Результат интеллектуальной деятельности: СПОСОБ ТУШЕНИЯ ПОЖАРА С ИСПОЛЬЗОВАНИЕМ ГРУППИРОВКИ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ
Вид РИД
Изобретение
Изобретение относится к области противопожарной техники, а именно к роботизированным средствам пожаротушения.
Наиболее близким аналогом по своей сущности является способ тушения пожара роботехническим комплексом (патент RU 2553016).
Недостатком известного способа является недостаточное количество робототехнических средств в зоне пожара, в частности на объектах типа резервуаров, что понижает эффективность пожаротушения.
Задачей изобретения является повышение эффективности доставки и размещения на наиболее ответственных позициях необходимого количества робототехнических средств пожаротушения и обеспечения их необходимым количеством огнетушащих веществ (воды, водопенных составов) при проведении пожаротушения на больших площадях, в частности в резервуарных парках хранения нефтепродуктов и сжиженных газов и снижение риска жизни и здоровья личного состава при проведении аварийно-спасательных работ и пожаротушения в условиях чрезвычайной ситуации.
Технический результат заключается в оптимизации доставки робототехнических средств пожаротушения и их эффективного применения за счет выбора наиболее удобного размещения в зоне тушения без риска для людей, возможности наращивания группировки робототехнических средств пожаротушения в зависимости от сценария операции, надежное обеспечение необходимым количеством огнетушащих веществ.
Технический результат реализуется совокупностью следующих признаков: Способ тушения пожара с использованием группировки робототехнических средств, предусматривающий их доставку в зону пожара и обеспечение необходимым количеством огнетушащего вещества, отличающийся тем, что с помощью транспортной платформы повышенной проходимости с функциями транспортера и пункта управления, осуществляют доставку в зону пожара и поочередную разгрузку на заданных позициях группировки необходимого количества малых мобильных роботов пожаротушения, которые представляют собой гусеничную или колесную платформу, с установленным на борту дистанционно управляемым съемным лафетным стволом и присоединенной к нему укладкой рукавной линии и которые в автономном режиме выдвигаются на рабочую позицию дистанционно управляемых лафетных стволов, устанавливают их стационарно, а затем осуществляют в автоматическом режиме прокладку рукавной линии от лафетных стволов к внешнему источнику подачи водопенного состава, при этом контроль за проведением всей операции осуществляют из пункта управления в зоне безопасности по радиоканалу.
Кроме того: количество мобильных роботов пожаротушения может изменяться с учетом тактической задачи в зависимости от протяженности и сложности пожара; мобильные пожарные роботы позволяют устанавливать дистанционно управляемые съемные лафетные стволы на наиболее удобных для тушения позициях без риска для человека; прокладка рукавных линий с помощью мобильных роботов и подключение к стационарным источникам подачи огнетушащих веществ, обеспечивает надежное и достаточное количество огнетушащего вещества, подающегося в зону тушения с использованием дистанционно управляемых лафетных стволов; каждый мобильный робот пожаротушения осуществляет заданную программу действий сразу после разгрузки.
Задача изобретения и технический результат связаны следующим образом: оптимизация доставки робототехнических средств пожаротушения и их эффективное применение за счет выбора наиболее удобного размещения в зоне тушения без риска для людей, возможность наращивания группировки робототехнических средств пожаротушения в зависимости от сценария операции, надежное обеспечение необходимым количеством огнетушащих веществ повышает эффективность доставки и размещения на наиболее ответственных позициях необходимого количества робототехнических средств пожаротушения и обеспечения их необходимым количеством огнетушащих веществ (воды, водопенных составов) при проведении пожаротушения на больших площадях, в частности в резервуарных парках хранения нефтепродуктов и сжиженных газов и снижение риска жизни и здоровья личного состава при проведении аварийно-спасательных работ и пожаротушения в условиях чрезвычайной ситуации.
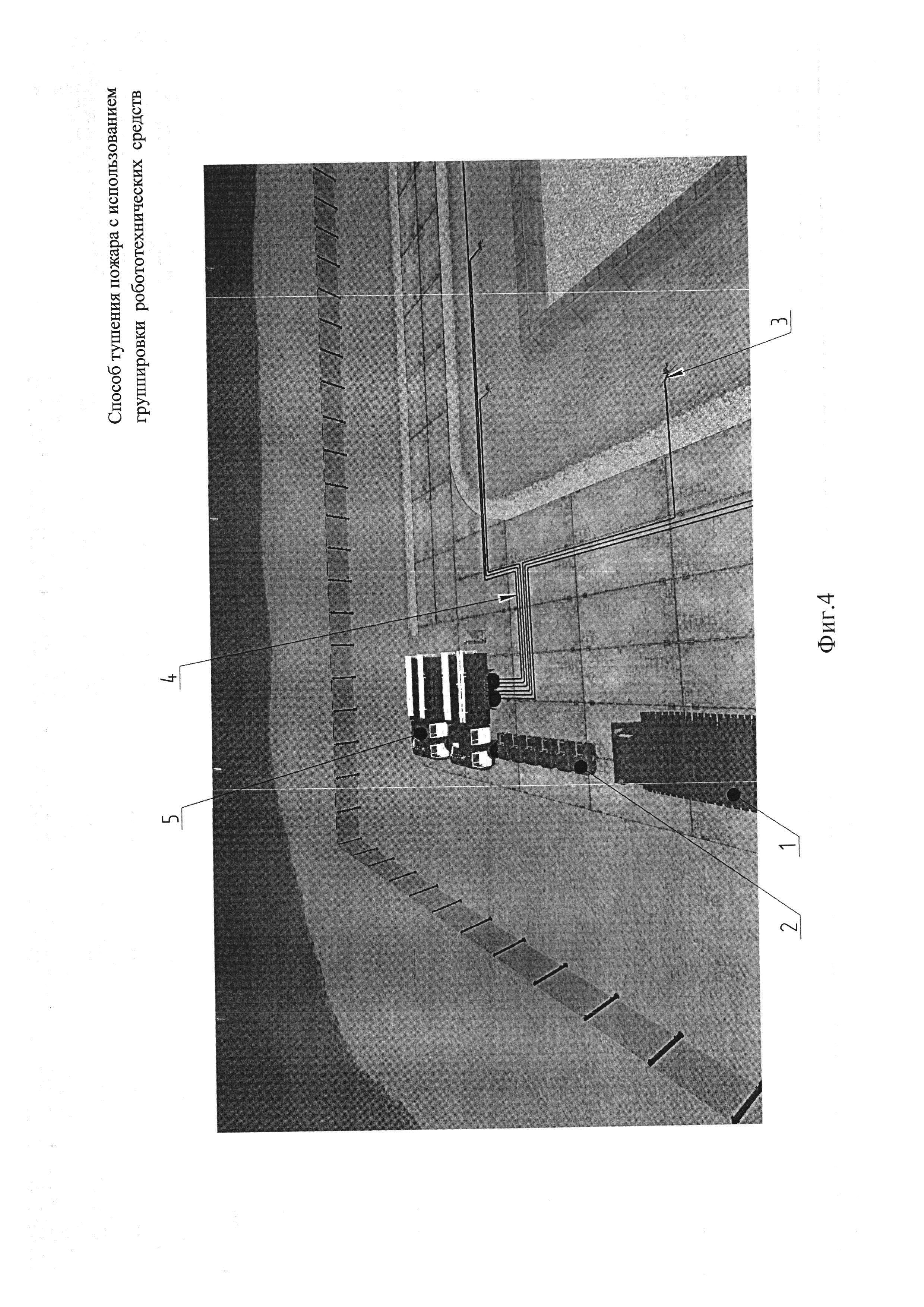
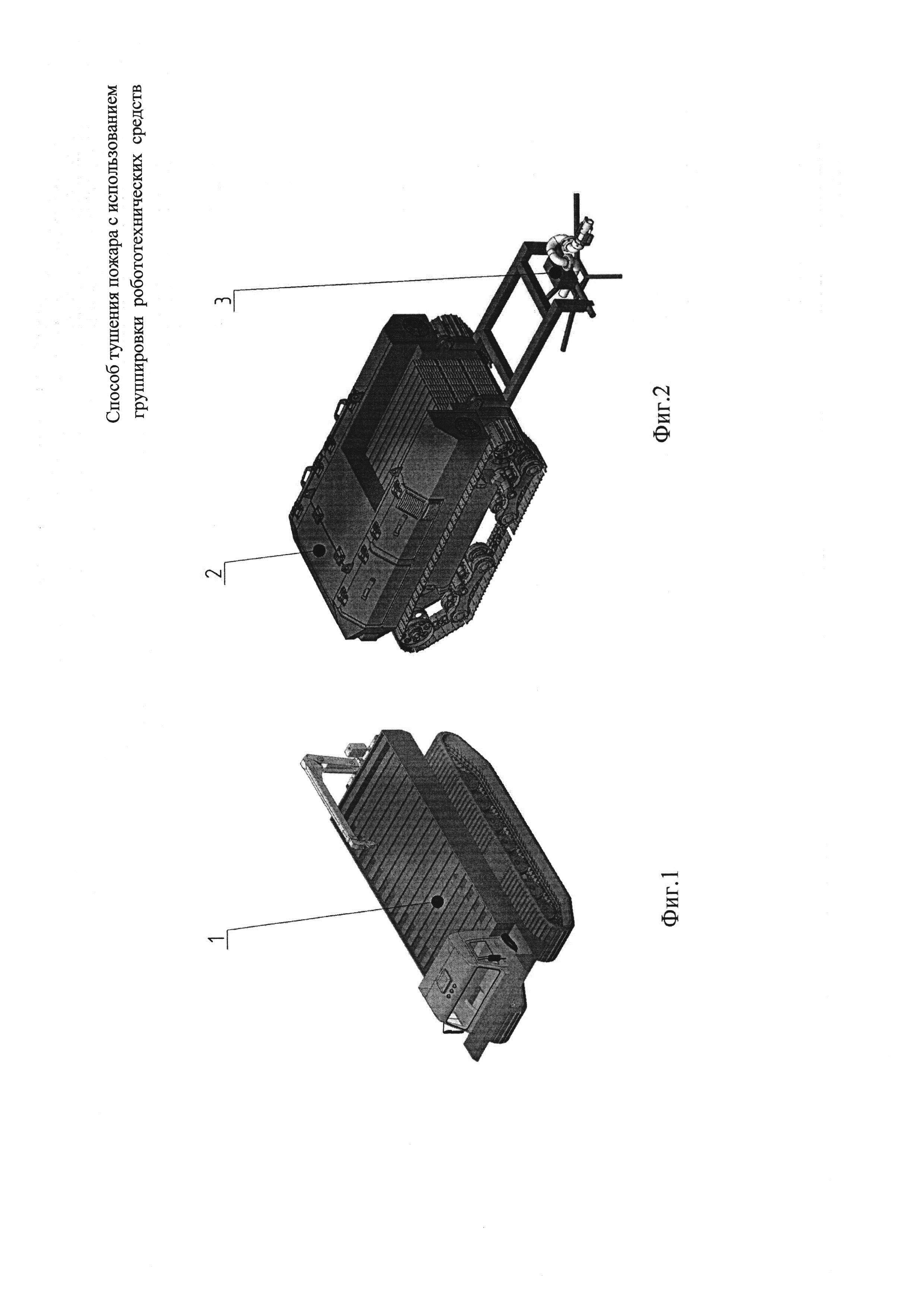
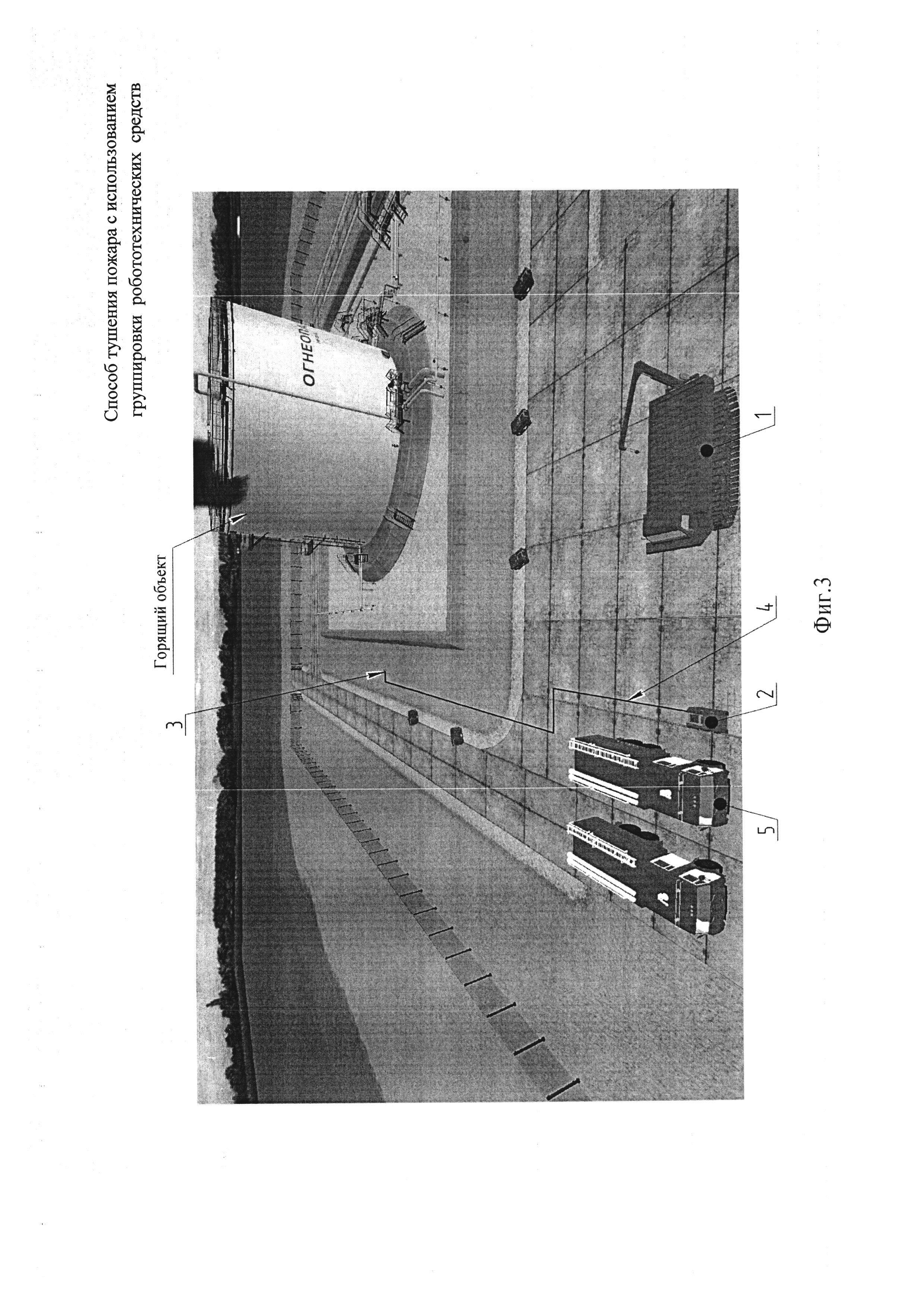
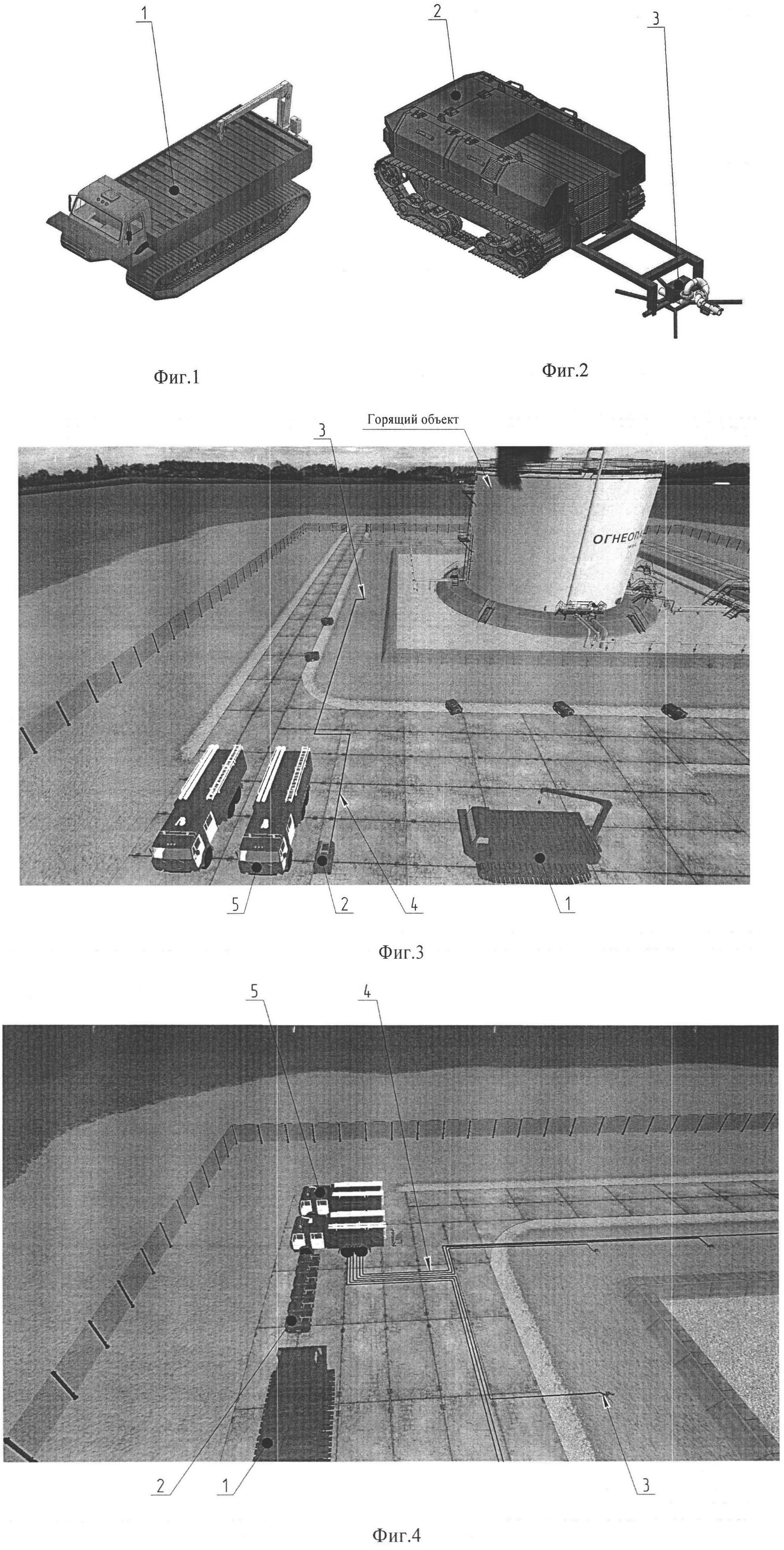
На чертежах: на фиг. 1 изображена мобильная платформа для доставки мобильных роботов, на фиг. 2 изображен мобильный робот пожаротушения в процессе установления лафетного ствола, на фиг. 3 изображена система подготовки и тушения горящего резервуара группировкой роботехнических средств пожаротушения, на фиг. 4 изображена заключительная стадия подготовки и тушения группировкой роботехнических средств пожаротушения.
Тушение пожаров на резервуарах с горючими жидкостями является сложной тактической и технической задачей. Одним из эффективных способов борьбы с такими авариями является использование лафетных стволов, с помощью которых возможна подача низкократной пены в очаг открытого горения и охлаждения стенок резервуара водой для предотвращения его разрушения.
В целях снижения риска личного состава работающего с лафетными стволами в непосредственной близости от аварийного резервуара предлагается максимально автоматизировать этот процесс использованием комплекса в составе группировки робототехнических средств пожаротушения.
Комплекс состоит из транспортной платформы 1 повышенной проходимости, выполняющий функцию транспортера со средством разгрузки (фиг. 1) и пункта управления группировки мобильных роботов пожаротушения 2 и дистанционно управляемых съемных лафетных стволов 3.
В случае развития пожара транспортная платформа 1 выдвигается в позиционный район и производит поочередную разгрузку мобильных роботов 2. Количество мобильных роботов 2 определяется тактическими особенностями ликвидации пожара на конкретном объекте (фиг. 3).
Мобильный робот пожаротушения 2 представляет собой гусеничную или колесную платформу автономного управления, на борту которой установлен дистанционного управляемый съемный лафетный ствол 3 (фиг. 2) и присоединенная к нему укладка рукавной линии 4.
Каждый мобильный робот 2 пожаротушения после разгрузки с транспортной платформы 1 по команде оператора доставляет и стационарно устанавливает дистанционно управляемый съемный лафетный ствол 3 на исходный рубеж пожаротушения. К лафетному стволу 3 присоединен пожарный рукав 4, скатки которого уложены на мобильном роботе 2. (фиг. 2-4)
После установки дистанционно управляемого лафетного ствола 3 в заданной точке мобильный робот 2 в автономном режиме выдвигается к месту подключения рукавной линии 4 к внешнему источнику подачи водопенного состава, например, пожарному автомобилю 5, производя при этом раскладку рукавной линии 4 (фиг. 3, 4)
В это время транспортная платформа 1 разгружает необходимое количество мобильных роботов 2, которые начинают действовать по приведенному выше алгоритму. После разгрузки всех мобильных роботов 2 транспортная платформа 1 выдвигается в безопасное место (фиг. 3, 4).
После подключения необходимого количества лафетных стволов 3 к источнику, когда все мобильные роботы 2 завершат раскладку рукавных линий 4, производится процесс пожаротушения или охлаждения резервуара, управление которым производится из пункта управления в зоне безопасности по радиоканалу. Мобильные роботы занимают место для загрузки, (фиг. 4) После завершения пожаротушения производится уборка рукавных линий с использованием традиционных способов, принятых в пожарной охране.
Таким образом, предлагаемый способ тушения пожара группировкой робототехнических средств реализуется и обладает повышенной эффективностью доставки робототехнических средств и пожаротушения, в частности резервуаров с горючими и высокотоксичными материалами.
Использование предлагаемого технического решения повышает расширяет функциональные возможности мобильного робототехнического комплекса и обеспечивает возможность пожаротушения и проведения пожарно-спасательных операций в условиях, связанных с высоким риском для жизни и здоровья личного состава, в том числе в зоне высокотоксичного, взрывоопасного и химически радиационного поражения.
Способ снижения динамической нагруженности транспортного средства при движении по поверхности и транспортное средство
Аппарат на воздушной подушке с наземным движителем
Способ группового управления мобильными наземными и воздушными робототехническими средствами
Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения
Гидросамолёт
Тепловой химический источник тока

