Результат интеллектуальной деятельности: ЭКЗОСКЕЛЕТ
Вид РИД
Изобретение
Изобретение относится к медицинской технике, а именно к травматологии и ортопедии, а также может быть использовано в туризме и спорте.
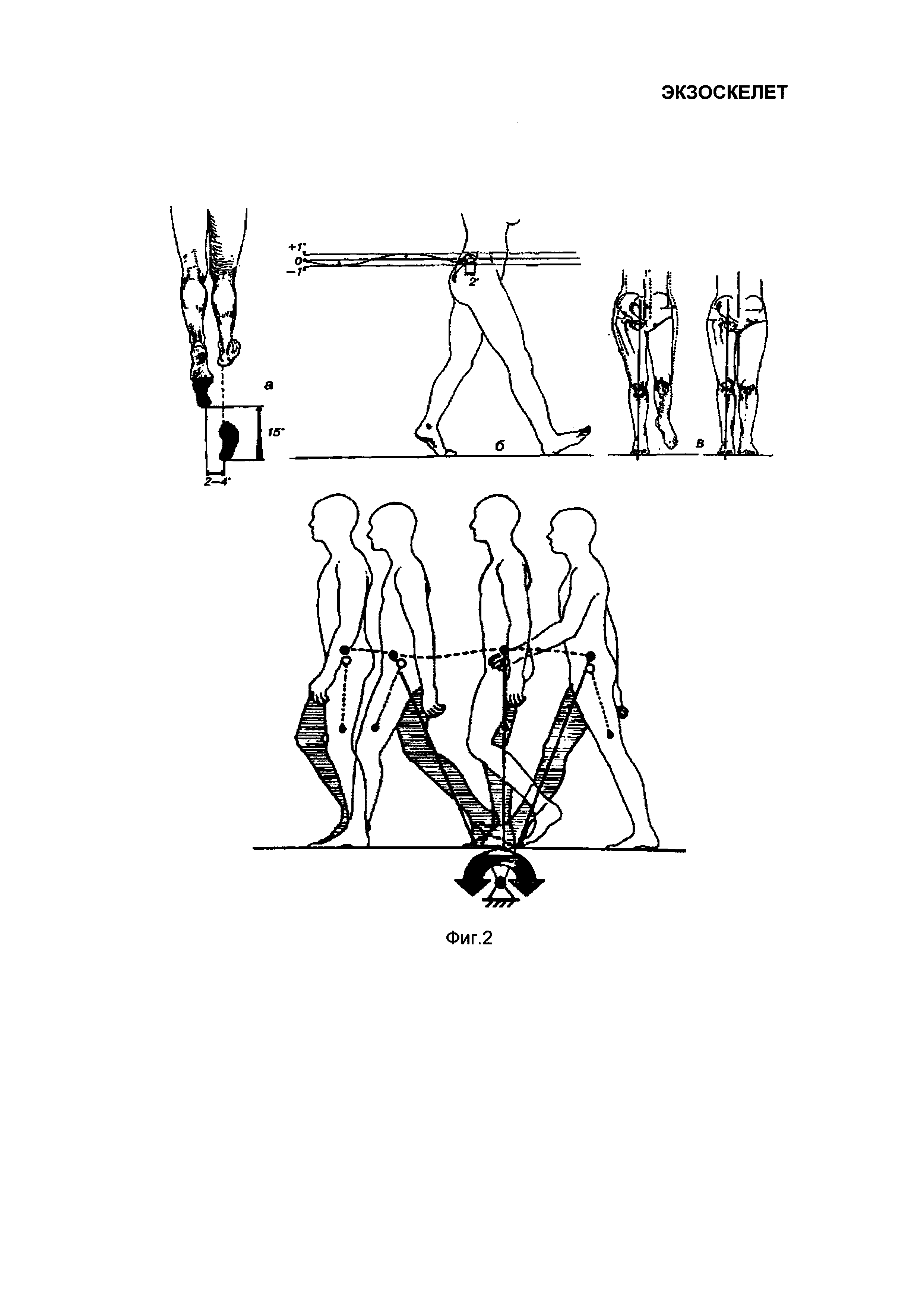
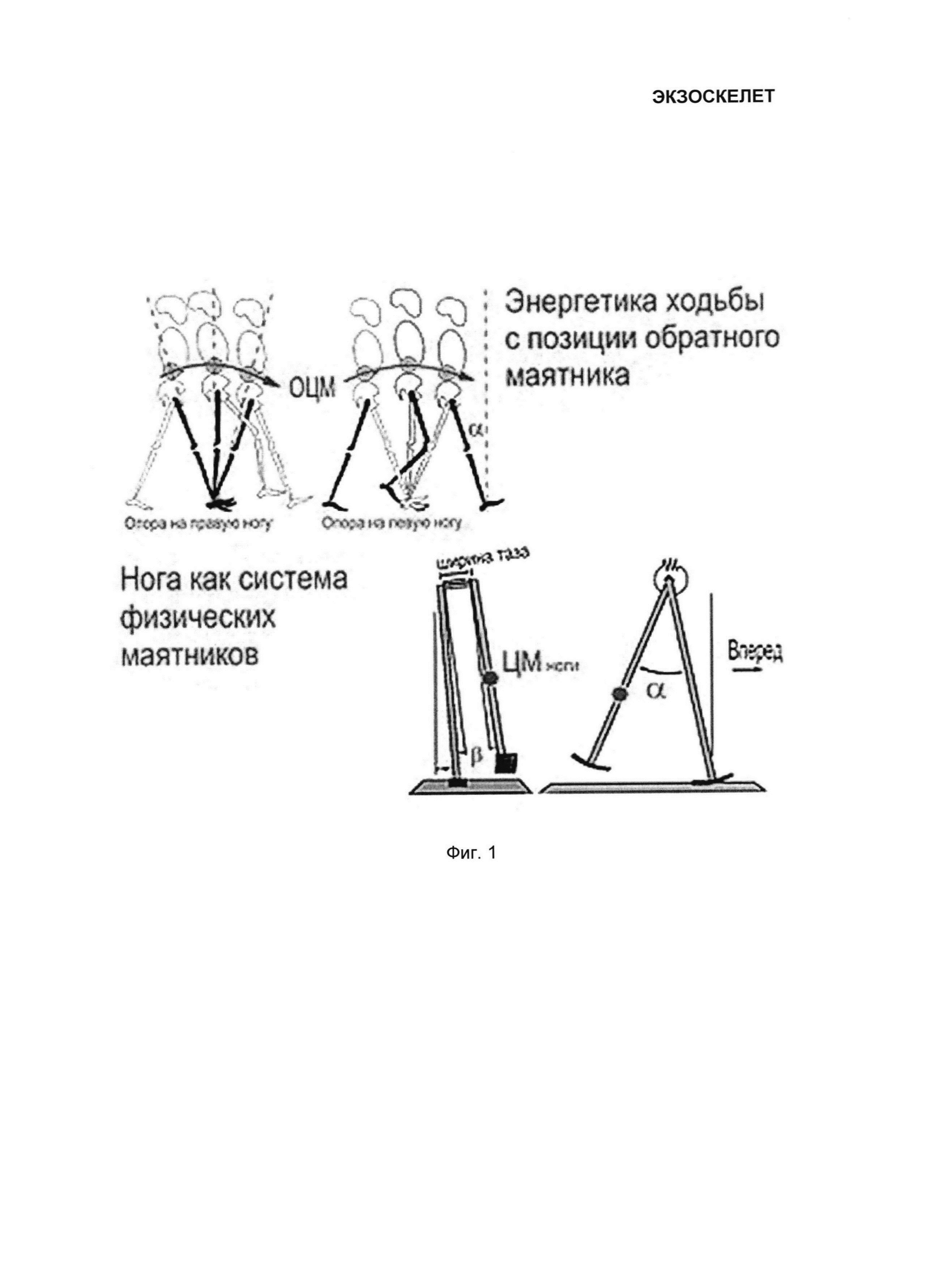
Перед обозначением технической проблемы, рассмотрим общие принципы передвижения человека. Согласно биомеханике, основной механизм, определяющий эффективность ходьбы - это перемещение общего центра масс (ОЦМ). Полный цикл ходьбы - период двойного шага - складывается для каждой ноги из фазы опоры (нога является опорной или толчковой) и фазы переноса конечности (нога является маховой). В точности, когда одна нога является маховой и совершает маятниковое движение, как физический (подвешенный) маятник, из крайнего заднего положения в крайнее переднее положение, другая нога является опорной и в то же самое время совершает движение обратного (перевернутого по принципу метронома) маятника (https://ru.wikipedia.org/wiki/%D0%A5%D0%BE%D0%B4%D1%8C%D0%B1%D0%B0%D1%87%D0%B5%D0%BB%D0%BE%D0%B2%D0%B5%D0%BA%D0%B0. см. фиг. 1). Такое одновременное движение опорной и маховой ноги при обычной ходьбе приводит к тому, что ОЦМ перемещается по синусоиде как в вертикальной плоскости в среднем на 5 см, так и в горизонтальной плоскости в среднем на 2,5 см (В.И. Дубровский, В.Н. Федорова. Биомеханика: Учеб. для сред и высш. учеб. заведений. Издательство «Владос Пресс», Москва, 2003., с. 315, см. фиг. 2). Известно, что маятник имеет максимум потенциальной энергии в высшей точке и превращает ее в кинетическую, отклоняясь вниз. В начале фазы опоры, как только ОЦМ в тазу начинает подниматься, кинетическая энергия движения превращается в потенциальную, и наоборот, переходит в кинетическую, когда ОЦМ в тазу опускается в конце фазы опоры. Таким образом, сохраняется около 65% энергии. Мышцы включаются для перемещения ОЦМ из нижнего положения в верхнее, восполняют утраченную энергию, которая составляет около 35% (https://ru.wikipedia.ora/wiki/%D0%A5%D0%BE%D0%B4%D1%8C%D0%B1%D0%B0%D1%87%D0%B5%D0%BB%D0%BE%D0%B2%D0%B5%D0%BA%D0%B0).
В итоге, обычная ходьба представляет собой последовательность шагов, в реализации которых лежит маятниковое движение ног при использовании большого числа мышц разгибателей (трехглавая мышца голени, четырехглавая мышца бедра, большая и средняя ягодичные мышцы и др.) и сгибателей ноги (передняя большеберцовая мышца, полуперепончатая мышца и др.), а также голеностопных и тазобедренных суставов. При обычном шаге, для перемещения маховой ноги из заднего положения в переднее без касания земли, она усилием мышц сгибается в колене и приподнимается, а затем разгибается и выносится вперед. Одновременно с этим, из позиции, когда обе ноги проходят мимо друг друга, опорная нога усилием икроножной мышцы приподнимает вес всего тела вверх и делает толчок вперед с последующим снижением. Таким образом, каждый шаг представляет собой подъем массы тела и небольшое падение сверху вниз со значительной нагрузкой на мышцы, суставы и позвоночник, что является вредным особенно после 40-45 лет.
При слабости мышц, болезнях голеностопных, тазобедренных суставов, позвоночника, а также повреждении сухожилий передвижение вызывает дискомфорт и болезненные ощущения, что приводит к необходимости использования дополнительного оборудования и отражается, в том числе, на ухудшении психоэмоционального состояния человека, особенно пожилых людей. Также усталость от нагрузки и дискомфортные ощущения могут возникнуть и у здоровых людей, например, при пеших походах на дальние расстояния.
В подобных случаях могут использоваться конструкции экзоскелетов, которые снижают нагрузку с мышц и суставов и позволяют оставаться на своих ногах и осуществлять передвижение самостоятельно без привлечения посторонней помощи. Однако известные устройства являются громоздкими и дорогостоящими и не всегда подходят для использования, как в медицинских целях, так и для занятия спортом и туризмом.
Известны конструкции экзоскелетов (патент РФ №2598124, 20.09.2016 г., патент РФ №2567589, 10.11.2015 г.), которые содержат корсет, закрепляемый на тазобедренной части, связанный посредством стоек, подшипников и других дополнительных элементов с конструкцией, закрепляемой на голеностопной части.
Указанные конструкции позволяют снизить нагрузку с тазобедренных и голеностопных суставов, однако являются сложными, громоздкими и имеют высокую стоимость. При этом снижение нагрузки на суставы происходит за счет обеспечения вертикального положения тела и сковывания движения таза и ног по всей их длине, что не позволяет полноценно снизить нагрузку с мышц, а также ограничивает применение конструкции только медицинским назначением для реабилитации конечностей, не позволяя использовать ее при занятии туризмом и спортом.
Известна конструкция упругих элементов (патент РФ №125745, 10.03.2013 г.), прикрепляемых на подошву ботинок, включающих дугообразные упругие пластины, расположенные вогнутостями навстречу друг другу, совмещенные концы которых закреплены на усилительном элементе в виде пластины, размещенной между упругими элементами и выполненной на концах с гнездами для в них концов этих пластин, при этом верхнерасположенная упругая пластина прикреплена к подошве ботинка, на наружной поверхности нижнерасположенной упругой пластины прикреплен протектор для повышения сцепления, для подошвы каждого ботинка применена опорная пластина, прикрепляемая к подошве и выполненная с элементами прикрепления к ней верхнерасположенной упругой пластины, при этом опорная пластина, также конструкция имеет усилительные элементы, съемные протекторы, упругие упоры для равномерного распределения нагрузки по поверхности подошвы и пластин.
Указанная конструкция упругих элементов также является сложной, предназначенной для выдерживания больших динамических нагрузок при активных видах движения, связанных с прыжками, в том числе, при выполнении акробатических упражнений. В данном случае преобладает фаза опоры с накоплением потенциальной энергии при сжатии пластин с последующей реализацией шага за счет прыжка при использовании кинетической энергии выпрямленных пластин. Таким образом, подобная конструкция не позволяет снизить нагрузку на голеностопные и тазобедренные суставы и поэтому не может быть использована в медицинских целях для помощи пациентам с ограниченными возможностями перемещения.
Известна конструкция пассивного экзоскелета голеностопа (патент РФ №166055, 10.11.2016 г.), принятого за наиболее близкий аналог к заявляемому решению, содержащего подошву, две пары голеностопных рычагов, элементов его крепления к голени, при этом голеностопные рычаги выполнены сборными из двух частей - дугообразных жестких конструкционных элементов, соединенных между собой посредством шарниров с элементами фиксации, к основаниям нижнего дугообразного конструкционного элемента и к задней части подошвы жестко прикреплены два пружинных амортизатора, а фиксация на ноге пассивного экзоскелета голеностопа осуществляется за счет дуги жестко прикрепленной к верху подошвы в ее передней части и дугообразных жестких конструкционных элементов и ременного соединения, жестко закрепленного на фронтальной поверхности верхней части пассивного экзоскелета голеностопа.
Указанная конструкция позволяет снизить нагрузку с нижней части ноги - икроножной мышцы и голеностопного сустава, - что позволяет использовать ее для медицинских целей и при пеших походах. Однако в данном случае сохраняется принцип передвижения опорной и маховой ноги, описанный выше, при котором ОЦМ значительно перемещается в вертикальной плоскости (на 4-5 см), что не позволяет снизить нагрузку с мышц и суставов и приводит к ограничению применения конструкции при наличии у пациентов болевых ощущений в данной области.
Задачей изобретения является получение универсальной конструкции экзоскелета, которая может быть использована в медицине, спорте и туризме.
Техническим результатом изобретения является снижение нагрузки на мышцы ног, суставы и сухожилия за счет выравнивания траектории движения ОЦМ при усовершенствовании механизма маятникового движения опорной и маховой ноги.
Технический результат достигается при использовании экзоскелета, содержащего верхнее и нижнее опорные устройства, расположенные под стопой человека и соединенные между собой посредством устройства, имеющего возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств в сжатом или раздвинутом положениях, которое выполнено в виде шарнирно-подвижной опоры, соединенной одним концом с нижним опорным устройством с возможностью перемещения, и закрепленную другим концом на верхнем опорном устройстве с возможностью вращения вокруг поперечной оси, при этом нижнее опорное устройство выполнено с возможностью выдвижения в вертикальной плоскости относительно верхнего опорного устройства, при переносе ноги из крайнего заднего положения в крайнее переднее положение.
Под опорным устройством в контексте настоящего изобретения понимается устройство, предназначенное для опоры и переноса веса человека при ходьбе с целью перемещения.
Верхнее опорное устройство может представлять собой платформу, соединяемую с подошвой обуви с повторением ее контура или подошву обуви. Также верхнее опорное устройство может иметь устройства его закрепления на стопе ноги или обуви (ремни, резинки и т.д.).
Нижнее опорное устройство может представлять собой платформу для перемещения по земной поверхности, часть лыжного крепления, наконечник ходули, и т.д., контактирующий с земной поверхностью.
В зависимости от роста человека нижнее опорное устройство после сжатия может выдвигаться в вертикальной плоскости относительно верхнего опорного устройства на 8-15 см для полного исключения касания земли маховой ногой с выпрямленным коленом при ее переносе из крайнего заднего положения (позиция а на фиг. 4) в крайнее переднее положение (позиция а2 на фиг. 4).
Наличие верхнего и нижнего опорных устройств, соединенных друг с другом посредством устройства, имеющего возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств в сжатом и раздвинутом положении, а также закрепление верхнего опорного устройства на подошве обуви или стопе ноги позволяет:
- сжимать опорные устройства друг с другом с фиксацией данного положения, что позволяет маховой ноге без соприкосновения с землей совершить движение из крайнего заднего положения (позиция а на фиг. 4) вперед в крайнее переднее положение (позиция а2 на фиг. 4);
- раздвинуть опорные устройства на 8-15 см друг от друга с фиксацией данного положения в крайнем переднем положении маховой ноги (позиция а2 на фиг. 4) для обеспечения возможности переноса на нее веса человека в момент, когда маховая нога становится опорной;
- совершить одновременное маятниковое движение маховой ногой, задающее смещение ОЦМ в вертикальной плоскости, которое противоположно направлено вертикальному смещению, задаваемому при обратном маятниковом движении опорной ноги, с целью компенсации смещения ОЦМ, которое имело место при обычной ходьбе.
Таким образом, опорная нога располагается на возвышении относительно линии земли, задаваемом за счет зафиксированного раздвинутого положения опорных устройств, а маховая нога в то же самое время при сжатых друг с другом опорных устройствах в свободном подвешенном состоянии с прямым коленом опускается относительно опорной ноги на 4-7 см и совершает свободное маятниковое движение без соприкосновения с землей из крайнего заднего положения в крайнее переднее положение (см. фиг. 4).
В итоге, ходьба человека с использованием заявляемого экзоскелета позволяет:
- выровнять траекторию движения ОЦМ;
- свести к минимуму нагрузку на мышцы за счет свободного маятникового движения маховой ноги с прямым коленом;
- максимально снизить нагрузку на суставы (голеностопный, тазобедренный и др.), позвоночник и сухожилия
- сохранить привычный принцип маятникового движения и усовершенствовать его с достижением высокого показателя КПД.
Изобретение поясняется следующими фигурами.
На фиг. 1 показан принцип обратного маятника при переносе опорной и маховой ноги при простой ходьбе.
На фиг. 2 показан движение ОЦМ по синусоиде при простой ходьбе.
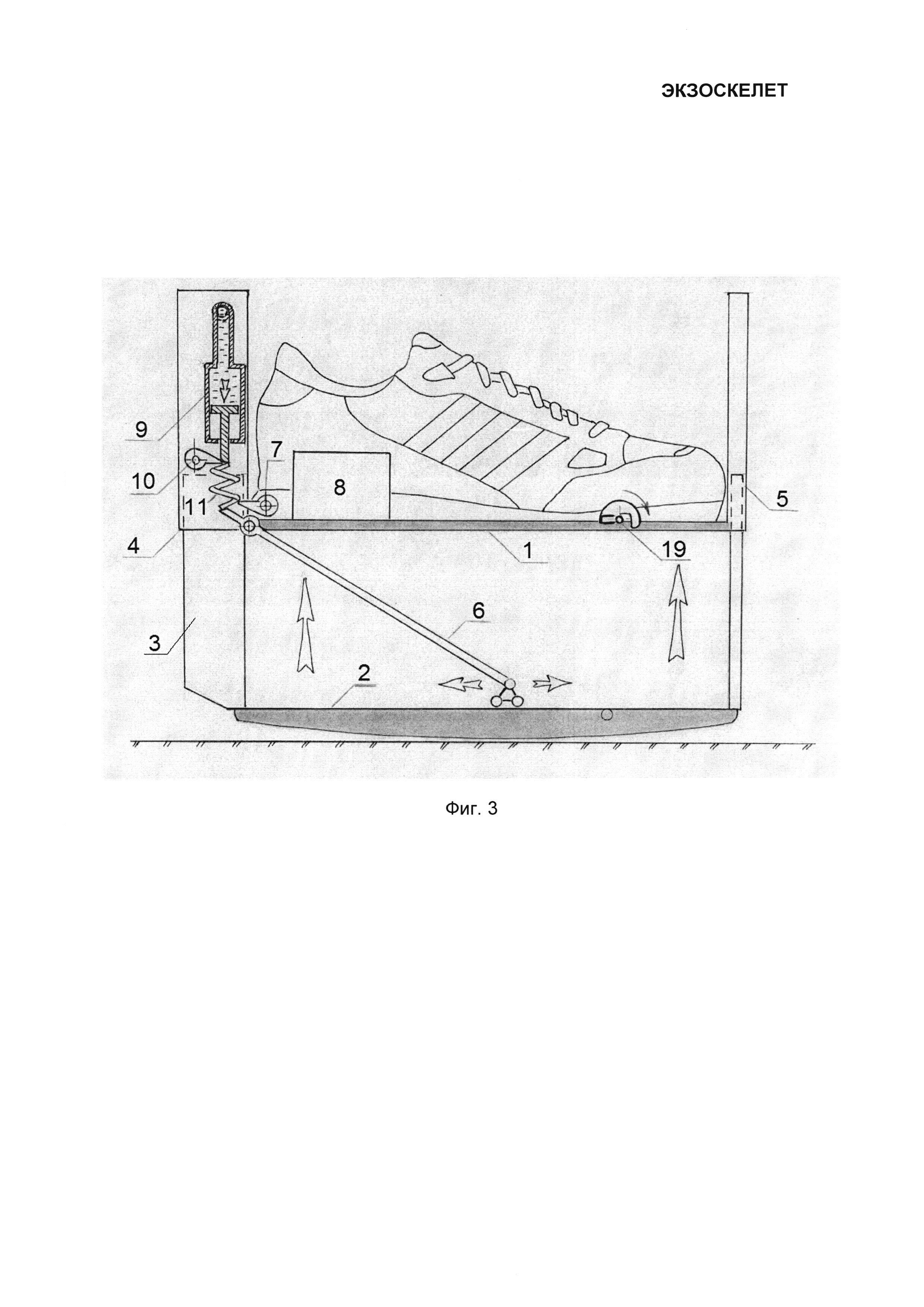
На фиг. 3 показана конструкция заявляемого экзоскелета.
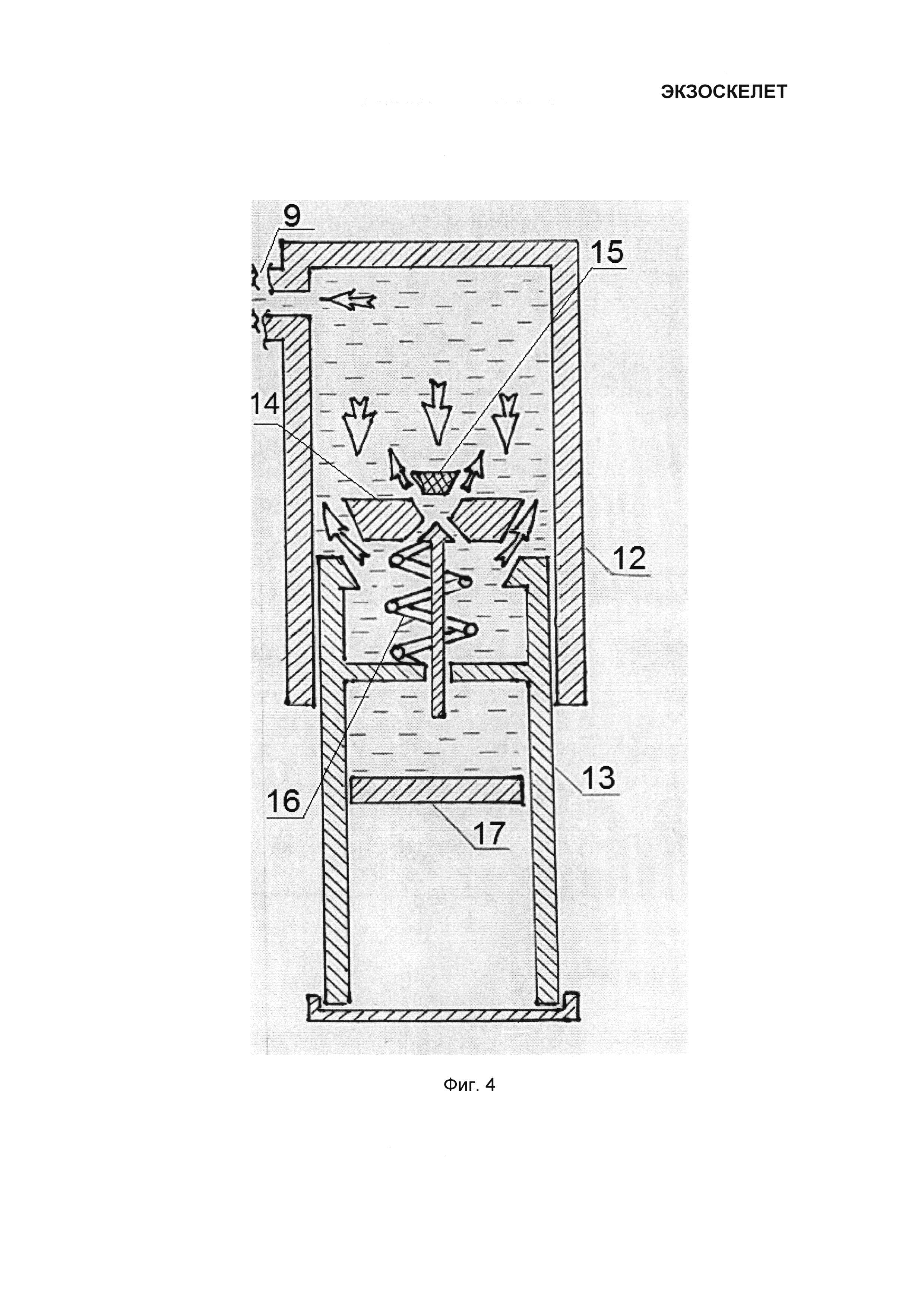
На фиг. 4 показана конструкция гидравлического цилиндра.
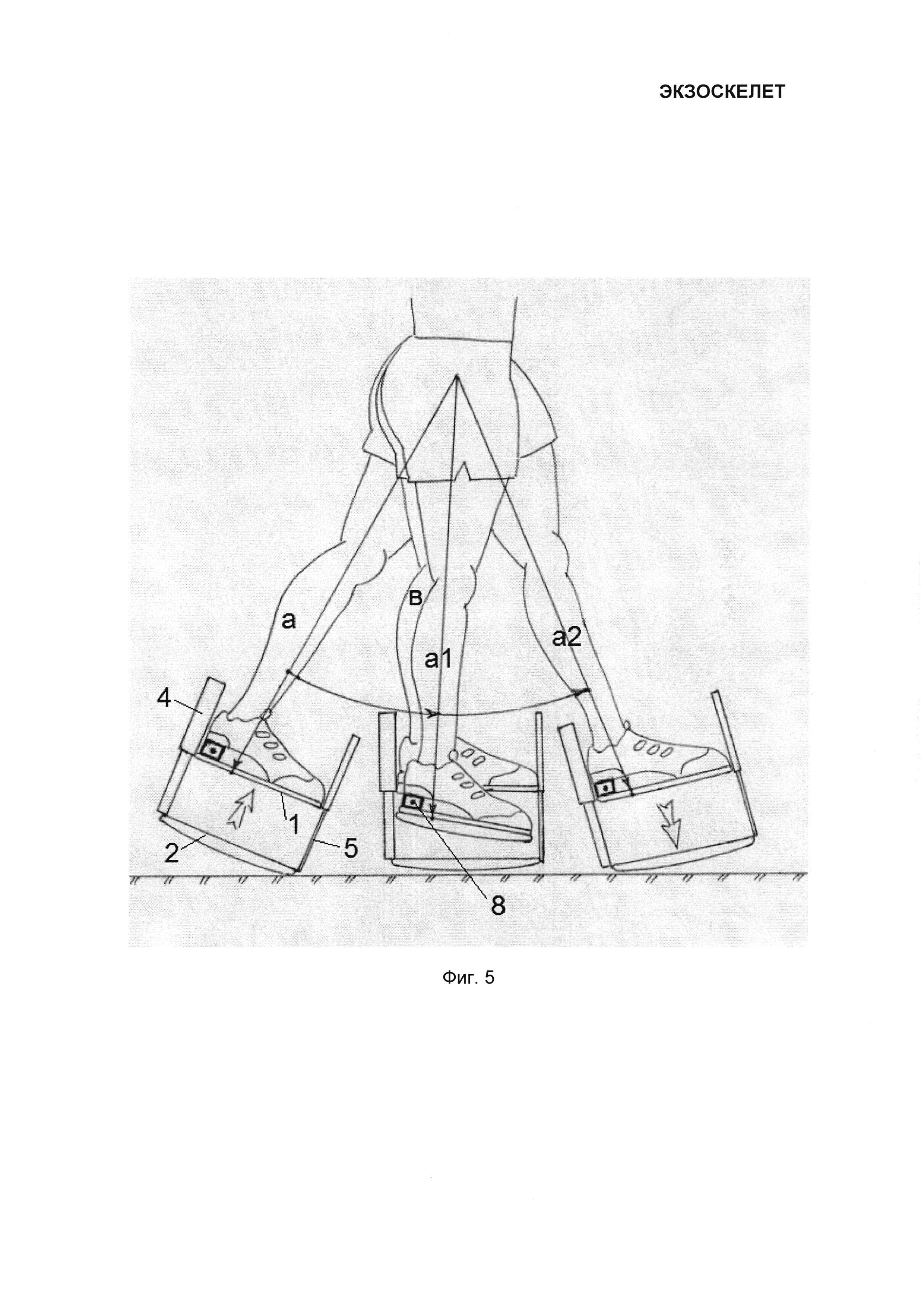
На фиг. 5 показан перенос маховой ноги с прямым коленом из крайнего заднего положения в крайнее переднее положение с выравниванием траектории движения ОЦМ при движении по ровной поверхности.
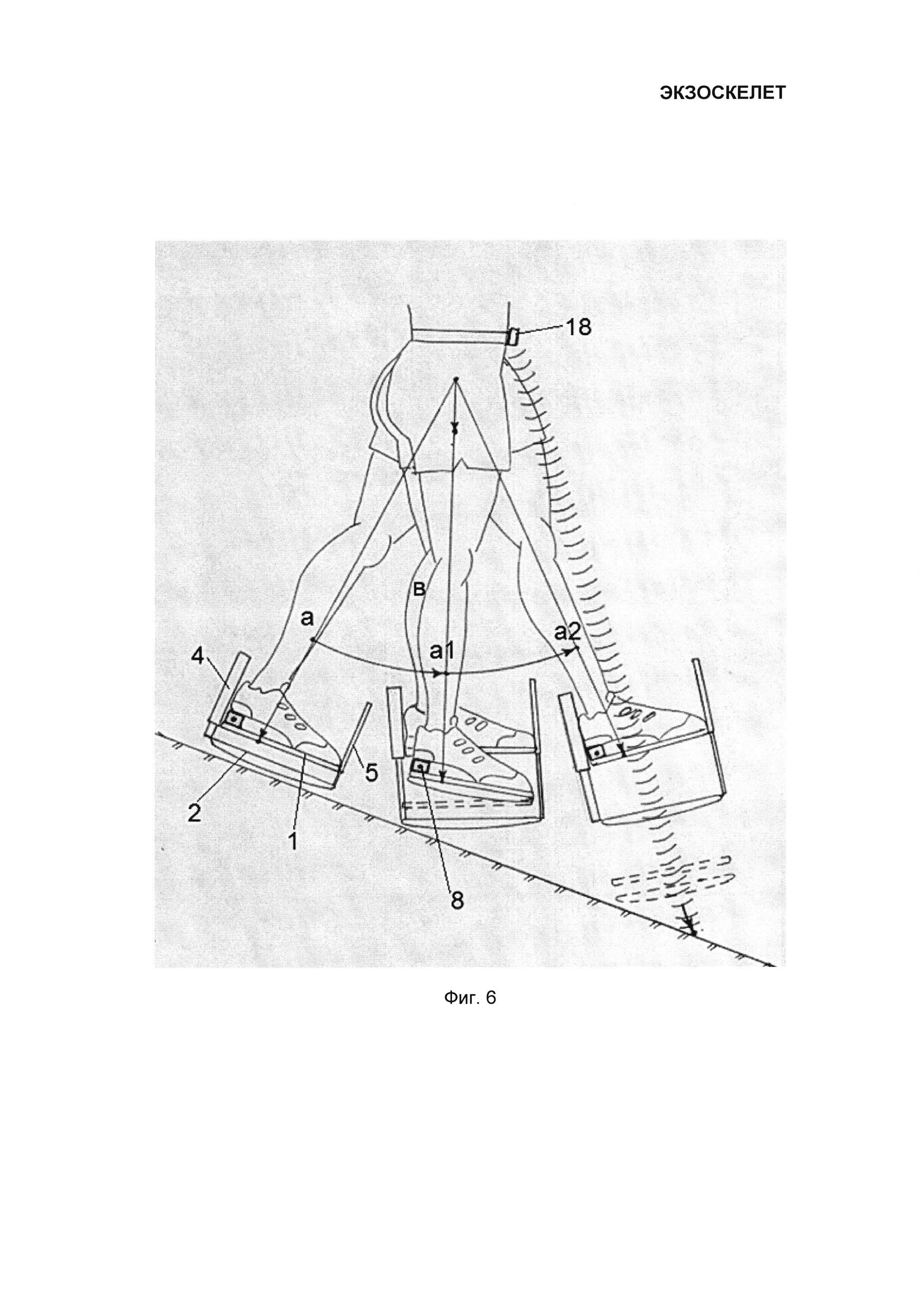
На фиг. 6 показан перенос маховой ноги с прямым коленом из крайнего заднего положения в крайнее переднее положение с выравниванием траектории движения ОЦМ при движении с горы.
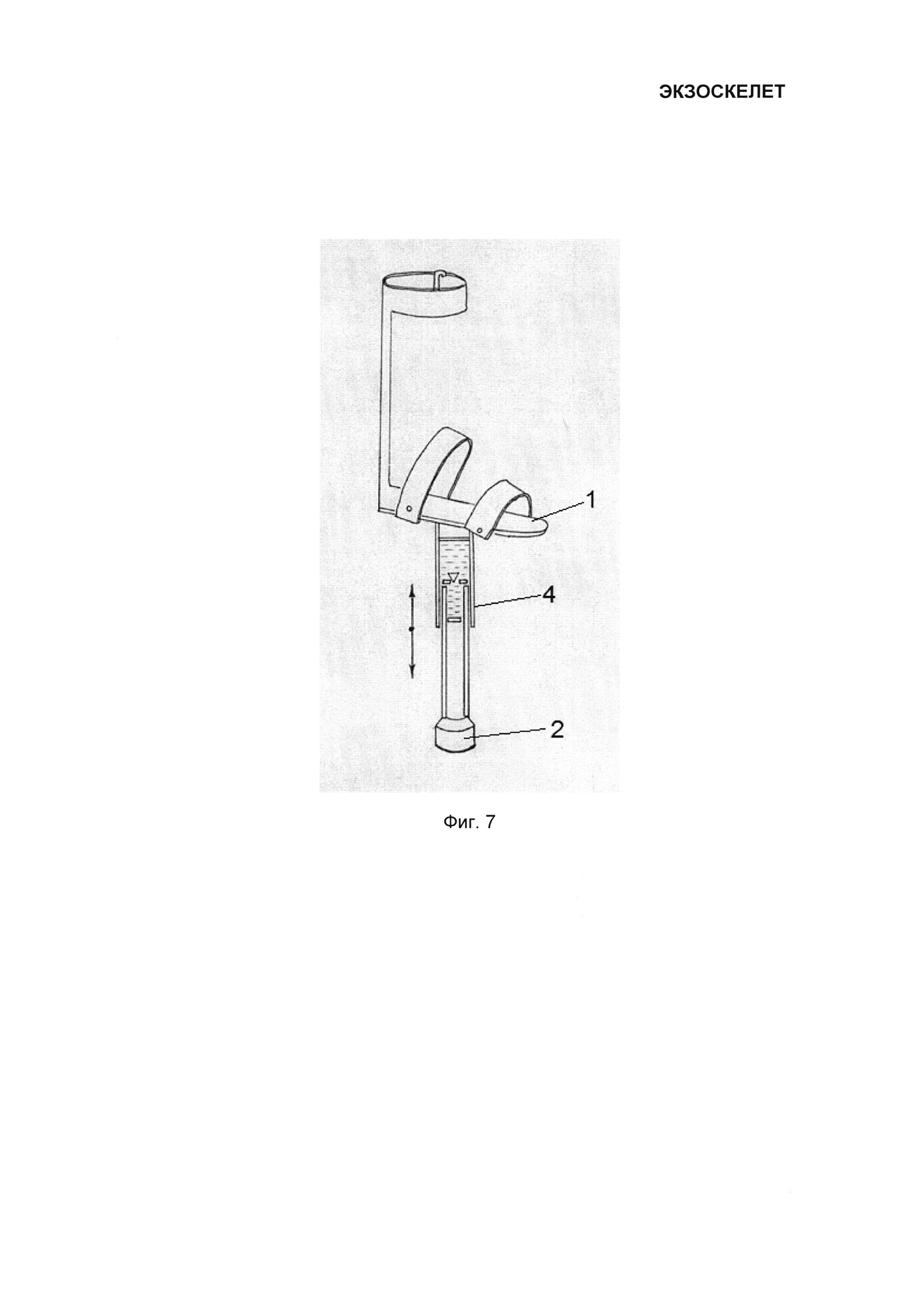
На фиг. 7 показан применение экзоскелета для ходьбы на ходулях.
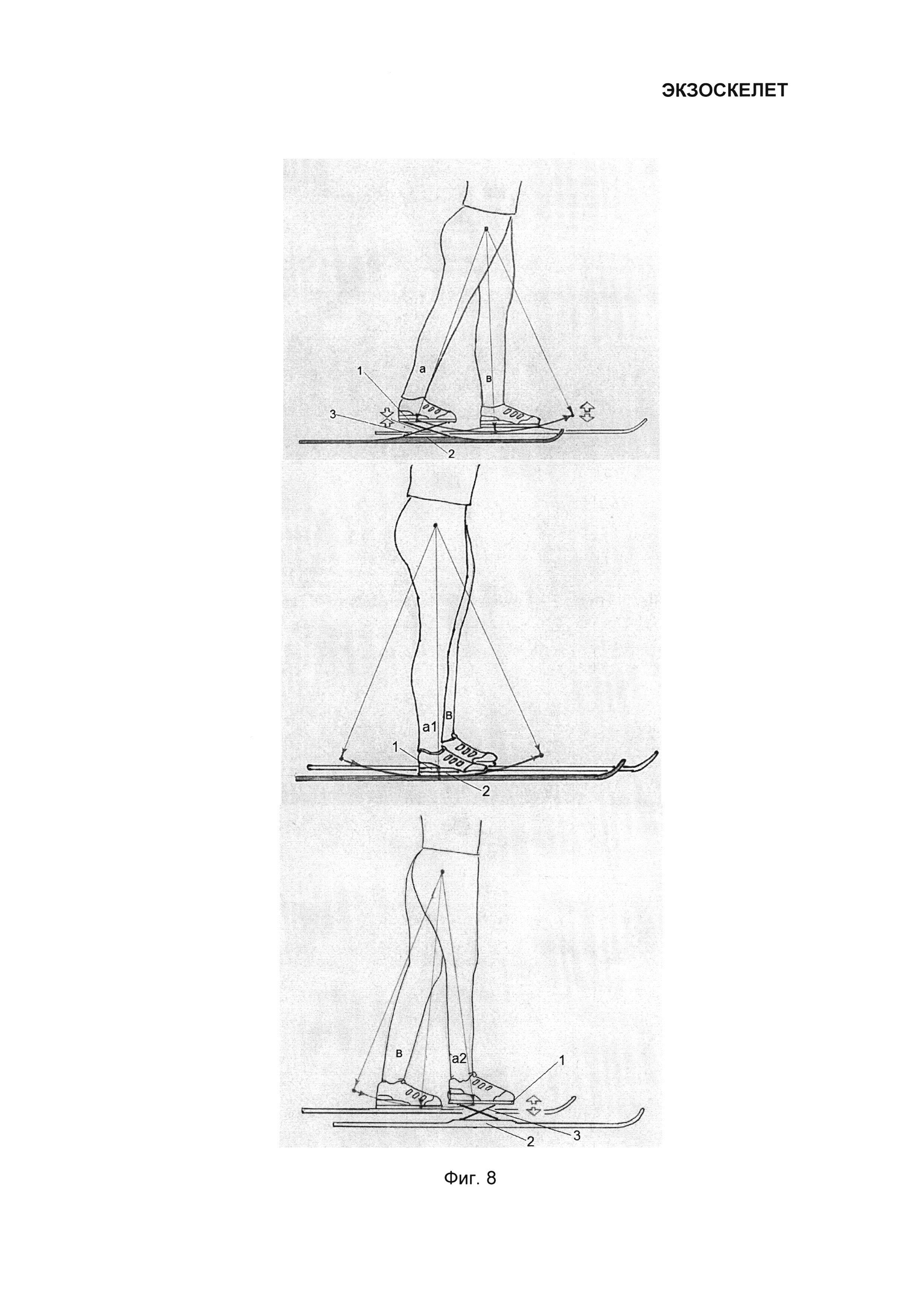
На фиг. 8 показан применение экзоскелета для лыжного спорта.
Экзоскелет содержит верхнее опорное устройство 1, закрепляемое на подошве обуви или стопе ноги, нижнее опорное устройство 2, при этом верхнее опорное устройство 1 соединено с нижним опорным устройством 2 посредством устройства 3, имеющего возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств 1 и 2 в сжатом и раздвинутом положении (фиг. 3).
Устройство 3, имеющее возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств 1 и 2 в сжатом и раздвинутом положениях может представлять собой конструкцию, содержащую гидравлический цилиндр опорных устройств 4, расположенный преимущественно вертикально в задней части экзоскелета (в области пятки), направляющую 5, имеющую жесткость и расположенную преимущественно вертикально в передней части экзоскелета (в области носка ноги), прижимной рычаг 6, расположенный между опорными устройствами 1 и 2, фиксатор прижимного рычага 7 и электронно-измерительный блок 8, расположенные на верхнем опорном устройстве 1.
Один конец прижимного рычага 6, расположенный на нижнем опорном устройстве 2, представляет собой шарнирно-подвижную опору, имеющую горизонтальное перемещение. Второй конец прижимного рычага 6 закреплен на верхнем опорном устройстве 1 с возможностью вращения вокруг поперечной оси.
Под направляющей 5, имеющей жесткость, понимается устройство в форме трубки, стержня, пластины и т.д., состоящее из двух частей, где одна из частей может выдвигаться параллельно второй его части (http://konstruirovanie-mashin.ru/glava-konstruirovanie-kharakternykh-uzlov-mekhanizmov/napravlyayushchie)
Гидравлический цилиндр опорных устройств 4 соединен с гидравлическим цилиндром прижимного механизма 9, соединенным с фиксатором прижимного механизма 10 и одним из концов пружины прижимного механизма 11, другой конец которой соединен с концом прижимного рычага 6, расположенным на верхнем опорном устройстве 1, и фиксатором прижимного рычага 7 (фиг. 3).
Гидравлический цилиндр прижимного механизма 9 содержит внешний корпус 12, внутренний корпус 13, механический клапан 14, электрический клапан 15, пружину механического клапана 16, прокладку 17 (фиг. 4).
Электронно-измерительный блок 8 состоит из полнофункционального трехосевого акселерометра ADXL335, микроконтроллера ATmega2560, детектора сигнала беспроводной сети Wi-Fi или Bluetooth.
Также устройство 3 может быть реализовано посредством использования любых технических решений, основанных на известных существующих принципах (механическом, гидравлическом, пневмо-гидравлическом и других, включая комбинированные), которые позволяют сжимать и раздвигать опорные устройства 1 и 2 в вертикальной плоскости с их фиксацией в сжатом и раздвинутом положениях. При этом подобные технические решения могут иметь как внешнее расположение относительно опорных устройств 1 и 2 (как показано на фиг. 3), так и быть расположенными между ними.
Принцип движения с использованием экзоскелета по ровной поверхности приведен на фиг. 5 (показан один из вариантов реализации решения, когда экзоскелет закреплен на подошве обуви). При начале движения у опорной (позиция в на фиг. 5) и маховой ноги (крайнее заднее положение в позиции а на фиг. 5) нижнее опорное устройство 2 экзоскелета раздвинуто от верхнего опорного устройства 1 на расстояние 8-15 см, которое фиксируется механическим клапаном 14. Когда давление массы тела человека полностью переносится на опорную ногу (позиция в на фиг. 5), на верхнее опорное устройство 1 маховой ноги (позиция а1 на фиг. 5) давит только вес самой маховой ноги. В зависимости от массы тела человека пружина механического клапана 16 открывает механический клапан 14 и дает возможность от давления сработать пружине 11 и прижимному рычагу 6 и прижать нижнее опорное устройство 2 к верхнему 1. Освобожденная от опоры, расслабленная и выпрямленная в колене маховая нога из крайнего заднего положения (позиция а на фиг. 5), не соприкасаясь с поверхностью земли, совершает маятниковое движение вперед на длину шага в крайнее переднее положение (позиция а2 на фиг. 5). В этом положении по сигналу трехосевого акселерометра и импульсу микроконтроллера из электронно-измерительного блока 8 фиксатор прижимного механизма 10 освобождает пружину прижимного механизма 11 и дает возможность нижнему опорному устройству 2 под собственным весом опуститься на землю. В момент, когда маховая нога переходит в опорную, и давление на верхнее опорное устройство 1 превышает вес маховой ноги, от давления гидравлической жидкости механический клапан 14 сжимает пружину механического клапана 16 зафиксировав верхнее 1 и нижнее 2 опорные устройства в разведенном состоянии. При дальнейшем переносе веса на ногу, когда давление в гидравлическом цилиндре опорных устройств 4 достигает 50-80% массы тела, гидравлическая жидкость переходит в гидравлический цилиндр прижимного механизма 9, который сжимает пружину прижимного механизма 11, способную прижать нижнее опорное устройство 2 весом 150-200 г для нового цикла.
Таким образом, маховая нога завершает свое свободное маятниковое движение и становится опорной ногой, расположенной на возвышении относительно линии земли на 8-15 см. Затем рассмотренный цикл повторяется для той ноги, которая из маховой стала опорной.
В итоге, маховая нога при использовании заявляемого экзоскелета опускается ниже линии опоры опорной ноги (уровень верхнего опорного устройства 1 при раздвинутом положении опорных устройств 1 и 2) в отличие от обыкновенной походки, отклонив вниз тазобедренный сустав на 6-7 см, что компенсирует и выравнивает траекторию движения ОЦМ. При таком свободном маятниковом движении ног энергия затрачивается только на сопротивление силы трения в отличие от обычной ходьбы.
Данный экзоскелет может работать также в пассивном режиме при спуске с горы. Так, при спуске с горы обычным шагом опорная нога несет большую нагрузку, совершая приседания, при вертикальном снижении. Согласно заявляемому изобретению, для спуска с горы необходимо определить изменение горизонтального уровня точки переноса маховой ноги. На фиг. 6 приведен пример, где изменение уровня определяет закрепленный на поясе лазерный дальномер 18 с источником питания, который, определив изменение расстояния, посредством проводного соединения или беспроводной технологии передает сигнал для открытия электрического клапана 15. При спуске, в момент когда маховая нога в движении сравнивается (позиция а1 на фиг. 6) с опорной (позиция в на фиг. 6) и продолжает движение в крайнее переднее положение (позиция а2 на фиг. 6) открытый электрический клапан 15 дает возможность телу человека плавно опуститься на необходимую величину, оставив небольшое расстояние между верхним 1 и нижним 2 опорными устройствами, необходимое для начала нового движения вперед маховой ноги из крайнего заднего положения (позиция а на фиг. 6).
Если на нижнее опорное устройство 2 подать энергию, способную при раздвижении опорных устройств 1 и 2 приподнимать тело человека, данная конструкция может работать по принципу аналогичному спуске с горы как активный экзоскелет с возможностью подниматься в гору или по лестнице.
При использовании конструкции экзоскелета для ходьбы на ходулях верхнее опорное устройство 1 представляет собой платформу, которая закрепляется на подошве обуви, а нижнее опорное устройство 2 представляет собой наконечник ножки ходули, который контактирует с земной поверхностью. При этом гидравлический цилиндр опорных устройств 4 располагаются в ножках ходулей (фиг. 7). Процесс перемещения маховой ноги в данном случае совпадает с процессом перемещением маховой ноги согласно фиг. 5.
Предложенная конструкция экзоскелета может быть использована для крепления на лыжи. При этом верхнее опорное устройство 1 представляет собой платформу, которая закрепляется на подошве обуви, а нижнее опорное устройство может являться частью лыжного крепления (фиг. 8). Процесс перемещения маховой ноги в данном случае совпадает с процессом перемещением маховой ноги согласно фиг. 5. На указанно фигуре показан вариант, согласно которому опорные устройства 1 и 2 имеют шарнирно неподвижное крепление, а устройство 3, имеющее возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств 1 и 2 в сжатом и раздвинутом положении, имеет шарнирно подвижное крепление с фиксаторами положения в виде зубчатых храповиков.
Предложенная конструкция пассивного экзоскелета имеет простую, легкую по весу и эффективную конструкцию, что дает следующие преимущества при ходьбе:
1. Значительно уменьшает нагрузку на большую группу мышц ног.
2. Снижает нагрузка и давление на голеностопный и тазобедренный суставы.
3. Обеспечивает возможность сделать устройство недорогим - ниже минимальной категории 1000-10000 $, что делает ее общедоступной.
4. Может быть использована как для здоровых людей при занятии туризмом и спортом, так и для пациентов с нарушением или слабостью мышц и суставов и пожилых людей.
5. При использовании и управлении не задействует руки.
6. Не ограничивает движение тела, таза и ног в пространстве (имеет три степени свободы).
7. Является устойчивой.
8. Экзоскелет может быть выполнен как встроенным в обувь, так и выполнен в виде съемной конструкции, позволяющей его легко одевать и снимать. Данная конструкция может быть использована в креплениях беговых лыж (фиг. 8) и конструкции ходулей (фиг. 7).
9. Может комбинированно сочетаться с активными экзоскелетами, для помощи переноса ноги вперед, что при незначительных затратах энергии сведет усилия при ходьбе до минимума, (http://www.automotive.com/news/honda-debuts-walking-assist-device-version-two-6870/)
10. Универсальность размера (целесообразно в зависимости от метрики человека применить один или несколько базовых вариантов, не требуя подгонки под каждого индивидуально).
11. Не нуждается в обучении и привыкании к пользованию.
12. Может быть использована на пересеченной поверхности (грунт, лестницы, бордюры, и т.д.) в отличие от колесной конструкции.
13. При одинаковой нагрузке - количестве потраченной энергии - значительно увеличивается пройденное расстояние при использовании в пеших походах.
14. Может быть быстро и легко отключена без снимания с обуви при наличии замка с щеколдой 19 на верхнем опорном устройстве 1 (см. фиг. 3), позволяющем зафиксировать прижатое положение нижнего опорного устройства 2 для прохождения сложных участков, лестниц и других случаях. При этом толщина подошвы имеет обычные размеры для ходьбы шагом привычной длины.
Таким образом, заявляемая конструкция экзоскелета является удобной и универсальной в применении.
Экзоскелет, характеризующийся тем, что содержит верхнее и нижнее опорные устройства, расположенные под стопой человека и соединенные между собой посредством устройства, имеющего возможность сжатия и раздвижения в вертикальной плоскости с фиксацией положения опорных устройств в сжатом или раздвинутом положениях, которое выполнено в виде шарнирно-подвижной опоры, соединенной одним концом с нижним опорным устройством с возможностью перемещения и закрепленной другим концом на верхнем опорном устройстве с возможностью вращения вокруг поперечной оси, при этом нижнее опорное устройство выполнено с возможностью выдвижения в вертикальной плоскости относительно верхнего опорного устройства, при переносе ноги из крайнего заднего положения в крайнее переднее.
Система тормозной стабилизации
Система тормозной стабилизации

