Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к медицинской технике, в целом к медицинской системе для дистанционного беспроводного управления движением инородного тела, расположенного внутри субъекта, а конкретнее, к магнитной системе управления перемещением в пространстве и угловой ориентацией объекта, находящегося в теле субъекта, посредством внешнего магнитного поля. Однако, следует понимать, что описанная система может также найти применение в других системах и сценариях для управлением движением объекта, имеющим намагниченность.
УРОВЕНЬ ТЕХНИКИ
Так как любое намагниченное тело или может рассматриваться как магнитный диполь или их совокупность и испытывать силовое воздействие за счет приложенного внешнего магнитного поля, то имеет важное практическое значение возможность использования магнитных полей в качестве инструмента для управления перемещением и ориентацией указанных объектов, в частности, для медицинских применений.
В организм человека преднамеренно вводятся инородные тела, имеющие намагниченность, для выполнения различных задач. Управление ими с помощью внешнего магнитного поля позволяет безболезненно для пациента проводить различные диагностические и/или терапевтические процедуры.
В начале 2000х Американская компания «Stereotaxis Inc.» разработала магнитную систему для управления микророботами в нейрохирургии. Этот прибор обладал высокой точностью и большой скоростью реакции. Первое поколение этой системы - «Telstar system» состоит из 3-х сверхпроводящих электромагнитов (0.15Т), охлаждаемых жидким гелием. Точность манипуляций теоретически составляла менее 1 мм.
Магнитная система управления для минимально инвазивных операций (Catheter Guidance Control and Imaging (CGCI)) от компании «Magnetic Corp» из US2013006100 A1, опубл.03.01.2013, состоит из 8 охлаждаемых электромагнитов, создающих требуемое магнитное поле вокруг объекта. Эти магниты способны в режиме реального времени изменять направление и величину действующей силы поля.
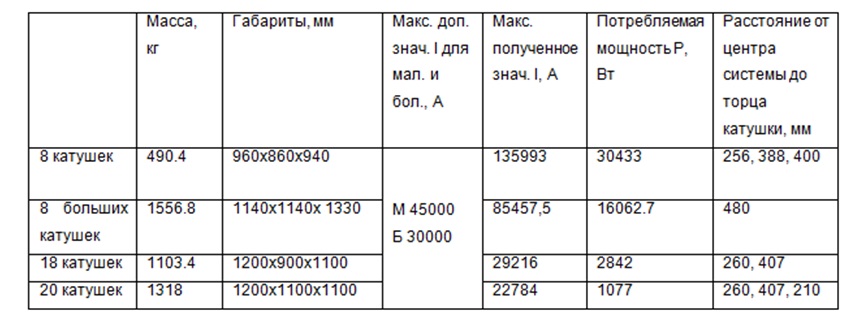
В US8452377 B2 (опубл. 28.05.2013) описывается магнитная система, включающая конфигурацию из 12 отдельных катушек для управления движением магнитного объекта, такого как эндоскопическая капсула, в рабочем пространстве, и соответствующие блоки активации для подачи тока в соответствующие катушки. Пациент расположен вдоль оси z системы, а рабочий объем центрирован между катушками 1-6 (фиг. 1). В зависимости от текущего состояния объекта система ориентирует его и продвигает в нужном направлении за счет генерации компонент магнитного поля и его градиентов катушками 1-12. При этом электромагнитные катушки 8 и 10 (а также 7 и 9) физически пересекаются, что не позволяет использовать в системе электромагнитные катушки с сердечниками.
Наиболее близким аналогом к заявляемому техническому решению является разработанная группой ученых из ETH Zurich система управления микроботами внутри глаза «OctoMag» (Michael P. Kummer, Jake J. Abbott, Bradley E. Kratochvil, Ruedi Borer, Ali Sengul, Bradley J. Nelson. OctoMag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE TRANSACTIONS ON ROBOTICS, VOL. X, NO. X, JANUARY 2010). Через иглу микроскопический робот (285 µm) вводится в стекловидное тело. Управление движением робота осуществляется при помощи магнитного поля, генерируемого 8 магнитными катушками. Как правило, магнитное управление реализуется в однородном магнитном поле. «Octomag» уникален тем, что управление происходит в сложных неоднородных полях. Манипуляции осуществляются оператором, который визуально наблюдает за системой, или посредством видеокамер.
Однако описанные выше конфигурации из n отдельных активированных катушек могут иметь некоторые выделенные направления и области пространства, для которых достижение требуемых силовых характеристик движения намагниченного объекта может приводить к значительному увеличению потребления мощности электромагнитами.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническая проблема, решаемая настоящим изобретением, состоит в том, что существующие магнитные системы с той или иной конфигурацией n электромагнитных катушек имеют выделенные направления и области рабочего пространства, для которых достижение требуемых силовых характеристик движения объекта, имеющего намагниченность и находящегося внутри тела пациента, может приводить к значительному увеличению потребления мощности электромагнитами.
Задача настоящего изобретения – создать магнитную систему с уменьшенным потреблением мощности и уменьшенными массо-габаритными характеристиками по сравнению с аналогичными известными системами с такой пространственной конфигурацией n электромагнитных катушек, которая бы позволила бы для каждой точки рабочего объема создать магнитное поле требуемой величины и направления (в пределах, соответствующих конкретной системе), так и любой градиент магнитного поля (в пределах, соответствующих конкретной системе), которое будет перемещать и ориентировать исследуемый объект в реальном времени.
Технический результат, обеспечиваемый изобретением, заключается в снижении массо-габаритных характеристик магнитной системы одновременно со снижением потребности в энергии для работы магнитной системы, обеспечивающей управление движением объекта, обладающего намагниченностью.
Технический результат достигается за счет того, что устройство для управления движением объекта, имеющего намагниченность, в теле субъекта, включает по меньшей мере 8 стационарных электромагнитных катушек с сердечниками, которые при подаче тока генерируют компоненты электромагнитного поля и компоненты градиентов магнитного поля для задания требуемого направления объекта в рабочей области и требуемого усилия, приложенного к объекту, по меньшей мере один блок управления, которые обеспечивает синхронную подачу электрического тока в каждую из указанных катушек независимо друг от друга, при этом геометрия и взаимное расположение упомянутых катушек выбраны таким образом, чтобы образовывать сквозной продольный проход для размещения внутри него тела субъекта и обеспечить одновременно максимальную приближенность катушек к рабочей области и максимальную разнонаправленность осей катушек к рабочей области.
В некоторых вариантах изобретения сквозной проход имеет по существу цилиндрическое сечение.
В некоторых вариантах изобретения рабочей областью системы является сферическая область диаметром в пределах диаметра сквозного прохода и располагающаяся в центре системы.
В некоторых вариантах изобретения катушки разбиты на три группы, одна из которых является центральной, а две другие – крайние, при этом центры катушек центральной группы располагаются по окружности вокруг тела субъекта таким образом, что их оси перпендикулярны продольной оси сквозного прохода; а катушки двух крайних групп размещены максимально близко к катушкам центральной группы таким образом, что их оси расположены под углом к продольной оси сквозного прохода и направлены в центр рабочей области.
В некоторых вариантах изобретения угол между осью катушки из крайней группы и продольной осью сквозного прохода лежит в пределах от 30 до 60 градусов.
В некоторых вариантах изобретения система дополнительно включает е электромагнитные катушки без сердечников.
В некоторых вариантах изобретения в качестве объекта может выбран один из: эндоскопическая капсула, медицинский микроробот, лекарственный раствор с магнитными наночастицами, микро или наноиглы, микрометки, сенсоры и стимуляторы.
В некоторых вариантах изобретения эндоскопическая капсула совершает движение по спиральной траектории вдоль трубчатого органа субъекта под действием вращающегося магнитного поля, генерируемого катушками.
В некоторых вариантах изобретения эндоскопическая капсула имеет намагниченность с вектором намагниченности, расположенным относительно продольного направления корпуса капсулы под углом в диапазоне острых углов (0<δ<90°), и содержит модуль камеры для захвата изображения и передачи изображения на удаленное устройство обработки полученных данных.
На энергопотребление, как известно, влияет как расположение, так и число электромагнитных катушек. Известно, что минимальное количество электромагнитных катушек, необходимых для управления 5-ю степенями свободы движения объектом, имеющим намагниченность, равно 8.
Поэтому для компенсирования недостатка существующих устройств для управления объектами, имеющих намагниченность, посредством внешнего магнитного поля, в настоящем изобретении увеличено число электромагнитных катушек, и они размещены таким образом, чтобы покрыть большее количество точек пространства и направлений, в которых для достижения той же силы будет требоваться меньшая суммарная мощность.
Требуемая конфигурация достигается размещением электромагнитов таким образом, чтобы по меньшей мере часть их осей смотрели в центр системы, а плоскости электромагнитов покрывали максимально возможную площадь поверхности вокруг пациента.
Магнитная система (устройство), состоящая из по меньшей мере 8 стационарных электромагнитных катушек, разделенных функционально на группы, позволяет создавать необходимые конфигурации магнитного поля для управления магнитным объектом с 5-ю степенями свободы в теле субъекта.
Указанная конфигурация позволяет использовать электромагнитные катушки с сердечниками, что значительно снизит энергопотребление системы.
Синхронная подача электрического тока в каждую из катушек независимо друг от друга обеспечивает возможность создания результирующего магнитного поля и таким образом управления объекта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения. На чертежах одинаковые позиции применяются для обозначения одинаковых частей.
На фиг. 1 представлена принципиальная схема конфигурации магнитной системы из существующего уровня техники из 12 электромагнитных катушек.
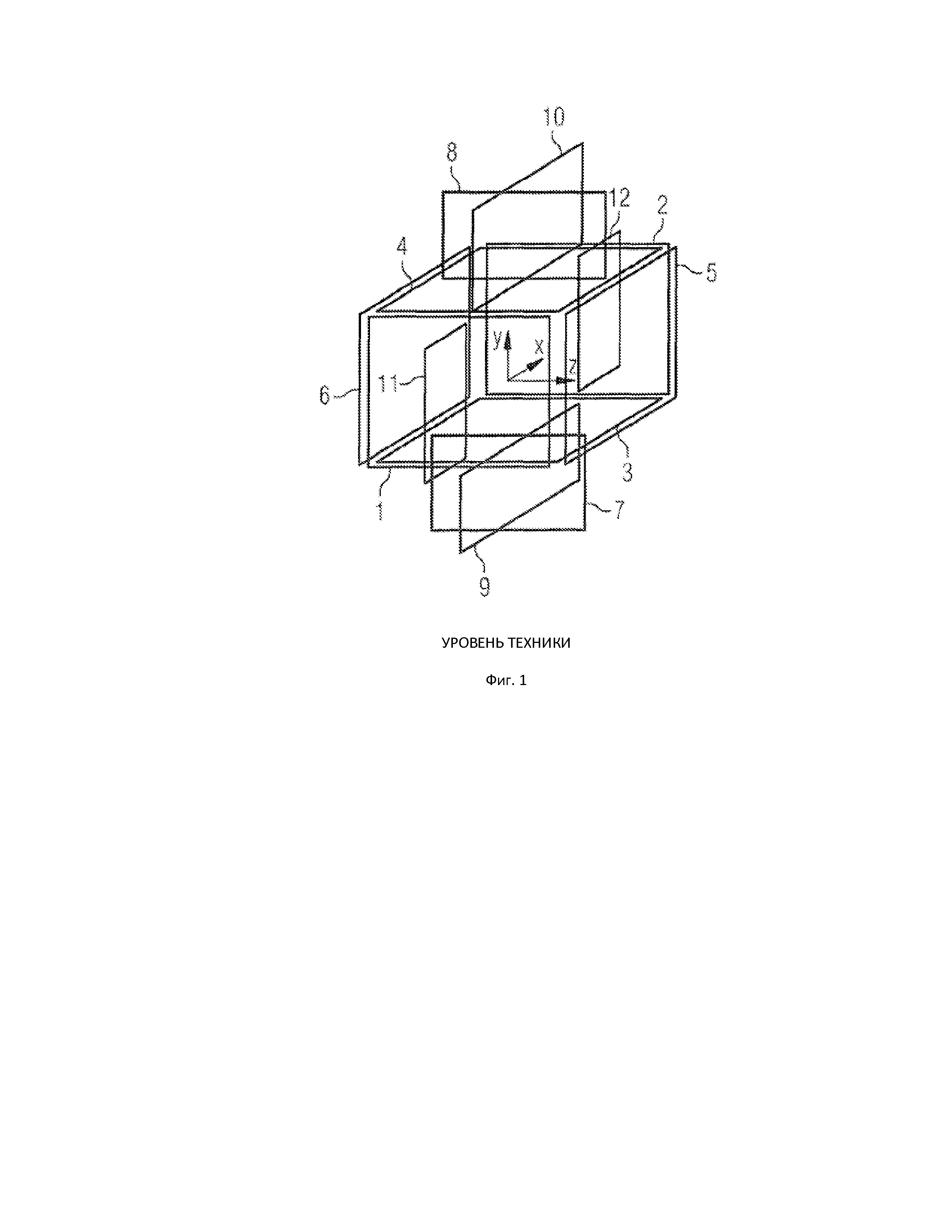
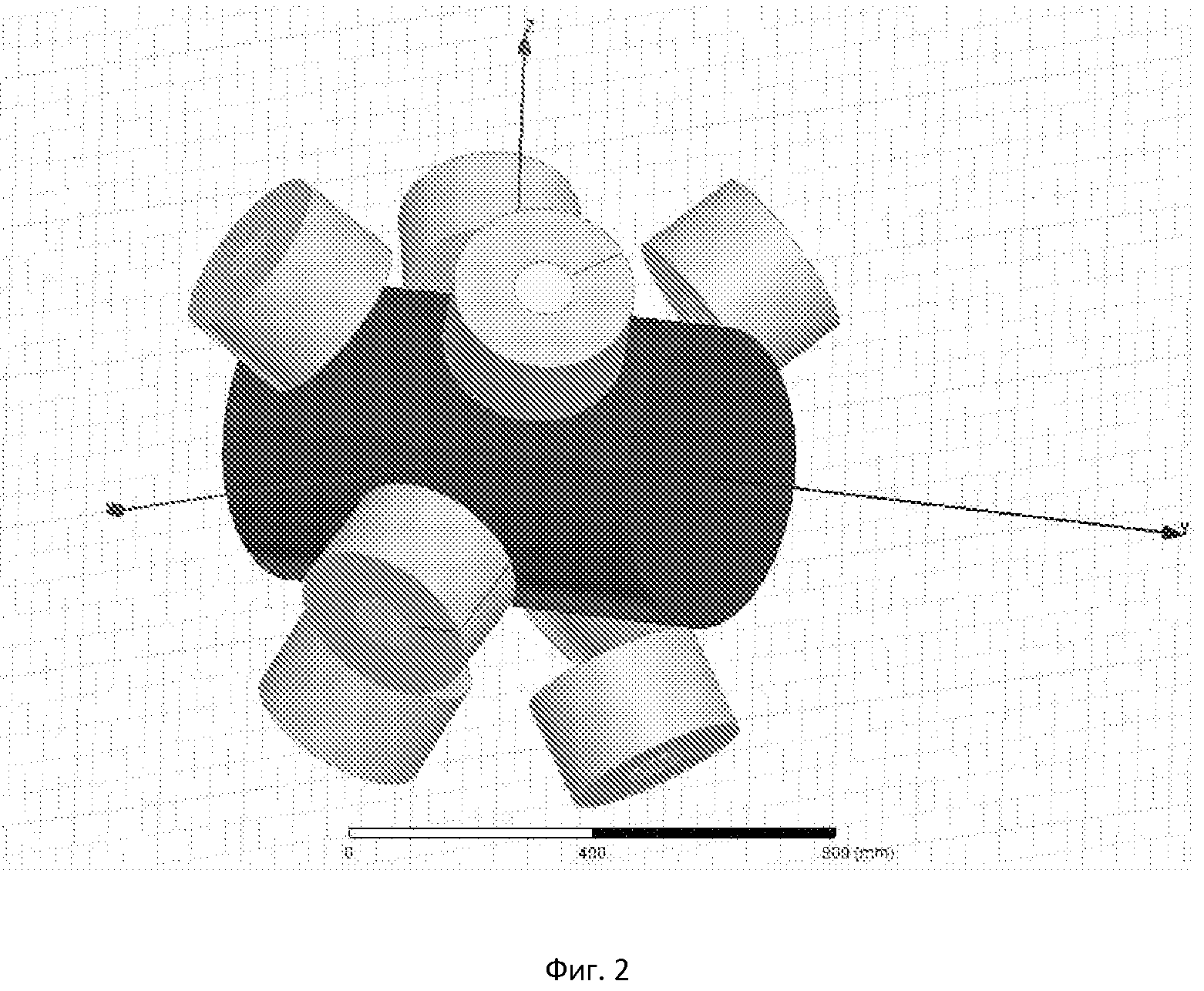
На фиг. 2 изображен прототип магнитной системы, заявляемой в настоящем изобретении, включающей 8 электромагнитных катушек с сердечниками, при подаче тока на которые создается необходимая конфигурация магнитного поля для управления объектом, имеющим намагниченность.
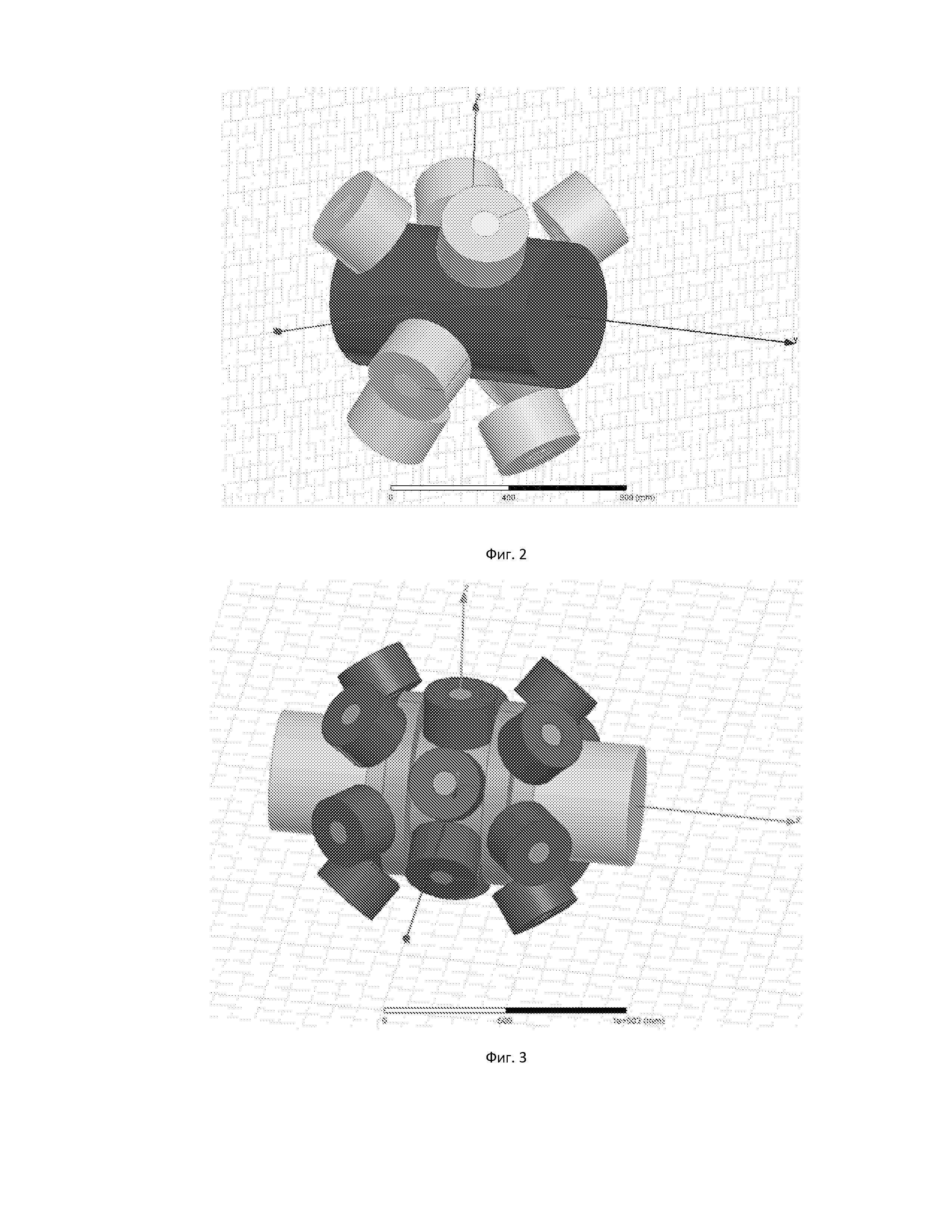
На фиг. 3 изображен прототип магнитной системы, заявляемой в настоящем изобретении, включающей 18 электромагнитных катушек с сердечниками, при подаче тока на которые создается необходимая конфигурация магнитного поля для управления объектом, имеющим намагниченность.
ОПРЕДЕЛЕНИЯ (ТЕРМИНЫ)
В описании данного изобретения термины «включает», «включающий» и «включает в себя» интерпретируются как означающие «включает, помимо всего прочего». Указанные термины не предназначены для того, чтобы их истолковывали как «состоит только из».
Термин "соединенный" означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
В контексте данной заявки термин «необходимая конфигурация магнитного поля» означает, что в каждой точке рабочего объема возможно создать как магнитное поле требуемой величины и направления (в пределах, соответствующих конкретной системе), так и любой градиент магнитного поля (в пределах, соответствующих конкретной системе).
В материалах данной заявки под термином «направление электромагнита» понимают направление оси электромагнитной катушки. В предпочтительных вариантах выполнения используемый в настоящем изобретении электромагнит представляет собой цилиндрическую катушку, намотанную медным проводом. Ось такого цилиндра и задает направление электромагнита.
В контексте данной заявки признак «максимальная приближенность электромагнитных катушек с сердечниками к рабочей области» характеризует минимальное расстояние, на котором возможно расположить электромагнитную катушку с сердечником по отношению к телу пациенту. Предпочтительно, под минимальным расстоянием понимают минимально возможное расстояние от внутреннего торца катушки до границы рабочей области. В случае максимальной приближенности это расстояние равно нулю. Расположение электромагнитных катушек на большем расстоянии заведомо приводит к получению более слабого магнитного поля, и соответственно требуется больший размер заявляемой магнитной системы для получения одного и того же результата.
В материалах данной заявки под термином «максимальная разнонаправленность осей электромагнитных катушек с сердечниками» означает, что должна быть возможность разложить требуемой вектор магнитного поля в данной точке на поля максимального количества электромагнитных катушек. Характеристика разнонаправленности – количество электромагнитных катушек, по векторам магнитного поля которых в конкретной точке можно разложить требуемый вектор магнитного поля. Чем оно больше, тем лучше.
Термин «объект, имеющий намагниченность и находящий внутри тела пациента», в указанной заявке включает любой инородный объект, преднамеренно вводимый в пациента для различных целей, выполненный с возможностью управления внешним постоянным магнитным полем согласно изобретению. Неограничивающие примеры объекта включают эндоскопическую капсулу для диагностики пищевого тракта, медицинский микроробот, лекарственный раствор с магнитными наночастицами, используемыми для адресной доставки к нужной точке организма, для лечения различных заболеваний, микро или наноиглы, сенсор или стимулятор и другие.
Магнитные наночастицы, используемые в терапевтических целях, могут состоять, например, из ферромагнитных, ферримагнитных или суперпарамагнитных материалов, в частности, на основе оксидов железа со структурой шпинели (магнетит, маггемит). Магнитные наночастицы могут применяться для точечной доставки лекарственного препарата при использовании градиента магнитного поля, фокусирующего и притягивающего магнитные наночастицы к нужной точке организма человека.
Медицинские микророботы, функционирующие под управлением внешнего магнитного поля, способны выполнять ряд достаточно сложных работ, включая доставку лекарственных препаратов к месту назначения, проведение микрохирургических операций и выполнение других манипуляций с отдельными клетками организма.
Микро или наноиглы или другие хирургические инструменты по типу лапороскопии, используемые хирургом на микроуровне, могут быть использованы в качестве «объекта» для реализации функции управления движения ими посредством внешнего постоянного магнитного поля.
Используемый в документе термин «пациент» охватывает все виды млекопитающих, предпочтительно человека.
Объект данного изобретения в зависимости от его функционального назначения и выполнения может быть введен в организм пациента перорально, ректально, парентерально, через небольшие (обычно 0,5—1,5 см) отверстия в теле пациента.
Под «областью пространства, окружающей тело пациента» в данной заявке понимают область, размеры которой ограничены масштабом силы источников постоянного магнитного поля для создания требуемой конфигурации магнитного поля в заданной точке.
Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает усовершенствованную компактную энергоэффективную магнитную систему для генерации магнитного поля, вектор которого имеет произвольные контролируемые величину и направление в заранее заданной области пространства, и может быть использовано, в частности, для беспроводного управления движением объекта, имеющего намагниченность, в теле субъекта. Указанная магнитная система имеет существенно сниженные массогабаритные характеристики, а также минимальное энергопотребление.
Для определения минимального энергопотребления был произведен большой объем численного моделирования различных электромагнитных систем с подбором оптимальных параметров магнитной системы для создания магнитного поля и силы заданной величины, а также проводились экспериментальные исследования отдельных составляющих и общей погрешности измерений.
Магнитная система имеет по меньшей мере 8 стационарных электромагнитных катушек с сердечниками, сконфигурированные таким образом, чтобы обеспечить одновременно максимальную приближенность катушек к рабочей области и максимальную разнонаправленность осей катушек к рабочей области.
Указанная система в предпочтительном варианте выполнения имеет сквозной проход для размещения пациента. Предпочтительно, пациент располагается на столе. Конструкция стола может быть различной в зависимости от специфики исследований. Например, стол для пациента магнитной системы может содержать раму с механизмом перемещения и ложе для пациента.
Габариты единичной катушки могут варьироваться в значительных пределах в зависимости от конкретной системы и требований к ней. В предпочтительном варианте осуществления изобретения диаметр и длина катушки лежат в диапазоне от 10 см до 50 см.
Используемые катушки в системе могут быть как идентичны, так и отличаться друг от друга. Выбор электромагнитных катушек зависит от оптимизации конкретной магнитной системы. Направление намотки катушек одинаковы, однако это не принципиально, так как изменение полярности может быть выполнено программно.
Длина используемой магнитной системы ограничивается длиной тела пациента, который будет размещаться внутри нее. Предпочтительно, длина системы составляет 2 м. Предполагается, что система стационарна, а «место локализации» объекта, имеющего намагниченность, находится в центре системы. При этом пациент помещается внутрь таким образом, чтобы интересующая область исследования находилась также в центре системы. Например, при управлении эндоскопической капсулой для исследования ЖКТ пациент располагается таким образом, что центр системы и средняя область туловища совпадали.
Для усиления магнитной индукции применяются сердечники из ферромагнитных материалов, например, таких как феррит.
Электромагнитные катушки могут быть намотаны нитью из волокна на основе углеродных нанотрубок.
Электромагнитные катушки магнитной системы закреплены на дополнительной несущей конструкции.
В некоторых вариантах осуществления несущая конструкция сконфигурирована таким образом, что электромагнитные катушки системы крепятся к ней своей внешней частью. В качестве несущей конструкции используют каркас, к которому крепятся катушки, например, посредством резьбового или сварного соединения. Для охлаждения катушек может применяться водяное или воздушное охлаждение. Параметры системы охлаждения зависят от конкретной магнитной системы.
В некоторых вариантах осуществления магнитной системы сквозной проход системы образован внутренней поверхностью трубы, при этом электромагнитные катушки системы крепятся на внешней поверхности трубы.
На фиг. 2 изображена система из 8-ми электромагнитных катушек с сердечниками, при этом катушки расположены таким образом, чтобы их оси были направлены в центр магнитной системы, а плоскости катушек покрывали бы возможную площадь поверхности вокруг тела пациента. Каждая из катушек имеет внешний диаметр 260 мм с поперечным сечением обмотки 30Х30 мм.
Для данной системы были оценены максимальные значения магнитного поля и силы, действующей на магнитный объект, которые можно получить в исследуемой системе при максимальном значении тока в катушке в 5А. Для этого для нескольких ключевых точек (точек лежащих на периферии рабочего объема и в центре системы) и базовых сочетаний ориентации магнитного объекта и действующей на него силы (исходные вектора) рассчитывался вектор токов – токи в каждой из катушек, необходимые для получения исходных векторов. Затем эти токи подставлялись в каждую из катушек и рассчитывались получающиеся вектора В и F, которые должны совпасть с исходными векторами.
Было выявлено, что при условии, что в каждой из катушек ток не превысит 5 А, внутри рабочего объема можно обеспечить создание магнитного поля величиной в 1 мТл и силы в 1 гс для управления объектом, имеющим намагниченность.
Для создания максимального значения магнитного поля требуемой конфигурации в центре рабочего объема электромагнитные катушки с сердечниками функционально разделены на группы таким образом, что их оси направлены в центр рабочего объема.
На фиг. 3 представлено расположение 18-ми электромагнитных катушек с сердечниками согласно описанной конфигурации. При этом оси центральной группы перпендикулярны продольной оси сквозного прохода; а катушки двух крайних групп размещены максимально близко к катушкам центральной группы и их оси расположены под углом к продольной оси сквозного прохода.
В предпочтительных вариантах осуществления угол между катушками крайних групп и продольной осью сквозного прохода может варьироваться в пределах от 30 до 60 градусов.
Согласно вышеописанным вариантам осуществления различные магнитные поля в рабочем объеме могут генерироваться катушками при синхронной подаче тока в каждую из катушек независимо друг от друга. Подача тока обеспечивается блоком управления, который связан с помощью проводов с каждой из катушек. При подаче тока электромагнитные катушки генерируют компоненты магнитного поля и компоненты градиентов магнитного поля для задания требуемого направления объекта в рабочей области и требуемого усилия, приложенного к объекту.
Были сконфигурированы магнитные системы, состоящие из 8, 18 и 20 катушек с сердечниками (диаметр входного окна 500 мм, диаметр рабочего объема 300мм), и была проведена проверка управляемости объекта, обладающего намагниченностью в указанных системах.
Для каждой из указанных систем максимальных ток рассчитывается исходя из плотности на квадратный миллиметр - j=5 A/мм2. Для нескольких ключевых точек (точек лежащих на периферии рабочего объема и в центре системы) и базовых сочетаний ориентации магнитного объекта и действующей на него силы (исходные вектора) рассчитывался вектор токов – токи в каждой из катушек, необходимые для получения исходных векторов.
Катушки расположены так, чтобы покрыть максимально возможную площадь поверхности вокруг пациента.
Рассчитанные значения токов подставлялись в каждую из катушек, и рассчитывались получающиеся вектора В и F, которые должны совпасть с исходными векторами. В качестве значений для расчета было выбрано значение силы в 10 гс (при единичном магнитном моменте капсулы) и величина поля в 10 мТл.
Для каждой точки и каждой конфигурации векторов поля и силы для всех систем приведены расчетные значения этих векторов, ток в каждой катушке, максимальное значение тока и сумма квадратов токов для расчета мощности, параметры катушек и систем в целом, расчет максимальных значений тока и потребляемой мощности.
Массогабаритных и энергетических характеристик для систем из 8, 18 и 20 катушек с сердечниками приведены в табл. 1.
Табл.1
Исходя из полученных данных для сравнения параметров трех систем видно:
Для всех четырех систем из 8, 18 и 20 катушек можно обеспечить совпадение исходных векторов силы и поля с расчетными в пределах 1%.
По массогабаритным характеристикам более удобной и мобильной является система из 8 маленьких катушек, однако эта система неприемлема по энергетическим характеристикам.
По совокупности результирующих характеристик предпочтение следует отдать системам из 18 и 20 катушек, в первую очередь – из 20 катушек.
Их отличие между собой по энергетике обусловлено неэффективностью создания силы в направлении оси тела пациента катушками, отнесенными от этой оси на радиус рабочего отверстия системы. В ситуации, если требования к силе в данном направлении слабее, чем в поперечном, система из 18 катушек может быть сравнима по энергетике с системой из 20 катушек.
Явный проигрыш в энергетических характеристиках системы из 8 больших катушек связан с тем фактом, что при сохранении простой формы катушки и общей топологии системы (во всех случаях соблюдался принцип, что ось сердечника направлена к центру системы) увеличение диаметра намотки привело к значительному удалению сердечника от рабочей области. Оптимизация модели, а именно создание катушек сложной формы, плотно заполняющих ближайшее к рабочей области пространство, должно существенно снизить энергопотребление, до уровня, сравнимого с потреблением систем из 18 и 20 катушек.
Заявляемая магнитная система обладает хорошими динамическими характеристиками (скорость изменения силовых характеристик создаваемого ими магнитного поля) и возможностью «выключать» или переключать направление внешнего магнитного поля в различном направлении.
Работа устройства представляет собой циклическое выполнение следующих действий:
1. Получение координат объекта, обладающего намагниченностью, в системе координат магнитной системе.
2. Считывание команд с пульта оператора, определение целевых значений векторов магнитной силы, действующей на объект и ее направления.
3. Расчет значений тока для каждой электромагнитной катушки на основе данных, полученных в п. 2-3.
4. Подача тока рассчитанной величины в каждую электромагнитную катушку.
Заявляемая магнитная система может работать в комплексе с другими измерительными системами, в том числе с системой дистанционной подзарядки эндоскопической капсулы, системой определения положения эндоскопической капсулы (в случае использования в качестве управляемого объекта, имеющим намагниченность, эндоскопической капсулы) и другими. При этом частота работы электромагнитных катушек разнесена с частотой работы указанных выше систем для обеспечения совместной работу с минимальным взаимовлиянием.
Дополнительно можно использовать заявляемую магнитную систему в комплексе с другой системой электромагнитных катушек, обеспечивающей создание электромагнитного поля с частотой в диапазоне от 50 до 400кГц, которая используется для лечения онкологических заболевания.
Приведенное описание примерного варианта осуществления дает общее представление о принципах конструирования, функционирования, изготовления и применения устройства, предлагаемого настоящим изобретением. По меньшей мере, один пример из данных вариантов осуществления проиллюстрирован прилагаемыми чертежами. Специалистам в данной области техники очевидно, что конкретные устройства, описанные в настоящем документе и проиллюстрированные на прилагаемых чертежах, представляют собой неограничивающие примерные варианты осуществления, и что объем настоящего изобретения определяется исключительно формулой изобретения. Признаки, проиллюстрированные или описанные в связи с одним примерным вариантом осуществления, можно объединять с признаками других вариантов осуществления. Предполагается, что такие модификации и изменения находятся в пределах объема настоящего изобретения.
Сменный магнитоуправляемый каркас для активной эндоскопической капсулы для проведения обследования желудочно-кишечного тракта
Устройство управления движением инородного тела внутри пациента внешним магнитным полем
Способ ремонта гидравлических двигателей
Способ ремонта гидравлических двигателей
Имплантируемое устройство, управляемое магнитным полем, и способ высвобождения из него лекарства
Устройство для физиотерапевтического магнитотеплового воздействия при профилактике, лечении и патологии проктологических заболеваний
Способ восстановления деталей электрошлаковой наплавкой
Сменный магнитоуправляемый каркас для активной эндоскопической капсулы для проведения обследования желудочно-кишечного тракта
Мотор-колесо транспортного средства и транспортное средство с таким мотор-колесом
Способ лечения злокачественных новообразований с помощью магнитной гипертермии и фармацевтические композиции для применения в указанном способе
Способ определения порога напряжений коррозионного растрескивания стали или сплава при постоянной деформации
Устройство управления движением инородного тела внутри пациента внешним магнитным полем

