Результат интеллектуальной деятельности: СПОСОБ СОЗДАНИЯ НАВИГАЦИИ И СПОСОБ ОРИЕНТАЦИИ УСТРОЙСТВА НАВЕДЕНИЯ ПРИ ПОМОЩИ ЭТОЙ НАВИГАЦИИ
Вид РИД
Изобретение
Настоящее изобретение относится к созданию навигации на основе инерциальных навигационных данных и неинерциальных навигационных данных. Под «навигацией» следует понимать совокупность данных позиционирования, скорости и положения в полете носителя навигационной системы. Эту навигацию можно использовать для ориентации устройства наведения, например, для наведения оружия или для согласования одного инерциального счетчика текущих координат с другим.
Уровень техники
В вышеупомянутом первом варианте применения, то есть при ориентации линии наведения на основании навигационных данных, например, используют устройство наведения в виде гиростабилизированной оптронной сферы, установленной на носителе, таком как летательный аппарат. Оптронную сферу ориентируют при помощи двигателя, выполненного с возможностью наведения на цель и сохранения этого наведения независимо от движений аппарата-носителя, например, для применения при сопровождении цели. Таким образом, оптронную сферу ориентируют относительно аппарата-носителя, чтобы компенсировать движение аппарата-носителя.
Для этого привод оптронной сферы содержит цепь обратной связи, использующую данные положения в полете, поступающие от навигационной системы аппарата-носителя, чтобы ориентировать оптронную сферу в зависимости от положения аппарата-носителя.
Существуют два основных типа навигационных систем: чисто инерциальные навигационные системы, использующие только данные одного или нескольких инерциальных счетчиков текущих координат, и гибридные навигационные системы, использующие фильтр Калмана, объединяющий данные инерциального счетчика текущих координат и данные других датчиков (например, датчика скорости аппарата-носителя или приемника сигналов спутников геолокализации).
Чисто инерциальная навигация в меньшей степени подвержена помехам, но имеет большие погрешности, в частности, это касается углового смещения. Следовательно, использование чисто инерциальных данных для ориентации оптронной сферы приведет к смещению цели на изображении, при этом цель быстро будет уходить из поля изображения. В этом случае предусмотрено ручное управление компенсацией, которое осуществляет оператор.
Гибридная навигация является точной, но характеризуется сильными колебаниями значений во время коррекции фильтра Калмана. Таким образом, использование гибридных данных для ориентации оптронной сферы позволяет удерживать цель в центре изображения, но с постоянным перемещением визуального поля, что затрудняет работу и является утомительным для глаз оператора.
Второе вышеупомянутое применение, то есть согласование инерциальной навигации с контрольной навигацией, происходит, когда аппарат-носитель оснащен чисто инерциальной навигационной системой, являющейся контрольной, и гибридной навигационной системой. Обычно гибридную навигационную систему согласуют по контрольной навигационной системе на основании поступающих от последней чисто инерциальных навигационных данных. Действительно, коррекция гибридных навигационных данных контрольного навигационного счетчика текущих координат воспринимаются согласуемой навигационной системой как результат динамики, что мешает ее работе. Использование чисто инерциальных навигационных данных, выдаваемых контрольным навигационным счетчиком текущих координат, для согласования согласуемого навигационного счетчика текущих координат тоже не является идеальным, так как оно приводит сильному дрейфу навигационного счетчика в ходе согласования. Эти погрешности характеризуются колебанием с периодом Шулера (период равен 84 мин.). Таким образом, во всех случаях в конце согласования необходимо производить специальную коррекцию.
Кроме того, из документа FR-A-2781888 известен способ компенсации движения аппарата-носителя для радаров с синтетической антенной. В рамках этого способа комбинируют чисто инерциальную навигацию и гибридную навигацию, применяя фильтр Калмана. В этом документе данные, обычно получаемые при помощи фильтра Калмана, являются недоступными в ходе периода формирования радиолокационных изображений.
Задача изобретения
Существует потребность в разработке навигации, не имеющей перебоев, связанных с коррекциями фильтра Калмана.
Раскрытие изобретения
В связи с вышеизложенным, изобретением предложен способ выработки навигации при помощи гибридной инерциальной навигационной системы, установленной на аппарате-носителе, при этом навигационная система выполнена с возможностью вычисления первой, гибридной навигации с использованием фильтра Калмана, получающего инерциальные навигационные данные и неинерциальные навигационные данные. Способ содержит этапы, на которых:
- при помощи гибридной инерциальной навигационной системы вычисляют вторую, инерциальную навигацию на основании инерциальных навигационных данных,
- в реальном времени вычисляют отклонение между первой навигацией и второй навигацией и на этом отклонении производят фильтрацию нижних частот со временем схождения, превышающим период фильтра Калмана и меньшим периода Шулера,
- корректируют вторую навигацию при помощи фильтрованного отклонения.
Таким образом, скорректированная вторая навигация будет сочетать в себе отсутствие шума чисто инерциальной навигации (нескорректированной второй навигации) и точность гибридной навигации (первой навигации). Кроме того, вычисление отклонения между двумя навигациями осуществляют в реальном времени, поэтому скорректированная вторая навигация является доступной в любой момент. Константу времени фильтра нижних частот выбирают для каждого применения в зависимости от ожидаемого уровня точности и ожидаемого уровня шума для скорректированной второй навигации.
Объектом изобретения является также способ ориентации устройства наведения, установленного на аппарате-носителе, оснащенном гибридной инерциальной навигационной системой, которое осуществляет вышеупомянутый способ и в котором скорректированную вторую навигацию используют для ориентации устройства наведения.
Кроме того, объектом изобретения является также способ согласования первой инерциальной навигационной системы по второй гибридной инерциальной навигационной системе с применением вышеупомянутого способа, в котором первую инерциальную навигационную систему согласуют по скорректированной второй навигации.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания частных не ограничительных вариантов осуществления изобретения.
Краткое описание фигур
Описание представлено со ссылками на прилагаемые чертежи, на которых:
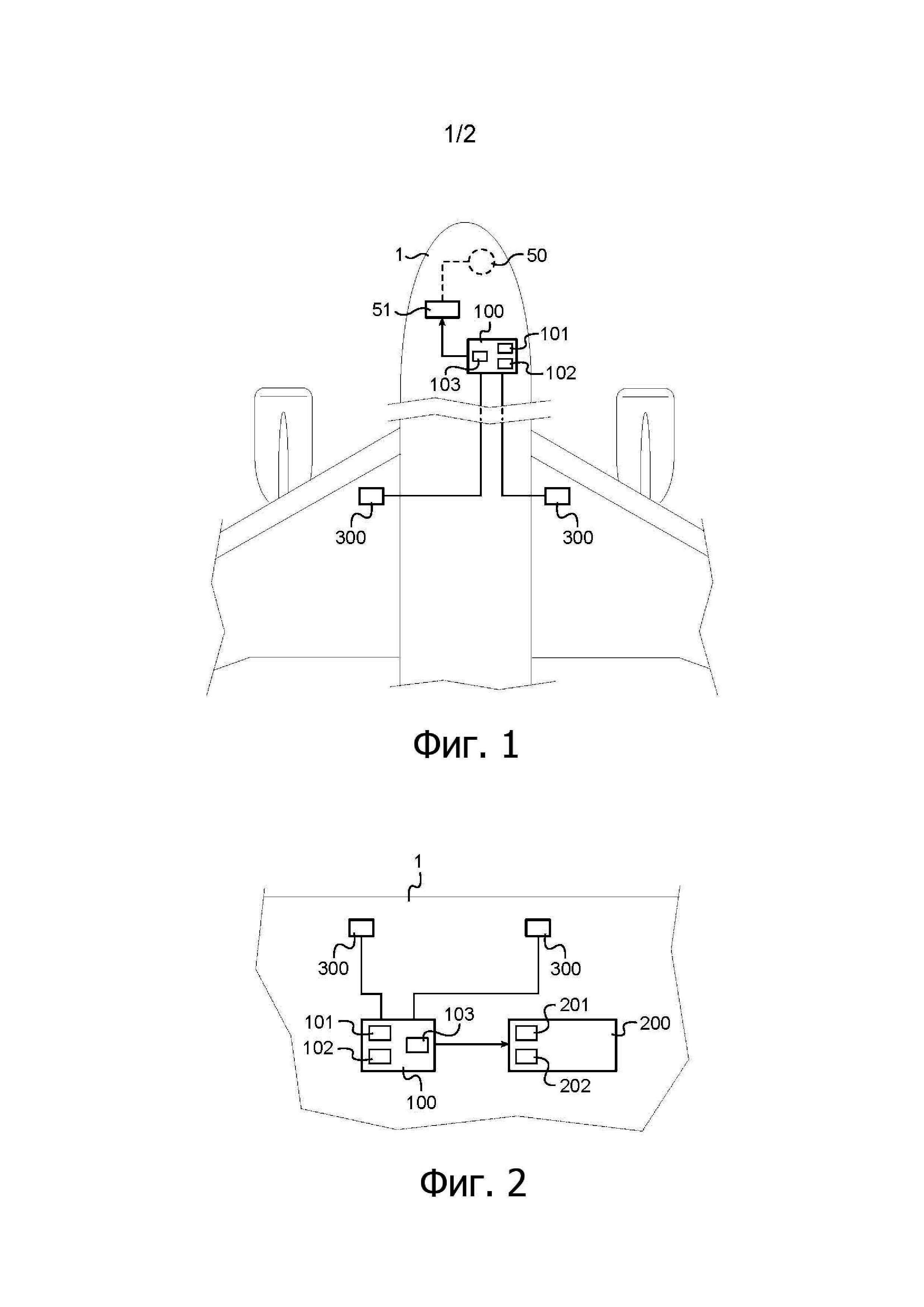
Фиг. 1 - схематичный вид аппарата-носителя, оснащенного устройством наведения для первого варианта осуществления заявленного способа.
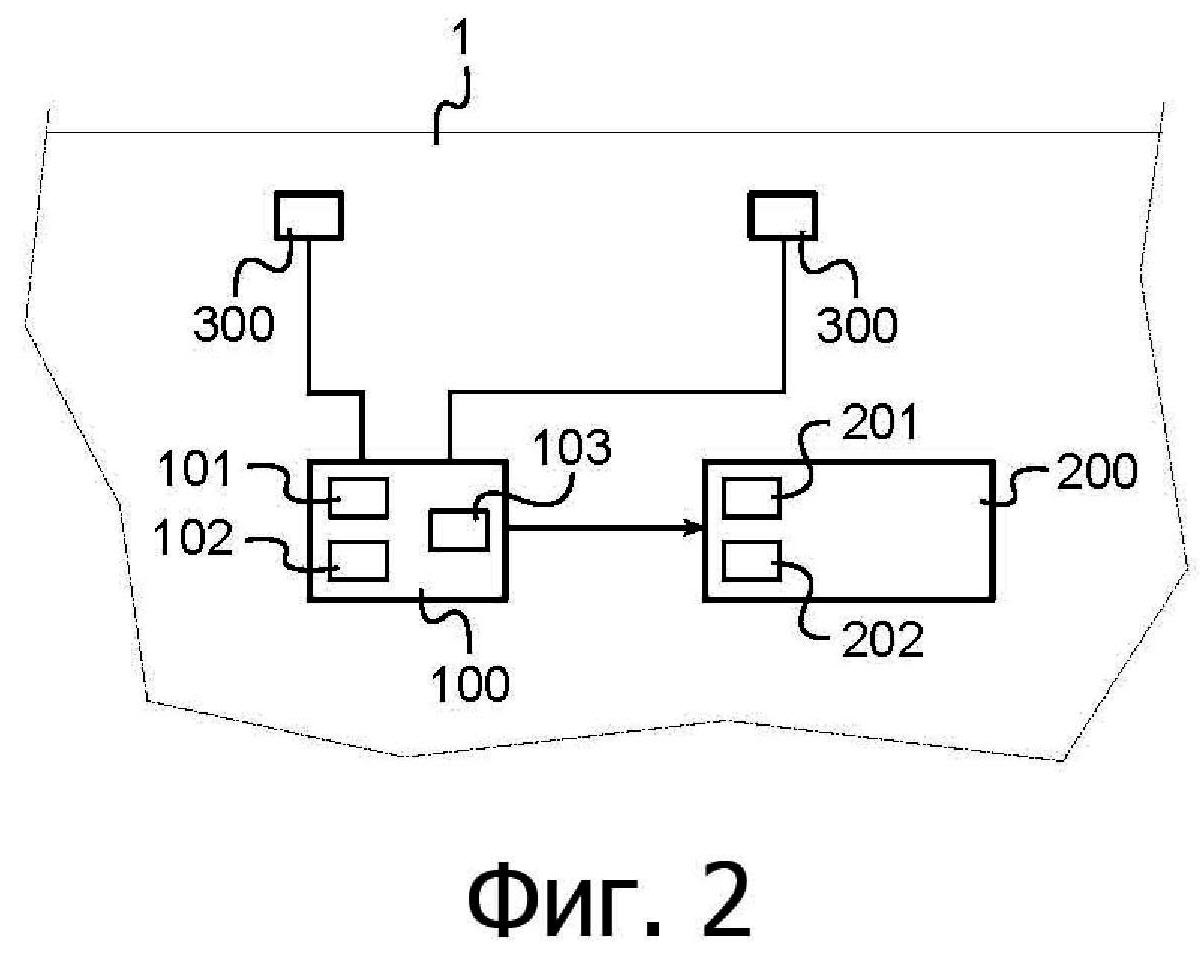
Фиг. 2 - схематичный вид аппарата-носителя, оснащенного двумя навигационными инерциальными счетчиками текущих координат для второго варианта осуществления заявленного способа.
Фиг. 3 - схема, иллюстрирующая процесс вычисления навигаций для этих двух вариантов осуществления изобретения.
Подробное описание изобретения
Далее со ссылками соответственно на фиг. 1 и 2 следует описание двух вариантов осуществления изобретения.
В первом варианте осуществления, представленном со ссылками на фиг. 1, изобретение описано в применении для летательного аппарата 1, содержащего:
- устройство наведения в виде гиростабилизированной и моторизованной оптронной сферы 50, которую необходимо ориентировать,
- первую навигационную систему 100, и
- датчики 300 навигационных данных, например, такие как приемник спутниковых сигналов геолокализации, датчик скорости, барометрический датчик высоты …
Двигатель оптронной сферы 50 соединен с устройством 51 управления, расположенным в кабине экипажа летательного аппарата и позволяющим оператору управлять ориентацией оптронной сферы 50 и просматривать изображения, снимаемые указанной оптронной сферой 50.
Навигационная система 100 является гибридной навигационной системой, содержащей блок 101 обработки, соединенный с инерциальным сердечником 102, который сам по себе известен, и с датчиками 300.
Навигационная система 100 содержит также блок 103 обработки, соединенный с блоком 101 обработки, чтобы обмениваться с ним данными.
Блоки 101 и 103 обработки соединены с блоком 51 управления, позволяющим пилоту программировать свой маршрут и обеспечивающим ему доступ к навигационным данным.
Физическая структура различных вышеупомянутых элементов сама по себе известна, и ее подробное описание опускается.
В блоке 101 обработки применен фильтр Калмана для вычисления, что само по себе известно, первой гибридной навигации N1 на основании инерциальных навигационных данных, поступающих от инерциального сердечника 102, и неинерциальных навигационных данных, поступающих от датчиков 300.
Блок 103 обработки выполнен с возможностью выдавать в устройство 51 управления скорректированную навигацию N2с, вычисление которой будет более подробно описано ниже со ссылками на фиг. 3.
Во время использования оптронной сферы 50 можно в качестве цели рассматривать зону поля, охватываемого оптронной сферой 50, и управлять двигателем оптронной сферы 50 таким образом, чтобы удерживать указанный элемент в центре охватываемого поля, независимо от маневров летательного аппарата. Устройство 51 управления запрограммировано таким образом, чтобы управлять двигателем оптронной сферы 50, используя скорректированную навигацию N2с, которую ему выдает блок 103 обработки.
Во втором варианте осуществления, представленном со ссылками на фиг. 2, изобретение описано в применении для летательного аппарата 1, содержащего:
- первую навигационную систему 100, и
- датчики 300 навигационных данных, например, такие как приемник спутниковых сигналов геолокализации, датчик скорости, барометрический датчик высоты …
- вторую навигационную систему 200, которую необходимо согласовывать.
Навигационная система 100 является гибридной навигационной системой, содержащей блок 101 обработки, соединенный с инерциальным сердечником 102, который сам по себе известен, и с датчиками 300.
Навигационная система 100 содержит также блок 103 обработки, соединенный с блоком 101 обработки.
Блоки 101 и 103 обработки соединены с второй навигационной системой 200, которая содержит блок 201 обработки, соединенный с инерциальным сердечником 202, который сам по себе известен.
Физическая структура различных вышеупомянутых элементов сама по себе известна, и ее подробное описание опускается.
В блоке 101 обработки применен фильтр Калмана для вычисления, что само по себе известно, первой гибридной навигации N1 на основании инерциальных навигационных данных, поступающих от инерциального сердечника 102, и неинерциальных навигационных данных, поступающих от датчиков 300.
Блок 103 обработки выполнен с возможностью выдавать во вторую навигационную систему 200 скорректированную навигацию N2с, вычисление которой будет более подробно описано ниже со ссылками на фиг. 3.
Навигационная система 200 использует скорректированную навигацию N2с, выдаваемую блоком обработки 103, для своего согласования с навигационной системой 100. Процесс согласования сам по себе известен, и его подробное описание опускается.
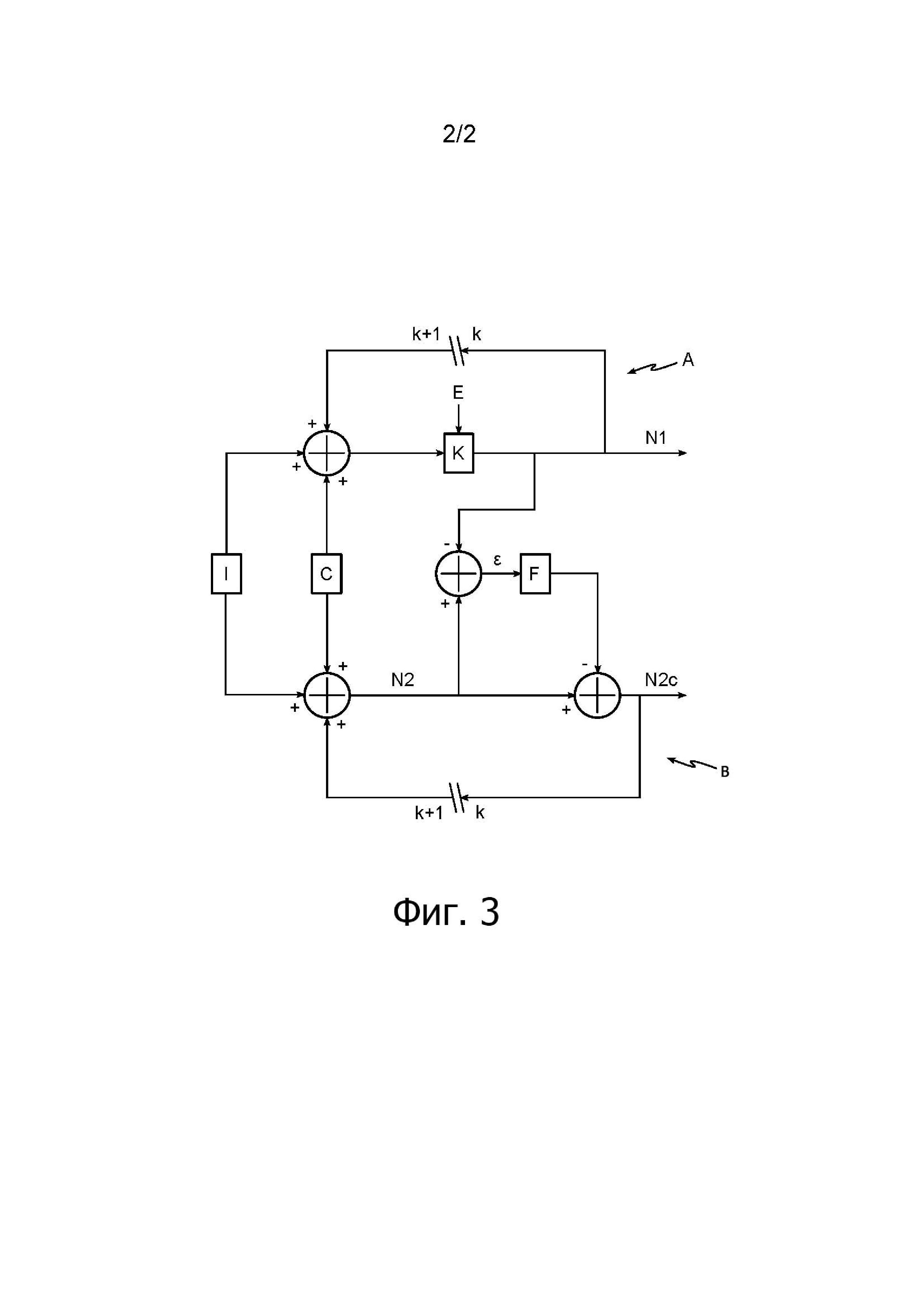
На фиг. 3 представлен процесс вычисления скорректированной навигации N2с в соответствии с изобретением.
Вычисление, производимое блоком 101 обработки для получения первой навигации N1, схематично показано в виде цепи А, включающей в себя фильтр Калмана К, получающий инерциальные навигационные данные I и неинерциальные навигационные данные Е. Вычисление, производимое в каждый момент k, служит основой для вычисления, производимого в момент k+1. Таким образом, первая навигация N1 является гибридной навигацией.
Согласно изобретению, блок 103 обработки запрограммирован, чтобы вычислять вторую инерциальную навигацию N2 на основании инерциальных навигационных данных. Метод вычисления второй навигации N2 является классическим.
На фиг. 3 это вычисление представлено в виде цепи В, получающей инерциальные навигационные данные I (которые являются теми же инерциальными данными, что получает блок 101 обработки). Вычисление, производимое в каждый момент k, служит основой для вычисления, производимого в момент k+1. Таким образом, вторая навигация N2 является инерциальной навигацией.
Следует отметить, что цепи А и В подвержены одной и той же систематической погрешности, показанной как С.
Кроме того, блок 103 обработки запрограммирован таким образом, чтобы вычислять в реальном времени отклонение ε между первой навигацией N1 и второй навигацией N2 и осуществлять на этом отклонении фильтрацию F нижних частот со временем схождения, большим относительно периода фильтра Калмана К и небольшим относительно периода Шулера. Можно напомнить, что период Шулера равен 84 минутам, тогда как период фильтра Калмана равен нескольким секундам. Например, время схождения определяют при помощи метода Монте-Карло, оценивая уровень эффективности навигаций, полученных при помощи моделирующей программы, имитирующей навигационную систему, на основании инерциальных измерений, в которые были введены случайно выбранные погрешности.
Блок 103 обработки использует отклонение ε, чтобы скорректировать вторую навигацию N2 и получить скорректированную навигацию N2с. Отклонение ε является результатом вычитания первой навигации N1 из второй навигации N2, и навигация N2с является результатом вычитания фильтрованного отклонения ε из второй навигации N2.
В данном случае скорректированную навигацию N2с используют для двух операций.
Во время использования оптронной сферы 50 можно в качестве цели рассматривать зону поля, охватываемого оптронной сферой 50 и управлять двигателем оптронной сферы 50 таким образом, чтобы удерживать указанный элемент в центре охватываемого поля, независимо от маневров летательного аппарата. Устройство 51 управления запрограммировано таким образом, чтобы управлять двигателем оптронной сферы 50, используя третью навигацию N2с.
В версии второго варианта осуществления, если скорректированная навигация N2с выработана с самого начала согласования, можно на первой стадии выбирать время схождения, равное периоду фильтра Калмана, затем увеличить его в соответствии с правилом временного изменения до оптимального значения, полученного путем моделирования.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любые версии, входящие в объем изобретения, определенный формулой изобретения.
В частности, вторую скорректированную навигацию N2с можно использовать для ориентации устройства наведения, для согласования или для других вариантов применения.
Эти два варианта осуществления можно комбинировать на одном и том же аппарате-носителе.
Блоки 101 и 103 обработки могут представлять собой единый блок обработки.
Изобретение можно применять для других носителей, отличных от летательных аппаратов.
Устройство защиты от заброса оборотов авиационного двигателя
Способ и устройство направления летательного аппарата
Система мониторинга оборудования летательного аппарата
Микроэлектромеханический маятниковый акселерометр, имеющий два диапазона измерения
Способ оценки навигационного состояния в условиях ограниченной возможности наблюдения
Способ обеспечения автоматической посадки летательного аппарата
Привод с облегченной установкой
Способ сбора оперативных данных летательного аппарата
Способ оценки внешней силы, действующей на электрогидростатический привод
Электромеханический привод подвижной поверхности управления полетом

