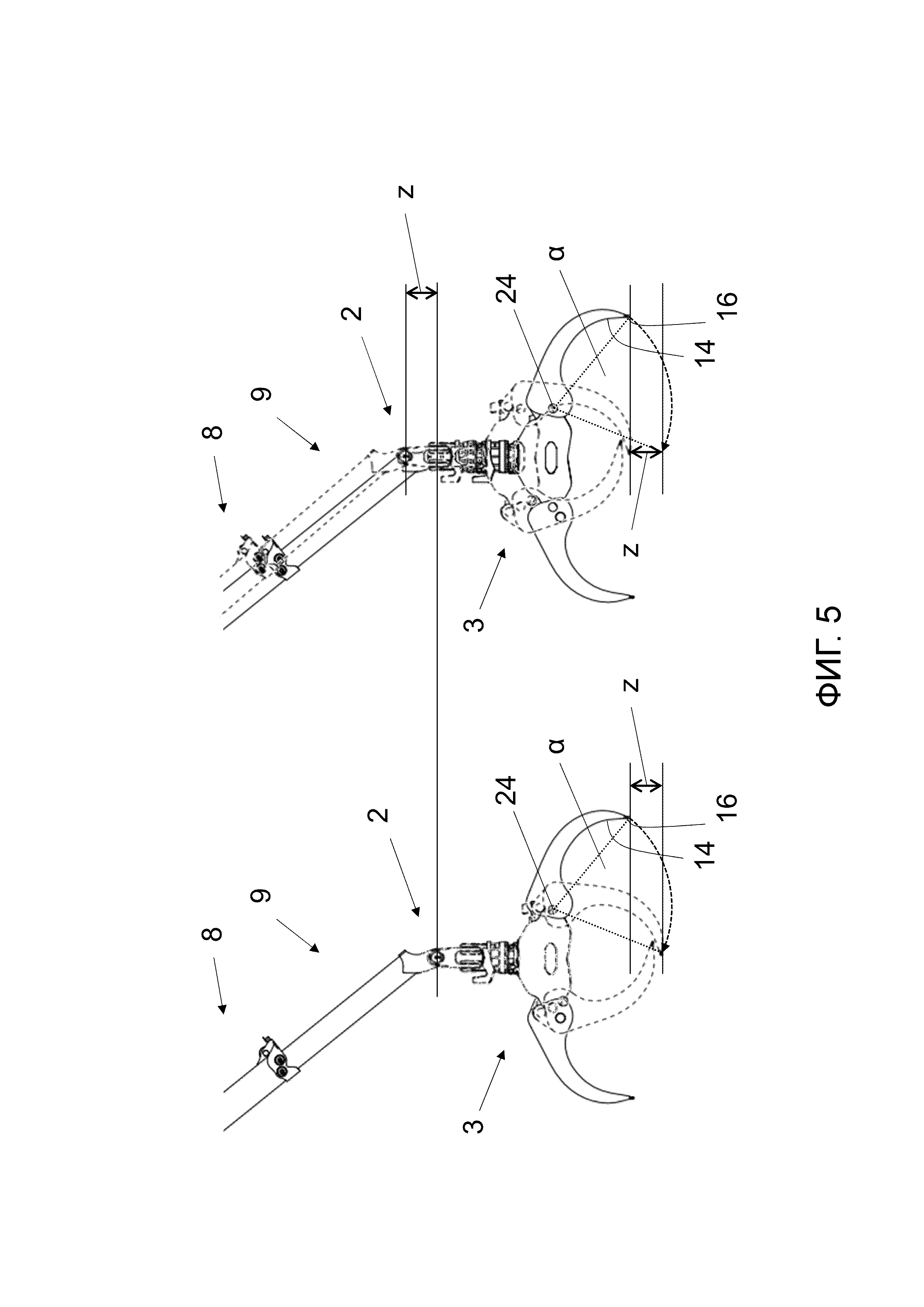
фиг.5: местный вид второго варианта осуществления крана;
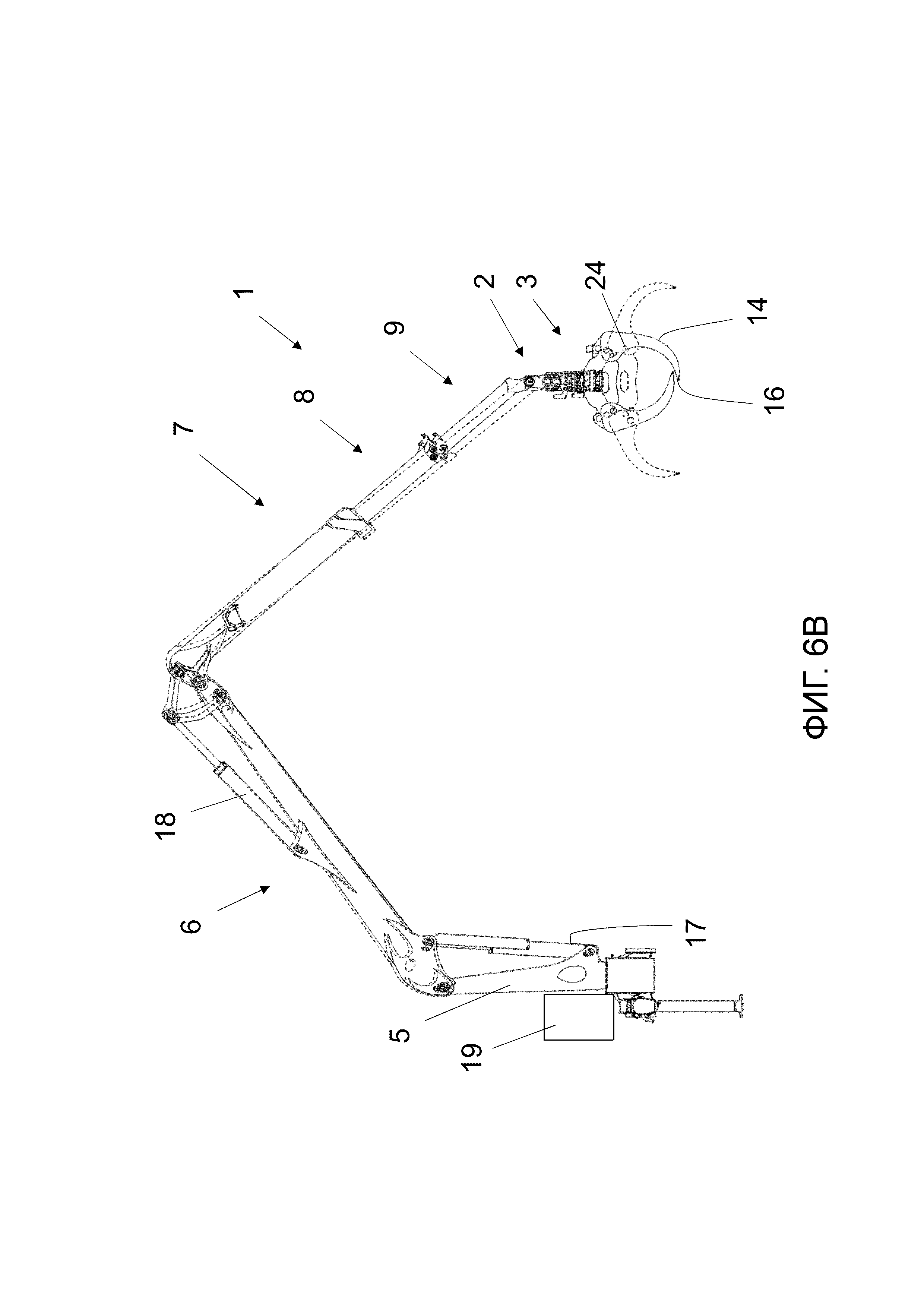
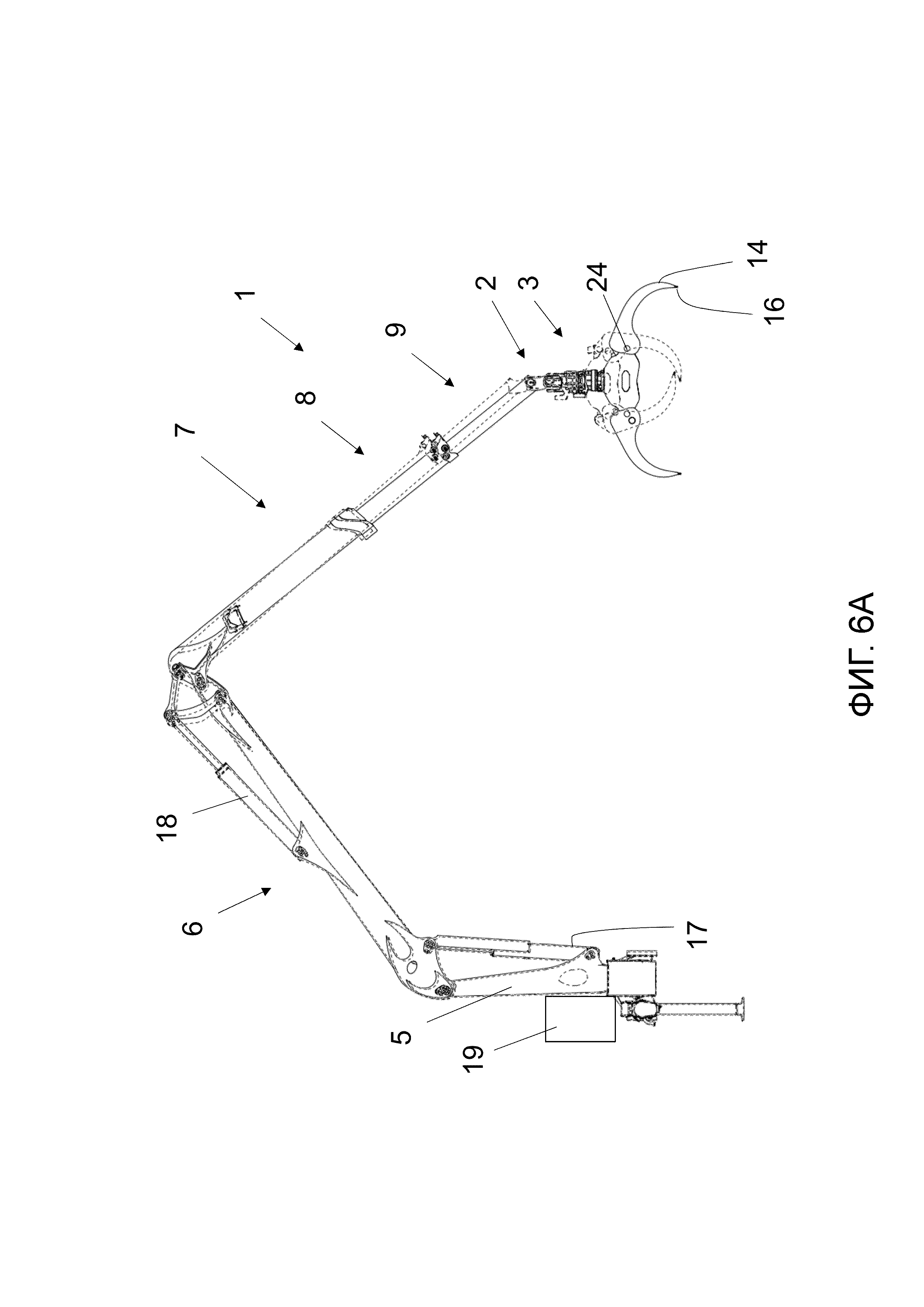
фиг.6a и 6b: другие виды сбоку второго варианта осуществления крана;
фиг.7: третий вариант осуществления крана, и
фиг.8: транспортное средство, имеющее третий вариант осуществления крана.
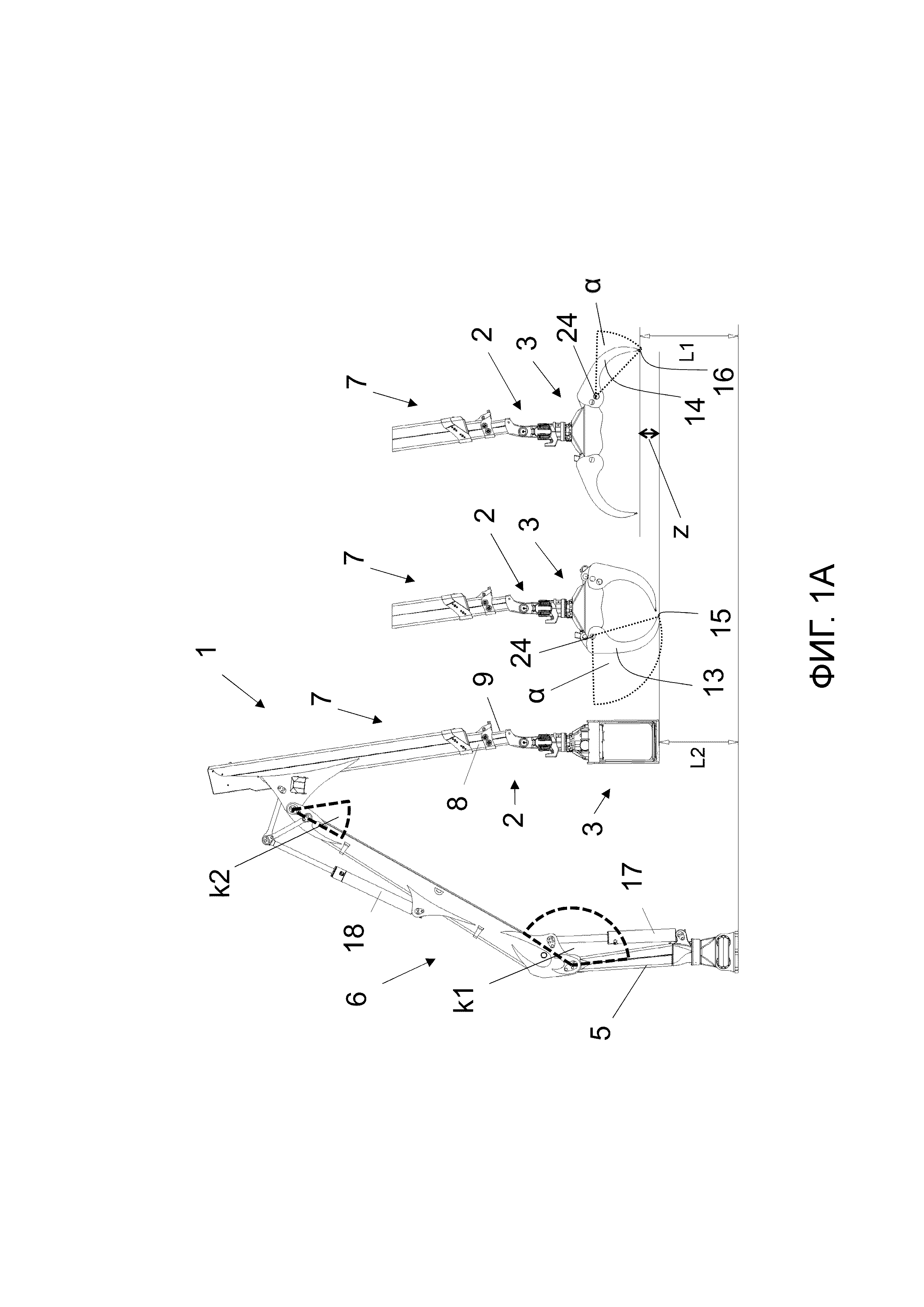
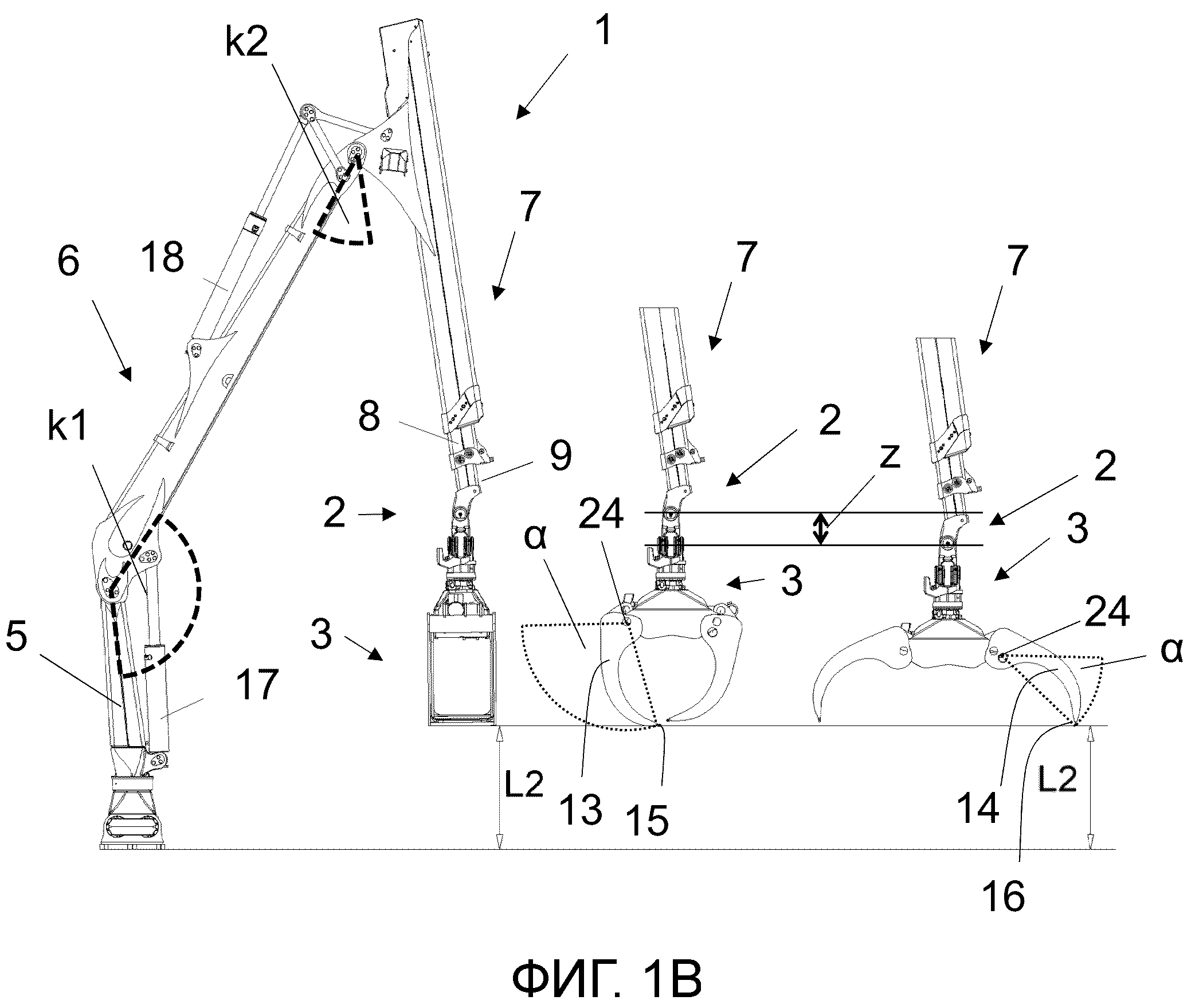
На фиг.1a показаны вид сбоку и местные виды первого варианта осуществления крана 1, имеющего (при необходимости обладающую возможностью вращения вокруг вертикальной оси вращения) мачту 5 крана, опертую на мачту с возможностью поворота подъемную стрелу 6 и опертую на подъемную стрелу с возможностью поворота шарнирно-сочлененную стрелу 7. В показанном положении крана 1 подъемная стрела 6 расположена на мачте 5 крана под первым углом k1 шарнирного сочленения, а шарнирно-сочлененная стрела 7 расположена на подъемной стреле 6 под вторым углом k2 шарнирного сочленения. Для поворота подъемной стрелы 6, соответственно, шарнирно-сочлененной стрелы 7 предусмотрен главный цилиндр 17, соответственно, шарнирно-сочлененный цилиндр 18. Шарнирно-сочлененная стрела 7 в показанном варианте осуществления 2 имеет две выдвижные стрелы 8, 9, посредством которых может изменяться длина шарнирно-сочлененной стрелы 7. На концевой части 2 крана, которая в показанном варианте осуществления образуется свободным концом шарнирно-сочлененной стрелы 7, расположено свободно висящее рабочее оборудование 3 в виде грейфера. Крановая стрела крана 1 включает в себя, как изображено в этом варианте осуществления, мачту 5 крана, подъемную стрелу 6 и шарнирно-сочлененную стрелу 7 вместе с ее выдвижными стрелами 8, 9.
На находящихся рядом местных видах показан в каждом случае нижний участок шарнирно-сочлененной стрелы 7 вместе с расположенным на нем рабочим оборудованием 3 в виде грейфера, при этом грейфер в показанном варианте осуществления повернут относительно находящегося слева общего вида крана 1 на 90°, вследствие чего видны две грейферные губки 13, 14, имеющие грейферные зубья 15, 16. Грейферные губки 13, 14 оперты с возможностью поворота вокруг мест 24 опоры. Угол открытия грейфера, соответственно, грейферных губок 13, 14 снабжен ссылочным обозначением α. На первом местном виде грейфер показан в закрытом положении грейферных губок 13, 14, а на втором местном виде грейфер показан в открытом положении грейферных губок 13, 14. Поскольку крановая стрела крана 1 сама не движется, вследствие поворота грейферных губок 13, 14 при открытии и/или закрытии для грейферных зубьев 15, 16 получаются различные высоты (вертикальные расстояния) относительно, например, нижней кромки мачты 5 крана, положение которой изображено горизонтально проходящей на чертеже линией. Так, например, в закрытом положении грейфера получается по существу первое расстояние L1 от грейферных зубьев 15, 16 до нижней кромки мачты 5 крана. В открытом положении грейфера получается по существу второе расстояние L2 от грейферных зубьев 15, 16 до нижней кромки мачты 5 крана. Разность расстояний L1, L2 снабжена ссылочным обозначением z, и соответствует, как изображено, вертикальной компоненте поворотного движения грейферных губок 15, 16. Изображенное открытое, соответственно, закрытое положение выполненного в виде грейфера рабочего оборудования 3 получается, например, при активировании рабочего оборудования 3 в первом рабочем режиме управления крана (на фиг.1a, соответственно, 1b не изображено, соответствующие детали см., например, на фиг.3).
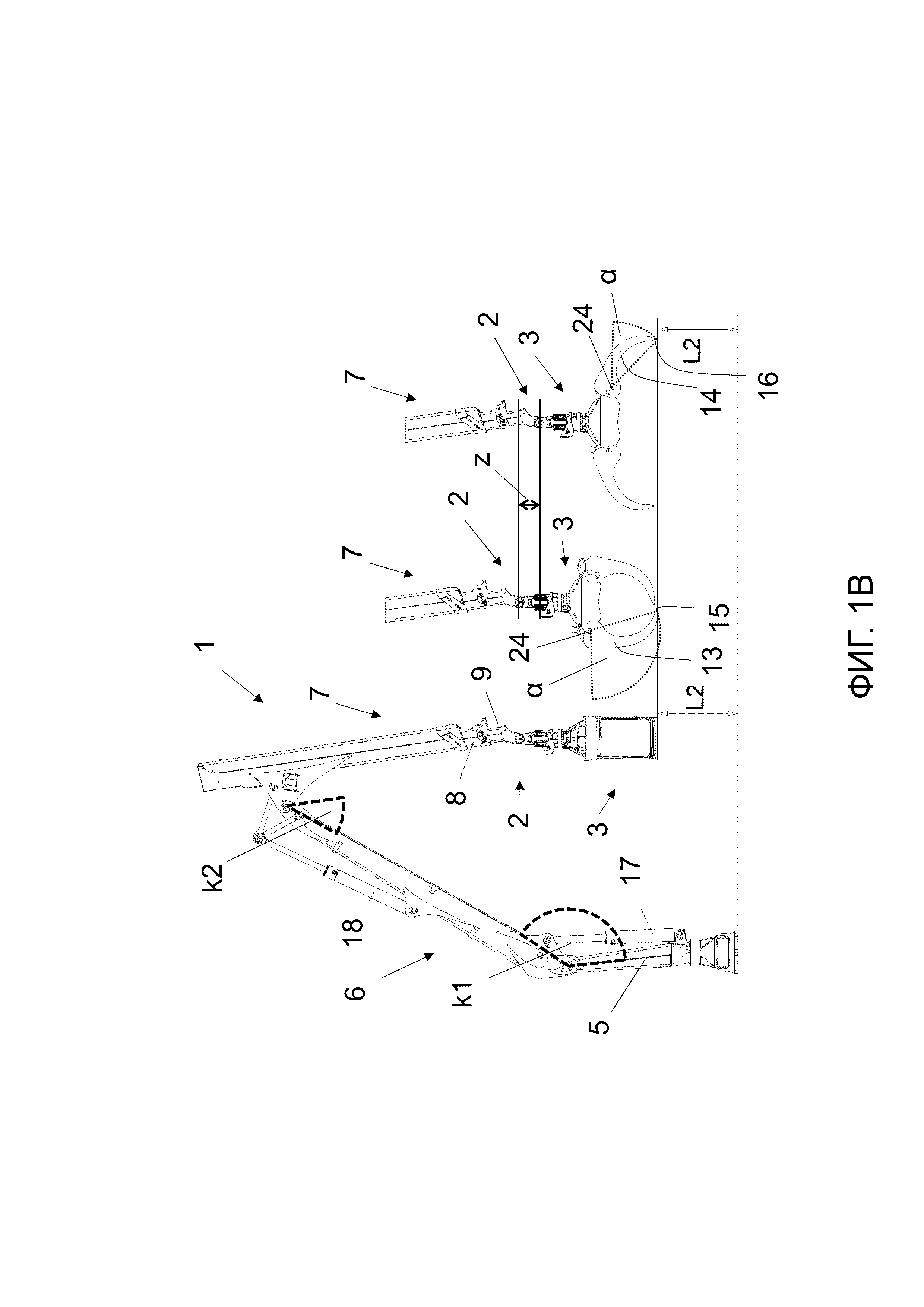
На фиг.1b показано аналогичное фиг.1a открытое, соответственно, закрытое положение выполненного в виде грейфера рабочего оборудования 3, причем здесь активирование рабочего оборудования 3 осуществляется в предлагаемом изобретением втором рабочем режиме управления крана. При движении крановой стрелы, здесь конкретно подъеме, соответственно, опускании концевой части 2 крана на изменяющуюся при закрытии, соответственно, открытии грейфера вертикальную компоненту положения грейферных зубьев 15, 16 по отношению, например, к нижней кромке мачты 5 крана, расстояние L2, соответственно, эффективное положение высоты грейферных зубьев 15, 16 может оставаться постоянным. При этом получается, как в закрытом положении, так и в открытом положении грейфера одинаковое расстояние L2 до нижней кромки мачты 5 крана. Вследствие такого, как изображено, по существу горизонтально проходящего ведения грейферных зубьев 15, 16 могут, например, предотвращаться повреждения крана 1, рабочего оборудования 3, при необходимости поднимаемого груза или основания, которое служит опорной поверхностью для крана 1 или поверхностью для укладывания при необходимости поднимаемого груза.
На фиг.2 показан второй вариант осуществления крана 1, при этом структурно и функционально похожие элементы крана 1 имеют такие же ссылочные обозначения, что и в варианте осуществления фиг.1a или, соответственно, 1b. Крановая стрела крана 1 включает в себя, как изображено в этом варианте осуществления, снова мачту 5 крана, подъемную стрелу 6 и шарнирно-сочлененную стрелу 7 вместе с ее выдвижными стрелами 8, 9.
На фиг.3a и 3b показаны виды сбоку ко второму варианту осуществления крана 1, и в каждом случае схематичное изображение управления 4 крана, имеющего сенсорику. Кран 1 имеет первый датчик d1 поворота для регистрации первого угла k1 шарнирного сочленения, второй датчик d2 поворота для регистрации второго угла k2 шарнирного сочленения, первый сенсор s1 выдвинутого положения для регистрации выдвинутого положения первой выдвижной стрелы 8 и второй сенсор s2 выдвинутого положения для регистрации выдвинутого положения второй выдвижной стрелы 9. Однако, в отличие от изображенного, регистрация первого угла k1 шарнирного сочленения и/или второго угла K2 шарнирного сочленения может также осуществляться путем регистрации длины выдвижения главного цилиндра 17, соответственно, путем регистрации длины выдвижения шарнирно-сочлененного цилиндра 18. Расположенное на кране и выполненное в виде грейфера рабочее оборудование 3 имеет третий датчик d3 поворота для регистрации угла α открытия. Однако регистрация угла α открытия может также осуществляться путем регистрации длины выдвижения гидравлического цилиндра (не изображено) для управления грейферными губками 13, 14. С помощью сенсорики, встроенной на кране и на рабочем оборудовании 3, может регистрироваться положение крана путем регистрации геометрии крана и открытого, соответственно, закрытого положения рабочего оборудования 3. В показанном варианте осуществления управление 4 крана имеет сигнальные входы 25 для подвода сенсорных сигналов через сигнальные линии сенсоров и сигнальные выходы 26 для подачи управляющих команд через управляющую линию 20. Для преобразования управляющих команд в соответствующие движения крановой стрелы крана 1, а также рабочего оборудования 3, он имеет клапанный блок 19, с помощью которого, например, посредством соответствующих управляющих команд может осуществляться управление гидравлическими клапанами для гидравлического питания гидравлических исполнительных устройств (таких как, например, главный цилиндр 17 и шарнирно-сочлененный цилиндр 18). Управление 4 крана имеет также память 10, вычислительный блок 12 и элементы 11 обслуживания, посредством которых пользователем могут вводиться управляющие команды для крана 1, соответственно, рабочего оборудования 3. Элементы 11 обслуживания могут быть расположены или иметься, например, также на мобильном беспроводном дистанционном управлении. Вычислительный блок 12 служит, например, для генерирования управляющих команд, при необходимости с использованием данных, записанных в памяти 10.
В показанном на фиг.3a положении крана 1, соответственно, рабочего оборудования 3 первый угол k1 шарнирного сочленения имеет зарегистрированное значение k11, второй угол k2 шарнирного сочленения зарегистрированное значение k21, выдвинутое положение первой выдвижной стрелы 8 зарегистрированное значение s11, выдвинутое положение второй выдвижной стрелы 9 зарегистрированное значение s21 и угол α открытия выполненного в виде грейфера рабочего оборудования 3 зарегистрированное значение α1. Однако в отличие от изображенного, регистрация выдвинутого положения первой выдвижной стрелы 8 и второй выдвижной стрелы 9, и вместе с тем регистрация эффективной длины шарнирно-сочлененной стрелы 7, может осуществляться с помощью общего или, соответственно, отдельного сенсора выдвинутого положения, как это, например, может быть предпочтительно при связанном движением варианте осуществления выдвижных стрел 8, 9 (например, с помощью не изображенной цепи). Соответствующие сенсорные сигналы могут подводиться к управлению 4 крана через сигнальные входы 25 и записываться в память 10, и включаться вычислительным блоком 12 в другие расчеты.
Итак, если во втором рабочем режиме управления 4 крана пользователем подается управляющая команда, например, при задействовании одного из элементов 11 обслуживания, для закрытия расположенного на концевой части 2 крана, выполненного в виде грейфера рабочего оборудования 2, то управлением 4 крана автоматически и без дополнительных действий пользователя для по меньшей мере частичной компенсации вертикальной компоненты движения грейферных губок 13, 14, соответственно, грейферных зубьев 15, 16 выполненного в виде грейфера рабочего оборудования 3, подаются дополнительные управляющие команды для движения крановой стрелы.
Вследствие дополнительных управляющих команд кран 1 находится теперь в положении, показанном на фиг.3b. В этом положении крана 1, соответственно, рабочего оборудования 3 первый угол k1 шарнирного сочленения имеет зарегистрированное значение k12, второй угол k2 шарнирного сочленения имеет зарегистрированное значение k22, выдвинутое положение первой выдвижной стрелы 8 зарегистрированное значение s12, выдвинутое положение второй выдвижной стрелы 9 зарегистрированное значение s22, и угол α открытия выполненного в виде грейфера рабочего оборудования 3 зарегистрированное значение α2. При этом изменение положений угла шарнирного сочленения, а также выдвинутых положений может быть осуществлено непрерывно и одновременно с изменением угла α открытия выполненного в виде грейфера рабочего оборудования 3.
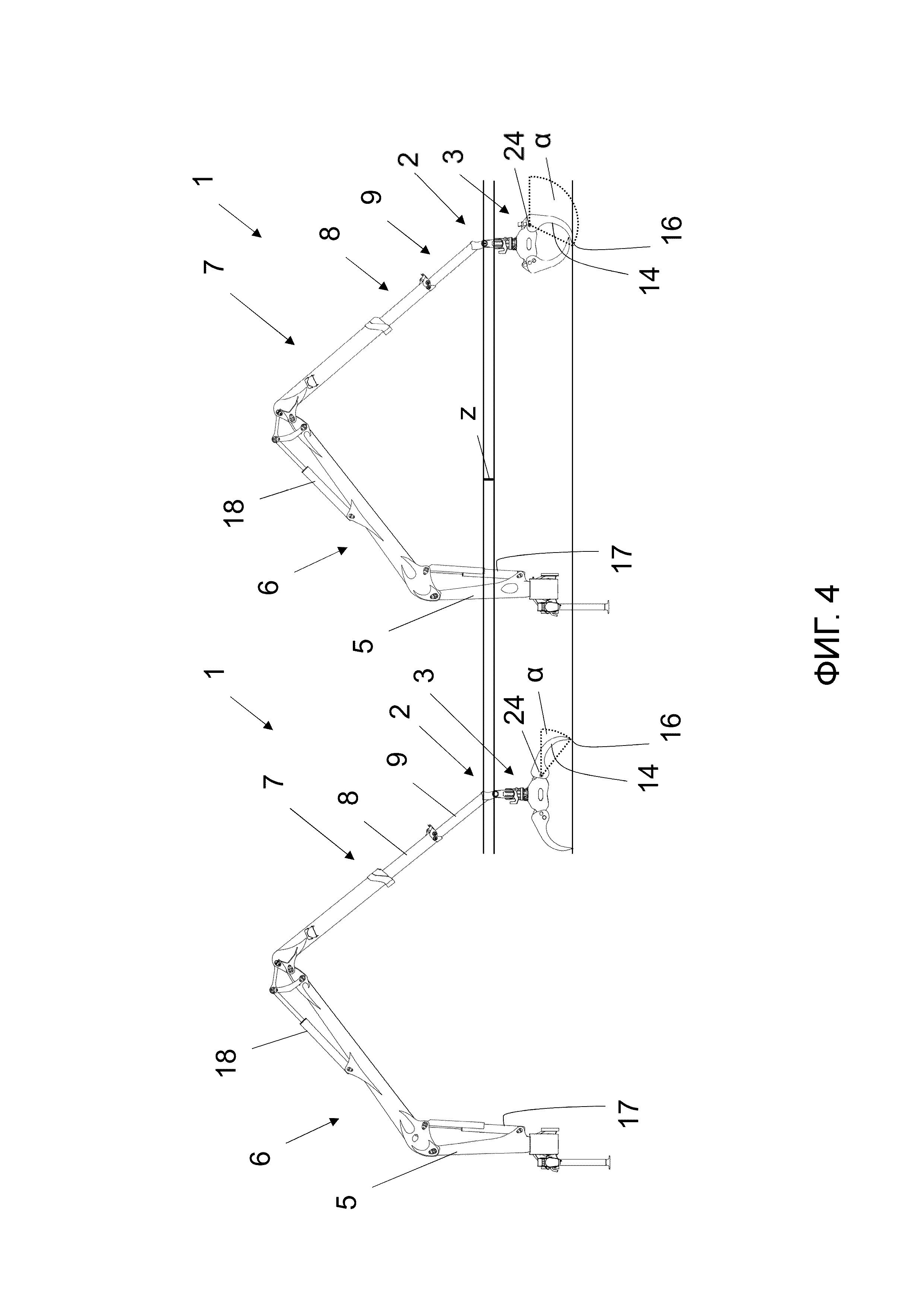
На фиг.4 изображены рядом друг с другом показанные на фиг.3a и 3b положения крана 1 или, соответственно, рабочего оборудования 3. При этом можно различить, что подаваемые во втором рабочем режиме управления 4 крана дополнительные управляющие команды при закрытии выполненного в виде грейфера рабочего оборудования 3 с вызванным этим изменением геометрии крановой стрелы эффективно привели к подъему концевой части 2 крана на вертикальную компоненту z. При этом грейферные зубья 15, 16 грейферных губок 14, 15 выполненного в виде грейфера рабочего оборудования 3 эффективно во время процесса закрытия оставались на одинаковой высоте, т.е. велись по существу горизонтально.
На фиг.5 показано противопоставление движения закрытия выполненного в виде грейфера рабочего оборудования 3 без компенсации вертикальной компоненты z, как это, например, происходило бы при активировании рабочего оборудования 3 в первом рабочем режиме управления 4 крана, и с компенсацией вертикальной компоненты z, как это, например, происходило бы при активировании рабочего оборудования 3 во втором рабочем режиме управления 4 крана. При этом в каждом случае изображено свободно висящее на концевой части 2 крана изображенной отдельными участками крановой стрелы, выполненное в виде грейфера рабочее оборудование 3, при этом находящееся в открытом положении рабочее оборудование 3 обозначено сплошными линиями, а находящийся в закрытом положении рабочее оборудование 3 обозначено штриховыми, соответственно, прерывистыми линиями. Отчетливо различимо, что при активировании рабочего оборудования 3 в первом рабочем режиме управления 4 крана вертикальное положение грейферных зубьев 15, 16 во время процесса закрытия изменяется на вертикальную компоненту z. При активировании рабочего оборудования 3 во втором рабочем режиме управления 4 крана путем подачи дополнительных управляющих команд для движения крановой стрелы может компенсироваться изменение вертикальной компоненты z. В показанном примере это осуществляется таким образом, что концевая часть 2 крана, как изображено, поднимается на соответствующую вертикальную компоненту z.
На фиг.6a и 6b показано наложение конечных положений крана 1 при движении закрытия, соответственно, открытия выполненного в виде грейфера, расположенного на концевой части 2 крана 1 рабочего оборудования 3 при активировании рабочего оборудования 3 во втором рабочем режиме управления 4 крана. При этом отчетливо различимо, что с помощью дополнительно подаваемых управляющих команд осуществляется движение и вместе с тем изменение геометрии крановой стрелы крана 1 для компенсации вертикальной компоненты z движения закрытия, соответственно, открытия грейфера.
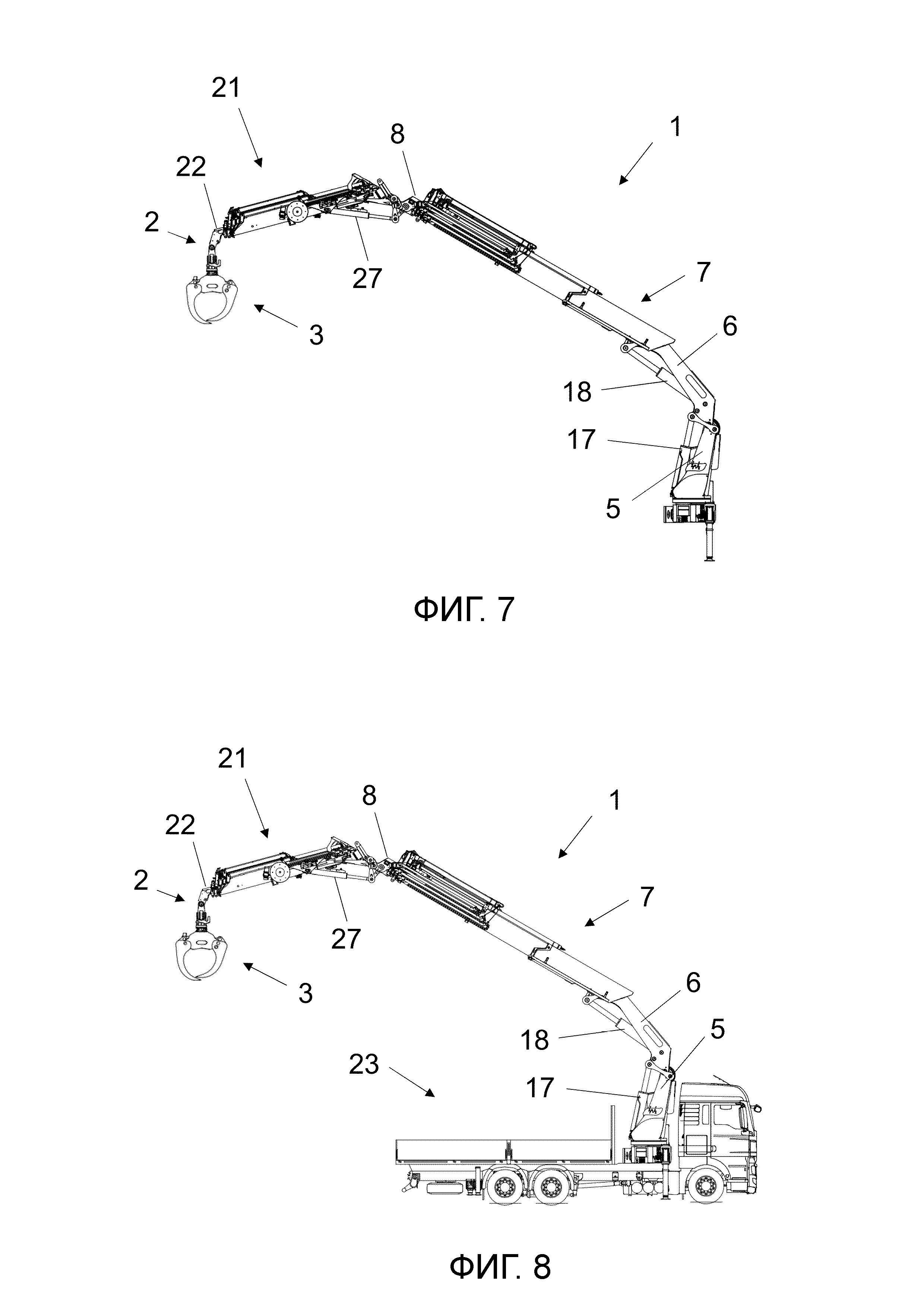
На фиг.7 и 8 показан третий вариант осуществления крана 1, а также транспортное средство 28, имеющее такой кран 1. Структурно и функционально похожие элементы крана 1 снабжены одинаковыми ссылочными обозначениями, как в рассмотренных выше вариантах осуществления. Крановая стрела крана 1 включает в себя, как изображено в этом варианте осуществления, мачту 5 крана, подъемную стрелу 6, шарнирно-сочлененную стрелу 7, имеющую по меньшей мере одну выдвижную стрелу 8, а также приставную шарнирно-сочлененную стрелу 21, имеющую по меньшей мере одну выдвижную стрелу 22. Для изменения положения шарнирного сочленения приставной шарнирно-сочлененной стрелы 21 относительно шарнирно-сочлененной стрелы 7 предусмотрен дополнительный шарнирно-сочлененный цилиндр 27.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Кран
2 Концевая часть крана
3 Рабочее оборудование
4 Управление крана
5 Мачта крана
6 Подъемная стрела
7 Шарнирно-сочлененная стрела
8 Выдвижная стрела
9 Выдвижная стрела
10 Память
11 Элементы обслуживания
12 Вычислительный блок
13 Грейферная губка
14 Грейферная губка
15 Грейферный зуб
16 Грейферный зуб
17 Главный цилиндр
18 Шарнирно-сочлененный цилиндр
19 Клапанный блок
20 Управляющая линия
21 Приставная шарнирно-сочлененная стрела
22 Выдвижная стрела
23 Транспортное средство
24 Место опоры
25 Сигнальные входы
26 Сигнальные выходы
27 Шарнирно-сочлененный цилиндр
k1 Угол шарнирного сочленения
k2 Угол шарнирного сочленения
α Угол открытия
L1 Расстояние
L2 Расстояние
z Разность
d1 Датчик поворота
d2 Датчик поворота
s1 Сенсор выдвинутого положения
s2 Сенсор выдвинутого положения
d3 Датчик поворота
k11, k12, k21, k22 Угол шарнирного сочленения
α1, α2 Угол открытия
Кран с преодолением мертвой точки
Шарнирная система
Кран
Кран
Кран
Z-образный собираемый кран
Привод вращения
Управляющее устройство крана
Управляющее устройство крана

