Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ПРЕОДОЛЕНИЯ ОБЛЕДЕНЕЛОГО МОСТА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к системам и способам для автоматического обнаружения и безопасного преодоления обледенелого моста.
УРОВЕНЬ ТЕХНИКИ
[0002] Чрезвычайно опасные дорожные условия могут возникать, когда снег, лед и вода скапливаются на мостах и эстакадах. Мосты и эстакады в особенности подвержены этим условиям, поскольку в отличие от обычных поверхностей дороги они открыты для температур замерзания и ветров над поверхностью дороги, под поверхностью дороги и с обеих сторон. Кроме того, мосты часто строятся над водоемами, которые остывают быстрее, чем твердая почва. Наконец, в отличие от дорог мосты обычно строятся из стали и бетона, которые очень хорошо проводят тепло. Любое тепло, которое мост захватывает, быстро переносится к его поверхности, где оно отдается в окружающий воздух.
[0003] Эти факторы в объединении создают очень опасные ситуации для транспортных средств, перемещающихся с нормальной скоростью на дороге во время холодной погоды. Холодные температуры приводят к тому, что мосты и эстакады остывают и скапливают снег и лед быстрее, чем другие поверхности дороги, что влечет резкие и неожиданные переходы между обычными поверхностями дороги и опасным ледяным ландшафтом.
[0004] Например, для мостов и эстакад не является необычным быть полностью покрытыми слоем гладкого снега и льда, даже несмотря на то, что примыкающие поверхности дороги чистые или лишь немного влажные. Это происходит потому, что почва под дорогами помогает захватывать тепло и препятствовать обледенению дорог, если температура не опустится на несколько градусов ниже температуры замерзания. Успешный переход транспортного средства с чистой дороги на и через обледенелый мост требует раннего обнаружения и незамедлительной реакции, даже до того как транспортное средство в действительности встретится с мостом. Скорость движения должна быть существенно уменьшена, и методы вождения должны быть изменены, чтобы принять в расчет условия скользкости. Отказ сделать какую-либо из этих поправок надлежащим образом может в результате привести к катастрофе.
[0005] Ввиду вышеупомянутого необходимы системы и способы, чтобы идентифицировать потенциально обледенелые мосты и эстакады в пределах географической зоны транспортного средства. В идеале такие системы и способы будут автоматически обнаруживать скапливание льда или снега на мосту, когда транспортное средство приближается, и автоматически регулировать скорость ведения транспортного средства при необходимости, чтобы предотвратить скольжение или занос.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту предложен способ, содержащий этапы, на которых:
автоматически идентифицируют посредством транспортного средства предстоящее приближение транспортного средства к мосту;
обнаруживают в транспортном средстве по меньшей мере одно условие, указывающее скапливание льда на мосту;
вычисляют скорость транспортного средства, необходимую, чтобы предотвратить продольное скольжение между транспортным средством и мостом; и
автоматически замедляют транспортное средство с замедлением, достаточным, чтобы обеспечить возможность транспортному средству достичь вычисленной скорости к моменту, когда оно достигнет моста.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором используют глобальную систему позиционирования для определения проходимого маршрута транспортного средства и местоположение транспортного средства на проходимом маршруте.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором определяют, с использованием данных карты, местоположение моста на проходимом маршруте.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором определяют расстояние до моста путем сравнения местоположения транспортного средства с местоположением моста на проходимом маршруте.
Способ может дополнительно содержать этап, на котором автоматически получают посредством транспортного средства по меньшей мере одну из текущей и хронологической метеорологической сводки для географической зоны, в которой расположен мост.
Опционально, обнаружение содержит этап, на котором обнаружение осуществляют с использованием по меньшей мере одного датчика, выбранного из группы, состоящей из оптического датчика, радарного датчика, лидарного датчика и датчика навигационной системы.
Опционально, обнаружение по меньшей мере одного условия, указывающего скапливание льда на мосту, дополнительно содержит этап, на котором вычисляют, с использованием данных от по меньшей мере одного датчика, показатель уверенности, указывающий вероятность того, что лед скопился на мосту.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором вычисляют текущее продольное скольжение транспортного средства.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором предотвращают, насколько это возможно, становление текущего продольного скольжения отрицательным.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором принимают в расчет уклон поверхности дороги между транспортным средством и мостом.
Согласно второму аспекту предложена система для преодоления места скапливания льда на предстоящем мосту, причем система содержит:
по меньшей мере один процессор, размещенный на транспортном средстве; и
по меньшей мере одно устройство памяти, функционально связанное с по меньшей мере одним процессором и хранящее инструкции для исполнения в по меньшей мере одном процессоре, причем инструкции предписывают по меньшей мере одному процессору:
автоматически идентифицировать предстоящее приближение транспортного средства к мосту;
обнаруживать по меньшей мере одно условие, указывающее скапливание льда на мосту;
вычислять скорость транспортного средства, необходимую, чтобы предотвратить продольное скольжение между транспортным средством и мостом; и
автоматически замедлять транспортное средство с замедлением, достаточным, чтобы обеспечить возможность транспортному средству достичь вычисленной скорости к моменту, когда оно достигнет моста.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором используют глобальную систему позиционирования, чтобы определять проходимый маршрут транспортного средства и местоположение транспортного средства на проходимом маршруте.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором определяют, с использованием данных карты, местоположение моста на проходимом маршруте.
Опционально, идентификация предстоящего приближения дополнительно содержит этап, на котором определяют расстояние до моста путем сравнения местоположения транспортного средства с местоположением моста на проходимом маршруте.
Опционально, инструкции дополнительно предписывают по меньшей мере одному процессору автоматически получать по меньшей мере одну из текущей и хронологической метеорологической сводки для географической зоны, в которой расположен мост.
Опционально, обнаружение содержит этап, на котором осуществляют обнаружение с использованием по меньшей мере одного датчика, выбранного из группы, состоящей из оптического датчика, радарного датчика, лидарного датчика и датчика навигационной системы.
Опционально, обнаружение по меньшей мере одного условия, указывающего скапливание льда на мосту, дополнительно содержит этап, на котором вычисляют, с использованием данных от по меньшей мере одного датчика, показатель уверенности, указывающий вероятность того, что лед скопился на мосту.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором вычисляют текущее продольное скольжение транспортного средства.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором предотвращают, насколько это возможно, становление текущего продольного скольжения отрицательным.
Опционально, предотвращение продольного скольжения между транспортным средством и мостом содержит этап, на котором принимают в расчет уклон поверхности дороги между транспортным средством и мостом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Для того чтобы преимущества изобретения были легко поняты, более конкретное описание изобретения, кратко описанного выше, будет предоставлено с учетом конкретных вариантов осуществления, иллюстрируемых на приложенных чертежах. Принимая во внимание, что эти чертежи изображают только типовые варианты осуществления изобретения и, таким образом, не должны рассматриваться как ограничивающие его объем, изобретение будет описано и объяснено с дополнительной конкретикой и подробностями посредством использования сопроводительных чертежей, на которых:
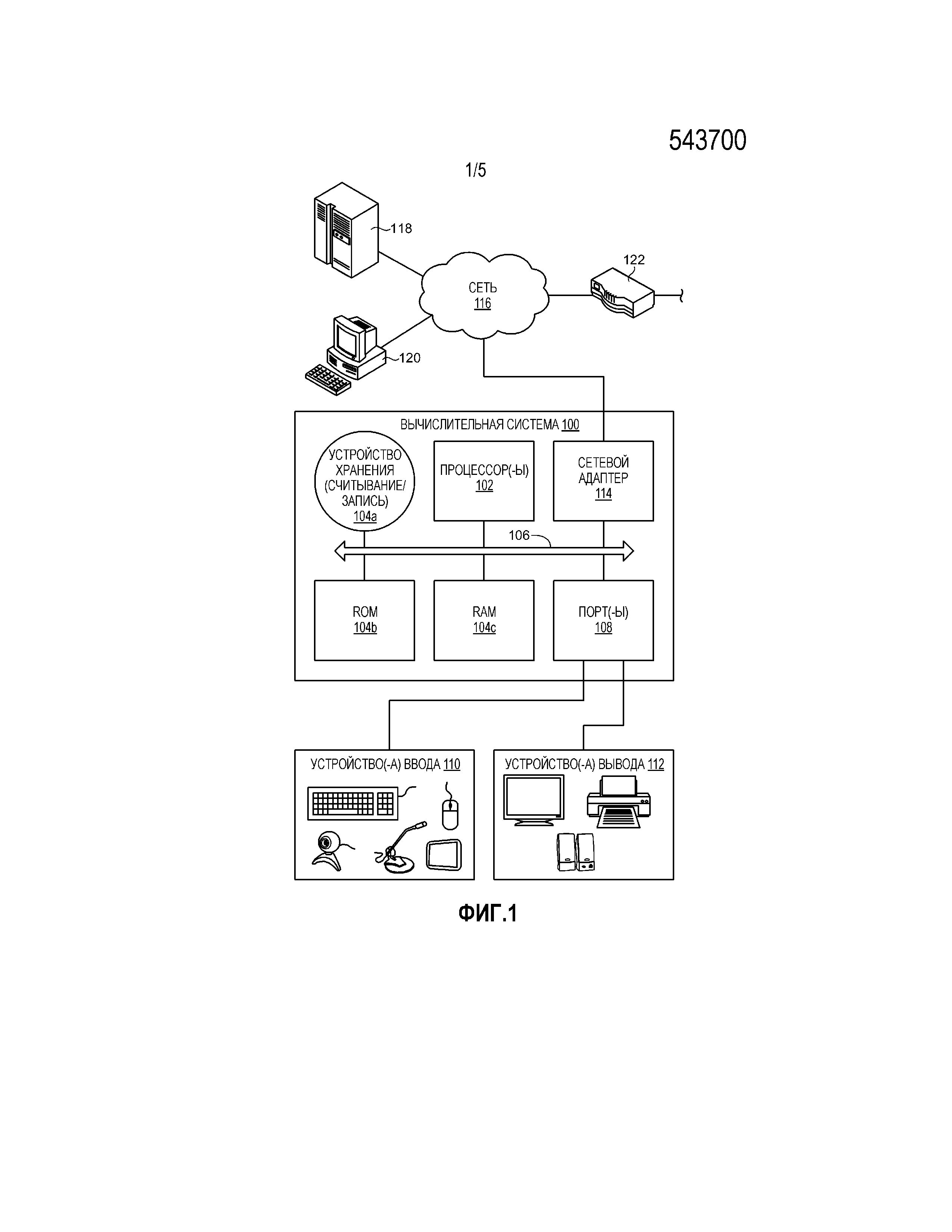
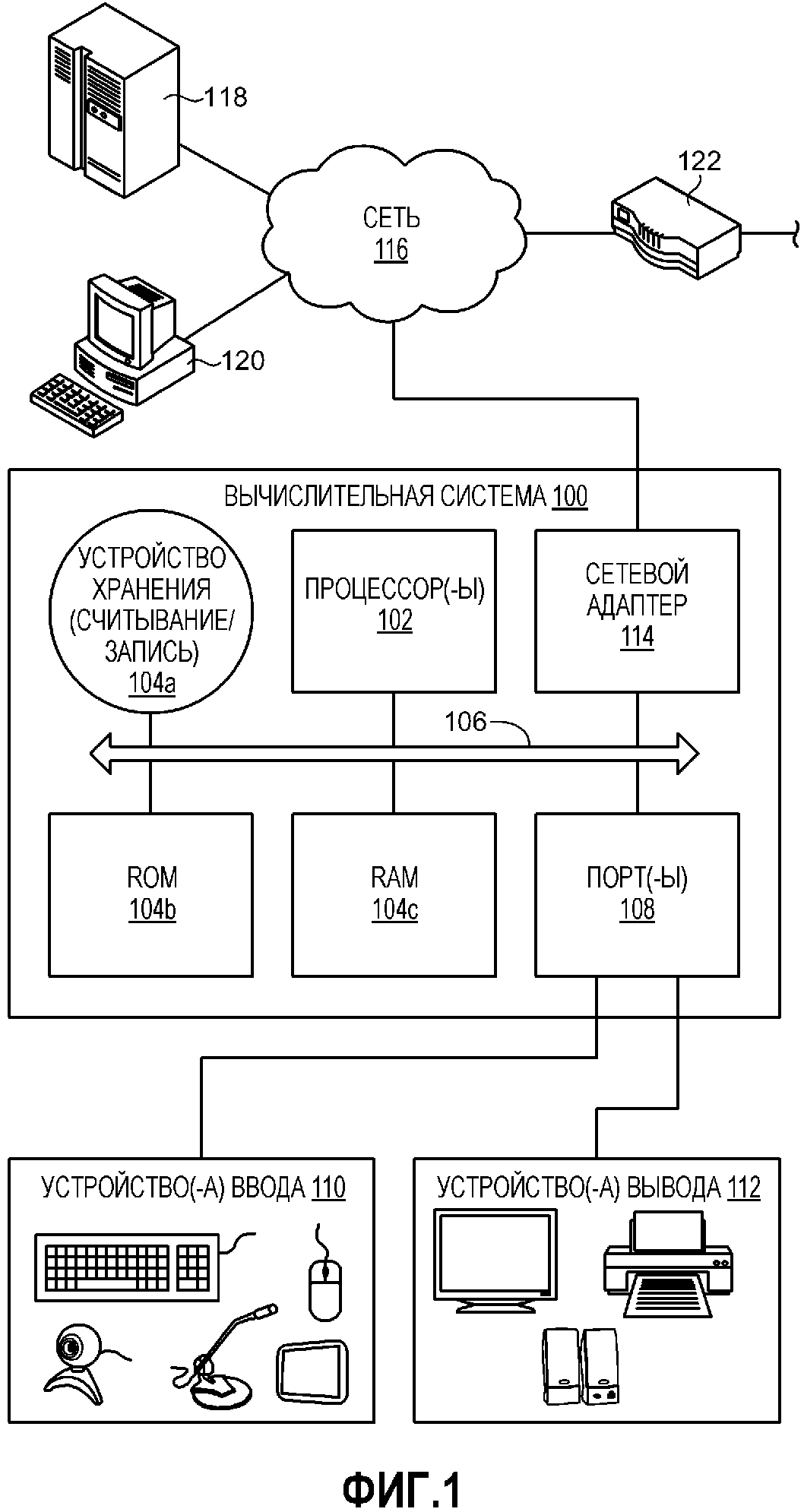
[0007] фиг.1 изображает высокоуровневую структурную схему, показывающую один пример вычислительной системы, в которой система и способ в соответствии с изобретением могут осуществляться;
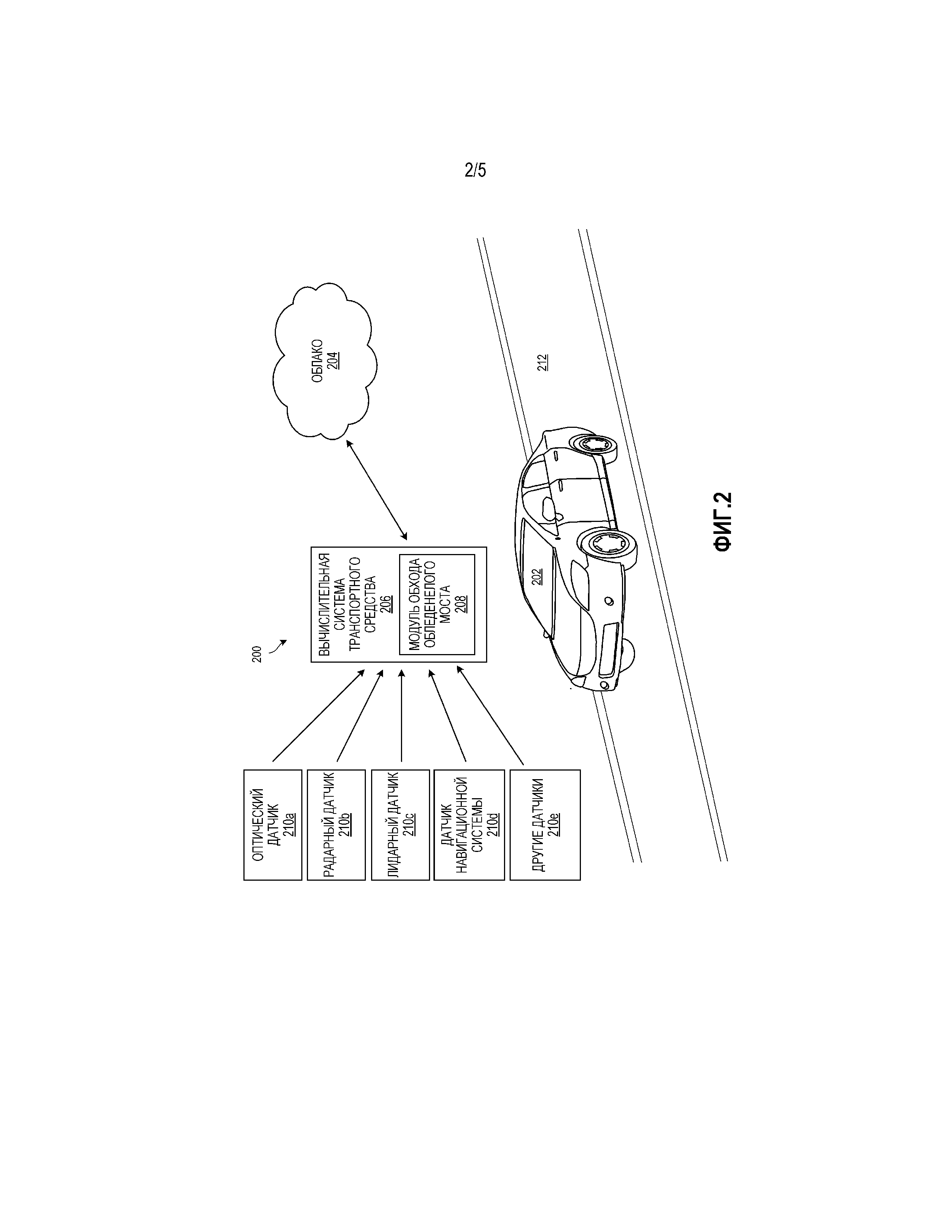
[0008] фиг.2 изображает вид в перспективе одного варианта осуществления транспортного средства, задействующего установленные на транспортном средстве датчики, чтобы обнаруживать и безопасно обходить обледенелый мост, в соответствии с изобретением;
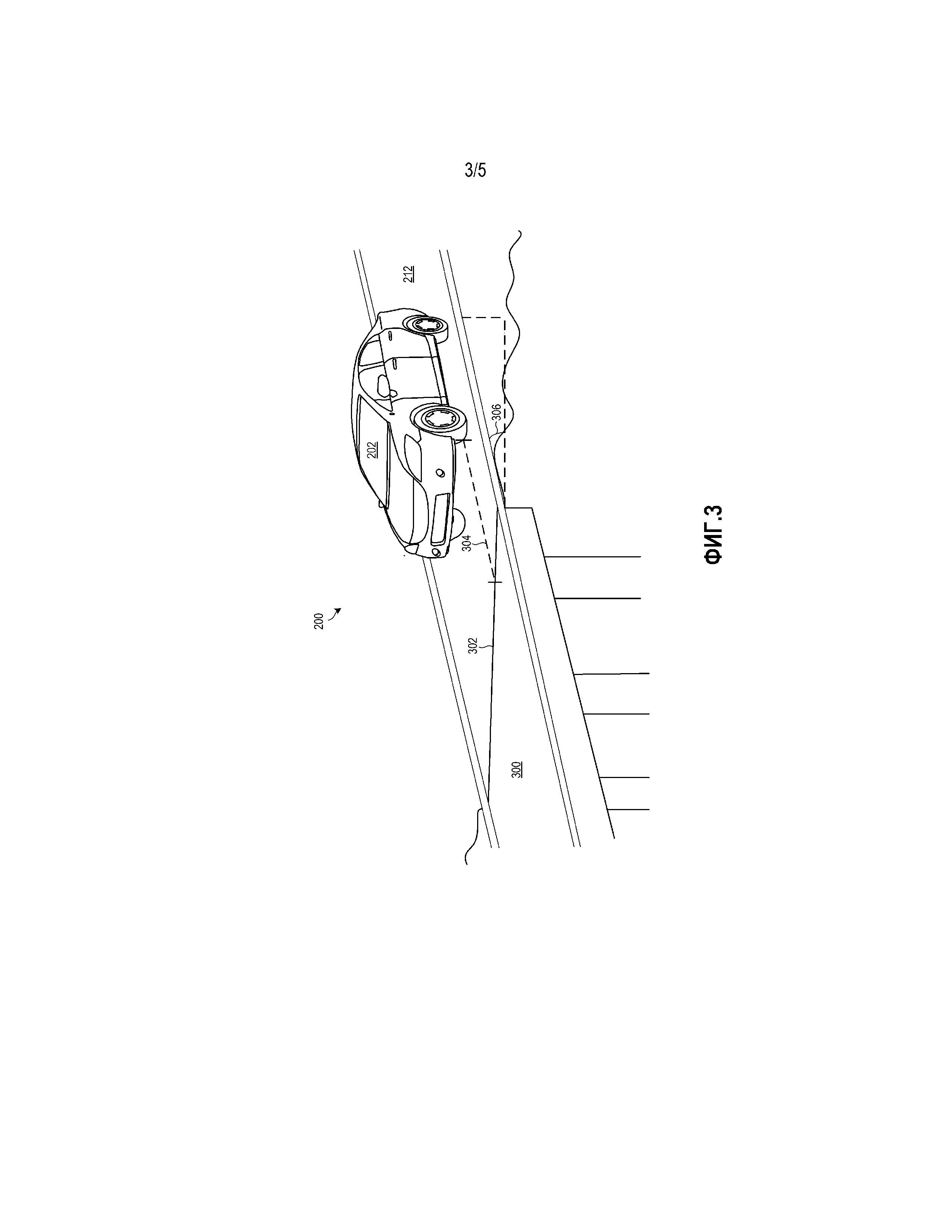
[0009] фиг.3 изображает вид в перспективе транспортного средства, приближающегося к обледенелому мосту, в соответствии с конкретными вариантами осуществления изобретения;
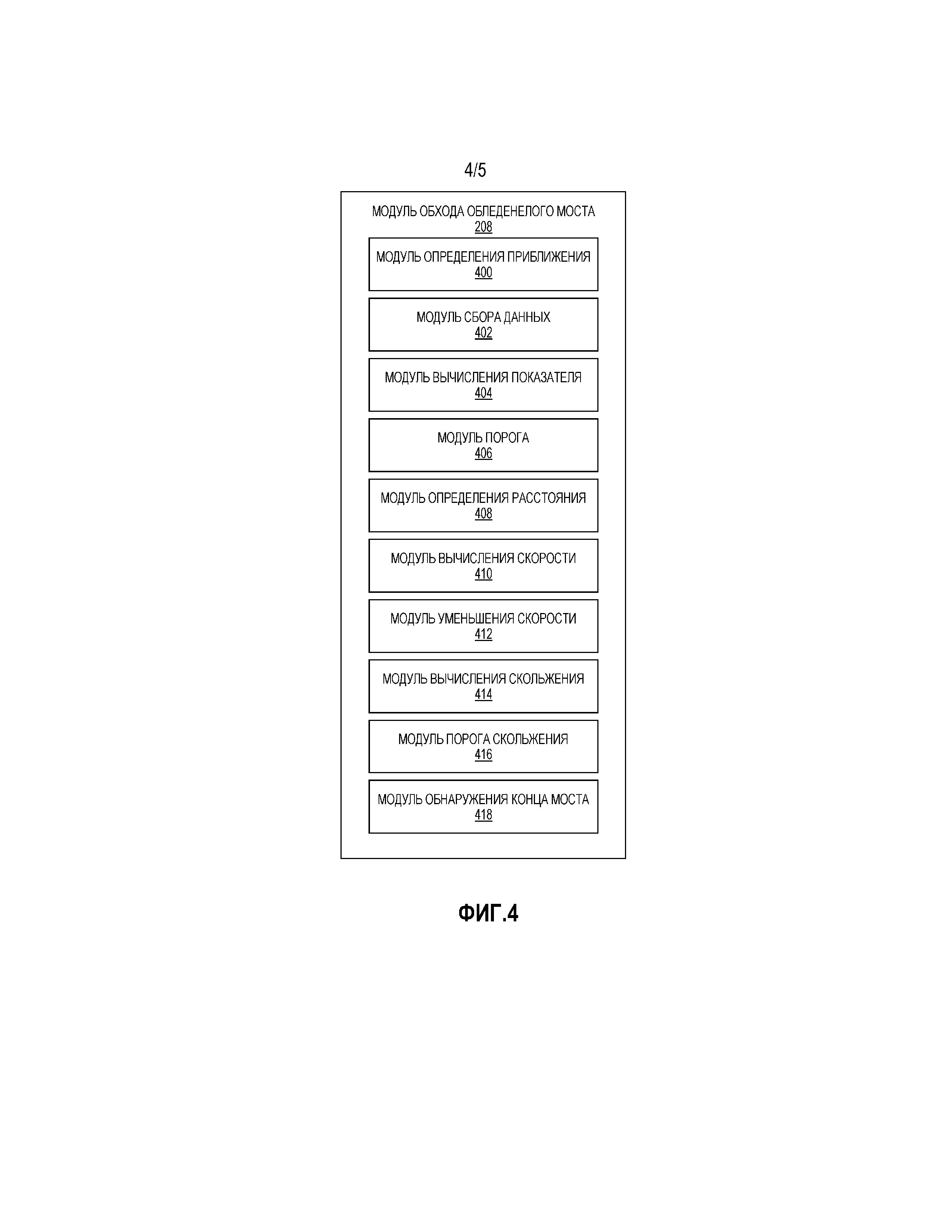
[0010] фиг.4 изображает модули для обеспечения различных признаков и функций системы в соответствии с конкретными вариантами осуществления изобретения; и
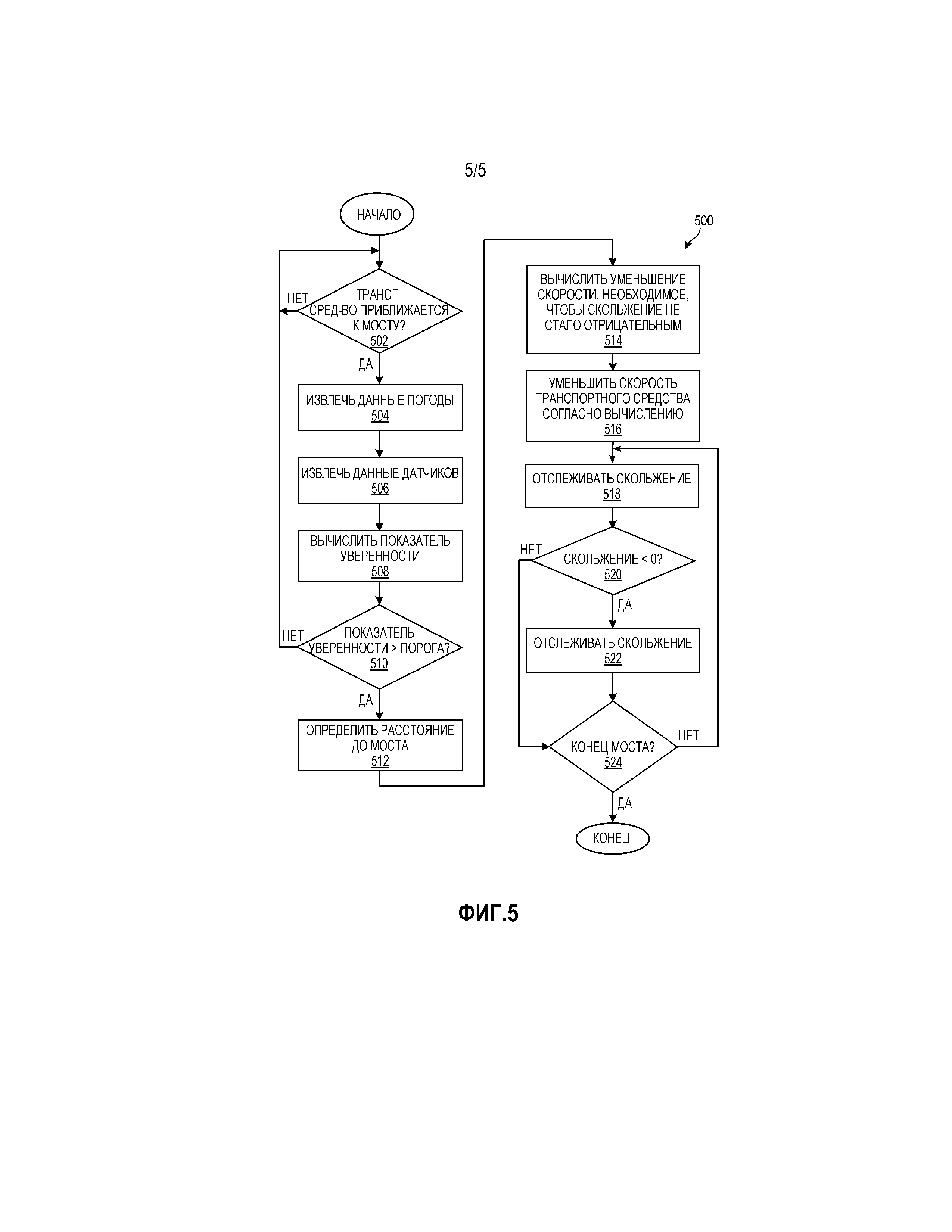
[0011] фиг.5 изображает блок-схему последовательности операций, показывающую процесс для обнаружения и безопасного преодоления места скапливания льда на предстоящем мосту в соответствии с конкретными вариантами осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0012] Со ссылкой на фиг.1 иллюстрируется один пример вычислительной системы 100. Вычислительная система 100 представляется, чтобы показать один пример среды, где система и способ в соответствии с изобретением могут осуществляться. Вычислительная система 100 может осуществляться как мобильное устройство 100, такое как интеллектуальный телефон или планшет, настольный компьютер, рабочая станция, сервер или подобное. Вычислительная система 100 представляется в качестве примера и не подразумевается как ограничивающая. Действительно, системы и способы, раскрываемые в настоящем документе, могут применяться к широкому множеству различных вычислительных систем дополнительно к показанный вычислительной системе 100. Системы и способы, раскрываемые в настоящем документе, могут также потенциально быть распределены по множеству вычислительных систем 100.
[0013] Как показано, вычислительная система 100 включает в себя по меньшей мере один процессор 102 и может включать в себя более одного процессора 102. Процессор 102 может быть функционально соединен с памятью 104. Память 104 может включать в себя одно или более энергонезависимых устройств хранения, таких как жесткие диски 104a, твердотельные накопители 104a, CD-ROM-накопители 104a, DVD-ROM-накопители 104a, ленточные накопители 104a или подобное. Память 104 может также включать в себя энергонезависимую память, такую как постоянная память 104b (например, ROM, EPROM, EEPROM и/или флэш-ROM), или энергозависимую память, такую как оперативная память 104c (RAM или операционная память). Шина 106 или множество шин 106 могут взаимно соединять процессор 102, устройства 104 памяти и другие устройства, чтобы обеспечить возможность данным и/или инструкциям перемещаться между ними.
[0014] Чтобы обеспечить возможность связи с внешними системами или устройствами, вычислительная система 100 может включать в себя один или более портов 108. Такие порты 108 могут осуществляться в качестве проводных портов 108 (например, USB-портов, последовательных портов, портов Firewire, SCSI-портов, параллельных портов и т. д.) или беспроводных портов 108 (например, Bluetooth, IrDA и т. д.). Порты 108 могут обеспечивать возможность связи с одним или более устройствами ввода 110 (например, клавиатурами, мышью, сенсорными экранами, камерами, микрофонами, сканерами, устройствами хранения и т. д.) и устройствами вывода 112 (например, дисплеями, мониторами, динамиками, принтерами, устройствами хранения и т. д.). Порты 108 могут также обеспечивать возможность связи с другими вычислительными системами 100.
[0015] В конкретных вариантах осуществления вычислительная система 100 включает в себя проводной или беспроводная сетевой адаптер 114, чтобы соединять вычислительную систему 100 с сетью 116, такой как LAN, WAN или Интернет. Такая сеть 116 может обеспечивать возможность вычислительной системе 100 соединяться с одним или более серверами 118, рабочими станциями 120, персональными компьютерами 120, мобильными вычислительными устройствами или другими устройствами. Сеть 116 может также обеспечивать возможность вычислительной системе 100 подключаться к другой сети посредством маршрутизатора 122 или другого устройства 122. Такой маршрутизатор 122 может обеспечивать возможность вычислительной системе 100 осуществлять связь с серверами, рабочими станциями, персональными компьютерами или другими устройствами, находящимися в различных сетях.
[0016] Как упомянуто выше, некоторые из наиболее опасных типов условий вождения происходят, когда снег и лед скапливаются на мостах и эстакадах. Транспортные средства, перемещающиеся по маршруту от поверхности проезжей части на почве на мост в особенности уязвимы к авариям, поскольку часто отсутствует указание или предупреждение об опасности до перехода от дороги к мосту. Чтобы избежать этого типа катастрофы, транспортные средства в соответствии с вариантами осуществления настоящего изобретения могут быть сконфигурированы, чтобы предвидеть обледенелые мосты и предпринять предупредительные меры, чтобы избежать скольжения или проскальзывания при встрече с таким переходом.
[0017] Со ссылкой на фиг.2, в конкретных вариантах осуществления система 200 в соответствии с изобретением может включать в себя транспортное средство 202 в процессе перемещения по поверхности 212 проезжей части. Транспортное средство 202 может включать в себя пассажирское транспортное средство, автономное транспортное средство, большегрузное промышленное или транспортирующее транспортное средство, автобус или подобное. Транспортное средство 202 может быть оборудовано различными бортовыми датчиками 210a-e, сконфигурированными, чтобы обнаруживать внешнюю среду. Эти датчики 210a-e могут включать в себя, например, оптические или видеокамерные датчики 210a, радарные датчики 210b, лидарные датчики 210c и датчики 210d навигационной системы. Другие датчики 210e могут включать в себя, например, датчики температуры, датчики влажности, датчики оборотов колес, датчики вращения оси, датчики давления, датчики трения и т. п. В некоторых вариантах осуществления, как рассмотрено более подробно ниже, конкретные датчики 210a-e могут осуществлять связь с сервером облака 204 или другими внешними источниками данных, чтобы получать данные карты или другую актуальную информацию.
[0018] Как рассмотрено более подробно ниже, эти датчики 210a-e могут работать вместе, чтобы обнаруживать условия окружающей среды, чтобы определять, приближается ли транспортное средство 202 к опасному скапливанию льда или снега на предстоящем мосту. Транспортное средство 202 в соответствии с вариантами осуществления изобретения может также включать в себя внутреннюю вычислительную систему 206 транспортного средства, чтобы анализировать и применять сенсорные данные, собранные от датчиков 210a-e, чтобы сделать это определение и определить надлежащий курс действия.
[0019] В конкретных вариантах осуществления вычислительная система 206 транспортного средства может включать в себя модуль 208 обхода обледенелого моста. С использованием данных от датчиков 210a-e модуль 208 обхода обледенелого моста может быть сконфигурирован, чтобы обнаруживать опасные условия дороги ввиду скапливания льда или снега на предстоящем мосту и предпринимать надлежащие действия, чтобы предотвратить скольжение транспортного средства 202.
[0020] В частности, модуль 208 обхода обледенелого моста может быть сконфигурирован, чтобы собирать данные, исходящие от каждого из датчиков 210a-e, и выполнять один или более алгоритмов слияния с использованием данных от датчиков 210a-e в качестве входных данных. Алгоритмы слияния могут генерировать показатель уверенности, указывающий как существование предстоящего моста, так и вероятность, что лед или снег скопились на нем. Как рассмотрено более подробно ниже, показатель уверенности может инициировать выполнение последующих вычислений, касающихся скорости и продольного скольжения транспортного средства 202, и может дополнительно инициировать ассоциированное уменьшение в скорости транспортного средства 202, чтобы избежать скольжения. Таким образом, варианты осуществления настоящего изобретения могут обеспечивать успешную навигацию транспортного средства 202 по обледенелому мосту.
[0021] В некоторых вариантах осуществления датчики 210a-e транспортного средства 202 могут быть сконфигурированы, чтобы собирать внешние данные, указывающие как присутствие предстоящего моста, так и вероятное образование льда на мосту или эстакаде. Например, в конкретных вариантах осуществления оптические датчики 210a могут включать в себя устройства получения изображений, такие как камеры, устройства с зарядовой связью или подобное, чтобы получать неподвижные изображения или видео окружающей зоны. Оптические датчики 210a могут осуществлять связь с вычислительной системой 206 транспортного средства, чтобы выполнять обработку над полученными изображениями, увеличить контрастность или четкость, например. Данные от оптических датчиков 210a могут быть собраны, обработаны и проанализированы вычислительной системой 206 транспортного средства, чтобы указать или подтвердить присутствие предстоящего моста и/или скапливания снега или льда на мосту.
[0022] Радарные датчики 210b, объединенные с транспортным средством 202, могут использовать электромагнитные волны, чтобы определять расстояние между транспортным средством 202 и мостом или эстакадой или между сухой поверхностью 212 проезжей части и скапливанием снега или льда на поверхности 212 проезжей части. Радарные датчики 210b могут также быть использованы, чтобы определять свойства моста или условия на мосту.
[0023] Например, данные, собранные от радарных датчиков 210b, могут быть использованы, чтобы отличать различные типы мостов, такие как балочные мосты, мосты со сквозными фермами, арочные мосты, консольные мосты, вантовые мосты, подвесные мосты и магистральные эстакады. Поскольку различные типы мостов представляют различные навигационные сложности ввиду различий в уклоне, строительных материалах и характерных признаках, эти данные могут быть полезны в определении надлежащей реакции для успешного преодоления моста при опасных условиях ввиду снега и льда. Данные, собранные от радарных датчиков 210b, могут также быть использованы, чтобы идентифицировать тип поверхности 212 проезжей части или чтобы обнаружить изменение в поверхности 212 проезжей части, которое можно ожидать при переходе от дороги на земле к мосту или от сухой поверхности 212 проезжей части к влажной или ледяной поверхности 212 проезжей части. Как рассмотрено выше, эти данные могут быть переданы вычислительной системе 206 транспортного средства и использованы, чтобы обнаружить скапливание снега или льда на мосту и обеспечить надлежащую реакцию транспортного средства 202.
[0024] Лидарные датчики 210c (датчики светового обнаружения и определения дальности), объединенные с транспортным средством 202, могут быть использованы, чтобы собирать данные путем сканирования окружающей среды, включающей в себя поверхность 212 проезжей части, посредством лазерного излучения. Таким образом, лидарные датчики 210c могут определять точное местоположение моста, а также относящиеся к нему признаки и характеристики, включающие в себя его уклон или скат по отношению к поверхности 212 проезжей части. Лидарные датчики 210c могут также обнаруживать другие транспортные средства и средовые объекты и условия, такие как скопления транспорта или аварии. Эти данные могут также приниматься вычислительной системой 206 транспортного средства и вводиться в алгоритмы слияния, чтобы определять надлежащую реакцию транспортного средства 202.
[0025] Датчики 210d навигационной системы могут быть использованы, чтобы обнаружить местоположение транспортного средства 202. Это местоположение может быть использовано, чтобы извлечь данные карты для зон, в которых транспортное средство 202 расположено. Данные карты могут быть сохранены транспортным средством 202 или извлечены из внешнего источника, такого как сервер облака 204. Эти данные карты могут включать в себя местоположения близких мостов так, чтобы вычислительная система 206 транспортного средства могла определять, приближается ли мост. В некоторых вариантах осуществления данные карты могут включать в себя информацию о ландшафте или поверхности 212 проезжей части, преодолеваемых транспортным средством 202, такую как уклон или скат преодолеваемой дороги, ширина дороги или предстоящего моста, подъем дороги или предстоящего моста, тип преодолеваемого моста, изгибы дороги и рекомендуемые скорости, ассоциированные с изгибами, или подобное.
[0026] Путем сравнения местоположения транспортного средства 202 с местоположением моста, а также идентификации маршрута, проходимого транспортным средством 202 до моста, расстояние до моста может быть определено. Датчики навигационной системы 210d могут включать в себя обычные датчики глобальной системы позиционирования ("GPS") или другие подобные датчики, известные в данной области техники. В конкретных вариантах осуществления знание о местоположении транспортного средства 202 может также быть полезным, чтобы извлечь другие типы данных, такие как текущие или прошлые данные погоды, текущие условия дороги, данные пробок, данные аварий и опасностей на дороге и т. п., для зон, преодолеваемых транспортным средством 202.
[0027] Теперь со ссылкой на фиг.3, при приближении моста 300 различные факторы могут учитываться при определении желаемой скорости транспортного средства 202, когда оно проходит по мосту 300. Например, расстояние 304 между транспортным средством 202 и мостом 300 может диктовать, как быстро транспортное средство 202 должно замедляться, чтобы достичь желаемой скорости к моменту, когда оно достигнет моста 300. Уклон 306 ската, ведущего к мосту 300, может диктовать, как быстро транспортное средство 202 может замедляться без того, чтобы транспортное средство 202 скользило или проскальзывало относительно поверхности 212 проезжей части. Таким образом, расстояние 304 и уклон 306 могут быть использованы вычислительной системой 206 транспортного средства, чтобы определить наиболее безопасный способ уменьшить скорость транспортного средства 202 до желаемой скорости к моменту, когда транспортное средство 202 достигнет моста 300.
[0028] При операции в одном варианте осуществления данные, собранные от различных бортовых датчиков 210a-e транспортного средства 202, могут подвергаться обработке в вычислительной системе 206 транспортного средства, чтобы указывать предстоящий мост 300. Датчики 210d навигационной системы, ассоциированные с транспортным средством 202, могут идентифицировать местоположение транспортного средства 202, которое затем может быть использовано, чтобы извлечь ассоциированные текущие или хронологические данные погоды и/или дорожные условия. Радарные датчики 210b и лидарные датчики 210c могут собирать данные, указывающие присутствующее скапливание снега или льда на мосту 300, что может быть подтверждено оптическими данными от оптических датчиков 210a. Другие датчики 210e, такие как датчики температуры и влажности, могут собирать текущие средовые данные, указывающие условия, благоприятные для формирования льда на поверхностях 212 проезжей части. Данные от датчиков 210a-e могут приниматься вычислительной системой 206 транспортного средства и вводиться в алгоритмы слияния, чтобы генерировать показатель уверенности существования обледенелого моста 300.
[0029] Показатель уверенности, генерируемый вычислительной системой 206 транспортного средства, может сравниваться с предварительно определенным пороговым значением, выше которого присутствие скапливания льда или снега на мосту 300 является по существу неизбежным. Если показатель уверенности больше предварительно определенного порогового значения, вычислительная система 206 транспортного средства может уменьшать скорость транспортного средства 202 и регулировать другие параметры ведения при необходимости обеспечить безопасную навигацию транспортного средства 202 по мосту 300 и предотвратить скольжение.
[0030] Как упомянуто выше, вычислительная система 206 транспортного средства может задействовать данные от бортовых датчиков 210a-e, чтобы определять расстояние 304 между транспортным средством 202 и переходом 302 на мост 300. В некоторых вариантах осуществления уклон 306 поверхности 212 проезжей части по отношению к мосту 300 может также быть вычислен. Вычислительная система 206 транспортного средства может задействовать эти данные, чтобы определить наибольшую скорость, с которой транспортное средство 202 может успешно преодолеть переход 302 и осуществить навигацию на мосту 300. Вычислительная система 206 транспортного средства может затем уменьшать скорость транспортного средства 202 с замедлением, достаточным, чтобы обеспечить возможность транспортному средству 202 достичь вычисленной скорости к моменту, когда оно достигнет моста 300.
[0031] Теперь со ссылкой на фиг.4, система в соответствии с изобретением может включать в себя различные модули, чтобы обеспечивать различные признаки и функции. Функциональные возможности этих модулей могут осуществляться в одном или более из вычислительной системы 206 транспортного средства, облачного сервера 204 или других внешних источников данных. Модули могут включать в себя один или более из модуля 208 обхода обледенелого моста, модуля 400 определения приближения, модуля 402 сбора данных, модуля 404 вычисления показателя, модуля 406 порога, модуля 408 определения расстояния, модуля 410 вычисления скорости, модуля 412 уменьшения скорости, модуля 414 вычисления скольжения, модуля 416 порога скольжения и модуля 418 обнаружения конца моста. Эти модули могут осуществляться в аппаратных средствах, программных средствах, программно-аппаратных средствах или их комбинациях. Модули представляются в качестве примера и не предназначены, чтобы представлять исчерпывающий список модулей, которые могут включаться в систему. Система может включать в себя больше или меньше модулей, чем иллюстрируется, или функциональные возможности модулей могут быть организованы иным образом.
[0032] В общем случае модуль обхода обледенелого моста 208 принимает данные от бортовых датчиков 210a-e транспортного средства 202, которые могут быть использованы, чтобы определить предстоящее приближение транспортного средства 202 к мосту 300 и чтобы вызвать курс действия для обеспечения успешного обхода моста 300 транспортным средством 202. Модуль 208 обхода обледенелого моста может включать в себя один или более подмодулей, чтобы выполнять конкретные определенные задачи в этом отношении, как изложено подробно ниже.
[0033] Модуль 400 определения приближения может определять, приближается ли транспортное средство 202 к мосту 300 или эстакаде. Как рассмотрено выше, данные могут быть собраны от различных бортовых датчиков 210a-e и введены в модуль 400 определения приближения, чтобы сделать эту оценку. Например, датчики 210d навигационной системы могут собирать данные карты, показывающие один или более мостов 300, находящихся в пределах той же самой географической зоны, что и транспортное средство 202. Радарные датчики 210b и лидарные датчики 210c могут собирать данные, указывающие предстоящий переход 302 от поверхности 212 проезжей части на почве к мосту 300, в то время как оптические датчики 210a могут обеспечивать данные изображения, подтверждающие переход 302.
[0034] Модуль 402 сбора данных может собирать дополнительные данные от бортовых датчиков 210a-e, указывающие скапливание снега или льда на мосту 300. Например, оптические датчики 210a могут производить данные изображения, показывающие отражающую, блестящую или непрозрачную белую поверхность, которая в некоторых вариантах осуществления может быть сделана более видимой путем контрастной обработки, выполняемой вычислительной системой 206 транспортного средства. Радарные датчики 210b и лидарные датчики 210c могут также собирать данные, указывающие скапливание льда или снега на мосту 300. Датчики 210d навигационной системы могут собирать информацию местоположения для транспортного средства 202, которая может быть использована, чтобы извлечь текущие и/или исторические данные погоды или температуры для моста 300, указывающие вероятность скапливания снега или льда на нем.
[0035] Комбинированные данные от модуля 402 сбора данных могут быть введены в модуль 404 вычисления показателя, чтобы произвести показатель уверенности, отражающий вероятность скапливания снега или льда на мосту 300. Модуль 406 порога может затем сравнивать показатель уверенности с предварительно определенным пороговым значением или показателем, выше которого существование обледенелого моста 300 по существу неизбежно. Если показатель уверенности равен или больше порогового значения, вычислительная система 206 транспортного средства может уменьшать скорость транспортного средства 202 и/или регулировать параметры ведения, чтобы предотвратить катастрофу, как подробнее описано ниже.
[0036] При возвращении показателя уверенности, превосходящего предварительно определенное пороговое значение, модуль 408 определения расстояния может определять текущее расстояние 304 между транспортным средством 202 и переходом 302 на мост 300. Модуль 410 вычисления скорости может затем вычислять безопасную скорость, на которой транспортное средство 202 может преодолевать мост 300 при текущих условиях. Как расстояние 304, определенное модулем 408 определения расстояния, так и скорость, вычисленная модулем 410 вычисления скорости, могут быть использованы модулем 412 уменьшения скорости, чтобы определять замедление, с которым скорость транспортного средства 202 может уменьшаться. Замедление может быть вычислено, чтобы обеспечить возможность транспортному средству 202 достичь вычисленной скорости к моменту, когда оно достигнет перехода 302 на мост 300.
[0037] Модуль 412 уменьшения скорости может применять это замедление, чтобы замедлить транспортное средство 202 до вычисленной скорости к моменту, когда транспортное средство 202 достигнет моста 300. В одном варианте осуществления модуль 412 уменьшения скорости может приводить транспортное средство 202 к полной остановке в ответ на чрезвычайные условия, как указано данными от датчиков 210a-e, где существует очень низкая вероятность того, что мост 300 может быть безопасно преодолен.
[0038] В некоторых вариантах осуществления продольное скольжение транспортного средства 202, когда оно преодолевает мост 300, может обеспечивать хорошую меру уровня безопасности, ассоциированного с этим. Эта информация может быть полезна, чтобы обеспечить возможность внесения поправок в скорость транспортного средства 202 и другие параметры ведения, чтобы скорректировать любое скольжение. Для этих целей модуль 414 вычисления скольжения может вычислять продольное скольжение транспортного средства 202 в виде процентного соотношения разницы между скоростью транспортного средства 202 относительно поверхности дороги и скоростью колеса между осью и поверхностью 212 проезжей части, то есть: скольжение=(ωr-v)/v, где ω является горизонтальным компонентом скорости вращения колеса, r является радиусом колеса в точке соприкосновения, и v является скоростью транспортного средства. Положительное скольжение указывает, что колеса крутятся; отрицательное скольжение указывает, что они проскальзывают. В идеале, когда отсутствует скольжение или проскальзывание, ωr=v.
[0039] В некоторых вариантах осуществления модуль 414 вычисления скольжения может продолжать вычислять продольное скольжение транспортного средства 202 через регулярные или произвольные пошаговые интервалы времени, чтобы обеспечить по существу непрерывное наблюдение транспортного средства 202, когда оно преодолевает мост 300, и чтобы обеспечить возможность корректирующих мер в случае скольжения.
[0040] Модуль 416 порога скольжения может принимать значение вычисления скольжения от модуля 414 вычисления скольжения и сравнивать его с предварительно определенным порогом. Как рассмотрено выше, предварительно определенное пороговое значение может быть установлено равным нулю ("0") так, что положительное значение вычисления скольжения указывает, что колеса крутятся, и отрицательное значение вычисления скольжения указывает, что колеса проскальзывают. Если модуль 416 порога скольжения определяет, что значение вычисления скольжения не равно предварительно определенному пороговому значению, модуль 412 уменьшения скорости может продолжать уменьшать скорость транспортного средства 202 так, что транспортное средство 202 может восстановить сцепление с поверхностью 212 проезжей части моста 300.
[0041] Модуль 418 обнаружения конца моста может принимать данные от бортовых датчиков 210a-e, чтобы определять, когда транспортное средство 202 закончило преодоление моста 300. Например, данные от датчиков 210d навигационной системы могут указывать, что транспортное средство 202 достигло местоположения, которое находится за мостом 300, в то время как радарные датчики 210b и лидарные датчики 210c могут обеспечивать данные, показывающие окружающую среду в соответствии с поверхностью 212 проезжей части на почве. Данные от оптических датчиков 210a могут обеспечивать данные изображения, подтверждающие конец моста 300. Когда транспортное средство 202 достигает конца моста 300, модуль 418 обнаружения конца моста может побуждать завершение операции модуля 208 обхода обледенелого моста.
[0042] Теперь со ссылкой на фиг.5 иллюстрируется один вариант осуществления способа 500 для помощи транспортному средству 202 в преодолении обледенелого моста 300. Как показано, способ 500 изначально определяет 502, приближается ли транспортное средство 202 к мосту 300. Это может быть выполнено путем определения местоположения транспортного средства 202 и сравнения местоположения с местоположением мостов 300 в данных карты, сохраненных в транспортном средстве 202 или обеспеченных от внешнего источника, такого как сервер облака 204. В качестве альтернативы, датчики 210a-e на транспортном средстве 202 могут обнаруживать, когда транспортное средство 202 приближается 502 к мосту 300.
[0043] При приближении к мосту 300 транспортное средство 202 может извлекать различные типы данных, чтобы определять, обледенел ли мост 300. Например, транспортное средство 202 может извлекать 504 данные погоды, такие как метеорологическая сводка, чтобы определять, являются ли условия такими, чтобы создать высокую вероятность того, что присутствует скапливание льда на мосту 300. В качестве альтернативы или дополнения, транспортное средство 202 может обнаруживать погодные условия с использованием 506 своих собственных датчиков 210a-e, таких как датчики температуры, датчики влажности, датчики ветра, датчики льда и/или подобное. Транспортное средство 202 может также обнаруживать условия льда на мосту 300 с использованием датчиков 210a-e транспортного средства 202, таких как оптические датчики 210a, радарные датчики 210b, лидарные датчики 210c и т. п.
[0044] С использованием данных, извлеченных на этапах 504, 506, транспортное средство 202 может вычислять 508 показатель уверенности. Этот показатель уверенности может представлять вероятность того, что лед скопился на мосту 300. В некоторых вариантах осуществления показатель уверенности может сравниваться 510 с предварительно определенным пороговым значением. Если показатель уверенности меньше порогового значения, способ 500 может возвращаться к отслеживанию 502, приближается ли транспортное средство 202 к мосту 300. Показатель уверенности больше порогового значения может обеспечивать существенное доказательство, что присутствует скапливание льда или снега на мосту 300, и способ 500 может продолжаться.
[0045] В ответ на то, что показатель уверенности больше предварительно определенного порогового значения, транспортное средство 202 может определять 512 расстояние до моста 300 с использованием ранее рассмотренных данных карты и/или с использованием датчиков 210a-e транспортного средства 202, таких как оптические датчики 210a, радарные датчики 210b, лидарные датчики 210c или подобное. В конкретных вариантах осуществления это расстояние является расстоянием до моста 300 на проходимом маршруте в отличие от расстояния по прямой линии. С использованием этого расстояния вычислительная система 206 транспортного средства может вычислять 514 уменьшение скорости, необходимое, чтобы уменьшать скорость транспортного средства 202 до безопасного уровня к моменту, когда оно достигнет моста 300. Это уменьшение скорости может быть вычислено для обеспечения того, что скольжение транспортного средства 202 не становится отрицательным. Другие факторы, такие как уклон или наклон поверхности 212 проезжей части, приближающейся к мосту 300, могут приниматься в расчет при вычислении безопасного уменьшения скорости. Вычислительная система 206 транспортного средства может затем уменьшать 516 скорость транспортного средства 202 согласно вычислениям, выполняемым на этапе 514. В идеале это обеспечит то, что транспортное средство 202 достигает безопасной скорости к моменту, когда оно подходит к мосту 300.
[0046] Во время пересечения моста 300 транспортное средство 202 может отслеживать 518 скольжение транспортного средства 202 и определять 520, стало ли скольжение отрицательным. Отрицательное скольжение будет указывать, что колеса проскальзывают. Если скольжение отрицательно, вычислительная система 206 транспортного средства может дополнительно уменьшать 522 скорость транспортного средства 202, пока скольжение не станет неотрицательным. Транспортное средство 202 может затем определять 524, был ли достигнут конец моста 300. Если нет, транспортное средство 202 может повторять этапы 518, 520, 522, пока конец моста 300 не будет достигнут. Когда конец моста 300 достигается, способ 500 заканчивается.
[0047] В вышеприведенном раскрытии ссылка была сделана на сопроводительные чертежи, которые формируют его часть и на которых показаны в качестве иллюстрации конкретные осуществления, в которых раскрытие может осуществляться на практике. Понимается, что другие осуществления могут задействоваться, и структурные изменения могут быть сделаны без выхода за пределы объема настоящего раскрытия. Ссылки в техническом описании на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т. д. указывают, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретный признак, структуру или характеристику. Кроме того, такие фразы не обязательно ссылаются на один и тот же вариант осуществления. Кроме того, когда конкретный признак, структура или характеристика описаны в связи с вариантом осуществления, утверждается, что в знания специалиста в данной области техники входит то, как оказывать воздействие на такой признак, структуру или характеристику в связи с другими вариантами осуществления, независимо от того, описано ли это явным образом.
[0048] Осуществления систем, устройств и способов, раскрываемых в настоящем документе, могут содержать или задействовать специализированный или универсальный компьютер, включающий в себя компьютерные аппаратные средства, такие как, например, один или более процессоров и системная память, как рассмотрено в настоящем документе. Осуществления в рамках объема настоящего раскрытия могут также включать в себя физические и другие машиночитаемые носители для переноса или хранения машиноисполняемых инструкций и/или структур данных. Такие машиночитаемые носители могут быть любыми доступными носителями, к которым может осуществляться доступ универсальной или специализированной компьютерной системой. Машиночитаемые носители, которые хранят машиноисполняемые инструкции, являются компьютерными носителями (устройствами) памяти. Машиночитаемые носители, которые переносят машиноисполняемые инструкции, являются носителями передачи. Таким образом, в качестве примера и не ограничения, осуществления раскрытия могут содержать по меньшей мере два однозначно различных вида машиночитаемых носителей: компьютерные носители (устройства) памяти и носители передачи.
[0049] Компьютерные носители (устройства) памяти включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители ("SSD") (например, на основе RAM), флэш-память, память на фазовых переходах ("PCM"), другие типы памяти, другой накопитель на оптических дисках, накопитель на магнитных дисках или другие магнитные устройства хранения или любой другой носитель, который может быть использован, чтобы хранить желаемые средства программного кода в форме машиноисполняемых инструкций или структур данных, и к которому может осуществляться доступ универсальным или специализированным компьютером.
[0050] Осуществление устройств, систем и способов, раскрываемых в настоящем документе, может осуществлять связь через компьютерную сеть. "Сеть" определена как одна или более линий передачи данных, которые обеспечивают возможность транспортировки электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация переносится или обеспечивается по сети или другому соединению связи (либо проводному, либо беспроводному, либо представляющему собой комбинацию проводного или беспроводного) к компьютеру, компьютер надлежащим образом рассматривает соединение как носитель передачи. Носители передачи могут включать в себя сеть и/или линии передачи данных, которые могут быть использованы, чтобы переносить желаемые средства программного кода в форме машиноисполняемых инструкций или структур данных и к которым может осуществляться доступ универсальным или специализированным компьютером. Комбинации вышеупомянутого должны также включаться в объем машиночитаемых носителей.
[0051] Машиноисполняемые инструкции содержат, например, инструкции и данные, которые, при исполнении в процессоре, побуждают универсальный компьютер, специализированный компьютер или специализированное обрабатывающее устройство выполнять конкретную функцию или группу функций. Машиноисполняемые инструкции могут быть, например, двоичными файлами, инструкциями промежуточного формата, такими как язык ассемблера, или даже исходным кодом. Хотя изобретение было описано на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что изобретение, определенное в прилагаемой формуле изобретения, не обязательно ограничивается описанными признаками или действиями, описанными выше. В действительности, описанные признаки и действия раскрываются в качестве примерных форм осуществления формулы изобретения.
[0052] Специалисты в данной области техники поймут, что раскрытие может осуществляться на практике в сетевых вычислительных средах с множеством типов конфигураций компьютерной системы, включающих в себя встроенный компьютер транспортного средства, персональные компьютеры, настольные компьютеры, компьютеры-ноутбуки, процессоры сообщений, портативные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронику, сетевые PC, миникомпьютеры, компьютеры-мэйнфреймы, мобильные телефоны, PDA, планшеты, пейджеры, маршрутизаторы, переключатели, различные устройства хранения и т. п. Раскрытие может также осуществляться на практике в распределенных системных средах, где и локальные, и удаленные компьютерные системы, которые связываются (либо проводными линиями передачи данных, либо беспроводными линиями передачи данных, либо комбинацией проводных и беспроводных линий передачи данных) через сеть, выполняют задачи. В распределенной системной среде программные модули могут быть расположены как в локальных, так и в удаленных устройствах хранения памяти.
[0053] Кроме того, где надлежит, функции, описанные в настоящем документе, могут выполняться в одном или более из: аппаратных средств, программных средств, программно-аппаратных средств, цифровых компонентов или аналоговых компонентов. Например, одна или более специализированных интегральных цепей (ASIC) может программироваться, чтобы осуществлять одну или более из систем и процедур, описанных в настоящем документе. Конкретные термины используются на протяжении описания и формулы изобретения для ссылки на конкретные системные компоненты. Как будет понятно специалисту в данной области техники, компоненты могут упоминаться под различными наименованиями. Этот документ не предназначен для проведения различия между компонентами, которые отличаться наименованием, но не функцией.
[0054] Следует заметить, что варианты осуществления датчика, рассмотренные выше, могут содержать компьютерные аппаратные средства, программные средства, программно-аппаратные средства или любую их комбинацию, чтобы выполнять по меньшей мере часть их функций. Например, датчик может включать в себя компьютерный код, сконфигурированный для исполнения в одном или более процессорах, и может включать в себя аппаратную логику/электрические цепи, управляемые компьютерным кодом. Эти примерные устройства обеспечены в настоящем документе в целях иллюстрации и не предназначены как ограничивающие. Варианты осуществления настоящего раскрытия могут осуществляться в дополнительных типах устройств, как будет известно специалистам в родственной области(-ях) техники.
[0055] По меньшей мере некоторые варианты осуществления раскрытия были направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программных средств), сохраненную на любом используемом компьютером носителе. Такие программные средства при исполнении в одном или более устройствах обработки данных предписывают устройству функционировать, как описано в настоящем документе.
[0056] В то время как различные варианты осуществления настоящего раскрытия были описаны выше, следует понимать, что они были представлены исключительно в качестве примера и не ограничения. Будет очевидно специалистам в соответствующей области техники, что различные изменения в форме и подробностях могут быть осуществлены над ними без выхода за пределы сущности и объема раскрытия. Таким образом, сущность и объем настоящего раскрытия не должны ограничиваться каким-либо из вышеописанных примерных вариантов осуществления, но должны быть определены только в соответствии с пунктами последующей формулы изобретения и их эквивалентами. Вышеупомянутое описание было представлено в целях иллюстрации и описания. Оно не подразумевается как исчерпывающее или ограничивающее раскрытие точной раскрываемой формой. Множество модификаций и вариаций возможно в свете вышеописанных принципов. Кроме того, следует заметить, что любое или все из вышеупомянутых альтернативных осуществлений могут быть использованы в любой желаемой комбинации, чтобы сформировать дополнительные гибридные осуществления раскрытия.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Система и способ для обмена атрибутами пути из предыстории вождения и компонент прогнозирования пути
Способ обнаружения физических угроз, приближающихся к транспортному средству (варианты), и транспортное средство
Транспортное средство и способ для использования в нем для выявления угрозы в ожидании открывания двери транспортного средства
Система и способ рекомендации радиостанции
Способ, система и машиночитаемые носители хранения данных для обнаружения листвы с использованием данных дальности
Обнаружение пешеходов, когда транспортное средство движется задним ходом
Транспортное средство и способ управления светопроницаемостью окон транспортного средства
Способ обнаружения препятствий, расположенных рядом с транспортным средством
Способ передачи информации о приближении животных к транспортному средству и транспортное средство, использующее его
Обнаружение животного поблизости от транспортного средства

