Результат интеллектуальной деятельности: ФИТИНГ ДЛЯ ТРУБЫ С ДАТЧИКОМ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет предварительной заявки США № 62/251,853, поданной 6 ноября 2015 г., и предварительной заявки США № 62/232,017, поданной 24 сентября 2015 г., все раскрытие которых включено сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение, в целом, относится к фитингу для текучей среды для механического прикрепления и герметизации трубы, а более конкретно, к беспроводному датчику, прикрепленному к фитингу для текучей среды, и способу его использования.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0003] В целом, один тип фитинга для трубопроводов для текучей среды, таких как патрубки или трубы, включает в себя корпус соединителя, который свободно устанавливается поверх трубопровода для текучей среды, и приводное кольцо, которое сжимает и/или физически деформирует корпус соединителя против внешней поверхности трубопровода для текучей среды для обеспечения одного или нескольких уплотнений и обеспечения сильного механического соединения.
[0004] Обычно, для подтверждения правильной установки фитинга для текучей среды на трубе, были разработаны различные физические контрольные испытания. Например, различные визуальные испытания используются для обеспечения того, что фитинг правильно выровнен и позиционирован на трубе. Могут быть проведены другие инвазивные или не инвазивные испытания, такие как ультразвуковые испытания, рентгеновские лучи или т.п. Однако эти типы испытаний обычно полезны только при фактическом времени установки и могут содержать только косвенные доказательства того, что фитинг правильно установлен на трубе.
[0005] Кроме того, эти испытания, в частности, не дают постоянной информации о состоянии фитинга в течение его полезного срока службы. Часто эти фитинги для текучей среды используются в суровых и кислых средах в присутствии агрессивных технологических текучих сред или газов, таких как сероводород. Например, H2S в присутствии воды может привести к повреждению трубопроводов из углеродистой стали в виде коррозии, растрескивания или вздутия. Воздействие H2S на сталь может привести к растрескиванию под действием напряжений в сульфидсодержащей среде (SSC), растрескиванию под воздействием водорода (HIC) и коррозии.
Наличие диоксида углерода в кислой среде имеет тенденцию к увеличению скорости коррозии в стали. Это может также повысить восприимчивость стали как к SSC, так и к HIC. Эти эффекты могут поставить под угрозу фитинг для текучей среды и трубу.
[0006] Было бы полезно обеспечить датчик и способ использования, которые могут обеспечить информацию о состоянии фитинга для текучей среды во время установки на трубу, а также постоянную информацию в течение полезного срока службы фитинга.
КРАТКАЯ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Ниже представлена упрощенная сущность примера вариантов осуществления изобретения. Эта сущность не предназначена для определения критических элементов или для определения объема изобретения.
[0008] В соответствии с одним аспектом предусмотрен фитинг для текучей среды, который механически прикреплен к трубе, содержащий соединительный корпус, имеющий внутреннюю поверхность, образующую отверстие для приема трубы в нем, по меньшей мере, на одном его конце. Кольцо расположено для установки, по меньшей мере, поверх одного конца соединительного корпуса для механического присоединения упомянутого соединительного корпуса к трубе, и основное уплотнение, образованное на внутренней поверхности соединительного корпуса, для зацепления с трубой. Когда упомянутое кольцо установлено, по меньшей мере, на одном конце соединительного корпуса посредством усилия, кольцо и соединительный корпус прикладывают сжимающее усилие к основному уплотнению, достаточное для обеспечения упругой деформации кольца и остаточной деформации соединительного корпуса и трубы для, тем самым, прикрепления трубы к соединительному корпусу, в некотором смысле, без утечки. Электрически управляемое сенсорное устройство закреплено к поверхности одного из соединительного корпуса или кольца, которое, когда упомянутое кольцо установлено на упомянутом соединительном корпусе, создает электрический параметр в ответ на физическое перемещение упомянутого соединительного корпуса или кольца, к которому сенсорное устройство прикреплено.
[0009] В соответствии с другим аспектом, способ механического прикрепления фитинга для текучей среды к трубе включает этапы, при которых вставляют трубу в один конец фитинга для текучей среды, тем самым, основное уплотнение, образованное на внутренней стороне фитинга для текучей среды, располагается прилегающим к внешней поверхности трубы. Способ дополнительно включает этап, при котором прикрепляют беспроводное электрически управляемое сенсорное устройство, содержащее измеритель деформации, к поверхности фитинга для текучей среды, при этом измеритель деформации создает электрический параметр в ответ на физическое перемещение фитинга для текучей среды. Способ дополнительно включает этап, при котором прикладывают сжимающее усилие к фитингу для текучей среды, достаточное для того, чтобы вызвать остаточную деформацию основного уплотнения против внешней поверхности трубы, тем самым, постоянно закрепляя фитинг для текучей среды к трубе, в некотором смысле, без утечки. Способ дополнительно включает этапы, при которых опрашивают с использованием радиочастотного запросчика, беспроводное электрически управляемое сенсорное устройство, и в ответ на упомянутый опрос, передают от электрически управляемого сенсорного устройства упомянутый электрический параметр, который был получен в ответ на физическое перемещение фитинга для текучей среды после установки постоянно на трубу.
[0010] Следует понимать, что как приведенное выше общее описание, так и последующее подробное описание представляют пример и поясняющие варианты осуществления. Прилагаемые чертежи включены для обеспечения дополнительного понимания описанных различных вариантов осуществления и включены в эту спецификацию и составляют ее часть. Чертежи иллюстрируют различные примеры вариантов осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Вышеупомянутые и другие аспекты настоящего изобретения станут очевидными для специалистов в данной области техники, к которым относится настоящее изобретение, при прочтении следующего описания со ссылкой на прилагаемые чертежи, на которых:
[0012] Фиг.1 схематично иллюстрирует вид в разрезе примера фитинга для текучей среды;
[0013] Фиг.2 схематично иллюстрирует вид в разрезе одного конца примера фитинга по фиг.1, показывающий кольцо, частично установленное на конце корпуса с трубой, расположенной внутри корпуса;
[0014] Фиг.3 представляет собой вид сечения, аналогичный фиг.2, но показывающий кольцо в полностью установленном положении на конце корпуса, и связанную деформацию втулки и трубы;
[0015] Фиг.4 схематично иллюстрирует частичный вид в перспективе примера кольца с прикрепленным к нему датчиком; а также
[0016] Фиг.5 представляет собой вид спереди примера фитинга для текучей среды с различными примерами датчиков, прикрепленных к нему.
ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
[0017] Примеры осуществления описаны и проиллюстрированы на чертежах. Эти проиллюстрированные примеры не предназначены для ограничения по настоящему изобретению. Например, один или несколько аспектов могут быть использованы в других вариантах осуществления и даже в других типах устройств. Более того, определенная терминология используется здесь только для удобства и не должна рассматриваться как ограничение. Кроме того, на чертежах используются одинаковые ссылочные позиции для обозначения одинаковых элементов.
[0018] Обращаясь к показанному примеру на фиг.1, пример фитинга 10 может использоваться для соединения любых тонкостенных или толстостенных труб, имеющих размеры в диапазоне от 1/4 NPS до 4 NPS, хотя другие размеры трубы могут также извлекать выгоду из примера фитинга 10. Пример фитинга 10 включает в себя заданные соотношения взаимодействия между приводным кольцом 14 (иногда называемым «обжимным кольцом»), корпусом 12 и трубой 16 вдоль длины цилиндрической контактной области. Пример фитинга 10 может быть установлен на трубах 16. Соединительный корпус 12 и приводное кольцо 14 вместе используются для соединения тела 16 трубы с фитингом 10. Компоненты, как правило, являются симметричными относительно центральной оси или продольной оси L. Показанный пример представляет собой фитинг 10, имеющий два противоположных конца, причем каждый конец выполнен с возможностью приема тела 16 трубы в нем. Соответственно, в показанном примере имеются два приводных кольца 14, хотя понятно, что фитинг может быть выполнен с возможностью приема только одной трубы через один конец. Различные примеры фитингов показаны в общепринятых патентах США №№ 8,870,237; 7,575,257; 6,692,040; 6,131,964; 5,709,418; 5,305,510; и 5,110,163, которые полностью включены в настоящее описание посредством ссылки во всей их полноте.
[0019] Ссылаясь к фиг.2, приводное кольцо 14 показано частично установленным или предварительно собранным на втулке 12b соединительного корпуса 12 в предварительно установленном положении. В этом положении, приводное кольцо примыкает к расширенному участку, но слегка отстоит относительно участка основного уплотнения. Посредством посадки с натягом, приводное кольцо 14 поддерживается и может быть отправлено клиентам в предварительно установленном положении на соединительном корпусе 12, что облегчает простоту использования и установку розничными конечными пользователями.
[0020] Вообще говоря, установка фитинга 10 на трубе или патрубке вызывает остаточную необратимую деформацию трубы или патрубка, с которой он соединен, обеспечивая уплотнение металл-металл между трубой/патрубком и корпусом фитинга. Фитинг может включать в себя одно или несколько уплотнений, таких как любое из основного уплотнения 30, внутреннего уплотнения 32, внешнего уплотнения 34 и т.д. Когда приводные кольца 14 в осевом направлении вставлены на соответствующие втулки 12а, 12b с участками 16 трубы, принятыми в них, втулки 12а, 12b становятся механически соединенными с и уплотненными с участками патрубка или трубы. Обжимное или приводное кольцо 14 имеет размеры, которые должны быть кольцеобразно приняты поверх и в осевом направлении вставлены с усилием вдоль втулки 12а для действия уплотнений 30, 32, 34 для закусывания в трубу 16 для уплотнения и механического соединения корпуса 12 с трубой 16.
[0021] Установка уплотнения означает, что зуб или зубцы уплотнения (уплотнений) обжимают или вдавливаются в деформирующий контакт с трубой 16. Осевое перемещение приводного кольца поверх соединительного корпуса 12 посредством посадки с натягом, прикладывает сжимающее усилие, которое обжимает корпус на поверхности трубы или патрубка, сжимая стенку трубы/патрубка, сначала упруго (т.е. непостоянно), а затем пластически (т.е. постоянно). Эти контактные напряжения являются достаточно высокими, чтобы пластически деформировать поверхность трубы/патрубка под уплотняющими площадками, образуя 360° кольцевое, постоянное уплотнение металл-металл между трубой/патрубком и соединительным корпусом 12.
[0022] Установка уплотнения считается полной (то есть полностью установленной), когда зуб или зубцы уплотнения полностью вдавлены в деформирующий контакт с трубой 16 (например, когда внешняя поверхность 17 трубы 16 непосредственно напротив уплотнений 30, 32, 34 не имеет дальнейшего радиального перемещения в результате вдавливания внутрь посредством конкретного участка приводного кольца 14). В качестве альтернативы, полная установка уплотнения (уплотнений) может быть образована, когда приводное кольцо 14 вдавило зубец или зубцы уплотнения наиболее далеко в трубу 16, или когда воздействующий конус приводного кольца 14 выравнивается с диаметрально постоянным цилиндрическим участком, когда приводное кольцо 14 проходит мимо уплотнения. Труба 16 обычно становится напряженной за пределами ее предела упругости, поскольку уплотнения 30, 32, 34 продолжают закусываться в поверхность, и труба 16 начинает пластически деформироваться или перемещаться радиально внутрь, что приводит к остаточной деформации. Зубья уплотнений 30, 32, 34 закусываются в и деформируют внешнюю поверхность 17 трубы 16 и сами могут быть несколько деформированы. Это позволяет заполнить любые грубые или неравномерные дефекты поверхности, находящиеся с внешней стороны трубы 16.
[0023] Ссылаясь к фиг.3, для полной установки приводного кольца 14 на втулку 12b с введенной в нее трубой 16 для целей механического соединения и уплотнения фитинга 10 с трубой 16, может быть использовано установочное приспособление (не показано) для дополнительного проталкивания приводного кольца 14 на втулку 12b по направлению к зацепляющему фланцу 20 инструмента. Осевое перемещение приводного кольца 14 на соединительный корпус 12 с вставленной в него трубой 16 вызывает радиальное перемещение корпуса 12 и, в частности, уплотнений корпуса 12 к или на трубу 16 для создания уплотнений и механических соединений с ним. Кроме того, труба 16 деформируется, и соединительный корпус 12 деформируется. Как можно видеть из сравнения фигур 2-3, области перекрытия между корпусом 12 и кольцом 14 требуют определенного типа деформации или закусывания. Для того чтобы кольцо перемещалось мимо корпуса в этой области перекрытия, либо зубцы уплотнения должны закусываться в трубу 16, либо труба 16 должна деформироваться, и/или кольцо 14 и/или корпус 12 должны деформироваться.
[0024] Приводное кольцо 14 вдавливается в осевом направлении в тело втулки 12а для окончательно установленного положения. В этом положении приводное кольцо 14 примыкает или входит в зацепление с телом фланца 20. В качестве альтернативы, приводное кольцо 14 может быть расположено близко прилегающим к фланцу 20 без контакта с ним. Одновременно с радиальным перемещением корпуса 12 и деформацией трубы 16, радиальное перемещение приводного кольца 14 происходит наружу. Эта радиальная деформация приводного кольца 14 обычно является упругой и приводит к небольшому увеличению диаметра приводного кольца 14.
[0025] Внутренний размер приводного кольца 14 является таким, что, когда кольцо вставлено с усилием на втулку, втулка сжимается радиально на достаточное расстояние, чтобы не только сжать втулку против трубы, но и достаточно сжать втулку, чтобы нижележащая под втулкой труба также сжималась радиально. Напряжение внутри приводного кольца никогда не должно превышать предела упругости материала, образующего приводное кольцо. Радиальное расширение, которое имеет место, находится внутри пределов упругости материала, в результате чего упругое усилие поддерживается против втулки и трубы. Действительно, из-за металлургической природы металлического соединения посредством обжимного действия, существенное изменение физических свойств приводного кольца должно быть четко измерено посредством подходящего датчика. Предпочтительно, используется датчик с электрическим управлением, который создает электрический параметр, который включает электрически определяемый параметр, в ответ на физическое перемещение устройства, к которому прикреплено сенсорное устройство.
[0026] Например, когда приводное кольцо нажимает на взаимно соединяющуюся трубу, приводное кольцо может испытывать рабочее напряжение около 20000 фунтов на квадратный дюйм и упруго деформироваться и расширяться примерно на 1,5 мил (1 мил равен 1 тысячной дюйма). С большинством подходящих материалов, пластическая деформация является измеримой, но минимальной, и между трубой, втулкой и приводным кольцом существует упругий баланс, который имеет тенденцию повышать надежность соединения. В некоторых примерах, электрический параметр сенсорного устройства может быть получен в ответ на упругую деформацию приводного кольца или даже в ответ на пластическую деформацию корпуса 12 или трубы 16.
[0027] Физическое напряжение 15 в материале приводного кольца 14 из-за его упругого расширения во время установки, обозначается деформацией, которая может быть измерена датчиком. Как обсуждалось выше, эта обнаруживаемая деформация непосредственно связана с напряжением/деформацией, возникающей в результате деформации корпуса 12 и/или трубы 16. В целом, измеритель деформации измеряет изменение в расстоянии между двумя активными пятнами, и поэтому может использоваться для обнаружения изменений в приводном кольце или соединительном корпусе, которые возникают в результате установки фитинга для текучей среды на трубе. В зависимости от используемого датчика деформации, и ориентации его чувствительного к деформации элемента, определяемое физическое напряжение приводного кольца может быть любым из кольцевого напряжения или окружного напряжения, осевого напряжения, или радиального напряжения. Дополнительно предполагается, что их комбинация может быть обнаружена. Одной из общих методик измерения является сквозное использование датчика, содержащего одноосевой или много осевой измеритель деформации. Измеритель деформации, иногда называемый тензометрическим измерительным преобразователем, для металлических структур обычно представляет собой устройство резистивной металлической пленки. В одном примере тензометрический измерительный преобразователь может быть прикреплен к металлической диафрагме, которая изгибается (деформируется) в результате приложенного напряжения (в результате расширения или сжатия материала) в измеряемом объекте. Эти измерительные преобразователи обычно вызывают небольшое изменение электрического сопротивления в ответ на перемещение (деформацию) структуры, к которой они прикреплены, которая часто является металлом. Еще, датчик деформации может указывать воспринятую деформацию посредством изменения полного сопротивления, проводимости или другой обнаруживаемой характеристики или состояния. Могут использоваться различные типы датчиков деформации, в том числе полупроводниковые измерители деформации (иногда называемые пьезорезисторами), емкостные измерители деформации и т.д. Следует понимать, что электрический параметр или электрически определяемый параметр будет соответствовать тому, который получается или связан с конкретным типом используемого сенсорного устройства.
[0028] Обычно такие измерители деформации соединены с электронным считывающим устройством посредством физических проводов или тому подобного. Однако для простоты использования, установки и надежности, было бы очень полезно использовать бесконтактный беспроводной измеритель деформации. Могут использоваться различные бесконтактные беспроводные исполнения измерителя деформации, такие как система RFID (радиочастотной идентификации). Один такой беспроводной измеритель деформации, который может быть использован, описан в патенте США № 9378448 («патент 448»), который полностью включен в настоящее описание посредством ссылки во всей его полноте. Следует принять во внимание возможность использования одно или многоэлементных измерителей деформации. Одноэлементный измеритель деформации может использоваться с тензометрическим измерительным преобразователем, выровненным вдоль желаемой оси, которая должна быть воспринята. В качестве альтернативы, многоэлементный измеритель деформации может быть 2 или 4 средством измерения, расположенным на 180 или 90 градусов друг от друга, чтобы минимизировать перекрестные помехи изгиба и повысить точность.
[0029] В целом, метки RFID включают в себя микрочип или интегральную схему, используемую для восприятия, передачи и/или хранения информации. Внешний приемопередатчик/запросчик/считыватель 100 (например, считыватель RFID), расположенный в непосредственной близости или удаленно относительно метки RFID, используется для беспроводного приема информации и/или передачи информации в метку RFID. Метка RFID обычно включает в себя антенну, которая передает радиочастотные сигналы, относящиеся к идентификации, и/или информации, хранящейся в метке RFID. Следует принять во внимание, что могут использоваться несколько меток RFID, которые должны считываться запросчиком. Например, использование нескольких меток RFID может быть полезно для обеспечения нескольких ракурсов, с которых запросчик может опросить метки RFID, для приема нескольких показаний в разных положениях объекта, подлежащего восприятию, и/или может обеспечить избыточность в случае, когда повреждена одна или несколько меток RFID. Запросчик 100 также используется для обеспечения мощности для метки RFID полностью или частично, посредством чего приемопередатчик беспроводной связи RFID пассивно питается электромагнитным полем от запросчика. То есть схема метки RFID питается от электромагнитной энергии, передаваемой от запросчика 100.
[0030] Запросчик 100, в целом, выполнен с возможностью зондирования или опроса метки RFID и обычно включает в себя передатчик и приемник для обмена информацией с меткой RFID. В ответ на такой опрос, метка RFID обычно передает возвращаемую информацию запросчику. Кроме того, предполагается, что может происходить двусторонняя связь, при которой опрос метки RFID может передавать информацию от запросчика, которая должна быть получена, сохранена или воздействовать на метку RFID; наоборот, метка RFID может передавать возвращаемую информацию обратно запросчику. Запросчик может также включать в себя процессор для приема RF данных от метки RFID и экстраполяции RF данных в значащую информацию, посредством чего идентификация или другая фиксированная или сохраненная информация может быть воспринята пользователем. В некоторых вариантах осуществления, запросчик может быть интегрирован с компьютерной системой. Запросчик, предпочтительно, имеет встроенную не кратковременную компьютерную память для хранения принятых данных для последующего поиска, анализа или передачи. Кроме того, запросчик, предпочтительно, способен осуществлять связь в локальной сети (LAN) или глобальной сети (WAN), включая Интернет и всемирную сеть. Предпочтительно, сам запросчик способен осуществлять беспроводную передачу данных, например, через Wi-Fi, Bluetooth, NFC, сотовую (аналоговую или цифровую, включая все прошлые или настоящие итерации) или другие подобные технологии. Дополнительно, запросчик, предпочтительно, имеет программируемый микропроцессор, который может включать в себя различные функции и возможности. Например, микропроцессор включает в себя программируемое вычислительное ядро, которое способно выполнять любую или все команды обработки, производить вычисления, отслеживать/считывать данные, хранить данные, анализировать данные, корректировать/обрабатывать данные, получать новые команды или инструкции и т.д.
[0031] Обращаясь к фиг.4, показан один вариант осуществления беспроводного электрически управляемого сенсорного устройства, в котором сенсорное устройство 50 приложено к внешней поверхности 40 приводного кольца 14. Как будет описано здесь, сенсорное устройство 50 может быть использовано для определения любых или всех свойств, положения и состояния фитинга 10 для текучей среды, а также качества крепления между фитингом для текучей среды и трубой. Использование сенсорного устройства 50 особенно полезно во время процедуры установки фитинга 10 для текучей среды на трубе 16 для указания, что уплотнение завершено (то есть полностью установлено), и что произошло приемлемое притягивание. Таким образом, использование сенсорного устройства 50 для получения данных в режиме реального времени может уменьшить или устранить необходимость в проверках после установки.
[0032] Предполагается, что сенсорное устройство 50 может быть прикреплено к различным частям фитинга 10, внутри или снаружи, включая корпус 12 и приводное кольцо 14. Сенсорное устройство 50 также может быть соединено с трубой 16 как внутри, так и снаружи и может потенциально подвергаться воздействию текучей среды, переносимой трубой. Предполагается, что сенсорное устройство 50 может быть расположено по-разному на трубе, хотя предпочтительным является расположение, относительно близкое к установленному фитингу 10 (например, предпочтительно, непосредственно прилегающее). Нагрузка или нагрузочная деформация в трубе, которая может быть вызвана весом текучей среды, переносимой внутри трубы, или установочная нагрузка трубы в зависимости от того, как установлена труба, или структурные нагрузки, могут быть легко отображены обнаруживаемой деформацией в трубе. Такое сенсорное устройство, расположенное рядом с фитингом 10, может использоваться для понимания или экстраполяции величины напряжения или деформации, реализуемых фитингом 10 путем нагрузки трубы, что может помочь указать состояние или ожидаемое/прогнозируемое состояние целостности уплотнения, поддерживаемого установленным фитингом 10. В одном примере, по меньшей мере, одна внешняя поверхность сенсорного устройства 50 имеет гибкое одностороннее клеящее вещество для прикрепления сенсорного устройства 50 к внешней стороне приводного кольца. В качестве альтернативы, может использоваться нанесенный снаружи клей или тому подобное. Из-за действия обжатия при установке, сенсорное устройство 50 может не быть установлено на внутренней стороне приводного кольца или внешней стороне корпуса в местах, где эти две поверхности наносят ущерб, поскольку сенсорное устройство, вероятно, будет раздавлено, подвергнуто воздействию, и т.д. Тем не менее, может быть возможным расположение сенсорного устройства в небезопасных местах или даже в месте нанесения ущерба, если датчик помещен в карман, выемку или другое защищенное место. В первом варианте осуществления, сенсорное устройство 50 может иметь гибкую конструкцию, которая соответствует форме инструмента или объекта, к которому оно прикреплено (например, приводного кольца, соединительного корпуса или даже трубы). Желательно, чтобы гибкое сенсорное устройство 50 было выполнено с возможностью сцепления с изогнутыми и/или изменяющимися поверхностями, такими как внешняя цилиндрическая периферия приводного кольца, внутренняя часть корпуса 12 или даже трубы 16. Предполагается, что гибкое сенсорное устройство 50, включающее гибкую подложку, гибкую плату/начертание и при желании гибкую батарею, может быть растянуто, сморщено, согнуто или изогнуто без его разрушения. Гибкое беспроводное RFID сенсорное устройство 50 может быть меткой RFID, которая включает в себя гибкую подложку с гибкой схемой (напечатанной или протравленной или ламинированной), антенну 52, интегральную схему 54, способную взаимодействовать с протоколами беспроводной связи (например, RFID, Bluetooth, NFC, RFID или др.), используя встроенную или отдельную коммуникационную микросхему, и способную взаимодействовать со встроенным датчиком 56 (или даже отдельным датчиком) для получения показаний деформации и сохранения этих показаний и связанных со временем данных показания во встроенной не кратковременной памяти. Различные примеры памяти для хранения информации могут быть стираемой, программируемой, доступной только для чтения памятью (EPROM), жестко закодированной энергонезависимой внутренней памятью, или различными другими системами чтения/записи. Также могут быть включены дополнительные датчики, такие как датчики температуры, датчики состояния окружающей среды (давления, влажности, света и т.д.), измерители ускорения, вибрации и т.д. В одном примере RFID измеритель деформации по патенту 448 может быть сконфигурирован как гибкая плата, включающая некоторые или все вышеупомянутые элементы. Сенсорное устройство 50 может включать в себя еще больше функций, таких как переключатель 57 и/или устройство 58 обратной связи (источники света, дисплеи, или динамики и т.д.).
[0033] Как отмечено здесь, фитинги для текучей среды по заявке, рассматриваемой в данный момент, часто используются в промышленных условиях и могут подвергаться воздействию суровых, опасных и кислых сред. Механическое и окружающее воздействие, испытываемое трубопроводным оборудованием во время установки, хранения и эксплуатации, может повредить внешние метки RFID, что делает внешние метки неоперабельными. То есть, метки могут быть раздавлены или отключены от оборудования во время обработки, установки и т.д., и/или могут со временем ухудшаться из-за воздействия жестких условий.
[0034] Таким образом, предпочтительно, чтобы после того, как RFID сенсорное устройство 50 прикреплено к приводному кольцу 14, корпусу 12 или другому объекту, защитный покрывающий материал 60 наносился поверх метки RFID для герметизации и изоляции сенсорного устройства от внешней среды. Например, защитный покрывающий материал 60 наносится поверх метки RFID на внешнюю поверхность 40 приводного кольца 14 или другого объекта. Защитный покрывающий материал 60 выбирается так, чтобы его можно было легко нанести на приводное кольцо 14 и обеспечить тонкое покрытие, которое защищает нижележащее RFID сенсорное устройство 50 от механического и окружающего ущерба. Предпочтительно, защитный покрывающий материал 60 существенно не увеличивает радиальную толщину трубы. В различных примерах, RFID сенсорное устройство 50 и защитный покрывающий материал 60 могут быть выбраны для использования в условиях высокой температуры и/или высокого давления и могут, преимущественно, обеспечивать читаемость, легкую установку и упаковку, стойкую к механическим и химическим нагрузкам, даже в суровые условия. Покрывающий материал 60, предпочтительно, является также устойчивым к напряжению/деформации, которое возникает во время установки фитинга 10 на трубе. Когда сенсорное устройство 50 прикреплено к трубе 16 и подвергается воздействию текучей среды в ней, также предпочтительно, чтобы защитный покрывающий материал 60 герметизировал сенсорное устройство 50 от текучей среды, чтобы препятствовать контакту между ними.
[0035] Защитный покрывающий материал 60 может быть подвергнут шлифованию, прокатке или распылению на гибкое сенсорное устройство 50 и приводное кольцо 14, хотя может быть использовано любое подходящее средство для размещения относительно однородного тонкого слоя защитного покрывающего материала 60. В одном варианте осуществления, защитный покрывающий материал 60 может быть уретановым покрытием, хотя могут быть также пригодны другие материалы, такие как нитрил, витон, эпоксидная смола и т.д. В других вариантах осуществления защитный покрывающий материал 60 может представлять собой гибкую пластиковую подложку или тому подобное, с чувствительным к давлению клеем, который помещается поверх сенсорного устройства 50 в виде покрытия. Разумеется, защитный покрывающий материал 60 должен быть радиопрозрачным для радиочастотного сигнала, чтобы обеспечить использование RFID системы связи. Может быть предпочтительным сузить осаждение защитного покрывающего материала 60 так, чтобы он являлся самым толстым по окружности приводного кольца 14, непосредственно покрывая RFID сенсорное устройство 50, и сужался на концах полосы нанесения, чтобы быть относительно тоньше.
[0036] Как обсуждалось выше, беспроводной измеритель деформации может быть выполнен гибким образом для нанесения на внешнюю поверхность фитинга. Однако также предполагается, что беспроводной датчик RFID также может быть воплощен в частично гибкой или даже негибкой плате, которая косвенно прикреплена к соединительному корпусу, приводному кольцу и/или трубе через промежуточное звено. Например, как представлено схематично на фиг.5, держатель 80 датчика может быть вставлен между сенсорным устройством 50 (или защитным покрывающим материалом 60) и элементом, подлежащим восприятию. Понятно, что представление на фиг.5 является лишь одним примером, и может даже рассматриваться как преувеличенное представление в некоторых примерах установки. Держатель 80 датчика может соответствовать и прикрепляться непосредственно к внешней или внутренней поверхности соединительного корпуса, приводного кольца и/или трубы. Держатель 80 датчика может включать в себя сторону 82 крепления, имеющую кривизну или другую геометрию, которая соответствует внешней или внутренней периферии соединительного корпуса, приводного кольца и/или трубы, и противоположную сторону 84 датчика, к которой сенсорное устройство 50B прикрепляется. Сторона 82 крепления держателя 80 датчика, предпочтительно, жестко прикреплена к внешней или внутренней части соединительного корпуса, приводного кольца и/или трубы, так что показания датчика деформации будут непосредственно восприниматься сенсорным устройством 50В. Возможно, держатель 80 датчика может включать сквозное отверстие 86, углубление или другое отверстие для обеспечения прямого доступа к поверхности объекта, подлежащей восприятию, так что датчик 56 измерителя деформации может быть непосредственно прикреплен к внешней поверхности. Например, как схематично показано на фиг.5, измеритель 54В деформации может быть непосредственно прикреплен к внешней поверхности 40 кольца 14 через отверстие 86, в то время как большая часть сенсорного устройства 50B поддерживается держателем 80 датчика. Измеритель 54В деформации может быть расположен непосредственно на подложке схемы сенсорного устройства 50, или может быть отделен подходящим электропроводящим проводником. Когда сенсорное устройство 50 является жестким, или только частично гибким, сенсорное устройство 50 может быть прикреплено к кольцу 14 тангенциально, так что датчик 56 измерителя деформации находится в контакте с внешней поверхностью 40, а держатель 80 датчика может действовать в качестве разделителя для поддержки баланса сенсорного устройства 50 над изогнутой внешней поверхностью 40. Что касается тангенциальной установки сенсорного устройства 50, изображение на фиг.5 является схематичным и может считаться преувеличенным. Например, с тангенциальной установкой, держатель 80 датчика может быть тоньше, чем показано, так что измеритель 54В деформации (который может переноситься на подложке схемы) легко контактирует с внешней поверхностью 40, при этом держатель 80 датчика принимает на себя разность между нижней поверхностью подложки схемы (или защитным покрывающим материалом 60) и внешней поверхностью 40. Действительно, предполагается, что когда измеритель 54B деформации расположен где-то посредине сенсорного устройства (например, расположен где-то между двумя концами подложки схемы), может быть использовано подходящее отверстие 86, или даже более чем один держатель 80 датчика (или держатель 80 датчика, состоящий из двух отдельных частей), может использоваться (например, одна поддерживающая каждый конец сенсорного устройства 50 над внешней поверхностью 40). Кроме того, предполагается, что тангенциальная установка может возникать в конфигурации, в соответствии с которой измеритель 54В деформации расположен к одному концу сенсорного устройства (например, расположен к концу или на конце подложки схемы). В этой ситуации, которая может быть похожа на консольную установку, держатель 80 датчика может использоваться для поддержки противоположного конца сенсорного устройства 50 над внешней поверхностью 40. Конечно, держатель 80 датчика может быть легко адаптирован для поддержки сенсорного устройства 50 в зависимости от конфигурации установки.
[0037] Сторона 82 крепления может быть съемно или, предпочтительно, несъемно прикреплена посредством клейких веществ, механических крепежных элементов и т.д. Благодаря использованию промежуточного держателя 80 датчика, одно сенсорное устройство 50В может быть применено к различным фитингам 10 для текучей среды, имеющим разные геометрии, просто путем изменения держателя 80 датчика. Такая конфигурация обеспечивает высокоэффективную и экономичную конструкцию. Кроме того, держатель 80 датчика может использоваться для смещения или подъема сенсорного устройства 50В от периферийной поверхности фитинга для текучей среды, что может быть особенно полезно, когда контролируемый фитинг находится в труднодоступном месте или будет мешать другим близлежащим объектам. Таким образом, массив держателей 80 датчиков обеспечивает множество вариантов установки для одного датчика.
[0038] Сенсорное устройство 50В затем прикрепляется к стороне 84 датчика держателя 80 датчика. Сенсорное устройство 50В может быть предусмотрено на частично гибкой или жесткой подложке (например, на твердой обычной печатной плате), что может упростить изготовление, и может дополнительно повысить точность встроенных датчиков. Сторона 84 датчика держателя 80 датчика может быть плоской, изогнутой или даже содержать карман или углубление для приема сенсорного устройства.
[0039] В еще одном варианте осуществления, держатель 80 датчика может обеспечить пространство для подключения более одного датчика. Например, сторона 84 датчика может обеспечивать два или несколько бок о бок местоположений для установки нескольких датчиков в различных конфигурациях (параллельных, перпендикулярных, угловых, разных высотах и т.д.). Таким образом, держатель 80 датчика также может действовать как направляющая для последовательной установки сенсорного устройства 50В на месте.
[0040] Сенсорное устройство 50В также может быть заключено в оболочку или инкапсулировано в защитный покрывающий материал 60В, который является радиопрозрачным для радиочастотного сигнала. Покрывающий материал 60B может быть несъемным, таким как различные типы, обсуждаемые здесь, или может быть даже съемным контейнером с закрепленным в нем сенсорным устройством 50В. В одном съемном примере, когда сторона 84 датчика держателя 80 датчика содержит карман или углубление для приема сенсорного устройства 50В, защитный покрывающий материал 60В может быть жесткой физической верхней крышкой, которая закреплена на стороне 84 датчика для закрытия кармана или углубления. Верхняя крышка может включать прокладку или другое уплотнение для защиты сенсорного устройства 50В от окружающей среды. При желании, съемная верхняя крышка обеспечивает возможность удаления, ремонта или замены сенсорного устройства с течением времени.
[0041] Беспроводной датчик RFID может даже быть встроен или иным образом прикреплен непосредственно в карман 90, углубление, отверстие или другое внутреннее пространство соединительного корпуса, приводного кольца и/или трубы. Например, как показано на фиг.5, карман 90 может быть площадкой плоского пятна или иным образом образован во внешней периферии соединительного корпуса, приводного кольца и/или трубы для обеспечения требуемого места установки датчика. Таким образом, карман 90 может обеспечивать относительно плоское пятно (то есть, плоское по сравнению с иным образом изогнутой внешней периферией) для установки сенсорного устройства 50С, которое может быть полезно для измерителя деформации с частично гибкой или негибкой платой. Также предполагается, что карман, углубление, отверстие и т.д. могут быть полезны для указания того, где должно быть установлено сенсорное устройство 50, чтобы были получены согласованные и требуемые показания датчика. Карман может быть ориентирован радиально или в осевом направлении, или даже под косым углом относительно центральной оси фитинга для текучей среды. Дополнительно предполагается, что карман 90, углубление, отверстие и т.д. может быть образован на конце соединительного корпуса, приводного кольца, и/или трубы, и может продолжаться в осевом направлении на расстояние в нем. Таким образом, сенсорное устройство может быть вставлено осевым образом в карман 90, углубление, отверстие и т.д. Возможно, может быть применен защитный покрывающий материал 60С, который является радиопрозрачным для радиочастотного сигнала метки RFID и запросчика, такого типа, как описанный ранее, или даже жесткая покрывающая пластина или тому подобное. Если используется защитная пластина, она может действовать в качестве наполнителя, чтобы вернуть объединенное устройство обратно в его номинальную форму, как если бы не было ни кармана 90, ни углубления, ни отверстия и т.д. (т.е. внешний вид установленной крышки, в установленном состоянии, может быть, в целом, заподлицо с периферией соединительного корпуса, приводного кольца и/или трубы). Крышка может быть съемной или несъемной с помощью клея, механических крепежных деталей, зажимов и т.д.
[0042] Предпочтительно, RFID сенсорное устройство 50 получает всю свою электроэнергию для работы по радиочастотному сигналу от запросчика. Однако, сенсорное устройство 50 может быть полуактивным или полностью активным устройством со встроенным источником 59 питания, таким как миниатюрный элемент питания, или предпочтительно, гибкая печатная батарея. Такое активное устройство может обеспечить больший диапазон беспроводной связи для связи с RFID запросчиком, активный протокол связи (Bluetooth, Wi-Fi, сотовый, акустический, оптический, инфракрасный и т.д.), активную обработку данных встроенного компьютера, звуковую или визуальную обратную связь с пользователем через источник света, дисплеи или динамики и т.д.
[0043] Сенсорное устройство 50 может быть приложено в разных местах вдоль продольной оси L фитингов для текучей среды (то есть корпуса 12, приводного кольца 14). Предпочтительно, чтобы сенсорное устройство 50 находилось в области, которая испытывает относительно высокое напряжение в установленном состоянии, или в точках потенциального отказа. Во многих случаях такое местоположение можно найти вблизи или выровненным с одним из основного уплотнения 30, внутреннего уплотнения 32 и/или внешнего уплотнения 34. Например, как представлено на фиг.3, физическое напряжение 15 в материале приводного кольца 14 из-за его упругого расширения во время установки является относительно высоким в положении над расположением основного уплотнения 30, поскольку это является местом высокой деформации втулки 12b и трубы 16. Таким образом, сенсорное устройство 50 может быть расположено, в целом, выровненным по вертикали с основным уплотнением 30 относительно продольной оси фитинга. Более конкретно, по меньшей мере, датчик 56 измерителя деформации может быть расположен, в целом, выровненным по вертикали с основным уплотнением 30. Тем не менее, желаемое положение сенсорного устройства 50 может быть определено путем исследования или опыта с каждым конкретным фитингом для текучей среды, трубой или средой установки.
[0044] Далее будет описан один способ установки и использования беспроводного сенсорного устройства 50. Предпочтительно, беспроводное сенсорное устройство 50 прикладывается к фитингу 10 для текучей среды (например, приводному кольцу 14) на заводе-изготовителе и до внедрения на место с использованием чувствительного к давлению клея или других клеящих веществ и т.д. Однако предполагается, что сенсорное устройство 50 может быть предусмотрено для установки на месте (например, с использованием чувствительного к давлению клея, покрытого разделительным слоем, или клеящего комплекта, предназначенного для использования на месте). Таким образом, фитинг 10 для текучей среды может быть изготовлен и отправлен конечному потребителю обычным способом, а сенсорное устройство 50 прикладывается только во время установки. Дополнительно предполагается, что сенсорное устройство 50 может быть приложено к существующим предварительно установленным фитингам на месте. Защитный покрывающий материал 60 может дополнительно наноситься поверх беспроводного сенсорного устройства 50 либо на заводе изготовителе, либо на месте. Предполагается, что один тип покрывающего материала 60 может использоваться для всех сенсорных устройств 50, или даже различные типы покрывающих материалов 60 могут использоваться для различных условий эксплуатации (например, для легких условий эксплуатации и для суровых/жестких условий эксплуатации). Кроме того, каждое сенсорное устройство 50 (особенно с микросхемой RFID), предпочтительно, включает в себя уникальный идентификатор, такой как уникальный числовой идентификатор. Уникальный идентификатор может быть получен с сенсорным устройством 50 и связан с серийным номером фитинга 10 для текучей среды. Эта комбинация может быть записана вручную и/или в компьютерной базе данных и т.д. Соответствующая информация о свойствах фитинга для текучей среды также может быть записана, например, тип фитинга, материал, заказчик, предполагаемая среда, дата изготовления и т.д., с показаниями, происходящими либо на стадии производства, либо на месте.
[0045] Фитинг 10 для текучей среды затем может быть отправлен конечному потребителю. Если сенсорное устройство 50 не было установлено предварительно, оно может быть приложено к приводному кольцу 14 фитинга 10 для текучей среды перед установкой. Затем фитинг 10 для текучей среды может быть несъемно установлен на трубе 16, как описано выше. После полной установки фитинга 10 для текучей среды, и/или даже во время процесса установки, запросчик RFID может использоваться для получения считывания деформации с беспроводного сенсорного устройства 50 установленного приводного кольца 14. Таким образом, считывание деформации с сенсорного устройства 50 будет происходить с приводного кольца 14 в установленном, упруго деформированном (то есть расширенном) состоянии. Также предполагается, что запросчик RFID может получать показания деформации от беспроводного сенсорного устройства 50 во время процесса установки фитинга. Любое или все показания (показание) деформации могут храниться в непереходной памяти одной из RFID памяти, или в памяти запросчика, или в памяти сетевого подключенного компьютерного устройства.
[0046] Дополнительно предполагается, что другие идентификационные данные могут быть переданы, записаны или иным образом сохранены во время каждого считывания датчика. Например, данные отметки времени для считывания, уникальный и прикладной код, температура окружающей среды, температура приводного кольца 14, другие факторы окружающей среды и т.д. могут быть обнаружены, переданы и/или сохранены. Другая информация может быть записана и/или зафиксирована относительно самого фитинга, такая как тип фитинга, состав материала, предполагаемое использование (например, характеристики трубы или эксплуатационные условия) и т.д. Этот тип контекстуальной информации может быть использован для обеспечения более индивидуального анализа данных в отношении необработанных данных, полученных от сенсорного устройства 50.
[0047] Кроме того, предполагается, что с использованием запросчика 100, может быть выполнено считывание деформации для приводного кольца 14 непосредственно перед установкой на трубу 16 (то есть до применения сжимающего усилия на фитинг). Это может рассматриваться как первый электрический параметр, который обеспечивает базисную ссылку места деформации приводного кольца 14 в окружающей среде, в которой он будет установлен. Кроме того, действие приложения измерителя деформации к объекту, такому как приводное кольцо 14, может вызвать или зарегистрировать некоторое напряжение на самом датчике деформации. Таким образом, начальное считывание деформации приводного кольца 14 в не установленном состоянии может обеспечить точку отсчета, с которой можно сравнить показание предельного значения деформации в установленном состоянии. Дополнительно предполагается, что точка отсчета показания деформации в не установленном состоянии, может быть использована для установки тарировки или нулевой точки для датчика деформации. Эта нулевая точка может быть выполнена в программном обеспечении, например, в запросчике или в интегральной схеме сенсорного устройства 50. Для целей будущих показаний деформации предполагается, что считывание начального показания датчика деформации или нулевой точки может быть сохранено или иным образом записано в память интегральной схемы сенсорного устройства 50.
[0048] Далее, после установки приводного кольца 14 на трубу 16 (то есть после приложения сжимающего усилия на фитинг), запросчик 100 может использоваться для получения показания другой деформации. Это может рассматриваться как второй электрический параметр, создаваемый сенсорным устройством в ответ на упругую деформацию приводного кольца 14. Затем первый электрический параметр (т.е. до установки) может сравниваться со вторым электрическим параметром (т.е. после установки) для получения окончательного значения, указывающего на качество не текущего крепления между фитингом и трубой. Как будет рассмотрено более подробно здесь, окончательное значение может сравниваться с одним из заданного диапазона, диапазона допуска или порогового значения для того, чтобы определить качество не текущего крепления. Таким образом, изготовитель, конечный пользователь, и персонал по контролю качества могут иметь высокую степень уверенности в том, что уплотнение завершено (то есть полностью установлено), и что допустимое притягивание произошло.
[0049] Далее, дополнительно предполагается, что будущие периодические показания датчика деформации могут быть получены от сенсорного устройства 50 по желанию для обеспечения непрерывной истории степени исправности и состояния приводного кольца 14 в установленном состоянии (чтобы ощутить изменения в напряжении из-за возраста, использования, текучей среды в трубе, механических воздействий на прикрепленный фитинг или трубу, или других факторов, таких как давление, температура, вибрация и т.д.). В более широком смысле, показание деформации приводного кольца 14 может использоваться для экстраполяции состояния установленного фитинга 10 для текучей среды на трубе на протяжении его полезного срока службы в эксплуатации, так что конечный пользователь имеет высокую уверенность в понимании того, как установленный фитинг стареет "с точки зрения внутреннего устройства". Из-за беспроводной бесконтактной природы RFID сенсорного устройства 50, такие будущие периодические показания датчика могут быть получены быстрым и эффективным способом без необходимости прерывать работу трубы 16 в ее предполагаемом месте использования, даже если труба 16 скрыта или иным образом труднодоступна.
[0050] В дополнение к получению и хранению показания датчика, либо запросчик, либо, возможно, сенсорное устройство 50 могут включать компьютерное программирование для анализа и/или сравнения данных. Хотя предварительные данные считывания воспринятой деформации приводного кольца 14 являются полезными, может быть полезно предоставить конечному потребителю указание о том, находится ли воспринятая деформация в заданном, приемлемом диапазоне, что указывает на то, что фитинг 10 для текучей среды установлен правильно по назначению, а его степень исправности и состояние является приемлемым. В одном примере, запросчик может быть запрограммирован с приемлемым диапазоном воспринятых показаний деформации, таким как заданный предел допуска приемлемых показаний, и может сравнивать данные с установленного сенсорного устройства 50 с заданным диапазоном, пределом допуска, или пороговой величиной (пороговыми величинами). Если считывание данных с сенсорного устройства 50 находится в допустимом диапазоне, запросчик может указать это на дисплее или другом устройстве обратной связи с пользователем. Напротив, если считывание данных с сенсорного устройства 50 указывает, что фитинг 10 для текучей среды установлен неправильно, запросчик также может указать эту информацию конечному пользователю, чтобы он мог выполнить корректирующее действие.
[0051] В соответствии с этими принципами, такое сравнение и/или анализ данных может быть выполнен в течение всего срока службы установленного фитинга 10 для текучей среды, так что конечный потребитель имеет постоянную высокую уверенность в том, что установленный фитинг для текучей среды все еще работает в пределах конструктивных параметров. В качестве альтернативы, если периодические будущие воспринятые показания указывают на то, что фитинг 10 для текучей среды выходит за пределы (например, приемлемое показание, которое все больше направляется к или становится неприемлемым показанием), или превысило заданный порог (например, неприемлемое показание), конечный потребитель может быть проинформирован о том, что он должен отремонтировать или заменить фитинг для текучей среды до возможного отказа. Таким образом, сенсорное устройство может использоваться для определения прогностического отказа до того, как возникнут какие-либо проблемы в фитинге для текучей среды и/или трубе, так что можно предпринять корректирующие действия. Предполагается, что анализ данных может принимать во внимание контекстуальную информацию, такую как тип фитинга, состав материала, предполагаемое использование (например, характеристики трубы или среды места установки) и т.д. для определения заранее определенного допустимого диапазона (диапазонов) или порога (порогов).
[0052] Сенсорное устройство 50 может включать в себя встроенную обратную связь с пользователем (например, слышимую или визуальную обратную связь с пользователем посредством источников света, дисплеев или динамиков и т.д.). В одном примере, устройство 58 обратной связи может представлять собой светодиодный источник света, который светится конкретным цветом при хорошей установке (например, зеленым) и другим цветом при плохой установке (например, красным). Другие цвета могут использоваться для обозначения других состояний, например, желтый свет для указания, что фитинг находится в пределах заданного диапазона или имеет тенденцию к определенному порогу. Различные встроенные устройства обратной связи сенсорного устройства 50 могут быть особенно полезны в полуактивной или полностью активной системе со встроенным источником питания (например, гибкой батареей, миниатюрным элементом питания и т.п.), хотя возможно, что маломощный светодиодный источник света или тому подобное могут быть в достаточной степени обеспечены электроэнергией RFID запросчиком. Когда используется полуактивное или полностью активное сенсорное устройство 50, один или несколько встроенных переключателей 57 могут использоваться для обеспечения других функциональных возможностей, таких как активация сенсорного устройства 50 из режима ожидания с низким энергопотреблением, получение мгновенного считывания в реальном времени, которое сохраняется в памяти, и/или обеспечение мгновенной обратной связи от встроенного светодиодного источника света или тому подобного. В одном примере, пользователь может нажать переключатель 57, чтобы активировать встроенную интегральную схему, чтобы фиксировать мгновенное показание со встроенного датчика деформации и обеспечивать мгновенную обратную связь через светодиодный источник света без необходимости использования запросчика RFID. В этом случае конечный пользователь не будет знать полученные предварительные данные, но просто будет знать, находится ли фитинг еще в пределах технических требований или нет через обратную связь от светодиодного источника света. В одном примере, при нажатии переключателя 57, сенсорное устройство 50 может считывать мгновенную деформацию, а затем сравнивать это мгновенное показание с некоторым известным порогом или другим сравнительным значением или алгоритмом. Если мгновенное показание находится в пределах допустимого допуска, светодиодный источник света может светиться зеленым цветом; наоборот, если мгновенное показание указывает на неприемлемое состояние, светодиодный источник света может загораться красным цветом. Дополнительно, можно использовать другие цвета, такие как желтый цвет, чтобы показать, что мгновенное показание по-прежнему приемлемо, но близко к неприемлемым, или имеет тенденцию к неприемлемости. Однако каждое показание, полученное таким образом, также может храниться во встроенной памяти сенсорного устройства 50 для последующего извлечения из запросчика. Предпочтительно, такие сохраненные показания будут включать в себя справочные данные, такие как метка даты/метка времени, значение показания, подтверждение того, была ли обратная связь отображена для пользователя и т.д.
Дополнительно, полезно получить показания датчика, полученные от сенсорного устройства 50, переданные или иным образом загруженные в базу 120 данных удаленного центрального компьютерного сервера (например, подключенного к сети или подключенного к интернету компьютера, иногда называемого «в облаке»). База 120 данных компьютерного сервера может быть локальной для сайта установки на месте или контролирующей компании, локальной для изготовителя фитинга для текучей среды, и/или может быть «с использованием вычислений в облаке», поскольку она поддерживается на удаленном подключенном к интернету сервере. Такой «на основе облака» подключенный к интернету сервер может обеспечивать возможности хранения и извлечения данных, и/или может дополнительно предоставлять вычислительные возможности для преобразования, анализа и/или отчета по каталогизированным данным. Независимо от местоположения, эта база данных может поддерживаться изготовителем фитинга 10 для текучей среды, сервисной компанией, которая проверяет фитинги, и/или конечным пользователем фитинга 10 для текучей среды для использования соответствующим персоналом по обеспечению качества. Когда используется неактивное (то есть пассивное) RFID сенсорное устройство 50, запросчик 100 может загружать данные проводным или беспроводным способом в базу 120 данных центрального компьютерного сервера. Конечно, с полуактивным или активным сенсорным устройством 50 такие данные могут быть загружены непосредственно от фитинга 10 (и/или из запросчика 100). Затем данные, полученные от сенсорного устройства 50, могут быть каталогизированы с течением времени, чтобы помочь как изготовителю, так и конечным потребителям отслеживать производительность фитинга для текучей среды для целей помощи в установке, обслуживании, замене, гарантийных требований и т.д.
[0054] В одном примере, исходные данные от сенсорного устройства 50 и связанного с ним фитинга 10 могут быть зафиксированы производителем до выхода продукта из склада, так что производитель имеет четкое представление о состоянии фитинга 10 для текучей среды и сенсорного устройства 50 перед установкой. Эти данные могут быть загружены в базу 120 данных компьютерного сервера для дальнейшего использования. Различные примеры этих данных могут включать в себя информацию о фитинге для текучей среды или датчике, такие как уникальный идентификатор сенсорного устройства, дата изготовления фитинга, тип фитинга, материал, заказчик, предполагаемая среда и т.д. Кроме того, если сенсорное устройство 50 предварительно прикреплено к фитингу для текучей среды (например, на приводное кольцо 14), тогда начальное показание деформации может быть взято для сенсорного устройства 50 в не установленном состоянии, чтобы обеспечить точку отсчета, от которой можно сравнивать показание предельной деформации в установленном состоянии. Это может рассматриваться тарировочной или нулевой точкой для датчика деформации, или возможно, только одной точкой отсчета. Эта исходная точка может быть сохранена в памяти сенсорного устройства 50 для использования запросчиком, и/или может быть сохранена в базе 120 данных компьютерного сервера.
[0055] Дополнительные данные датчика в эксплуатации затем могут быть записаны во время установки фитинга на трубу (непосредственно перед, во время, и/или после), а затем периодически после этого, чтобы производитель сохранял четкое представление о состоянии фитинга для текучей среды в течение его полезного срока службы. Например, считывание деформации может быть выполнено, когда фитинг 10 для текучей среды находится в состоянии предварительной установки, как показано на фиг.2. Это показание может обеспечить исходный уровень точки отсчета деформации приводного кольца 14 в окружающей среде, где оно будет установлено, и может быть особенно полезным в качестве тарировки или нулевой точки для датчика деформации (т.е. показания ненулевой деформации, которое может использоваться в качестве нулевой точки для сравнения с будущими показаниями деформации). Используя запросчик, это предварительно установленное показание деформации, полученное до процедуры установки, может быть передано и сохранено в памяти сенсорного устройства 50, и/или может быть сохранено в базе 120 данных компьютерного сервера для будущего использования. Если сенсорное устройство 50, если оно относится к типу, который не может принимать или хранить данные от запросчика (т.е. устройство типа только для чтения), тогда может быть особенно полезно хранить предварительно установленные показания деформации (т.е. нулевую точку) в базе 120 данных компьютерного сервера для будущего использования, используя запросчик 100 для прямой или косвенной передачи данных. По желанию, во время процесса установки можно выполнить одно или более считываний деформации и пластическую деформацию обжатия корпуса 12 и трубы 16, которые можно считать переходными показаниями. Эти переходные показания могут храниться (локально или удаленно в облаке) или просто наблюдаться во время установки.
[0056] Затем, считывание выполняется сразу же после процесса установки, когда кольцо 14 находится в полностью подтянутом состоянии, и уплотнение фитинга установлено на трубе, которое будет считаться показателем деформации после установки фитинга для текучей среды на трубе. Также возможно, что показание деформации после установки является единственным показанием. Используя запросчик 100, это показание деформации после установки может быть передано в и сохранено в памяти сенсорного устройства 50, и/или может быть сохранено в базе 120 данных компьютерного сервера для будущего использования. При желании, показание деформации после установки можно сравнить с показанием деформации перед установкой или с нулевой точкой, чтобы определить, является ли напряжение в приводном кольце 14 или корпусе 12 приемлемым и указывает на правильно установленный фитинг 10. После этого, периодические показания деформации могут выполняться с течением времени и загружаться в базу 120 данных компьютерного сервера, чтобы конечный пользователь, производитель и другие заинтересованные стороны сохраняли четкое представление о состоянии фитинга для текучей среды в течение его полезного срока службы.
[0057] Таким образом, как производитель, так и конечный пользователь могут отслеживать и иным образом понимать производительность фитинга 10 в эксплуатации, так что все участвующие стороны имеют высокую степень уверенности в том, что фитинг 10 для текучей среды продолжает выполнять его технические требования. В качестве альтернативы, если измеренные показания указывают на то, что фитинг 10 отличается от технических требований (т.е. все еще приемлем, но движется к неприемлемому) или не соответствует техническим требованиям (то есть, неприемлем), все стороны, имеющие доступ к центральной компьютерной базе данных, могут быть проинформированы о статусе. Это может позволить производителю связаться с конечным пользователем или конечному пользователю связаться с производителем, чтобы организовать техническое обслуживание или замену фитинга. Данные тенденции могут быть дополнительно поняты и идентифицированы путем наблюдения за информацией, например, о том, какое влияние оказывают конкретные фитинги, потребители, способы установки, факторы окружающей среды и т.д. на установку, производительность и долгосрочный период функционирования фитингов в условиях эксплуатации. Например, данные, указывающие на растрескивание под действием напряжения, микронапряжение или другие предшествующие отказу или режимы отказа, могут быть каталогизированы и коррелированы, а затем использованы для сравнения с другими фитингами для текучей среды в условиях эксплуатации для определения прогнозируемых отказов и определения возможных действий по устранению. База 120 данных компьютерного сервера (т.е. «облако») может хранить, анализировать, преобразовывать и сообщать о различных типах данных, включая некоторые или все исторические показания деформации, сравнение показаний деформаций (текущих и исторических), минимумы/максимумы, смещения данных, вычисления и т.д. Что касается отчетности, предполагается, что база 120 данных компьютерного сервера может быть пассивной, поскольку данные и/или отчеты могут быть скомпилированы, но пользователь, в конечном счете, принимает меры на основе данных, или может быть частично или полностью активной, при этом база 120 данных компьютерного сервера может предпринять дополнительные шаги, такие как предварительный отчет о потенциальных проблемах для производителя, конечного пользователя, сервисной компании и т.д. на основе анализа входных данных. Такая активная работа может быть частично или полностью автоматизированной.
[0058] Использование базы 120 данных компьютерного сервера также полезно для включения динамических показаний и анализа после обработки на основе изменения информации. Например, хотя термин «запросчик» используется здесь для простоты, понятно, что на практике маловероятно, что будет только одно устройство-запросчик, которое будет считывать показания со всех сенсорных устройств в условиях эксплуатации. В самом деле, более вероятно, что каждое конкретное сенсорное устройство будет опрошено несколькими разными запросчиками в течение его активного срока службы. Таким образом, сохраняя зарегистрированные данные в центральной базе 120 данных удаленного компьютерного сервера, не имеет значения, какой конкретный запросчик используется. Поскольку данные хранятся удаленно, что может включать в себя данные калибровки, хранящиеся в связи с уникальным идентификатором каждого сенсорного устройства, запросчику может не потребоваться какая-либо предварительная информация о считываемом конкретном сенсорном устройстве. Например, до приема показания деформации, запросчик 100 может получать конкретные данные калибровки для отдельного сенсорного устройства из базы 120 данных компьютерного сервера (если информация о калибровке недоступна от самого сенсорного устройства). Конкретные данные калибровки могут быть получены с помощью процедуры поиска, основанной на уникальном идентификаторе сенсорного устройства. Затем, когда сенсорное устройство передает показание (то есть электрический параметр) при опросе запросчиком, передаваемый электрический параметр может быть скорректирован путем применения ранее полученных калибровочных данных.
[0059] В другом примере, возможно, что пороги, диапазоны допуска, или заданные границы для приемлемого диапазона, которые указывают, что фитинг 10 для текучей среды установлен правильно по своему назначению, могут со временем меняться. Это может происходить по разным причинам, в том числе дополнительным исследованиям и разработкам, лучшему пониманию характеристик срока службы фитингов для текучей среды в различных средах, изменениям в производстве и т.д. Благодаря использованию облачной вычислительной среды, пороги, диапазоны допуска или заданные границы могут быть легко изменены в базе 120 данных компьютерного сервера и автоматически применены к данным для прошлых, настоящих (в режиме реального времени) или будущих показаний деформации. Например, исходя из опыта, можно определить, что порог производительности является слишком низким или слишком высоким; таким образом, путем изменения порога в базе 120 данных одиночного компьютерного сервера, его можно быстро применять во всех прошлых, настоящих (в режиме реального времени) или будущих показаниях деформации. Аналогичным образом, исходя из потребностей промышленности или потребителя, уникальные или разные пороговые значения, диапазоны допуска или заранее определенные границы могут применяться только к подмножеству продуктов (то есть только к определенным продуктам конкретного потребителя или отрасли), которые могут время от времени меняться.
[0060] Как отмечалось ранее, фитинги для текучей среды, рассматриваемые в данный момент, и трубы/патрубки, к которым они прикреплены, часто используются в промышленных установках и подвергаются суровым условиям эксплуатации, которые могут включать в себя низкие или высокие вибрационные нагрузки. Механическое воздействие и воздействие окружающей среды, испытываемое трубопроводным оборудованием при наличии непрерывных или прерывистых вибрационных нагрузок, может привести к повреждению фитингов и/или подсоединенных труб/патрубков, что может ухудшить работу различных элементов, в том числе уплотнения металл-металл между фитингом и трубой.
[0061] Чтобы понять, измерить и количественно определить механическое соединение фитинга для текучей среды к выдерживанию усталостных напряжений при различных вибрационных нагрузках с течением времени, вибрационные испытания фитинга и/или подсоединенной трубы/патрубка могут быть важным инструментом. Что касается вибрационных испытаний, то понимается, что вибрация дифференцируется на два типа: устойчивые (т.е. повторяющиеся колебания, которые происходят в течение относительно длительного периода времени) и динамические переходные вибрации (т.е. вибрация, которая возникает в относительно короткие периоды времени и обычно генерируется гораздо большими силами, такими как импульс высокого или низкого давления, проходящий через текучую среду). Обычно, известно проведение вибрационных испытаний существующего сварного шва между фитингом для текучей среды и подсоединенной трубой/патрубком. Однако такие способы проверки сварного шва являются только прерывистыми, сложными и интенсивными по времени/ресурсам.
[0062] Сенсорное устройство 50, рассматриваемое в данный момент, может быть дополнительно приспособлено для обеспечения непрерывного, полунепрерывного или прерывистого вибрационного испытания фитинга 10 для текучей среды и/или подсоединенной трубы/патрубка. Поскольку сенсорное устройство 50 приложено к наружной поверхности 40 приводного кольца 14 фитинга 10 для текучей среды, и фитинг 10 для текучей среды механически прикреплен к соединенной трубе/патрубку, сенсорное устройство 50 будет подвергаться тем же (или, по существу, тем же) вибрациям, связанным с трубой/патрубком. В результате один или несколько датчиков, расположенных на сенсорном устройстве 50, могут использоваться для определения вибрации, испытываемой фитингом 10 и соединенной трубой/патрубком.
[0063] В одном примере вибрации могут быть обнаружены косвенно сенсорным устройством 50 посредством одноосевого или много осевого датчика 56 измерителя деформации, измеряющего изменения физического напряжения в материале приводного кольца. Показания, полученные от датчика измерителя деформации, могут быть коррелированы к данным вибрации либо встроенного сенсорного устройства 50, либо в программном обеспечении RFID запросчика, либо другого беспроводного приемного устройства.
[0064] В других примерах, сенсорное устройство 50 может включать в себя один или несколько отдельных датчиков 70, таких как измеритель ускорения или датчик вибрации (например, пьезо датчик вибрации, полупроводниковый или фотодиодный и т.д.), для восприятия вибрации более непосредственно. Предполагается, что сенсорное устройство может включать только датчик для обнаружения вибрации в трубе. Эти различные отдельные датчики могут быть одноосевыми или много осевыми, если это необходимо. Показания, полученные от этих отдельных датчиков, могут непосредственно указывать данные вибрации, или могут быть коррелированы к данным вибрации либо встроенного сенсорного устройства 50, либо в программном обеспечении RFID запросчика, либо другого беспроводного приемного устройства.
[0065] При использовании или датчика измерителя деформации, или измерителя ускорения, или датчика вибрации, дополнительно предполагается, что встроенный температурный датчик 72 (измеряющий температуру фитинга, температуру трубы/патрубка и/или температуру окружающей среды) может быть включен для обеспечения контекста и/или калибровки данных вибрации. Предполагается, что датчик 72 температуры может быть встроенной интегральной схемой 54 или может быть отдельным датчиком температуры, сообщающимся с ней.
[0066] Что касается датчика деформации, общий источник ошибки в показаниях датчика обусловлен тем, что датчики могут иметь температурный коэффициент, когда выход измерительного преобразователя является не только функцией воспринятого параметра, такого как деформация, но также является функцией температуры, которой подвергается соответствующий датчик деформации. Таким образом, всякий раз, когда считывается деформация, сенсорное устройство 50 также может передавать данные о температуре вместе с показанием деформации. Это измерение температуры может быть от встроенного датчика температуры 72 или может быть отдельным датчиком, например, привязанным датчиком, который расположен рядом с измерительным преобразователем деформации для измерения температуры очень близко к датчику, или даже датчиком температуры на запросчике 100, который может сообщать о температуре окружающей среды. Предпочтительно, каждое сенсорное устройство 50 калибруется по температуре на предприятии перед установкой на фитинг для текучей среды, или даже после установки на фитинг для текучей среды, но до установки фитинга для текучей среды на трубу. Данные калибровки, которые могут включать в себя температурный коэффициент или константу, предпочтительно, записываются во встроенную память сенсорного устройства 50 для последующего использования запросчиком 100. Кроме того, данные калибровки (включая температурный коэффициент, если он имеется) также, предпочтительно, записываются в базу 120 данных компьютерного сервера (то есть в облако) для будущего использования запросчиком 100 для обеспечения точных показаний каждого отдельного сенсорного устройства 50. Это особенно полезно, когда датчик деформации доступен только для чтения и не может хранить встроенные данные калибровки. Дополнительно, предполагается, что запросчик 100 может действовать только как «проходное» устройство, которое получает первичные данные от сенсорного устройства 50 (показания деформации, показания температуры, показания вибрации и т.д.) и передает эти первичные данные в базу 120 данных компьютерного сервера для обработки, посредством чего применяются калибровки, данные анализируются и/или преобразуются в окончательные показания деформации.
[0067] Следует отметить, что хотя сенсорное устройство 50 может включать в себя один или несколько дополнительных датчиков, как описано выше, дополнительно предполагается, что датчик измерителя ускорения/вибрации может быть выполнен в совершенно отдельном беспроводном сенсорном устройстве, которое отдельно применяется к фитингу для текучей среды и/или соединенной трубе/патрубку. Такое отдельное беспроводное сенсорное устройство может быть, по существу, аналогично описанному выше сенсорному устройству 50, включая любые признаки, варианты установки, защиту и т.д., рассмотренные здесь, хотя он будет включать датчик измерителя ускорения и/или вибрации вместо датчика деформации. Таким образом, фитинг 10 может иметь два отдельных сенсорных устройства 50, прикрепленных к нему (то есть датчик деформации и датчик вибрации). Разумеется, лежащая в основе электроника такого отдельного сенсорного устройства может быть изготовлена так, чтобы более точно отвечать особым требованиям конкретного используемого датчика, особенно в случае реализации с использованием RFID или других беспроводных систем передачи.
[0068] Показания вибрации могут быть получены вручную устройством опроса, аналогичным ранее описанному здесь. В одном варианте осуществления, если вибрация воспринимается датчиками, которые являются частью сенсорного устройства 50, тогда такие воспринятые данные могут быть переданы запросчику, когда показания деформации уже получены. Альтернативно, запросчик может получать отдельные показания для каждой из измеренных деформации и вибрации. В еще одной альтернативе, можно было бы использовать отдельные устройства опроса, чтобы отдельно получать воспринятые показания деформации и воспринятые показания вибрации. Такие отдельные показания могут быть получены, если сенсорное устройство 50 включает только датчик деформации или дополнительные измерители ускорения или датчики вибрации. Отдельные показания могут быть дополнительно получены, если датчик измерителя ускорения/вибрации воплощен в совершенно отдельном беспроводном сенсорном устройстве, и любые результирующие показания могут быть сохранены в памяти сенсорного устройства, запросчика, или базе 120 данных компьютерного сервера.
[0069] Однако, поскольку вибрация происходит довольно постоянно в трубе/патрубке в результате потока текучей среды, особенно при промышленной рабочей обстановке, полезно измерять показания вибрации на непрерывной или полу непрерывной основе, в отличие от прерывистых и периодических показаний. В одном примере, специальный запросчик может располагаться относительно близко к местоположению считываемой воспринимаемой вибрации и может периодически опрашивать сенсорное устройство для получения непрерывных или полу непрерывных показаний вибрации. Специальный запросчик может также выступать в качестве локального источника питания для RFID версии устройства датчика вибрации. Такой специальный запросчик, предпочтительно, подключается к локальной сети (LAN) или глобальной сети (WAN, Интернет) для удаленного управления и сбора данных. Собранные данные могут быть автоматически записаны и загружены/сохранены локально в RFID сенсорном устройстве, специальном запросчике, или в базе 120 данных сетевого компьютерного сервера (то есть «облаке»). Дополнительно, предполагается, что такая специальная система опроса может также использоваться для использования с RFID датчиком деформации, чтобы автоматически принимать любые непрерывные, полу непрерывные, прерывистые и/или периодические показания, которые могут быть также загружены/сохранены локально в RFID сенсорном устройстве, специальном запросчике или в базе 120 данных сетевого компьютерного сервера. Если доступ к сетевой компьютерной системе не всегда доступен, периодические показания датчика могут быть временно сохранены локально в RFID сенсорном устройстве или специальном опросчике до тех пор, пока пользователь не получит возможность загрузки в базу 120 данных компьютерного сервера.
[0070] Предпочтительно, устройство датчика вибрации, когда осуществляет использование RFID, получает всю свою электроэнергию для работы по радиочастотному сигналу от запросчика. Однако, для того, чтобы получать непрерывные или полу непрерывные показания датчика вибрации, без необходимости в близком запросчике, устройство датчика вибрации может быть полуактивным или полностью активным устройством со встроенным источником 59 питания, таким как миниатюрный элемент питания, или предпочтительно, гибкая печатная батарея. Такое активное или полуактивное устройство может получать непрерывные или полу непрерывные показания со встроенного датчика деформации, измерителя ускорения и/или датчика вибрации и сохранять показания в локальной встроенной памяти. Сохраненные показания могут периодически передаваться/загружаться в запросчик по желанию пользователя. Дополнительно, предполагается, что переключатель (аналогичный переключателю 57, описанному здесь) может быть предусмотрен для считывания показаний по требованию. В других вариантах осуществления, активное или полуактивное устройство может получать непрерывные или полу непрерывные показания вибрации и может только записывать показания в память, если воспринимаемая вибрация превышает заданное значение (например, вибрационные события вне допуска). Дополнительная выгода включает обеспечение большего диапазона беспроводной связи для связи с RFID запросчиком, активный протокол связи (Bluetooth, Wi-Fi, сотовый и т.д.), активную обработку данных встроенного компьютера, звуковую или визуальную обратную связь с пользователем через источник света, дисплеи или динамики и т.д.
[0071] Полезные данные о вибрации могут захватываться непрерывно, полу непрерывно или периодически после этого, так что производитель сохраняет четкое представление о состоянии фитинга для текучей среды и соединенной трубы/патрубка в течение его полезного срока службы. Собранные данные могут быть, в конечном счете, сохранены в базе 120 данных компьютерного сервера, если необходимо. Таким образом, как производитель, так и конечный пользователь могут отслеживать и иным образом понимать производительность фитинга 10 в эксплуатации, так что все участвующие стороны имеют высокую степень уверенности в том, что фитинг 10 для текучей среды продолжает выполнять его технические требования. В качестве альтернативы, если воспринятые показания указывают, что фитинг 10 или соединенная труба/патрубок отклоняются от технических характеристик или не соответствуют технической характеристике в результате вибрационных нагрузок, все стороны, имеющие доступ к базе данных центрального компьютера, могут быть проинформированы о состоянии. Это может позволить производителю связаться с конечным пользователем или конечному пользователю связаться с производителем для организации технического обслуживания или замены фитинга и/или соединенной трубы/патрубка.
[0072] Изобретение описано со ссылкой к примеру вариантов осуществления, описанным выше. Модификации и изменения будут иметь место с другими при прочтении и понимании этой спецификации. Примеры вариантов осуществления, включающие один или несколько аспектов изобретения, предназначены для включения всех таких модификаций и изменений в той мере, в какой они входят в объем прилагаемой формулы изобретения.
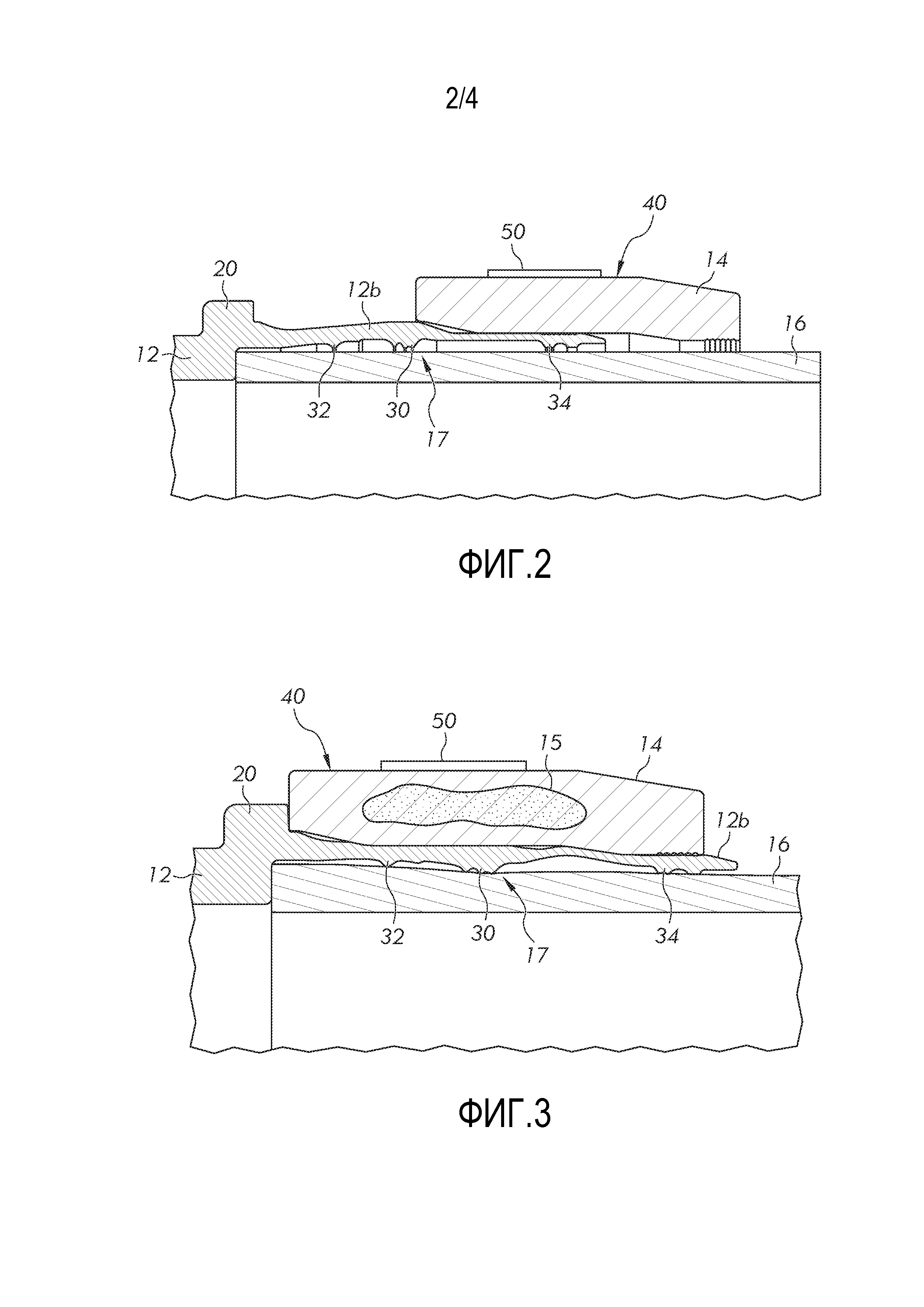
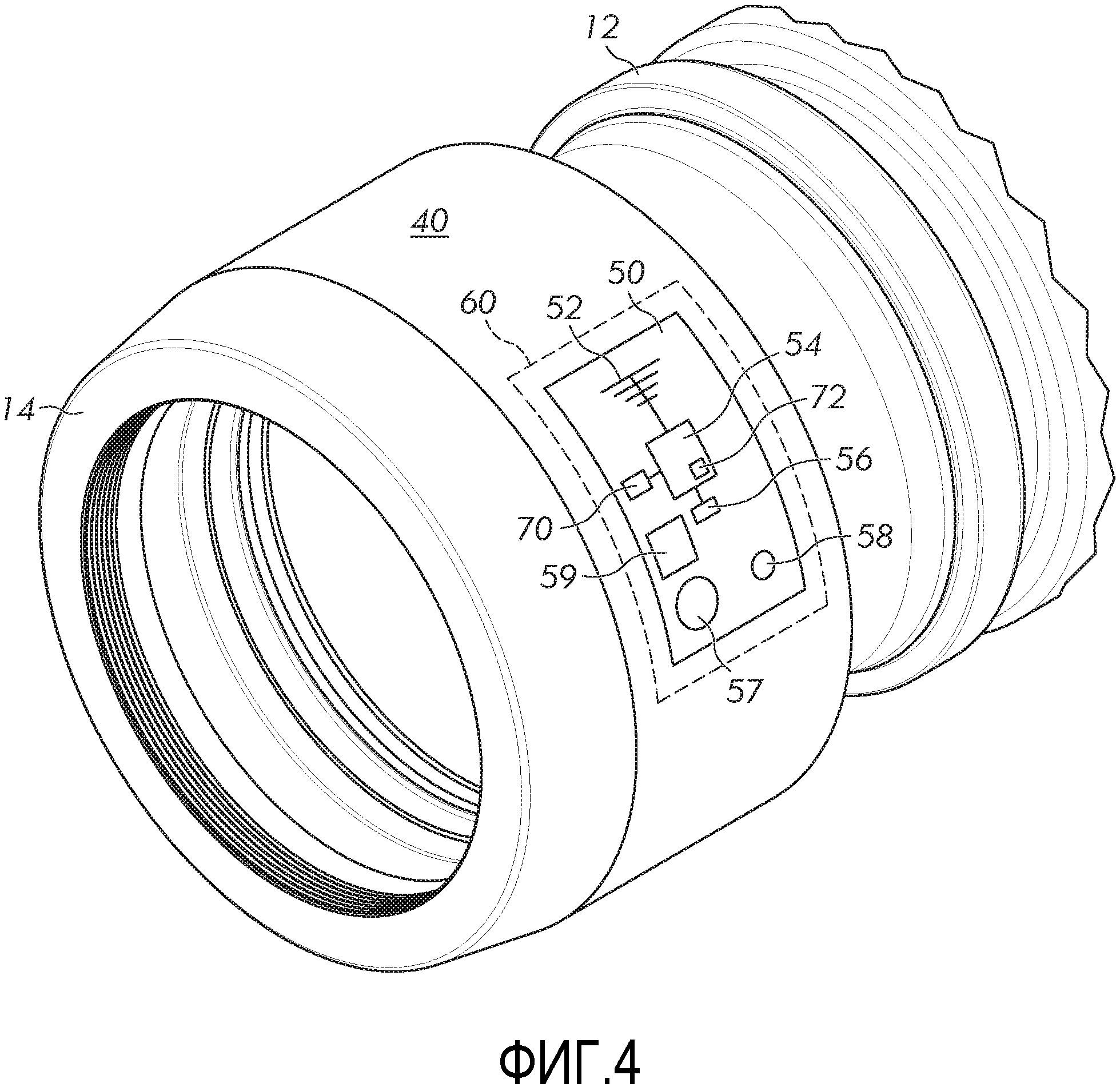
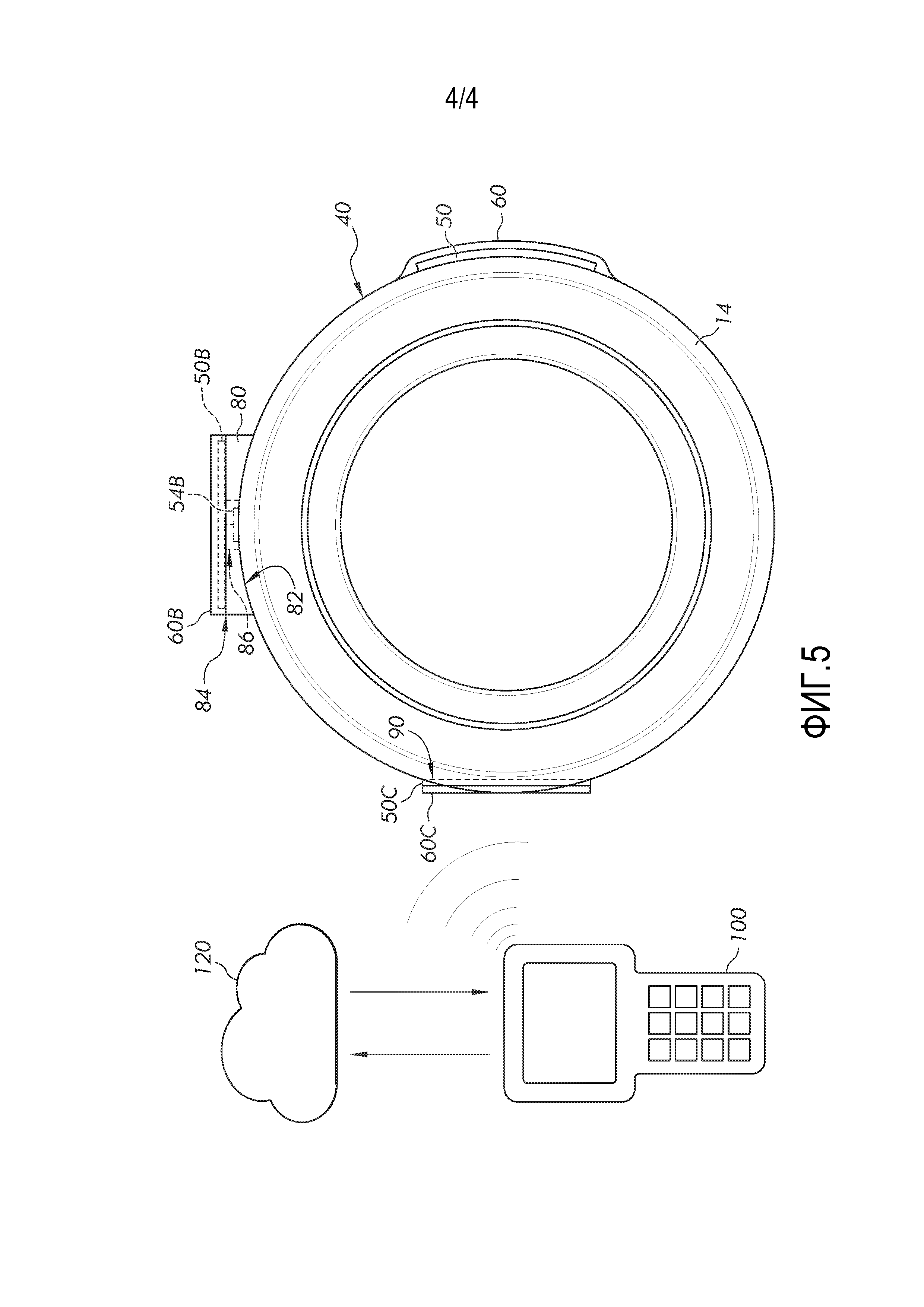
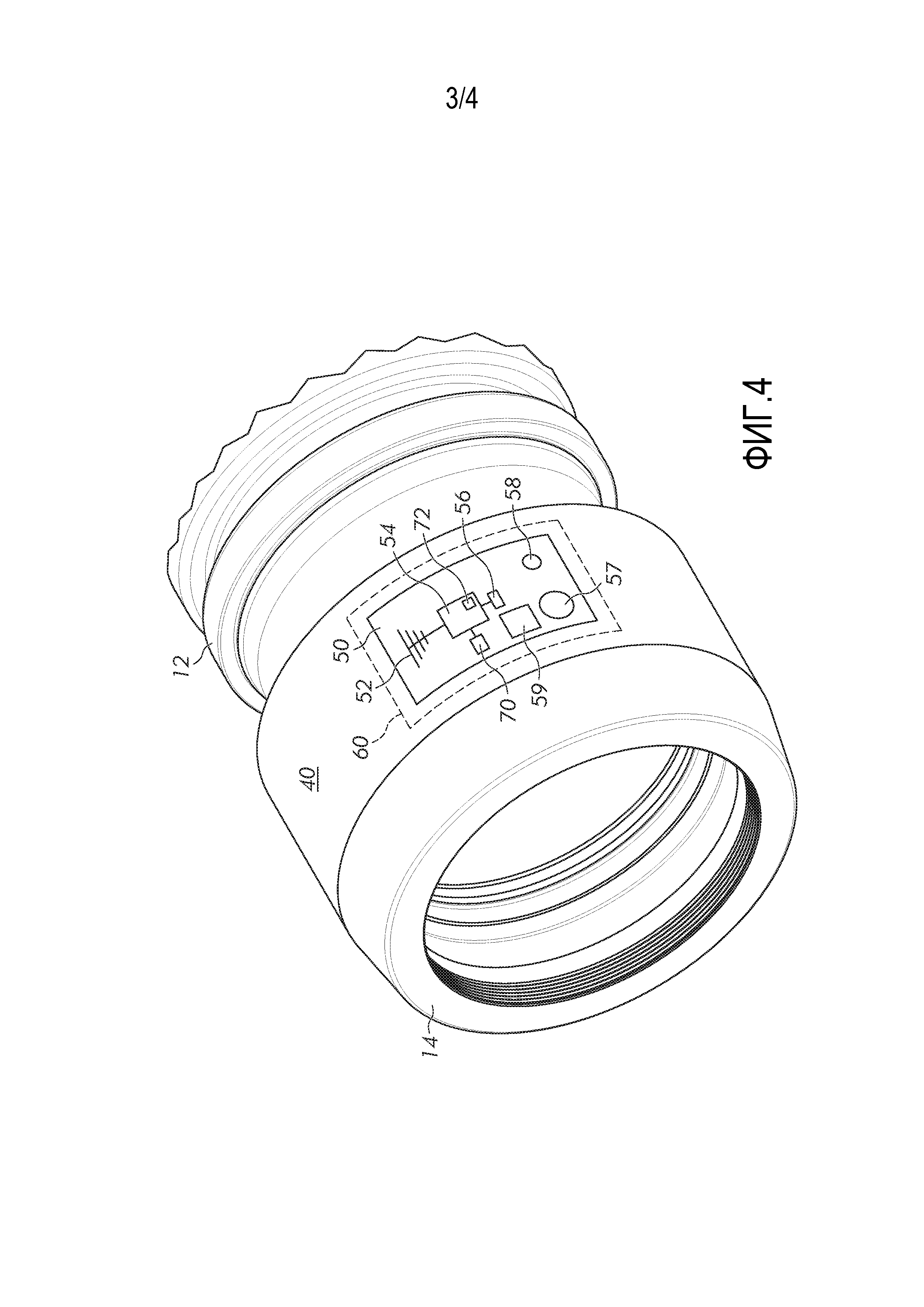
Аккумулирующая энергию rfid-схема, rfid-метка с функцией аккумулирования энергии и связанные с ними способы

