Результат интеллектуальной деятельности: Способ точного сопровождения по углу места низколетящей цели в условиях интерференции
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано для точного сопровождения по углу места низколетящей цели корабельной радиолокационной станцией (РЛС), построенной на активных фазированных антенных решетках (АФАР) с цифровым диаграммообразованием в условиях интерференции над отражающей подстилающей поверхностью (морем).
Уровень техники
Наличие зеркального отражения от морской поверхности вносит существенные ошибки измерения малых углов места цели. На апертуре антенны складываются два фронта электромагнитной волны. Один приходит с направления от цели, а другой из точки зеркального отражения морской поверхностью. Разность фаз этих волн зависит от разности длин прямого и зеркально отраженного луча. В таких условиях ошибки измерения угла места могут достигать значения три четверти ширины диаграммы направленности антенны (ДНА) по уровню -3 дБ.
В настоящее время известен ряд методов, позволяющих измерять высоту низколетящей цели в условиях интерференции. Например, описанный в [RU 2392638С1] способ, высокоточного измерения угла места основанный на сканировании цели интерференционными лепестками при изменении несущей частоты. Однако данный способ работает только на относительно больших углах скольжения электромагнитной волны зондирующего сигнала [W.D. White Low-angle radar tracking in the Presence of Multipath. - IEEE Trans. on Aerospace and Electronic Systems, 1974, v. 10, №6, p. 835-852] и не может использоваться корабельной РЛС по маловысотным целям.
В [RU 2444750С2] приведен способ предполагающий использование четырех парциальных диаграмм, формируемых отдельным диаграммообразующим устройством в специальным образом расположенных субапертурах антенны. Это требует дополнительных аппаратных затрат и не всегда может быть реализовано в условиях дефицита пространства при размещении РЛС на корабле.
Ближайшим аналогом настоящего изобретения является метод, описанный в [W.D. White Low-angle radar tracking in the Presence of Multipath. - IEEE Trans, on Aerospace and Electronic Systems, 1974, v.10, №6, p.835-852]. В данном методе при измерении угла места используется специализированная разностная ДНА.
Использование цифровых приемных решеток позволяет одновременно формировать несколько приемных диаграмм. В таком случае использование суммарных (карандашных) диаграмм для измерения углов на цель представляется предпочтительнее. Суммарные диаграммы одновременно с измерением угла могут использоваться и для обнаружения, а ошибки измерения суммарными и разностными диаграммами примерно одинаковы. Кроме того, если РЛС предназначается для работы в условиях противодействия путем постановки активных шумовых помех, то в одном из каналов автокомпенсатора помех предпочтительно использовать разностную диаграмму, соосную с защищаемой приемной диаграммой. При этом достигается наименьший по углу размер зоны подавления РЛС помехой и наименьшие, вызванные помехой, ошибки измерения угла на цель. Так как защищаемая и компенсационная диаграммы не могут быть одинаковыми, то измерение разностными диаграммами исключается.
Раскрытие сущности изобретения
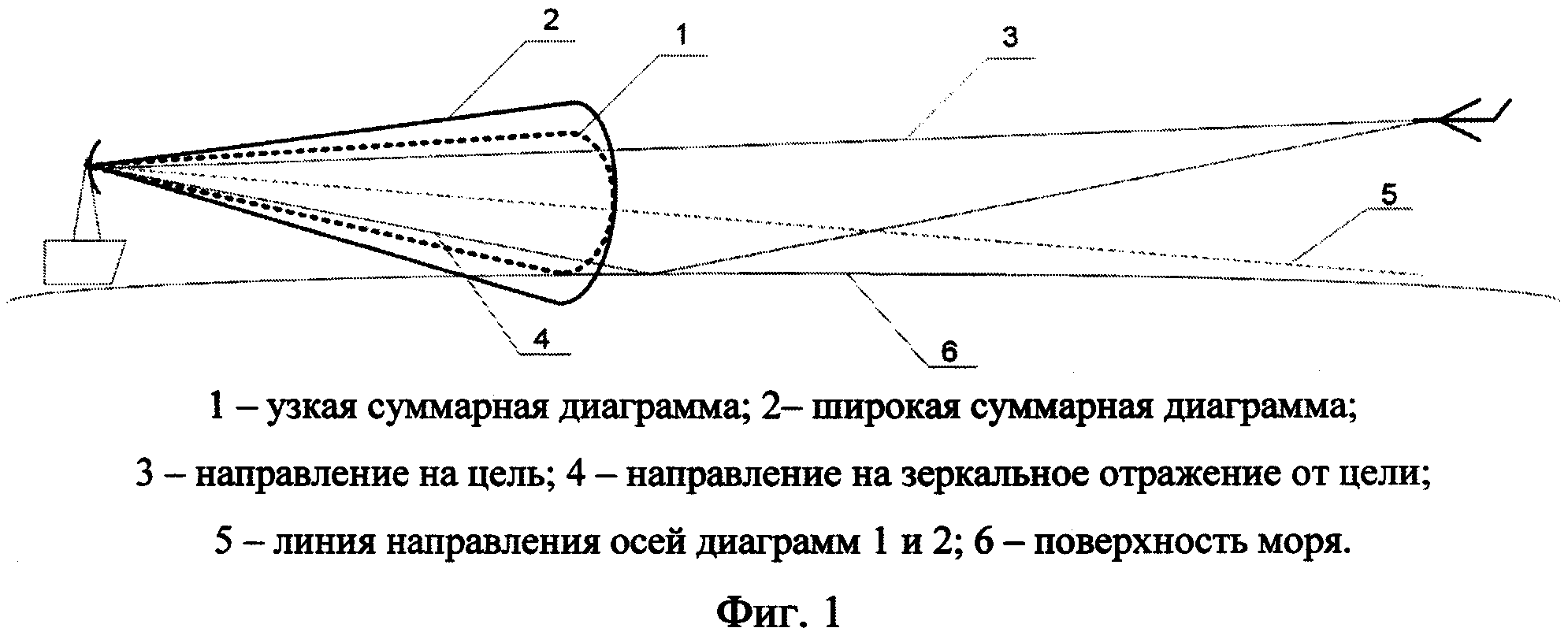
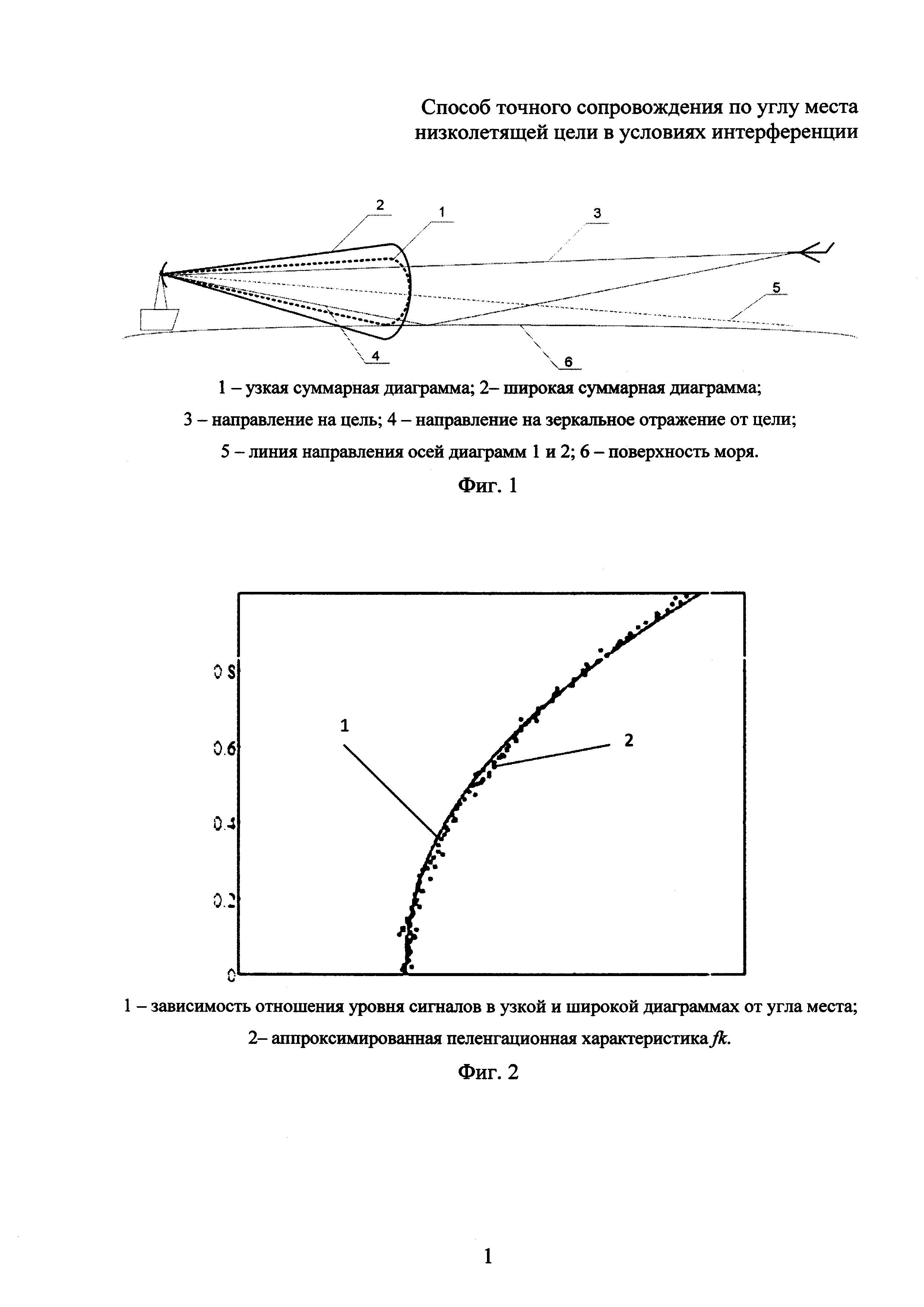
Предлагаемый способ точного сопровождения по углу места основан на использовании специальных суммарных приемных диаграмм - узкой и широкой (1 и 2 соответственно на фиг. 1). Принципиальных требований к диаграммам в вертикальной плоскости три: соосность, симметричность и монотонность (в пределах главного лепестка) изменения отношения усиления приемных диаграмм при удалении от оси диаграмм. Оси диаграмм направлены по линии 5, проходящей посередине между направлением на цель 3 и направлением на ее зеркальное отражение 4 от поверхности моря 6. Для уравнивания коэффициентов усиления широкой и узкой диаграмм сигналы в одной из них умножаются на постоянный коэффициент. В дальнейшем считаем, что усиление диаграмм одинаково. Если коэффициенты усиления в максимумах диаграмм равны, то отношение или нормированная разность между сигналами, принятыми широкой - a1 и узкой - а2 диаграммами будет зависеть только от угла между направлением на цель 3 и направлением на ее зеркальное отражение 4.
Индикаторная функция ind, определяемая соотношением модулей амплитуд сигналов от цели в широкой и узкой диаграммах определяется по формуле (1). Поскольку амплитуды a1 и а2 при установке ДНА в определенном направлении в вертикальной плоскости зависят от текущей дальности до цели, индикаторная функция также будет функцией от дальности:

где kw - отношение коэффициентов усиления широкой и узкой диаграмм.
Среднеквадратическая ошибка (СКО) определения индикаторной функции рассчитывается по формуле (2):

где ρ - коэффициент корреляции шумов в узкой и широкой ДНА;
kn - отношение уровня шума в узкой ДНА, к уровню шума в широкой ДНА.
По результатам стендовых обмеров приемных диаграмм подбираются параметры аппроксимации индикаторной функции, для расчета пеленгационной характеристики fk(ind), т.е. зависимость угла на цель относительно оси диаграмм от отношения амплитуд сигналов в них. При этом на первом этапе оценивается отношение сигналов в узкой и широкой диаграммах в зависимости от направления на цель по углу места в свободном пространстве. На втором этапе аппроксимируется обратная зависимость угла места от соотношения амплитуд в диаграммах, т.е. от индикаторной функции ind(R). Данная зависимость и является пеленгационной характеристикой fk(ind), определяемой размерами и формами узкой и широкой ДНА. На фиг. 2 показан пример пеленгационной характеристики fk(ind) для случая использования в качестве узкой диаграммы ДНА равномерной апертуры, в качестве широкой - ДНА с косинусной весовой функцией в раскрыве. При этом линией 1 показана прямая зависимость индикаторной функции от угла места, линией 2 - подобранная аппроксимация пеленгационной характеристики от соотношения уровня сигналов в узкой и широкой диаграммах. Аналитически аппроксимация пеленгационной характеристики для данного примера описывается формулой (3). 
где fk1 определяется по формуле (4).

где λ - длина волны РЛС;
Sizeh - раскрыв антенны по вертикали;
Θn - угол нормали антенны в вертикальной плоскости.
Условием измерения является установка диаграмм посередине прямого и отраженного лучей. Угол наклона осей ДНА рассчитывается на основании информации о высоте и дальности до цели. Следовательно, максимальную точность способ может обеспечить только в процессе сопровождения с использованием экстраполированных данных.
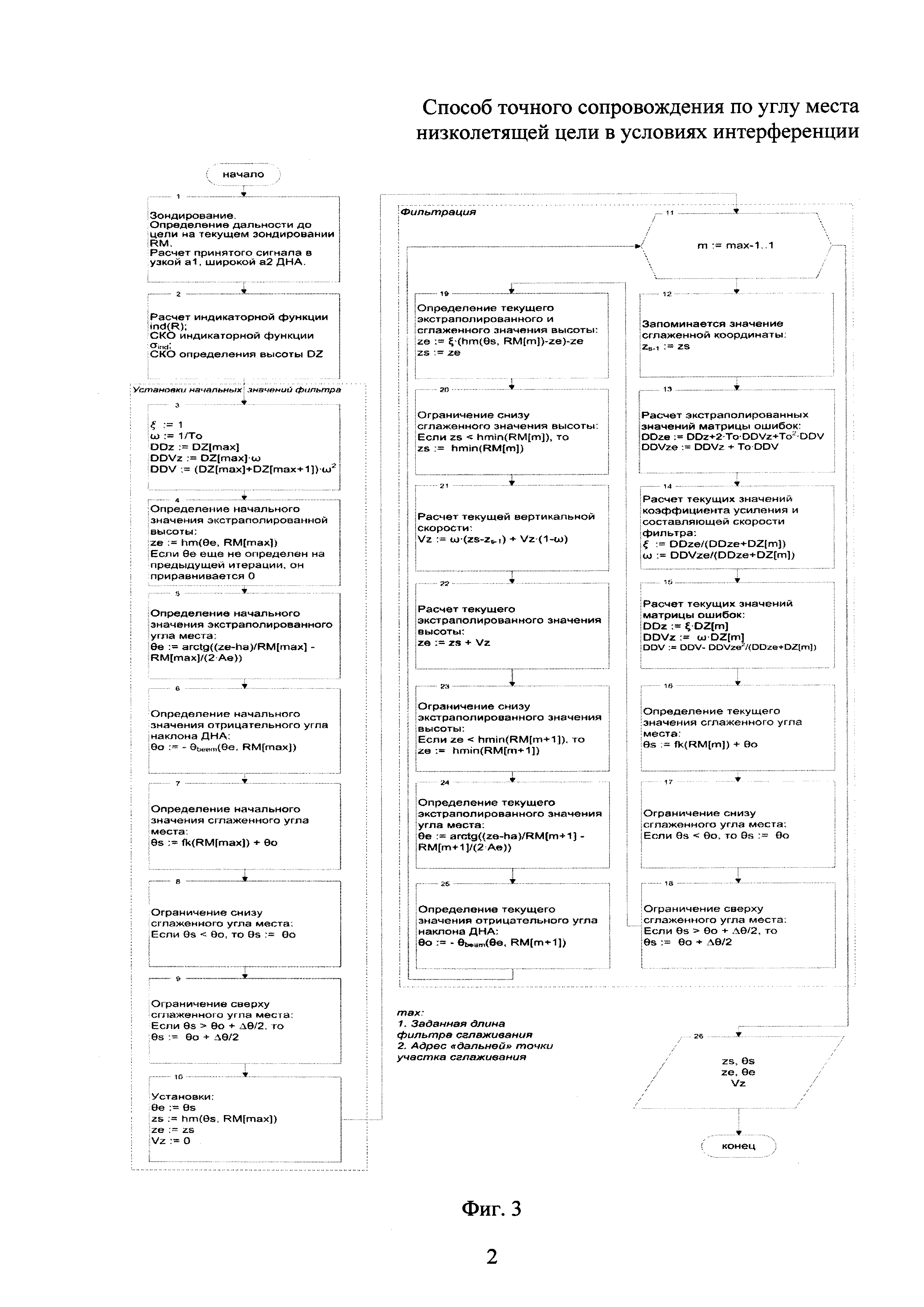
Для сопровождения используется рекурсивный алгоритм, блок-схема которого приведена на фиг. 3. Фильтрация производится по точкам, каждая из которой соответствует зондированию цели РЛС. Исходя из требований по точности сопровождения и распознаванию маневра цели выбирается постоянная времени фильтра, которой соответствует определенное количество точек. Сглаживание производится одновременно по высоте и углу места. Точка, для которой вычисляются текущие сглаженные значения угла места и высоты имеет индекс «1», а дальняя от нее точка участка сглаживания - индекс «max». Таким образом, система обработки должна сохранять в памяти массив данных для каждой точки участка сглаживания, необходимых для работы фильтра.
Начальные значения матрицы ошибок определяются для точки «max». Матрица ошибок фильтра использует СКО определения угла места и высоты. СКО малых значений угла места Dθ будет равна его текущему измеренному значению. СКО определения высоты DZ рассчитывается по формуле (5):

Алгоритм точного сопровождения по углу места имеет границы применения. По высоте он ограничен снизу значением 5 метров. По углу места: снизу - значением отрицательного угла наклона ДНА, определяемого по формуле (6), сверху - половиной ширины узкого луча ДНА. Возможна установка ограничения на минимально допустимое отношение сигнал/шум. Данное ограничение не является обязательным, но при малых отношениях сигнал/шум (менее 22-23 дБ) эффективность работы алгоритма не превышает сглаживание измеренного в РЛС значения высоты обычными методами.
Пошаговое описание работы алгоритма точного сопровождения по углу места, показанного на фиг. 3 приведено ниже.
1. Узкая и широкая ДНА в вертикальной плоскости устанавливаются на угол θbeam, находящийся посередине, между экстраполированным значением угла места θе, определенным на предыдущей итерации работы фильтра и зеркальным отражением сигнала от цели. Для первой итерации ДНА может устанавливаться в положение 0°. Производится зондирование цели РЛС.
Входные данные алгоритма: дальность до цели RM и уровень отраженного сигнала в узкой a1 и широкой а2 диаграммах вычисляются на каждом зондировании.
2. По входным данным рассчитываются индикаторная функция ind (1), СКО индикаторной функции σind (2) и СКО определения высоты цели в РЛС DZ(5).
3. Начальные значения матрицы ошибок фильтра сопровождения устанавливаются в блоке 3.
4. Определяется высота цели в точке экстраполяции по формуле (6):

где ha - высота антенны РЛС;
R - расстояние от РЛС до цели;
Θе - экстраполированное значение угла места, рассчитывается в фильтре сопровождения;
Ае - эквивалентный радиус Земли;
hmin(R) - минимально наблюдаемая высота цели, ограниченная 5 метрами, определяется по формуле (7).

5. По значению высоты цели в точке экстраполяции уточняется значение θе в блоке 5.
6. Отрицательный угол наклона оси ДНА (в градусах), как функция от экстраполированного угла места и дальности до цели определяется по эмпирической формуле (8):

7. По рассчитанному в блоке 2 значению индикаторной функции определяется пеленгационная характеристика fk (3). С учетом того, что аргументом индикаторной функции является дальность до цели, пеленгационная характеристика также рассчитывается в зависимости от дальности (fk(R) эквивалентна fk(ind(R))). Сглаженное значение угла места θs определяется в блоке 7 с учетом θbeam(θе, R).
8. В блоках 8 и 9 устанавливаются ограничения на величину θs.
9. В блоке 10 устанавливаются входные параметры рекурсивного алгоритма сглаживания: экстраполированное и сглаженное значения угла места, экстраполированное и сглаженное значения высоты. Вертикальная составляющая скорости цели Vz приравнивается нулю.
10. Поскольку входные параметры установлены для точки max, работа рекурсивного алгоритма начинается с точки max-1. Выходные параметры должны быть получены для точки «1», т.е. для текущего зондирования.
11. В блоке 12 запоминается текущее сглаженное значение высоты.
12. В блоках 13 и 14 рассчитываются экстраполированные значения матрицы ошибок и уточняются значения коэффициента усиления и составляющей скорости фильтра для текущей точки сглаживания. Данные параметры используются в дальнейшем для определения вертикальной составляющей скорости Vz.
13. В блоке 15 обновляются параметры матрицы ошибок для текущей точки сглаживания.
14. В блоках 16-18 повторяются действия, описанные на шагах 7, 8.
15. В блоке 19 уточняются экстраполированное и сглаженное значения высоты цели для текущей точки сглаживания.
16. Ограничение снизу для сглаженного значения высоты устанавливается в блоке 20.
17. В блоке 21 определяется вертикальная составляющая скорости цели Vz с учетом сглаженного значения высоты, полученного на шаге 11.
18. В блоке 22 из сглаженного значения высоты и вертикальной составляющей скорости рассчитывается экстраполированное значение высоты цели для следующей точки сглаживания.
19. Ограничение снизу для экстраполированного значения высоты устанавливается в блоке 23.
20. В блоке 24 рассчитывается экстраполированное значение угла места для следующей точки сглаживания.
21. В блоке 25 рассчитывается отрицательный угол наклона θbeam для установки осей ДНА на следующее зондирование.
22. Шаги 11-21 повторяются для каждой точки участка сглаживания.
Краткое описание чертежей
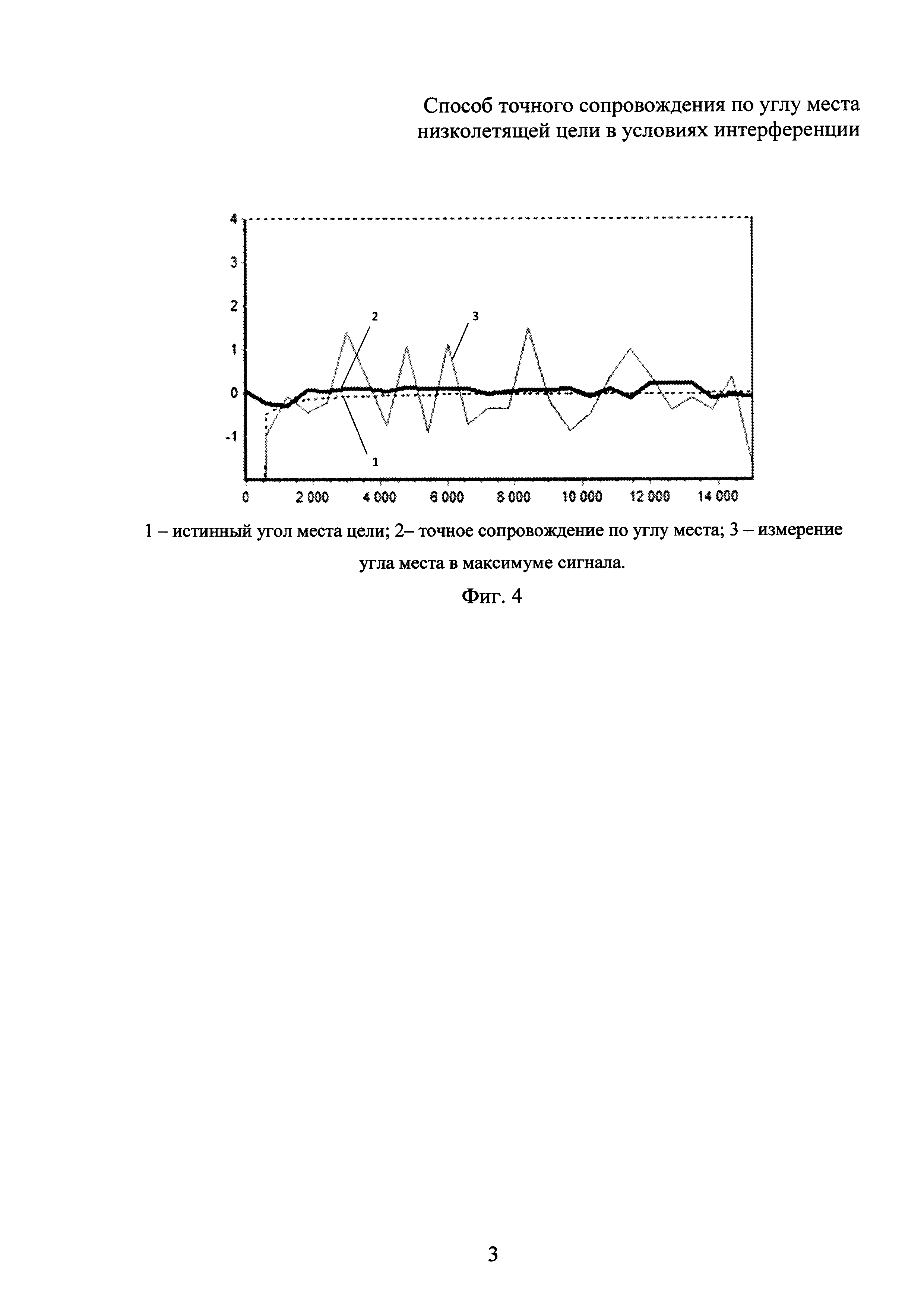
На фиг. 1 в графическом виде показан способ точного измерения угла места с использованием двух суммарных диаграмм. На фиг. 2 представлена пеленгационная характеристика fk в зависимости от соотношения амплитуд сигналов в широкой и узкой ДНА. На фиг. 3 представлена блок-схема алгоритма точного сопровождения по углу места. На фиг. 4 показаны результаты моделирования точного сопровождения по углу места в сравнении с измерением в максимуме сигнала и истинным углом места.
Осуществление изобретения
Предлагаемое изобретение может быть внедрено в любую РЛС, построенную на АФАР с цифровым диаграммообразованием. Дополнительной аппаратуры для внедрения данного изобретения не требуется. Алгоритм точного сопровождения по углу места и управления ДНА может быть реализован программными средствами.
Результаты моделирования с использованием способа точного сопровождения по углу места для РЛС с длиной волны 10 см, цели с ЭПР 0,1 м2, скоростью 300 м/с, на высоте 15 м при волнении моря 0 баллов в сравнении с измерением угла места в максимуме сигнала показаны на фиг. 4. Период зондирования цели - 2 с, постоянная времени фильтра - 10 с.
Технический результат - обеспечение высокой точности измерения угла места низколетящей цели в условиях интерференции. Так, на РЛС с диаграммой направленности по углу места более 5° достигается уровень ошибок порядка 5 т.д.






Уплотнение автономного поршня бинарного двс
Система обнаружения пожарной опасности и пожара в отсеке подводной лодки
Способ достроения измеренной части профиля вертикального распределения скорости звука в воде до поверхности и до дна
Устройство для исследования гидрофизических характеристик и свойств жидкости и способ его применения
Предохранительное устройство для гашения коротких импульсов гидравлического удара и пульсаций давления
Способ возбуждения электромагнитных волн
Способ обнаружения шумящих объектов гидроакустической пассивной системой мониторинга
Система связи сверхнизкочастотного и крайненизкочастотного диапазонов с глубокопогруженными и удаленными объектами
Способ определения механических характеристик материалов при криогенных температурах
Подводный помехопостановщик

