Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ
Вид РИД
Изобретение
Область техники
Изобретение касается способа измерения и изображения геометрии пути системы рельсового пути при помощи путевой машины на рельсовом ходу, имеющей управляющую измерительную систему для измерения подлежащего корректировке положения пути перед подъемно-рихтовочным устройством, приемочную измерительную систему для замера скорректированного положения пути после подъемно-рихтовочного устройства и подключенные устройства вывода для изображения результатов измерений, при этом подъемно-рихтовочное устройство настраивается в зависимости от результатов измерений управляющей измерительной системы и приемочной измерительной системы в смысле достижения заданной номинальной геометрии рельсового пути, которая, в частности, задается в виде графика кривизны, графика продольного уровня и графика возвышения.
Уровень техники
Большинство железнодорожных путей выполнены в виде верхнего строения пути с щебеночным балластом. При этом шпалы лежат в щебеночном балласте. Щебеночный балласт имеет задачу отведения сил, действующих на колеса, в постель балласта, восприятия поперечных сил, которые действуют на рельс и шпалу, и отведения поверхностной воды. Действующие на колеса силы движущихся на них поездов вызывают неравномерные оседания в щебеночном балласте и смещения геометрии бокового положения пути. Вследствие оседаний щебеночного основания возникают дефекты в продольном уровне, возвышении (на кривой), перекосе и положении по рихтовке.
Когда превышаются определенные, установленные дирекциями железных дорог комфортные предельные значения или безопасные предельные значения этих геометрических величин, то запланированно и своевременно проводятся работы по текущему обслуживанию. Когда превышаются установленные опасные предельные значения, то, в зависимости от величины дефектов, снижается скорость или заграждается путь, и немедленно проводится устранение этих так называемых отдельных дефектов. Устранение и выправка этих геометрических дефектов пути обычно проводится с помощью путеукладочных машин. Для управления этим процессом существуют измерительные системы для регистрации текущего положения пути, для параметров: рихтовка, подъем, перекос и поперечный уклон.
Чтобы путь после таких работ по улучшению геометрии рельсового пути снова мог свободно передаваться в эксплуатацию, путевые машины оснащены так называемыми приемочными измерительными системами и приемочными системами самописцев. Для качества положения пути после улучшения с помощью путевых машин или других методов администрации железных дорог установили так называемые приемочные допуски. Они представляют собой минимальные требования к качеству произведенных геометрических улучшений. Эти требования подтверждаются приемочными измерительными системами и приемочными системами самописцев. Записанные результаты представляют собой официальные, релевантные для безопасности документы. Поэтому такие приемочные измерительные системы и приемочные системы самописцев должны повергаться регулярной калибровке и приемке уполномоченными инстанциями. При этом подлежащими выправлению и записыванию величинами, которые можно назвать, является перекос пути, продольный уровень, рихтовка или боковое положение пути, ширина колеи и поперечный уклон или возвышение пути.
Номинальные геометрии железнодорожных путей доступны в виде планов расположений путей, и после ввода в управляющий компьютер могут использоваться для расчета систематических дефектов при знании свойств измерительных систем. На путеукладочных машинах есть машинист головного вагона, который является ответственным за управление машиной в отношении номинальной геометрии, а также в отношении приемки с помощью регистратора данных. При дефекте, который показывает приемочная запись, машина должна, например, возвращаться, и дефект исправляться, чтобы соблюдались приемочные допуски.
Машинисту головного вагона путеукладочных машин геометрия рельсового пути принятым сегодня способом представляется в виде характеристик кривизны пути на протяжении длины кривой. Изображение осуществляется визуально на экране компьютера в виде диаграмм. На отдельном дополнительном экране машинисту представляются диаграммы, которые изображают отклонения отдельных параметров от номинального положения. Принятым до сих пор способом машинист, в зависимости от этих отклонений, может дополнительно вводить корректировочные значения. Например, если путь отжимается, он может распорядиться несколько придавить путь машинами. Но так как приемочный самописец записывает положение пути только примерно через 10 м после места обработки данного положения пути, последствие корректировочного значения заметно только с задержкой во времени.
Изображение в виде графика кривизны, графика продольного уклона и графика возвышения является абстрактным и не совсем понятным для лиц, обслуживающих машину. Вид из лобового окна машины, который показывает реальное положение пути, не совпадает с изображенным математическим абстрактным компьютерным графиком на экране. Поэтому этот распространенный способ ставит сложные требования к машинисту, имеющиеся информационные данные являются необозримыми, трудными для понимания и поэтому легко ведут к ошибкам обслуживания. Все это затрудняется не только двумя независимыми компьютерами для ведения по номинальному положению пути и цифрового приемочного самописца, но еще и тем, что оси изображений записи измерения между компьютером для ведения машины и приемочным компьютером обычно бывают изображены в точности наоборот.
Запись геометрических положений пути осуществляется сегодня стандартным образом чаще всего с помощью асимметричных хордовых измерительных систем (хордовые участки a, b). При этом между передней и задней, прижатой одной стороной к пути, путеизмерительной тележкой в середине зажимается стальная хорда. Между этими зажимными тележками располагается и одной стороной прижимается путеизмерительная тележка. На этой путеизмерительной тележке установлено считывающее устройство, которое замеряет положение стальной хорды из среднего положения. Это значение называется стрелой изгиба. Для рихтовки тележки прижимаются с наружной стороны кривой. Для высоты в качестве эталона используется внутренний рельс кривой. График номинальной кривизны с помощью следующей формулы стрелы изгиба преобразуется в график номинальной стрелы изгиба (пропорционально графику кривизны).
При измерении характеристика рассчитанной таким образом номинальной стрелы изгиба сравнивается с измеренной фактической стрелой изгиба, и разность записывается. Для этих разностей администрациями железных дорог задаются приемочные предельные значения. Этот метод аналогично применяется также для графика кривизны продольного уклона. Возвышение может указываться непосредственно по оси, проходящей через центр тяжести, относительно нее, и измеряться с помощью отвеса или других уклономеров, и могут указываться отклонения при сравнении с номинальными возвышениями. Для отклонений возвышения также действуют приемочные предельные значения. Измерения стрелы изгиба подчиняются так называемой передаточной функции, то есть усиление и положение фаз измеренных дефектов зависимы от длины волны и только качественно соответствуют действительным дефектам геометрии рельсового пути.
Раскрытие изобретения
Таким образом, в основе изобретения лежит задача, указать способ вышеизложенного рода, с помощью которого номинальная геометрия рельсового пути, фактическая геометрия рельсового пути и возникшие вследствие неточности работы отклонения от номинальной геометрии рельсового пути изображаются обозримо таким образом, что вероятности неправильного обслуживания машины снижаются, и становится возможным интуитивное управление машиной.
Изобретение решает поставленную задачу таким образом, что сначала из графика кривизны, графика продольного уровня и графика возвышения номинальной геометрии рельсового пути вычисляется трехмерный график положения, этот трехмерный график положения переводится в перспективное изображение и изображается с помощью устройства вывода, и этот перспективный график положения дополняется измеренными характеристиками дефектов для параметров пути: рихтовка пути, возвышение, перекос и продольный уровень.
Номинальная геометрия рельсового пути, фактическая геометрия рельсового пути и возникшие из-за неточности работы отклонения от номинальной геометрии рельсового пути так же, как и последствия корректирующего вмешательства машиниста, изображаются в перспективе на графике, который по существу совпадает с видом из его окна в направлении работы. Кроме того, на этот перспективный график могут наноситься определенные отметки пути (точки синхронизации), такие как положения стрелок, положения мостов или основные точки кривых (положения на пути, в которых изменяется график кривизны рихтовки, график продольного уклона или график возвышения). Для этого номинальной геометрии рельсового пути присваиваются точки синхронизации, которые изображаются в соответствующих положениях перспективного изображения характеристики пути, причем при достижении точек синхронизации путевой машиной осуществляется синхронизация фактических точек синхронизации в системе рельсового пути с виртуальными точками синхронизации перспективного изображения.
Расположение путевой машины на изображении устройства вывода и изображение текущих значений дефектов осуществляется непрерывно с движением машины вперед. При этом вид машиниста из его окна в направлении работы всегда по существу совпадает с перспективным изображением. Характеристика остаточных дефектов предварительно рассчитывается в зависимости от измеренных характеристик дефектов и произведенных регулирующих вмешательств и тоже визуализируется на перспективном изображении.
Кроме того, положение пути перед путевой машиной может записываться с помощью устройства для съемки изображений, положение рельсов может рассчитываться с помощью аналитической обработки изображений, и рассчитанное положение рельсов и номинальная геометрия рельсового пути изображаться в перспективе на графике положения. При этом машинист может уже заранее учитывать сообщаемые ему, требуемые корректирующие вмешательства. Для этого рекомендуется, чтобы рассчитывалась характеристика отклонений подлежащего корректировке положения пути от номинального положения, и вычислялись тенденции и отображались на устройстве вывода, чтобы путем своевременного воздействия на подъемно-рихтовочные устройства можно было обеспечивать соблюдение допусков. Корректировки вычисленных отклонений подлежащего корректировке положения пути от номинального положения перед подъемно-рихтовочным устройством могут производиться автоматически системой управления подъемно-рихтовочного устройства.
Так как путевые машины чаще всего измеряют длину кривой с помощью счетчиков пройденного пути, и эти счетчики вследствие буксования, загрязнения колеса и пр. имеют небольшие неточности, машина синхронизируется по точкам синхронизации с номинальной длиной кривой. Для этого точки синхронизации могут записываться перед путевой машиной с помощью устройства для съемки изображений и для синхронизации включаются в перспективный график, начиная с предварительно выбираемого приближения. Синхронизация позволяет избежать накопления ошибок измерения длины кривой. Синхронизация может осуществляться вручную или автоматически.
В соответствии с изобретением заданная с помощью графиков кривизны для бокового положения, графиков продольного уклона для положения по уровню и графиков возвышения для возвышения пути номинальная геометрия рельсового пути преобразуется в трехмерную пространственную кривую, и в дальнейшем номинальная геометрия рельсового пути изображается в перспективе визуально, на экране или т.п. Зарегистрированные отклонения полученного положения пути от номинального положения вносятся в перспективный график и используются для выправки с помощью управления либо в автоматическом коде, либо ручном коде. Точки синхронизации пути, которые служат для синхронизации измеренной длины кривой путеукладочной машины с фактической длиной кривой, тоже изображаются в перспективе по их положению, также как и другие важные точки пути, такие как стрелки, мосты, переезды и пр.
Автоматическая корректировка остаточных ошибок геометрии рельсового пути может, например, осуществляться путем расчета средних значений записанных дефектов продольного уровня, рихтовки или возвышения (например, на протяжении пройденных 10 м), причем это среднее значение соответствующих дефектов возвращается в управление путевой машины для корректировки (петля обратной связи). Если, например, среднее значение дефекта возвышения составляет около -2 мм, то возвышенная сторона приподнимается путевой машиной на 2 мм выше, чтобы компенсировать этот дефект. Аналогично это относится и к другим измеряемым величинам.
Перспективный график с помощью проектора для проецирования на лобовое стекло может проецироваться на лобовое стекло машины для сооружения верхнего строения пути и/или изображаться с помощью информационных очков. Кроме того, перспективный график может передаваться по беспроводному каналу передачи данных в пространственно удаленный от места использования путевой машины пункт управления для контроля продвижения работ, при этом при необходимости работы осуществляются с дистанционным управлением с этого пункта управления.
Краткое описание чертежей
На чертеже изображен предмет изобретения в качестве примера. Показано:
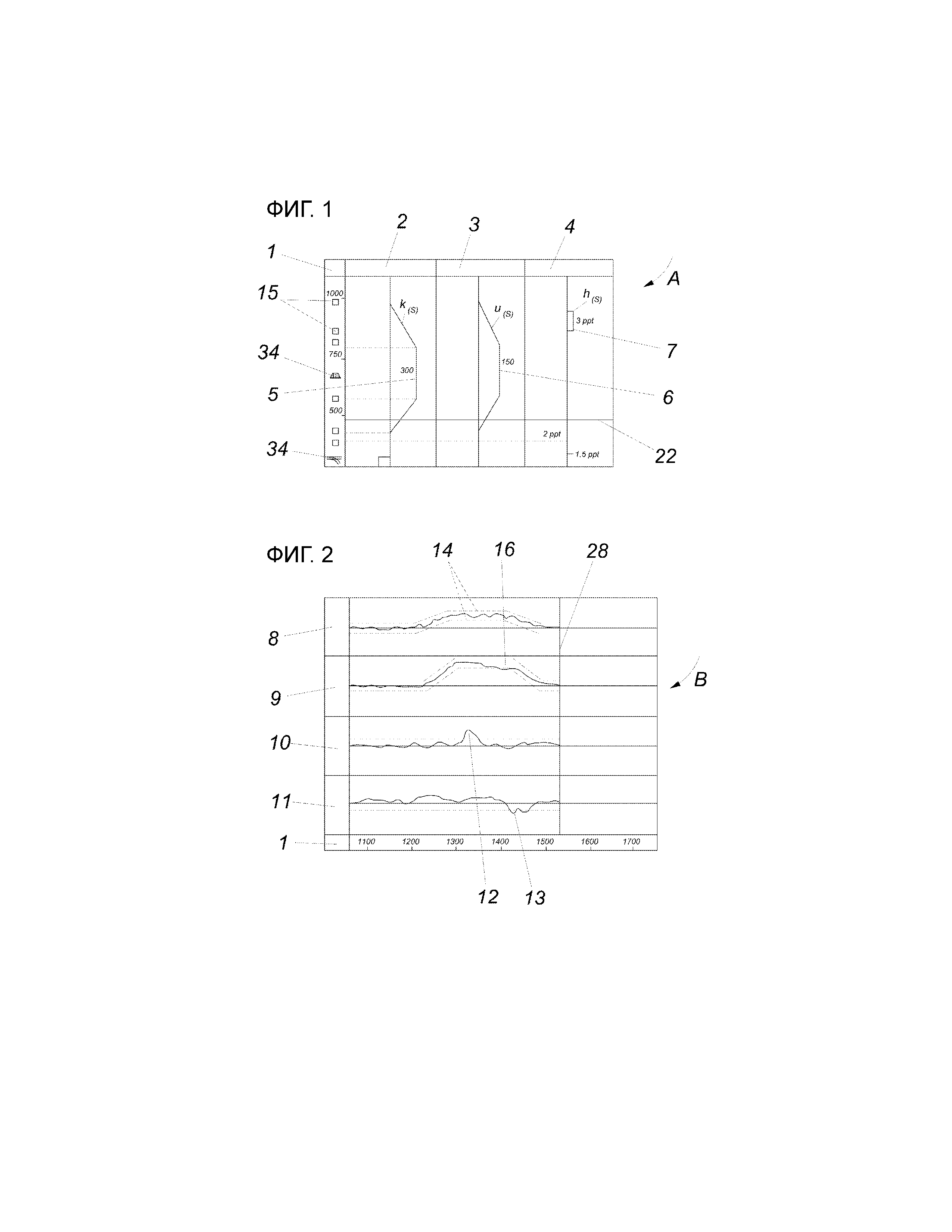
фиг.1: изображение на мониторе номинального графика кривизны, графика возвышения и графика продольного уклона, а также точек синхронизации по уровню техники;
фиг.2: изображение графика монитора записи измерений после проведенной работы по текущему содержанию по уровню техники;
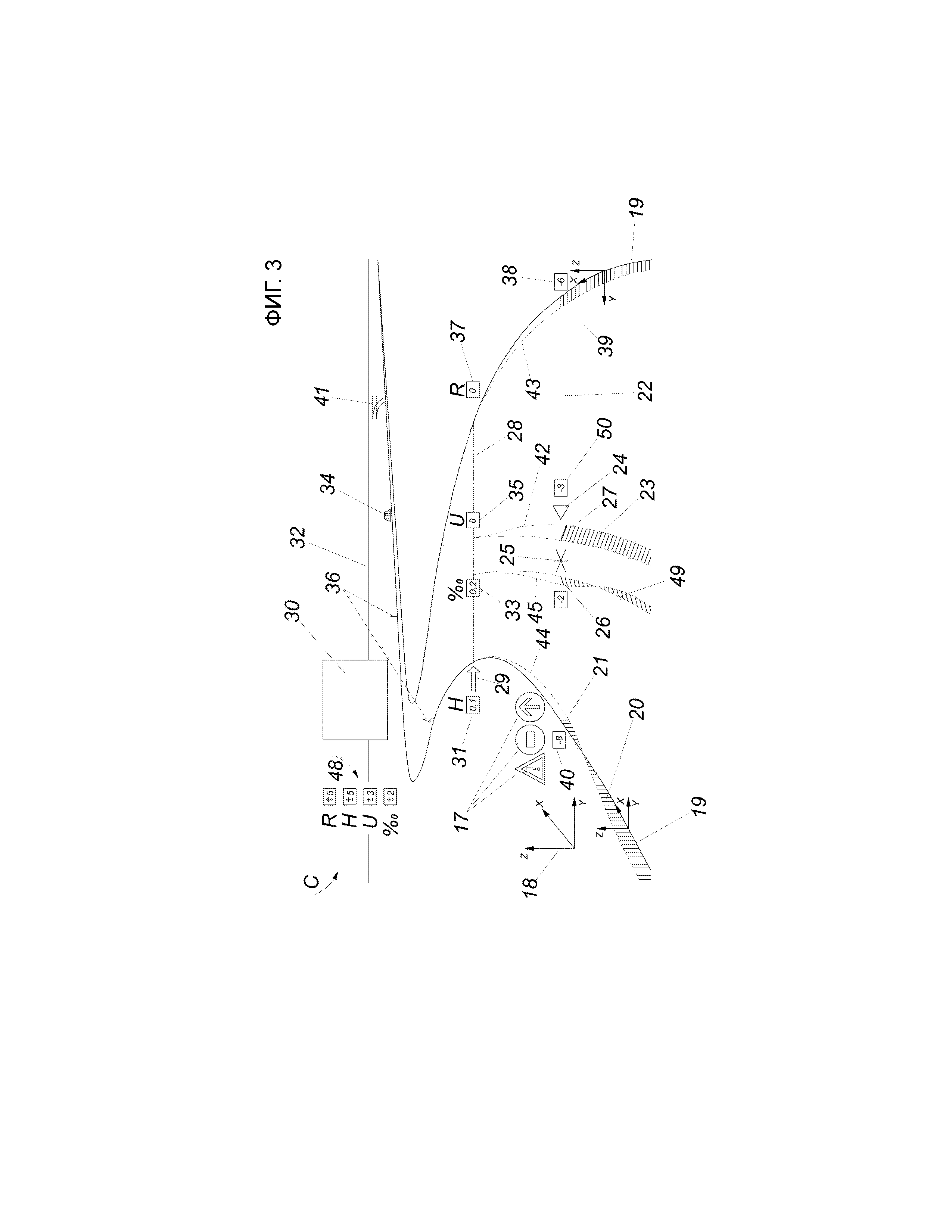
фиг.3: предлагаемое изобретением перспективное изображение геометрии рельсового пути, остаточных ошибок пути и точек синхронизации;
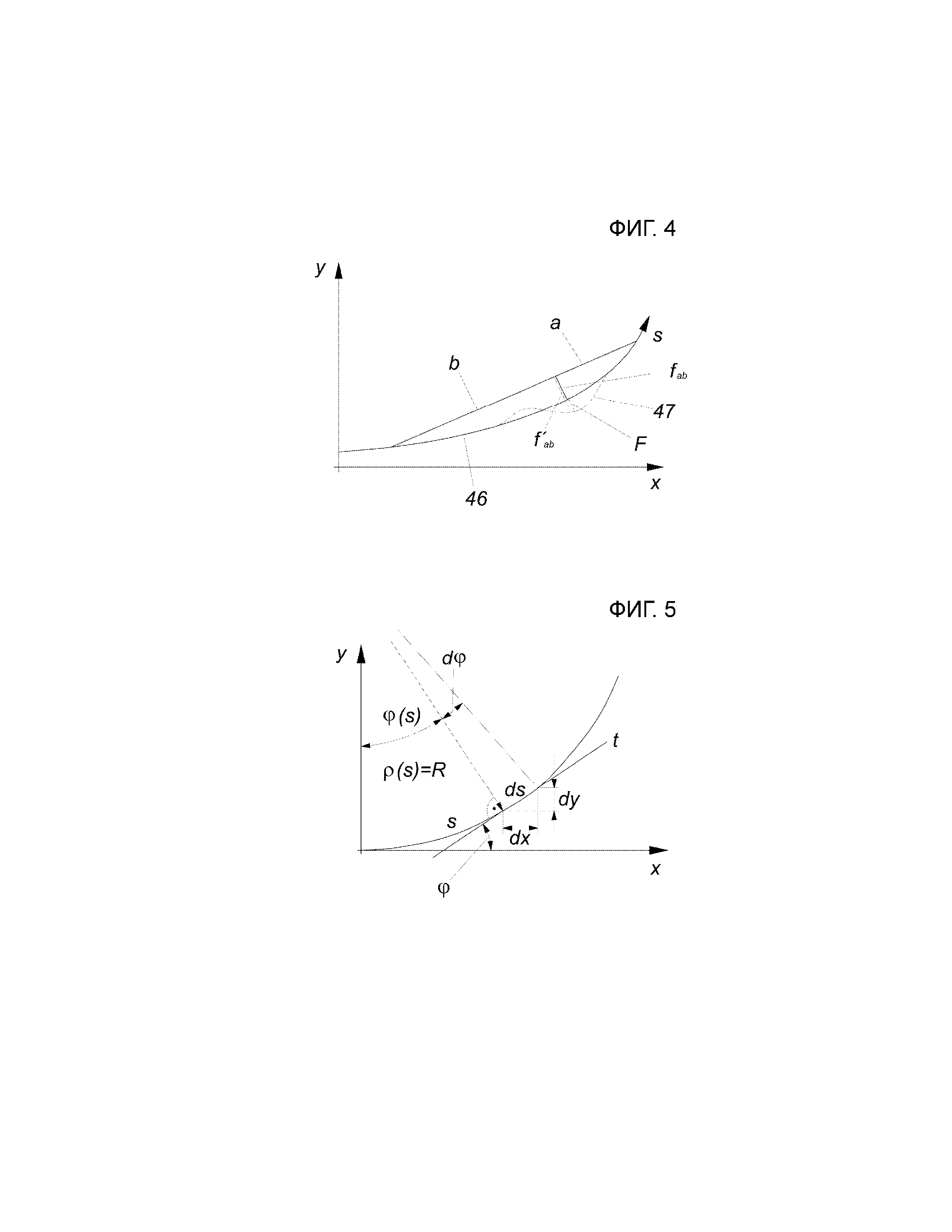
фиг.4: местный график положения пути в горизонтальной проекции с измерением по асимметричной хорде;
фиг.5: изображение положения пути в горизонтальной проекции с указанием радиуса кривизны, угла кривой пути и прилегающей касательной;
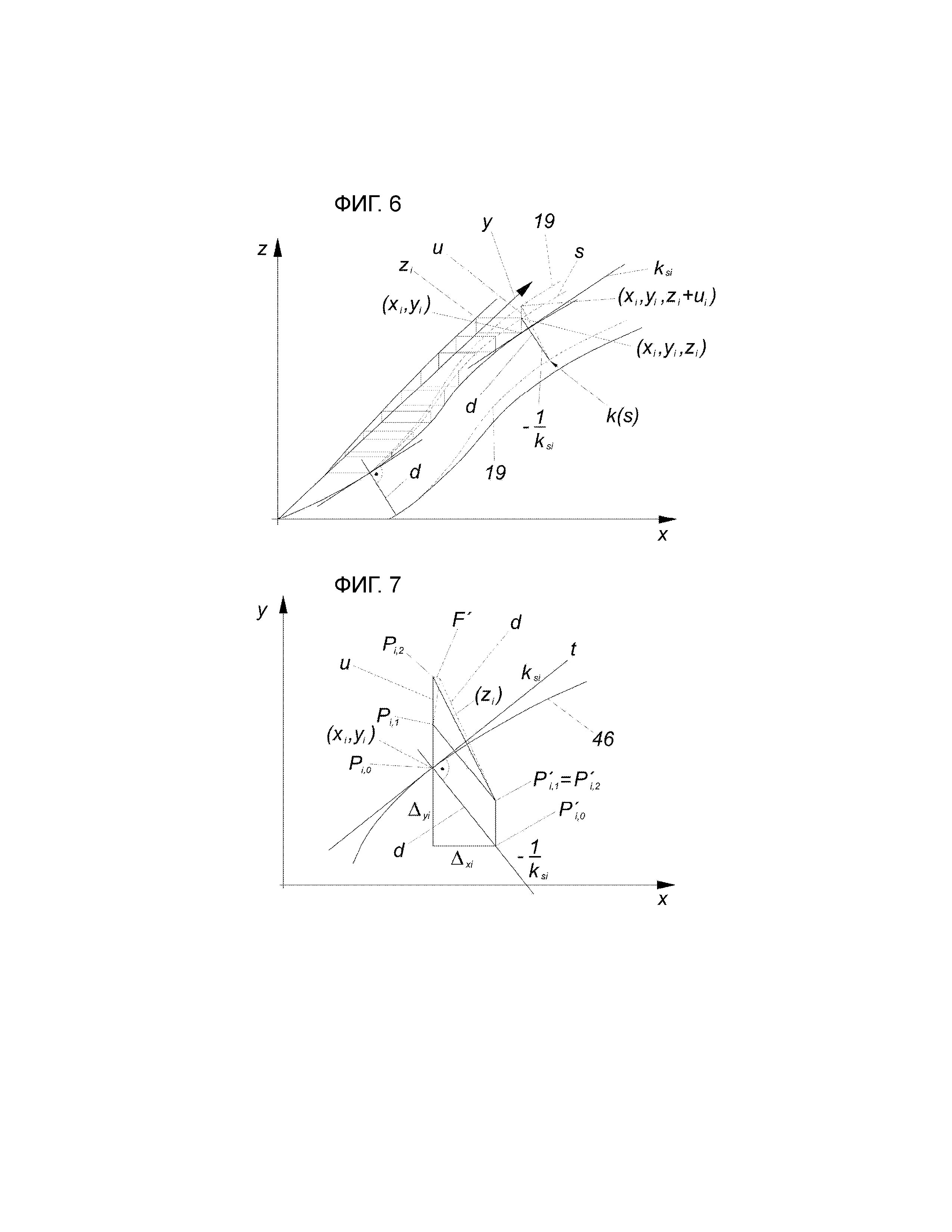
фиг.6: изображение компоновки трехмерных координат изображения из горизонтальной проекции, положения по уровню и возвышения, и
фиг.7: детальное изображение компоновки трехмерных координат изображения из горизонтальной проекции, положения по уровню и возвышения.
Осуществления изобретения
На фиг.1 в качестве примера показано схематичное изображение A монитора компьютера геометрии рельсового пути по уровню техники. В первой колонке 1 указывается километраж длины кривой. Следующая колонка 2 показывает характеристику так называемого графика k(s) кривизны. Кривизна 5 соответствует обратному значению радиуса 1/Ri пути. Чтобы при движении по путям из прямой в кривую пути не возникал слишком сильный рывок, выполняются так называемые переходные кривые. Простейшей формой переходной кривой является линейная переходная кривая, у которой кривизна с длиной кривой постоянно увеличивается, пока она не достигнет кривизны, которая соответствует радиусу пути. Для характеристики кривизны линейной переходной кривой имеет место:

В горизонтальной проекции линейная переходная кривая представляет собой клотоиду. Наряду с этой переходной кривой, есть также другие варианты осуществления, такие как так называемая переходная кривая Блосса, имеющая характеристику кривизны согласно уравнению:
Известны также косинус или синусоидальные, а также биквадратные (Гельмерт) переходные кривые и другие формы. Общим для всех является, что для нахождения декартовых координат для горизонтальной проекции не могут использоваться аналитические методы, а должны применяться методы приближения или численные методы. Изображение кривизны на протяжении длины кривой k(s) для представления в декартовой системе координат требует двойного интегрирования.
Следующая колонка 3 показывает характеристику возвышения 6 u(s). Возвышение, как правило, указывается в мм. Оно представляет собой величину, приподнимаясь на которую относительно внутреннего рельса кривой, как эталона, укладывается наружный рельс кривой.
Последняя колонка 4 показывает график h(s) 7 продольного уклона, который также указывается как график кривизны. Так как уклоны у железной дороги относительно невелики, для продольного уровня не нужны переходные кривые. Чаще всего выполняются только небольшие закругления перехода от одного уклона к другому или не выполняются совсем. В колонке 1 символически изображаются также точки синхронизации с основными точками 15 кривой или для особых мест, таких как мосты 34 или стрелки 34. Во время работы положение машины 22 в геометрии изображается горизонтальным штрихом.
На фиг.2 схематично изображен экран B монитора цифрового записывающего регистратора геометрического положения пути по уровню техники после работы по выправке положения пути. Самая нижняя строка 1 показывает километраж (длина кривой). В самой верхней строке 8 изображена характеристика измеренной стрелы изгиба (рихтовка), а вокруг этого результата измерения - допустимые допуски 14. Когда эти допуски превышаются, то машинист предупреждается посредством сигнала. Вторая строка 9 сверху изображает характеристику измеренного возвышения и линии допусков. В 16 имеется превышение в сторону уменьшения. В этом случае машина должна возвращаться, и эта область выправляться еще раз, пока не будут соответствовать допуски. Третья строка сверху 10 показывает характеристику продольного уровня с линиями допусков. Здесь также в 12 имеет место превышение. Наконец, в четвертой колонке сверху 11 изображена величина, выведенная из возвышения - перекос. Перекос представляет собой величину, которая в связи с ее значением для безопасности в отношении схода с рельсов является особенно критичной для безопасности. Показанное превышение в 13 требует доработки с помощью подбивочной машины. Положение вертикальной линии 28 представляет собой положение текущей записи измерения.
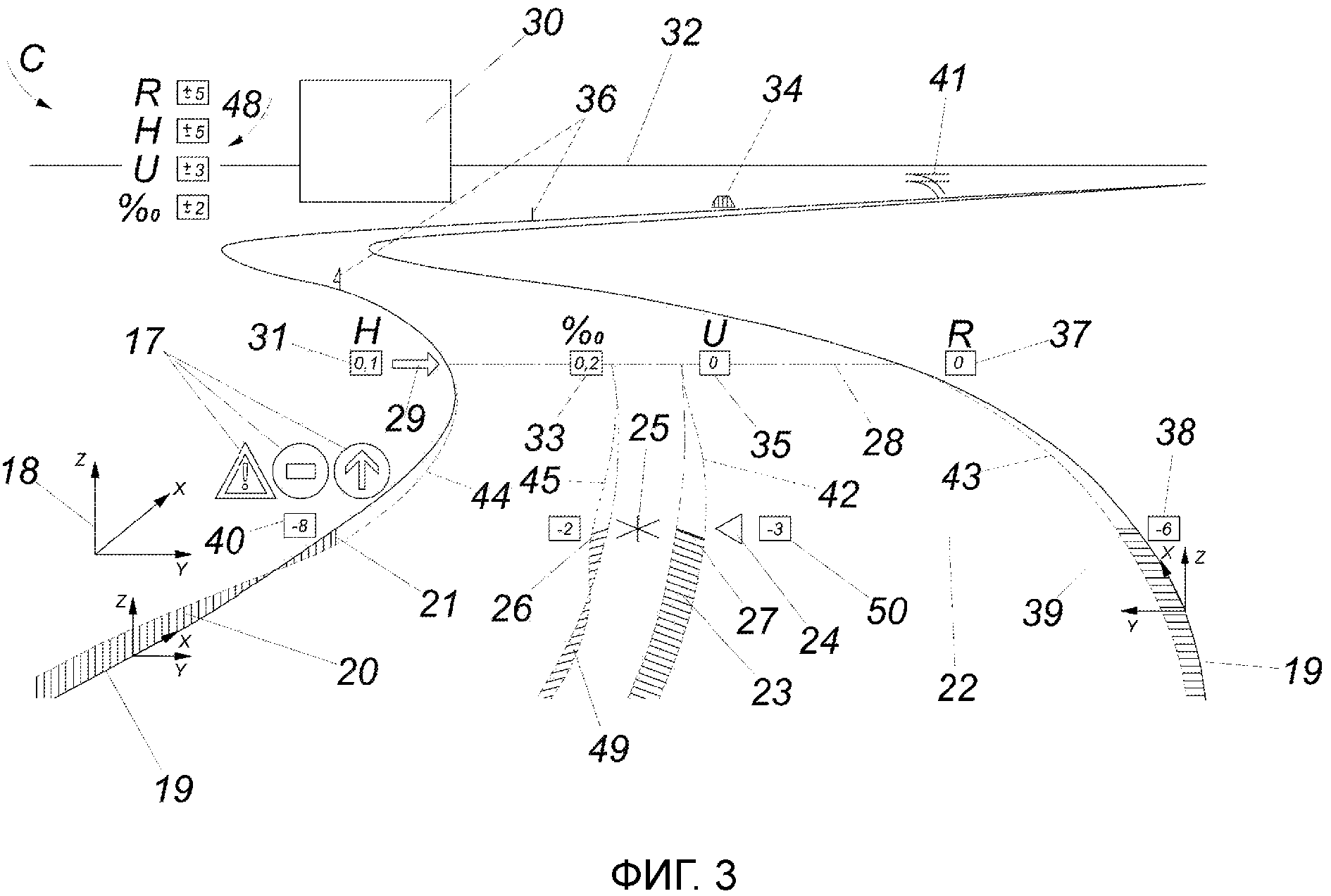
На фиг.3 изображен предлагаемый изобретением перспективный график ведения машины. Вышеописанные два графика монитора для компьютера A положения пути и приемочного самописца B на графиках кривизны на протяжении длины кривой интегрируются в этот график в виде перспективного изображения положения пути. Из заданных значений номинальной геометрии рельсового пути, из графика k(s), 2 кривизны, графика h(s), 4 продольного уровня и графика u(s,) 3 возвышения номинальной геометрии рельсового пути вычисляется трехмерный график положения. Этот трехмерный график 19 положения приводится в перспективное изображение и изображается с помощью устройства вывода. Кроме того, перспективный график положения дополняется измеренными характеристиками дефектов для параметров пути: рихтовка 39 пути, возвышение 23, перекос 49 и продольный уровень 20. То есть рассчитывается пространственная номинальная кривая в декартовых координатах, и она преобразуется в перспективное изображение и представляется. 19 показывает расчетную колею номинального положения пути. 29 символически изображается рабочее положение машины. 28 показывает текущее положение машины для сооружения верхнего строения пути. 22 показывает положение записи самописца. 20 изображает отклонение продольного уровня от номинального положения пути по уровню. 21 показывает текущее последнее отклонение. Значение этого отклонения указывается в поле 40. 31 показывает прогнозированное значение, которое установилось бы при корректировке. Линия 44 показывает предварительно рассчитанную характеристику при ручном воздействии машиниста с помощью компенсационного потенциометра. В автоматическом режиме компьютер сам бы вычислил и произвел необходимую корректировку. 48 показывает разрешенные предельные значения для измеряемых приемочных параметров. R указывает отклонение положения рихтовки в мм, H - отклонения положения по уровню в мм, u - отклонения возвышения в мм, а %o - допустимое предельное значение перекоса в промилле. Линия 39 указывает горизонтальные отклонения положения пути относительно номинальной кривой пути. В 38 имеющееся в текущем месте измерения отклонение выдается в числовом виде. 43 снова представляет собой характеристику предварительно рассчитанной кривой при ручной или автоматической корректировке. В 37 указывается предварительно рассчитанное значение отклонения. 23 изображает отклонение возвышения. Угол штриховки указывает, имеется ли дефект возвышения в сторону увеличения или в сторону уменьшения. Наряду с этим, 50 текущее отклонение изображено в числовом виде. 24 изображает возвышение в виде символа. Так как речь идет о левой кривой, возвышен правый рельс. При этом отклонение положения рихтовки всегда показывается на наружном рельсе кривой, а продольный уровень - на внутреннем рельсе кривой, так как он является эталонным рельсом для уровня. 42 снова изображает прогнозированную кривую развития дефекта возвышения при соответствующей ручной или автоматической корректировке. 35 представляет собой значение, которое получилось бы предположительно при последующем измерении. 27 представляет собой текущее отклонение возвышения в месте измерения, 49 представляет собой кривую отклонения перекоса. 25 является символом перекоса. 26 представляет собой текущее отклонение в месте измерения. 45 снова представляет собой предварительно рассчитанную кривую ручного или, соответственно, автоматического корректирующего вмешательства. 33 - это значение, которое получилось бы при текущих корректировочных значениях в месте работ. При превышении одного их предельных значений приемочных кривых, или, когда характеристика приемочных кривых удовлетворительна, появляется значок 17. При этом символ справа означал бы безукоризненную характеристику, средний изображал бы недопустимое превышение допусков, в то время как крайний левый означал бы, что тенденция отклонения указывает на скорое превышение предельных значений. 36 отмечены точки синхронизации основных точек кривой. Другие возможные точки синхронизации, такие как мост 34 или стрелка 41, изображены «красноречивым» образом. 32 показывает горизонт. Когда машина приближается до предварительно установленного предельного значения к точке синхронизации (напр., 5 м), то осуществляется оптическое и/или акустическое предупреждение, и в 30 включается изображение с видеокамеры точек синхронизации. Синхронизация осуществляется машинистом с помощью видеоизображения или при взгляде из окна вручную с помощью кнопочного выключателя. Точки синхронизации, как правило, обозначены на рельсе. Когда передняя зажимная тележка находится точно над точкой синхронизации, происходит синхронизация. В перспективе график C изображается из легкой птичьей перспективы с общей для двух рельсов точкой схода в бесконечности. При этом ход рельсов рассчитывается и изображается только до некоторой конечной длины (напр., 50 м).
Фиг.4 изображает кривую 46 в горизонтальной проекции. Обычными у путевых машин для измерения положения пути являются так называемые методы измерения по стреле изгиба. При этом на рельсе вдоль кривой (длина s кривой) посредством путеизмерительной тележки проводится хорда (a, b) длиной l=a+b. 47 показывает дефект пути. Вычисленная номинальная стрела fab изгиба сравнивается машиной с измеренной стрелой f'ab изгиба. Отсюда получается отклонение F, которое компенсируется машиной путем соответствующей рихтовки. Обычно применяются асимметричные хорды с длинами a и b участков. Стрела изгиба получается при этом как
На фиг.5 схематично показана кривая 46 в горизонтальной проекции (координаты x, y) и зависимость между углом ϕ кривой и размером s кривой. Для расчета координатного изображения имеют место следующие математические зависимости:





Так как интегралы, как правило, не решаются аналитически, они рассчитываются в численном виде. При этом k(s) представляет собой характеристику кривизны в горизонтальной проекции. Для положения по уровню поступают аналогично - характеристика уровня проецируется на плоскость y, z. Возвышение может рассчитываться непосредственно (так как имеется в виде u(s)) и для этого прибавляться к оси z эталонного рельса (всегда наружного рельса кривой). Расстояние между рельсами d (d - ширина колеи, стандартная колея=1435 мм).
Фиг.6 показывает, как из горизонтальной проекции (в плоскости x, y), вертикальной проекции (плоскости y, z), возвышения u и ширины d колеи может вычисляться трехмерная характеристика рельсов.
Фиг.7 изображает компоновку в деталях. Расчетная точка (Pi,0) с координатами (xi, yi) в плоскости x, y дополняется координатой z из вертикальной проекции с получением трехмерной точки Pi,1 с координатами (xi, yi, zi). Так как речь идет о правой кривой, возвышение u нанесено на левом рельсе. Получается точка Pi,2 с координатами (xi, yi, zi+ui). Перпендикулярно (-1/ksi) на касательную t (наклон ksi) в горизонтальной проекции сносится ширина d колеи, при этом для параллельного рельса получается точка P'i,0 с координатами (x'i, y'i). Для получения трехмерной точки P'i,1 добавляется координата z (x'i, y'i, z'i). При точном расчете возвышение (наружной кривой) располагается не перпендикулярно к плоскости x, y, а слегка наискосок (макс. примерно 6°). Это отклонение F' для перспективного изображения незначительно, и поэтому им пренебрегают.
Подбивочная машина для уплотнения балластного слоя пути
Способ и устройство для уплотнения щебеночного балластного слоя рельсового пути
Устройство для уплотнения щебеночного основания рельсового пути
Подбивочный агрегат для шпалоподбивочной машины
Способ калибровки устройства для измерения рельсовых путей
Способ и устройство для уплотнения щебеночного балластного слоя рельсового пути
Способ удаления поврежденных отрезков рельсов и машина для этого
Шпалоподбивочный агрегат для шпалоподбивочной машины
Способ для корректировки положения рельсового пути
Шпалоподбивочная машина для уплотнения щебеночного балластного слоя рельсового пути
Контрольное устройство и способ наблюдения за рабочим поездом

