Результат интеллектуальной деятельности: АКТИВНЫЙ РЕГУЛЯТОР ПОДАЧИ ДОЛОТА
Вид РИД
Изобретение
Изобретение относится к бурению нефтяных и газовых скважин гидравлическими забойными двигателями, а именно к способам контроля осевой нагрузки на долото и режима работы гидравлических забойных двигателей. Техническим результатом является повышение эффективности бурения скважин путем оперативного регулирования осевой нагрузки на долото и изменения режимов работы гидравлических забойных двигателей используя их выходные параметры - мощность, момент, частоту вращения. Изобретение включает замеры показаний веса колонны бурильных труб над забоем и с нагрузкой на долото, поддержание заданной разницы измеренных значений, корректировку осевой нагрузки на долото путем измерения давления в манифольде при работе гидравлического забойного двигателя и сравнения давления с заданным значением из стендовой характеристики (или по паспортным данным). При этом определяется необходимый перепад давления на гидравлическом забойном двигателе из его стендовой характеристики (или по паспортным значениям), которая заложена в систему управления, в зависимости от величины регулируемого выходного параметра гидравлического забойного двигателя - мощности, момента или частоты вращения. Определяется сумма перепада давления в рабочем режиме (в зависимости от величины выбранного выходного параметра) и перепада давления на гидравлическом забойном двигателе в режиме холостого хода как задание давления в манифольде. Задание давления в манифольде сравнивается с фактическим давлением, а их разность является сигналом коррекции осевой нагрузки на долото.
Известна система автоматического управления процессом бурения (патент РФ №2041348, дата публикации 09.08.1995) содержащая датчик механической скорости, датчик осевой нагрузки, экстремальный регулятор и блок преобразования координат. При этом входы блока преобразования координат соединены с датчиком механической скорости и осевой нагрузки, выход соединен с входом экстремального регулятора. Система позволяет преобразовать не экстремальный объект в экстремальный и обеспечить тем самым автоматический поиск режима бурения по осевой нагрузке.
Известен способ регулирования электропривода регулятора подачи долота (патент РФ №2108456, дата публикации 10.04.1998). В способе после задания нагрузки на долото преобразуют его в цифровую форму в аналого-цифровом преобразователе микропроцессорного комплекса (МПК). Задают в МПК скорость подачи долота. После растормаживания колонны бурильных труб и измерения тока двигателя преобразуют текущее значение тока двигателя в цифровую форму в аналого-цифровом преобразователе (АЦП). Определяют статический ток двигателя в МПК. Фиксируют статический ток двигателя в МПК, запоминая тем самым вес колонны до соприкосновения долота с забоем. Перечисленные выше операции повторяют при каждом разбуривании скважины на длину очередной пристыкованной к колонне трубы. Затем тестируют электропривод регулятора подачи долота. После соприкосновения долота с забоем вновь ток двигателя, измеренный датчиком тока, преобразуют в цифровую форму в АЦП. Определяют в МПК статический ток двигателя. Определяют нагрузку на долото в МПК и определяют в нем ошибку по нагрузке на долото. Обрабатывают ее, определяя сигнал задания на скорость двигателя. После измерения скорости двигателя преобразуют текущее значение двигателя в цифровую форму. Определяют в МПК ошибку по скорости двигателя, обрабатывают ее, определяя сигнал задания на ток. Определяют в МПК ошибку по току двигателя, обрабатывают ее, определяя управляющее воздействие на преобразователь. Выдают его в порт ввода-вывода МПК, преобразуют в аналоговую форму в АЦП и подают преобразованное управляющее воздействие на преобразователь, питающий двигатель.
Известна система автоматического управления процессом бурения, содержащая объект регулирования (буровой станок), датчики осевой нагрузки, скорости бурения, крутящего момента, управляющий блок адаптации, основное управляющее устройство, датчик сигнала по крутящему моменту, схему сравнения и исполнительную схему по частоте вращения (Авторское свидетельство СССР N 739219, кл. Е21В 45/00,1980).
Общим недостатком указанных технических решений является то, что при бурении наклонных и горизонтальных скважин фактическая осевая нагрузка на долото не будет равна измеренным значениям с использованием наземного оборудования потому, что часть веса колонны бурильных труб воспринимается стенками скважины.
Известен способ контроля осевой нагрузки на долото при бурении горизонтальных и наклонно-направленных скважин винтовым забойным двигателем (патент РФ №2361055, дата публикации 10.07.2009) включающий определение давления на стояке буровой установки в холостом режиме работы винтового забойного двигателя (долото над забоем), создание необходимой нагрузки на долото разгруженным весом бурильной колонны на забой, определяемой по станции геолого-технических исследований (ГТИ), до тех пор, пока давление на стояке не вырастет на величину разницы давлений в рабочем и холостом режимах работы двигателя, определенных по его характеристике, после запуска винтового забойного двигателя (над забоем), при работе его в режиме холостого хода производят проворачивание бурильной колонны с последующим замером величины момента на роторе в режиме работы двигателя на холостом ходу, после этого создают осевую нагрузку на долото и производят проворачивание бурильной колонны с последующим замером величины момента на роторе - момент на роторе в рабочем режиме работы двигателя, при этом фактическую осевую нагрузку на долото определяют по математической формуле. Недостатком способа является большое количество ручных измерений и расчетов, а также отсутствие автоматического регулирования подачи долота.
Наиболее близким по технической сути и достигаемым результатам является способ контроля режима работы гидравлического забойного двигателя в забойных условиях (патент РФ №2508447, дата публикации 27.02.2014) включающий замеры показаний давления в нагнетательной линии под нагрузкой и без нагрузки на долото, поддержание постоянной разницы замеренных показаний давлений, определяют максимально допустимую величину скорости подачи долота по математической формуле, осуществляют замеры скорости подачи долота и в случае ее превышения выше максимального допустимого значения снижают ее. Недостатками способа являются, во-первых, отсутствие контроля за осевой нагрузкой на долото при бурении вертикальных участков скважины; во-вторых, отсутствие возможности раздельного регулирования выходных параметров гидравлических забойных двигателей, таких как развиваемая мощность, момент и частота вращения; в-третьих, пассивность регулирования - работа только на спуск колонны бурильных труб без осуществления приподъема колонны в случае резкого увеличения осевой нагрузки на долото.
Задачей настоящего изобретения является повышение эффективности бурения скважин путем оперативного изменения режимов работы гидравлических забойных двигателей используя их выходные параметры - мощность, момент, частоту вращения.
Технический результат достигается за счет того, что производятся замеры показаний веса колонны бурильных труб над забоем и с нагрузкой на долото, поддерживается заданная разница измеренных значений, корректировка осевой нагрузки на долото путем измерения давления в манифольде при работе гидравлического забойного двигателя и сравнения давления с заданным значением. При этом определяется необходимый перепад давления на гидравлическом забойном двигателе из его стендовой характеристики (или по паспортным значениям), которая заложена в память системы управления, в зависимости от величины регулируемого выходного параметра гидравлического забойного двигателя -мощности, момента или частоты вращения. Определяется сумма перепада давления в рабочем режиме (в зависимости от величины выбранного выходного параметра) и перепада давления на гидравлическом забойном двигателе в режиме холостого хода как задание давления в манифольде. Задание давления в манифольде сравнивается с фактическим давлением, а их разность является сигналом коррекции осевой нагрузки на долото.
Активный регулятор подачи долота содержит два контура регулирования (фиг.1) - первый контур регулирования осевой нагрузки на долото и второй контур регулирования давления в манифольде.
Первый контур регулирования осевой нагрузки на долото содержит датчик веса 1, установленный на неподвижном конце талевого каната и блок фиксации веса колонны бурильных труб 2, выходные сигналы которых сравниваются в первом сумматоре 1. Во втором сумматоре 2 сравниваются выходной сигнал первого сумматора 1 и сигнал блока задания осевой нагрузки на долото 5, выходной сигнал которого поступает в пропорционально-интегральный регулятор осевой нагрузки на долото 6, формирующий корректирующее воздействие в сигнал задания скорости бурения (спуска колонны бурильных труб). Блоком задания скорости бурения 7 устанавливается максимальная скорость бурения, выходной сигнал которого складывается в третьем сумматоре 3 с выходным сигналом регулятора 6. Выходной сигнал третьего сумматора 3 поступает в систему автоматического управления преобразователя частоты 8, который управляет электродвигателем 9 аварийного (вспомогательного) привода буровой лебедки.
Второй контур регулирования давления в манифольде содержит блок 10 задания зависимости мощности, момента и частоты вращения от перепада давления на гидравлическом забойном двигателе из стендовой характеристики (или по паспортным данным гидравлического забойного двигателя), на первый вход которого поступает сигнал от блока выбора типа гидравлического забойного двигателя 11, на второй вход поступает сигнал от блока выбора регулируемого параметра 12, на третий вход поступает сигнал от блока задания величины регулируемого параметра 13. Блок 10 содержит зависимости мощности, момента и частоты вращения от перепада давления на различных гидравлических забойных двигателях из стендовых характеристик(или по паспортным данным гидравлических забойных двигателей), выходной сигнал которого складывается в четвертом сумматоре 4 с сигналом от блока фиксации давления в манифольде при работе гидравлического забойного двигателя на холостом ходу 4. Сигнал от датчика давления 3 сравнивается в пятом сумматоре 5 с выходным сигналом четвертого сумматора 4, выход которого поступает на пропорционально-интегральный регулятор давления в манифольде 14, выходной сигнал которого является сигналом коррекции осевой нагрузки на долото и поступает на третий вход третьего сумматора 3.
Активный регулятор подачи долота работает следующим образом.
Осуществляется спуск компоновки низа бурильной колонны и, не доходя до забоя производится взвешивание колонны бурильных труб. Сигнал о весе колонны бурильных труб поступает от датчика веса 1, установленного на неподвижном конце талевого каната. Вес колонны бурильных труб запоминается в блоке фиксации веса колонны бурильных труб 2. Запускают буровой насос и гидравлический забойный двигатель без нагрузки; фиксируется давление в манифольде при работе гидравлического забойного двигателя на холостом ходу. Сигнал о давлении в манифольде поступает од датчика давления 3. Давление в манифольде при работе гидравлического забойного двигателя на холостом ходу запоминается в блоке фиксации давления в манифольде при работе гидравлического забойного двигателя на холостом ходу 4. Спускают компоновку низа бурильной колонны до забоя плавно создавая нагрузку на долото.
Сигнал о весе колонны бурильных труб с блока фиксации веса колонны бурильных труб2 сравнивается в первом сумматоре 1 с сигналом от датчика веса 1. Выходной сигнал первого сумматора 1 является сигналом, пропорциональным осевой нагрузке на долото.
В блок задания осевой нагрузки на долото 5 бурильщиком вводится необходимое значение осевой нагрузки на долото, выходной сигнал которого поступает на второй сумматор 2. На второй вход второго сумматора 2 поступает сигнал об осевой нагрузке на долото от первого сумматора 1. Выходной сигнал второго сумматора 2, являющийся сигналом ошибки регулирования, в зависимости от нагрузки на долото, может быть, как положительным, так и отрицательным, поступает на вход пропорционально-интегрального регулятора осевой нагрузки на долото 6, выходной сигнал которого поступает на вход третьего сумматора 3. На второй вход третьего сумматора 3 поступает сигнал от блока задания скорости бурения 7 (сигнал скорости спуска бурильной колонны в процессе бурения). Выходной сигнал третьего сумматора 3 является управляющим сигналом задания скорости, поступающий в систему автоматического управления преобразователя частоты 8, который управляет электродвигателем 9 аварийного (вспомогательного) привода буровой лебедки.
В случае положительного выходного сигнала второго сумматора 2 - значение нагрузки на долото меньше заданного - сигнал будет восприниматься как задание на увеличение скорости спуска колонны бурильных труб в процессе бурения, а в случае отрицательного сигнала - значение нагрузки на долото больше заданного -сигнал будет восприниматься как задание на снижение скорости спуска колонны бурильных труб в процессе бурения вплоть до ее приподъема до тех пор, пока нагрузка не станет равна заданию.
В случае наклонно-направленного бурения и бурения горизонтальных скважин фактическая осевая нагрузка на долото не будет равна выходному сигналу первого сумматора 1 потому, что часть веса колонны бурильных труб воспринимается стенками скважины. Для более точного регулирования осевой нагрузки на долото вводится контур регулирования перепада давления на гидравлическом забойном двигателе. Блок 10 содержит зависимости мощности, момента и частоты вращения от перепада давления на гидравлических забойных двигателях из стендовых характеристик (или по паспортным данным гидравлических забойных двигателей). Указанные зависимости вносятся в блок 10 для различных типов гидравлических забойных двигателей, используемых при бурении. Выбор типа гидравлического забойного двигателя осуществляется блоком выбора типа гидравлического забойного двигателя 11, выбор регулируемого параметра - мощности, момента или частоты вращения - осуществляется блоком выбора регулируемого параметра 12, а величина регулируемого параметра задается блоком задания величины регулируемого параметра 13. Выходной сигнал блока регулирования выходных параметров гидравлических забойных двигателей 10 является сигналом задания перепада давления на гидравлическом забойном двигателе, поступает на четвертый сумматор 4, где складывается с сигналом давления в манифольде при работе гидравлического забойного двигателя на холостом ходу. Выходной сигнал четвертого сумматора 4 является сигналом задания давления в манифольде, который сравнивается в пятом сумматоре 5 с сигналом фактического давления в манифольде от датчика давления 3. Выходной сигнал пятого сумматора 5, являющийся сигналом ошибки регулирования давления, в зависимости от фактической нагрузки на долото, может быть, как положительным, так и отрицательным, поступает на вход пропорционально-интегрального регулятора давления в манифольде 14, выходной сигнал которого поступает на вход третьего сумматора 3 и является сигналом коррекции осевой нагрузки на долото.
При необходимости блоком 10 может задаваться необходимое давление без учета стендовых характеристик или паспортных данных гидравлических забойных двигателей, при этом обнуляются выходные значения блоков 11, 12 и 13, а в блок 10 вручную вводится задание перепада давления на гидравлическом забойном двигателе. Предлагаемый активный регулятор подачи долота может использоваться для контроля режима бурения, как для винтовых забойных двигателей, так и турбобуров.
В случае отрицательного выходного сигнала пятого сумматора 5 - фактическое значение давления в манифольде меньше заданного - сигнал будет восприниматься как задание на увеличение скорости спуска колонны бурильных труб, а в случае положительного сигнала - фактическое значение давления в манифольде больше заданного -сигнал будет восприниматься как задание на снижение скорости спуска колонны бурильных труб вплоть до ее приподъема.
Пропорционально-интегральные регуляторы 6 и 14 предназначены для выработки управляющего воздействия на объект управления пропорционально величине ошибки с учетом в данный момент времени предыдущую историю изменения входной величины.
Рассмотрим работу активного регулятора подачи долота на примере. Допустим, что вес колонны бурильных труб непосредственно перед забоем составил 60 т. Это значение запоминается в блоке фиксации веса колонны бурильных труб 2. Бурильщиком задается значение осевой нагрузки на долото, например, 10 т, в блоке задания осевой нагрузки на долото 5. В блок задания скорости бурения 7 вводится начальное значение скорости бурения, например, на основании геолого-технического наряда. Спускается компоновка низа бурильной колонны до забоя плавно создавая нагрузку на долото. Выходное значение первого сумматора 1 - это фактическая осевая нагрузка на долото. Если сигнал с датчика веса 1 будет пропорционален, например, значению в 55 т, значит, что нагрузка на долото равна значению в 5 т (разность сигналов блока фиксации веса колонны бурильных труб 2 - 60 т и датчика веса 1 - 55 т). Это значение сравнивается во втором сумматоре 2 с заданным значением в блоке задания осевой нагрузки на долото 5. При этом положительный выходной сигнал второго сумматора 2 поступает на пропорционально-интегральный регулятор 6, который на своем выходе формирует положительный сигнал задания на увеличение скорости бурения (скорости спуска колонны бурильных труб) до тех пор, пока осевая нагрузка на долото не станет равна заданию. Выходной сигнал регулятора 6 складывается с сигналом задания скорости бурения блока 7 в третьем сумматоре, а его выход поступает в систему автоматического управления преобразователя частоты 8, управляющего электродвигателем 9.
Если сигнал с датчика веса 1 будет пропорционален, например, значению в 45 т, значит, что нагрузка на долото равна 15 т (разность сигналов блока фиксации веса колонны бурильных труб 2 - 60 т и датчика веса 1-45 т). Это значение сравнивается во втором сумматоре 2 с заданным значением в блоке задания осевой нагрузки на долото 5. При этом отрицательный выходной сигнал второго сумматора 2 поступает на пропорционально-интегральный регулятор 6, который на своем выходе формирует отрицательный сигнал задания на снижение скорости бурения (скорости спуска колонны бурильных труб) до тех пор, пока осевая нагрузка на долото не станет равна заданию. В случае резкого увеличения осевой нагрузки на долото регулятором 6 будет формироваться сигнал на снижение скорости бурения вплоть до приподъема колонны бурильных труб для восстановления заданной нагрузки. Такое регулирование называется активным.
Предположим, бурильщиком в блоке выбора типа гидравлического забойного двигателя 11 выбран гидравлический забойный двигатель типа Д-178.6/7.62, в блоке выбора регулируемого параметра 12 - задан параметр мощности, а в блоке задания величины регулируемого параметра 13 - задано 200 кВт. Из стендовой характеристики гидравлического забойного двигателя типа Д-178.6/7.62, заложенной в блок 10, следует, что для мощности 200 кВт соответствует перепад давления величиной 11 МПа (фиг. 2). Выходной сигнал блока регулирования выходных параметров гидравлических забойных двигателей 10 в этом случае будет формировать на своем выходе сигнал задания, пропорциональный давлению в 11 МПа. Давление в манифольде при работе гидравлического забойного двигателя на холостом ходу с блока фиксации давления в манифольде при работе гидравлического забойного двигателя на холостом ходу 4 складывается с сигналом задания перепада давления в четвертом сумматоре 4. Например давление холостого хода гидравлического двигателя на определенной глубине составило 7 МПа, тогда выходной сигнал четвертого сумматора 4 будет пропорционален давлению в 18 МПа, что и является заданием давления в манифольде на данном интервале бурения. Если, например, давление в манифольде составило 16 МПа (сигнал от датчика давления 3), то выходной сигнал пятого сумматора 5 будет отрицательным, так как фактическое значение давления в манифольде 16 МПа меньше заданного 18 МПа. Это значит, что фактическая осевая нагрузка на долоте не достаточна для создания заданного перепада давления на гидравлическом забойном двигателе. Поэтому пропорционально-интегральным регулятором 14 формируется положительный сигнал коррекции осевой нагрузки на долото, поступающий на третий вход третьего сумматора 3 и будет восприниматься как задание на увеличение скорости спуска колонны бурильных труб до тех пор, пока давление в манифольде не станет равно 18 МПа.
В том случае, когда давление в манифольде больше заданного, например, 20 МПа, то выходной сигнал пятого сумматора 5 будет положительным, так как фактическое значение давления в манифольде 20 МПа больше заданного 18 МПа. Это значит, что фактическая осевая нагрузка на долоте велика для создания заданного перепада давления на гидравлическом забойном двигателе. Пропорционально-интегральным регулятором 14 формируется отрицательный сигнал коррекции осевой нагрузки на долото, поступающий на третий вход третьего сумматора 3 и будет восприниматься как задание на снижение скорости спуска колонны бурильных труб до тех пор, пока давление в манифольде не станет равно 18 МПа. При этом на валу гидравлического забойного двигателя будет развиваться мощность в 200 кВт (фиг. 2).
Аналогично можно выбрать в качестве регулируемого параметра момент или частоту вращения.
Предложенный активный регулятора подачи долота осуществляет не только поддержание заданной осевой нагрузки на долото, но и вносит корректировки по перепаду давления на гидравлическом забойном двигателе. Это позволяет улучшить использование гидравлического забойного двигателя, исключить его режимы разгона и торможения при изменениях осевой нагрузки, регулировать любой из выходных параметров двигателя по его стендовой характеристике. Такой подход позволит улучшить качество строительства скважины и увеличить механическую скорость бурения.
Активный регулятор подачи долота, включающий замеры показаний веса колонны бурильных труб над забоем и с нагрузкой на долото, поддержание заданной разницы измеренных значений, корректировку осевой нагрузки на долото путем измерения давления в манифольде при работе гидравлического забойного двигателя на холостом ходу и под нагрузкой, отличающийся тем, что определяется необходимый перепад давления на гидравлическом забойном двигателе из его стендовой характеристики (или по паспортным значениям), которые заложены в систему управления, в зависимости от регулируемого параметра и его величины, определяется сумма необходимого перепада давления в рабочем режиме и перепада давления на гидравлическом забойном двигателе в режиме холостого хода как задание давления в манифольде, задание давления в манифольде сравнивается с фактическим давлением, а их разность является сигналом коррекции осевой нагрузки на долото, при этом в случае резкого увеличения осевой нагрузки на долото или увеличения регулируемого параметра гидравлического забойного двигателя осуществляется снижение скорости бурения вплоть до приподъема колонный бурильных труб с последующим восстановлением регулируемых величин.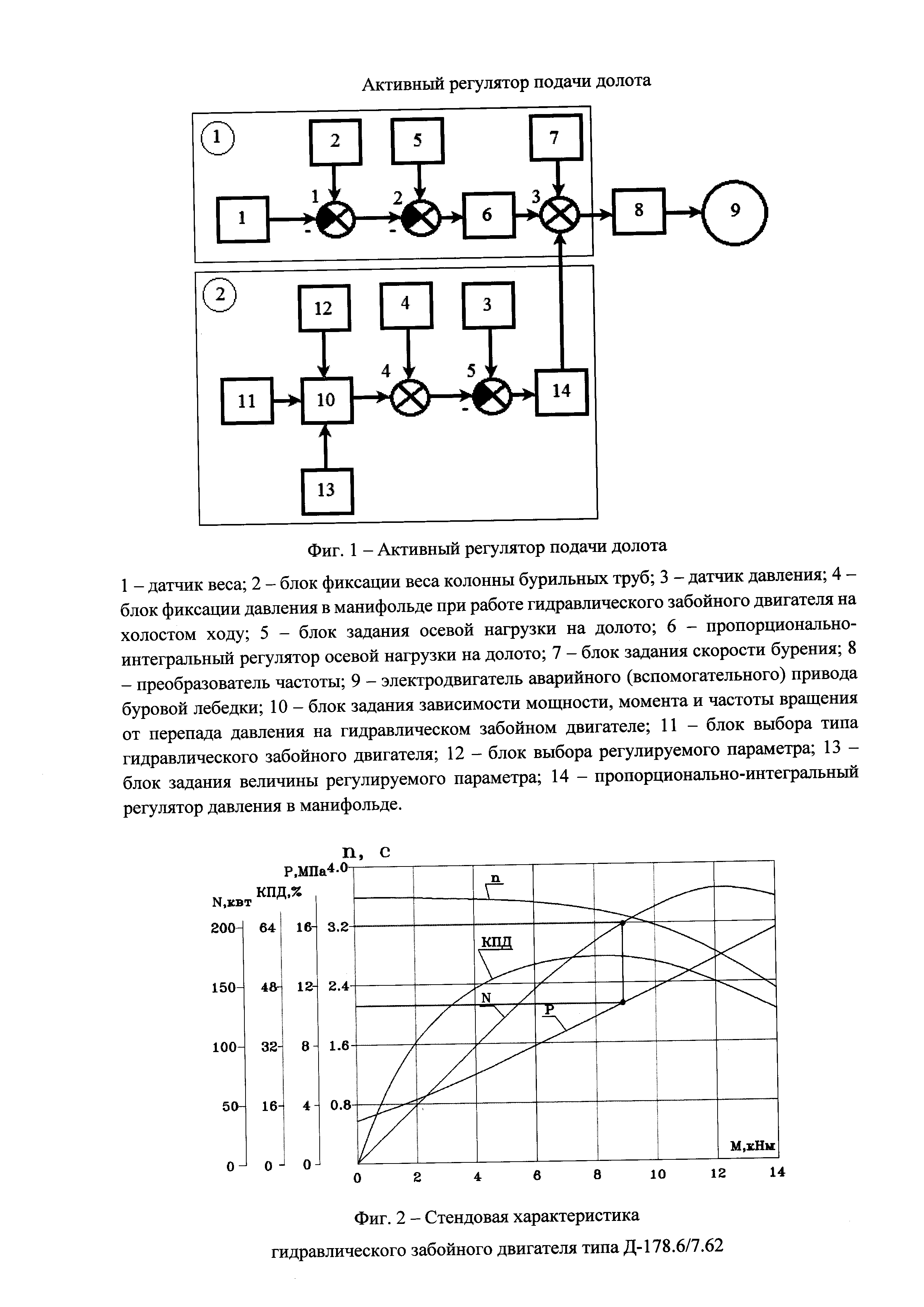
Способ бурения скважины под кондуктор при катастрофическом поглощении и устройство для его осуществления
Устройство для размагничивания бурового инструмента
Устройство для переключения обмотки возбуждения и дополнительной обмотки электродвигателя постоянного тока независимого возбуждения
Антисальниковая добавка к буровому раствору на основе глицерина
Ингибированный буровой раствор mudmax
Устройство защиты от потери питания электропривода буровой лебедки
Устройство для размагничивания бурового инструмента
Устройство для переключения обмотки возбуждения и дополнительной обмотки электродвигателя постоянного тока независимого возбуждения
Устройство защиты от потери питания на подстанциях с частотно-регулируемыми синхронными электродвигателями
Устройство переключения входных аналоговых сигналов бурового оборудования

