Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ РАННЕГО ОПОВЕЩЕНИЯ О СТОЛКНОВЕНИЯХ СЗАДИ НА ОСНОВЕ СВЯЗИ В ДИАПАЗОНЕ ВИДИМОГО СВЕТА
Вид РИД
Изобретение
Перекрестная ссылка на родственные заявки
[0001] Настоящая заявка притязает на приоритет заявки на патент (Китай) № 201510130071.8, озаглавленной "REAR-END COLLISION EARLY-WARNING SYSTEM AND METHOD BASED ON VISIBLE LIGHT COMMUNICATION", поданной 24 марта 2015 года в Государственное ведомство по интеллектуальной собственности Китайской Народной Республики, содержимое которой полностью включено в данный документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к технологии электронного управления автомобилями, и в частности, к системе и способу раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света.
Уровень техники
[0003] Авария вследствие столкновения сзади является самой характерной аварией из числа автомобильных аварий. В Китае, частота аварий вследствие столкновения сзади составляет одну треть от общей частоты дорожных аварий, что приводит к огромному количеству несчастных случаев и экономическим потерям. Чтобы уменьшать частоту аварий вследствие столкновения сзади и улучшать рабочие характеристики безопасности транспортных средств, система раннего оповещения о столкновениях сзади все более широко применяется к транспортному средству. Когда возникает потенциальный риск столкновения сзади, раннее оповещение о столкновениях сзади предоставляется в транспортное средство, чтобы упрощать принятие мер для водителя, таких как ускорение или руление, с тем чтобы предотвращать столкновения сзади или уменьшать травматизм.
[0004] Традиционная система раннего оповещения о столкновениях сзади, в общем, представляет собой систему раннего оповещения о столкновениях сзади на основе радара. Таким образом, радар устанавливается в задней части транспортного средства, и приближающееся сзади транспортное средство, которое быстро приближается к транспортному средству в идентичной полосе движения, обнаруживается посредством радара. Как показано на фиг. 4, в процессе приведения в движение, система продолжает обнаруживать расстояние между транспортным средством и другим транспортным средством, которое приближается к транспортному средству и находится непосредственно позади транспортного средства, и продолжает определение того, существует или нет опасность столкновения сзади. В случае, если время до столкновения (ТТС) приближающегося сзади транспортного средства, которое быстро приближается к транспортному средству в идентичной полосе движения, меньше порогового значения времени, система передает раннее оповещение о столкновениях сзади, т.е. натягивает ремень безопасности или подсвечивает индикаторную лампу раннего оповещения.
[0005] Тем не менее, система раннего оповещения о столкновениях сзади на основе радара имеет следующие недостатки.
[0006] (1) Приближающееся транспортное средство может представлять собой легковой автомобиль или грузовик и т.д. Динамические характеристики, такие как продольное ускорение, тормозные характеристики и характеристики руления различных типов приближающихся транспортных средств отличаются, и ТТС-ситуации должны калиброваться по-разному. Тем не менее, система раннего оповещения о столкновениях сзади на основе радара приспосабливает способ активного обнаружения, может обнаруживать только информацию о расстоянии и информацию о скорости приближающегося сзади транспортного средства, но не может получать дополнительную информацию относительно приближающегося сзади транспортного средства. Следовательно, подходящее пороговое значение ТТС и подходящее время подачи аварийного сигнала не могут задаваться динамически на основе типа, приближающегося сзади транспортного средства.
[0007] (2) Система раннего оповещения о столкновениях сзади на основе радара может обнаруживать только транспортные средства непосредственно позади транспортного средства. Следует обратиться к фиг. 4. В случае изгиба дороги, транспортное средство 12 в смежной полосе движения обнаруживается посредством радарной волны 13 транспортного средства 10, и в силу этого аварийный сигнал может формироваться относительно транспортного средства в смежной полосе движения по ошибке. Не смотря на это, движущееся сзади транспортное средство 11 в идентичной полосе движения с транспортным средством 10 не может обнаруживаться посредством радарной волны 13 транспортного средства 10, и в силу этого существует ложноотрицательное суждение в отношении потенциального столкновения сзади.
Раскрытие изобретения
[0008] Цель настоящего изобретения заключается в том, чтобы предоставлять систему и способ раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света. Приближающееся сзади транспортное средство передает информацию в движущееся впереди транспортное средство посредством приспособления активного способа, чтобы упрощать для движущегося впереди транспортного средства получение дополнительной информации о состоянии приближающегося сзади транспортного средства, что обеспечивает точность раннего оповещения о столкновениях сзади движущегося впереди транспортного средства. Помимо этого, соответствующее пороговое значение ТТС выбирается для раннего оповещения о столкновениях сзади движущегося впереди транспортного средства на основе типа приближающегося сзади транспортного средства, чтобы точнее выполнять определение.
[0009] Предусмотрена система раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению. Система включает в себя модуль позиционирования, MCU, модуль модуляции в оптической связи, светодиодную лампу, фоточувствительное приемное устройство и НМI-систему.
[0010] Модуль позиционирования сконфигурирован с возможностью получать информацию о позиции, информацию о курсе и информацию об ориентации при приведении в движение рассматриваемого транспортного средства и передавать ее в MCU. Модуль позиционирования соединяется с MCU.
[0011] MCU сконфигурирован с возможностью получать состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства из шины рассматриваемого транспортного средства, вычислять хронологическую траекторию на основе информации о позиции рассматриваемого транспортного средства и передавать хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства в модуль модуляции в оптической связи. Модуль модуляции в оптической связи соединяется с MCU.
[0012] Модуль модуляции в оптической связи сконфигурирован с возможностью модулировать хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства и приводить в действие светодиодную лампу таким образом, что она мигает. Светодиодная лампа соединяется с модулем модуляции в оптической связи.
[0013] Светодиодная лампа монтируется в головной части транспортного средства и сконфигурирована с возможностью формировать оптический сигнал, включающий в себя хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства для рассматриваемого транспортного средства, и передавать оптический сигнал.
[0014] Фоточувствительное приемное устройство монтируется в хвостовой части транспортного средства и сконфигурировано с возможностью принимать оптический сигнал, включающий в себя хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства, передаваемый посредством светодиодной лампы приближающегося сзади транспортного средства, регулировать и демодулировать принимаемый оптический сигнал и передавать оптический сигнал в MCU. Фоточувствительное приемное устройство соединяется с MCU.
[0015] MCU сконфигурирован с возможностью вычислять прогнозный маршрут рассматриваемого транспортного средства на основе информации о позиции, информации о курсе и информации об ориентации при приведении в движение рассматриваемого транспортного средства и определять то, находится или нет рассматриваемое транспортное средство в идентичной полосе движения с приближающимся сзади транспортным средством, на основе информации о позиции и прогнозного маршрута рассматриваемого транспортного средства и на основе информации о позиции и хронологической траектории приближающегося сзади транспортного средства. В случае, если рассматриваемое транспортное средство находится в идентичной полосе движения с приближающимся сзади транспортным средством, MCU сконфигурирован с возможностью вычислять ТТС (а именно, время до столкновения) между рассматриваемым транспортным средством и приближающимся сзади транспортным средством на основе расстояния и относительной скорости между двумя транспортными средствами, вычислять значение максимального замедления, выбираемое для приближающегося сзади транспортного средства, на основе информации о типе транспортного средства и состояния нагрузки приближающегося сзади транспортного средства и выбирать пороговое значение ТТС на основе значения максимального замедления. В случае, если ТТС меньше порогового значения ТТС в течение периода времени задержки, превышающего предварительно установленное пороговое значение времени, MCU сконфигурирован с возможностью выводить раннее оповещение в НМI-систему рассматриваемого транспортного средства (т.е. в систему с человеко-машинным интерфейсом), чтобы выполнять раннее оповещение водителя. HMI-система соединяется с MCU.
[0016] Светодиодная лампа представляет собой светодиодную лампу дневных ходовых огней или светодиодную лампу головного света.
[0017] Предусмотрен способ раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению. Система раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света устанавливается как в движущемся впереди транспортном средстве, так и в приближающемся сзади транспортном средстве. Способ включает в себя этап 1 и этап 2.
[0018] На этапе 1, в процессе приведения в движение, модуль позиционирования приближающегося сзади транспортного средства, получает информацию о позиции приближающегося сзади транспортного средства, и MCU приближающегося сзади транспортного средства вычисляет хронологическую траекторию приближающегося сзади транспортного средства на основе информации о позиции приближающегося сзади транспортного средства. MCU приближающегося сзади транспортного средства получает состояние приведения в движение и состояние нагрузки приближающегося сзади транспортного средства из шины транспортного средства и передает информацию о позиции, хронологическую траекторию, состояние приведения в движение, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства в модуль модуляции в оптической связи приближающегося сзади транспортного средства. Модуль модуляции в оптической связи кодирует информацию и приводит в действие светодиодную лампу дневных ходовых огней или светодиодную лампу головного света приближающегося сзади транспортного средства таким образом, что она мигает и формирует оптический сигнал, включающий в себя информацию о позиции, хронологическую траекторию, состояние приведения в движение, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства, и передает оптический сигнал.
[0019] На этапе 2, при приеме оптического сигнала, передаваемого посредством приближающегося сзади транспортного средства, фоточувствительное приемное устройство движущегося впереди транспортного средства регулирует и демодулирует принимаемый оптический сигнал. MCU движущегося впереди транспортного средства вычисляет прогнозный маршрут движущегося впереди транспортного средства на основе информации о позиции, информации о курсе и информации об ориентации при приведении в движение движущегося впереди транспортного средства и определяет то, находится или нет движущееся впереди транспортное средство в идентичной полосе движения с приближающимся сзади транспортным средством, на основе информации о позиции и прогнозного маршрута движущегося впереди транспортного средства и на основе информации о позиции и хронологической траектории приближающегося сзади транспортного средства. В случае, если движущееся впереди транспортное средство находится в идентичной полосе движения с приближающимся сзади транспортным средством, MCU вычисляет ТТС между движущимся впереди транспортным средством и приближающимся сзади транспортным средством на основе расстояния и, относительной скорости между двумя транспортными средствами и вычисляет значение максимального замедления, выбираемое для приближающегося сзади транспортного средства, на основе информации о типе транспортного средства и состояния нагрузки приближающегося сзади транспортного средства. MCU выбирает пороговое значение ТТС на основе значения максимального замедления. В случае, если ТТС меньше порогового значения ТТС в течение периода времени задержки, превышающего предварительно установленное пороговое значение времени, MCU выводит раннее оповещение в HMI-систему движущегося впереди транспортного средства, чтобы выполнять раннее оповещение водителя движущегося впереди транспортного средства.
[0020] Приближающееся сзади транспортное средство содержит систему адаптивных ламп головного света. Таким образом, светодиодная лампа головного света может адаптивно регулировать направление согласно изгибу.
[0021] Настоящее изобретение имеет следующие преимущества.
[0022] (1) Приближающееся сзади транспортное средство передает информацию в движущееся впереди транспортное средство активным способом, чтобы упрощать для движущегося впереди транспортного средства получение дополнительной информации о состоянии приближающегося сзади транспортного средства, что обеспечивает точность раннего оповещения о столкновениях сзади движущегося впереди транспортного средства.
[0023] (2) Наиболее подходящее пороговое значение ТТС выбирается для раннего оповещения о столкновениях сзади движущегося впереди транспортного средства на основе типа приближающегося сзади транспортного средства, чтобы выполнять определение более точное.
[0024] (3) В настоящем изобретении определяется, находится или нет приближающееся сзади транспортное средство в идентичной полосе движения с движущимся впереди транспортным средством, посредством сравнения хронологической траектории приближающегося сзади транспортного средства с прогнозным маршрутом движущегося впереди транспортного средства, что является в равной степени применимым в случае, если транспортное средство движется по изгибу. Следовательно, не возникает неправильная информация, вызываемая посредством транспортных средств, проезжающих через изгиб.
[0025] (4) Система комбинируется с системой AFS (адаптивных ламп головного света). Поскольку светодиодная лампа головного света может адаптивно регулироваться согласно изгибу, и информация относительно приближающегося сзади транспортного средства также может передаваться в движущееся впереди транспортное средство на изгибе, за счет этого уменьшая ложноотрицательные суждения в отношении столкновений сзади на изгибе.
[0026] (5) Система комбинируется с системой освещения (светодиодной лампой дневных ходовых огней или светодиодной лампой головного света) транспортного средства, что не влияет на нормальный режим работы системы освещения и уменьшает затраты вследствие установки радара в традиционной системе раннего оповещения о столкновениях сзади.
Краткое описание чертежей
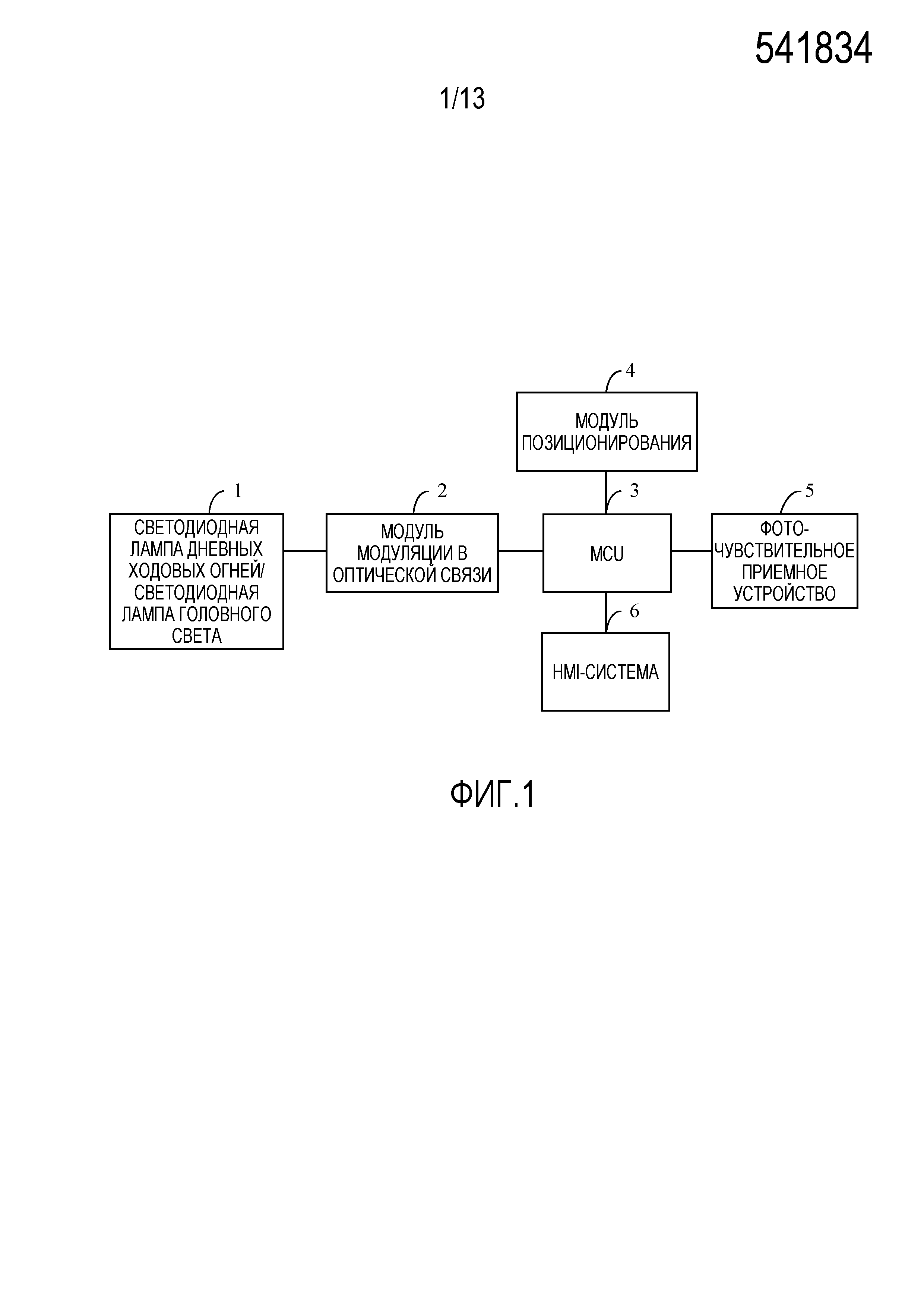
[0027] Фиг. 1 является структурной блок-схемой системы раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению;
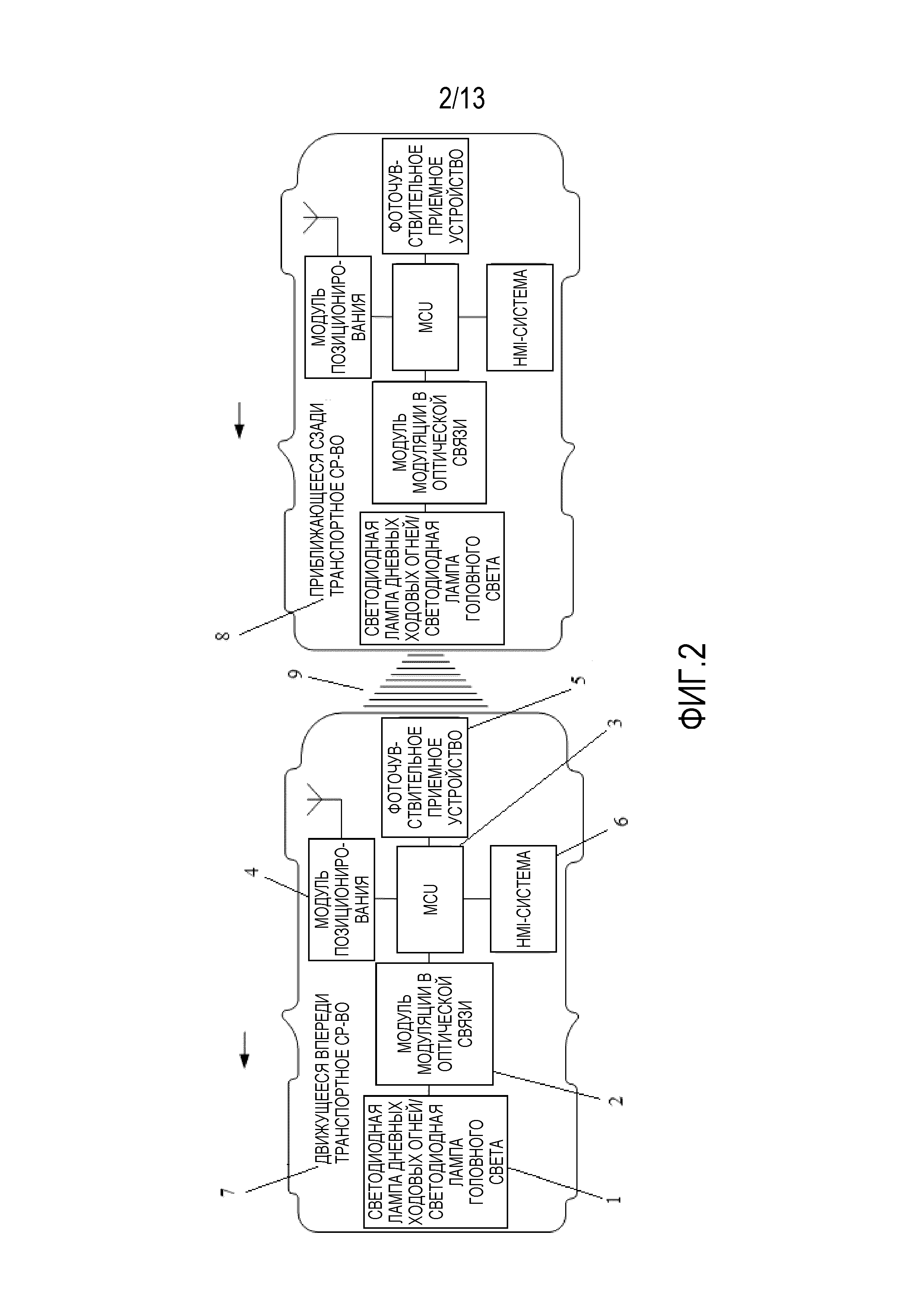
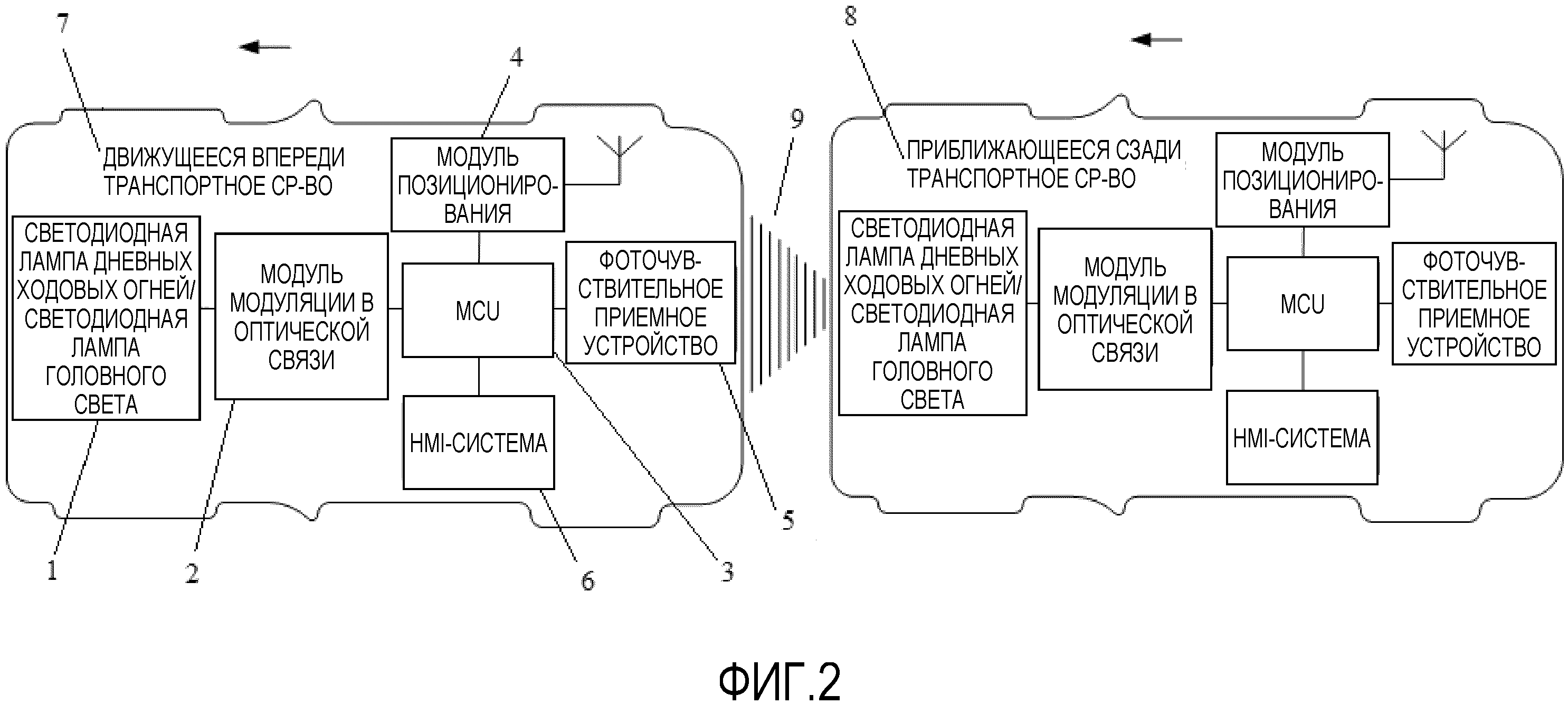
[0028] Фиг. 2 является блок-схемой использования способа раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению;
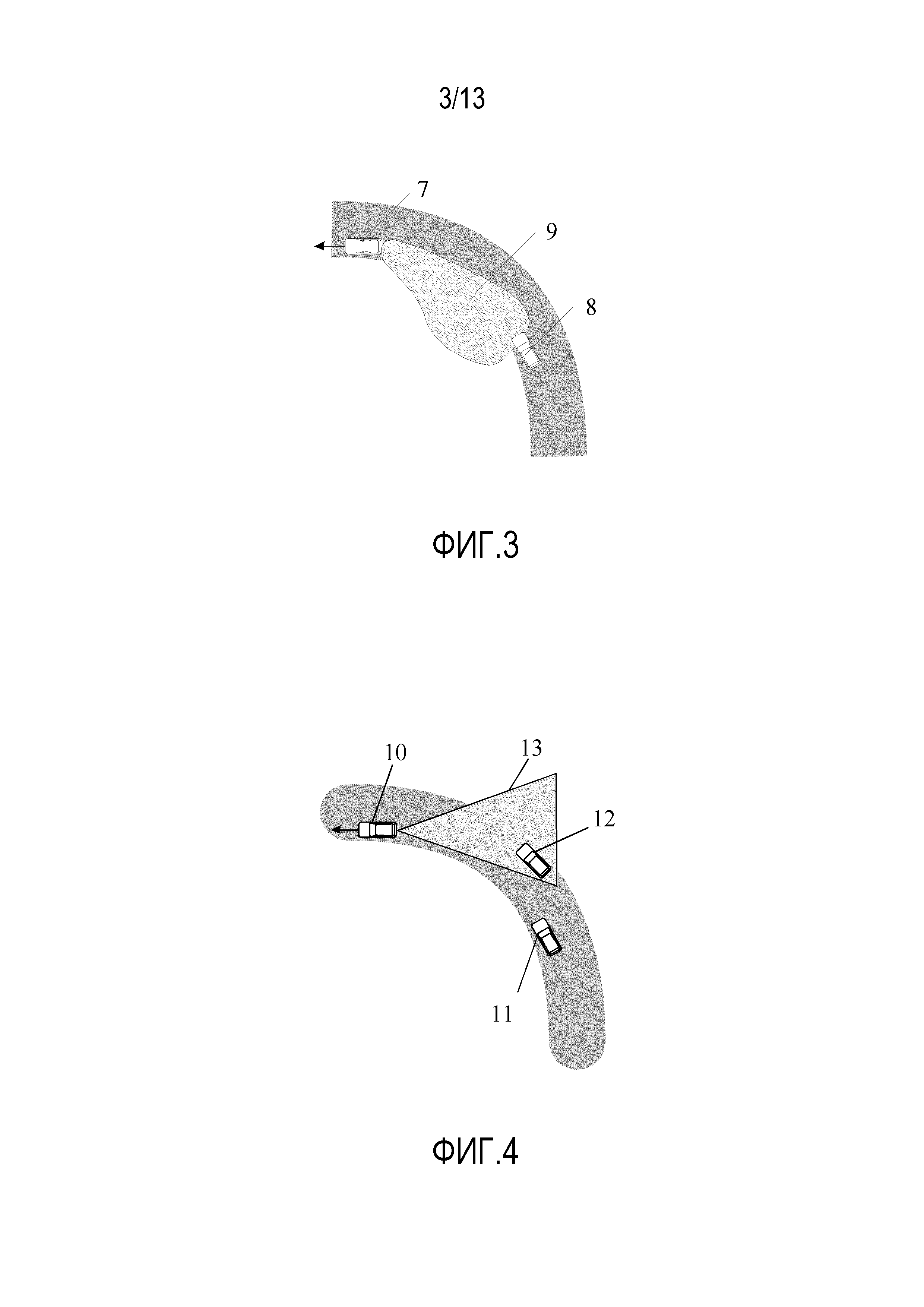
[0029] Фиг. 3 является схемой состояний использования способа раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению;
[0030] Фиг. 4 является схемой состояний использования традиционной технологии;
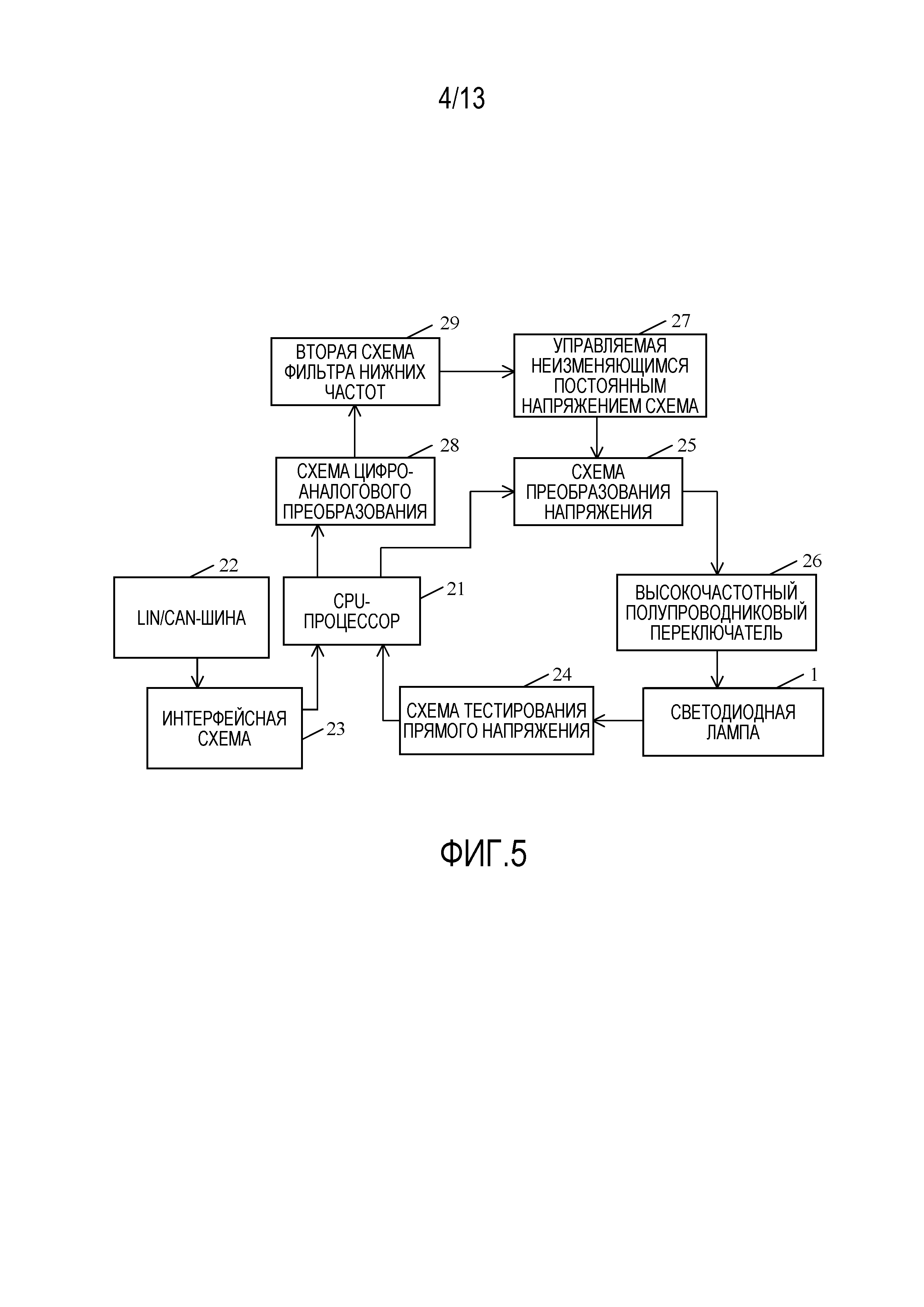
[0031] Фиг. 5 является структурной блок-схемой модуля модуляции в оптической связи согласно настоящему изобретению;
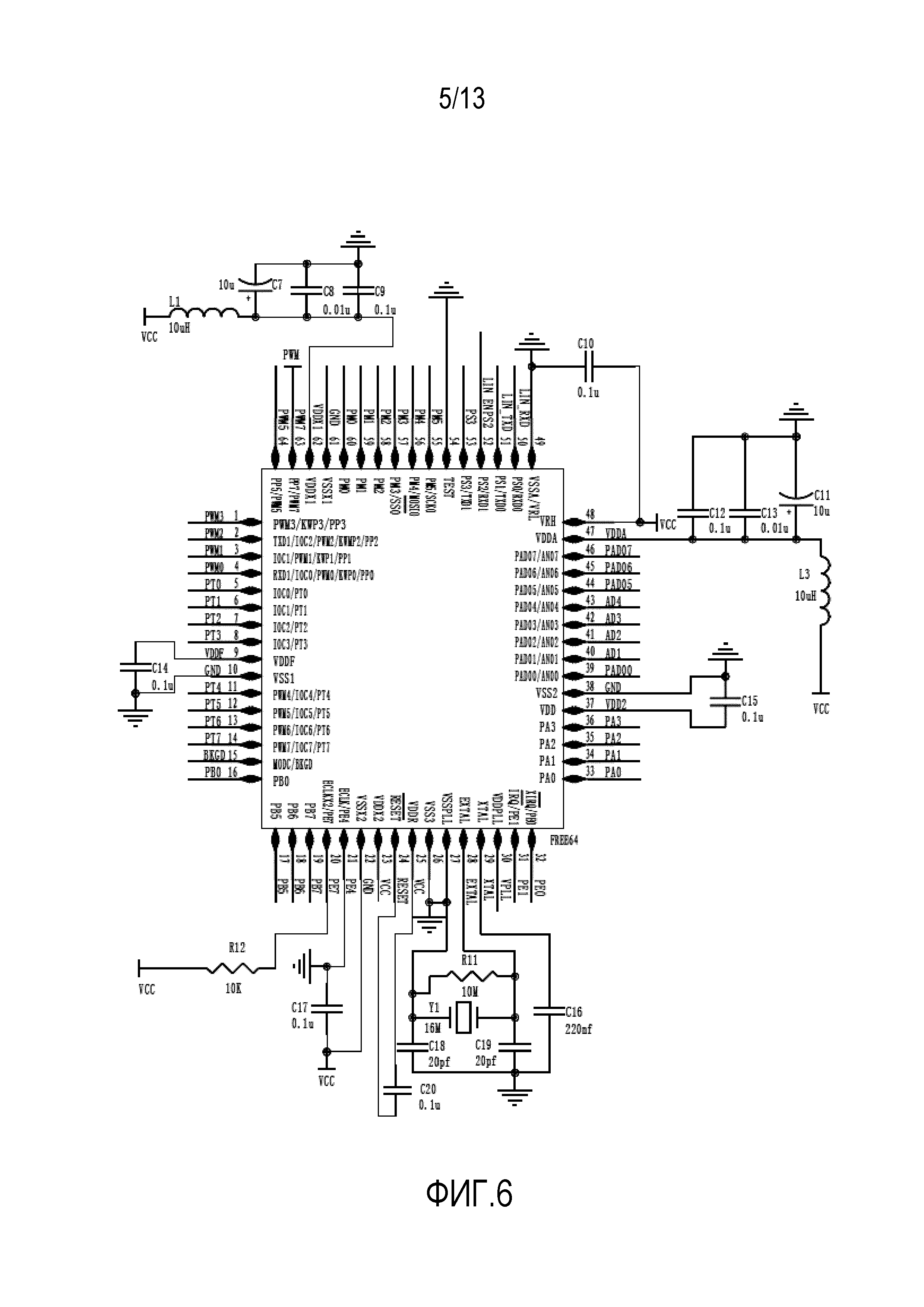
[0032] Фиг. 6 является структурной схемой штырьковых выводов CPU-процессора на фиг. 5;
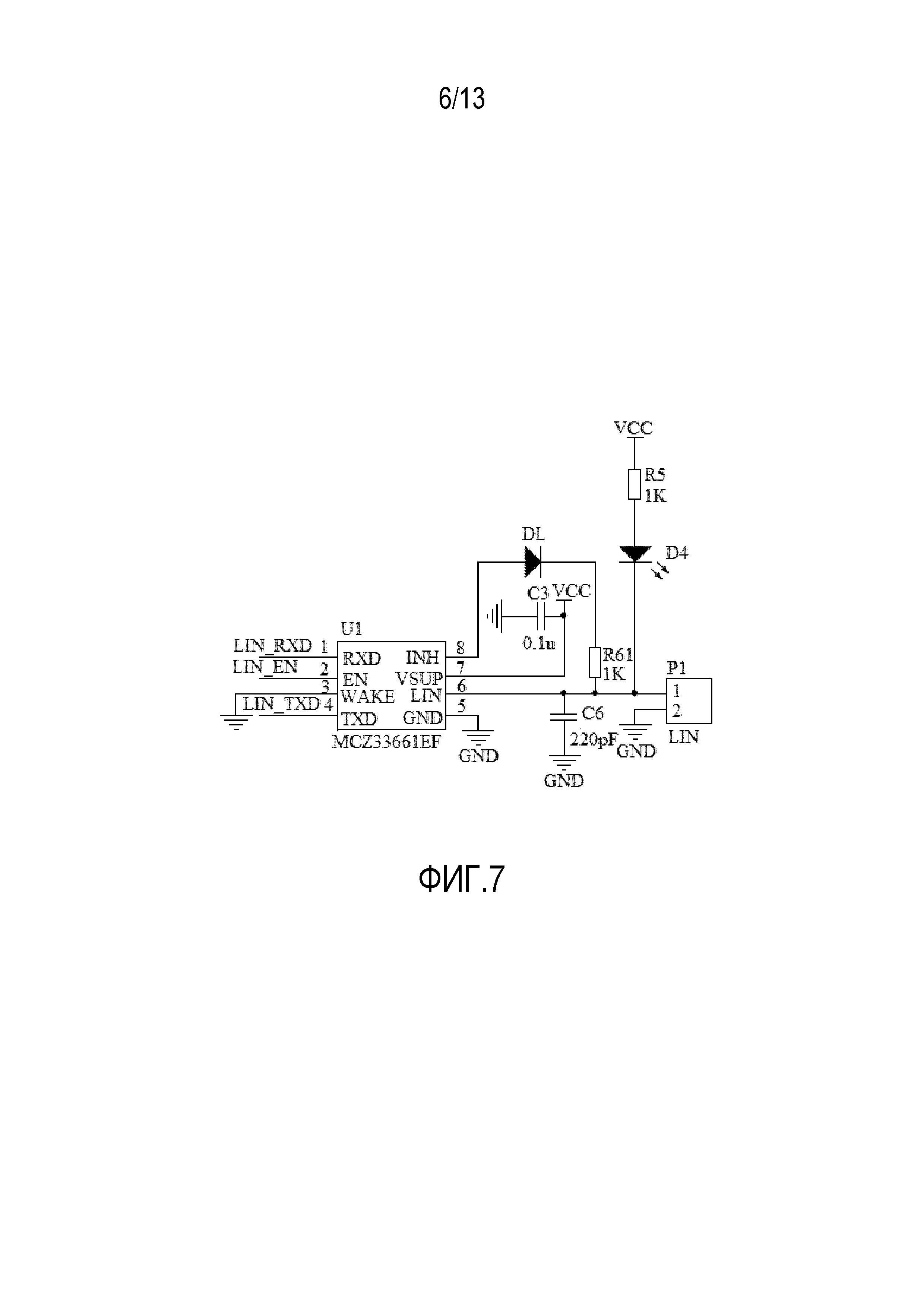
[0033] Фиг. 7 является принципиальной схемой соединения между CPU-процессором и автомобильной LIN-шиной на фиг. 5;
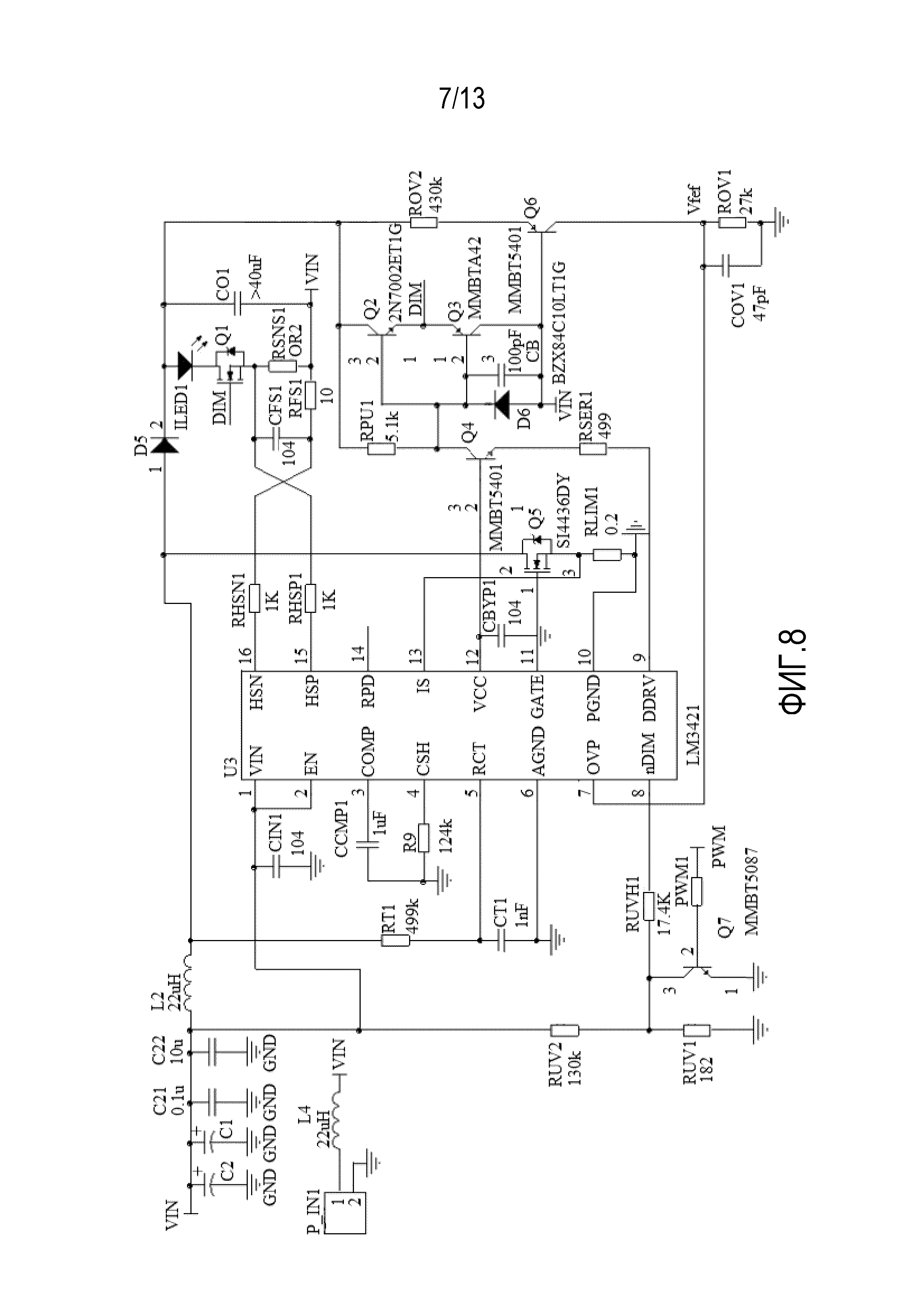
[0034] Фиг. 8 является структурной схемой для схемы преобразования напряжения на фиг. 5;
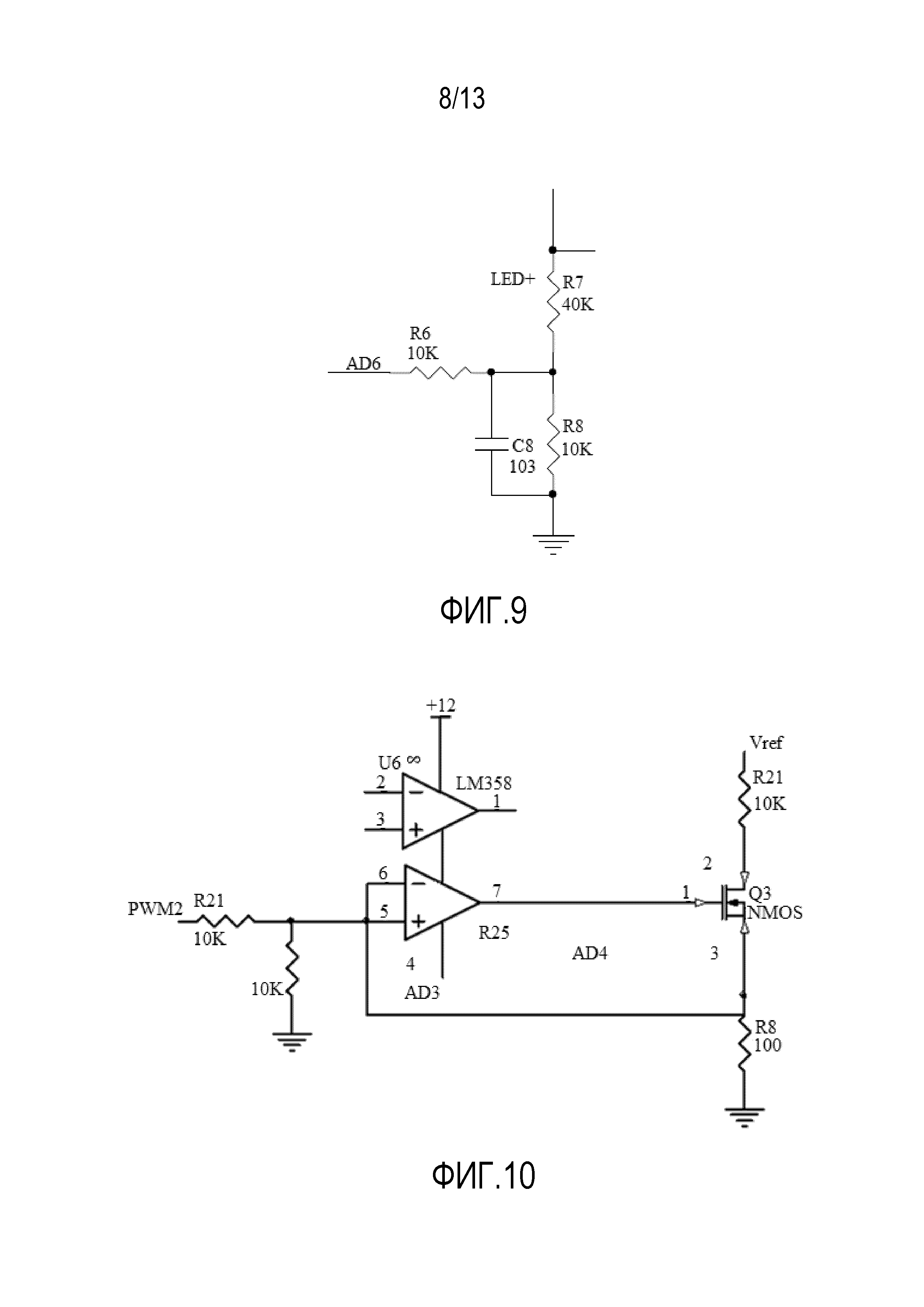
[0035] Фиг. 9 является структурной схемой для схемы тестирования прямого напряжения на фиг. 5;
[0036] Фиг. 10 является структурной схемой для управляемой неизменяющимся постоянным напряжением схемы на фиг. 5;
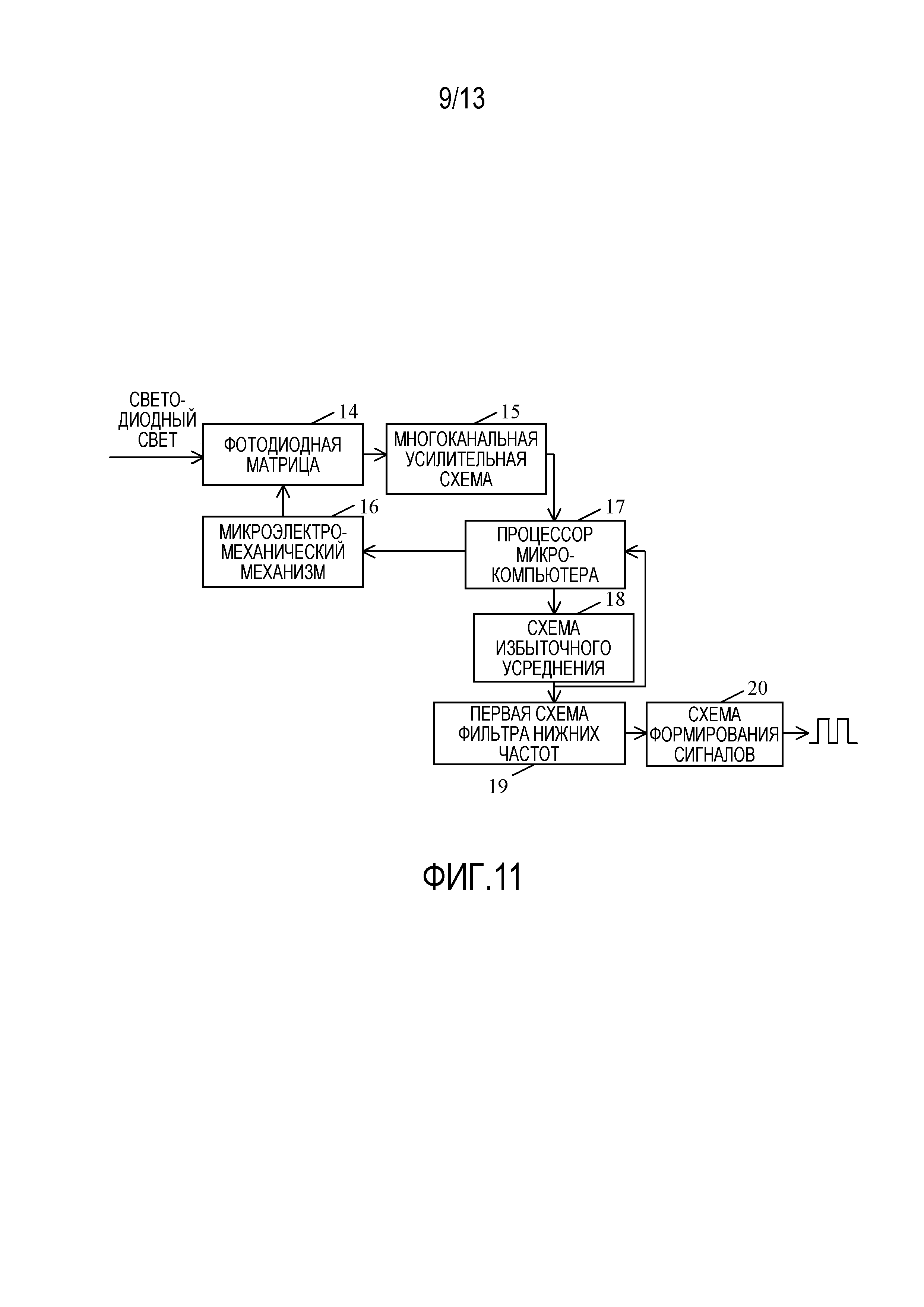
[0037] Фиг. 11 является структурной блок-схемой фоточувствительного приемного устройства согласно настоящему изобретению;
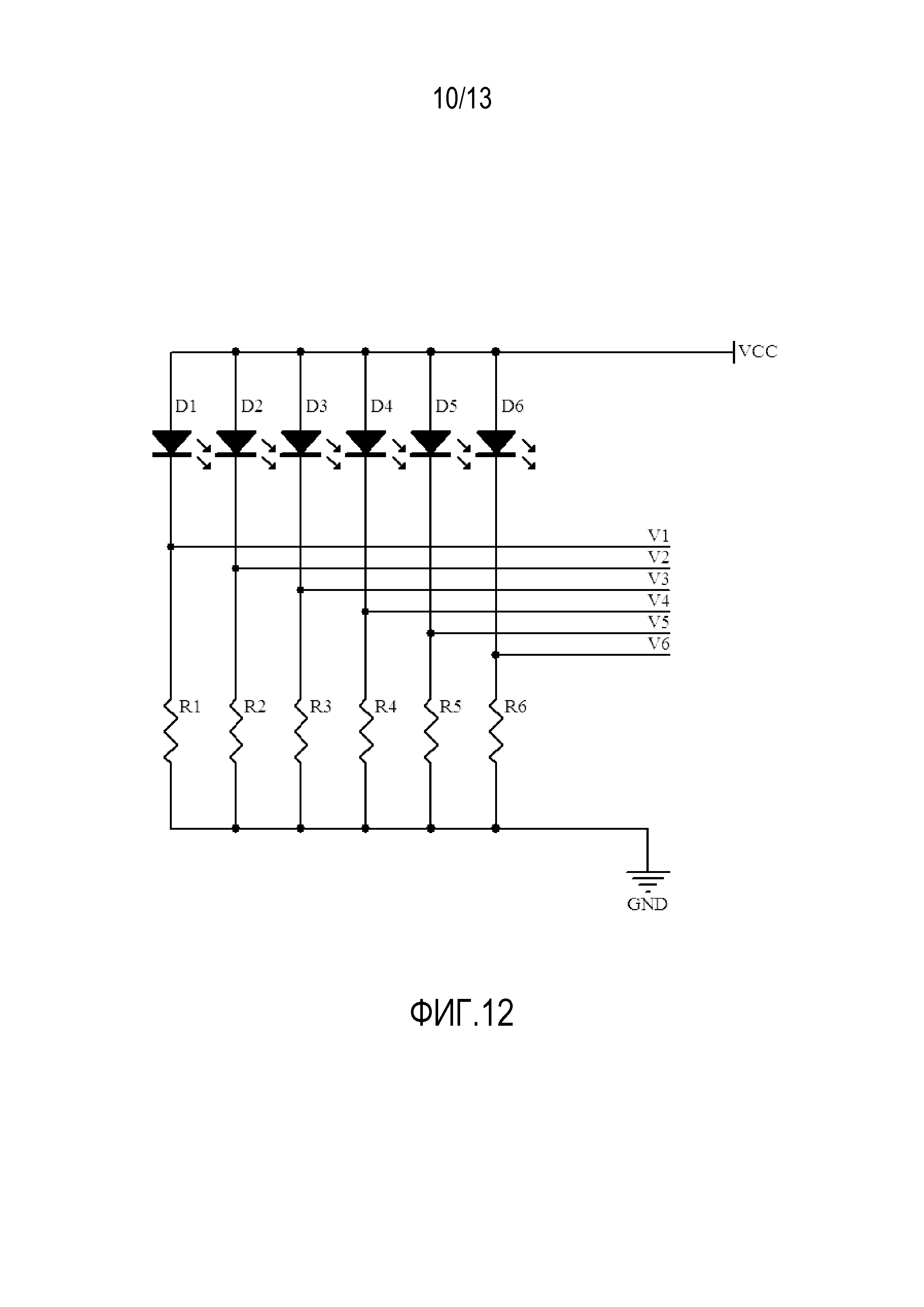
[0038] Фиг. 12 является принципиальной схемой для схемы фотоэлектрического преобразования на фиг. 11;
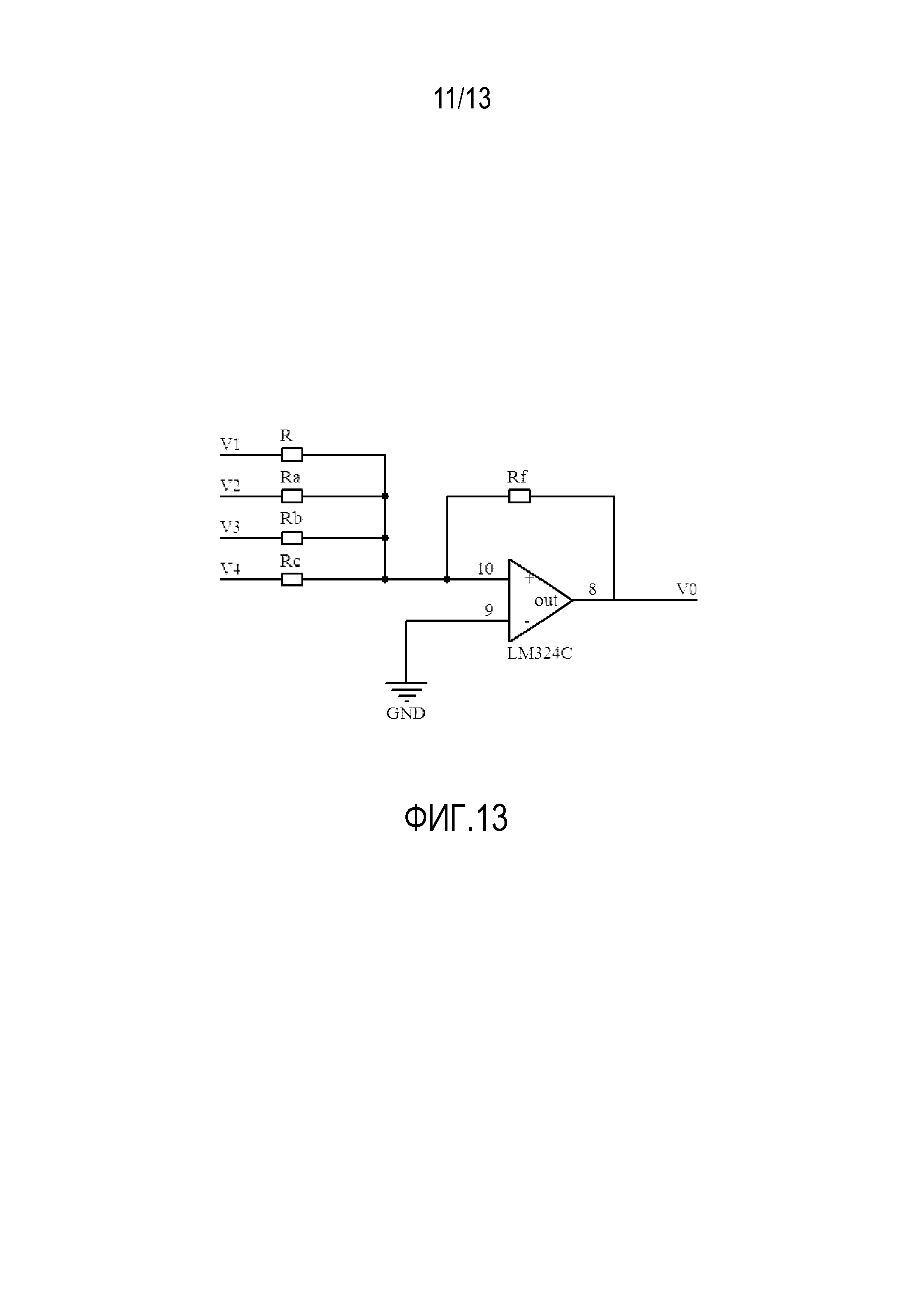
[0039] Фиг. 13 является принципиальной схемой для схемы избыточного усреднения на фиг. 11;
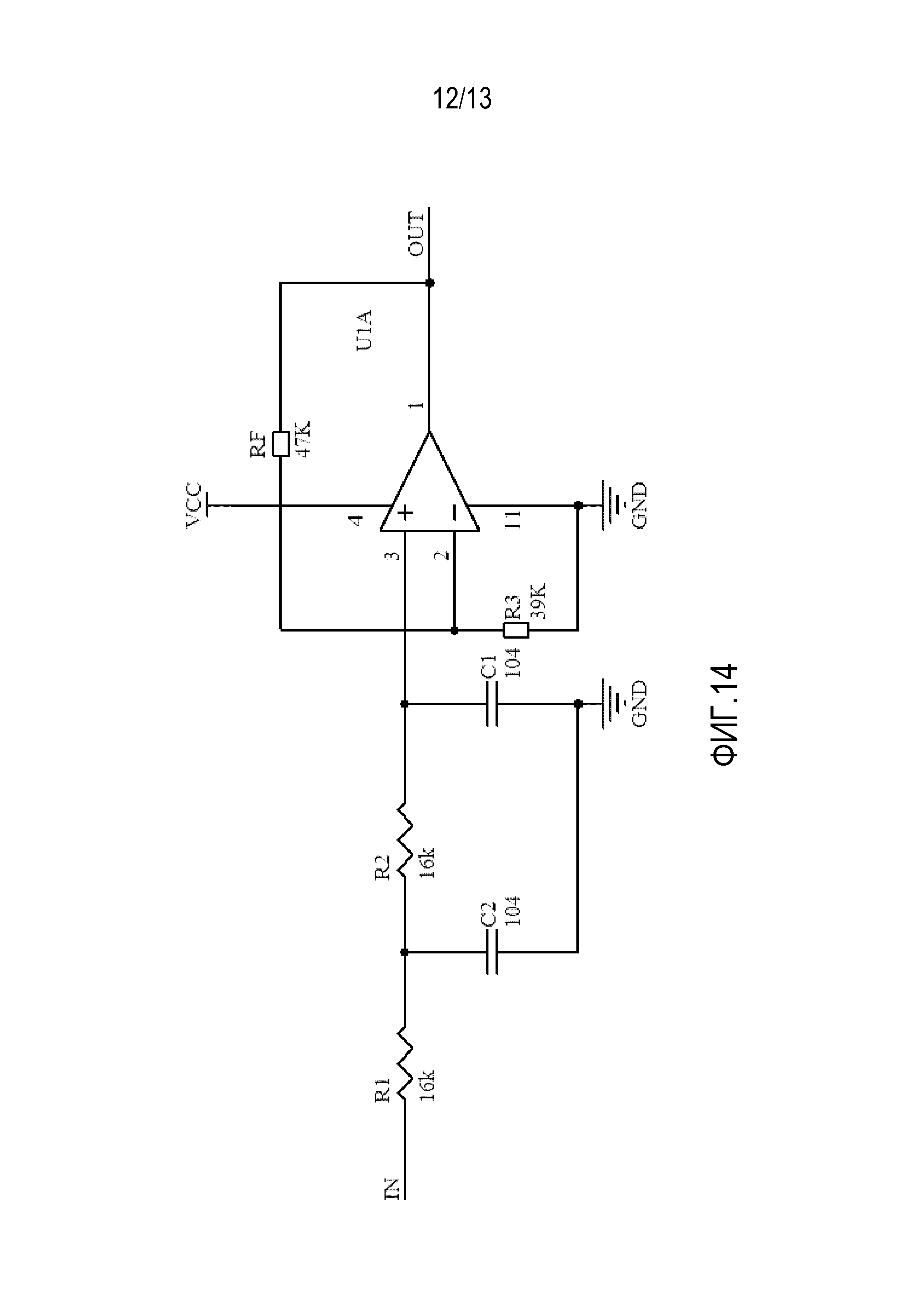
[0040] Фиг. 14 является принципиальной схемой для схемы фильтра нижних частот на фиг. 11; и
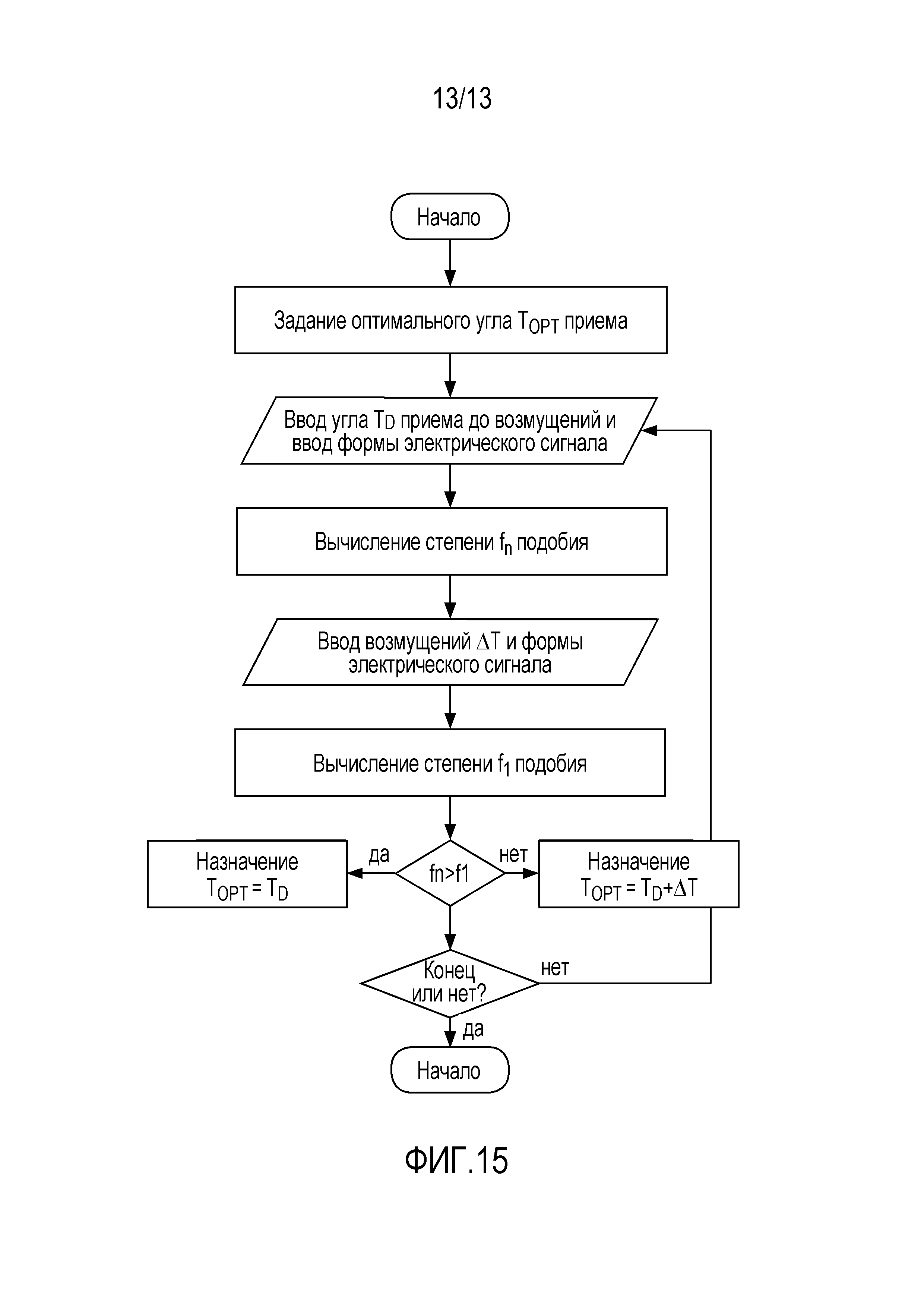
[0041] Фиг. 15 является блок-схемой последовательности операций способа для процесса для процессора микрокомпьютера, чтобы вычислять оптимальный пространственный угол приема согласно настоящему изобретению.
[0042] Каждая из стрелок на фиг. 2, фиг. 3 и фиг. 4 указывает направление движения транспортного средства.
Осуществление изобретения
[0043] В дальнейшем подробно описывается настоящее изобретение в сочетании с чертежами.
[0044] Следует обратиться к фиг. 1. Предусмотрена система раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению. Система включает в себя модуль 4 позиционирования, MCU 3 (т.е. микроконтроллер), модуль 2 модуляции в оптической связи, светодиодную лампу 1, фоточувствительное приемное устройство 5 и HMI-систему 6 (к примеру, приборную панель, зуммер на приборной панели и ремень безопасности). Светодиодная лампа 1 реализуется как лампа дневных ходовых огней.
[0045] Модуль 4 позиционирования состоит из спутниковой системы позиционирования и гироскопа. Модуль 4 позиционирования сконфигурирован с возможностью получать информацию о позиции, информацию о курсе и информацию об ориентации при приведении в движение рассматриваемого транспортного средства и передавать ее в MCU 3, и модуль 4 позиционирования соединяется с MCU 3.
[0046] MCU 3 сконфигурирован с возможностью получать состояние приведения в движение транспортного средства (к примеру, скорость и состояние торможения), состояние нагрузки и информацию о типе транспортного средства (к. примеру, большегрузный самосвал, легкий грузовик, автобус, микроавтобус и легковой автомобиль, что сохраняется в контроллере транспортного средства) из шины рассматриваемого транспортного средства, вычисляет хронологическую траекторию на основе информации о позиции рассматриваемого транспортного средства и передает хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства в модуль 2 модуляции в оптической связи. Модуль 2 модуляции в оптической связи соединяется с MCU 3.
[0047] Модуль 2 модуляции в оптической связи сконфигурирован с возможностью модулировать хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки, и информацию о типе транспортного средства и приводить в действие светодиодную лампу дневных ходовых огней таким образом, что она мигает на высокой частоте, с тем чтобы формировать оптический сигнал 9. Светодиодная лампа дневных ходовых огней соединяется с модулем 2 модуляции в оптической связи.
[0048] Светодиодная лампа дневных ходовых огней монтируется в головной части транспортного средства и сконфигурирована с возможностью формировать оптический сигнал 9, включающий в себя хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства для рассматриваемого транспортного средства, и передавать оптический сигнал.
[0049] Фоточувствительное приемное устройство 5 монтируется в хвостовой части транспортного средства и сконфигурировано с возможностью принимать оптический сигнал 9, включающий в себя хронологическую траекторию, состояние приведения в движение транспортного средства, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства 8, передаваемый посредством светодиодной лампы, дневных ходовых огней приближающегося сзади транспортного средства 8, регулировать и демодулировать принимаемый оптический сигнал 9 и передавать оптический сигнал в MCU 3. Фоточувствительное приемное устройство 5 соединяется с MCU 3.
[0050] MCU 3 сконфигурирован с возможностью вычислять прогнозный маршрут рассматриваемого транспортного средства на основе информации о позиции, информации о курсе и информации об ориентации при приведении в движение рассматриваемого транспортного средства и определять то, находится или нет рассматриваемое транспортное средство в идентичной полосе движения с приближающимся сзади транспортным средством 8, на основе информации о позиции и прогнозного маршрута рассматриваемого транспортного средства и на основе информации о позиции и хронологической траектории приближающегося сзади транспортного средства 8. В случае, если рассматриваемое транспортное средство находится в идентичной полосе движения с приближающимся сзади транспортным средством 8, MCU 3 сконфигурирован с возможностью вычислять ТТС (а именно, время до столкновения) между рассматриваемым транспортным средством и приближающимся сзади транспортным средством 8 на основе расстояния и относительной скорости между двумя транспортными средствами, вычислять значение максимального замедления, выбираемое для приближающегося сзади транспортного средства 8, на основе информации о типе транспортного средства и состояния нагрузки приближающегося сзади транспортного средства 8 и выбирать пороговое значение ТТС на основе значения максимального замедления. В случае, если ТТС меньше порогового значения ТТС в течение периода времени задержки, превышающего предварительно установленное пороговое значение времени, MCU 3 сконфигурирован с возможностью выводить раннее оповещение в HMI-систему б рассматриваемого транспортного средства, чтобы выполнять раннее оповещение водителя. HMI-система 6 соединяется с MCU 3.
[0051] В системе раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению, светодиодная лампа 1 альтернативно может представлять собой светодиодную лампу головного света.
[0052] Следует обратиться к фиг. 2 и фиг. 3, которые показывают способ раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света согласно настоящему изобретению. Система раннего оповещения о столкновениях сзади на основе связи в диапазоне видимого света устанавливается как в движущемся впереди транспортном средстве 7, так и в приближающемся сзади транспортном средстве 8, и, по меньшей мере, приближающееся сзади транспортное средство 8 содержит систему AFS (адаптивных ламп головного света). Способ включает в себя этап 1 и этап 2.
[0053] На этапе 1, в процессе приведения в движение, модуль 4 позиционирования приближающегося сзади транспортного средства 8 получает информацию о позиции приближающегося сзади транспортного средства 8, и MCU 3 приближающегося сзади транспортного средства 8 вычисляет хронологическую траекторию приближающегося сзади транспортного средства 8 на основе информации о позиции приближающегося сзади транспортного средства 8. MCU 3 приближающегося сзади транспортного средства 8 получает состояние приведения в движение и состояние нагрузки приближающегося сзади транспортного средства 8 из шины транспортного средства и передает информацию о позиции, хронологическую траекторию, состояние приведения в движение, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства 8 в модуль 2 модуляции в оптической связи приближающегося сзади транспортного средства 8. Модуль 2 модуляции в оптической связи кодирует информацию и приводит в действие светодиодную лампу дневных ходовых огней или светодиодную лампу головного света приближающегося сзади транспортного средства 8 таким образом, что она мигает и формирует оптический сигнал 9, включающий в себя информацию о позиции, хронологическую траекторию, состояние приведения в движение, состояние нагрузки и информацию о типе транспортного средства для приближающегося сзади транспортного средства 8, и передает оптический сигнал.
[0054] На этапе 2, при приеме оптического сигнала 9, передаваемого посредством приближающегося сзади транспортного средства 8, фоточувствительное приемное устройство 5 движущегося впереди транспортного средства 7 модулирует и демодулирует принимаемый оптический сигнал 9. MCU 3 движущегося впереди транспортного средства 7 вычисляет прогнозный маршрут движущегося впереди транспортного средства 7 на основе информации о позиции, информации о курсе и информации об ориентации при приведении в движение движущегося впереди транспортного средства 7 и определяет то, находится или нет движущееся впереди транспортное средство 7 в идентичной полосе движения с приближающимся сзади транспортным средством 8, в комбинации с информацией о позиции и прогнозным маршрутом движущегося впереди транспортного средства 7 и в комбинации с информацией о позиции и хронологической траекторией приближающегося сзади транспортного средства 8. В случае, если движущееся впереди транспортное средство 7 находится в идентичной полосе движения с приближающимся сзади транспортным средством 8, MCU 3 вычисляет ТТС между движущимся впереди транспортным средством 7 и приближающимся сзади транспортным средством 8 на основе расстояния и относительной скорости между двумя транспортными средствами и вычисляет значение максимального замедления, выбираемое для приближающегося сзади транспортного средства 8, на основе информации о типе транспортного средства и состояния нагрузки приближающегося сзади транспортного средства 8. MCU 3 выбирает пороговое значение ТТС на основе значения максимального замедления. В случае, если ТТС меньше порогового значения ТТС в течение периода времени задержки, превышающего предварительно установленное пороговое значение времени, MCU 3 выводит раннее оповещение в HMI-систему 6 движущегося впереди транспортного средства 7. HMI-система 6 приводит в действие прибор движущегося впереди транспортного средства 7 таким образом, что он выполняет предупреждение в форме изображения, приводит в действие зуммер таким образом, что он выдает звуковой аварийный сигнал, и приводит в действие ремень безопасности таким образом, что он вибрирует, за счет этого выполняя раннее оповещение водителя движущегося впереди транспортного средства 7.
[0055] Следует обратиться к фиг. 3. В настоящем изобретении определяется, находится или нет приближающееся сзади транспортное средство в идентичной полосе движения с движущимся впереди транспортным средством, посредством сравнения хронологической траектории приближающегося сзади транспортного средства 8 с прогнозным маршрутом движущегося впереди транспортного средства 7, что является в равной степени применимым в случае, если транспортное средство движется по изгибу. Следовательно, не возникает неправильная информация, вызываемая посредством транспортных средств, проезжающих через изгиб.
[0056] Следует обратиться к фиг. 3. Приближающееся сзади транспортное средство 8 содержит систему адаптивных ламп головного света. Таким образом, светодиодная лампа головного света может адаптивно регулировать направление согласно изгибу, и на изгибе, информация относительно приближающегося сзади транспортного средства 8 может передаваться в движущееся впереди транспортное средство 7, за счет этого уменьшая ложноотрицательные суждения в отношении столкновений сзади на изгибе.
[0057] Модуль 2 модуляции в оптической связи в настоящем изобретении реализуется с использованием традиционной технологии, например, передающего устройства для приведения в действие светодиодной автомобильной лампы на основе оптической связи, раскрытого в изобретении, номер заявки которого представляет собой 2014205836509. На фиг. 5 показано передающее устройство, которое включает в себя CPU-процессор 21, выполняющий роль обработки данных, управления и вывода, и схему 25 преобразования напряжения, сконфигурированную с возможностью предоставлять ток приведения в действие в светодиодную лампу 1. CPU-процессор 21 (модуль 2 модуляции в оптической связи может не использовать CPU-процессор отдельно и может выполнять управление и обработку данных посредством MCU 3 в системе раннего оповещения о столкновениях сзади) функционально соединяется с LIN/CAN-шиной 22 транспортного средства через интерфейсную схему 23, чтобы получать информационный контент оптической связи. Схема 25 преобразования напряжения модулирует передаваемые данные, передаваемые посредством CPU-процессора 21, в ток освещения в форме высокого уровня и низкого уровня. Высокочастотный полупроводниковый переключатель 26, приводимый в действие посредством схемы 25 преобразования напряжения, представляет собой устройство для модуляции формы сигнала тока.
[0058] Светодиодная лампа 1 содержит схему 24 тестирования прямого напряжения, сконфигурированную с возможностью измерять падение прямого напряжения. Выходной контактный вывод схемы 24 тестирования прямого напряжения соединяется с CPU-процессором 21. CPU-процессор 21 вычисляет температуру перехода светодиодной лампы 1 на основе падения прямого напряжения и температурного коэффициента и выводит цифровой опорный уровень из выходного контактного вывода уровня в комбинации с передаваемыми данными. Выходной контактный вывод уровня CPU-процессора 21 соединяется со схемой 28 цифро-аналогового преобразования, второй схемой 29 фильтра нижних частот и управляемой неизменяющимся постоянным напряжением схемой 27 в перечисленной последовательности и преобразует опорный уровень в аналоговую величину. Выходной контактный вывод управляемой неизменяющимся постоянным напряжением схемы 27 соединяется с контактным выводом опорного напряжения схемы 25 преобразования напряжения, чтобы выполнять линейную операцию "AND". Выходной ток схемы 25 преобразования напряжения определяется посредством опорного напряжения, т.е. высокий уровень и низкий уровень формы сигнала тока, кодированной посредством передаваемых данных, определяются посредством опорного напряжения после того, как CPU-процессор 21 выполняет нечеткое классификационное решение для температуры перехода и передаваемых данных.
[0059] В качестве конкретной схемы реализации, CPU-процессор 21 представляет собой 16-битовый однокристальный микрокомпьютер типа MC9S12XS128 компании Freescale. Номера контактных выводов, соответствующие штырьковым выводам однокристального микрокомпьютера, показаны на фиг 6. Штырьковые выводы 50-52 однокристального микрокомпьютера (которые представляют собой LIN-RXD, LIN-TXD и LIN-EN) соединяются с LIN-шиной транспортного средства через формирователь сигналов управления LIN-шины, тип которого представляет собой МС33661. Как показано на фиг. 7, штырьковый вывод 45 однокристального микрокомпьютера (т.е. контактный вывод PAD06) представляет собой входной контактный вывод прямого напряжения, и конфигурация других штырьковых выводов ссылается на фиг. 6.
[0060] Схема 25 преобразования напряжения включает в себя светодиодный контроллер приведения в действие, тип которого представляет собой LM3421. Конфигурация штырьковых выводов LM3421 показана на фиг 8. Штырьковый вывод 8 LM3421 (т.е. контактный вывод nDIM) соединяется со штырьковым выводом 63 (т.е. контактным выводом PWM7) однокристального микрокомпьютера через триод Q7. Штырьковый вывод 7 (т.е. контактный вывод OVP) LM3421 представляет собой контактный вывод опорного напряжения. Штырьковый вывод 12 (т.е. контактный вывод VCC) LM3421 соединяется с базой NPN-триода Q4. Штырьковый вывод 9 (т.е. контактный вывод DDRV) LM3421 соединяется с эмиттером триода Q4, и коллектор триода Q4, соответственно, соединяется с базами NPN-триода Q2 и PNP-триода Q3. Коллектор триода Q2 соединяется с базовым резистором, эмиттер триода Q2 соединяется с эмиттером триода Q3, и коллектор триода Q3 соединяется с базой PNP-триода Q6, также соединяется с напряжением питания и соединяется с базой через диод. Эмиттер триода Q6 соединяется с резистором коллектора триода Q2, и коллектор триода Q6 соединяется со штырьковым выводом 7 (т.е. контактным выводом OVP) LM3421 и заземляется через резистор.
[0061] Чтобы не допускать анормального режима работы импульсного источника питания, так что функция освещения отключается, что вызывается посредством несходимости, возникающей в процессе управления схемы 25 преобразования напряжения, высокочастотный полупроводниковый переключатель 26, сконфигурированный с возможностью модулировать переменную прямоугольную волну, включает в себя транзистор Ql с высокой подвижностью электронов на основе GaN, частота переключения которого меньше одной десятой рабочей частоты импульсного источника питания. Чтобы не допускать визуального искажения рабочих характеристик, рабочая частота Ql предпочтительно больше 200 Гц. G-злектрод Ql соединяется с эмиттером Q2, и диод D5 на основе GaN соединяется между D-электродом Ql и штырьковым выводом 1 (контактным выводом рабочего напряжения) LM3421. Первый резистор RSNS1 соединяется с S-электродом Ql. Конец первого резистора RSNS1, соединенный с S-электродом Ql, соединяется с резистором штырькового вывода 15 (т.е. контактным выводом HSP) LM3421, и другой конец первого резистора RSNS1 соединяется со штырьковым выводом 16 (т.е. контактным выводом HSN) LM3421 и напряжения питания. Отрицательный электрод диода D5 соединяется с коллектором Q2, и ILED1 представляющий светодиодную лампу 1, соединяется между отрицательным электродом диода D5 и коллектором Q2. Схема 24 тестирования прямого напряжения сконфигурирована с возможностью тестировать падение прямого напряжения светодиодной лампы 1. CPU-процессор 21 вычисляет температуру перехода на основе падения прямого напряжения и температурного коэффициента, схемная структура чего показана на фиг 9. Как показано на фиг. 10, управляемая неизменяющимся постоянным напряжением схема 27 состоит из операционного усилителя LM358 и полевого транзистора и осуществляет линейную операцию "AND" с опорным напряжением Vref схемы 25 преобразования напряжения. Схема 28 цифро-аналогового преобразования и вторая схема 29 фильтра нижних частот реализуется посредством использования традиционного модуля, который не описывается избыточно в данном документе.
[0062] Способ приведения в действие светодиодной автомобильной лампы на основе оптической связи раскрыт в настоящем изобретении следующим образом. CPU-процессор 21 передает передаваемые данные в схему 25 преобразования напряжения в форме кадра данных для модуляции. Схема 25 преобразования напряжения модулирует передаваемые данные в постоянный ток освещения в форме высокого уровня и низкого уровня. CPU-процессор 21 предоставляет во времени опорное напряжение в схему 25 преобразования напряжения на основе температуры перехода светодиодной лампы 1 в комбинации с параметром приведения в движение и передаваемыми данными LIN/CAN-шины 22 транспортного средства. Схема 25 преобразования - напряжения регулирует высокий, уровень и низкий уровень формы сигнала тока, соответствующей передаваемым данным, на основе опорного напряжения. В качестве факторов, которые затрагивают эффект связи, должны рассматриваться такие факторы, как расстояние между двумя транспортными средствами и интерференция окружающего света. Светоотдача освещения светодиодной лампы 1 находится под влиянием таких факторов, как температура перехода и ток приведения в действие. В случае, если светодиодная лампа 1 работает при предварительно определенной яркости освещения, передаваемые данные должны модулироваться в ток освещения. Передаваемые данные имеют форму высокого уровня и низкого уровня, и высокий уровень может уменьшать светоотдачу светодиодной лампы 1. Следовательно, в случае, если оба транспортных средства имеют хороший эффект приема связи, разность между высоким уровнем и низким уровнем формы сигнала тока уменьшается, так что ток принудительно имеет тенденцию представлять собой постоянный ток освещения, что позволяет увеличивать светоотдачу.
[0063] Температура перехода светодиодной лампы 1 оказывает прямое влияние на ее ресурс и надежность. Чтобы уменьшать температуру перехода, средний ток, протекающий через светодиодную лампу 1, уменьшается при обеспечении возможности светодиодной лампы 1 работать при предписанной яркости освещения. Температура перехода светодиодной лампы 1 вычисляется из падения прямого напряжения и температурного коэффициента.
Динамический регулирующий контур опорного уровня формируется посредством оценки температуры перехода в качестве значения обратной связи в реальном времени, чтобы достигать управляемого регулирования тока, который приводит в действие светодиодную лампу 1 таким образом, что она работает. Динамическое регулирование температуры перехода независимо от того, есть или нет связь, может обеспечивать ресурс светодиодной лампы 1. Температура перехода светодиодной лампы 1 измеряется и вычисляется посредством схемы 24 тестирования прямого напряжения, как описано выше.
[0064] В дополнение к регулированию тока, CPU-процессор 21 регулирует частоту формы сигнала тока, соответствующей передаваемым данным, в сочетании с параметром трафика и передаваемыми данными LIN/CAN-шины 22 транспортного средства, чтобы увеличивать скорость передачи передаваемых данных и сокращать время отклика для связи транспортного средства. Передаваемые данные комбинируются и кодируются посредством не менее двух прямоугольных сигналов различных частот  в форме потока двоичных данных, за исключением светодиодной лампы 1 без связи. Чтобы не затрагивать нормальную функцию фотографирования, каждая из различных частот fi больше 1 кГц и меньше одной десятой частоты переключения мощности схемы 25 преобразования напряжения. С учетом влияния сложного распространения света на коэффициент битовых ошибок частотной демодуляции в приемной стороне, любая относительная разность частот в прямоугольном сигнале больше 1%, и относительная разность частот между смежными частотами не меньше 5%. Относительная разность частот задается как
в форме потока двоичных данных, за исключением светодиодной лампы 1 без связи. Чтобы не затрагивать нормальную функцию фотографирования, каждая из различных частот fi больше 1 кГц и меньше одной десятой частоты переключения мощности схемы 25 преобразования напряжения. С учетом влияния сложного распространения света на коэффициент битовых ошибок частотной демодуляции в приемной стороне, любая относительная разность частот в прямоугольном сигнале больше 1%, и относительная разность частот между смежными частотами не меньше 5%. Относительная разность частот задается как  , где fi и fj представляют две различных частоты прямоугольной волны тока кодирования.
, где fi и fj представляют две различных частоты прямоугольной волны тока кодирования.
[0065] Высокий уровень и низкий уровень формы сигнала тока, соответствующей передаваемым данным, взвешиваются на основе нечеткого классификационного индекса. Взвешивание на основе нечеткого классификационного индекса подробно описывается следующим образом.
[0066] В случае, если температура Tjn перехода светодиодной лампы 1 больше пороговой температуры Tth, уровень формы I(k) сигнала тока в текущее время tk затухает на основе экспоненциального весового коэффициента, чтобы получать уровень формы I(k+1) сигнала тока в следующее время, что представляет собой  , где
, где  . В этом первичном состоянии, предусмотрено три случая расстояний между транспортными средствами.
. В этом первичном состоянии, предусмотрено три случая расстояний между транспортными средствами.
[0067] (1) В случае, если расстояние между транспортными средствами больше верхнего порогового значения расстояния в 30 метров и меньше 300 метров, начальный уровень иллюстрации светодиодной лампы 5 без передаваемых данных составляет I2=Iavg, начальный высокий уровень I3 в форме сигнала тока, соответствующей передаваемым данным, Составляет 2Iavg, и начальный низкий уровень I1 составляет 0. Частота I2 появления составляет 200 Гц, частота I1 появления составляет 20 кГц, и частота I3 появления составляет 21 кГц.
[0068] (2) В случае, если расстояние между транспортными средствами больше нижнего порогового значения расстояния в 10 метров и меньше верхнего порогового значения расстояния 30 метров, начальный уровень освещенности светодиодной лампы 5 без передаваемых данных составляет I2=Iavg, начальный высокий уровень I3 в форме сигнала тока, соответствующей передаваемым данным, составляет l,5Iavg, и начальный низкий уровень I1 составляет 0,5Iavg. Частота I2 появления составляет 1000 Гц, частота I1 появления составляет 500 кГц, и частота I3 появления составляет 510 кГц.
[0069] (3) В случае, если расстояние между транспортными средствами меньше нижнего порогового значения расстояния в 10 метров, начальный уровень освещенности светодиодной лампы 5 без передаваемых данных составляет I2=Iavg, начальный высокий уровень I3 в форме сигнала тока, соответствующей передаваемым данным, составляет l,5Iavg, и начальный низкий уровень I1 составляет 0,5Iavg. Частота I2 появления составляет 0 Гц, частота I1 появления составляет 2000 кГц, и частота I3 появления составляет 210 кГц.
[0070] (4) В случае, если расстояние между транспортными средствами больше расстояния эффективной связи в 300 метров, связь прекращается, и начальный номинальный ток освещения светодиодной лампы 5 составляет I2=Iavg.
[0071] В дополнение к вышеуказанным трем случаям уровней, могут точно задаваться дополнительные уровни. При выборе высокого уровня формы сигнала тока, высокий уровень должен обеспечиваться таким образом, что он меньше 5-кратного номинального тока Iavg освещения, чтобы предотвращать повреждение светодиодной лампы 5 посредством чрезмерного тока. Предпочтительно, диапазон регулирования температуры перехода светодиодной лампы 5, в общем, - составляет не больше 10%, и исключается слишком большой Диапазон регулирования, который заставляет ток светодиодной лампы 5 дневных ходовых огней слишком сильно снижаться, что не удовлетворяет предписанной яркости освещения.
[0072] В настоящем изобретении срок службы светодиодной - лампы обеспечивается посредством регулирования температуры перехода, и надежная связь обеспечивается между транспортными средствами с различными расстояниями посредством регулирования разности между высоким уровнем и низким уровнем формы сигнала тока в передаче данных. В аспекте, световая эффективность освещения повышается при предписанной освещенности, и эффект "неравномерности регулирования" минимизируется, чтобы защищать схемные устройства. В другом аспекте, скорость связи повышается посредством регулирования частоты, и обеспечивается своевременность связи.
[0073] Как показано на фиг. 11, фоточувствительное приемное устройство 5 в настоящем изобретении может реализовываться посредством использования традиционной технологии, например, адаптивного приемного устройства для светодиодной автомобильной лампы на основе оптической связи, раскрытого в изобретении, номер заявки которого представляет собой 2014205712760. Адаптивное приемное устройство включает в себя модуль фотоэлектрического преобразования, процессор 17 микрокомпьютера и микроэлектромеханический механизм 16.
Фотодиодная матрица 14 в модуле фотоэлектрического преобразования монтируется на микроэлектромеханическом механизме 16 в качестве устройства для приема и преобразования оптического сигнала. Фотодиодная матрица 14 имеет форму матрицы нескольких диодов и может принимать оптический сигнал в большом диапазоне углов. Несколько диодов выводят несколько электрических сигналов, которые усиливаются посредством многоканальной усилительной схемы 15 до стандартных сигналов и вводятся в процессор 17 микрокомпьютера. Поскольку позиции соответствующих фотодиодов относительно источника испускания оптических сигналов отличаются, интенсивность соответствующих принимаемых сигналов отличается. Процессор 17 микрокомпьютера распознает и выбирает сигналы. В общем, устройство является подвижным относительно источника испускания оптических сигналов, и процессор 17 микрокомпьютера управляет перемещением микроэлектромеханического механизма 16 на основе приема сигнала и регулирует угол приема фотодиодной матрицы 14, чтобы поддерживать прием информации отслеживания в реальном времени и получать лучший сигнал.
[0074] Чтобы более точно модулировать сигнал, вывод процессора 17 микрокомпьютера соединяется со схемой 18 избыточного усреднения, сконфигурированной с возможностью обрабатывать несколько сигналов в один сигнал. Сигнал имеет небольшое отклонение и высокую степень подобия. Вывод схемы 18 избыточного усреднения соединяется с первой схемой 19 фильтра нижних частот. Вывод первой схемы 19 фильтра нижних частот соединяется со схемой 20 формирования сигналов. Сигнал дополнительно очищается от шума и регуляризуется, чтобы упрощать демодуляцию сигнала.
[0075] Процессор 17 микрокомпьютера выбирает однокристальный микрокомпьютер, производительность обработки которого не ниже однокристального микрокомпьютера, тип которого представляет собой MC9S12XS128. Микроэлектромеханический механизм 16 в управляющем выходном контактном выводе может выбирать MEMS-систему, тип которой представляет собой NM-XY-100Х. Три выходных контактных вывода формы PWM-сигнала однокристального микрокомпьютера соединяются с входным контактным выводом микроэлектромеханического механизма 16.
[0076] Фотодиодная матрица 14 включает в себя несколько фотодиодов на основе GaN, которые, при работе, могут включать в себя шесть фотодиодов D1-D6, распределенных равномерно в каждой части. Как показано на фиг. 12,. положительный электрод каждого фотодиода соединяется с источником Vcc рабочего напряжения. Резисторы R1-R6 с идентичным сопротивлением, соответствующим отрицательным электродам фотодиодов D1-D6, заземляются. Отрицательные электроды шести фотодиодов соединяются с шестью контактными выводами PAD однокристального микрокомпьютера в соответствии "один-к-одному" через шестиканальную усилительную схему. Напряжения в отрицательных электродах фотодиодов D1-D6 соответствуют оптическим сигналам, принимаемым посредством себя, т.е. электрическим сигналам после фотоэлектрического преобразования.
[0077] Схема 18 избыточного усреднения представляет собой схему усреднения с суммированием. Как показано на фиг. 13, схема 18 усреднения с суммированием включает в себя модуль сравнения, тип которого представляет собой LM324C. Отрицательный входной контактный вывод модуля сравнения заземляется, и положительный входной контактный вывод модуля сравнения соединяется с выходным контактным выводом через резистор Rf. Однокристальный микрокомпьютер отсеивает смещенные сигналы из шести сигналов с тем, чтобы сохранять четыре сигнала. Порты РА0-РА3 однокристального микрокомпьютера соединяются с положительным входным контактным выводом модуля сравнения, соответственно, через резисторы R, Ra, Rb и Rc. Выходной контактный вывод V0 модуля сравнения соединяется с входным контактным выводом первой схемы 19 фильтра нижних частот и другим контактным выводом PAD однокристального микрокомпьютера.
[0078] Первая схема 19 фильтра нижних частот и схема 20 формирования сигналов могут реализовываться посредством использования традиционной технологии, например, первой схемы фильтра нижних частот второго порядка, как показано на фиг. 14.
[0079] Адаптивный способ приема фоточувствительного приемного устройства 5 в настоящем изобретении заключается в следующем. Фотодиодная матрица 14 принимает оптический сигнал, испускаемый посредством светодиодной лампы головного света, и выполняет фотоэлектрическое преобразование и устанавливает фотодиодную матрицу на актуаторе микроэлектромеханической системы. Несколько фотодиодов фотодиодной матрицы 14 принимают и преобразуют оптический сигнал параллельно и выводят электрические сигналы, число которых соответствует числу фотодиодов.
[0080] Процессор 17 микропроцессора обрабатывает несколько электрических сигналов, выводимых посредством фотодиодной матрицы 14. Процессор 17 микропроцессора вычисляет степень подобия или коэффициент взаимной корреляции каждого из сигналов и удаляет смещенные электрические сигналы, чтобы сохранять эффективные электрические сигналы. Например, фотодиодная матрица 14 выводит шесть электрических сигналов, отсеивает два электрических сигнала с тем, чтобы сохранять четыре электрических сигнала, и экономит четыре электрических сигнала. Четыре электрических сигнала обрабатываются и демодулируются в реальном времени.
[0081] Актуатор приводит в действие фотодиодную матрицу таким образом, что она микроперемещается в трехмерном пространстве с интервалами. Величина микроперемещения задается в качестве входной величины возмущений. Процессор 17 микрокомпьютера вычисляет степени подобия групп электрических сигналов фотодиодной матрицы 14 на основе способа наблюдений возмущений до и после возмущений, сравнивает степени подобия групп электрических сигналов до и после возмущений и определяет то, какая из групп электрических сигналов имеет максимальную степень подобия. Пространственный угол фотодиодной матрицы, соответствующий группе электрических сигналов с максимальной степенью подобия, задается в качестве оптимального угла приема и сохраняется в процессоре 17 микрокомпьютера. Процессор 17 микрокомпьютера передает информацию об оптимальном угле приема в микроэлектромеханическую систему. Актуатор регулирует фотодиодную матрицу до оптимального угла приема. Оптимальный угол приема обновляется по мере того, как вводятся каждые возмущения. Процессы вычисления выполняются посредством процессора 17 микрокомпьютера в программных кодах, и блок-схема последовательности операций способа принципов программы показана на фиг 15.
[0082] Вышеуказанные этапы обработки включают в себя обработку избыточного усреднения для эффективной группы электрических сигналов, чтобы получать сигнал с максимальной степенью подобия. Идеальный сигнал получается посредством фильтрации нижних частот и формирования сигнала с максимальной степенью подобия, и затем процесс переходит к этапу демодуляции. Величина вычисления степени подобия между группами электрических сигналов является значительной. Чтобы упрощать вычисление и улучшать осуществимость на практике, сигнал с максимальной степенью подобия в предыдущей группе сигналов используется для того, чтобы представлять группу электрических сигналов, и используется для того, чтобы вычислять и сравнивать степень подобия. Следовательно, сигнал с максимальной степенью подобия возвращается в процессор 17 микрокомпьютера в качестве опорного электрического сигнала для вычисления степени подобия.
[0083] Дополнительно, процесс вычисления оптимального пространственного угла приема включает в себя этапы a-d.
[0084] На этапе а, предполагается, что координата оптимального пространственного угла приема представляет собой (Xopt, Yopt, Zopt).
[0085] На этапе b, предполагается, что координата угла приема до того, как вводятся k-е возмущения, представляет собой (Х0, Y0, Z0), эффективная группа (V01,..., V0n) электрических сигналов получается посредством вычисления подобия или операции взаимной корреляции группы форм сигналов, соответствующей электрическому сигналу. Сигнал Vk с максимальной степенью подобия получается посредством выполнения избыточного усреднения для эффективной группы (V01,..., V0n) электрических сигналов. Сигнал Vk с максимальной степенью подобия сравнивается с сигналом Vk-1 с максимальной степенью подобия до того, как вводятся (k-1)-е возмущения, чтобы получать степень fk-1 подобия.
[0086] На этапе с, вводятся k-е возмущения. Величина возмущений представляет собой (ΔХ0, ΔY0, ΔZ0). Координата угла приема после возмущений представляет собой (Х0+ΔХ0, Y0+ΔY0, Z0+ΔZ0). Эффективная группа (V11,..., V1m) электрических сигналов получается посредством вычисления подобия или операции взаимной корреляции группы форм сигналов, соответствующей электрическому сигналу. Сигнал Vk+1 с максимальной степенью подобия получается посредством выполнения избыточного усреднения для эффективной группы (V11,..., V1m) электрических сигналов. Сигнал Vk+1 с максимальной степенью подобия сравнивается с сигналом Vk с максимальной степенью подобия до того, как вводятся k-е возмущения, чтобы получать степень fk подобия.
[0087] На этапе d, fk-1 сравнивается с fk. Если fk-1 больше fk, (Х0, Y0, Z0) назначается (Xopt, Yopt, Zopt), а если fk-1 не больше fk, (Х0+ΔХ0, Y0+ΔY0, Z0+ΔZ0) назначается (Xopt, Yopt, Zopt).
[0088] В процессе вычисления оптимального пространственного угла приема, координата оптимального угла приема (Xopt, yopt, Zopt) определяется посредством предыдущих возмущений. Поскольку в начале вычисления оптимального пространственного угла приема отсутствуют возмущения, угол приема токового диода может первоначально назначаться оптимальному углу приема, и оптимальный угол приема постоянно изменяется в последующих нескольких возмущениях.
[0089] Согласно технологии обработки сигналов, принципы вычисления подобия описываются ниже.
[0090] Матрица степени подобия во время k представляет собой  , где
, где  представляет оператор свертки. Группа Vk-1 (V1..., Vi,..., Vj,..., Vn) сигналов в предыдущее время перед временем k задается в качестве опорной волны группы V сигналов обнаружения в текущее время k.
представляет оператор свертки. Группа Vk-1 (V1..., Vi,..., Vj,..., Vn) сигналов в предыдущее время перед временем k задается в качестве опорной волны группы V сигналов обнаружения в текущее время k.
[0091] Заданная степень подобия представляет собой  , где
, где  представляет единичную ступенчатую функцию, и Sth является заданным пороговым значением.
представляет единичную ступенчатую функцию, и Sth является заданным пороговым значением.
[0092] В конкретной реализации принципов вышеприведенного вычисления, Sth зачастую равен 0,8, и число каналов передачи сигналов диодной матрицы зачастую равно 6-10. Процесс вычисления является сложным, и в традиционной технологии существуют специальная функция свертки и специальная функция вычисления подобия, которые могут непосредственно вызываться в программах кодирования.
[0093] На практике, если каждые возмущения применяются только в одномерном направлении, число регулирований и число операций, требуемых для того, чтобы выполнять регулирование до оптимального угла приема, значительно увеличивается, и скорость нахождения оптимального угла приема становится небольшой. Поскольку транспортное средство перемещается, актуатор продолжает регулирование, но не может оставаться в относительно стабильном состоянии, имеет тенденцию принудительно влиять на эффект приема сигналов, и требования по рабочей скорости для процессора 17 микропроцессора и скорости отклика для микроэлектромеханической системы являются очень высокими. Следовательно, практично и несложно выполнять такую реализацию, чтобы применять величину (ΔХ0, ΔY0, ΔZ0) возмущений в направлении трехмерного синтеза и перемещать актуатор на 0,01 мм, соответственно, что позволяет удовлетворять эффекту адаптивного отслеживания.
[0094] В настоящем изобретении фотоэлектрическое преобразование достигает посредством использования диодной матрицы на основе GaN, угол приема увеличивается, и интерференция внешнего окружающего света подавляется. Помимо этого, технология избыточного усреднения применяется к нескольким сигналам, и диодная матрица на основе GaN инкапсулируется в микроэлектромеханической структуре. На этой основе, процессор микрокомпьютера достигает вычисления и управления оптимального пространственного угла (Xopt, Yopt, Zopt) приема в комбинации со способом наблюдений возмущений, что улучшает способность к отслеживанию оптических сигналов. По сравнению с традиционными лавинными фотодиодами и кремниевыми фотодиодами с высокой ценой и слабой спектральной избирательностью, светодиод на основе GaN имеет преимущества низких затрат и узкой полосы спектра. Вкратце, в решениях, чувствительность оптических сигналов является высокой, угол приема является большим, и способность к динамическому отслеживанию является сильной. Изменяющаяся во времени проблема позиций между передающим устройством и приемным устройством двух транспортных средств разрешается, в частности, за счет оптической связи между транспортными средствами.
Устройство и способ адаптивного приема для связи с использованием светодиодных ламп транспортного средства
Передающее устройство и способ управления оптической связью посредством led-фары транспортного средства
Гидравлический насос
Устройство и способ адаптивного приема для связи с использованием светодиодных ламп транспортного средства
Передающее устройство и способ управления оптической связью посредством led-фары транспортного средства

