Результат интеллектуальной деятельности: Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления
Вид РИД
Изобретение
Предлагаемые способ и устройство относятся к испытательной технике, а именно, к оборудованию для проведения модальных испытаний элементов конструкций космического назначения, рассчитанных на работу в невесомости.
Известны теория и методики проведения модальных испытаний, например, В. Хейлен, С. Ламменс, П. Сас, «Модальный анализ: теория и испытания», перевод под ред. д.т.н. В.И. Смыслова, изд ООО «Новатест», 2008 г.
Модальные испытания, результатом которых являются модальные параметры (формы собственных мод колебаний, их частоты, и демпфирования) являются обязательным условием при разработке таких конструкций. При этом возникает необходимость имитации состояния невесомости, поскольку напряженное состояние, создаваемое весовыми нагрузками, может существенно повлиять на точность определения модальных параметров. В свою очередь, ошибки в определении указанных параметров могут отразиться на корректности работы космического аппарата.
В качестве прототипа предлагаемого способа выбран способ имитации пониженной гравитации движущегося объекта (патент RU 2410299 C1, G01M 99/00, от 19.01.2011), реализуемый следующим образом: под испытуемым движущимся объектом располагается кинематически развязанная со следящей приводной системой движущаяся площадка, создающая вертикальную разгружающую силу испытываемому объекту посредством воздушной подушки с избыточным давлением или посредством взаимодействия одноименных полюсов магнитов, расположенных на испытуемом объекте и площадке.
Недостатком способа, реализованного в устройстве, является отсутствие степени свободы перемещения испытываемого объекта по вертикали и невозможность с его помощью обеспечить нормированное силовое воздействие для возбуждения колебаний.
Известно устройство (патент RU 2299840 C1, G01M 17/00, от 20.09.2005), предназначенное для пассивного обезвешивания конструкций при проведении модальных испытаний. Подвеска сегмента осуществляется сверху при помощи тросового ванта. Недостатками этого и аналогичных способов (а.с. SU 1467118 A1, G01M 13/02, от 23.03.1989; патент US 5110294 от 05.05.1992) являются необходимость сооружения специальных высоких стапелей, необходимых при использовании вантов подвески, длина которых будет достаточна для увода частоты горизонтальных маятниковых колебаний за пределы частотного диапазона испытаний и необходимость точной настройки на заданную весовую нагрузку. Помимо этого, все указанные способы и устройства обезвешивания не обеспечивают силовое воздействие для возбуждения колебаний.
Известно устройство имитации невесомости (патент US 4860600, B64G 07/00, от 29.08.1989), содержащее двухкомпонентную кинематическую платформу, обеспечивающую две горизонтальные степени свободы по перемещению, на которой закреплена сферическая аэростатическая опора, обеспечивающая вращательные степени свободы закрепленному на ней объекту.
Недостатком устройства является отсутствие степени свободы перемещения испытываемого объекта по вертикали и невозможность с его помощью обеспечить нормированное силовое воздействие для возбуждения колебаний.
Известно также «Устройство для обезвешивания элементов» (патент SU 1828261 А1, G01M 19/00, от 20.09.1996). Устройство содержит шестистепенное газостатическое устройство подвеса, включающее сферическую газостатическую опору, плоскую газостатическую опору, подпятник которой находится в камере с газом, и следящую систему по поддерживанию заданного давления газа, в которую входят последовательно соединенные датчик давления, блок управления и исполнительный орган по регулировке давления; три следящие системы, обеспечивающие перемещение шестистепенного газостатического устройства подвеса соответственно по вертикали и в плоскости горизонта.
Недостатком данного устройства является сложность, инерционность управлениея пневмоприводом и невозможность с его помощью обеспечить нормированное силовое воздействие для возбуждения колебаний легких конструкций.
В качестве прототипа предлагаемого устройства выбран «Трехкомпонентный вибростенд» (патент RU 2411482 С2, G01M 07/06, от 15.09.2008), содержащий три платформы для размещения испытуемого объекта и систему возбуждения колебаний, каждая из платформ закреплена с возможностью перемещения только ортогонально направлениям перемещения двух других. Усилия от вибровозбудителя передаются платформам при помощи шарнирных тяг, выполненных с узлами крепления тяг к платформам и вибровозбудителям в виде карданного подвеса.
Недостатком устройства является невозможность с его помощью обеспечить статическое вертикальное усилие для обезвешивания объекта испытаний и нормированное силовое воздействие для возбуждения колебаний при больших ходах штоков вибровозбудителей на низких частотах колебаний.
Задачей изобретения является разработка способа и устройства для его осуществления, обеспечивающих статическое вертикальное усилие для обезвешивания объекта испытаний, нормированное трехкоординатное переменное силовое воздействие для поддержания возбужденных колебаний большой амплитуды и снятие ограничений по степеням свободы таких колебаний.
Указанная задача решается тем, что предлагается способ обезвешивания и возбуждения колебаний при модальных испытаниях, включающий процедуру обезвешивания и процедуру возбуждения вынужденных колебаний, отличающийся тем, что совмещают функцию формирования вертикальной статической силы, компенсирующей заданную часть веса конструкции или ее сегмента и функцию формирования переменного вектора силы, возбуждающей колебания, при этом для обеспечения необходимого размаха колебаний разделяют функцию силового воздействия и функцию кинематического сопровождения точки приложения вектора силы при перемещениях конструкции в процессе колебаний, причем функцию кинематического сопровождения осуществляют независимые управляемые кинематические платформы, каждая в своем направлении, а функцию нормированного силового воздействия реализуют независимые линейные электродинамические силовозбудители, размещенные на кинематических платформах.
Устройство для осуществления способа имеет в своем составе источник тока управляемый контроллером по цифровой магистрали и формирующий заданные переменные токи в три ортогонально размещенных линейных электродинамических силовозбудителя со свободным ходом якорей в осевых направлениях, кроме того, имеет в составе три независимые кинематические платформы, способные под управлением контроллера с необходимой скоростью перемещать размещаемые на них электродинамические силовозбудители в направлениях, соосных ходу их якорей. Электродинамические силовозбудители дополнительно снабжены датчиками положения якорей относительно статоров, выходы которых поданы на вход контроллера, управляющего движением каждой платформы таким образом, что в любой момент времени минимизируется отклонение от среднего положения якоря силовозбудителя соответствующего направления относительно его статора, при этом в процессе работы устройства якорь каждого силовозбудителя по координате своей оси остается квазинеподвижным по отношению к статору и подвижному элементу своей платформы, формируя задаваемую током компоненту результирующей силы, воздействующую на объект через линейные подшипники, подвижный силовой элемент и шарнирное соединение. Для реализации функции обезвешивания, ток в якоре силовозбудителя вертикального направления задается контроллером как сумма постоянной и переменной компоненты, обеспечивая одновременное формирование постоянной вертикальной силы компенсации веса и переменной вертикальной компоненты силы, которая в сумме с переменными горизонтальными компонентами обеспечивает формирование заданного вектора силы, возбуждающего вынужденные колебания конструкции на заданной моде.
Сущность предложенного способа заключается в следующем. В ходе модальных испытаний для возбуждения и изоляции каждой моды колебаний необходимо имитировать состояние невесомости, то есть обезвесить конструкцию, причем сила компенсации веса существенно, иногда на несколько порядков, превышает знакопеременную (например, синусоидальную) силу, прилагаемую к конструкции для возбуждения колебаний. Технология испытаний также требует, чтобы в процессе ускоренного перемещения объекта под воздействием возбуждающей силы, сама эта сила не зависела от пространственного положения точки ее приложения, сопровождая последнюю в процессе перемещения объекта по форме колебания. Существенно, что амплитуды перемещений для разных мод колебаний могут быть значительными (от долей до десятков сантиметров), характерные частоты в диапазоне 0,1-10 Гц. Пассивные средства обезвешивания, например, вантовые или рычажные подвески, не обеспечивают необходимые степени свободы перемещения объекта и существенно искажают результаты испытаний. Кроме того, их применение подразумевает, что в процессе испытаний для возбуждения колебаний будут использованы отдельные устройства, воздействующие на объект в дополнительных точках, что не всегда возможно из-за особенностей испытываемой конструкции. Как правило, это линейные электродинамические возбудители, с токовым управлением. Ход штока таких возбудителей конструктивно ограничен и не всегда обеспечивает необходимые амплитуды перемещения точки приложения силы. Известно, что в линейном электродинамическом силовозбудителе сила определяется соотношением:
F = к BLIN,
где
I - ток;
к - коэффициент пропорциональности, определяемый единицами измерения;
В - магнитная индукция в зазоре магнитопровода статора;
L - длина проводника одного витка катушки якоря;
N - число витков в зазоре магнитопровода.
Это соотношение, однако, определяет строгую пропорциональность силы заданному току только в случае, если катушка якоря неподвижна в зазоре магнитопровода статора. Но, во-первых, из-за неоднородности магнитного потока по длине зазора магнитопровода сила при заданном токе зависит от положения катушки в зазоре и может существенно меняться при ее движении. Во-вторых, при движении якоря относительно статора в металлических частях якоря наводятся паразитные токи, которые, взаимодействуя с магнитным потоком, приводят к появлению неконтролируемой добавки к задаваемой силе, пропорциональной относительной скорости якоря и статора, создавая, тем самым, эффект вязкого трения, существенно влияющего на точность определения модальных параметров. Предлагаемый способ позволяет минимизировать перемещение якорей линейных двигателей относительно их статоров путем размещения статоров на координатно ориентированных кинематических платформах, перемещения которых по сигналам от соотвествующих датчиков положения покоординатно отслеживают перемещение точки приложения силы на объекте. Тем самым достигается необходимая точность задания суммарного вектора силы, позволяющая совместить функцию компенсации статического усилия по вертикальной координате и функцию возбуждения колебаний произвольно направленным переменным вектором силы.
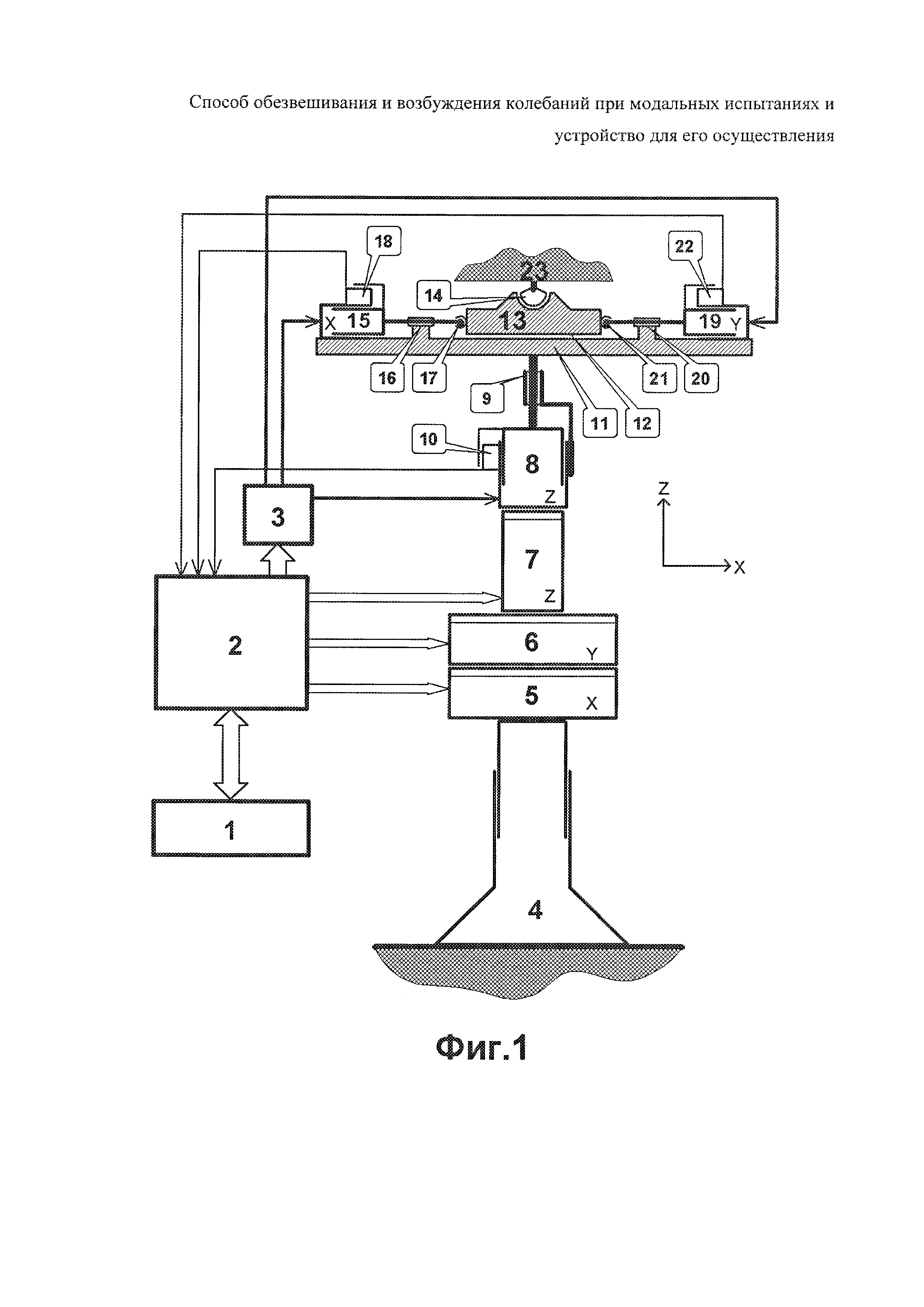
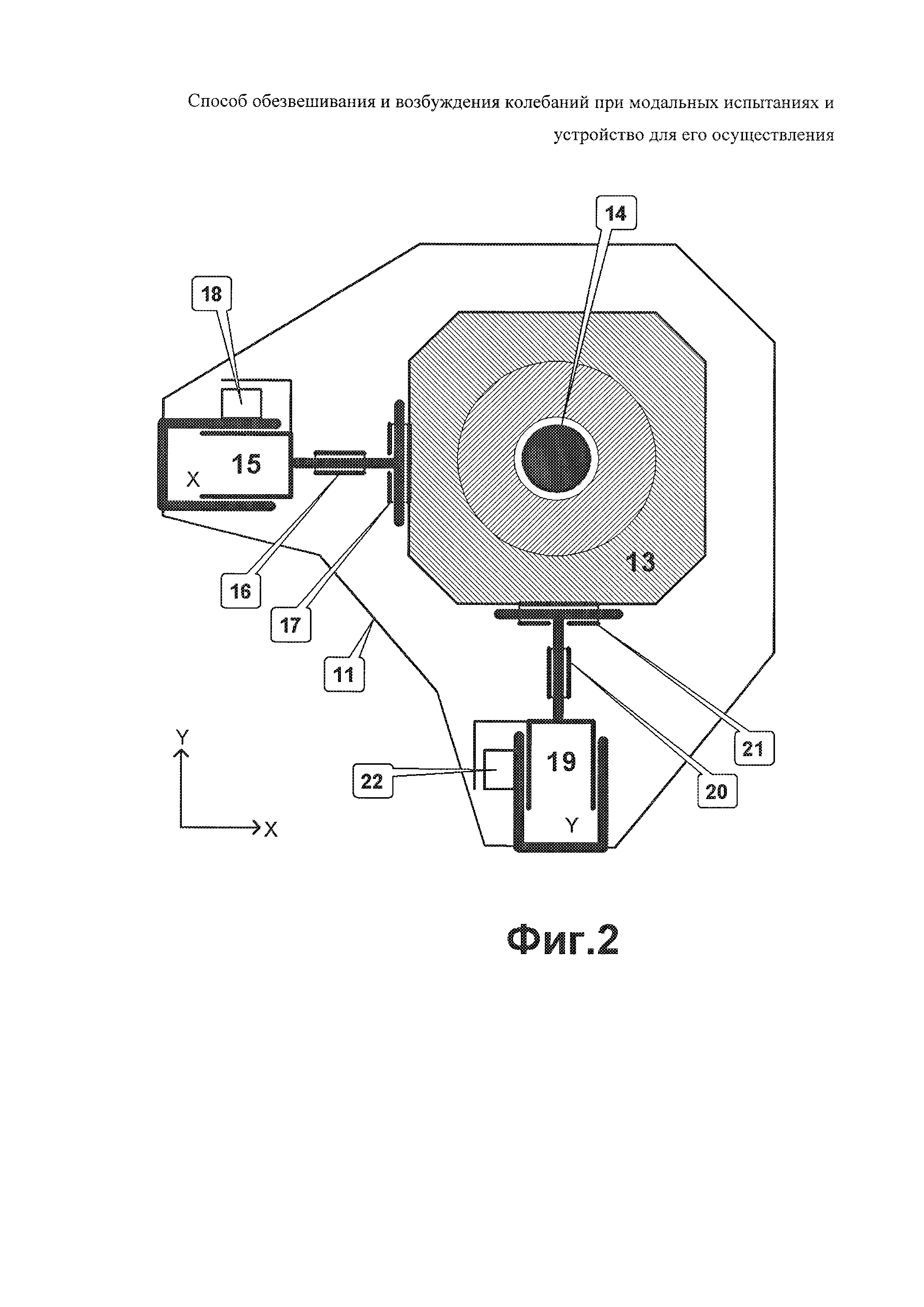
Конструкция устройства, реализующего предлагаемый способ, поясняется эскизными чертежами. Чертеж на Фиг. 1 поясняет вертикальное расположение конструктивных элементов (ориентация силовозбудителя 19 направления Y показана условно), на Фиг. 2 в плане показано расположение конструктивных элементов в горизонтальной плоскости на верхней опорной поверхности 11. Оборудование подачи воздуха высокого давления и проточные каналы аэростатических опор не показаны.
Предложенное устройство для осуществления способа обезвешивания и возбуждения колебаний при модальных испытаниях включает пульт управления 1 для задания режимов устройства и индикации его состояния; цифровой контроллер 2, режимы работы которого задаются оператором с пульта 1; высокоточный преобразователь «код-ток», выступающий в качестве источника тока 3 с тремя выходами, управляемый контроллером 2 по цифровой магистрали; передвижную напольную опору 4, в которой предусмотрены фиксаторы вертикального и горизонтального положения, регулировка положения несущей поверхности по высоте и возможность ее горизонтальной юстировки; кинематическую платформу 5, жестко закрепленную на несущей горизонтальной поверхности передвижной напольной опоры 4, перемещением подвижной части которой в горизонтальном направлении X управляет контроллер 2; кинематическую платформу 6, жестко закрепленную на несущей горизонтальной поверхности подвижной части кинематической платформы 5, перемещением подвижной части которой в горизонтальном направлении Y управляет контроллер 2; кинематическую платформы 7, жестко закрепленную на несущей горизонтальной поверхности подвижной части кинематической платформы 6, перемещением подвижной части которой в вертикальном направлении Z управляет контроллер 2; вертикально расположенный линейный электродинамический силовозбудитель 8, статор которого жестко закреплен на несущей горизонтальной поверхности подвижной части кинематической платформы 7, управляемый с первого выхода преобразователя «код-ток» 3; линейный подшипник 9, обеспечивающий соосность статора и якоря линейного электродинамического силовозбудителя 8; датчик положения 10 якоря силовозбудителя 8 относительно его статора, передающий данные в контроллер 2; горизонтальную опорную площадку 11, жестко связанную с штоком якоря силовозбудителя 8; подвижный опорный элемент 13, образующий вместе с частью горизонтальной опорной площадки 11 плоскую аэростатическую опору 12; сферическую аэростатическую опору 14, передающую усилие с подвижного опорного элемента 13 на опорную точку 23 испытуемого объекта; горизонтально расположенный линейный электродинамический силовозбудитель 15 направления X, управляемый с второго выхода преобразователя «код-ток» 3, статор которого жестко закреплен на горизонтальной опорной площадке 11; линейный подшипник 16, обеспечивающий соосность статора и якоря силовозбудителя 15; линейный подшипник 17, одна часть которого закреплена на боковой грани подвижного опорного элемента 13, а другая часть образует с штоком якоря силовозбудителя 15 жесткое ортогональное соединение (например, Т-образное);; датчик положения 18 якоря силовозбудителя 15 относительно его статора, передающий данные в контроллер 2; горизонтально расположенный линейный электродинамический силовозбудитель 19 направления Y, управляемый с третьего выхода преобразователя «код-ток» 3, статор которого жестко закреплен на горизонтальной опорной площадке 11 ортогонально направлению силовозбудителя 15; линейный подшипник 20, обеспечивающий соосность статора и якоря силовозбудителя 19; линейный подшипник 21, одна часть которого закреплена на боковой грани подвижного опорного элемента 13, а другая часть образует с штоком якоря силовозбудителя 19 жесткое ортогональное соединение; датчик положения 22 якоря силовозбудителя 19 относительно его статора, передающий данные в контроллер 2;
Устройство работает следующим образом. В процессе модальных испытаний для возбуждения колебаний контроллер 2 через высокоточный преобразователь «код-ток» 3, имеющий три независимых цифровых входа и три выхода, формирует в катушках электродинамических силовозбудителей 8, 15, 19 токи с заданными амплитудами и с заданными (например, синусоидальными) зависимостями от времени. Указанные зависимости предварительно задаются оператором через пульт 1 задания режимов устройства и индикации его состояния. Горизонтальные силовозбудители 15, 19 каждый по своей координате формируют компоненту силы, воздействующую на объект через подвижный опорный элемент 13 и сферическую аэростатическую опору 14. Вертикальный силовозбудитель 8, формирует компоненту силы, воздействующую на объект через горизонтальную опорную площадку 11, плоскую аэростатическую опору 12; подвижный опорный элемент 13 и сферическую аэростатическую опору 14, обеспечивающую также три вращательных степени свободы испытуемого объекта в опорной точке 23
Функция компенсации заданной весовой нагрузки реализуется тем, что контроллер 2 к переменному току силовозбудителя вертикального направления 8, возбуждающему колебания, добавляет постоянный ток, формирующий силу, компенсирующую заданную весовую нагрузку, включая вес якоря силовозбудителя 8 и всех узлов, размещенных на горизонтальной опорной площадке 11. Тем самым, полная сила, воздействующая на опорную точку объекта 23, складывается из трех ортогональных переменных компонентов и одного постоянного, направленного вертикально вверх.
Линейный подшипник 9 (например, аэростатический) обеспечивает вертикальную степень свободы перемещения якоря вертикального силовозбудителя 8 относительно его статора и центровку его катушки в магнитном зазоре. Линейные подшипники 16, 20 обеспечивают горизонтальные степени свободы якорей, соответственно, силовозбудителей 15, 19 относительно статоров в направлении их осей, обеспечивая также центровку катушек в магнитных зазорах. Подвижный опорный элемент 13 имеет плоское основание, размещается на аэростатической опоре 12, его степени свободы перемещения в горизонтальных направлениях, ортогональных осям якорей соответствующих силовозбудителей обеспечиваются линейными подшипниками 17, 21. Неподвижная часть подшипников 17, 21 жестко закреплена на соответствующей боковой грани опорного элемента 13, подвижные их части жестко связаны с подвижными частями подшипников 16, 20, соответственно, и через них образуют со штоками якорей силовозбудителей 15, 19 ортогональное соединение (например, Т-образное, при этом неподвижная часть подшипников 17, 21 имеет горизонтальную прорезь). Тем самым подшипники 16, 20, и 17, 21 совместно обеспечивают передачу толкающего и тянущего усилия со стороны якорей силовозбудителей 15, 19 по их осям на опорный элемент 2, обеспечивая при этом свободу его горизонтального перемещения по плоскости аэростатической опоры 16 в поперечных к их осям направлениях и препятствуя вращению.
Кинематические платформы 5, 6, 7 образуют структуру типа «сэндвич», совместно обеспечивая управляемое контроллером перемещение размещенных на ней узлов в любом направлении. Каждая платформа состоит из подвижной площадки, имеющей степень свободы перемещения относительно ее основания, обеспечиваемой актуатором с цифровым управлением (например, на базе шагового двигателя) только в одном из трех ортогональных направлений, при этом каждая платформа перемещает всю смонтированную на ее подвижной площадке конструкцию. Существенно то, что управление движением платформ ведется по чисто кинематическому параметру - перемещению. Существенно то, что контроллер 2 формирует усилия, создаваемые силовозбудителями, через преобразователь «код-ток» 3 и синхронно по цифровым каналам управляет движением каждой кинематической платформы таким образом, что в любой момент времени минимизируется отклонение от среднего положения якоря силовозбудителя соответствующего направления относительно его статора. Для реализации алгоритма такого управления контроллер использует показания датчиков положения 6, 7, 8 якорей относительно статоров. Тем самым, при оптимальном управлении контроллером движением кинематических платформ 5, 6, 7, якоря всех силовозбудителей по координатам своих осей квазинеподвижны относительно опорной точки 23 присоединения испытываемой конструкции к устройству на сферической аэростатической опоре 18 с точностью до его смещения при поворотах на аэростатическом шарнире, чем и достигается линейная зависимость силы от задаваемых токов при больших перемещениях опорной точки в процессе колебаний.
Оборудование устройства закреплено на несущей поверхности передвижной опоры 4, в которой предусмотрены фиксаторы вертикального и горизонтального положения, регулировка положения несущей поверхности по высоте и возможность ее горизонтальной юстировки.
Задание режимов возбуждения и контроль за работой устройства осуществляется с пульта оператора 1.
Работу устройства проще анализировать, если перейти в систему отсчета подвижной площадки какой-либо кинематической платформы по отслеживаемой ею координате. В этой системе отсчета (вообще говоря, неинерциальной, поскольку точка обезвешивания может двигаться вдоль любой координаты произвольно) статор силовозбудителя и точка обезвешивания квазинеподвижны друг относительно друга по координате оси его якоря с той точностью, с какой кинематическая платформа обеспечивает выполнение своей функции. Относительно основания устройства, то есть в неподвижной инерциальной системе отсчета, подвижная площадка вместе с расположенными на ней узлами может (и должна, если возбуждены колебания объекта) перемещаться ускоренно, но силы, действующие между частями системы движущейся как угодно (в данном случае, сила Лоренца, действующая между статорами и якорями), не зависят от ускорения этой системы. Таким образом, поскольку якорь и статор силовозбудителя квазинеподвижны друг относительно друга, сила, действующая со стороны каждого якоря на соответствующую площадку, зависит только от тока, протекающего в его обмотке. Управляя этим током можно нормировать компоненту силы по вертикальной координате с точностью, необходимой для того, чтобы на фоне большой статической силы обезвешивания обеспечить воздействие сравнительно небольшой переменной компоненты силы возбуждения колебаний.
Использование принципа кинематического слежения по трем координатам снимает ограничения по перемещению, связанные с малыми ходами штоков линейных силовозбудителей. Помимо этого алгоритм управления перемещением подвижных частей кинематических платформ обеспечивает удержание якорей электродинамических силовозбудителей вблизи средних положений относительно их статоров, что поозволяет использовать линейные подшипники с малым ходом, а также позволяет минимизировать относительную скорость подвижных частей подшипников, тем самым, минимизируя в них паразитное вязкое трение.
Техническим результатом заявленного способа и реализующего его устройства является:
- повышение точности нормирования статических и переменных силовых воздействий на объект до уровня, приемлемого для технологий модальных испытаний;
- минимизация ограничений степеней свободы перемещения испытуемого объекта, обеспечиваемая приложением силы обезвешивания и возбуждения колебаний в одной точке;
- снятие ограничений по амплитуде свободных перемещений точки обезвешивания, обусловленных малыми ходами штоков линейных силовозбудителей.
Анализ известных технических решений в предметной области применения способа и устройства позволяет сделать вывод об отсутствии в них признаков, сходных с существенными отличительными признаками заявляемого способа и устройства.
Способ защиты командно-измерительной системы космического аппарата
Способ эскплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата, эксплуатирующегося на низкой околоземной орбите
Способ коррекции орбитального движения космического аппарата
Способ резервирования космического аппарата на геостационарной орбите
Способ мониторинговой коллокации на геостационарной орбите
Держатель
Регулируемый узел крепления
Способ автономной коллокации на геостационарной орбите
Способ электрических проверок космического аппарата
Многоканальный командный аппарат с электронной коммутацией
Способ проведения модальных испытаний многосегментных нежестких конструкций

