Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ОТРЕЗКА ПРЯМОЙ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие относится к способу обнаружения отрезка прямой, и в частности к способу обнаружения отрезка прямой для точного определения начальной точки и конечной точки отрезка прямой на изображении.
УРОВЕНЬ ТЕХНИКИ
[0002] В настоящее время, искусственные спутники для различных целей, такие как военные спутники, спутники связи, научные спутники, наблюдательные спутники и навигационные спутники, вращаются на орбитах вокруг Земли. Если такой искусственный спутник прекращает функционировать или истек срок его эксплуатации после отработки заданной цели, спутник часто остается на своей орбите и становится мусором (также называемым космическим мусором). Более того, обломки ракеты и подобного, используемого для запуска искусственного спутника и подобного, тоже остаются на орбите как мусор.
[0003] В настоящее время, на орбите вращается несколько тысяч единиц мусора. В добавление, мусор перешел на стадию самовоспроизводства, на которой количество мусора увеличивается из-за естественного столкновения между собой. Так как возможно, что такой мусор может столкнуться с вращающимся на орбите спутником, который используется в настоящее время, или с ракетой, используемой во время запуска спутника и подобного, требуется способ высокоточного обнаружения.
[0004] Например, так как мусор на низкой околоземной орбите имеет высокую скорость движения, такой мусор выглядит как линейная траектория на изображении. Чтобы определить расположение и пространственное положение мусора, необходимо получить с высокой точностью линейные конечные точки (например, начальную точку и конечную точку) отрезка прямой на изображении. Способ, который использует метод преобразования Хафа, известен в данной области техники для обнаружения линейного объекта на изображении (см. патентную литературу 1).
Список цитируемой литературы
Патентная литература
[0005] Патентная литература 1: Выложенная заявка на патент Японии № 2014-197378
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0006] Однако, в способе, таком как тот, что раскрыт в патентной литературе 1, в котором используется метод преобразования Хафа, может быть обнаружена только прямая линия, появившаяся на изображении, но линейные конечные точки (например, начальная точка и конечная точка) не могут быть обнаружены.
[0007] Настоящее раскрытие было сделано ввиду вышеуказанных обстоятельств. Целью настоящего раскрытия является предоставить способ обнаружения отрезка прямой, который может эффективно и точно обнаруживать конечные точки отрезка прямой на изображении.
РЕШЕНИЕ ПРОБЛЕМЫ
[0008] Согласно аспекту настоящего раскрытия, способ обнаружения отрезка прямой для обнаружения отрезка прямой с изображения, причем способ обнаружения отрезка прямой включает в себя извлечение прямой линии из изображения, которое включает в себя отрезок прямой; получение распределения яркости, включающее в себя получение распределения яркости прямой линии; генерирование модели виртуальной функции, включающее в себя генерирование модели виртуальной функции, которая содержит распределение переднего плана и заднего плана изображения, посредством использования распределения яркости; и оценивание конечных точек, включающее в себя определение, принадлежат ли вероятностно значения яркости вблизи конечных точек отрезка прямой, содержащихся в модели виртуальной функции, к переднему плану или заднему плану, и оценивание конечных точек в модели виртуальной функции.
[0009] Вышеуказанный способ обнаружения отрезка прямой может дополнительно включать в себя циклическое регенерирование модели виртуальной функции посредством использования оцененных значений конечных точек, полученных при оценивании конечных точек.
[0010] Вышеуказанный способ обнаружения отрезка прямой может дополнительно включать в себя принятие решения, является ли обнаружение ошибочным или нет, посредством использования оцененных значений конечных точек, полученных при оценивании конечных точек.
[0011] В вышеуказанном способе обнаружения отрезка прямой, моделью виртуальной функции является любая одна из модели функции правдоподобия, модели пилообразной функции и модели сигмоидальной функции.
[0012] В вышеуказанном способе обнаружения отрезка прямой, оценивание конечных точек может включать в себя оценивание конечных точек посредством использования метода максимального правдоподобия.
[0013] В вышеуказанном способе обнаружения отрезка прямой, изображение содержит мусор, который движется по орбите Земли, и отрезок прямой является траекторией движения мусора.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0014] В способе обнаружения отрезка прямой согласно настоящему раскрытию, посредством получения из изображения, которое включает в себя отрезок прямой, который должен быть обнаружен, распределения яркости прямой линии, которая включает в себя отрезок прямой, генерирования модели виртуальной функции, которая содержит распределение переднего плана и заднего плана, определения, принадлежат ли вероятностно значения яркости вблизи конечных точек в модели виртуальной функции к переднему плану или заднему плану, и оценивания конечных точек на модели виртуальной функции, и корректировки конечных точек, конечные точки (например, начальная точка и конечная точка) отрезка прямой могут быть обнаружены эффективно и точно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015]
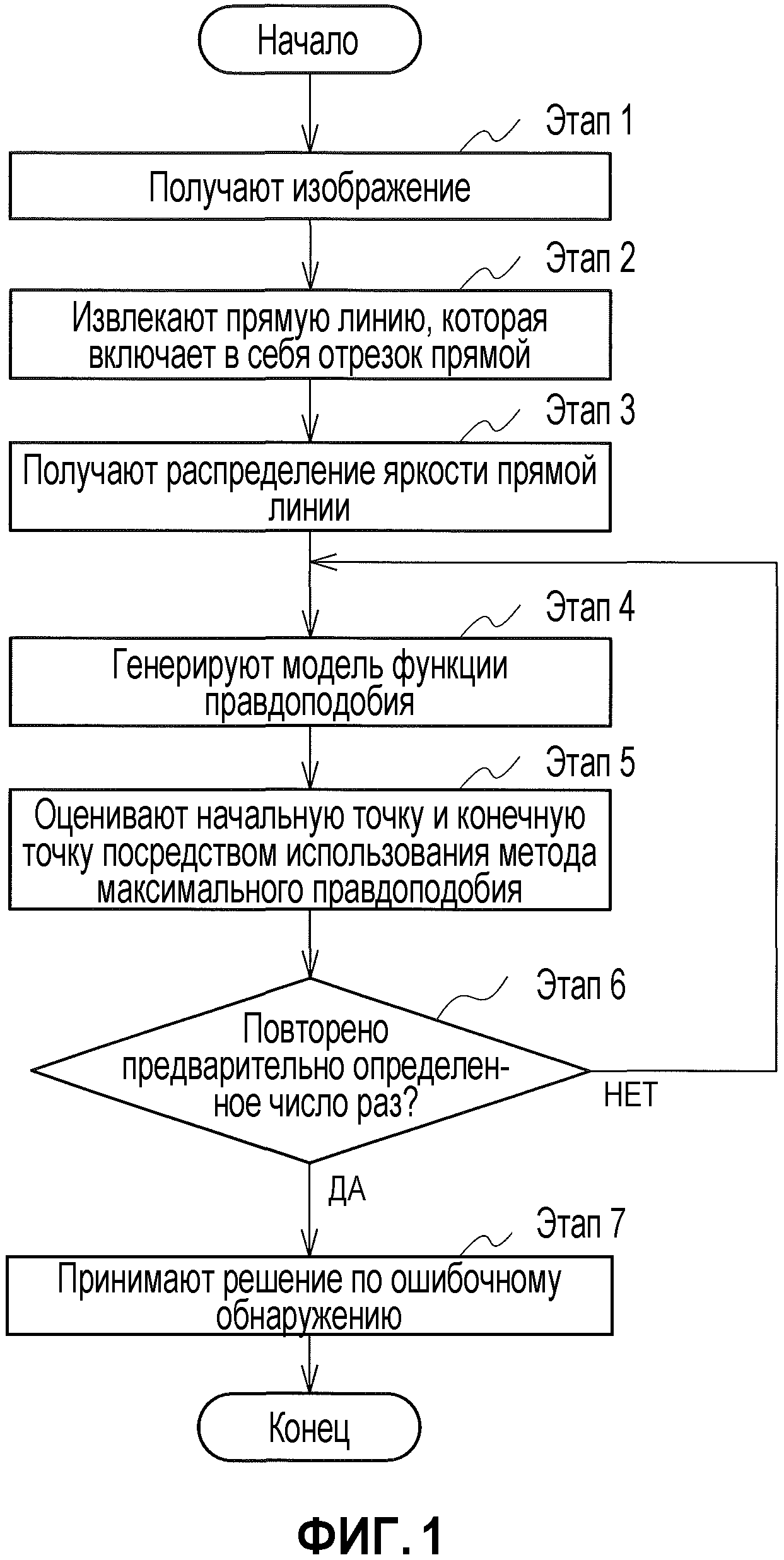
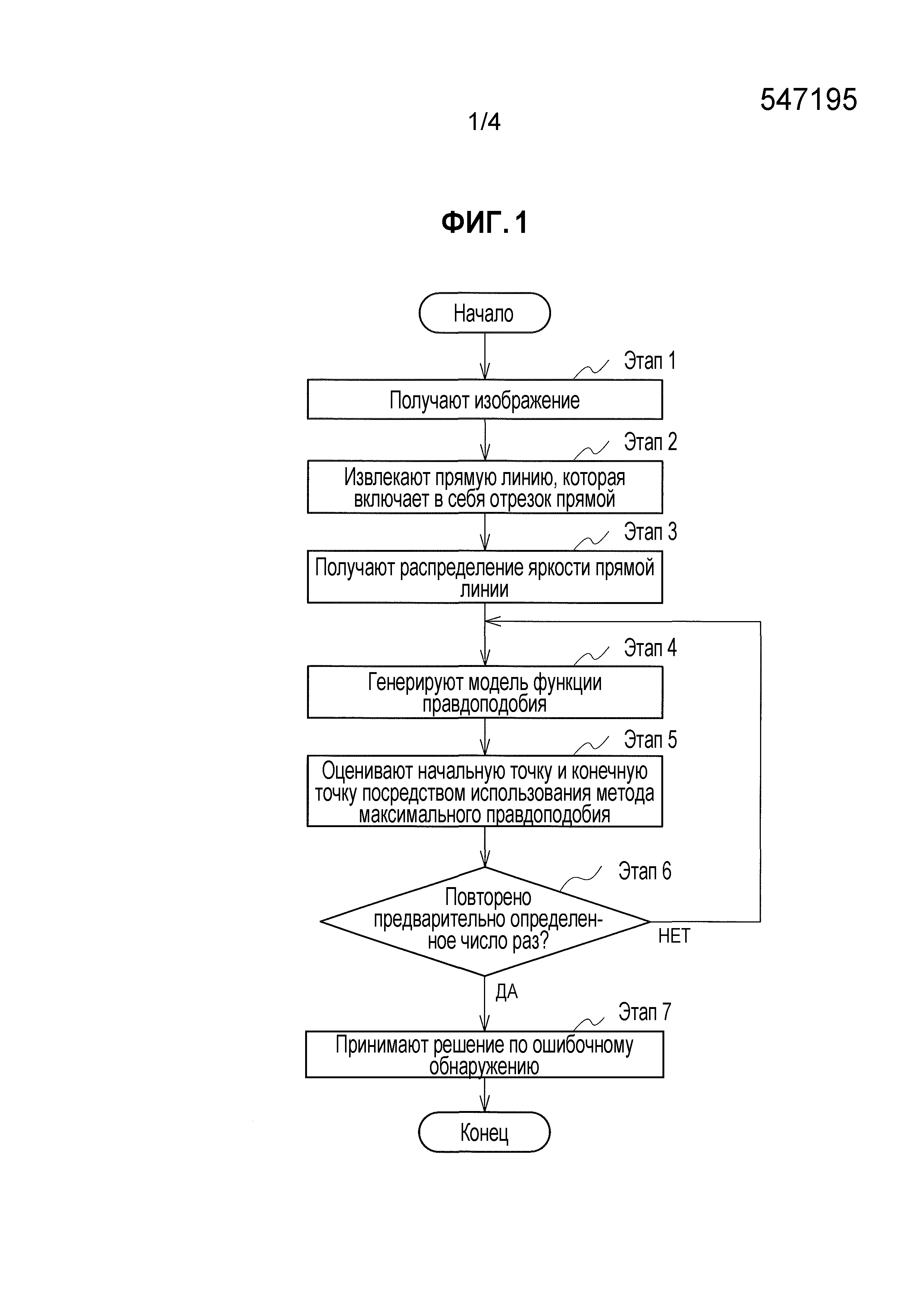
[Фиг. 1] Фиг. 1 является схемой последовательности операций способа обнаружения отрезка прямой согласно варианту осуществления настоящего раскрытия.
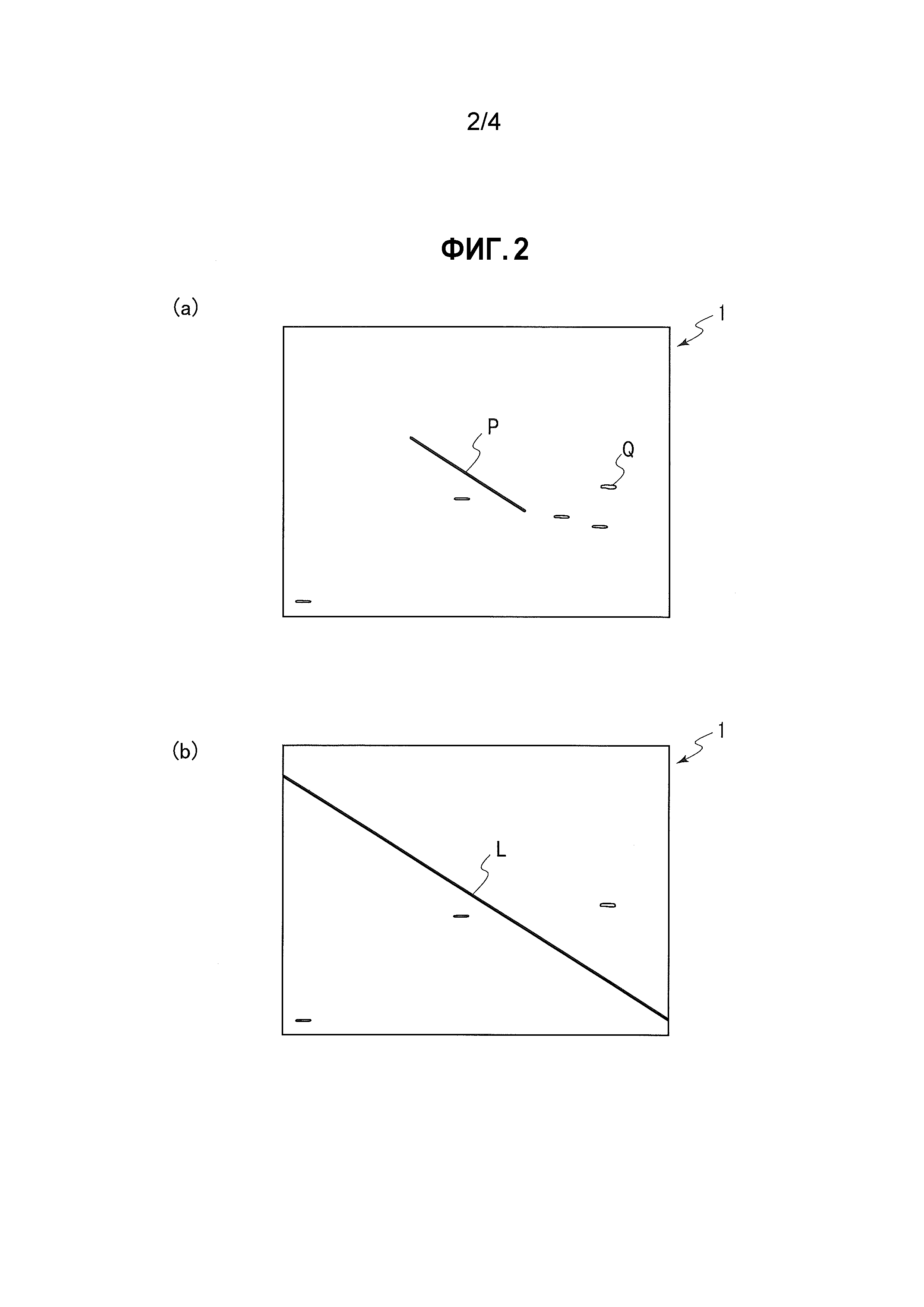
[Фиг. 2] Фиг. 2(a) и 2(b) являются схемами для разъяснения способа обнаружения отрезка прямой, показанного на Фиг. 1, где Фиг. 2(a) иллюстрирует процесс получения изображения, и Фиг. 2(b) иллюстрирует процесс извлечения прямой линии.
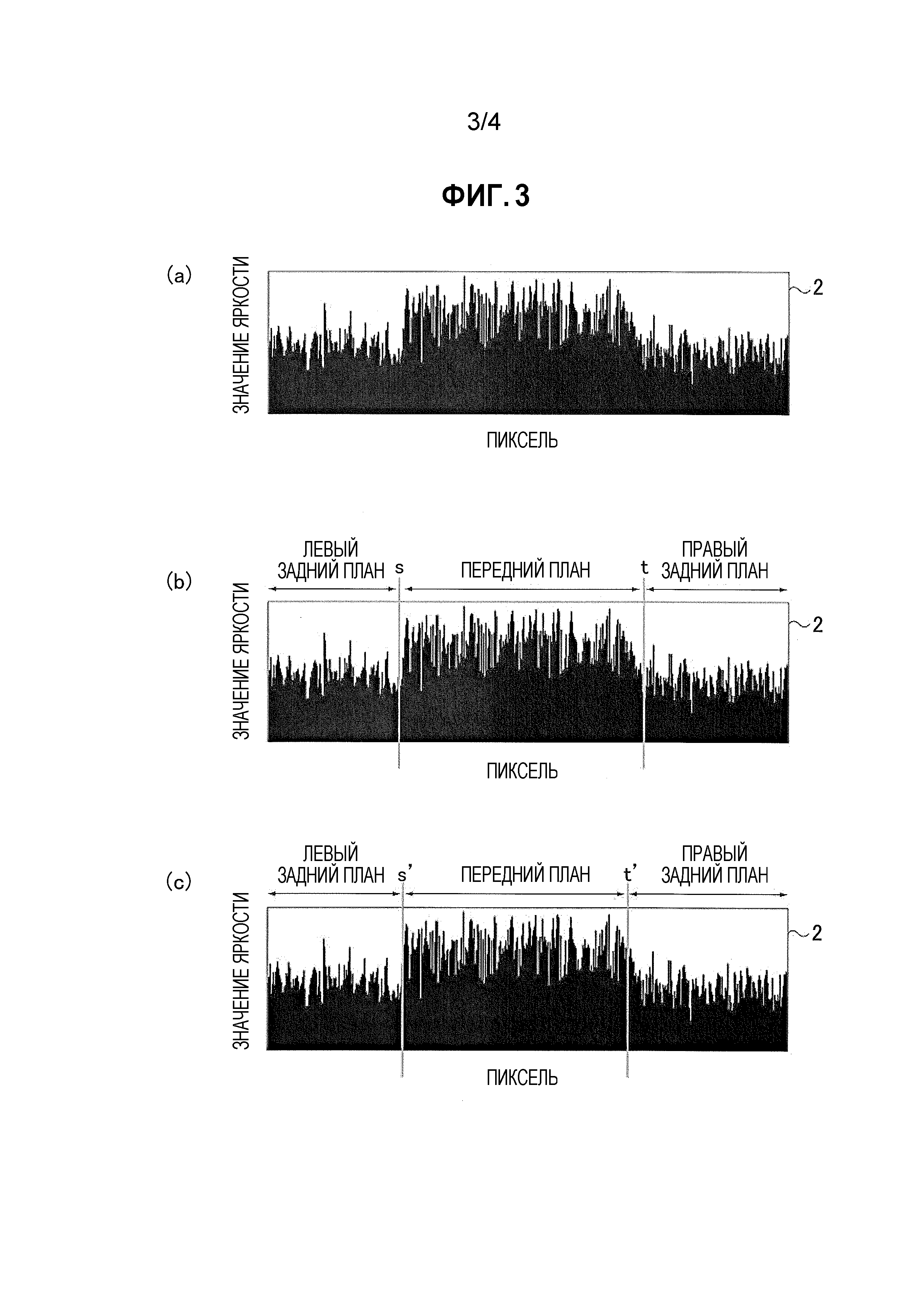
[Фиг. 3] Фиг. 3(a)-3(c) являются схемами для разъяснения способа обнаружения отрезка прямой, показанного на Фиг. 1, где Фиг. 3(a) иллюстрирует процесс получения распределения яркости, Фиг. 3(b) иллюстрирует процесс генерирования модели виртуальной функции, и Фиг. 3(c) иллюстрирует процесс оценивания конечных точек.
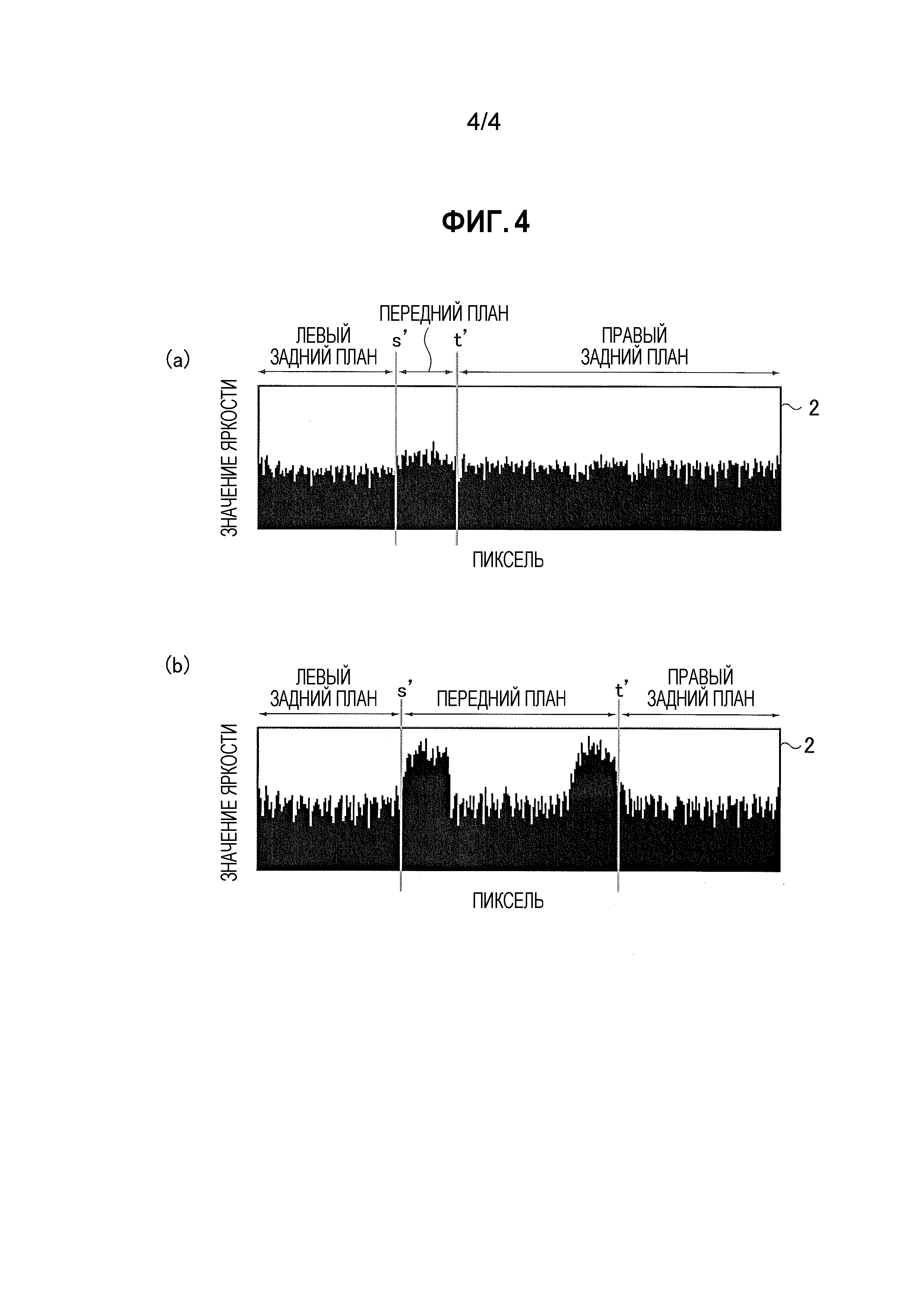
[Фиг. 4] Фиг. 4(a) и 4(b) являются схемами для разъяснения процесса принятия решений в отношении ошибочного обнаружения, где Фиг. 4(a) иллюстрирует распределение яркости, которое включает в себя только задний план, и Фиг. 4(b) иллюстрирует распределение яркости, которое включает в себя две фиксированные звезды.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0016] Примерные варианты осуществления настоящего раскрытия разъясняются ниже со ссылкой на Фиг. 1-4(b). Фиг. 1 является схемой последовательности операций способа обнаружения отрезка прямой согласно варианту осуществления настоящего раскрытия. Фиг. 2(a) и 2(b) являются схемами для разъяснения способа обнаружения отрезка прямой, показанного на Фиг. 1, где Фиг. 2(a) иллюстрирует процесс получения изображения, и Фиг. 2(b) иллюстрирует процесс извлечения прямой линии. Фиг. 3(a)-3(c) являются схемами для разъяснения способа обнаружения отрезка прямой, показанного на Фиг. 1, где Фиг. 3(a) иллюстрирует процесс получения распределения яркости, Фиг. 3(b) иллюстрирует процесс генерирования модели виртуальной функции, и Фиг. 3(c) иллюстрирует процесс оценивания конечных точек. Фиг. 4(a) и 4(b) являются схемами для разъяснения процесса принятия решений в отношении ошибочного обнаружения, где Фиг. 4(a) иллюстрирует распределение яркости, которое включает в себя только задний план, и Фиг. 4(b) иллюстрирует распределение яркости, которое включает в себя две фиксированные звезды.
[0017] Как показано на Фиг. 1-4(b), настоящий вариант осуществления разъясняет способ обнаружения отрезка прямой для обнаружения отрезка прямой P на изображении 1. Способ включает в себя получение изображения 1 (этап 1); извлечение из изображения 1 прямой линии L, которая включает в себя отрезок прямой P (этап 2); получение распределения 2 яркости прямой линии L (этап 3); генерирование модели виртуальной функции Lm, которая содержит распределение переднего плана и заднего плана изображения 1, посредством использования распределения 2 яркости (этап 4); оценивание конечных точек, включающее в себя определение, принадлежат ли вероятностно значения яркости вблизи конечных точек (начальной точки s и конечной точки t) отрезка прямой P, содержащихся в модели виртуальной функции Lm, к переднему плану или заднему плану, и оценивание конечных точек (начальной точки s' и конечной точки t') в модели виртуальной функции Lm (этап 5); циклическое регенерирование модели виртуальной функции Lm посредством использования оцененных значений начальной точки s' и конечной точки t', полученных при оценивании конечных точек на этапе 5 (этап 6); и принятие решения, является ли обнаружение ошибочным или нет, посредством использования оцененных значений начальной точки s' и конечной точки t', полученных при оценивании конечных точек на этапе 5 (этап 7).
[0018] Получение изображения (этап 1) включает в себя ввод в блок обработки изображения компьютера, и подобного, изображения 1, которое включает в себя траекторию движения мусора. Изображение 1 получается, например, посредством использования устройства визуализации, в котором CCD-камера и подобная соединена с астрономическим телескопом. Изображение 1 получается, например, посредством использования предварительно определенной области неба с временем выдержки, которое обеспечивает возможность визуализации траектории движения мусора на низкой околоземной орбите (LEO), который должен быть обнаружен, как отрезка прямой P, имеющего фиксированную длину.
[0019] На изображении 1, показанном на Фиг. 2(a), участок Q обозначает участок с высоким значением яркости (например, фиксированную звезду). Так как этот участок Q может вызвать ошибочное обнаружение, такой участок удаляется заранее с изображения 1 посредством использования способа обработки изображения общего назначения. В качестве способа удаления участка Q, например, может быть использован способ, раскрытый в патентной литературе 1, и подобный. Может быть предпочтительно перевести изображение 1 в двоичный формат до перехода к обработке по извлечению прямой линии (этап 2).
[0020] Как показано на Фиг. 2(b), извлечение прямой линии (этап 2) включает в себя, например, извлечение, посредством использования метода преобразования Хафа, прямой линии L, которая включает в себя отрезок прямой P. В методе преобразования Хафа, принципиально выполняются нижеследующие процессы. Сначала, на изображении 1 задается одна базовая точка, и от этой базовой точки проводится множество прямых линий под разными углами. Этот процесс повторяется при перемещении базовой точки в направлении оси X и направлении оси Y изображения 1, чтобы задать бесчисленное множество прямых линий на изображении 1. Затем, прямая линия, на которой пиксели на отрезке прямой P перекрываются больше всего, извлекается как прямая линия L. Прямая линия L, однако, может быть извлечена посредством использования способа, который не использует метод преобразования Хафа.
[0021] Как показано на Фиг. 3(a), получение распределения яркости (этап 3) включает в себя извлечение вдоль прямой линии L значения яркости (интенсивности) на прямой линии L, извлеченной в процессе извлечения прямой линии (этап 2), и получение распределения яркости 2. На Фиг. 3(a), горизонтальная ось указывает пиксели, присутствующие на прямой линии L, и вертикальная ось указывает значение яркости. Значение яркости является данными, которые могут быть легко получены во время визуализации, пока используется устройство визуализации общего назначения. Для получения распределения яркости, может быть использован способ общего назначения, такой как билинейный метод, метод ближайших соседей, бикубический метод.
[0022] Как показано на Фиг. 3(b), генерирование модели виртуальной функции (этап 4) включает в себя генерирование модели функции правдоподобия (модели виртуальной функции Lm), которая содержит распределение переднего плана и заднего плана. В процессе генерирования модели виртуальной функции, начальная точка s и конечная точка t виртуально задаются в произвольных расположениях, и часть, которая находится в пределах начальной точки s и конечной точки t предполагается как передний план (участок, который включает в себя мусор), и оставшийся участок предполагается как задний план (участок, который не включает в себя мусор) для генерирования модели функции правдоподобия (модели виртуальной функции Lm) как представлено выражением 1. В нижеследующем разъяснении, для удобства, участок с левой стороны от начальной точки s называется левым задним планом, и участок с правой стороны от конечной точки t называется правым задним планом.
[0023]
[Уравнение 1]

(Выражение 1)
Здесь, Ii (здесь 1≤i≤n) является значением яркости каждого пикселя, присутствующего на прямой линии L; n является числом пикселей, присутствующих на прямой линии L; μfg- (в данном выражении, черточка (полоска) находится над μ) является средним значением яркости (оцененным значением) переднего плана; σfg- (в данном выражении, черточка (полоска) находится над σ) является стандартным отклонением (оцененным значением) переднего плана; μbg является средним значением яркости (оцененным значением) заднего плана; σbg является стандартным отклонением (оцененным значением) заднего плана; s является начальной точкой; и t является конечной точкой.
[0024] С правой стороны от модели функции правдоподобия (модели виртуальной функции Lm) в выражении 1, элементы первого ряда представляют левый задний план, элементы второго ряда представляют передний план, и элементы третьего ряда представляют правый задний план. Такая модель функции правдоподобия (модель виртуальной функции Lm) может быть легко спроектирована специалистом в данной области техники посредством объединения ступенчатой функции и гауссова шума. Чтобы сгенерировать модель функции правдоподобия (модель виртуальной функции Lm), используются среднее значение яркости и стандартное отклонение переднего плана, и среднее значение яркости и стандартное отклонение заднего плана.
[0025] При генерировании модели функции правдоподобия, начальная точка s и конечная точка t переднего плана являются виртуальными конечными точками. Вследствие этого, среднее значение яркости и стандартное отклонение переднего плана являются оцененными значениями. Более того, среднее значение яркости и стандартное отклонение заднего плана могут быть получены либо из распределения 2 яркости или первоначального изображения 1.
[0026] Модель функции правдоподобия, представленная выражением 1, является лишь примером модели виртуальной функции Lm. Модель виртуальной функции Lm может быть спроектирована посредством использования пилообразной функции, сигмоидальной функции, или их комбинации с гауссовым шумом и подобным.
[0027] Как показано на Фиг. 3(c), оценивание конечных точек (этап 5) включает в себя оценивание с большей долей вероятности начальной точки s' и конечной точки t' посредством перемещения начальной точки s и конечной точки t на прямой линии (в направлении слева направо на схеме), так чтобы распределение переднего плана в модели функции правдоподобия (модели виртуальной функции Lm) совпадало с распределением 2 яркости. Начальная точка s' и конечная точка t' оцениваются посредством повторения процесса определения, принадлежат ли вероятностно (или статистически) значения яркости вблизи начальной точки s и конечной точки t отрезка прямой P, содержащихся в модели виртуальной функции Lm, к переднему плану или заднему плану.
[0028] Этот процесс обычно называется методом максимального правдоподобия, и посредством использования метода максимального правдоподобия, могут быть обнаружены более точные конечные точки (начальная точка и конечная точка) отрезка прямой P. Однако, при перемещении начальной точки s и конечной точки t на прямой линии (в направлении слева направо, показанном на Фиг. 3(b)), расположение одной из конечных точек может быть фиксированным, и расположение другой конечной точки может быть перемещено.
[0029] Конкретно, при изменении начальной точки s и конечной точки t модели функции правдоподобия и использования этих значений, правдоподобие яркости на прямой линия L вычисляется посредством использования выражения 1. Фактически, значения вычисляются посредством взятия логарифма из выражения 1. Затем, значения s и t, правдоподобие является наибольшим, оцениваются как финальная начальная точка s' и финальная конечная точка t'. Доступны различные способы, чтобы предложить параметры для получения максимально правдоподобных значений в двухмерном пространстве (s, t). В алгоритме согласно настоящему варианту осуществления, начальная точка s' и конечная точка t' оцениваются одна за другой. Это так потому, что прямая линия L, полученная посредством использования метода преобразования Хафа, включает в себя мусор, и нет необходимости осуществления поиска во всем пространстве, одновременно изменяя начальную точку s и конечную точку t, и так как, в модели виртуальной функции Lm, изменение в расположении одной конечной точки между начальной точкой s и конечной точкой t не оказывает значительного влияния на изменение в расположении другой конечной точки (то есть, взаимная зависимость между начальной точкой s и конечной точкой t является высокой).
[0030] Повторение (этап 6) включает в себя регенерирование модели виртуальной функции (модели виртуальной функции Lm) посредством использования начальной точки s' и конечной точки t', полученных посредством оценивания конечных точек (этап 5). Таким образом, посредством циклического регенерирования модели функции правдоподобия (модель виртуальной функции Lm) и оценивания начальной точки и конечной точки, расположения конечных точек (начальной точки и конечной точки) отрезка прямой P могут быть обнаружены более точно. Однако, число раз, которое должен быть повторен процесс повторения (этап 6), может быть задано по желанию. В качестве альтернативы, процесс может быть опущен, если необходимо.
[0031] Принятие решения в отношении ошибочного обнаружения (этап 7) включает в себя процесс, выполняемый для устранения ошибочного обнаружения, вызванного внешними помехами. Фиг. 4(a) иллюстрирует пример распределения яркости, которое указывает только задний план, который не включают в себя мусор на прямой линии L. Фиг. 4(b) иллюстрирует пример распределения яркости, который включает в себя две фиксированные звезды на прямой линии L. Принятие решения в отношении ошибочного обнаружения может быть основано на величине соотношения S/N (соотношения сигнал-шум), и принятие решения в отношении вариации яркости может быть основано на значении квадрата χ (χ2).
[0032] Например, как показано на Фиг. 4(a), когда часть заднего плана (то есть, участок, оцененный как передний план) обнаружен ошибочно как участок, который включает в себя мусор, соотношение S/N (то есть, разделение значений яркости между задним планом и передним планом) уменьшается. Вследствие этого, посредством задания соответствующего порогового значения для соотношения S/N, можно принять решение, что обнаружение является ошибочным, когда соотношение S/N меньше, чем пороговое значение, и можно принять решение, что мусор обнаружен, когда соотношение S/N больше, чем пороговое значение.
[0033] Например, как показано на Фиг. 4(b), когда участок, который включает в себя две фиксированные звезды, ошибочно обнаружен как участок, который включает в себя мусор, вариация значений яркости на оцененном переднем плане увеличивается. В таком случае, посредством задания соответствующего порогового значения для значения квадрата χ, можно принять решение, что обнаружение является ошибочным, когда значение квадрата χ больше, чем пороговое значение, и можно принять решение, что мусор обнаружен, когда значение квадрата χ меньше, чем пороговое значение.
[0034] С помощью способа обнаружения отрезка прямой согласно настоящему варианту осуществления, конечные точки (начальная точка и конечная точка) отрезка прямой P могут быть эффективно и точно обнаружены из захваченного изображения 1. Вследствие этого, посредством использования способа обнаружения отрезка прямой согласно настоящему варианту осуществления, точное расположение и скорость мусора могут быть легко определены из изображения 1, и точная орбита мусора может быть получена в короткое время.
[0035] Выше был разъяснен случай, в котором мусор обнаружен из изображения 1. Однако, настоящее раскрытие не ограничивается этим случаем. Поскольку отрезок прямой должен быть обнаружен из изображения, которое включает в себя отрезок прямой, из которого может быть получено распределение яркости, способ обнаружения отрезка прямой, разъясненный выше, может быть легко применен к другим областям (например, извлечение белой линии дороги и подобного).
[0036] Настоящее раскрытие не ограничивается вышеуказанными вариантами осуществления, и может быть модифицировано различными способами без отступления от сущности настоящего раскрытия.
Способ обнаружения космических обломков
Устройство для экспериментов по воспламенению
Ультразвуковое устройство обнаружения дефектов, ультразвуковой преобразователь и ультразвуковой способ обнаружения дефектов
Флуорохромный материал и способ его применения
Лопатка ротора вентилятора и вентилятор
Комплексное соединение металл-сален и способ его получения
Лекарственное средство против опухоли головного мозга
Крепежная конструкция направляющих лопастей и вентилятор
Крепежная бобышка и кожух вентилятора
Способ фрикционного соединения и соединенная структура

