Результат интеллектуальной деятельности: Имитатор вентрикулоскопа
Вид РИД
Изобретение
Изобретение относится к области медицины, к устройству, имитирующему реальный нейрохирургический инструмент - вентрикулоскоп. Имитатор вентрикулоскопа может быть использован в медицинских тренажерах нейрохирургии, при моделировании виртуального медицинского вмешательства, где хирург проводит тренировочную хирургическую операцию в моделируемой среде, оперируя имитаторами медицинских нейрохирургических инструментов подобными реальным инструментам.
Известен патент RU 154843 U1, опубликован 10.09.2015 г., «Механизм генерации усилия на имитатор медицинского инструмента», в котором описывается имитатор медицинского инструмента, используемый совместно с механизмом отслеживания инструмента в медицинских тренажерах эндоскопической хирургии. Имитатор медицинского инструмента содержит имитатор тубуса с магнитами внутри и рукоятки. Имитатор тубуса с магнитами внутри устанавливается в механизм отслеживания инструмента, внутри линейного электромагнитного двигателя, который обеспечивает генерацию силовой обратной связи и отслеживание инструмента вдоль оси тубуса. Механизм генерации усилия позволяет отслеживать и генерировать усилие на имитатор медицинского инструмента по трем осям свободы. Недостатком имитатора медицинского инструмента является то, что его невозможно применить для имитации нейрохирургического вмешательства, в частности имитации вентрикулоскопии, поскольку в нейрохирургии используются другие медицинские инструменты.
Вентрикулоскопия (Ventriculoscopy) исследование желудочков мозга с помощью волоконнооптических приборов.
Вентрикулоскоп (вентрикуло- + греч. Skopeo рассматривать) эндоскоп, предназначенный для осмотра желудочков головного мозга и выполнения диагностических и лечебных манипуляций.
Внутричерепные эндоскопические вмешательства на взрослых и детях проводятся с помощью вентрикулоскопа и операционного инструмента для нейрохирургии. Вентрикулоскоп обеспечивает визуальное наблюдение, аспирацию и ирригацию жидкостей, и доступ для операционного инструмента в область хирургического вмешательства. Известный уровень техники характеризуется механизмами, используемыми в тренажерах эндоскопической хирургии, позволяющими отслеживать положение имитаторов медицинских инструментов, подобных инструментам, используемым в эндоскопии, преимущественно в лапароскопии. Подобные имитаторы медицинских инструментов не могут быть использованы для проведения тренировочных операций нейрохирургии, ввиду их отличия от медицинских инструментов, используемых в нейрохирургии.
Технической задачей настоящего изобретения является создание имитатора медицинского инструмента - вентрикулоскопа, для использования в медицинских тренажерах нейрохирургии.
Имитатор вентрикулоскопа, согласно изобретению, содержит корпус, имитатор тубуса, соединенный с корпусом, и выполненный в виде полого цилиндра с магнитами внутри, краны аспирации и ирригации, установленные на корпусе, с датчиками положения, линейный электромагнитный двигатель, установленный в корпусе, с якорем, при этом якорь линейного электромагнитного двигателя содержит захват имитатора эндоскопического инструмента. Захват имитатора эндоскопического инструмента выполнен в виде цангового зажима и содержит основание, цангу, закрепленную на основании, втулку, которая поджимает цангу пружиной.
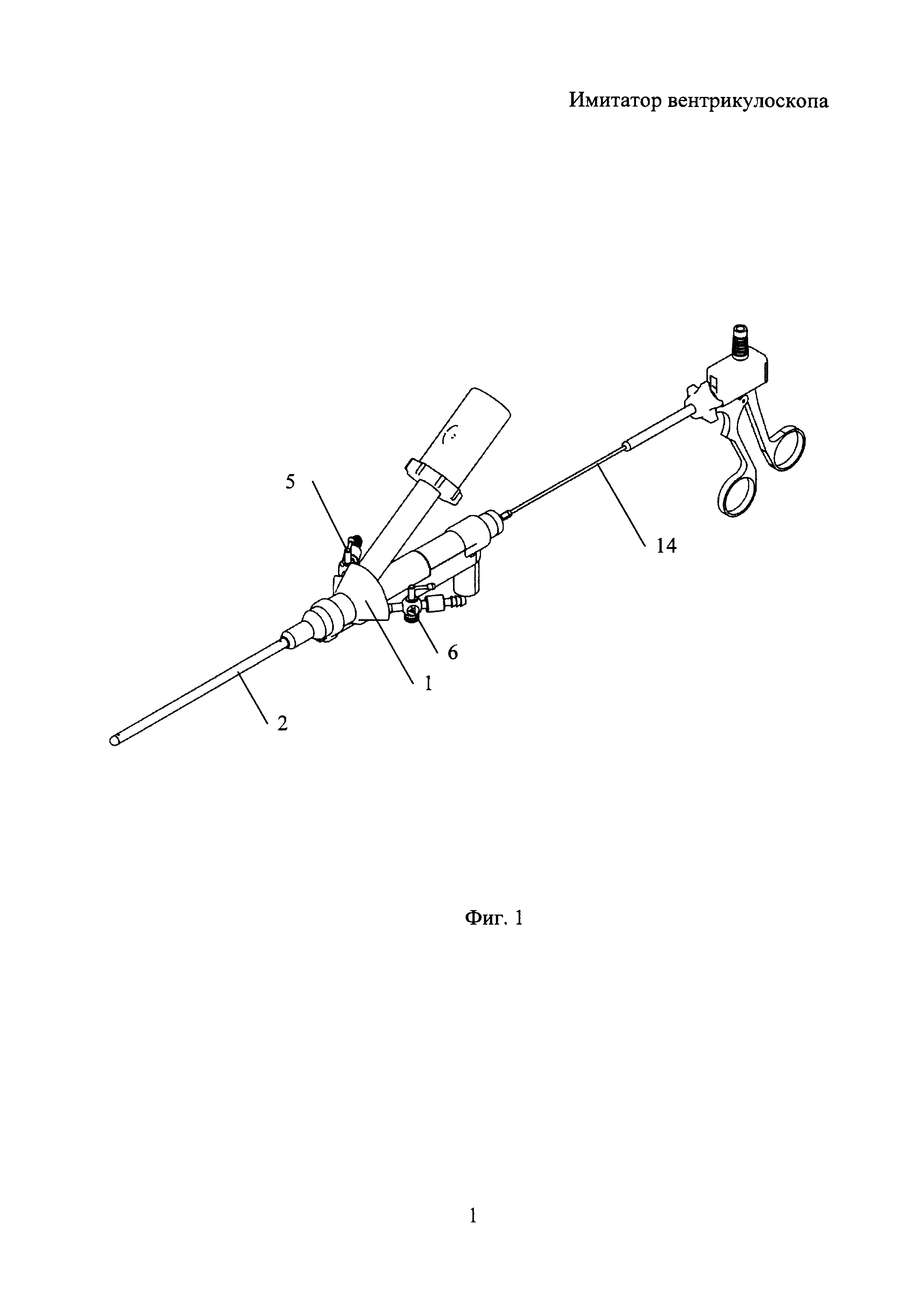
На фиг. 1 изображен общий вид имитатора вентрикулоскопа с установленным имитатором эндоскопической видеокамеры и имитатором эндоскопического инструмента.
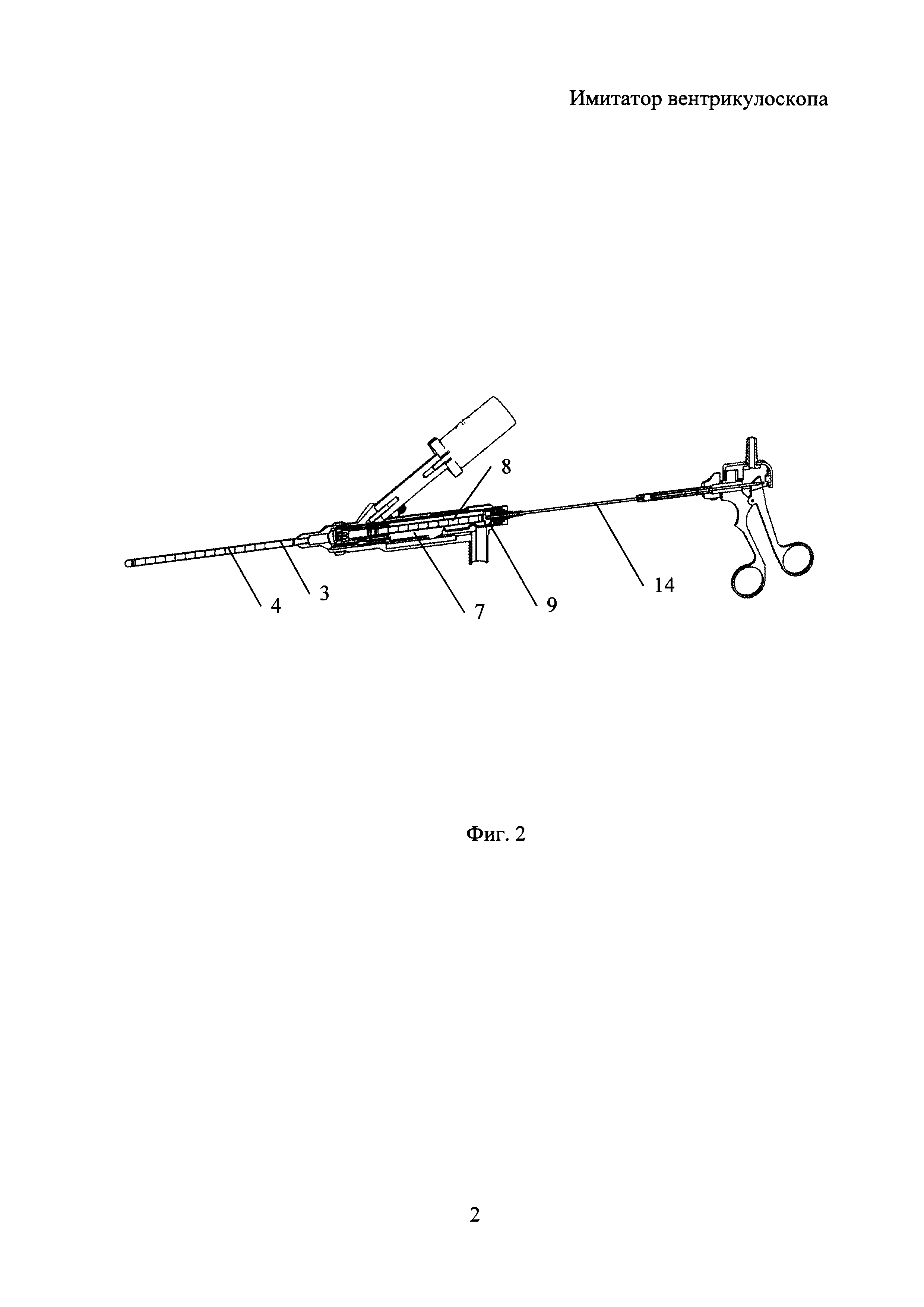
На фиг. 2 изображен имитатор вентрикулоскопа с установленным имитатором эндоскопического инструмента в разрезе.
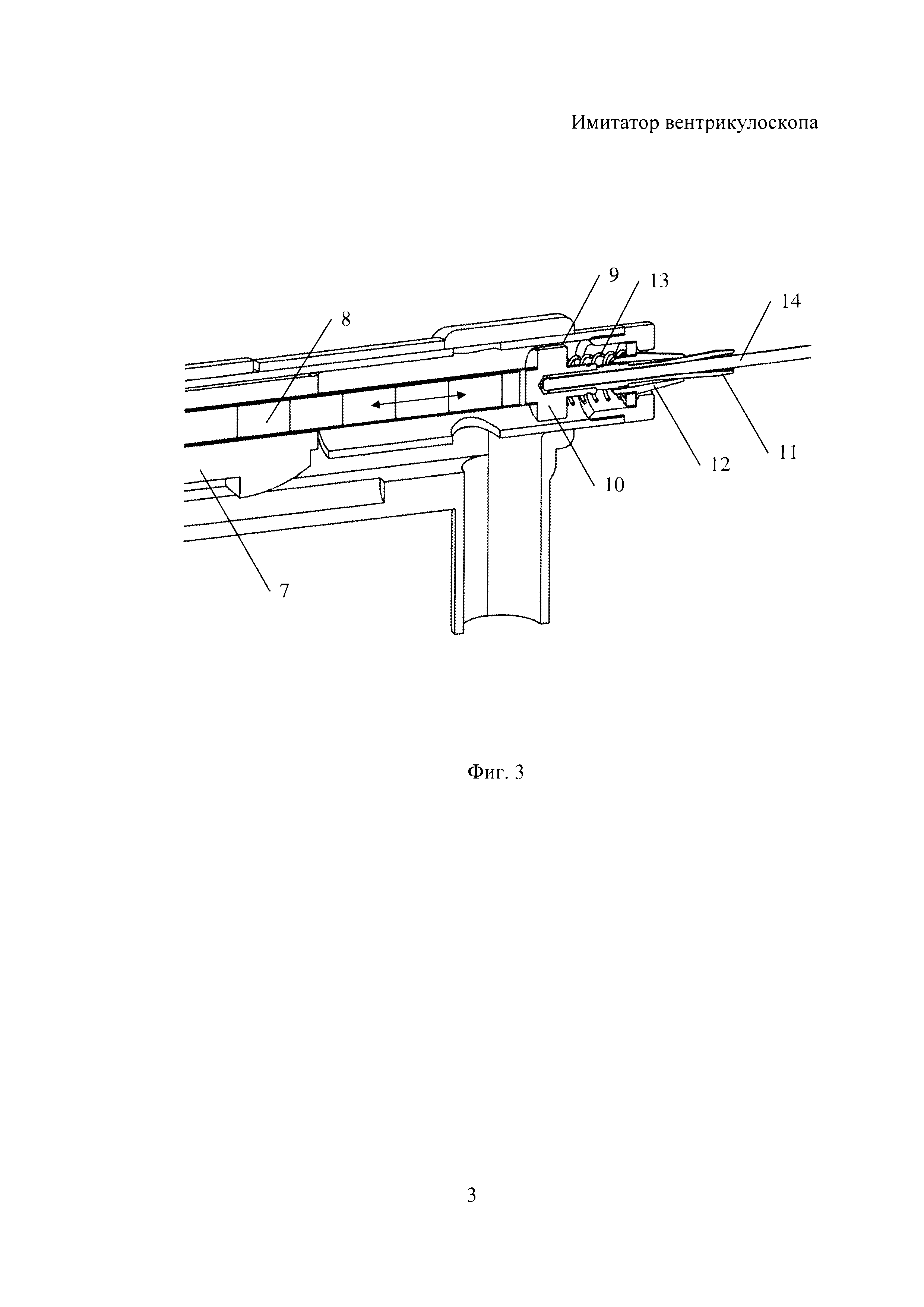
На фиг. 3 изображен захват эндоскопического инструмента.
Имитатор вентрикулоскопа (фиг. 1) содержит корпус 1, имитатор тубуса 2, соединенный с корпусом 1, и выполненный в виде полого цилиндра 3 с магнитами 4 внутри (фиг. 2). Имитатор тубуса 2 является якорем линейного электромагнитного двигателя и может использоваться в механизме генерации усилия, который описан в патенте RU 154843 U1. Механизм генерации усилия, согласно RU 154843 U1, используется для отслеживания положения и генерации силовой обратной связи на имитатор медицинского инструмента. Краны аспирации 5 и ирригации 6 с датчиками положения (не показаны), установлены на корпусе 1. Внутри корпуса 1 установлен линейный электромагнитный двигатель 7 с якорем 8. Якорь 8 содержит захват 9 имитатора эндоскопического инструмента 14 (фиг. 2).
Захват 9 имитатора эндоскопического инструмента 14 выполнен в виде цангового зажима и содержит основание 10, цангу 11, закрепленную на основании 10, втулку 12, которая поджимает цангу при помощи пружины 13 (фиг. 3). Цанга захватывает имитатор эндоскопического инструмента 14, таким образом, имитатор эндоскопического инструмента 14 перемещается вместе с якорем 8 во время работы. При перемещении якоря 8 происходит отслеживание его перемещения линейным электромагнитным двигателем, таким образом, при работе, вместе с якорем 8 отслеживается перемещение имитатора эндоскопического инструмента 14.
Датчики положения кранов аспирации 5 и ирригации 6 могут быть выполнены на основе датчиков магнитного поля (датчик Холла), при этом датчик магнитного поля устанавливается в кране, а магнит прикрепляется к подвижной части крана. При открытии или закрытии крана положение магнита, относительно датчика магнитного поля, изменяется, что фиксирует датчик.
Датчики положения кранов аспирации 5 и ирригации 6 и линейный электромагнитный двигатель 7 соединены с блоком управления (не показано), выполненным на основе микропроцессора.
Блок управления принимает сигналы с датчиков положения кранов аспирации 5 и ирригации 6 и передает их в программное обеспечение тренажера. На основе этих сигналов программное обеспечение регулирует поток жидкостей в виртуальном пространстве при моделировании тренировочной хирургической операции.
Блок управления принимает от программного обеспечения тренажера сигналы для генерации силовой обратной связи на имитатор эндоскопического инструмента 14 и передает их на линейный электромагнитный двигатель 7, а так же передает сигнал о положении якоря 8 линейного электромагнитного двигателя 7 и, соответственно, положение имитатора эндоскопического инструмента 14 в программное обеспечение тренажера.
Рассмотрим имитатор вентрикулоскопа в работе.
Тренировочная хирургическая операция вентрикулоскопии содержит два основных этапа работы с медицинскими инструментами. Как и при реальной операции, на первом этапе осуществляется доступ к операционному полю, при этом врач, манипулируя вентрикулосокопом, устанавливает его в нужной позиции, для оптимального обзора операционного поля, после чего неподвижно закрепляет его. На втором этапе врач, устанавливает эндоскопический инструмент в вентрикулоскоп и, манипулируя им, осуществляет необходимые хирургические действия.
Имитатор вентрикулоскопа устанавливается в механизм генерации усилия (не показан), описанный в патенте RU 154843 U1, при этом имитатор тубуса 2 устанавливается внутри линейного электромагнитного двигателя механизма. Имитатор тубуса 2 выполнен в виде полого цилиндра 3 с постоянными магнитами 4 внутри, и является якорем линейного электромагнитного двигателя механизма. Механизм генерации усилия отслеживает положение имитатора вентрикулоскопа по трем осям свободы (XYZ), и передает сигналы о положении в блок управления (не показан). На основе этих сигналов программное обеспечение тренажера синхронизирует положение вентрикулоскопа в виртуальном пространстве, то есть врач наблюдает виртуальную картину органа (мозга) которая отображается в системе визуализации тренажера и зависит от действий врача и его манипуляций с имитатором вентрикулоскопа, подобно реальной нейрохирургической операции.
В процессе тренировочной хирургической операции врач с помощью имитаторов кранов аспирации 5 и ирригации 6 регулирует подачу и отсос жидкостей в виртуальном операционном поле. При этом сигналы с датчиков положения кранов аспирации 5 и ирригации 6 обрабатываются блоком управления и передаются в программное обеспечение тренажера, где используются для моделирования аспирации и ирригации жидкости в виртуальном пространстве операционного поля.
При достижении операционного поля имитатор вентрикулоскопа неподвижно фиксируется, например, с помощью кронштейна. Далее врач действует имитатором эндоскопического инструмента.
Имитатор эндоскопического инструмента 14 устанавливается в имитатор вентрикулоскопа. Для этого блок управления подает сигнал на линейный электромагнитный двигатель 7 для смещения якоря 8 вместе с захватом 9 имитатора эндоскопического в крайнее положение. При этом втулка 12 упирается в ограничитель (не показан), якорь 8 с основанием 10 сжимает пружину 13, а цанга 11 смещается относительно втулки 12 и раскрывается для захвата имитатора эндоскопического инструмента 14. Врач устанавливает имитатор эндоскопичекого инструмента 14 в цангу 11, которая захватывает его при смещении якоря 8 в рабочее положение. Таким образом, имитатор эндоскопического инструмента 14 фиксируется захватом 9 и перемещается вместе с якорем 8 в процессе работы, линейный электромагнитный двигатель 7 отслеживает положение якоря 8 и генерирует усилие обратной связи на имитатор эндоскопического инструмента 14 в соответствии с программным алгоритмом (например, при столкновении эндоскопического инструмента со стенкой органа в виртуальном пространстве). Сигналы о положении якоря 8 и, соответственно, положения имитатора эндоскопического инструмента 14 принимаются блоком управления и используются в программном обеспечении тренажера для синхронизации с положением инструмента в виртуальном пространстве.
Предлагаемая конструкция имитатора вентрикулоскопа позволяет использовать его для проведения тренировочных нейрохирургических операции в тренажерах моделирующих хирургическую операцию в виртуальном пространстве. Возможность генерации силовой обратной связи на имитатор вентрикулоскопа и имитатор эндоскопического инструмента с помощью линейного электромагнитного двигателя позволяет сгенерировать усилие, при взаимодействии инструментов с тканями органов в виртуальном пространстве, подобное усилию, возникающему при проведении реальной нейрохирургической операции.
Способ отработки практических навыков аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и диагностике различных видов патологий сердца с помощью медицинского тренажера
Способ отработки практических навыков аускультации с помощью медицинского тренажера
Медицинский тренажер для отработки практических навыков аускультации
Способ работы медицинского тренажера для отработки практических навыков аускультации
Тренажер хирургической операционной
Привод для генерации обратной тактильной связи на инструмент по усилию
Механизм генерации усилия на имитатор медицинского инструмента
Способ повышения точности позиционирования промышленного робота
Манипулятор
Способ отработки практических навыков аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и аускультации с помощью медицинского тренажера
Способ отработки практических навыков по оказанию первой медицинской помощи и диагностике различных видов патологий сердца с помощью медицинского тренажера
Способ отработки практических навыков аускультации с помощью медицинского тренажера

