Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ
Вид РИД
Изобретение
Изобретение относится к приборостроению, в частности к инерциальным навигационным системам, и может быть использовано для определения ошибок ориентации измерительных осей гироскопов и маятниковых акселерометров в бесплатформенной инерциальной навигационной системе (БИНС) после температурных, вибрационных или ударных воздействий, а также в процессе эксплуатации.
Как известно, при паспортизации гироскопов и акселерометров определяется ориентация их измерительных осей относительно либо реальной ортогональной системы координат, например в виде нормалей к очень точному кубику, закрепленному на корпусе БИНС, либо к ортогональной системе координат, образованной нормалями к посадочным граням корпуса БИНС. Однако, после температурных и механических воздействий положение кубика относительно корпуса БИНС либо взаимное расположение посадочных граней корпуса БИНС изменяется. Это изменение может достигать сотен угловых секунд при типичных требованиях 30-40 угловых секунд [Еремин Л.В., Зубов А.Г., Колбас Ю.Ю., Соловьева Т.И. Аппроксимация воспроизводимых зависимостей масштабного коэффициента и матрицы ориентации измерительных осей трехосного квазичетырехчастотного зеемановского лазерного гироскопа // Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия: Приборостроение. 2013. №2 (91). с. 100-112]. Поэтому прямое измерение отклонения измерительных осей гироскопов и акселерометров от ранее использованной ортогональной системы координат может привести к существенным ошибкам.
В связи с этим возникает необходимость разработки способа определения погрешностей ориентации измерительных осей лазерных гироскопов и маятниковых акселерометров в составе БИНС, обеспечивающего более высокую точность.
Известен способ [RU 2488776 C1, G01C 25/00, 27.07.2013], заключающийся в калибровке систематических значений параметров модели ошибок трехосного лазерного гироскопа, в том числе систематических составляющих смещения нулей, причем калибровку смещений нулей трехосных лазерных гироскопов с одним общим вибратором производят не по непосредственным показаниям трехосных лазерных гироскопов - приращениям интегралов проекций вектора абсолютной угловой скорости на оси чувствительности, а по результирующей погрешности определения пространственной ориентации посредством бесплатформенной инерциальной системы ориентации на основе трехосных лазерных гироскопов с одним общим вибратором.
Недостатком способа является его относительно узкая область применения.
Известен также способ [RU 2505785 C1, G01C 21/24, 27.01.2014], включающий измерения кажущихся ускорений движущегося в инерциальном пространстве объекта-носителя и жестко связанного с ним отделяемого объекта, производимые акселерометрами эталонной инерциальной навигационной системы объекта-носителя в базовой инерциальной системе координат (БИСК) и акселерометрами ведомой инерциальной навигационной системы отделяемого объекта в приборной инерциальной системе координат (ПИСК), которая образуется осями чувствительности акселерометров ведомой ИНС, передачи с определенной периодичностью результатов измерений акселерометров эталонной ИНС носителя в вычислительное устройство (ВУ) отделяемого объекта, причем в ходе движения, начиная с некоторого момента ti, по измерениям акселерометров эталонной ИНС и ведомой ИНС, накапливают кажущиеся скорости до достижения модулем вектора кажущейся скорости, получаемой по показаниям акселерометров ведомой ИНС, заданного значения, в этот момент ti+1 фиксируют в ВУ отделяемого объекта компоненты векторов кажущейся скорости, накопленные на интервале [ti, ti+1] по показаниям эталонной ИНС и ведомой ИНС, по этим данным определяют и запоминают в ВУ отделяемого объекта ошибку модуля вектора кажущейся скорости, вызванную погрешностями измерений ведомой инерциальной навигационной системы, и относительные проекции трех векторов кажущейся скорости, сформированные по показаниям каждого отдельного акселерометра ведомой ИНС, на орт кажущейся скорости, накопленной по показаниям акселерометров эталонной ИНС, повторяют такие действия не менее чем на двух интервалах активного движения, характеризующихся взаимно неколлинеарными направлениями накапливаемых на них и на первом интервале векторов кажущейся скорости, по показаниям акселерометров эталонной ИНС объекта-носителя и ведомой ИНС отделяемого объекта, накопленным хотя бы на одном участке движения [t1п, t2п], характеризующимся малыми значениями перегрузок по осям БИСК и достаточной продолжительностью участка, определяют в ВУ отделяемого объекта ошибки кажущейся скорости по осям чувствительности каждого акселерометра ведомой ИНС, вызванные совокупным влиянием погрешностей измерений этой ИНС, значение ошибки каждого акселерометра делят на величину интеграла от функции влияния погрешности измерений соответствующего акселерометра, независящей от перегрузки, на погрешность накапливаемой на интервале [t1п, t2п] по оси чувствительности данного акселерометра кажущейся скорости, тем самым определяют и запоминают параметры погрешностей измерений каждого акселерометра, независящие от перегрузки, из запомненных ошибок модулей измеренной кажущейся скорости, полученных не менее чем на трех интервалах активного движения, характеризующихся значительными перегрузками, вычитают результаты умножений значений параметров погрешностей, не зависящих от перегрузки, на величины интегралов от функции влияния данного параметра каждого акселерометра ведомой БИНС на ошибку модуля кажущейся скорости, набранной на соответствующем интервале активного движения, и определяют тем самым значения правых частей системы линейных уравнений для параметров погрешностей измерений акселерометров, зависящих от перегрузки, решают линейную систему, определяют из нее и запоминают значения параметров погрешностей измерений акселерометров, зависящих от перегрузки, по найденным значениям не зависящих и зависящих от перегрузки параметров погрешностей каждого акселерометра ведомой БИНС уточняют получаемые от этих акселерометров текущие значения кажущихся ускорений и используют их при численном интегрировании в реальном масштабе времени основного уравнения инерциальной навигации навигационной траектории отделяемого объекта.
Недостатком этого способа также является его относительно узкая область применения.
Наиболее близким по технической сущности к предложенному является способ определения температурных зависимостей масштабных коэффициентов, смещений нуля и матриц ориентации осей чувствительности лазерных гироскопов и маятниковых акселерометров в составе инерциального измерительного блока при стендовых испытаниях [RU 2566427 C1, G01C 21/24, 27.10.2015], основанный на проведении измерений параметров маятниковых акселерометров, а также обработке результатов измерений, в процессе которых устанавливают на стенде инерциальный измерительный блок с трехосным лазерным гироскопом и тремя маятниковыми акселерометрами, оснащенными датчиками вращения, которые ориентируют в направлении соответствующих осей собственной системы координат инерциального измерительного блока, на каждом такте измерений определяют количество импульсов для каждого из трех датчиков вращения лазерного гироскопа, пропорциональное проекции вектора угла поворота лазерного гироскопа за один такт измерений на каждую из трех осей чувствительности лазерного гироскопа, определяют средние за один такт измерений значения напряжений на выходе трех маятниковых акселерометров, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности маятниковых акселерометров, и средние за один такт измерений значения температуры на каждом из трех датчиков вращения трехосного лазерного гироскопа и трех маятниковых акселерометров, по которым определяют температурные зависимости масштабных коэффициентов датчиков вращения лазерного гироскопа в отдельности для каждой моды «+» и «-» и для двух диапазонов угловых скоростей диапазона «низких» (Н) угловых скоростей, меньших значения, соответствующего величине амплитуды частотной подставки, и диапазона «высоких» (В) угловых скоростей, превышающих такую величину, из соотношений
где α = х, у, z - оси чувствительности датчиков вращения лазерного гироскопа; Tqα - текущая температура, измеряемая в соответствующем датчике вращения лазерного гироскопа, Т0 - фиксированное значение температуры, равное 25°С, температурные зависимости смещения нулей для каждого датчика вращения лазерного гироскопа определяют из соотношений, содержащих магнитную (М), изменяющую знак при переходе с одной моды на другую и немагнитную (НМ), не зависящую от моды, составляющие

температурные зависимости масштабных коэффициентов и смещений нулей маятниковых акселерометров из соотношений

где α = х, у, z - оси чувствительности МА; Таα - текущая температура, измеряемая в соответствующем маятниковом акселерометре, температурные зависимости недиагональных элементов матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров
из соотношений

где Tq - температура лазерного гироскопа, осредненная по всем трем датчикам вращения, а диагональные элементы матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров определяют через недиагональные, исходя из условия нормировки по строкам
Недостатком наиболее близкого технического решения является его относительно узкая область применения, поскольку известный способ, хотя и позволяет определить температурные зависимости характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциального измерительного блока (ИИБ), в частности, масштабных коэффициентов датчиков вращения ЛГ и МА, смещений нуля датчиков вращения ЛГ и МА, матриц направляющих косинусов осей чувствительности ЛГ и МА в ортогональной системе координат, жестко связанной с корпусом ИИБ, но не позволяет определить ошибки ориентации измерительных осей гироскопов и маятниковых акселерометров в БИНС, например, после температурных, вибрационных или ударных воздействий (испытаний) и в процессе эксплуатации, а также не обеспечивает приемлемой достоверности и точности измерений.
Задачей, на решение которой направлено предложенное изобретение, является расширение области применения и повышение точности определения ошибок ориентации путем уменьшения влияния местной вертикали и влияния некомпенсированных смещений дрейфов нулей на оценку погрешностей ориентации измерительных осей.
Требуемый технический результат заключается в расширении области применения путем введения дополнительного арсенала технических средств (операций способа), обеспечивающих определение ошибок ориентации измерительных осей гироскопов и маятниковых акселерометров в БИНС после температурных, вибрационных или ударных воздействий (испытаний) и в процессе эксплуатации с одновременным повышением достоверности и точности измерений.
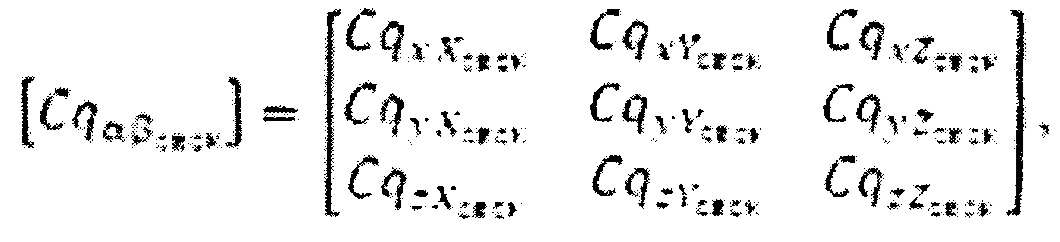
Поставленная задача решается, а требуемый технический результат достигается тем, что, в способе, основанном на проведении измерений параметров маятниковых акселерометров и лазерных гироскопов и обработке результатов измерений, при котором устанавливают на установочной платформе испытательного стенда бесплатформенную инерциальную навигационную систему с тремя лазерными гироскопами и тремя маятниковыми акселерометрами, согласно изобретению, бесплатформенную инерциальную навигационную систему устанавливают на установочной платформе испытательного стенда с одновременным формированием эталонной ортогональной системы координат XYZ, ось Y которой совпадает с внутренней осью испытательного стенда, две другие оси ориентированы таким образом, что ось X совпадает с внешней осью испытательного стенда, а ось Z - дополняет оси X и Y до правой тройки осей, и определяют матрицы ориентации осей х, у, z в эталонной ортогональной системе координат XYZ отдельно по показаниям с гироскопов (Cq) и акселерометров (Са)
после чего определяют углы неортогональности разноименных осей по каждой из матриц ориентации осей х, у, z с помощью скалярного произведения
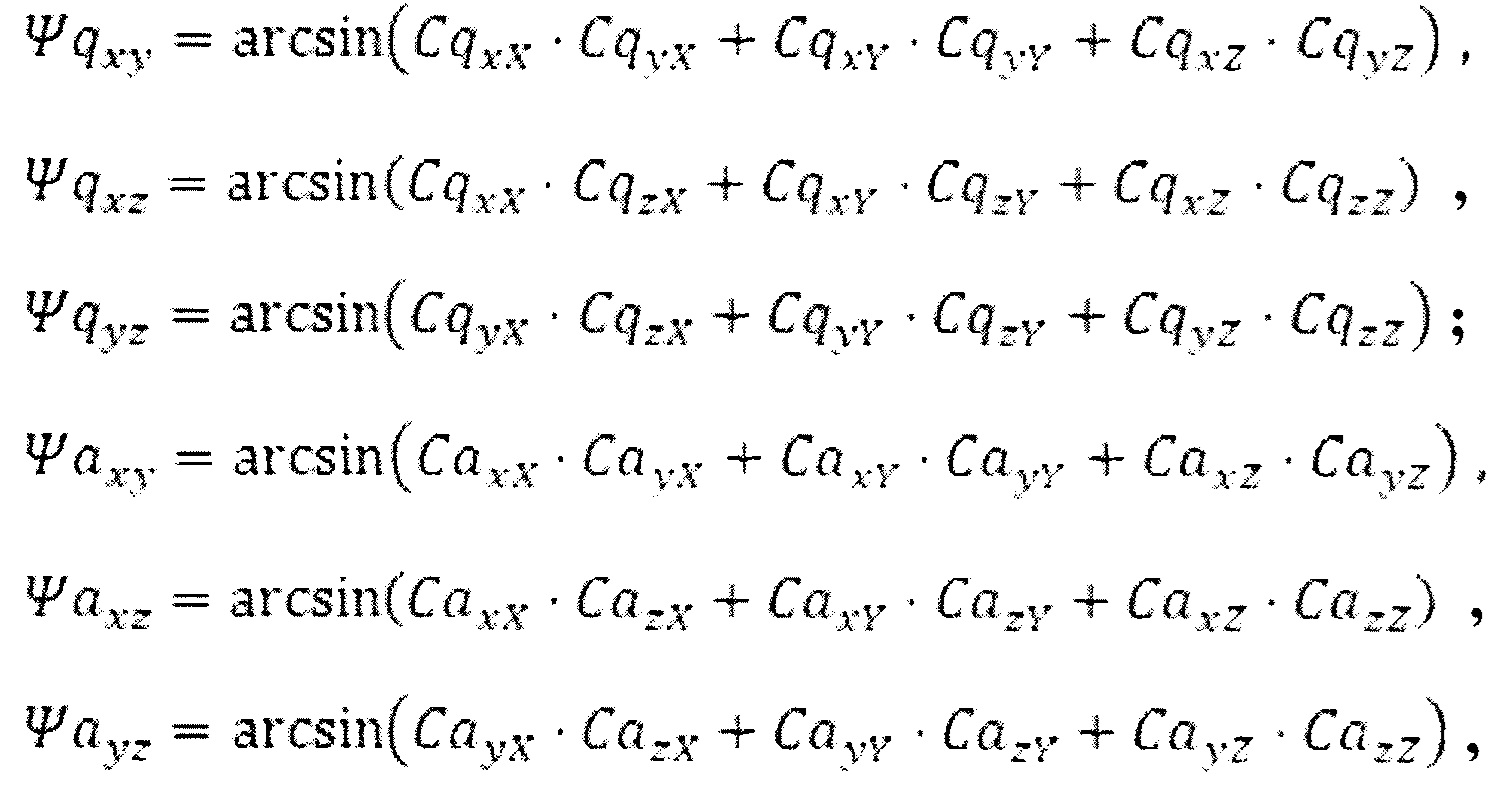
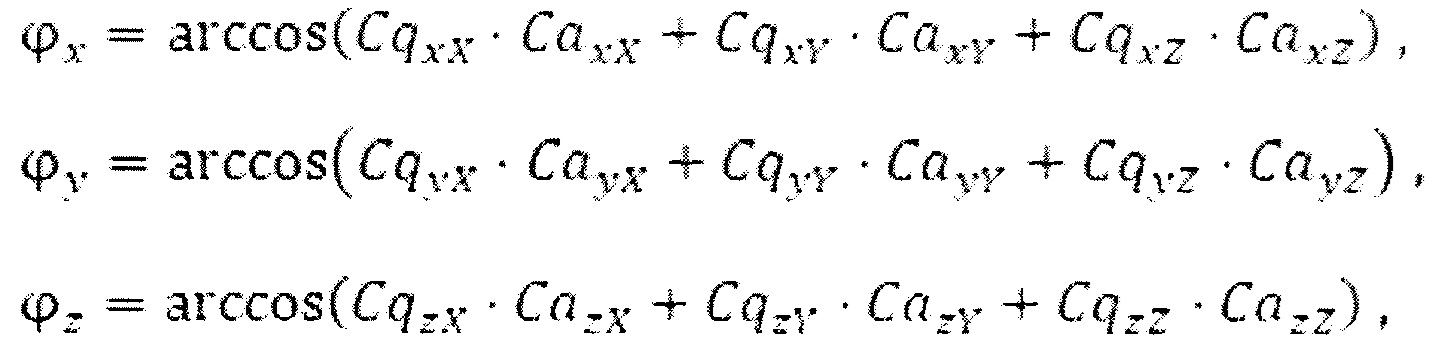
а также углы между одноименными осями
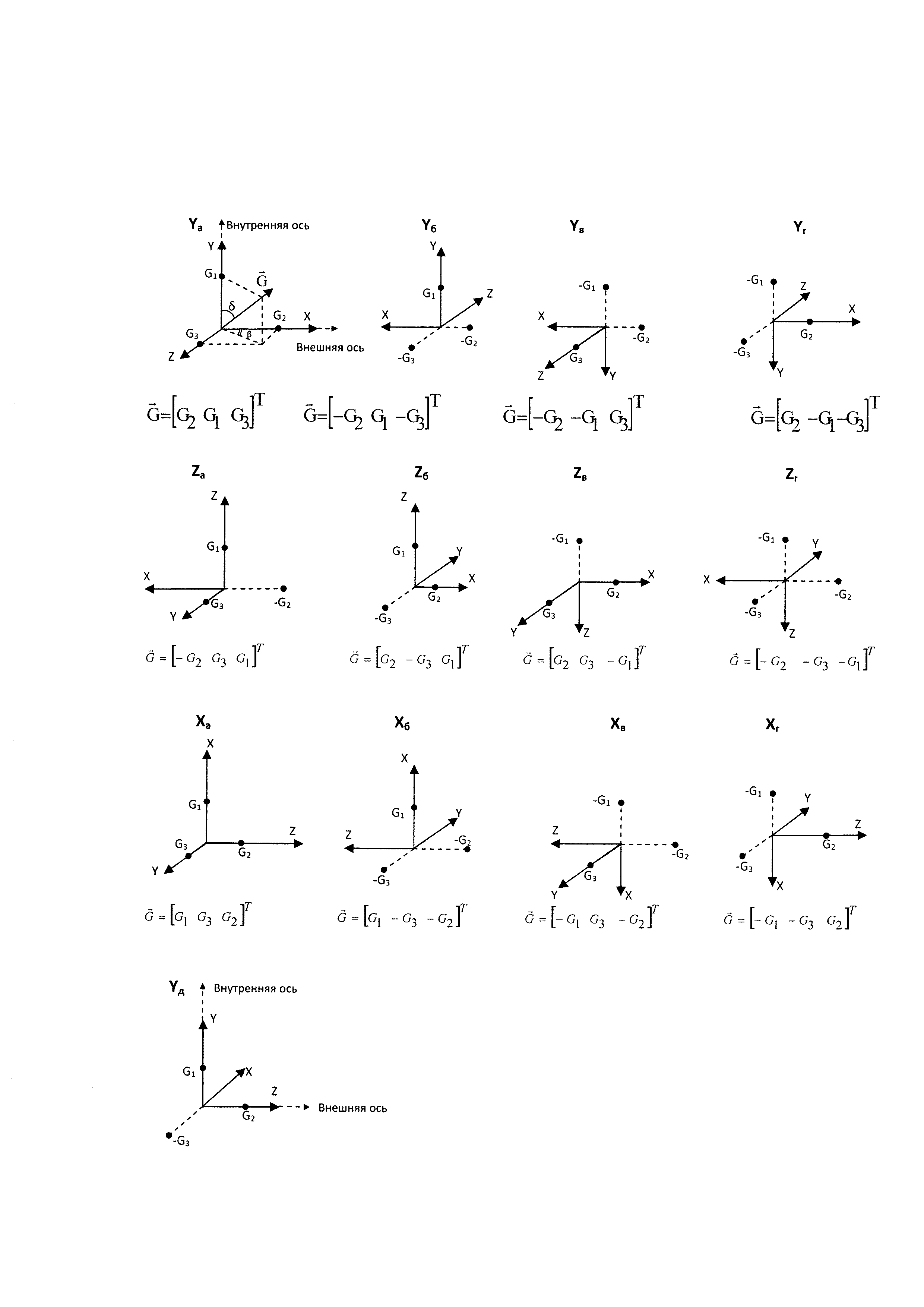
На чертеже представлены положения координат относительно осей стенда.
Способ определения ошибок ориентации измерительных осей гироскопов и маятниковых акселерометров в БИНС реализуется следующим образом.
В штатном режиме функционирования на выходе БИНС на каждом k-м такте съема информации формируются измеренные значения приращений углов поворота Δqx, Δqy,, Δqz и значения кажущихся линейных ускорений αx, αy, αz, спроецированных на оси х, у, z ортогональной приборной системы координат (ПСК).
При этом во встроенном в БИНС вычислителе используется полученная при ее изготовлении и настройке информация об ориентации в ПСК измерительных осей трех лазерных гироскопов (ЛГ) и трех маятниковых акселерометров (МА).
Погрешности определения ориентации измерительных осей, а также изменение самой ориентации этих осей вследствие неучтенных внешних факторов приводят к тому, что, согласно полученным измерениям, ПСК становится неортогональной.
В предложенном способе определения погрешностей ориентации основан на определении оценок матриц ориентации осей х, у, z ПСК в некоторой эталонной ортогональной системе координат (ОСК) XYZ отдельно по показаниям с гироскопов (Cq) и акселерометров (Са):


с последующим определением углов неортогональности разноименных осей ПСК по каждой из этих матриц с помощью скалярного произведения:


а также углов между одноименными осями ПСК, найденным согласно (1) и (2)

Для вычисления матриц (1) и (2) проводятся испытания БИНС на высокоточном двухосном динамическом стенде. Для этого БИНС с помощью специальной оснастки устанавливается на платформу стенда таким образом, чтобы в исходном положении одна из осей ПСК (например, у) с была ориентирована вдоль положительного направления внутренней оси стенда, а любая другая (например, x) - вдоль положительного направления внешней оси. В качестве эталонной ОСК используется жестко связанная с установочной платформой стенда ортогональная система координат XYZ, ось Y которой совпадает с внутренней осью стенда, а две другие оси в исходном положении ориентированы таким образом, что ось X совпадает с внешней осью стенда, а ось Z - дополняет оси X и Y до правой тройки системы координат (см. чертеж, положение Ya).
Высокоточный стенд обеспечивает ортогональность осей эталонной ОСК, например, с точностью до 5 угловых секунд, погрешности позиционирования установочной платформы не более 5 угловых секунд, а также равные значения углового ускорения при разгоне до заданной угловой скорости и при торможении до полной остановки.
Для определения элементов матрицы (1) при помощи высокоточного стенда последовательно выполняются по два вращения на N полных оборотов в положительном и отрицательном направлениях с заданной угловой скоростью относительно осей X, Y, Z эталонной ОСК с приемом данных от ЛГ на осях х, у, z. Вращения по оси Y выполняются с помощью внутренней оси стенда из положения Ya. Вращения по осям X и Z осуществляются с помощью внешней оси стенда из положений Ya и Yд соответственно.
На каждом k-м такте съема данных получаем три значения накопленного за время этого такта угла δqxk, δqyk, δqzk на осях х, у, z ПСК.
По этим данным возможно вычисление измеренных на осях ПСК значений суммарных углов поворота БИНС для каждого из указанных выше шести вращений:

где нижний индекс α = x,y,z обозначает ось ПСК, которой соответствуют измеренные углы, в верхнем индексе β = X, У, Z обозначает ось ОСК, по которой выполнено вращение, знак «+» или «-» - направление вращения; Nβ - количество тактов в интервале суммирования приращений углов при вращении по оси β (одинаковое для вращений в противоположных направлениях). Начало и длительность интервалов суммирования выбирается с запасом таким образом, чтобы вращение полностью принадлежало этим интервалам.
По значениям  и
и  для каждого α = х, у, z и каждого β = X, Y, Z могут быть определены значения разностей:
для каждого α = х, у, z и каждого β = X, Y, Z могут быть определены значения разностей:

а затем и значения искомых элементов матрицы (1) по формуле:

Для определения элементов матрицы (2) с помощью стенда последовательно реализуются 12 положений БИНС: ζ = Ya, Yб, Yв, Yг; Za, Zб, Zв, Zг; Xa, Хб, Xв, Хг (см. чертеж). В каждом из положений ζ измеряются и вычисляются средние значения кажущихся линейных ускорений  на осях ПСК α = х, у, z.
на осях ПСК α = х, у, z.
По значениям  для каждого α = х, у, z и каждого β = X, Y, 2 определяются значения линейных комбинаций:
для каждого α = х, у, z и каждого β = X, Y, 2 определяются значения линейных комбинаций:

а затем искомые элементы матрицы (2) по формуле:

При вычислении линейных комбинаций (9), благодаря суммированию в круглых скобках, устраняется влияние ошибок установки высокоточного стенда относительно местной вертикали на оценку погрешностей ориентации измерительных осей МА, а благодаря вычитанию - влияние некомпенсированных смещений нулей МА. Это повышает достоверность и точность измерений.










Способ выделения оптических импульсов
Способ сканирования пространства лазерным лучом и определения координат обнаруженных объектов
Способ шумовой автоматической регулировки порога
Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа
Импульсное пороговое устройство с шумовой стабилизацией порога
Способ приема импульсных сигналов
Пороговое устройство с автоматической шумовой стабилизацией порога
Устройство для выявления скрытых дефектов реставрированных деталей кузова автомобиля
Способ обнаружения оптических и оптико-электронных приборов
Способ измерения углов между плоскостями моноблока резонатора кольцевого лазера с неплоским оптическим контуром и устройство для его реализации
Способ контроля состояния конструкции инженерно-строительного сооружения
Способ компенсации влияния медленного меандра на показания лазерного гироскопа
Способ уменьшения магнитного дрейфа зеемановских лазерных гироскопов
Способ контроля состояния конструкции инженерно-строительного сооружения
Способ изготовления окисной пленки холодного катода газового лазера в тлеющем разряде постоянного тока
Система регулировки периметра зеемановского лазерного гироскопа
Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе
Система регулировки периметра зеемановского лазерного гироскопа
Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа
Способ рассечения биологической ткани лазерным излучением

