Результат интеллектуальной деятельности: СИСТЕМЫ И СПОСОБЫ ВОЗВРАТА ДЛЯ БЕСПИЛОТНЫХ ПОДВОДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Область техники
[0001] Настоящее раскрытие относится к области возврата беспилотных подводных транспортных средств (БПТС).
Уровень техники
[0002] Беспилотные подводные транспортные средства могут быть безвозвратно утеряны во время подводной работы и могут не иметь возможности возврата на поверхность по множеству причин. Беспилотное подводное транспортное средство может непреднамеренно погрузится ниже расчетной глубины погружения, может застрять в мусоре или тине, может остаться без энергии и не иметь возможности возврата на поверхность и т.д. По конструкции беспилотные подводные транспортные средства часто обладают нейтральной плавучестью, для которой может потребоваться, чтобы в беспилотном подводном транспортном средстве использовалась двигательная установка для возврата на поверхность. Однако двигательная установка может быть недоступна, когда отсутствует энергия или в беспилотном подводном транспортном средстве возникли программные и/или компьютерные неполадки. В результате беспилотное подводное транспортное средство может дрейфовать под водой, что делает его возврат практически невозможным.
Раскрытие изобретения
[0003] Варианты реализации, описанные в настоящем раскрытии, обеспечивают системы и способы возврата для беспилотного подводного транспортного средства, которые используют множество независимых высвобождающих механизмов, которые позволяют отсоединять нагрузку и обеспечивают возможность всплытия беспилотного подводного транспортного средства на поверхность воды. Каждый независимый высвобождающий механизм выполнены с возможностью отсоединения нагрузки от беспилотного подводного транспортного средства с использованием различных условий высвобождения, посредством чего беспилотное подводное транспортное средство получает положительную плавучесть, когда соблюдены несколько условий.
[0004] Один вариант реализации представляет собой систему возврата беспилотного подводного транспортного средства. Система возврата содержит выполненную с возможностью отсоединения нагрузку, которая обеспечивает беспилотному подводному транспортному средству нейтральную плавучесть в воде. Система возврата также содержит множество высвобождающих механизмов, которые выполнены с возможностью отсоединения нагрузки для придания беспилотному подводному транспортному средству положительной плавучести в воде. Высвобождающие механизмы включают первый, второй и третий высвобождающий механизм. Первый высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на командный сигнал. Второй высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на то, что беспилотное подводное транспортное средство погружено в воду дольше порогового времени. Третий высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на то, что беспилотное подводное транспортное средство погружено в воду глубже максимальной глубины.
[0005] Другой вариант реализации представляет собой систему возврата для беспилотного подводного транспортного средства. Система возврата содержит выполненную с возможностью отсоединения нагрузку, первый высвобождающий механизм, второй высвобождающий механизм и третий высвобождающий механизм. Нагрузка выполнена с возможностью придания беспилотному подводному транспортному средству положительной плавучести в воде при высвобождении. Первый высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на командный сигнал. Второй высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на то, что беспилотное подводное транспортное средство погружено в воду дольше порогового времени. Третий высвобождающий механизм выполнен с возможностью отсоединения нагрузки в ответ на то, что беспилотное подводное транспортное средство погружено в воду глубже максимальной глубины.
[0006] Другой вариант реализации представляет собой способ работы системы возврата для беспилотного подводного транспортного средства. Способ включает прикрепление выполненной с возможностью отсоединения нагрузки, которая придает беспилотному подводному транспортному средству нейтральную плавучесть в воде. Способ также включает отсоединение нагрузки в ответ на командный сигнал для придания беспилотному подводному транспортному средству положительной плавучести в воде. Способ также включает отсоединение нагрузки в ответ на то, что беспилотное подводное транспортное средство погружено в воду дольше порогового времени для придания беспилотному подводному транспортному средству положительной плавучести в воде. Способ также включает отсоединение нагрузки в ответ на погружение беспилотного подводного транспортного средства в воду глубже максимальной глубины для придания беспилотному подводному транспортному средству положительной плавучести в воде.
[0007] В приведенном выше раскрытии изобретения обеспечено базовое понимание некоторых аспектов заявки. Данное раскрытие изобретения не является широким обзором заявки. Оно не предназначено для указания ключевых или важных элементов заявки или для ограничения объема конкретных вариантов реализации заявки или объема формулы изобретения. Его единственная цель представить некоторые концепции заявки в упрощенной форме в качестве вводной части более подробного описания, которое представлено ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Далее описаны некоторые варианты реализации исключительно в качестве примера и со ссылкой на прилагаемые чертежи. Одинаковые ссылочные номера обозначают одинаковые элементы или один тип элементов на всех чертежах.
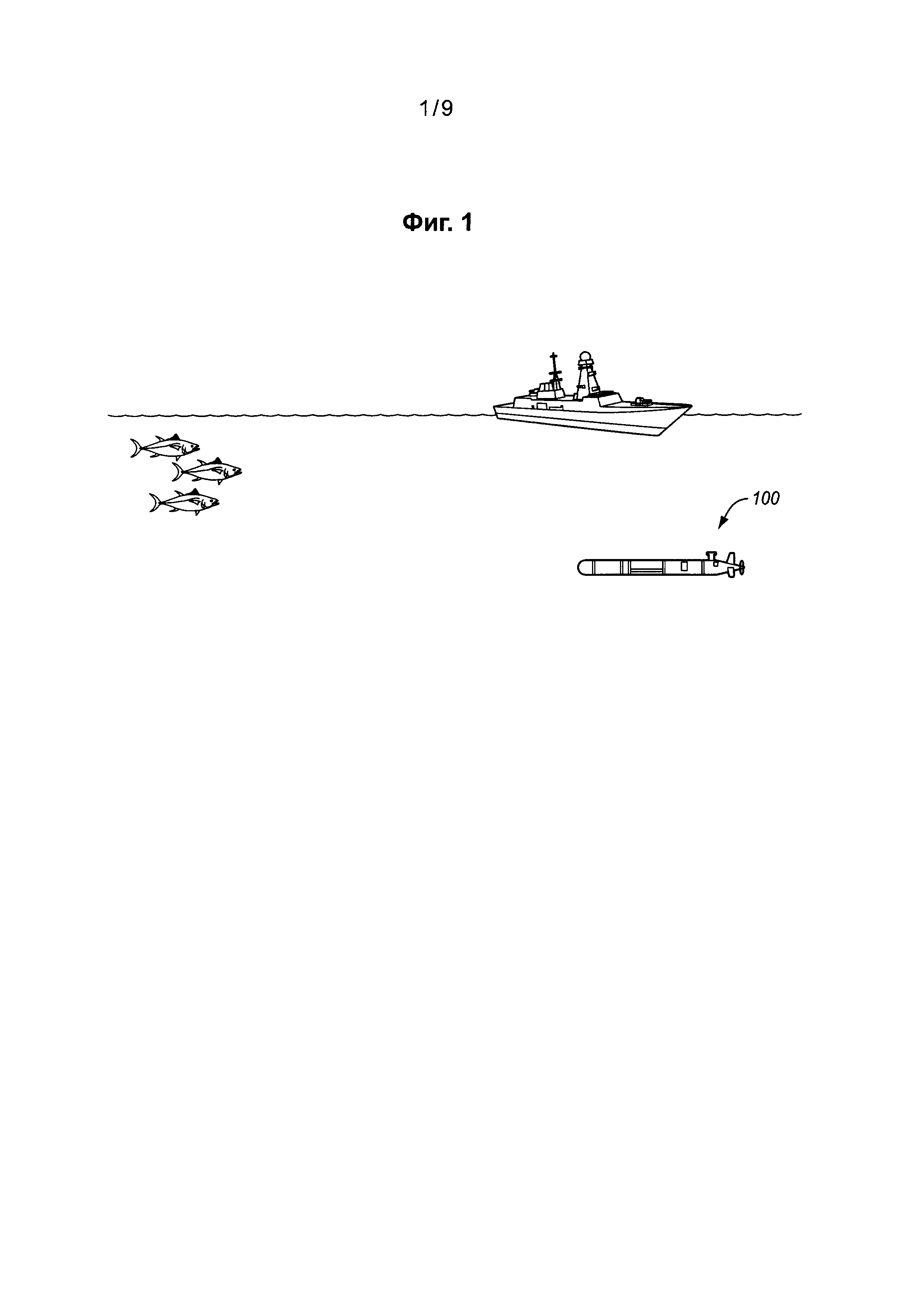
[0009] На фиг. 1 показано транспортное средство, в котором используется система возврата в соответствии с приведенным в качестве примера вариантом реализации.
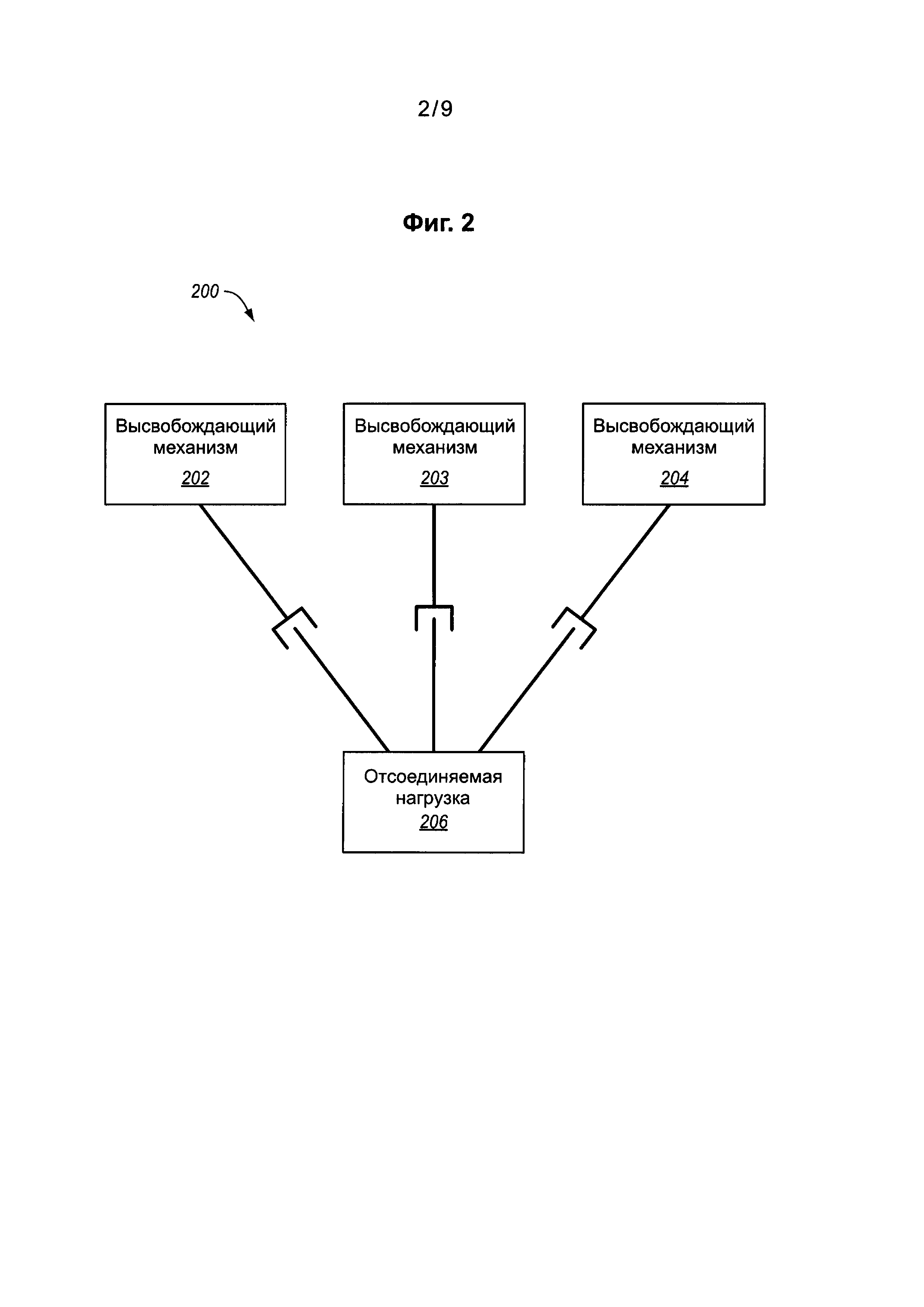
[0010] На фиг. 2 показана блок-схема системы возврата для транспортного средства по фиг. 1 в соответствии с приведенным в качестве примера вариантом реализации.
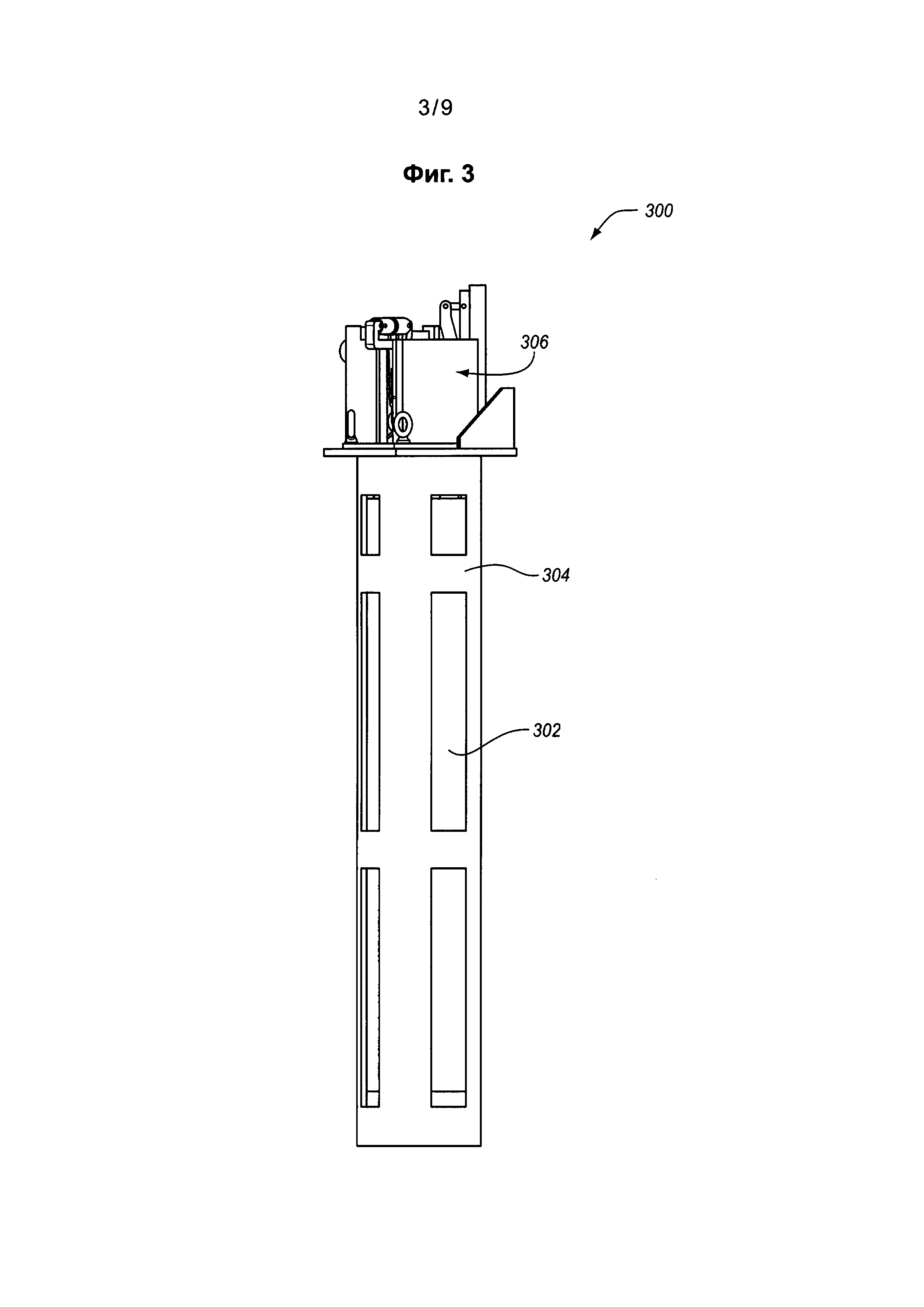
[0011] На фиг. 3 показан изометрический вид другой системы возврата для транспортного средства по фиг. 1 в соответствии с приведенным в качестве примера вариантом реализации.
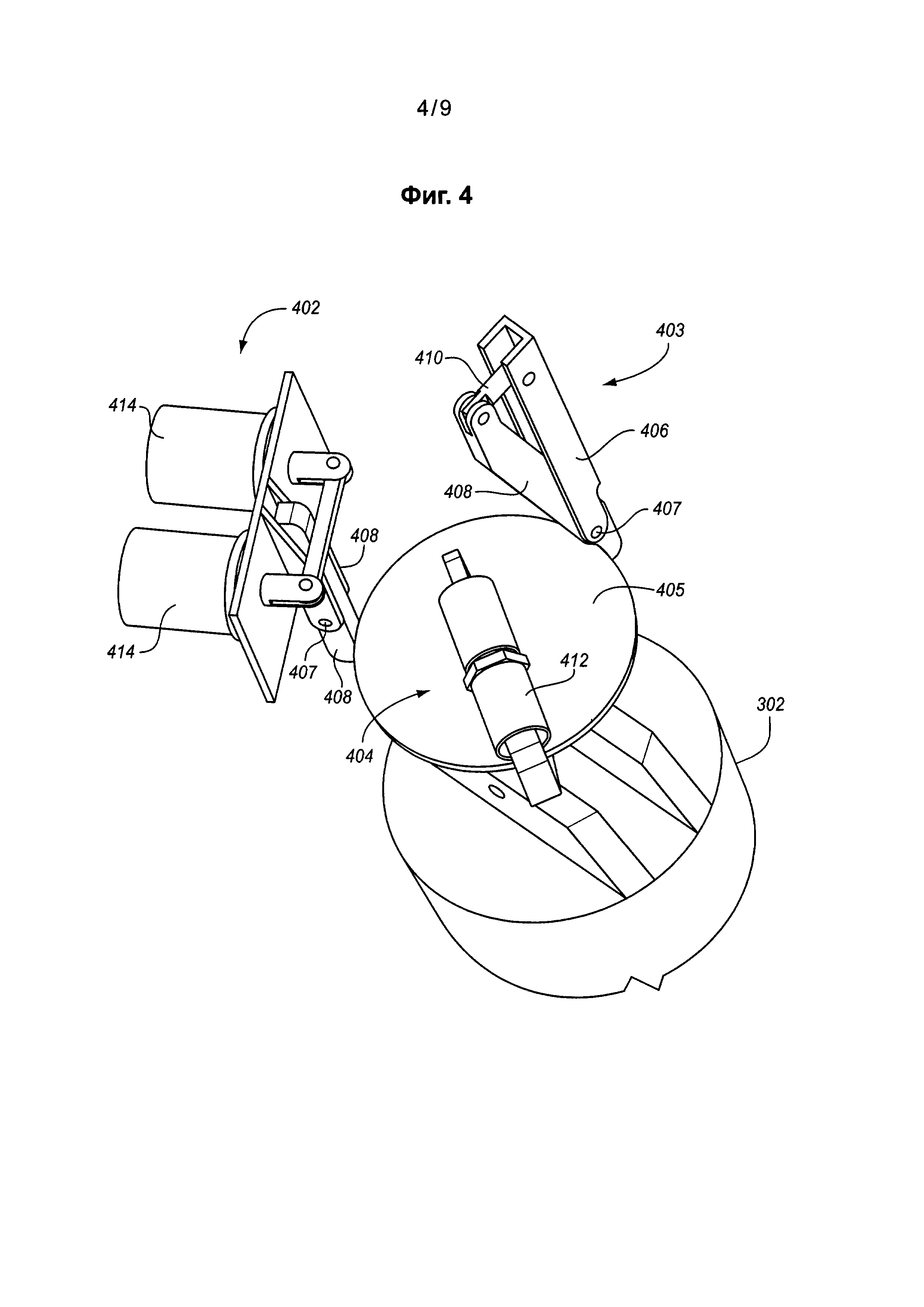
[0012] На фиг. 4 показан изометрический вид множества высвобождающих механизмов системы возврата по фиг. 3 в соответствии с приведенным в качестве примера вариантом реализации.
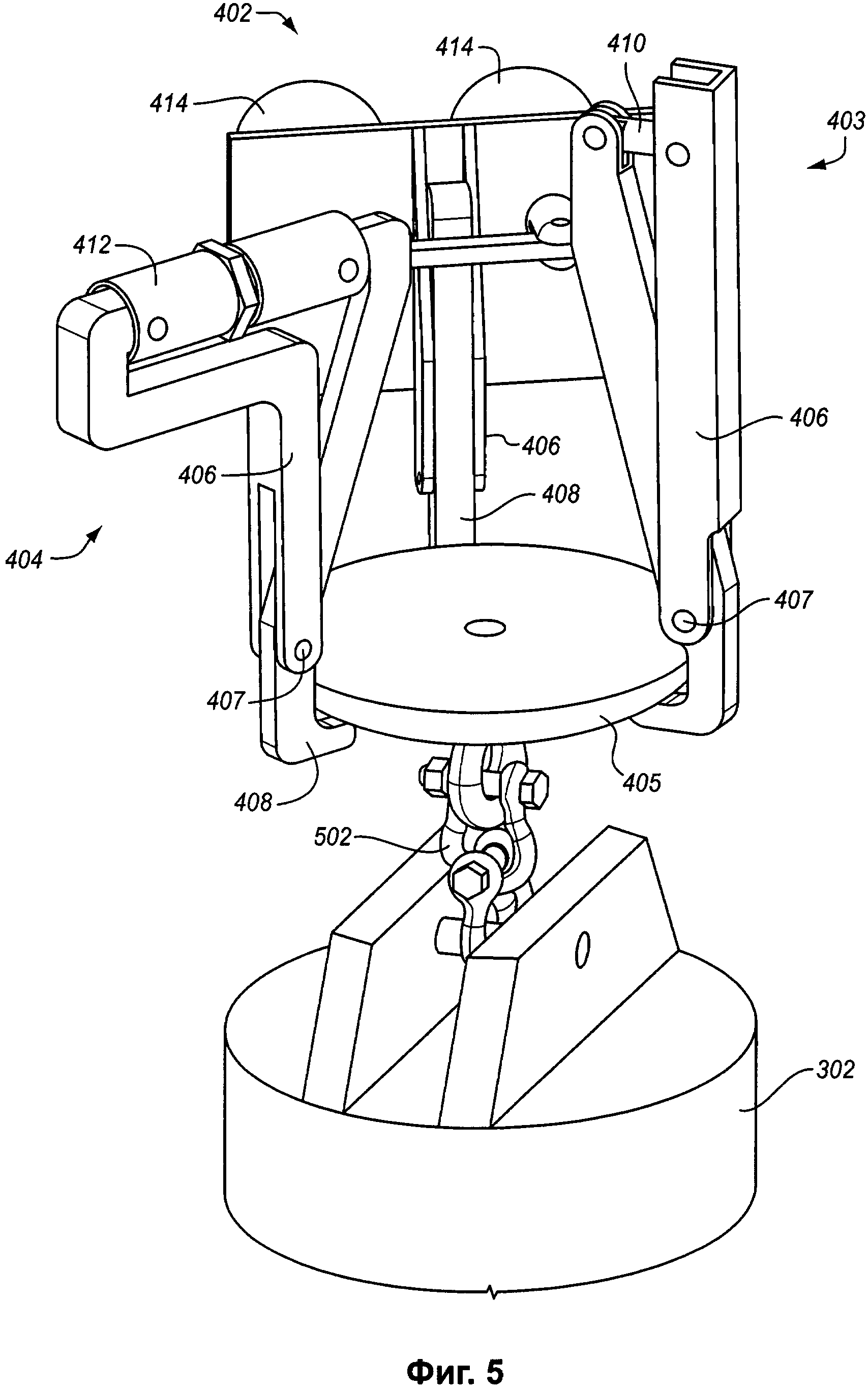
[0013] На фиг. 5 показан изометрический вид узла кабеля и диска системы возврата по фиг. 3 в соответствии с приведенным в качестве примера вариантом реализации.
[0014] На фиг. 6-8 показаны сценарий отсоединения нагрузки в приведенном в качестве примера варианте реализации.
[0015] На фиг. 9 показана блок-схема способа работы систем возврата по фиг. 2, 3 в соответствии с приведенным в качестве примера вариантом реализации.
Осуществление изобретения
[0016] Чертежи и нижеследующее описание иллюстрируют конкретные варианты реализации, приведенные в качестве примера. Очевидно, что специалист в данной области техники сможет придумать различные компоновки, которые, несмотря на то, что они не описаны и не показаны подробно в настоящем описании, воплощают принципы вариантов реализации и включены в объем вариантов реализации. Кроме того, любые примеры, описанные в настоящем описании, направлены на облегчение понимания принципов вариантов реализации и должны рассматриваться как неограниченные конкретными раскрытыми примерами или условиями. В результате, изобретательская(-ие) концепция(-ии) не ограничены конкретными вариантами реализации или примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
[0017] На фиг. 1 показано погружаемое транспортное средство 100, в котором используется система возврата в соответствии с приведенным в качестве примера вариантом реализации. В данном варианте реализации транспортное средство 100 показано как беспилотное подводное транспортное средство, хотя в других вариантах реализации транспортное средство 100 может представлять собой любой тип транспортных средств, которые выполнены с возможностью погружения под воду и использования системы возврата для обеспечения возврата транспортного средства 100 на поверхность, когда соблюдены различные условия возврата. Например, транспортное средство 100 может непреднамеренно погрузиться ниже заранее заданной глубины, что запустит систему возврата с целью возвращения транспортного средства 100 на поверхность. Транспортное средство 100 может превысить заранее заданное количество времени пребывания под водой, что запустит систему возврата с целью возвращения транспортного средства 100 на поверхность. Транспортное средство 100, или другой объект, может выработать командный сигнал, который запустит систему возврата с целью возвращения транспортного средства 100 на поверхность.
[0018] На фиг. 2 показана блок-схема системы 200 возврата для транспортного средства 100 по фиг. 1 в соответствии с приведенным в качестве примера вариантом реализации. В данном варианте реализации система 200 возврата содержит множество высвобождающих механизмов 202-204, которые механически соединены с выполненной с возможностью отсоединения нагрузкой 206. Нагрузка 206 может содержать часть транспортного средства 100 и/или сбрасываемый груз, которые выполнены с возможностью отсоединения от транспортного средства 100 в некоторых вариантах реализации. В данном варианте реализации нагрузка 206 обеспечивает транспортному средству 100 по существу нейтральную плавучесть в воде и обеспечивает транспортному средству 100 положительную плавучесть в воде, когда нагрузка 206 высвобождена с транспортного средства 100. Когда нагрузка 206 высвобождена, транспортное средство 100 имеет возможность всплытия на поверхность воды и возврата.
[0019] Высвобождающие механизмы 202-204 работают по существу независимо для обеспечения того, что нагрузка 206 отсоединяется от транспортного средства 100, когда соблюдены конкретные условия. Это обеспечивает возможность возврата транспортного средства 100. Высвобождающий механизм 202 в данном варианте реализации содержит любой компонент, систему или устройство, которые выполнены с возможностью отсоединения нагрузки 206 в ответ на командный сигнал. Командный сигнал может быть выработан транспортным средством 100 и/или другим объектом, таким как вспомогательное судно. Например, транспортное средство 100 может вырабатывать командный сигнал для отсоединения нагрузки 206, если транспортное средство 100 застряло и не имеет возможности подъема на поверхность (например, застряло в тине, запуталось в рыболовных снастях и т.д.).
[0020] Высвобождающий механизм 203 в данном варианте реализации содержит любой компонент, систему или устройство, которые выполнены с возможностью отсоединения нагрузки 206 в ответ на то, что транспортное средство 100 было погружено в воду дольше заранее определенного времени. Например, если транспортное средство 100 осталось без энергии и дрейфует под водой дольше заранее определенного количества времени, то высвобождающий механизм 203 приводится в действие для отсоединения нагрузки 206, что приводит к тому, что транспортное средство 100 всплывает на поверхность воды.
[0021] Высвобождающий механизм 204 в данном варианте реализации содержит любой компонент, систему или устройство, которые выполнены с возможностью отсоединения нагрузки 206 в ответ на то, что транспортное средство 100 погрузилось ниже максимальной глубины в воде. Например, если транспортное средство 100 осталось без энергии или приобрело отрицательную плавучесть, то транспортное средство 100 может погрузиться ниже заранее определенной глубины в воде. В данном случае высвобождающий механизм 204 приводится в действие для отсоединения нагрузки 206, что приводит к тому, что транспортное средство 100 всплывает на поверхность воды.
[0022] Так как высвобождающие механизмы 202-204 приводятся в действие независимо друг от друга для отсоединения нагрузки 206 и придают транспортному средству 100 положительную плавучесть, транспортное средство 100 имеет большую вероятность возврата на поверхность воды в ответ на множество возможных неполадок, которые в противном случае могут привести к утере транспортного средства 100.
[0023] На фиг. 3 показан изометрический вид другой системы 300 возврата транспортного средства 100 в соответствии с приведенным в качестве примера вариантом реализации. В данном варианте реализации система 300 возврата содержит множество высвобождающих механизмов (не видимых на данном виде), которые окружены корпусом 306. Корпус 306 системы 300 возврата прикреплен к оболочке 304, которая окружает выполненную с возможностью отсоединения нагрузку. В данном варианте реализации нагрузка 302 представляет собой сбрасываемый груз, хотя в других вариантах реализации нагрузка 302 может содержать часть (части) транспортного средства 100. Например, нагрузка 302 может представлять собой блок аппаратуры транспортного средства 100, устройства внешнего освещения транспортного средства 100 и т.д. Таким образом, не подразумевается, что нагрузка 302 в данном варианте реализации ограничена только сбрасываемыми грузами.
[0024] В данном варианте реализации нагрузка 302 выполнена с возможностью плавного перемещения в оболочке 304 и отсоединения от системы 300 возврата, когда соблюдены конкретные условия. Пока нагрузка 302 остается соединенной с системой 300 для возврата (которая представляет собой часть транспортного средства 100 или установлена на него), транспортное средство 100 имеет по существу нейтральную плавучесть. Это обеспечивает работу транспортного средства 100 под водой без испытывания ухудшения плавучести (например, в положительную или отрицательную сторону) при использовании системы 300 возврата. Однако когда нагрузка 302 сброшена, высвобождена, отсоединена и т.п., от системы 300 возврата (и, следовательно, от транспортного средства 100), транспортное средство 100 приобретает положительную плавучесть. Имея положительную плавучесть, транспортное средство 100 всплывает на поверхность воды, что обеспечивает возврат транспортного средства 100.
[0025] На фиг. 4 показан изометрический вид высвобождающих механизмов 402-404 системы 300 возврата по фиг. 3 в соответствии с приведенным в качестве примера вариантом реализации. На данном виде корпус 306 (см. фиг. 3) удален для обеспечения видимости высвобождающих механизмов 402-404. В данном варианте реализации каждый из высвобождающих механизмов 402-404 выполнен с возможностью независимой работы для отсоединения нагрузки 302 от системы 300 возврата. Высвобождающие механизмы 402-404 соединены с возможностью отсоединения с диском 405, который установлен на нагрузке 302. Однако, в других вариантах реализации, высвобождающие механизмы 402-404 могут быть соединены с возможностью отсоединения с нагрузкой 302 любым количеством способов в зависимости от выбора конструкции. Кроме того, хотя диск 405 изображен по существу круглым, диск 405 может содержать также и другие формы. Например, диск 405 может быть вытянутым, прямоугольным, треугольным и т.д. Диск 405 в некоторых вариантах реализации может называться пластиной распределения веса.
[0026] Высвобождающий механизм 402 в данном варианте реализации представляет собой активное высвобождение и выполнен с возможностью отсоединения нагрузки 302 от системы 300 возврата в ответ на прием командного сигнала. Например, транспортное средство 100 может вырабатывать командный сигнал для отсоединения нагрузки 302 от системы 300 возврата. Высвобождающий механизм 402 содержит пару резервных приводных катушек 414, которые используют для высвобождения нагрузки 302, хотя в других вариантах реализации может быть использована только одна катушка 414. Транспортное средство 100 или другой объект, такой как корабль или оператор, может выработать командный сигнал для высвобождения нагрузки 302 в случаях, когда транспортное средство 100 не имеет возможности возврата на поверхность. Например, если двигательная установка транспортного средства 100 выходит из строя, то транспортное средство 100 может вырабатывать командный сигнал, приводящий в действие катушки 414. Катушки 414 механически соединены с фиксированным плечом 406 (которое может быть связано с корпусом 306) и удерживают подвижное плечо 408 на месте до тех пор, пока катушки 414 не приведут в действие. Подвижное плечо 408 соединено с возможностью поворота с фиксированным плечом 406 посредством штыря 407. При приведении в действие, подвижное плечо 408 поворачивается из положения по штырю 407, соединенному с фиксированным плечом 408, что вызывает отсоединение подвижного плеча 408 от диска 405 и высвобождает нагрузку 302 от оболочки 304. Это придает положительную плавучесть транспортному средству 100 и обеспечивает всплытие транспортного средства 100 на поверхность воды для возврата.
[0027] Высвобождающий механизм 403 в данном варианте реализации представляет собой пассивное высвобождение и выполнен с возможностью отсоединения нагрузки 302 от системы 300 возврата в ответ на то, насколько долго система возврата (и, следовательно, транспортное средство 100) находится в воде и/или под водой. Высвобождающий механизм 403 может содержать ломкую перемычку 410, которая подвержено действию коррозии в соленой воде с известной величиной. Когда перемычка 410 ломается, подвижное плечо 408 поворачивается относительно фиксированного плеча 405 (которое может быть связано с корпусом 306) на штыре 407, что приводит к отсоединению подвижного рычага 408 от диска 405 и обеспечивает высвобождение нагрузки 302 от оболочки 304. Например, если транспортное средство 100 осталось без энергии, запуталось или застряло под водой, перемычка 410 в итоге подвергается коррозии до тех пор, пока перемычка 410 не сломается, что приведет к отсоединению нагрузки 302 от системы 300 возврата. Это придает положительную плавучесть транспортному средству 100, которое может всплыть на поверхность и его можно вернуть.
[0028] Высвобождающий механизм 404 в данном варианте реализации представляет собой другое пассивное высвобождение и выполнен с возможностью отсоединения нагрузки 302 от системы 300 возврата в ответ на то, что система 300 возврата (и, следовательно, транспортное средство 100) превышает максимальную глубину. Высвобождающий механизм 404 может содержать разрывную заглушку 412 или другое устройство, которое приводится в действие в ответ на приложение давления. Например, если транспортное средство 100 погружается ниже заранее заданной глубины в воде, разрывная заглушка 412 разрывается и приводит к высвобождению нагрузки 302 от системы 300 возврата. Это придает положительную плавучесть транспортному средству 100 и обеспечивает всплытие транспортного средства 100 на поверхность воды и его возврат. Особенности функционирования высвобождающего механизма 404 описаны со ссылкой на фиг. 5.
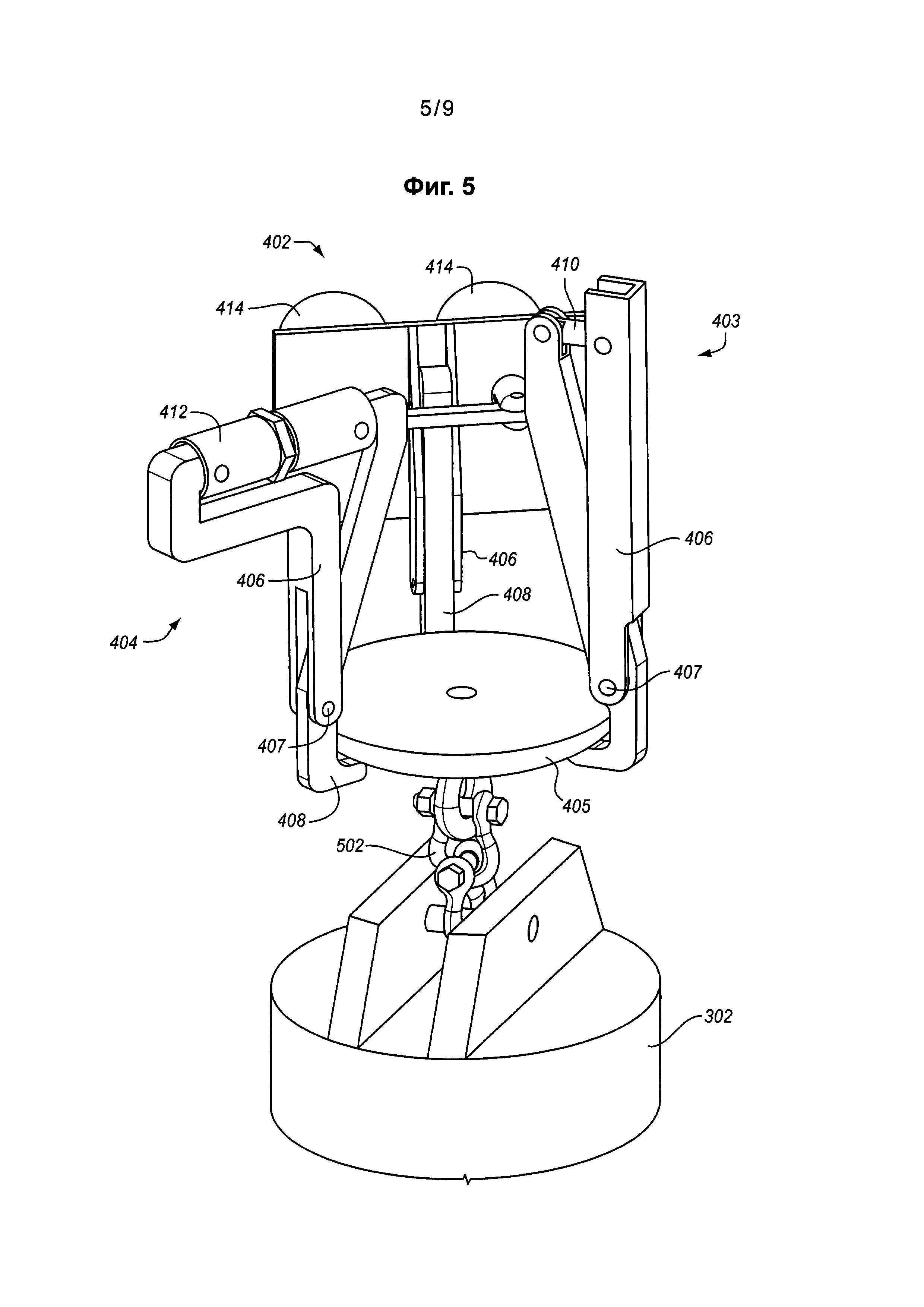
[0029] На фиг. 5 показан изометрический вид узла кабеля 502 и диска 405 системы возврата по фиг. 3 в соответствии с приведенным в качестве примера вариантом реализации. На данном виде более ясно показана связь между диском 405 и подвижными плечами 408. Подвижные плечи 408 содержат крючкообразную часть, которая обеспечивает возможность удержания или захвата диска 405 на месте до тех пор, пока любое из подвижных плеч 408 не повернется из своего положения. Нагрузка 402 на данном виде соединена с диском 405 с использованием соединения и/или кабеля 502. Это обеспечивает возможность подвешивания нагрузки 402 посредством кабеля 502 и то, что она остается частью системы 300 возврата, пока диск 405 не сброшен или наклонен из своего положения между подвижными плечами 408. Хотя на фиг. 5 показано, что подвижные плечи 408 расположены приблизительно равноудаленно вокруг диска 405, могут существовать и другие конфигурации. Обратимся снова к высвобождающему механизму 404, разрывная заглушка 412 соединяет подвижное плечо 408 с фиксированным плечом 406 (которое может быть связано с корпусом 306) до тех пор, пока разрывная заглушка 412 не порвется. В ответ на разрыв разрывной заглушки 412, подвижное плечо 408 поворачивается из своего положения относительно фиксированного плеча 406 вокруг штыря 407, что приводит к отсоединению подвижного рычага 408 от диска 405 и обеспечивает высвобождение нагрузки 302 от оболочки 304.
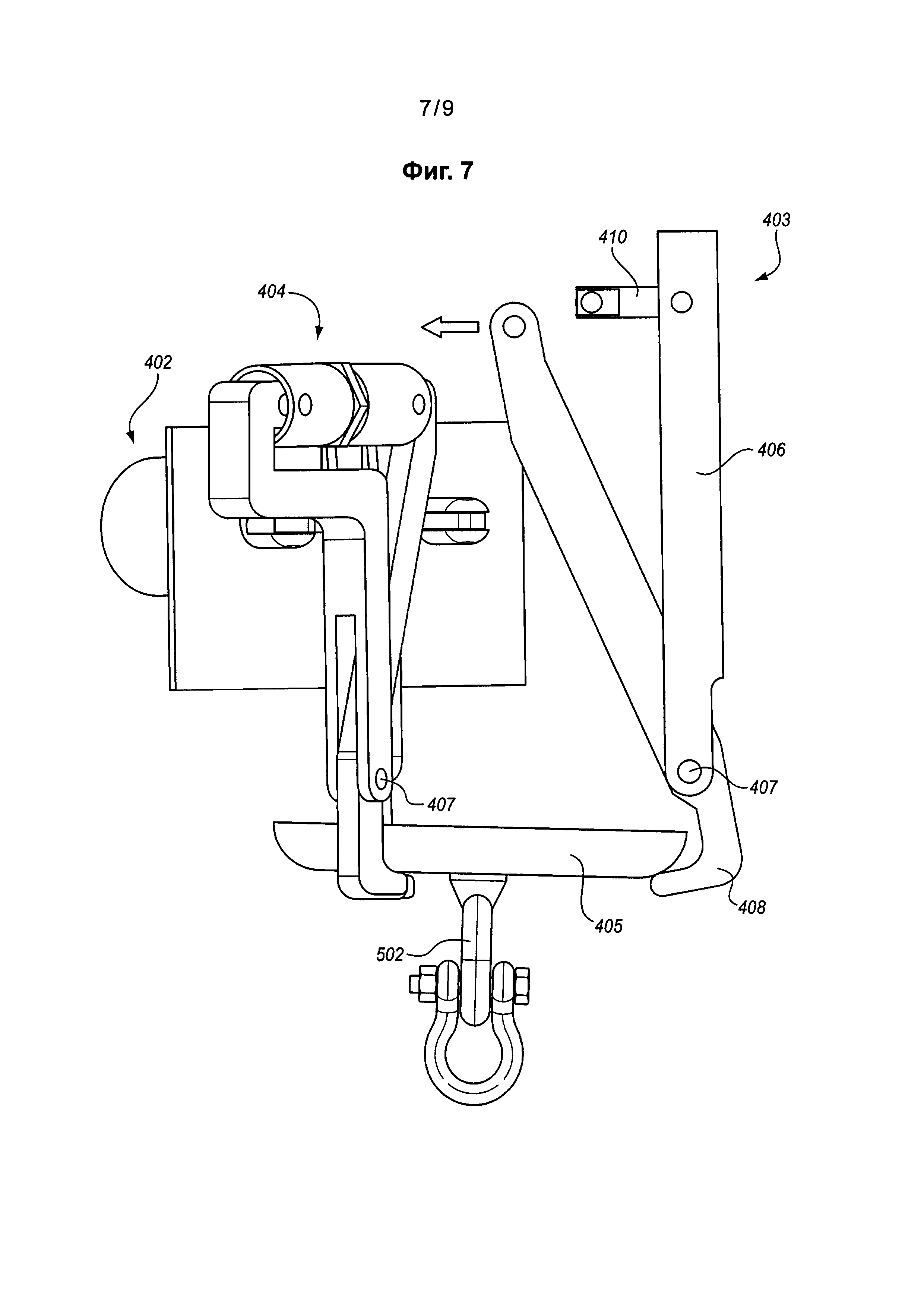
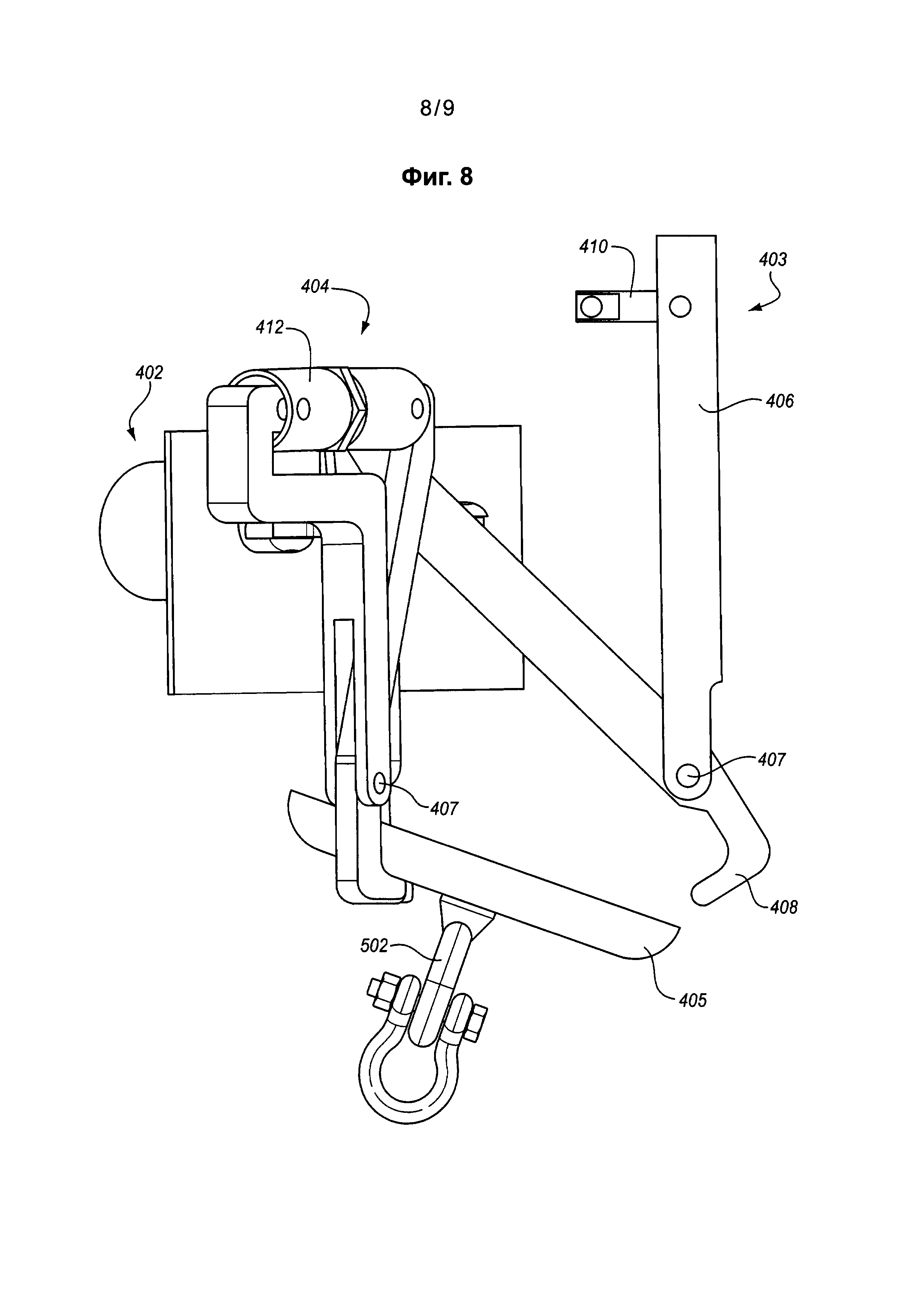
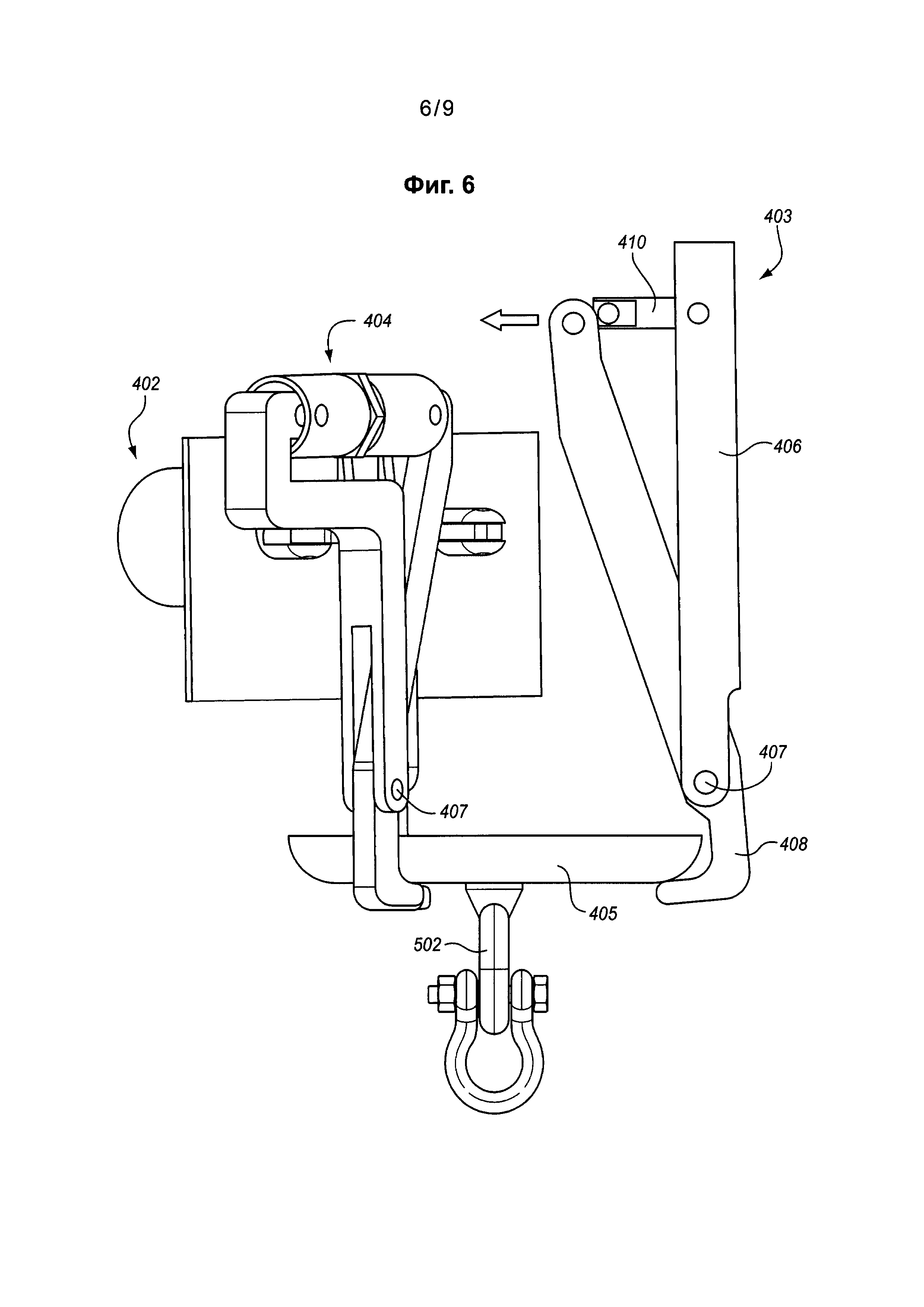
[0030] На фиг. 6-8 показан сценарий отсоединения нагрузки 302 в приведенном в качестве примера варианте реализации. Хотя на фиг. 6-8 показано приведение в действие высвобождающего механизма 403, который основан на количестве времени, которое транспортное средство 100 находится в воде и/или под водой, любой из других механизмов 404-405 может работать схожим образом для обеспечения поворота диска 405 из его положения и высвобождения нагрузки 302 от системы 300 возврата.
[0031] На фиг. 6 перемычка 410 показана как высвобождающее подвижное плечо 408, которое поворачивает подвижное плечо 408 в направлении налево по фиг. 6 вокруг штыря 407. При повороте подвижного плеча 408 теряется захват диска 405. Диск 405 начинает наклоняться, как показано на фиг. 7. При наклоне диска 405 и при потере захвата (см. фиг. 8), диск 405 становится неустойчивым и может плавно перемещаться из своего положения между подвижными плечами 408 для каждого из высвобождающих механизмов 402-404. Так как диск 405 механически соединен с нагрузкой 302 посредством кабеля 502, нагрузка 302 выполнена с возможностью сброса от системы 300 возврата, что затем придаем транспортному средству 100 положительную плавучесть. Транспортное средство 100 затем может всплыть на поверхность воды для возврата.
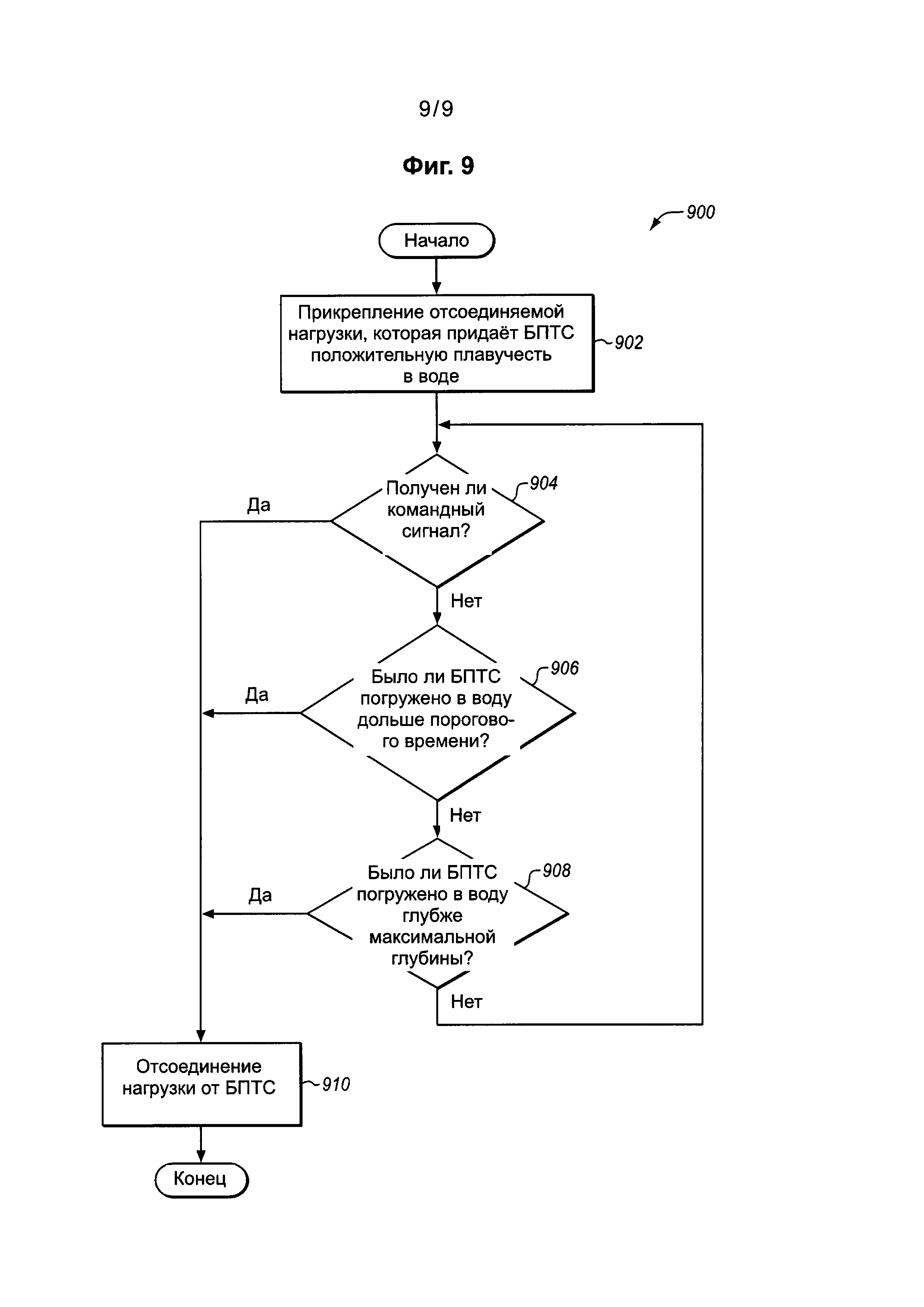
[0032] Одно преимущество системы 300 возврата состоит в том, что она содержит множество независимых высвобождающих механизмов 402-404, каждый из которых выполнен с возможностью высвобождения нагрузки 302 и обеспечения всплытия транспортного средства 100 на поверхность. На фиг. 9 показана блок-схема способа 900 работы системы возврата по фиг. 2-8 в соответствии с приведенным в качестве примера вариантом реализации. Этапы способа 900 будут описаны в отношении системы 200 возврата; хотя специалисту в области техники будет ясно, что способ 900 может быть выполнен другими устройствами или системами, которые не показаны. Этапы способа 900 не являются исключающими и могут включать другие этапы, которые не показаны. Кроме того, этапы могут быть выполнены в другом порядке.
[0033] На этапе 902, выполненная с возможностью отсоединения нагрузка (например, нагрузка 206) прикреплена к беспилотному подводному транспортному средству (например, транспортному средству 100). Нагрузка может представлять собой часть беспилотного подводного транспортного средства и/или сбрасываемый груз, или некоторую их комбинацию. На этапе 904, если был принят командный сигнал, то нагрузку отсоединяют от беспилотного подводного транспортного средства на этапе 910 и беспилотное подводное транспортное средство всплывает на поверхность. Если командный сигнал не был принят, то выполняют этап 906. На этапе 906, если беспилотное подводное транспортное средство было погружено под воду дольше временного предела, то нагрузку отсоединяют на этапе 910 и беспилотное подводное транспортное средство всплывает на поверхность. Если беспилотное подводное транспортное средство не было погружено дольше временного предела, то выполняют этап 908. На этапе 908, если беспилотное подводное транспортное средство было погружено под воду ниже заранее определенной глубины, то нагрузку отсоединяют на этапе 910 и беспилотное подводное транспортное средство всплывает на поверхность. Этапы 904-908 могут быть выполнены почти одновременно. Если ни одно из указанных ранее условий отсоединения нагрузки не произошло, то нагрузка может не быть отсоединена от беспилотного подводного транспортного средства.
[0034] Хотя в настоящем описании описаны конкретные варианты реализации, объем изобретения не ограничен этими вариантами реализации. Наоборот, объем определен нижеследующей формулой изобретения и любыми ее эквивалентами.
Активатор для управления потоком плазмы и способ управления потоком плазмы
Устройство и способ управления потоком плазмы на задней кромке аэродинамического профиля
Система управления потоком с использованием плазменного актуатора и способ ее использования для управления потоком, обтекающим оружейный отсек высокоскоростного подвижного носителя
Усиленные элементы жесткости и способ их изготовления
Нагнетательное насосное устройство с диэлектрическим барьером и способ формирования такого устройства
Система с датчиками
Регистрация радиолокационных импульсов посредством цифрового радиолокационного приемника
Полурычажное шасси и способ размещения балки тележки такого шасси
Инструмент в виде шаблона и способ для быстрого ремонта композитной структуры
Малошумящая система предкрылка с элеметами, размещенными в передней кромке крыла и выполненными с возможностью развертывания

