Результат интеллектуальной деятельности: СПОСОБ ДЛЯ ДВИГАТЕЛЯ С ТУРБОНАГНЕТАТЕЛЕМ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Системы двигателя могут использовать рециркуляцию отработавших газов из системы выпуска двигателя в систему впуска двигателя, процесс, указываемый ссылкой как рециркуляция отработавших газов (EGR), для снижения регулируемых выбросов. Например, система двигателя с турбонаддувом может включать в себя систему EGR низкого давления (LP), которая рециркулирует отработавшие газы из системы выпуска во впускной канал выше по потоку от компрессора турбонагнетателя. Соответственно, отработавшие газы могут рециркулироваться в систему впуска воздуха низкого давления выше по потоку от компрессора, давая в результате сжатую смесь свежего всасываемого воздуха и EGR ниже по потоку от компрессора. Клапан EGR может управляться для достижения требуемого разбавления всасываемого воздуха, требуемое разбавление всасываемого воздуха основано на рабочих условиях двигателя.
Однако, вследствие небольших перепадов давления, присущих контурам LP-EGR, системы двигателя с турбонагнетателем также могут включать в себя впускной дроссель LP для повышения перепада давления, из условия, чтобы могли достигаться более высокие скорости EGR. Есть конкурирующие требования, которые ограничивают степень дросселирования. С одной стороны, чрезмерное дросселирование излишне повышает расход топлива. С другой стороны, слишком малое дросселирование может заставлять систему работать на особенно низких перепадах давления, что делает необходимыми высокие коэффициенты усиления системы управления и, тем самым, уменьшает устойчивость системы управления к возмущениям.
Изобретатели в материалах настоящей заявки осознали вышеприведенную проблему и изобрели различные подходы для принятия мер в ответ на нее. В частности, раскрыты системы и способы для управления впускным дросселем LP и клапаном LP-EGR. В одном примере, способ для двигателя с турбонагнетателем содержит: в ответ на перепад между давлениями на впуске и выпуске ниже порогового значения, регулировку клапана LP-EGR наряду с регулировкой впускного дросселя LP для регулирования скорости потока LP-EGR и перепада до соответствующего заданного значения; и в ответ на перепад выше порогового значения, насыщение клапана LP-EGR для минимизации перепада наряду с тем, что приводят в действие дроссель для регулирования скорости потока до ее заданного значения. Таким образом, управление системой LP-EGR может быть более устойчивым, требовать меньшего перемещения приводов и повышать экономию топлива.
В одном варианте реализации изобретения регулированию скорости потока LP-EGR до заданного значения скорости потока отдают приоритет над регулированием перепада до заданного значения перепада.
В еще одном варианте реализации пороговое значение составляет 5 гектопаскалей.
В другом аспекте заданное значение скорости потока основано на рабочих условиях двигателя.
В еще одном аспекте заданное значение перепада равно пороговому значению.
В заявленном способе можно использовать пару пропорционально-интегральных контроллеров и контроллер линеаризации для управления впускным дросселем LP и клапаном LP-EGR.
При этом контроллер линеаризации основан на физической модели системы LP-EGR, физическая модель основана на допущениях несжимаемых отработавших газов и установившейся динамики клапана LP-EGR и впускного дросселя LP.
В другом варианте реализации двигатель с турбонагнетателем включает в себя канал EGR, и канал EGR соединяет выпуск двигателя ниже по потоку от турбины к впуску двигателя выше по потоку от компрессора.
При этом клапан LP-EGR расположен в канале EGR выше по потоку от компрессора, и при этом, впускной дроссель LP расположен в воздушном впускном канале впуска двигателя выше по потоку от компрессора.
В другом аспекте скорость потока измеряют ниже по потоку от клапана LP-EGR.
В еще одном примере, способ для двигателя с турбонагнетателем содержит: в ответ на перепад между давлениями на впуске и выпуске ниже порогового значения, регулировку клапана LP-EGR наряду с регулировкой впускного дросселя LP для регулирования скорости потока LP-EGR и перепада, соответственно, до заданного значения потока и заданного значения перепада; и в ответ на перепад выше порогового значения, в первом режиме, насыщение клапана LP-EGR для минимизации перепада наряду с тем, что приводят в действие дроссель для регулирования скорости потока до заданного значения потока, а во втором режиме, насыщение впускного дросселя для минимизации перепада наряду с тем, что приводят в действие клапан LP-EGR для регулирования скорости потока до заданного значения потока. Таким образом, система управления может быть более устойчивой к возмущениям при очень низких перепадах давления, а расход топлива, обусловленный чрезмерным дросселирование, может понижаться.
В одном аспекте регулированию скорости потока LP-EGR до заданного значения потока отдают приоритет над регулированием перепада до заданного значения перепада.
В другом аспекте скорость потока измеряют ниже по потоку от клапана EGR.
В еще одном аспекте заданное значение перепада равно пороговому значению.
В другом аспекте пороговое значение составляют 5 гектопаскалей.
Заданное значение потока может быть основано на рабочих условиях двигателя.
Можно использовать пару пропорционально-интегральных контроллеров и контроллер линеаризации для управления впускным дросселем LP и клапаном LP-EGR.
При этом контроллер линеаризации основан на физической модели системы LP-EGR, физическая модель основана на допущениях несжимаемых отработавших газов и установившейся динамики клапана EGR и впускного дросселя LP.
В еще одном примере, система двигателя внутреннего сгорания содержит: турбонагнетатель, включающий в себя компрессор, соединенный с турбиной, компрессор находится в сообщении с впускным коллектором двигателя, а турбина находится в сообщении с выпускным коллектором двигателя; канал рециркуляции отработавших газов (EGR) низкого давления (LP), включающий в себя клапан EGR и впускной дроссель, соединяющий впускной коллектор и выпускной коллектор, упомянутый клапан EGR реагирует на сигнал управления клапаном EGR, а упомянутый впускной дроссель реагирует на сигнал управления впускным дросселем для регулирования скорости потока в упомянутый впускной коллектор и перепада давления в упомянутом канале LP-EGR; контроллер, сконфигурированный командами, хранимыми в некратковременной памяти, которые, когда выполняются, побуждают контроллер: формировать ошибку скорости потока на основании опорной скорости потока и измеренной скорости потока; формировать ошибку перепада давления на основании опорного перепада давления и измеренного перепада давления; рассчитывать минимально и максимально достижимые скорости потока; прикладывать минимально и максимально достижимые скорости потока в качестве предельных значений антивиндапа к пропорционально-интегральному контроллеру; приводить в исполнение первый пропорционально-интегральный контроллер для формирования отрегулированного заданного значения скорости потока в ответ на ошибку скорости потока; рассчитывать минимально и максимально достижимые перепады давления в ответ на отрегулированное заданное значение скорости потока. прикладывать минимально и максимально достижимые перепады давления в качестве предельных значений антивиндапа к второму пропорционально-интегральному контроллеру; приводить в исполнение второй пропорционально-интегральный контроллер для формирования отрегулированного заданного значения перепада давления в ответ на ошибку перепада давления; приводить в исполнение контроллер линеаризации для формирования положения привода клапана EGR и положения привода впускного дросселя LP в ответ на отрегулированное заданное значение скорости потока и отрегулированное заданное значение перепада давления; и приводить клапан EGR в положение привода клапана EGR а впускной дроссель LP в положение привода впускного дросселя LP. Таким образом, управление клапаном LP-EGR и впускным дросселем LP может автоматически переключаться между режимом многомерного управления, который улучшает устойчивость на очень низких перепадах давления, и режимом управления сцепленными приводами, который минимизирует расход топлива.
Контроллер линеаризации может быть основан на физической модели системы LP-EGR, физическая модель основана на допущениях несжимаемых отработавших газов и установившейся динамики привода клапана EGR и привода впускного дросселя LP.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимается в одиночку или в связи с прилагаемыми чертежами.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
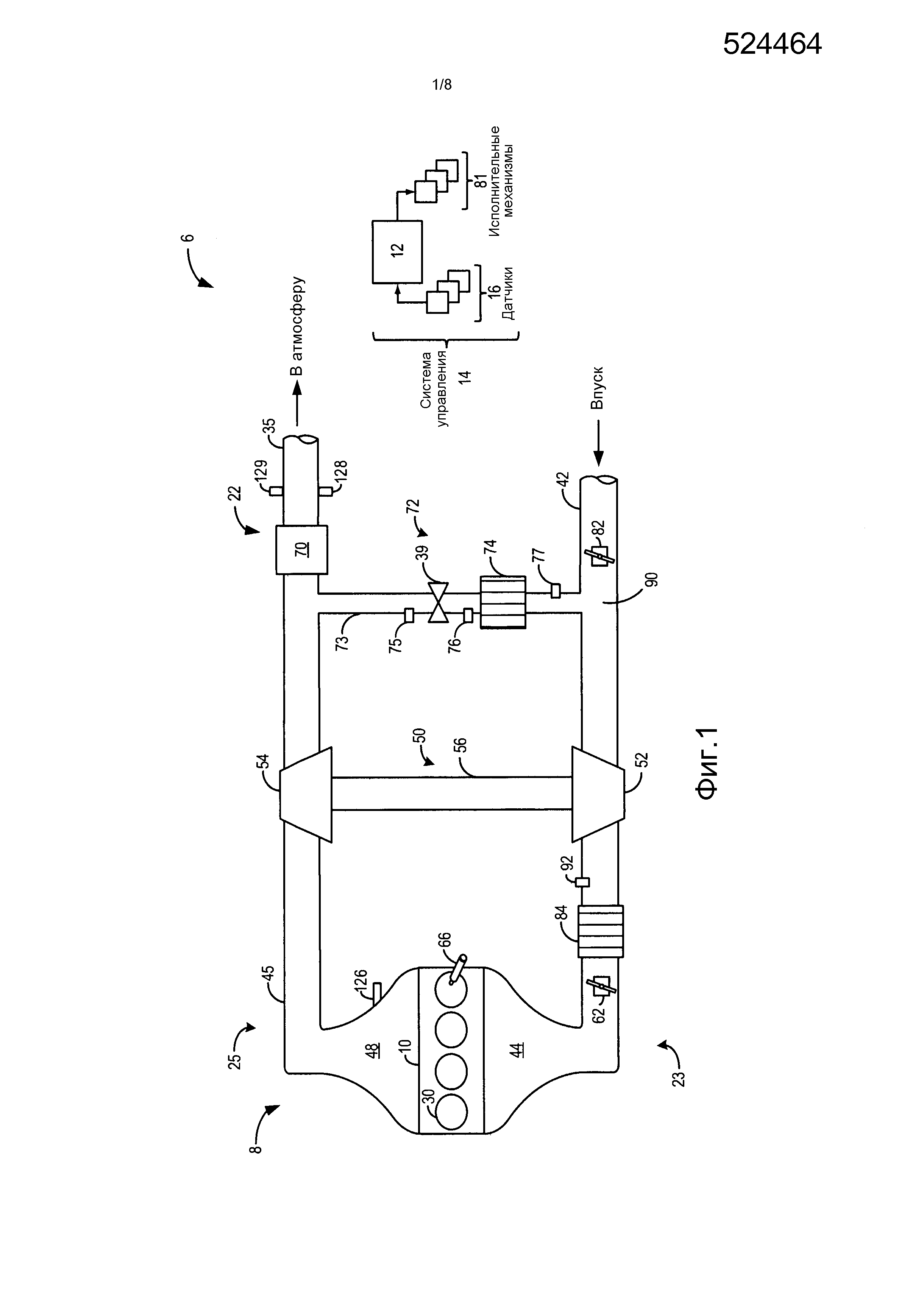
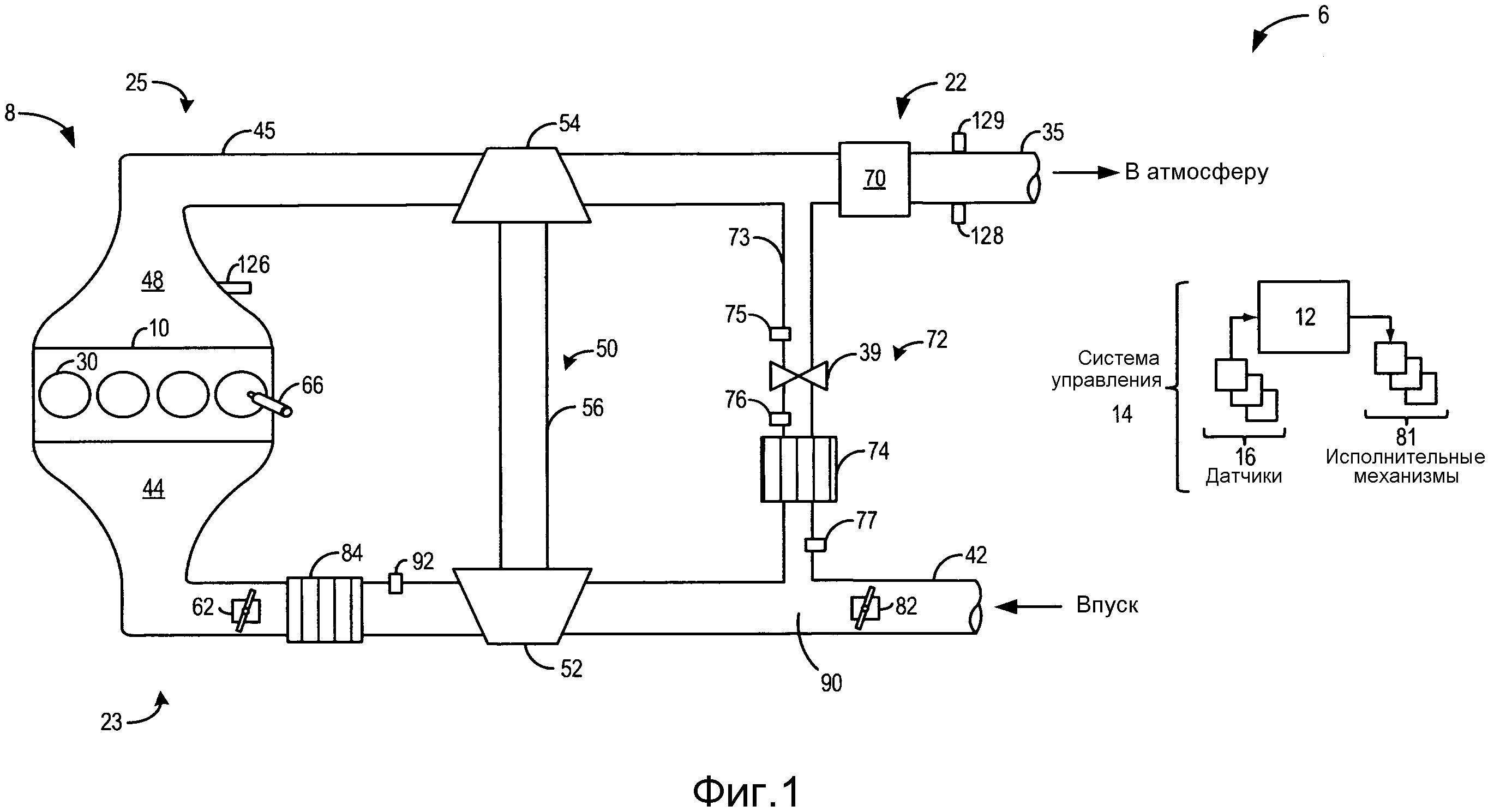
Фиг. 1 показывает схематическое изображение двигателя и ассоциативно связанной системы рециркуляции отработавших газов.
Фиг. 2 показывает высокоуровневую блок-схему последовательности операций способа, иллюстрирующую процедуру, которая может быть реализована для выполнения регулировок клапана LP-EGR и впускного дросселя LP в ответ на выходной сигнал датчика перепада давления.
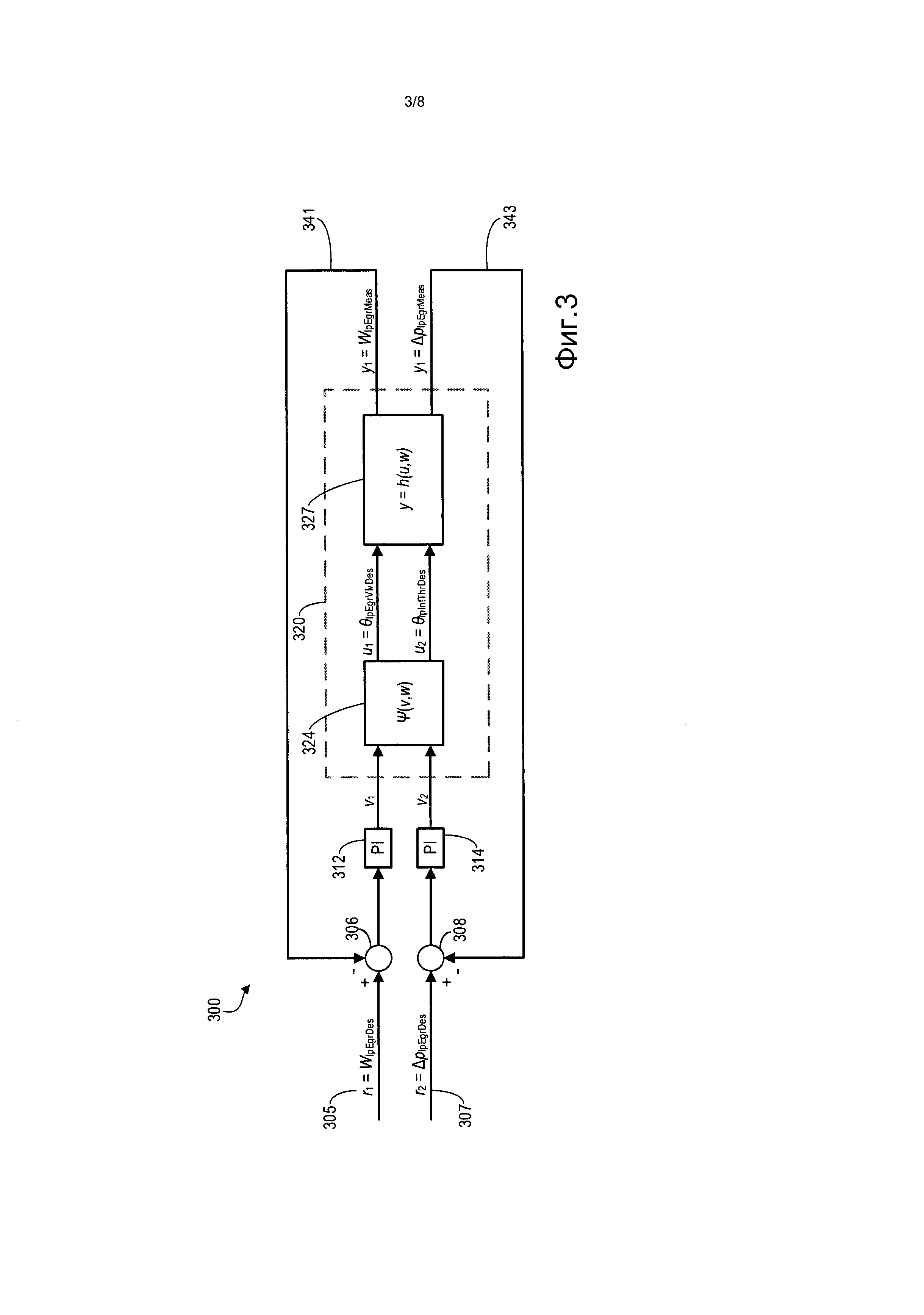
Фиг. 3 показывает структурную схему, иллюстрирующую примерный подход для управления LP-EGR.
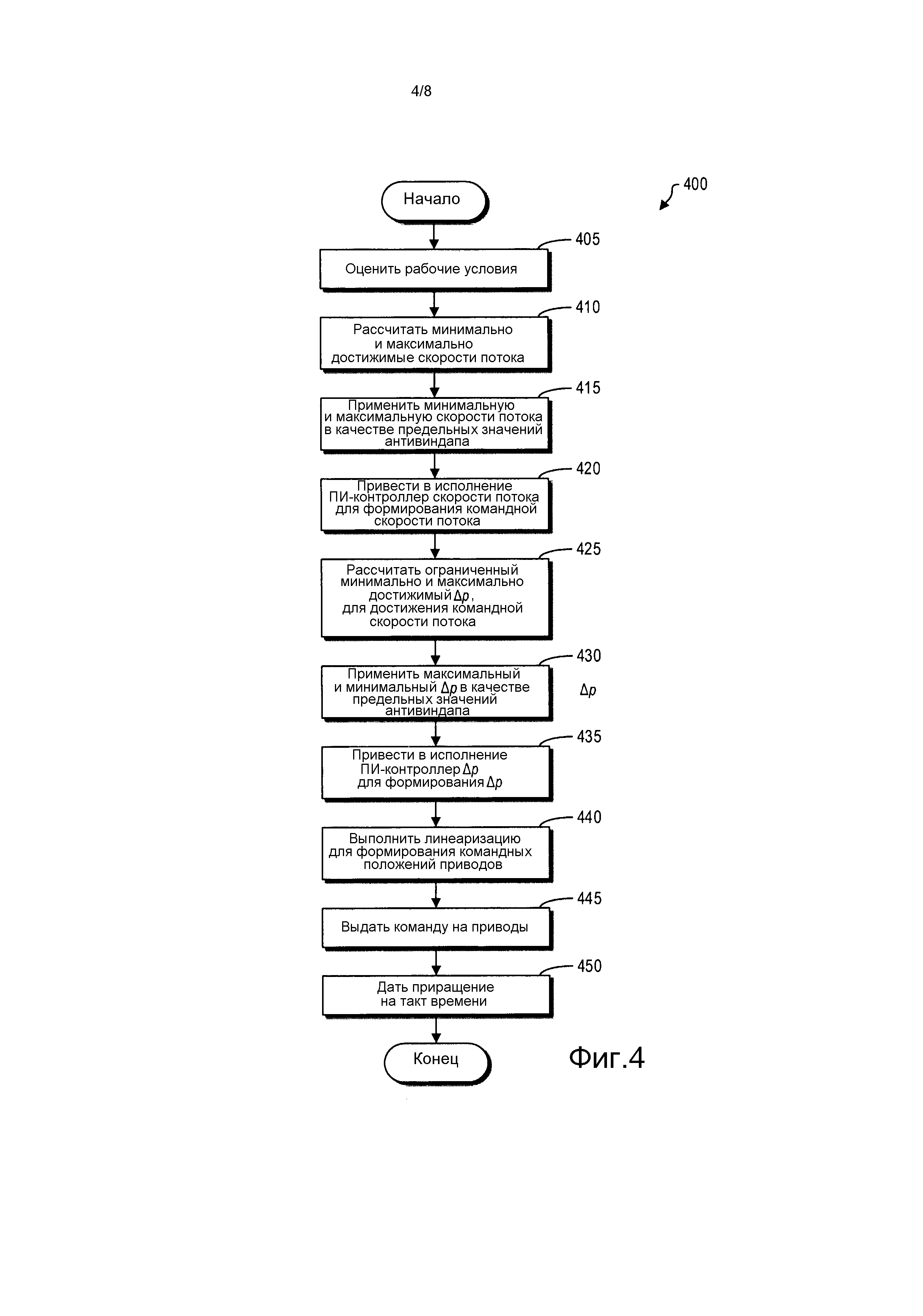
Фиг. 4 показывает высокоуровневую блок-схему последовательности операций способа, иллюстрирующую процедуру, которая может быть реализована для выполнения регулировок клапана LP-EGR и впускного дросселя LP в ответ на заданное значение скорости потока LP-EGR.
Фиг. 5 показывает набор графиков, который иллюстрирует стратегию ограничения для четырех возможных случаев насыщения одного привода.
Фиг. 6 показывает набор графиков, иллюстрирующий набор достижимых положений клапана LP-EGR и положений дросселя, и соответствующий набор достижимых скоростей потока LP-EGR и перепадов давления.
Фиг. 7 показывает набор графиков, иллюстрирующий демонстрацию функционирования контроллера LP-EGR в качестве многомерного контроллера.
Фиг. 8 показывает набор графиков, иллюстрирующий демонстрацию функционирования контроллера LP-EGR в качестве контроллера сцепленных приводов.
ПОДРОБНОЕ ОПИСАНИЕ
Последующее описание относится к системе и способу для управления массовым расходом и перепадом давления рециркуляции отработавших газов низкого давления с использованием клапана рециркуляции отработавших газов низкого давления и дросселя низкого давления. Как показано на фиг. 1, двигатель с наддувом может быть сконфигурирован системой рециркуляции отработавших газов (EGR) низкого давления (LP), которая может включать в себя клапан LP-EGR для регулировки количества отработавших газов, рециркулированных во впуск двигателя, а также впускной дроссель LP для регулировки перепада давления на клапане LP-EGR. Как показано на фиг. 2, управление клапаном LP-EGR и впускным дросселем LP может включать в себя многомерный режим и режим сцепленных приводов в зависимости от перепада давления на клапане LP-EGR. Как показано на фиг. 3, контроллер, делающий возможными два таких режима управления, может включать в себя контроллер, сконструированный посредством линеаризации входа-выхода в добавление к двум основным контурам пропорционально-интегрального (ПИ, PI) регулирования. Стратегия ограничения для ПИ-контроллеров может включать в себя минимально и максимально достижимые скорости потока EGR и перепады давления в качестве предельных значений антивиндапа, как показано на фиг. 4. Эта стратегия ограничения гарантирует, что, если один привод насыщается, ненасыщенный привод будет отдавать приоритет отслеживанию скорости потока EGR над перепадом давления, как показано на фиг. 5. Минимально и максимально достижимые скорости потока и перепады давления ограничены способностью приведения в действие системы, как показано на фиг. 6. Демонстрация, что раскрытые система и способы проявляют многомерный режим и режим сцепленных приводов, показана на фиг. 7 и 8.
Фиг. 1 показывает схематическое изображение системы 6 транспортного средства. Система 6 транспортного средства включает в себя систему 8 двигателя, включающую в себя двигатель 10, соединенный с системой 22 снижения токсичности выбросов. Двигатель 10 включает в себя множество цилиндров 30. Двигатель 10 также включает в себя впуск 23 и выпуск 25. Впуск 23 может принимать свежий воздух из атмосферы через впускной канал 42. Впускной канал 42 может включать в себя первый воздушный впускной дроссель 82, выполненный с возможностью регулировать количество свежего воздуха, который принимается через впускной канал 42. Впуск 23 дополнительно может включать в себя второй, основной впускной дроссель 62, соединенный по текучей среде с впускным коллектором 44 двигателя через впускной канал 42. Второй впускной дроссель 62 может быть расположен ниже по потоку от первого впускного дросселя 82 и может быть выполнен с возможностью регулировать течение потока всасываемых газов, поступающего во впускной коллектор 44 двигателя. Выпуск 25 включает в себя выпускной коллектор 48, ведущий в выпускной канал 45, который направляет отработавшие газы в атмосферу через выхлопную трубу 35.
Двигатель 10 может быть двигателем с наддувом, включающим в себя устройство наддува, такое как турбонагнетатель 50. Турбонагнетатель 50 может включать в себя компрессор 52, скомпонованный вдоль впускного коллектора 42, и турбину 54, скомпонованную вдоль выпускного канала 45. Величина наддува, выдаваемого турбонагнетателем, может меняться контроллером двигателя. Необязательный наддувочный доохладитель 84 может быть включен в состав ниже по потоку от компрессора 152 во впускном канале, чтобы понижать температуру всасываемого воздуха, сжатого турбонагнетателем. Более точно, доохладитель 84 может быть включен в состав ниже по потоку от первого впускного дросселя 82 и выше по потоку от второго впускного дросселя 62.
Система 22 снижения токсичности выбросов, соединенная с выпускным каналом 45, может включать в себя одно или более устройств 70 снижения токсичности выбросов, установленных в плотно соединенном положении в системе выпуска. Одно или более устройств снижения токсичности выбросов могут включать в себя сажевый фильтр, каталитический нейтрализатор SCR, трехкомпонентный каталитический нейтрализатор, уловитель обедненных NOx, окислительный каталитический нейтрализатор, и т. д. Устройства снижения токсичности выбросов могут быть расположены ниже по потоку от турбины 54 и выше по потоку и/или ниже по потоку от тракта 73 LP-EGR в выпускном канале 45.
Двигатель 10 дополнительно может включать в себя один или более каналов рециркуляции отработавших газов (EGR) для осуществления рециркуляции по меньшей мере части отработавших газов из выпускного канала 45 во впускной канал 42. Например, двигатель может включать в себя систему 72 EGR низкого давления (LP-EGR) с каналом 73 LP-EGR, соединяющим выпуск двигателя ниже по потоку от турбины 54 с впуском двигателя выше по потоку от компрессора 52. Система 72 LP-EGR может эксплуатироваться во время условий, таких как в отсутствие наддува турбонагнетателем, и/или когда температура отработавших газов находится выше порогового значения. Клапан 39 EGR, расположенный в канале 73 LP-EGR выше по потоку от компрессора, может быть выполнен с возможностью регулировать количество и/или расход отработавших газов, отводимых через канал EGR. Канал 73 LP-EGR дополнительно может включать в себя охладитель 74 LP-EGR, чтобы понижать температуру отработавших газов, рециркулируемых во впуск двигателя. В этой конфигурации, канал EGR может быть выполнен с возможностью обеспечивать EGR низкого давления, а клапан 39 EGR может быть клапаном LP-EGR. Кроме того, первый впускной клапан 82 может указываться ссылкой как впускной дроссель низкого давления (LP). В альтернативных вариантах осуществления, система EGR высокого давления (HP-EGR) (не показанная) также может быть включена в состав, в которой, канал HP-EGR может быть выполнен с возможностью отводить по меньшей мере некоторое количество отработавших газов с выпуска двигателя выше по потоку от турбины на впуск двигателя ниже по потоку от компрессора.
В некоторых вариантах осуществления, один или более датчиков могут быть расположены в канале 73 LP-EGR, чтобы выдавать показание одного или более из давления, температуры и отношения количества воздуха к количеству топлива отработавших газов, подвергаемых рециркуляции по каналу LP-EGR. Например, датчики 75 и 76 могут быть датчиками давления, расположенными выше по потоку и ниже по потоку от клапана 39 LP-EGR. Отработавшие газы, подаваемые по каналу 73 LP-EGR, могут разбавляться свежим воздухом в точке 90 смешивания, расположенной в месте соединения канала 73 LP- EGR и впускного канала 42. Более точно, посредством регулировки клапана 39 EGR в координации с впускным дросселем 82 LP (расположенным в воздушном впускном канале впуска двигателя выше по потоку от компрессора), может регулироваться разбавление потока EGR.
Двигатель 10 может управляться, по меньшей мере частично, системой 14 управления, включающей в себя контроллер 12 и входными сигналами от водителя транспортного средства через устройство ввода (не показано). Система 14 управления выполнена с возможностью принимать информацию с множества датчиков 16 (различные примеры которых описаны в материалах настоящей заявки) и отправляющей сигналы управления на множество исполнительных механизмов 81. В качестве одного из примеров, датчики 16 могут включать в себя датчик 126 отработавших газов, соединенный с выпускным коллектором 48, датчик 128 температуры отработавших газов и датчик 129 давления отработавших газов, расположенные ниже по потоку от устройства 70 снижения токсичности выбросов в выхлопной трубе 35, датчик 92 кислорода, соединенный выше по потоку от основного впускного дросселя 62, и различные датчики в канале 73 LP-EGR, такие как датчики 75 или 76 давления, расположенные выше и ниже по потоку от клапана 39 LP-EGR, и датчик 77 скорости потока EGR. Различные датчики отработавших газов также могут быть включены в выпускной канал 45 ниже по потоку от устройства 70 снижения токсичности выбросов, такие как датчики твердых частиц (PM), датчики NOx, датчики кислорода, датчики аммиака, датчики углеводородов, и т. д. Другие датчики, такие как дополнительные датчики давления, температуры, топливо/воздушного соотношения и состава могут быть присоединены в различных местоположениях в системе 6 транспортного средства. В качестве еще одного примера, исполнительные механизмы 81 могут включать в себя топливную форсунку 66, клапан 39 EGR, впускной дроссель 82 LP и основной впускной дроссель 62. Другие исполнительные механизмы, такие как многообразие дополнительных клапанов и заслонок, могут быть присоединены в различных местоположениях в системе 6 транспортного средства. Контроллер 12 может принимать входные данные с различных датчиков, обрабатывать входные данные и приводить в действие исполнительные механизмы в ответ на обработанные входные данные, на основании команды или кода, запрограммированных в нем, соответствующих одной или более процедур. Например, контроллер 12 может быть выполнен с возможностью вычислять перепад давления на клапане 39 LP-EGR посредством расчета разности между входным данными, принятыми с датчика 76 давления и датчика 75 давления. Примерная процедура управления описана в материалах настоящей заявки со ссылкой на фиг. 2.
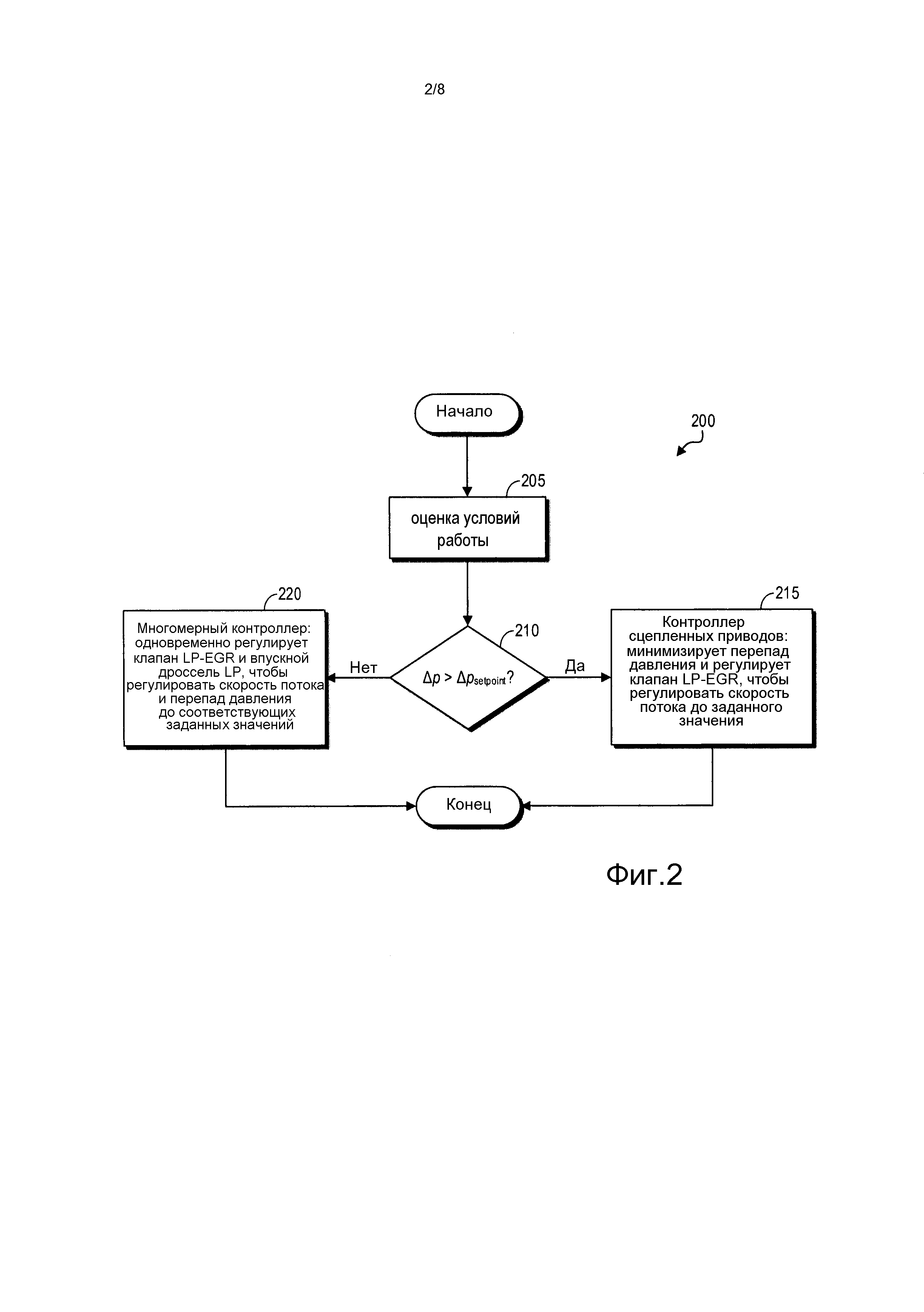
Фиг. 2 показывает высокоуровневую блок-схему последовательности операций способа для примерного способа 200 для управления системой LP-EGR в соответствии с данным раскрытием. В частности, способ 200 относится к использованию двух разных стратегий управления в ответ на перепад давления на клапане 39 LP-EGR. Способ 200 будет описан в материалах настоящей заявки со ссылкой на компоненты и системы, изображенные на фиг. 1, хотя, должно быть понятно, что способ может быть применен к другим системам, не выходя из объема этого раскрытия. Способ 200 может выполняться контроллером 12 и может храниться в качестве исполняемых команд в некратковременной памяти.
Способ 200 может начинаться на 205. На 205, способ 200 может включать в себя оценивание рабочих условий. Рабочие условия могут включать в себя, но не в качестве ограничения, перепад давления LP-EGR, скорость потока LP-EGR, положение клапана LP-EGR, положение впускного дросселя LP, и т. д. Оценивание рабочих условий может содержать прием входных данных с различных датчиков и выполнение вычисления с использованием упомянутых входных данных. Например, перепад давления LP-EGR на клапане 39 LP-EGR может рассчитываться посредством вычисления разности между данными давления с датчиков 75 и 76 давления. При отсутствии датчиков 75 и 76 давления, перепад давления LP-EGR может приближенно выражаться по измерению давления измерителя перед компрессором, например, ΔplpEgrMeas≈pamb-pcmprUs, которое пренебрегает незначительным падением давления на выхлопной трубе для отработавших газов.
Продолжая на 210, перепад ΔplpEgrMeas давления на клапане 39 LP-EGR сравнивается с заданным значением Δpsetpoint перепада давления LP-EGR. Заданное значение Δpsetpoint перепада давления LP-EGR может быть установлено в низкий, но ненулевой перепад давления, например, 5 гектопаскалей (гПа). Если перепад ΔplpEgrMeas давления является большим, чем заданное значение Δpsetpoint перепада, способ 200 может продолжаться на 215. На 215, контроллер 12 может действовать в качестве контроллера сцепленных приводов. Контроллер 12 закрывает впускной дроссель 82 LP, чтобы минимизировать перепад давления, а затем, регулирует клапан 39 LP-EGR для регулирования скорости потока LP-EGR до заданного значения WlpEgr скорости потока LP-EGR. Эта стратегия управления минимизирует расход топлива, обусловленный насосной работой LP-EGR. Способ 200 затем может заканчиваться. Иначе, если перепад ΔplpEgrMeas давления является меньшим, чем заданное значение Δpsetpoint перепада, способ 200 может продолжаться на 220.
На 220, способ 200 может действовать в качестве многомерного контроллера. Контроллер 12 одновременно регулирует клапан 39 LP-EGR и впускной дроссель 82 LP, чтобы регулировать скорость WlpEgr потока и перепад ΔplpEgrMeas давления LP-EGR до их соответствующих заданных значений. Эта стратегия управления предоставляет системе возможность избегать больших коэффициентов усиления системы управления и пониженной устойчивости системы управления, которые проявляются на очень низких перепадах давления. Способ 200 затем может заканчиваться.
Способ 200 управления, таким образом, использует две стратегии управления в ответ на перепад давления относительно заданного значения перепада давления. С использованием способа 200, контроллер 12 может автоматически переключаться между функционированием в качестве контроллера сцепленных приводов и многомерного контроллера, каждый со своими собственными преимуществами. Примерный подход к реализации способа 200 раскрыт в материалах настоящей заявки со ссылкой на фиг. 3 и 4.
Фиг. 3 показывает примерный подход 300 для управления LP-EGR. Примерный подход 300 спроектирован с линеаризацией входа-выхода и пропорционально-интегральным регулированием. Примерный подход 300 включает в себя стационарный виртуальный объект 320 и два основных контура с ПИ-контроллерами 312 и 314.
Опорный сигнал 305, r1 = WlpEgrDes, представляет собой опорную требуемую скорость потока LP-EGR наряду с тем, что опорный сигнал 307, r2 = ΔplpEgrDes, представляет собой опорный требуемый перепад давления LP-EGR. Сигнал 341 обратной связи, y1 = WlpEgrMeas, представляет собой измеренную скорость потока LP-EGR наряду с тем, что сигнал 343 обратной связи, y2 = ΔplpEgrMeas, представляет собой измеренный перепад давления LP-EGR. Узел 306 вычисляет разность меду опорным сигналом 305 и сигналом 341 обратной связи, эта разность является ошибкой, ассоциативно связанной с скоростью потока LP-EGR. Узел 308 вычисляет разность меду опорным сигналом 307 и сигналом 343 обратной связи, эта разность является ошибкой, ассоциативно связанной с перепадом давления LP-EGR.
Примерный подход 300 может включать в себя ПИ-контроллер 312 основного контура и ПИ-контроллер 314 основного контура. ПИ-контроллер 312 основного контура формирует отрегулированный входной сигнал v1=WlpEgrDes, включающий в себя составляющую пропорционального усиления и составляющую интегрального усиления для ошибки r1-y1, вычисленной в узле 306. ПИ-контроллер 314 основного контура, подобным образом, формирует отрегулированный входной сигнал v2=ΔplpEgrDes, включающий в себя составляющую пропорционального усиления и составляющую интегрального усиления для ошибки r2-y2, вычисленной в узле 308. ПИ-контроллеры 312 и 314 основного контура дают нулевую ошибку отслеживания устойчивого состояния и улучшают устойчивость к ошибкам моделирования в обратной модели Ψ(v,w) объекта, дополнительно обсужденной в материалах настоящей заявки. ПИ-контроллеры 312 и 314 могут быть калиброваны, чтобы давать постоянную времени замкнутого контура приблизительно 150-200 мс для обоих контуров.
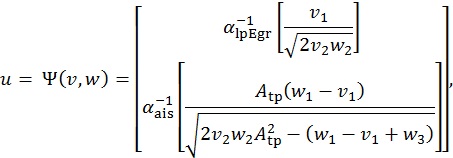
Виртуальный объект 320 характеризует контроллер 324 и модель 327 объекта. Контроллер 324 использует входные сигналы v1 и v2, представляющие собой требуемые скорость потока LP-EGR и перепад давления LP-EGR для определения надлежащих положения u1=θlpEgrVlvDes дросселя клапана LP-EGR и положения u2=θlpIntThrDes впускного дросселя LP. Модель 327 объекта представляет собой физическую систему LP-EGR, а потому, основана на уравнениях диафрагмы несжимаемого потока для впускного дросселя LP, тракта LP-EGR и выхлопной трубы, а также ассоциативно связанной динамике, которая присуща датчикам и исполнительным механизмам. Динамика объекта 327 является нелинейной и многомерной:


и значит, надлежащий закон Ψ(x,v,w) управления должен быть выбран для линеаризации и развязывания объекта. Однако, динамика объекта является быстрой относительно масштаба времени основных контуров, с постоянной времени приблизительно 50 мс или меньше. Поэтому, широкополосная природа объекта делает возможным допущение, что объект всегда находится в установившемся состоянии, тем самым устраняя виртуальную обратную связь x, как показано виртуальным объектом 320. С этим допущением, линеаризация входа-выхода виртуального объекта 320 сокращается до нахождения алгебраической инверсии многомерной нелинейной модели объекта. В предпочтительном варианте осуществления, представляющий единственное решение контроллер 324 задан посредством:
где  - площадь сечения выхлопной трубы,
- площадь сечения выхлопной трубы,  - передаточная функция положения в площадь сечения привода, задающая полезную площадь сечения тракта LP-EGR
- передаточная функция положения в площадь сечения привода, задающая полезную площадь сечения тракта LP-EGR  (включающего в себя канал 73, клапан 39 и охладитель 74 LP-EGR), а
(включающего в себя канал 73, клапан 39 и охладитель 74 LP-EGR), а  - передаточная функция положения в площадь сечения привода, дающая полезную площадь сечения системы впуск воздуха
- передаточная функция положения в площадь сечения привода, дающая полезную площадь сечения системы впуск воздуха  (включающей в себя впускной дроссель 82 LP). Отметим, что управляющие входные сигналы u, внутренние входные сигналы w, и выходные сигналы y формально определены в качестве:
(включающей в себя впускной дроссель 82 LP). Отметим, что управляющие входные сигналы u, внутренние входные сигналы w, и выходные сигналы y формально определены в качестве:

где Wcmpr - массовый расход через компрессор, ρamb - плотность окружающего воздуха, а Wf - массовый расход впрыскиваемого топлива.
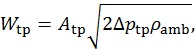
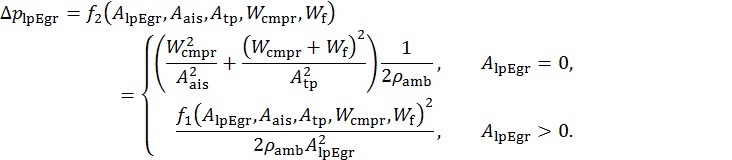
В предпочтительном варианте осуществления, стационарная модель 327 объекта моделируется с помощью системы уравнений диафрагмы несжимаемого потока и балансов масс. Модель 327 объекта может быть записана просто как:

где функции  и
и  заданы посредством:
заданы посредством:


Функции f1 и f2 могут быть получены посредством решения системы трех уравнений диафрагмы и двух ограничений сохранения массы. Три уравнения диафрагмы, используемые для моделирования газового потока через канал 73 LP-EGR, систему 42 впуска воздуха и выхлопную трубу 35, заданы согласно:


где перепады давления заданы посредством:



Давление  указывает ссылкой на давление, измеренное выше по потоку от клапана 39 LP-EGR наряду с тем, что давление
указывает ссылкой на давление, измеренное выше по потоку от клапана 39 LP-EGR наряду с тем, что давление  указывает ссылкой на давление, измеренное выше по потоку от компрессора 52. Сохранение массы принудительно применяется в точке 90 смешивания LP-EGR и для полной массы, поступающей в воздушный тракт через систему 42 впуска воздуха, и выходящий из воздушного тракта через выхлопную трубу 35:
указывает ссылкой на давление, измеренное выше по потоку от компрессора 52. Сохранение массы принудительно применяется в точке 90 смешивания LP-EGR и для полной массы, поступающей в воздушный тракт через систему 42 впуска воздуха, и выходящий из воздушного тракта через выхлопную трубу 35:


Решение вышеприведенной системы управлений диафрагменного потока и сохранения массы для скорости WlpEgr потока LP-EGR и перепада ΔplpEgr давления LP-EGR дает:

Специалисты в данной области техники будут принимать во внимание, что многомерная статическая модель 327 объекта, описанная только что, точно моделирует поведение системы LP-EGR. Более того, линеаризованный контроллер  в особенности получается из модели 327 объекта посредством определения обратной функции
в особенности получается из модели 327 объекта посредством определения обратной функции  , которая отображает y в u, при условии w, из условия чтобы виртуальный объект 320 был линеаризованным и развязанным:
, которая отображает y в u, при условии w, из условия чтобы виртуальный объект 320 был линеаризованным и развязанным:

Примерный подход 300 для управления LP-EGR демонстрирует два отдельных режима управления, описанных в материалах настоящей заявки со ссылкой на фиг. 2, а кроме того, описанных в материалах настоящей заявки со ссылкой на фиг. 5, 6, 7 и 8.
Фиг. 4 показывает высокоуровневую блок-схему последовательности операций способа, иллюстрирующую примерный способ 400 управления, реализованный контроллером, описанным в материалах настоящей заявки, со ссылкой на фиг. 3. В частности, способ 400 содержит стратегию ограничения ПИ-регулирования, которая отдает приоритет отслеживания заданного значения скорости потока LP-EGR. То есть, если клапан LP-EGR или впускной дроссель LP насыщается, то способность одновременно отслеживать заданное значение скорости потока LP-EGR и заданное значение перепада давления теряется, и приоритет отдается отслеживанию заданного значения скорости потока.
Способ 400 может начинаться на 405. На 405, способ 400 может включать в себя оценивание рабочих условий. Оценивание рабочих условий может включать в себя измерение управляющих входных сигналов u, внутренних входных сигналов w и выходных сигналов y, как определено в материалах настоящей заявки и со ссылкой на фиг. 3. Способ 400 затем может продолжаться на 410.
На 410, способ 400 может включать в себя расчет минимально и максимально допустимых скоростей потока LP-EGR. Расчет минимально и максимально достижимых скоростей потока LP-EGR,  и
и  , например, может включать в себя оценивание:
, например, может включать в себя оценивание:


где k - текущий такт времени. Примерные результаты такого расчета дополнительно обсуждены в материалах настоящей заявки и со ссылкой на фиг. 6. Способ 400 затем может продолжаться на 415.
На 415, способ 400 может включать в себя применение минимальной и максимальной скоростей и  потока в качестве предельных значений антивиндапа к ПИ-контроллеру 312. Применение минимальной и максимальной скоростей потока в качестве предельных значений антивиндапа к ПИ-контроллеру 312 ограничивает последующую ПИ-командную скорость потока,
потока в качестве предельных значений антивиндапа к ПИ-контроллеру 312. Применение минимальной и максимальной скоростей потока в качестве предельных значений антивиндапа к ПИ-контроллеру 312 ограничивает последующую ПИ-командную скорость потока,  , физически достижимыми скоростями потока LP-EGR, то есть:
, физически достижимыми скоростями потока LP-EGR, то есть:

Способ 400 затем может продолжаться на 420. На 420, способ 400 может включать в себя приведение в исполнение ПИ-контроллера 312 скорости потока для формирования командной скорости потока, . Способ 400 затем может продолжаться на 425.
На 425, способ 400 может включать в себя расчет ограниченных минимально и максимально достижимых перепадов Δp давления для достижения командной скорости потока. Расчет минимально и максимально достижимых перепадов давления,  и , например, может включать в себя оценивание:
и , например, может включать в себя оценивание:


где Su - область значений, в пределах которой ограничены положения привода,

Таким образом, минимально и максимально достижимые перепады давления LP-EGR подвергаются ограничению достижения командной скорости потока LP-EGR,  . Примерные результаты такого расчета дополнительно обсуждены в материалах настоящей заявки и со ссылкой на фиг. 6. Способ 400 затем может продолжаться на 430.
. Примерные результаты такого расчета дополнительно обсуждены в материалах настоящей заявки и со ссылкой на фиг. 6. Способ 400 затем может продолжаться на 430.
На 430, способ 400 может включать в себя применение минимально и максимально достижимых перепадов Δp давления в качестве предельных значений антивиндапа к ПИ-контроллеру 314. Применение минимально и максимально достижимых перепадов давления в качестве предельных значений антивиндапа к ПИ-контроллеру 314 ограничивает последующий ПИ-командный перепад давления,  , физически достижимыми перепадами давления, то есть:
, физически достижимыми перепадами давления, то есть:

Способ 400 затем может продолжаться на 435. На 435, способ 400 может включать в себя выполнение ПИ-контроллера перепада давления для формирования командного перепада давления . Способ 400 затем может продолжаться на 440.
На 440, способ 400 может включать в себя осуществление линеаризации для формирования командных положений приводов. Осуществление линеаризации для формирования командных положений приводов может выполняться контроллером 324 в соответствии со схемой линеаризации, раскрытой со ссылкой на фиг. 3, из условия чтобы:

Способ 400 затем может продолжаться на 445. На 445, способ 400 может включать в себя выдачу команд на приводы в сформированные командные положения приводов. Сформированные командные положения приводов заданы посредством u(k). Способ 400 затем может продолжаться на 450. На 450, способ 400 может включать в себя положительное приращение таймера на один такт, например, k=k+1. Способ 400 затем может заканчиваться.
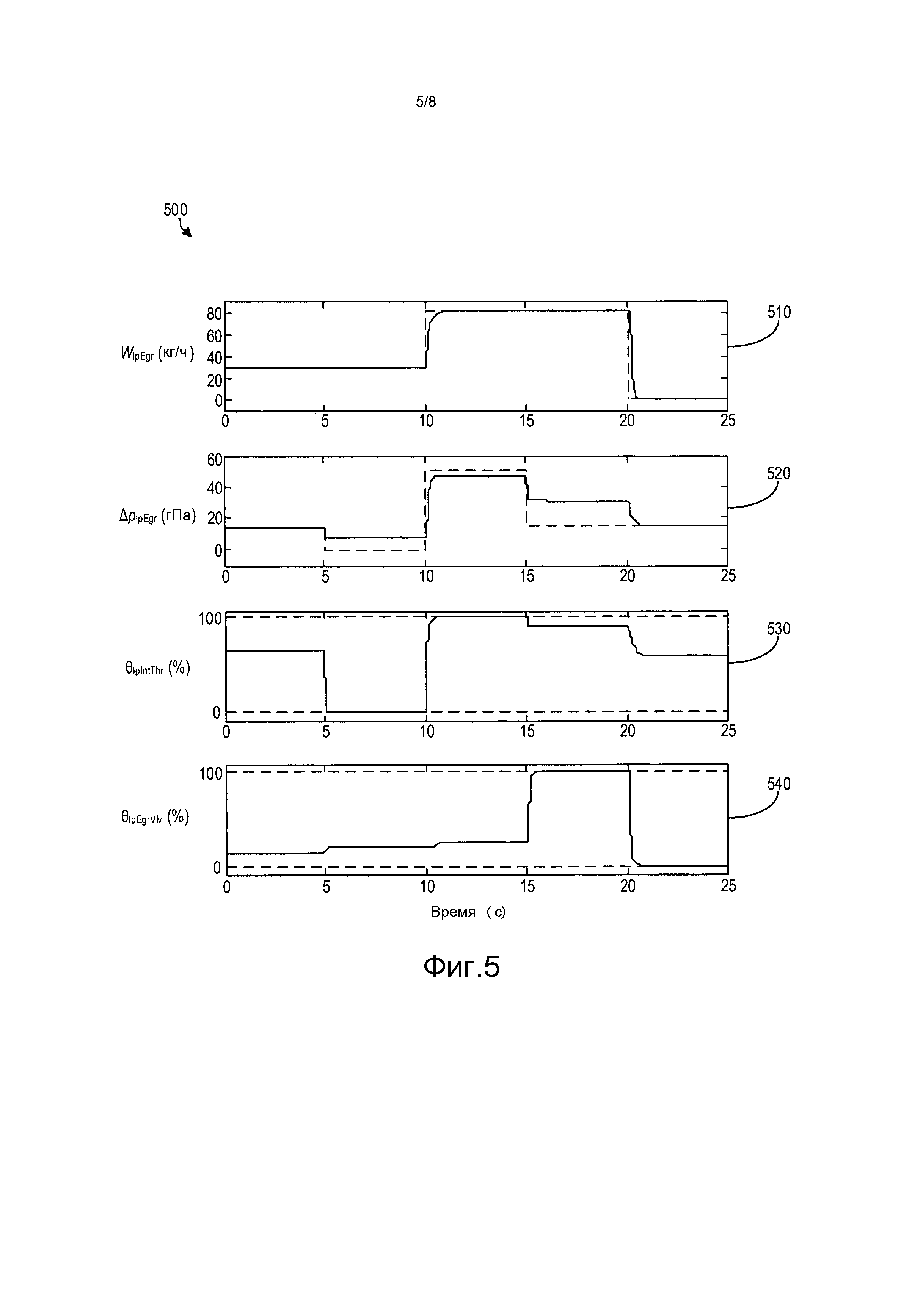
Фиг. 5 показывает набор графиков 500, иллюстрирующих стратегию ограничения для всех четырех возможных случаев насыщения одного привода в соответствии с данным раскрытием. График 510 показывает кривую скорости WlpEgr потока LP-EGR со временем. Пунктирная линия на графике 510 представляет собой заданное значение скорости потока LP-EGR, а сплошная линия представляет собой измеренную скорость потока LP-EGR. Кривая 520 показывает перепад ΔplpEgr давления LP-EGR со временем. Пунктирная линия на графике 520 представляет собой заданное значение перепада давления LP-EGR, а сплошная линия представляет собой измеренный перепад давления LP-EGR. График 530 показывает кривую θlpIntThr впускного дросселя LP со временем. График 540 показывает кривую положения θlpEgrVlv клапана LP-EGR со временем.
От 0 секунд до 5 секунд, впускной дроссель LP и клапан LP-EGR оба частично открыты, как показано на графиках 530 и 540. Измеренные скорость потока LP-EGR и перепад давления LP-EGR оба близки к своим соответственным заданным значениям, как видно на графиках 510 и 520.
От 5 секунд до 10 секунд, привод впускного дросселя LP насыщен, как видно на графике 530. Положение θlpIntThr впускного дросселя LP находится на 0%, означая, что впускной дроссель LP полностью открыт. В ответ на насыщение привода впускного дросселя LP, положение клапана LP-EGR возрастает, как видно на графике 540. График 510 показывает, что, в течение этого периода времени, измеренная скорость потока LP-EGR поддерживается около заданного значения. Тем временем, график 520 показывает, что измеренный перепад ΔplpEgr давления LP-EGR не способен достигать заданного значения перепада давления.
От 10 секунд до 15 секунд, привод впускного дросселя LP вновь насыщается. Однако, в этом случае, положение θlpIntThr впускного дросселя находится на 100%, означая, что впускной дроссель LP полностью закрыт. В ответ на насыщение привода впускного дросселя LP, положение θlpEgrVlv клапана LP-EGR возрастает. Это увеличенное положение θlpEgrVlv клапана LP-EGR поддерживает измеренную скорость WlpEgr потока LP-EGR очень близкой к заданному значению скорости потока. Тем временем, измеренный перепад ΔplpEgr давления LP-EGR еще раз не способен достигать заданного значения перепада давления.
От 15 до 20 секунд, привод клапана LP-EGR насыщен. Положение θlpEgrVlv клапана LP-EGR находится на 100%, означая, что клапан LP-EGR полностью открыт. В ответ на насыщение привода клапана LP-EGR, положение θlpIntThr впускного дросселя LP слегка уменьшается. Это уменьшенное положение θlpIntThr впускного дросселя LP поддерживает измеренную скорость WlpEgr потока LP-EGR очень близкой к заданному значению скорости потока. Тем временем, измеренный перепад ΔplpEgr давления LP-EGR не способен достигать заданного значения перепада давления.
От 20 до 25 секунд, привод клапана LP-EGR вновь насыщен. Скорость WlpEgr потока LP-EGR является нулевой, поэтому, положение θlpEgrVlv клапана LP-EGR находится на 0%, то есть, клапан LP-EGR полностью закрыт, чтобы самоочевидно добиваться заданного значения скорости потока. Положение θlpIntThr впускного дросселя LP уменьшается, для того чтобы поддерживать измеренный перепад ΔplpEgr давления LP-EGR на заданном значении перепада давления. Это может иметь место, только в тех случаях, когда привод насыщен, в то время как достигаются оба заданных значения.
В каждом случае, заданное значение массового расхода LP-EGR с нулевой установившейся ошибкой наряду с тем, что ошибка регулирования присутствует в перепаде давления LP-EGR. В последнем случае, клапан LP-EGR полностью закрыт наряду с тем, что впускной дроссель LP частично открыт. Это происходит, только когда требуемая скорость потока LP-EGR, WlpEgrDes = 0, а требуемый перепад ΔplpEgrDes давления LP-EGR установлен большим, чем недросселированный перепад давления, вызывая дросселирование, в то время как клапан LP-EGR закрыт. Этот случай бесполезен во время нормальной работы двигателя и может избегаться посредством установки ΔplpEgrDes = 0 всякий раз, когда WlpEgrDes = 0, тем самым, вынуждая дроссель полностью открываться всякий раз, когда требуемая скорость потока является нулевой. Таким образом, многомерный контроллер может вынуждаться работать в качестве контроллера сцепленных приводов посредством намеренной установки заданного значения перепада давления недостижимо низким, например, ΔplpEgrDes = 0. В предпочтительном варианте осуществления, заданное значение перепада давления, ΔplpEgrDes = 5 гПа, так чтобы контроллер работал в качестве контроллера сцепленных приводов, когда перепад давления находится выше заданного значения, и возобновлял работу в качестве многомерного контроллера, когда перепад давления находится ниже заданного значения.
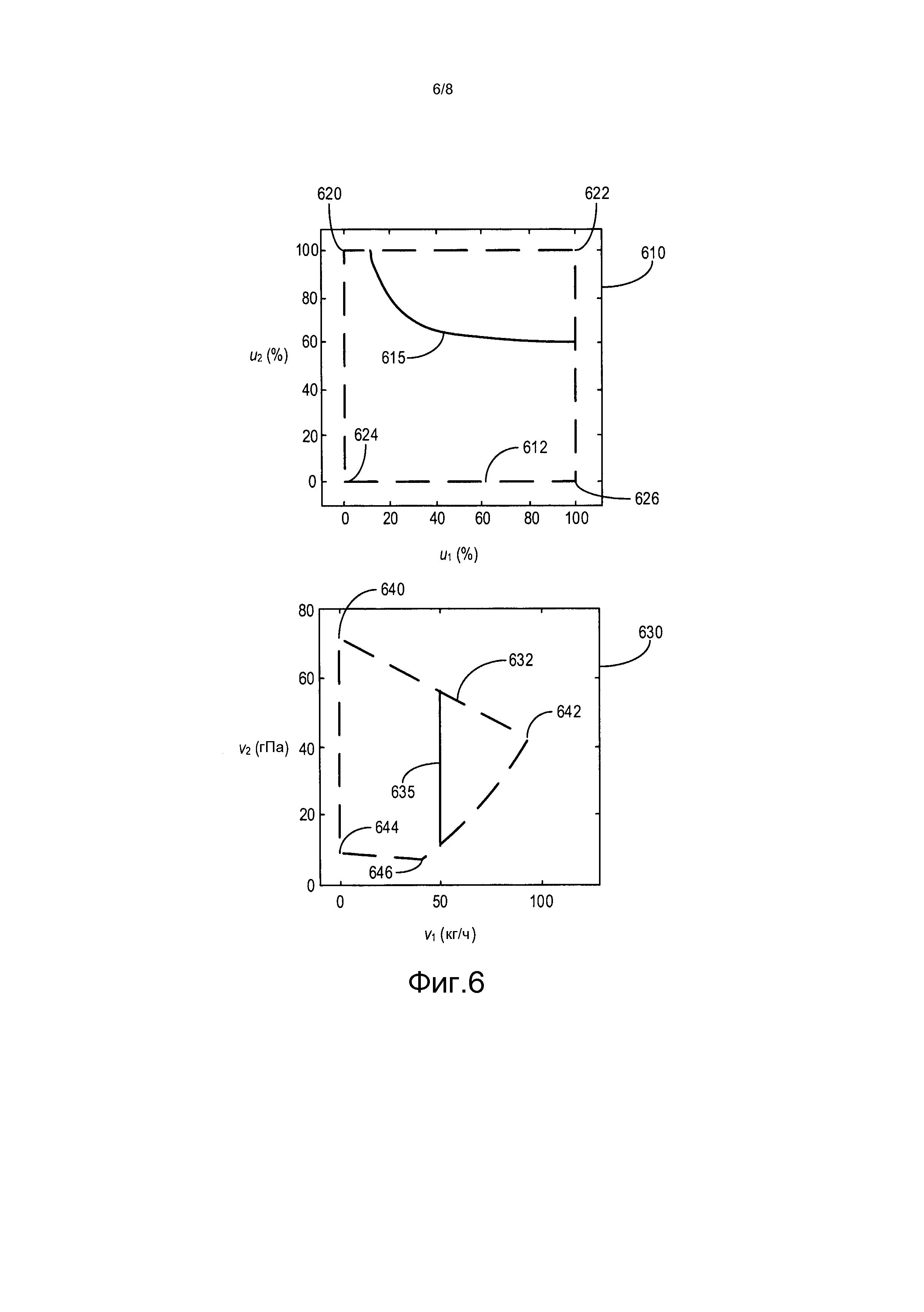
Фиг. 6 показывает иллюстрацию набора достижимых положений клапана и дросселя LP-EGR, а также соответствующих скоростей потока и перепадов давления LP-EGR в соответствии с данным раскрытием. Показанные кривые были созданы с использованием системы и способов, раскрытых выше со ссылкой на фиг. 3 и 4 при условии, что скорость потока компрессора, Wcmpr=400 кг/ч, а плотность окружающего воздуха, ρamb = 1,19 кг/м3.
График 610 показывает набор достижимых положений u1 клапана LP-EGR и положений u2 впускного дросселя LP. Ось x графика 610 представляет собой положение u1 клапана LP-EGR в качестве процентного отношения, где 0% соответствует полностью закрытому клапану, а 100% соответствует полностью открытому положению. Ось y графика 610 представляет собой положение u2 впускного дросселя LP в качестве процентного отношения, где 0% соответствует полностью открытому дросселю, а 100% соответствует полностью закрытому дросселю. Договоренности устанавливаются посредством установки 0% для обесточенного положения привода, которое, для дизельной реализации, является открытым для впускного дросселя LP и закрытым для клапана LP-EGR. Пунктирная линия 612 охватывает полный набор возможных положений клапана и дросселя LP-EGR. Поскольку клапан LP-EGR и впускной дроссель LP оба способны меняться из полностью закрытых в полностью открытые, пунктирная линия 612 охватывает все конфигурационное пространство. Пунктирная линия 612 имеет четыре угла, обозначенные точками 620, 622, 624 и 626. Точка 620 соответствует полностью закрытому впускному дросселю LP и полностью закрытому клапану LP-EGR. Точка 622 соответствует полностью закрытому впускному дросселю LP и полностью открытому клапану LP-EGR. Точка 624 соответствует полностью открытому впускному дросселю LP и полностью закрытому клапану LP-EGR. Точка 626 соответствует полностью открытому впускному дросселю LP и полностью открытому клапану LP-EGR.
График 630 показывает набор достижимых скоростей v1 потока LP-EGR и перепадов v2 давления LP-EGR. Ось x графика 630 представляет скорость потока LP-EGR в единицах килограммов в час. Ось y графика 630 представляет перепад давления LP-EGR в единицах гектопаскалей. Пунктирная линия 632 охватывает полный набор возможных скоростей потока LP-EGR и перепадов давления, достижимых настоящим изобретением. Пунктирная линия 632 имеет четыре угла, обозначенные точками 640, 642, 644 и 646. Каждый угол пунктирной линии 632 соответствует углу пунктирной линии 612 на графике 610. Например, точка 640 соответствует точке 620, означая, что, когда впускной дроссель LP полностью закрыт, а клапан LP-EGR полностью закрыт, скорость потока LP-EGR, v1 = 0 кг/ч, а перепад давления LP-EGR, v2 ≈ 70 гПа. Подобным образом, точка 642 соответствует положениям приводов, заданных точкой 622, точка 644 соответствует положениям приводов, заданным точкой 624, а точка 646 соответствует положениям приводов, заданным точкой 626.
Поскольку стратегия ограничения ПИ, раскрытая в материалах настоящей заявки и со ссылкой на фиг. 4 отдает приоритет отслеживанию скорости потока LP-EGR над перепадом давления LP-EGR, полезно рассматривать диапазон положений приводов и перепады давления для требуемой скорости v1* потока LP-EGR. Например, сплошная линия 615 на графике 610 является подмножеством положений приводов, соответствующих требуемой скорости потока LP-EGR, v1*=50 кг/ч. Сплошная линия 635 на графике 630 является подмножеством достижимых перепадов давления при условии ограничения достижения требуемой скорости потока LP-EGR, v1*=50 кг/ч. Минимальный перепад давления LP-EGR, v2min=12 гПа, возникает, когда положение клапана LP-EGR имеет значение u1=100%, а положение впускного дросселя LP имеет значение u2=60%. Максимальный перепад давления LP-EGR, v2max=56 гПа, возникает, когда положение впускного дросселя LP имеет значение u2=100%, а положение клапана LP-EGR имеет значение u1 ≈ 12%. Поэтому, для минимизации перепада v2 давления наряду с достижением требуемой скорости v1* потока LP-EGR, привод клапана LP-EGR сначала должен насыщаться, а затем, привод впускного дросселя LP может отслеживать скорость потока. Таким образом, контроллер может функционировать в качестве контроллера сцепленного привода.
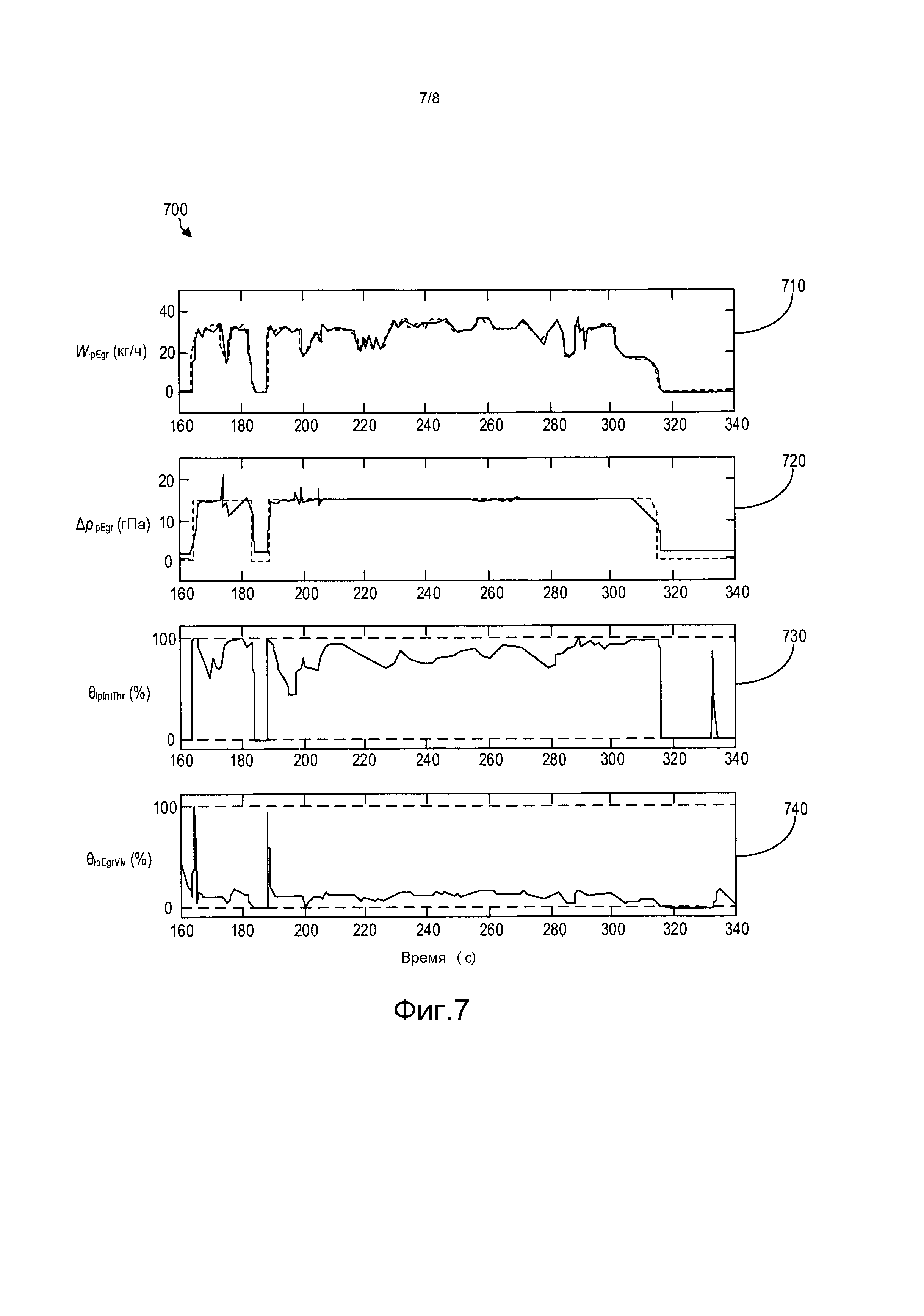
Фиг. 7 показывает набор графиков 700, иллюстрирующий функционирование контроллера LP-EGR в качестве многомерного контроллера во время ездового цикла государственной методики испытаний (FTP75) в соответствии с данным раскрытием. В частности, набор графиков 700 показывает часть ездового цикла FTP75, соответствующую второму «подъему» скорости транспортного средства во время горячей фазы ездового цикла.
График 710 показывает скорость WlpEgr потока LP-EGR со временем. Пунктирная линия на графике 710 представляет собой заданное значение WlpEgrDes скорости потока LP-EGR наряду с тем, что сплошная линия представляет собой измеренную скорость WlpEgrMeas потока LP-EGR. График 720 показывает перепад ΔplpEgr давления LP-EGR со временем. Пунктирная линия на графике 720 представляет собой заданное значение ΔplpEgrDes перепада давления LP-EGR наряду с тем, что сплошная линия представляет собой измеренный перепад ΔplpEgrMeas давления LP-EGR. Требуемый перепад давления LP-EGR, ΔplpEgrDes=15 гПа, за исключением ΔplpEgrDes=0 гПа, когда требуемая скорость потока LP-EGR, WlpEgrDes=0 кг/ч. График 730 показывает измеренное положение θlpIntThr впускного дросселя LP со временем. Положение θlpIntThr впускного дросселя LP показано в качестве процентной доли, находящейся в диапазоне от 0% до 100%, то есть, от полностью открытого до полностью закрытого. График 740 показывает измеренное положение θlpEgrVlv клапана LP-EGR со временем. Положение θlpEgrVlv клапана LP-EGR показано в качестве процентного отношения, находящегося в диапазоне от 0% до 100%, то есть, от полностью закрытого до полностью открытого.
График 710 показывает сильную корреляцию между измеренной скоростью потока LP-EGR и требуемой скоростью потока LP-EGR. Среднеквадратическая (RMS) ошибка регулирования скорости потока LP-EGR имеет значение 2,1 кг/ч. График 720 показывает сильную корреляцию между измеренным перепадом давления LP-EGR и требуемым перепадом давления LP-EGR. Измеренный перепад давления LP-EGR не способен достигать заданного значения перепада давления LP-EGR, когда заданное значение является нулевым, хотя измеренный перепад давления LP-EGR минимизирован, в то время как оба привода насыщены.
Графики 730 и 740 иллюстрируют поведение многомерного регулирования впускного дросселя 82 LP и клапана 39 LP-EGR. График 730 показывает, что впускной дроссель в основном закрыт в течение большей части цикла и полностью открывается, когда заданные значения скорости потока LP LP-EGR и перепада давления равны нулю. Среднеквадратическое отклонение положения впускного дросселя LP имеет значение 4,4%. Тем временем, клапан LP-EGR в основном закрыт в течение большей части цикла и полностью закрывается, когда заданные значения скорости потока LP-EGR и перепада давления равны нулю. Среднеквадратическое отклонение положения клапана LP-EGR имеет значение 3,6%. Эти среднеквадратические значения для ошибки регулирования скорости потока LP-EGR и отклонения положения привода значимы только по сравнению с другими результатами и, поэтому, будут дополнительно обсуждены в материалах настоящей заявки и со ссылкой на фиг. 8.
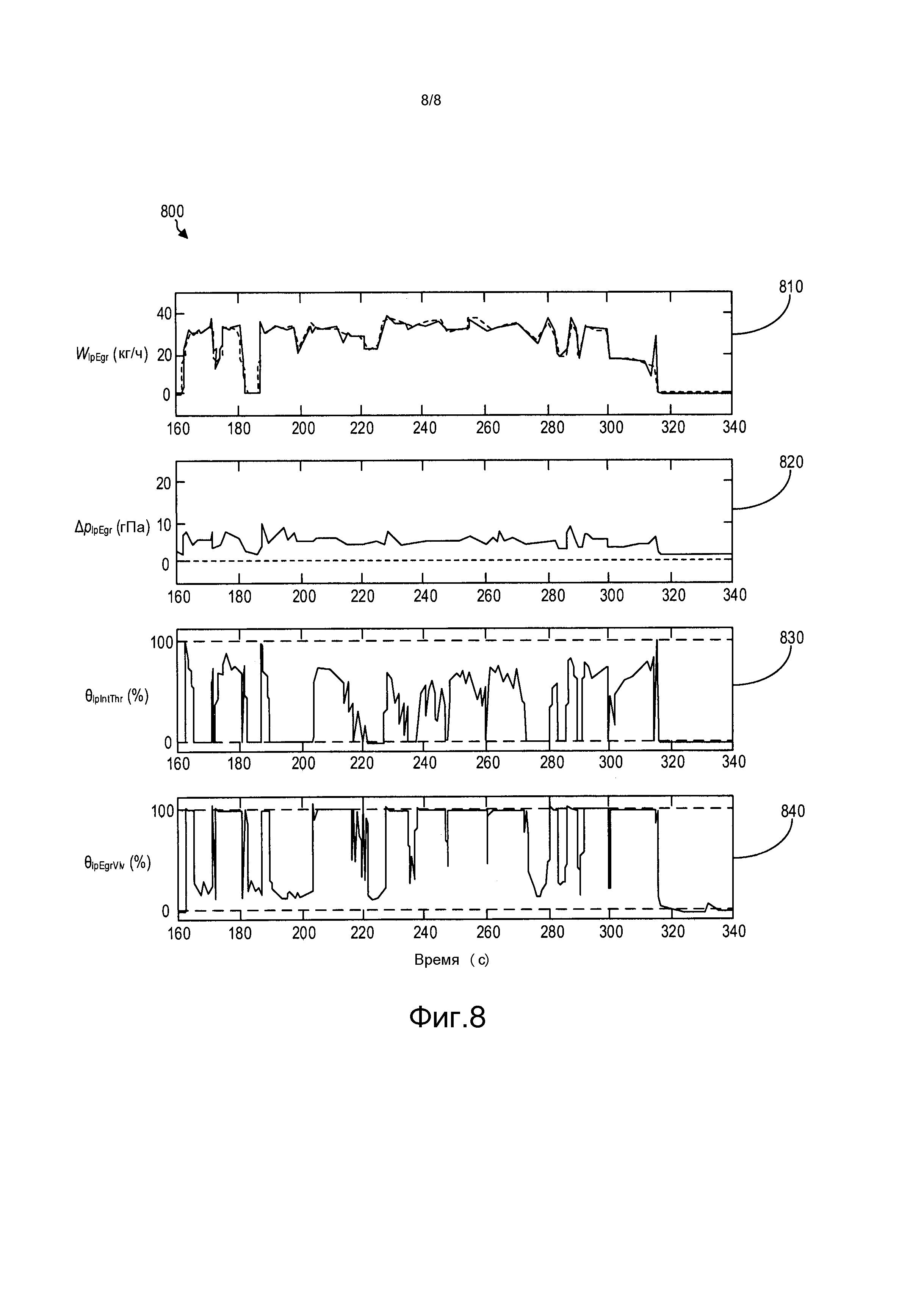
Фиг. 8 показывает набор графиков 800, иллюстрирующий функционирование контроллера LP-EGR в качестве контроллера сцепленных приводов во время ездового цикла государственной методики испытаний (FTP75) в соответствии с данным раскрытием. В частности, набор графиков 800 показывает часть ездового цикла FTP75, соответствующую второму «подъему» скорости транспортного средства во время горячей фазы ездового цикла.
График 810 показывает скорость WlpEgr потока LP-EGR со временем. Пунктирная линия на графике 810 представляет собой заданное значение WlpEgrDes скорости потока LP-EGR наряду с тем, что сплошная линия представляет собой измеренную скорость WlpEgrMeas потока LP-EGR. Траектория заданного значения скорости потока LP-EGR на графике 810 идентична траектории заданного значения скорости потока LP-EGR на графике 710 по фиг. 7. График 820 показывает перепад ΔplpEgr давления LP-EGR со временем. Пунктирная линия на графике 820 представляет собой заданное значение ΔplpEgrDes перепада давления LP-EGR наряду с тем, что сплошная линия представляет собой измеренный перепад ΔplpEgrMeas давления LP-EGR. Требуемый перепад давления LP-EGR, ΔplpEgrDes = 0 гПа на всем протяжении цикла. График 830 показывает измеренное положение θlpIntThr впускного дросселя LP со временем. Положение θlpIntThr впускного дросселя LP показано в качестве процентного отношения, находящейся в диапазоне от 0% до 100%, то есть, от полностью открытого до полностью закрытого. График 840 показывает измеренное положение θlpEgrVlv клапана LP-EGR со временем. Положение θlpEgrVlv клапана LP-EGR показано в качестве процентного отношения, находящегося в диапазоне от 0% до 100%, то есть, от полностью закрытого до полностью открытого.
График 810 показывает сильную корреляцию между измеренной скоростью потока LP-EGR и требуемой скоростью потока LP-EGR. Среднеквадратическая ошибка регулирования скорости потока LP-EGR имеет значение 2,9 кг/ч. График 820 показывает, что измеренный перепад давления ΔplpEgrMeas LP-EGR не способен достигать заданного значения перепада давления LP-EGR, ΔplpEgrDes = 0, как ожидается, хотя измеренный перепад давления LP-EGR доводится до минимума приблизительно 5 гПа.
Графики 830 и 840 иллюстрируют поведение сцепленного привода клапана 39 LP-EGR и впускного дросселя 82 LP. По меньшей мере один из приводов всегда насыщен в течение цикла. Когда один из приводов насыщается, ненасыщенный привод ответственен за отслеживание скоростью потока LP-EGR заданного значения. Следовательно, среднеквадратическое отклонение положения клапана LP-EGR имеет значение 5,7%, а среднеквадратическое отклонение положения впускного дросселя LP имеет значение 4,7%. То есть, есть повышенное отклонение привода по сравнению с результатами многомерного контроллера, показанными на фиг. 7. Повышенное отклонение привода для регулирования сцепленным приводом логически вытекает из физических знаний, основанных на интуиции. При условии более низких перепадов давления LP-EGR, клапан LP-EGR требует перемещений большей амплитуды, чтобы сказываться на эквивалентных изменениях скорости потока.
Контроллер сцепленных приводов минимизирует перепад ΔplpEgr давления LP-EGR за счет более высокой ошибки регулирования скорости WlpEgr потока LP-EGR и повышенного отклонения привода по сравнению с многомерным контроллером.
По сравнению с вариантом осуществления, перепад давления LP-EGR используется в качестве минимального значения нижнего предела. То есть, заданное значение ΔplpEgrDes перепада давления LP-EGR может устанавливаться в очень низкое значение, например, ΔplpEgrDes = 5 гПа, для того чтобы избегать пониженной устойчивости в ближайшей окрестности особой точки ΔplpEgr = 0 гПа в обратной модели объекта. Таким образом, если перепад давления находится ниже 5 гПа, то контроллер будет вести себя как многомерный контроллер и поддерживать перепад давления на 5 гПа наряду с отслеживанием заданного значения скорости потока LP-EGR. Однако, если перепад давления находится выше 5 гПа, то контроллер будет действовать в качестве контроллера сцепленных приводов, который минимизирует перепад давления, необходимый для достижения скорости потока LP-EGR, и соответствующим образом минимизирует предельный расход топлива, обусловленный насосной работой LP-EGR.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями двигателей и/или системы транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в некратковременной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в некратковременную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Способ регулирования горения при низкой температуре
Способ снижения выбросов транспортного средства (варианты) и система снижения выбросов транспортного средства
Способ (варианты) и система для определения ухудшения работы датчика nox выхлопных газов двигателя
Способ диагностирования датчика выпускной текучей среды (варианты)
Способ для двигателя (варианты) и система двигателя
Способ работы системы выпуска двигателя и система выпуска двигателя транспортного средства
Способ для дизельного двигателя с каталитическим нейтрализатором с избирательным каталитическим восстановлением (варианты)
Способ фильтрации для импульсных ультразвуковых датчиков уровня
Способ (варианты) и система диагностирования компонентов системы доочистки выхлопных газов
Способ (варианты) и система для двигателя

