Результат интеллектуальной деятельности: Устройство для определения положения устройства в пространстве относительно аналогичного устройства
Вид РИД
Изобретение
Устройство относится к средствам определения взаимного расположения объектов в пространстве и может быть использовано при конструировании игрушек, определения взаимного расположения и направления движения летательных аппаратов, в том числе, дронов, а также в космических системах.
Назначение предлагаемого устройства заключается в определении расстояния, направления и ориентации двух устройств, каждое из которых оборудовано такой системой. Каждое из устройств системы выполнено миниатюрным, например, он может быть помещен в корпус размером с теннисный мяч. с низкой потребляемой и излучаемой мощностью, и относительно простым, что означает низкую стоимость изготовления устройства.
Известные системы, выполненные на основе спутниковых навигационных систем, не всегда обеспечивают необходимую точность измерений, относительно дороги, отличаются повышенным энергопотреблением, требуют много времени для подготовки первого запуска, а также не обеспечивают работоспособность в условиях помещений.
Известные навигационные системы, выполненные на основе беспроводных информационных сетей и другие системы, использующие стационарные источники и приёмники сигналов, как это показано в патентах США №№ 6059718, 6400139 и 9459124, требуют специальной внешней инфраструктуры, а также отличаются повышенным энергопотреблением, с учетом затрат на передачу и обработку данных.
Все указанные устройства не обеспечивают определение направление или азимут, а также тангаж устройств, находящихся в неподвижном состоянии.
Техническим решением, наиболее близким к предложенному, является устройство, описанное в патенте Российской Федерации № 2475290 на изобретение. Известное устройство содержит корпус, связанную с корпусом подвижную часть, вычислительное средство и управляемое вычислительным средством устройство, обеспечивающее эффект, воспринимаемый пользователем. В указанной подвижной части закреплена, по меньшей мере, одна катушка индуктивности, также, по меньшей мере, одна катушка индуктивности закреплена в корпусе, при этом устройство снабжено средством измерения взаимной индукции между катушками, связанным с вычислительным средством, которое предназначено для определения взаимного расположения указанных катушек индуктивности по величинам взаимной индуктивности, полученным от указанного средства измерения, и связано с устройством, предназначенным для создания воспринимаемых пользователем эффектов на основе информации о взаимном расположении катушек индуктивности.
Устройство обеспечивает определение направления, однако указанный эффект достигается ограничением перемещения устройства в пространстве.
Технический результат, достигаемый в предложенном устройстве, заключается в преодолении недостатков уровня техники. А именно, в создании универсального устройства для определения взаимного положения в пространстве с аналогичными устройствами, не требующего какой-либо инфраструктуры, готового к работе сразу после включения, обеспечивающего высокую точность измерений.
Технический результат достигается за счет того, что устройство для определения положения устройства в пространстве относительно аналогичного устройства, содержит подвижный корпус, на котором установлены две рамочные антенны, при этом устройство содержит, для каждой антенны, по крайней мере, один датчик ЭДС, наводимой в соответствующей антенне при излучении радиочастотного сигнала по крайней мере одной из антенн аналогичного устройства и счетно-решающее устройство, выполненное вычисляющим амплитуды и ориентации напряженностей магнитного поля, формируемого излучением антенн аналогичного устройства, в соответствии с сигналами датчиков ЭДС, при излучении, и вычисляющим расстояние до аналогичного устройства и ориентацию оси направления, на которой лежит вектор направления на аналогичное устройство в соответствии с направлениями и ориентациями напряженностей магнитного поля, при этом устройство также содержит генератор радиочастотного сигнала, выполненный формирующим радиочастотный сигнал с напряжением заранее заданной частоты и амплитуды, с возможностью периодической подачи радиочастотного сигнала на антенны устройства, с обеспечением порядка работы, при котором датчики ЭДС работают поочередно с генератором радиочастотного сигнала и не одновременно с ним и блок определения направления на аналогичное устройство, выполненный с обеспечением определения направления по переменному магнитному полю, излучаемому антеннами аналогичного устройства. В частном случае реализации изобретения, радиочастотный сигнал подается поочередно на антенны через заранее заданные моменты времени, а блок определения направления на аналогичное устройство выполнен дополнительно определяющим ориентацию аналогичного устройства по отношению к устройству, по разности ЭДС, возбуждаемых в датчиках различными антеннами аналогичного устройства. Устройство может также содержать третью рамочную антенну, плоскость которой расположена под углами к плоскостям первых двух рамочных антенн и пересекается с линией пересечения плоскостей первых двух рамочных антенн.
Первый и второй корпуса могут быть выполнены с возможностью перемещения по плоскости основания, а рамочные антенны установлены в корпусе таким образом, что при установке корпусов на плоскости основания, плоскости рамочных антенн расположены под углами к плоскости основания, которая пересекается с линиями пересечения плоскостей рамочных антенн соответствующих устройств. Само устройство может быть выполнено с возможностью подачи в заранее заданной последовательности радиочастотного сигнала, формируемого генератором радиочастотного сигнала на антенны устройства с заранее заданным интервалом между моментами подачи радиочастотного сигнала на антенны устройства. Каждая из рамочных антенн может быть выполнена в виде двойной рамочной антенны, каждая из частей которой представляет собой простую рамочную антенну, устройство дополнительно содержит датчики ЭДС в каждой из частей рамочных антенн, а блок определения направления вектора направления на аналогичное устройство выполнен определяющим направление вектора по результатам сравнения ЭДС, формируемых в частях одной и той же двойной рамочной антенны излучением антенн аналогичного устройства.
Для измерения относительных координат передающего устройства, в приемном устройстве, как показано на фиг. 1, используется принцип взаимной индукции. К катушке передающего устройства прикладывается напряжение с переменной частотой, а в катушках приемного устройства измеряется возбужденное напряжение. Приемное устройство определяет положение передающего устройства и ориентацию передающего устройства в системе координат, привязанной к принимающему устройству.
В настоящее время система реализована для определения координат и направления на плоскости. Оба устройства, в этом случае, перемещаются по плоской поверхности, например, по полу. В этом случае достаточно двух передающих катушек и двух приемных катушек, установленных на устройствах. В случае, если катушки расположены ортогонально, существенно упрощаются многие вычисления.
Каждое устройство содержит четыре рамочных антенны, две передающие и две принимающие катушки (антенны), реализованные в виде проводников на печатных платах. Поскольку излучающие и приемные катушки одного устройства, в предпочтительном случае, не используются одновременно, устройство может содержать по одной паре универсальных катушек для каждого направления. В другом частном случает реализации, передающие и приемные катушки имеют различное число витков, для согласования с электронными цепями устройства.
Первая передающая катушка излучает электромагнитное поле в определенный промежуток времени, в связи с чем можно провести измерение сигналов двумя приемными катушками. В течение другого промежутка времени излучает электромагнитное поле следующая катушка, а на приемном устройстве измеряются два сигнала с приемных катушек. Таким образом, формируются результаты измерения в виде матрицы 2x2, где столбцы характеризуют номер принимающей катушки, а строки – номера измерений или номера передающих катушек. В трехмерном варианте, матрица будет иметь размерность 3х3.
На основании этих матриц можно определить:
- направление на приемное устройство в системе координат передающего устройства с неопределенностью ±180o;
- направление передающего устройства в системе координат приемного устройства с неопределенностью ±180o;
- расстояние между центрами катушек;
Без использования дополнительных технических решений существует неопределенность в 180o в определении ориентации устройств. Например, если в результате вычислений получается угол 45o, то реальное значение может быть равно 45o или 45o + 180o = 225o. В случае направления на приемное устройство, в системе координат передающего устройства, эта неопределенность означает, что неизвестно повернуто ли передающее устройство передом к принимающему или задом. В случае направления передающего устройства в системе координат приемного устройства эта неопределенность означает, что неизвестно находится ли передающее устройство в передней полусфере принимающего или в задней.
При усложнении конструкции, решение неопределенности может быть достигнуто, например, с использованием перемещения устройства и сравнения уровня сигнала в разных положениях. Сигнал увеличивается при движении вперед, если передающее устройство находится в передней полусфере. Для использования этого варианта нужно дождаться, когда передающее устройство остановится и обнаружить этот факт при помощи раскрываемого в данной заявке способа определения положения.
Другим способом разрешения неопределенности направления на другое устройство является использование принимающих антенн, состоящих из двух одинаковых частей, с измерением ЭДС в двух частях и постулированием что устройство находится с той стороны с которой находится часть с большей ЭДС.
Дополнительный способ устранения неопределенности использует связь между устройствами. Например, если устройство определяющее положение стоит, а аналогичное движется назад, при этом расстояние до него увеличивается, то аналогичное устройство повернуто передом к устройству, определяющему положение.
Из-за низкой частоты передаваемого и принимаемого сигнала порядка 400 кГц, скорость передачи данных, реализованная в устройстве с использованием дискретных компонентов, составляет 64 бит в секунду. Этой скорости достаточно для отправки информацию о направлении движения передающего устройства и решать проблему неопределенности ориентации.
Кроме того, счетно-решающее устройство может содержать отдельный удаленный блок, вычисляющий ориентацию вектора направления на аналогичное устройство, выполненный в виде универсального вычислительного блока, общего для устройства и аналогичного устройства, при этом отдельный удаленный блок выполнен принимающим параметры движения устройства и аналогичного устройства и выбирающим наиболее вероятные направления движения устройства и аналогичного устройства из четырех альтернативных вариантов согласно параметрам движения устройств и аналогичного устройства, при этом альтернативными вариантами являются: устройство движется к аналогичному устройству, аналогичное устройство движется от устройства;
устройство движется к аналогичному устройству, аналогичное устройство движется к устройству;
устройство движется от аналогичного устройства, аналогичное устройство движется от устройства;
устройство движется от аналогичного устройства, аналогичное устройство движется к устройству.
Отдельный удаленный блок может быть выполнен в виде счетно-решающего устройство мобильного телефона пользователя, который может быть выполнен с возможностью динамического схематического отображения параметров движения устройства и аналогичного устройства. Также отдельный удаленный блок может быть выполнен с возможностью вычисления векторов направления устройства на несколько аналогичных устройств.
Существует возможность единожды разрешив неопределенность двух вариантов направления отслеживать положение аналогичного устройства. Для этого интервал между измерениями делается достаточно малым, чтобы ни одно из устройств за время между измерениями не могло повернуться больше чем на 90o, это позволяет постулировать что при новом измерении истинным является то направление, которое ближе к направлению при предыдущем измерении.
Изобретение поясняется чертежами, на которых изображены:
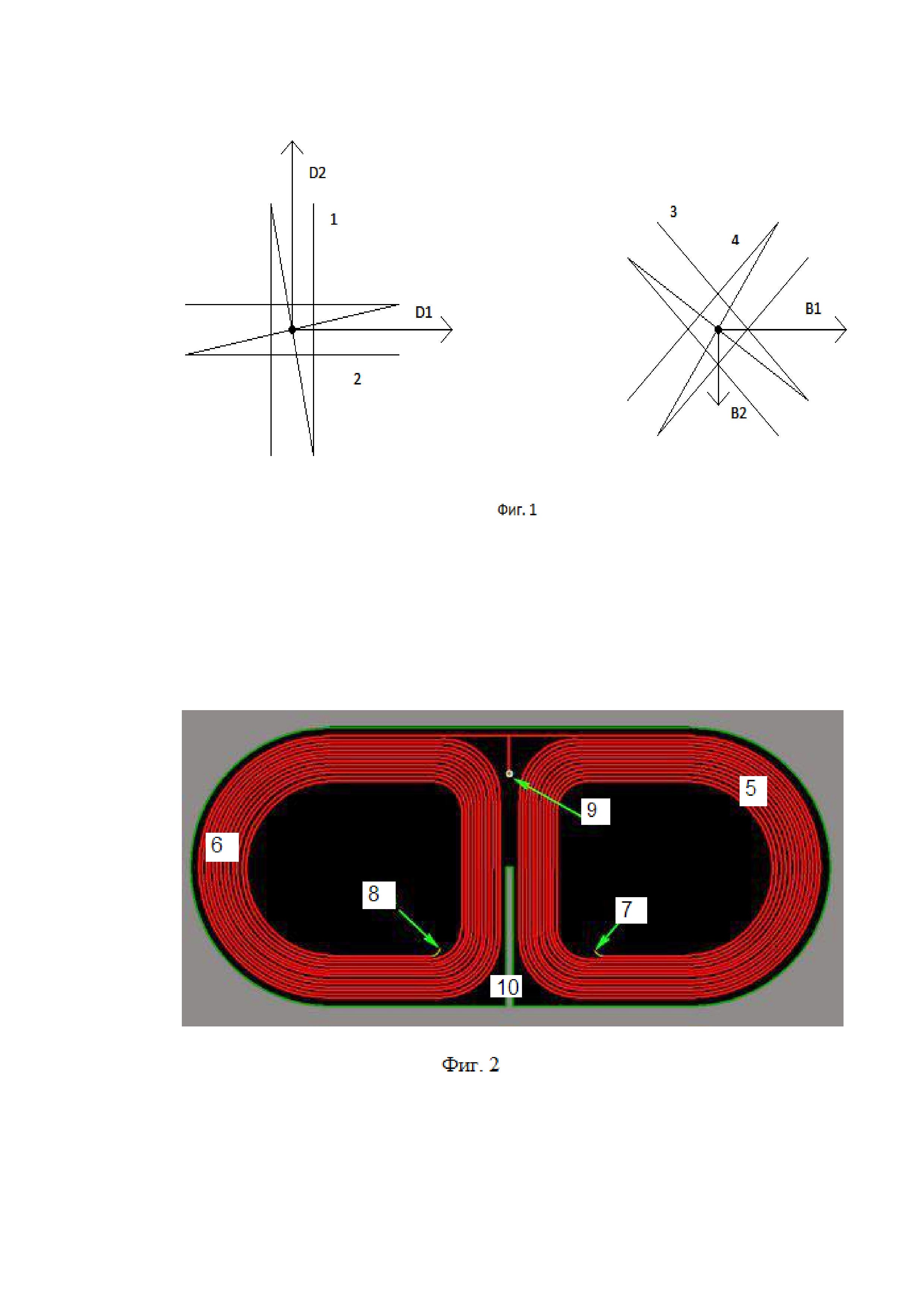
На фиг 1 - схематическое изображение взаимодействия катушек (антенн);
На фиг. 2 - рамочная антенна одного из примеров реализации изобретения;
На фиг. 3 – пример выполнения движущейся конструкции с использованием предложенного устройства;
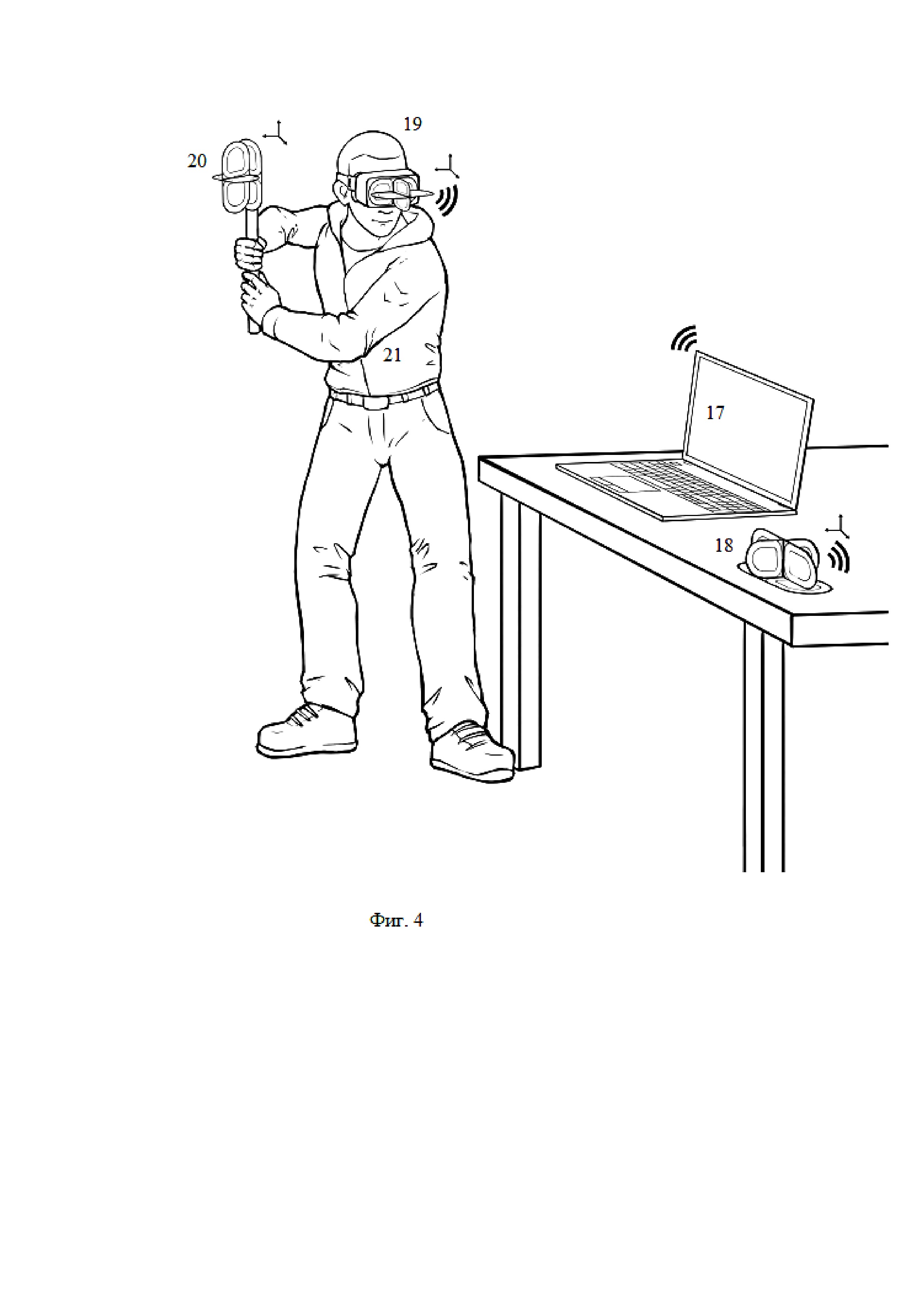
На фиг. 4 – еще один альтернативный пример примере использования изобретения
На фиг. 1 схематично изображены катушки 1 и 2 передающего устройства и векторы их диполей D1 и D2, соответственно, а также катушки 3 и 4 приемного устройства и векторы магнитного поля В1 и В2, соответственно, создаваемые катушками 1 и 2.
На фиг. 2 изображена рамочная антенна одного из вариантов реализации изобретения, выполненная из двух смежных рамочных антенн 5 и 6, соединенных последовательно, с возможностью измерения ЭДС как любой из отдельных частей, так и во всей антенне. Для измерений используются три вывода, два из которых 7 и 8 расположены на свободных концах катушек, а третий 9 расположен в точке соединения катушек. Для механического соединения ортогональных антенн, на печатной плте предусмотрена прорезь 10.
Электродвижущая сила, измеренная на крайних выводах 7 и 8 последовательно соединенных катушек, примерно равна электродвижущей силе одной катушки, покрывающей ту же область. Крайние выводы используются для измерения положения других устройств в диапазоне от -90o до 90o.
Вспомогательный вывод 9 в точке соединения катушек, используется для разрешения неопределенности 180o, так если другое устройство находится слева от антенны, то сигнал, наведенный в левой части катушки, больше, чем сигнал, наведенный в то же время в правой части.
Такой подход не применим, если плоскость антенны ортогональна к направлению на другое устройство. В этом случае аналогичная составная катушка, ортогональная данной, может решить указанную неопределенность, поскольку направление на второе устройство лежит в плоскости указанной катушки.
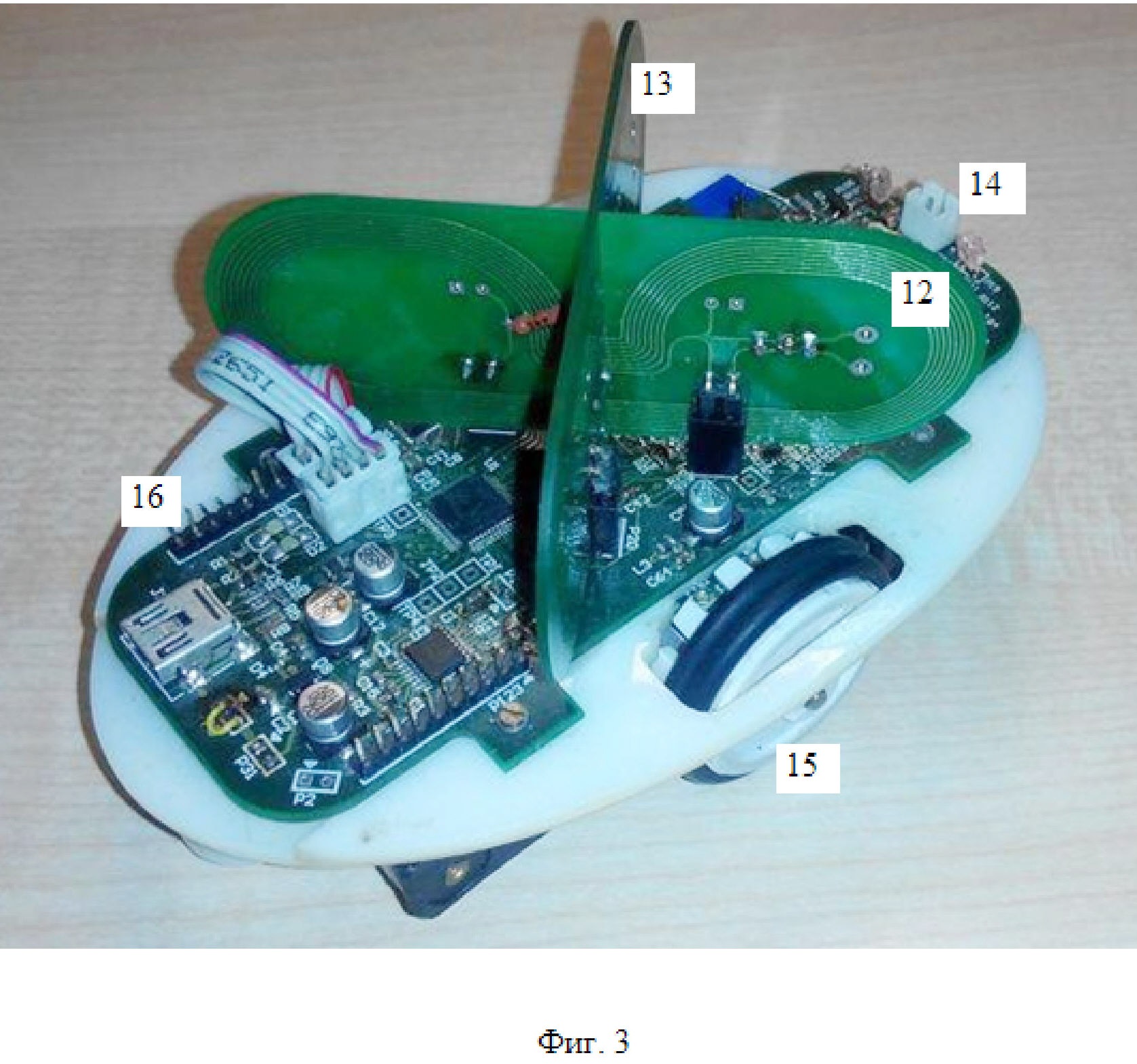
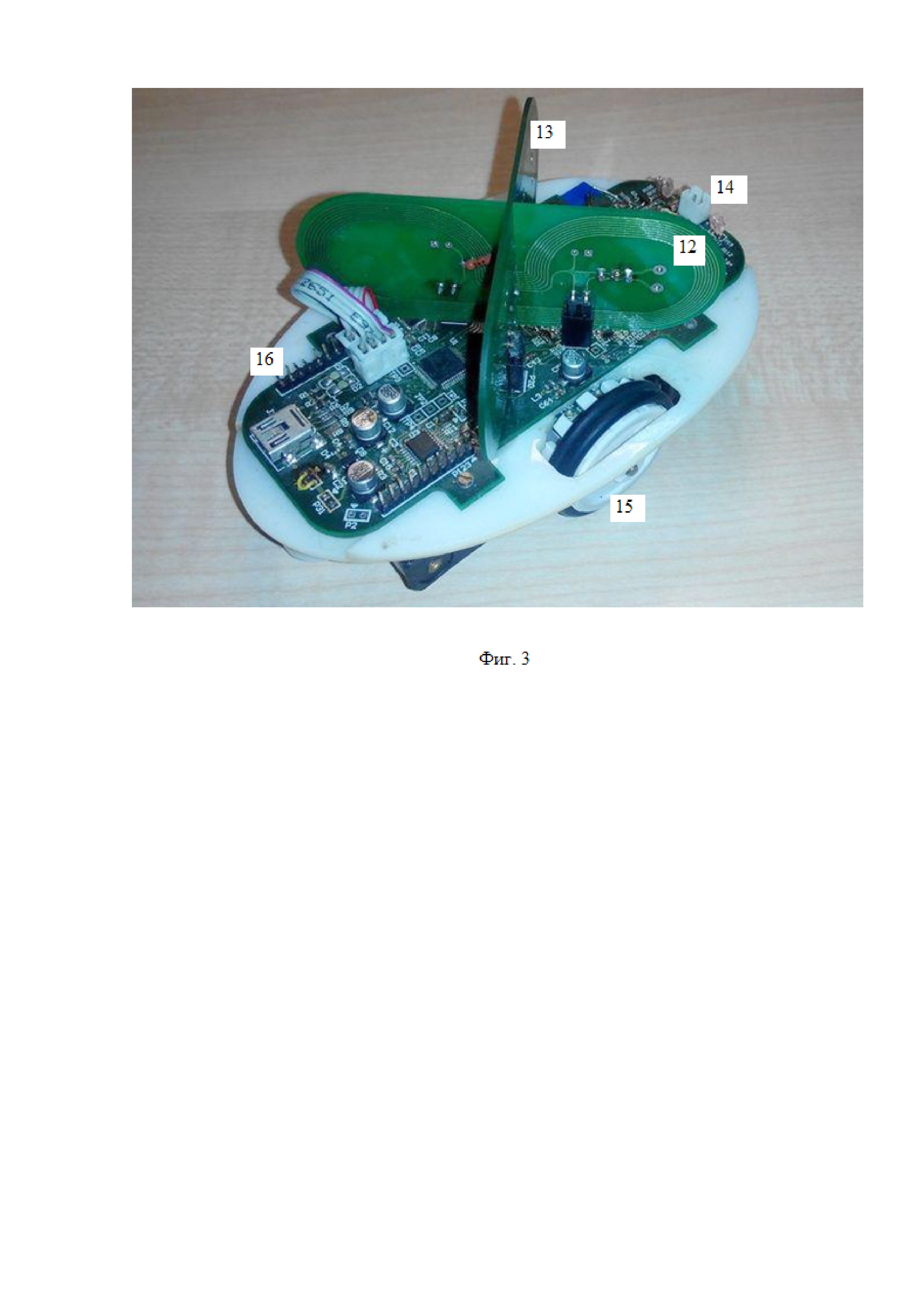
Изображенный на фиг. 3 пример выполнения движущейся конструкции с использованием предложенного устройства, содержит процессор 11, силовые блоки управления, управляемые процессором, приемо-передающие антенны 12 и 13, двигатели, приводящие в действие колеса 15 и схемы управления и, в частном случае реализации, ИК-датчик 14 приближения спереди для предотвращения столкновений. Устройство рассчитано на питание от 4 батарей AAA, общим номинальным напряжением 6 В, линейный преобразователь напряжения используется для обеспечения стабильного питания электронных компонентов. В устройстве используется процессор NXP ARM CortexM3, но можно использовать любой другой процессор достаточной вычислительной мощности.
Устройство содержит интерфейс 16 CPU UART, доступный на специальном разъеме. Он используется для подключения модуля bluetooth для связи с ПК.
В предпочтительном воплощении оба устройства представляют собой тележки, перемещающиеся по горизонтальной поверхности (полу). И полезным результатом изобретения является информация на борту каждой тележки о положении другой аналогичной тележки. Каждая тележка содержит четыре рамочных антенны, две передающие и две принимающие, реализованные в виде проводников на печатных платах.
В предпочтительном воплощении для реализации антенн используются две печатные платы одинакового размера расположены ортогонально к полу и друг к другу, печатные платы пересекаются посередине и содержат с одной стороны передающие, а с другой – приемные катушки или антенны. Каждая печатная плата содержит одну передающую и одну приемную антенну, и форма антенн является симметричной относительно вертикальной оси, как это показано на фиг. 2. Такая симметрия значительно упрощает вычисления. На передающие антенны в заранее заданной последовательности подается переменное напряжение, обеспечивается возможность перестройки его частоты от 130 кГц до 1 Мгц, и эта частота выбирается из соображений электромагнитной совместимости и требований регулирующих органов. В предпочтительном воплощении сначала на одну передающую антенну подается сигнал в течение 12 мс, далее 12 мс сигнал подается на другую и это повторяется каждые 100мс. Это позволяет определять положение другой тележки 10раз в секунду занимая эфир менее 25%, последнее позволяет одновременно работать до четырех аналогичных устройств на принципах временного разделения канала, в этом случае каждое из устройств получает информацию о трех других. В предпочтительном воплощении два датчика ЭДС работают все время, когда не ведется передача и каждый измеряет амплитуду сигнала с соответствующей катушки.
Поскольку приемные катушки расположены ортогонально, а ЭДС пропорционально переменному магнитному полю внутри катушки, одновременное измерение ЭДС, как показано на фиг 1, обеспечивает измерение векторов В1 и В2. Когда излучает катушка 1 обе приемные катушки измеряют вектор B1 а когда излучает катушка 2 обе приемные катушки измеряют вектор B2. Однако поскольку электромагнитное поле переменное, то удается определить прямую, на которой лежит вектор B, и его длину, но невозможно определить направление вектора в этой прямой. Поэтому направление вектора берется произвольно любым из двух, а возможность того что на самом деле он противоположенный учитывается при интерпретации результатов вычислений.
Для вычисления взаимного положения устройств исходя их результатов измерений используется модифицированное дипольное приближение, когда каждая излучающая катушка приближенно считается магнитным диполем и постулируется что поле ей порождаемое описывается формулой.
 (1)
(1)
Данная формула отличается от классической формулы известной из электродинамики наличием члена K(|r|) который задается таблично и определяется экспериментально для выбранной геометрии катушек. Это позволяет увеличить точность на расстояниях сравнимых с размером катушки, поскольку дипольное приближение формально является применимым только на расстояниях много больше размеров катушек. На фиг. 1 векторы диполей соответствующих катушкам обозначены D1 и D2.
В случае переменного магнитного поля формулы (1) применимы к амплитудам переменного сигнала, величина |D| в этом случае при заданной геометрии катушке и известной амплитуде циркулирующего в ней тока также является известной.
Поскольку аналогичное устройство создающее переменное магнитное поле имеет в предпочтительном воплощении две ортогональные катушки включаемые поочередно, в результате измерения ЭДС в обоих принимающих катушках при включении каждой из двух передающих катушек, измеряется векторы B1 и B2 соответствующие излучению катушек описываемых диполями D1 и D2, то есть можно записать систему из двух уравнений (1).


D2=D1*M90
|D1|=|D2|=1, где
M90 - это матрица поворота на 90o.
В предпочтительном воплощении данная система решается численно, и в результате вычисляются: вектор R и ориентацию векторов D1, D2 относительно R. Вектор -R это положение пересечения катушек аналогично устройства в системе координат устройства производящего измерения, а ориентация векторов D1, D2 дает информацию о повороте аналогичного устройства. Для данной системы всегда есть два решения, если R, D1, D2 является решением то -R, -D1, -D2 также является решением. Более того поскольку направление B1 и B2 может на самом деле быть противоположенным тому которое было произвольно выбрано после измерений, возможны следующие решения R, D1, D2, R, -D1, -D2, -R, -D1, -D2, -R, D1, D2.
В предпочтительном воплощении каждая из приемных рамочных антенн разделена на две части, так что каждая часть представляет собой рамочную антенну и возможно измерение ЭДС в одной из частей одновременно с измерением ЭДС во всей антенне, при этом ЭДС в другой части вычисляется вычитанием. Одна такая часть лежит с одной стороны от вертикальной линии пересечения катушек, а другая с другой, части выполнены симметричными относительно этой линии. Блок определения направления на аналогичное устройство выполнен определяющим направление на аналогичное устройство в соответствии с предположением о том, что величина ЭДС больше в той части рамочной антенны, которая расположена ближе к аналогичному устройству. Чем ближе угол между такой катушкой, состоящей из двух частей, и направлением на устройство к 90o тем хуже работает данный принцип потому что в предельном случае при угле 90o обе катушки находятся на одинаковом расстоянии и определить направление невозможно. Поэтому из двух ортогональных печатных плат, содержащих приемные антенны, используется только та, угол которой с направлением на устройство меньше, и для определения направления используются катушки с этой печатной платы. Таким образом, всегда используются катушки, угол которых относительно направления на аналогичное устройство равен или меньше 45o.
В другом альтернативном примере реализации, показанном на фиг. 4, система, в которой используются устройства, содержит три предложенных устройства с тремя антеннами и центральный вычислительный блок, выполненный, например, в виде компьютера 17. В данном примере реализации, каждое из устройств содержит по три печатные платы каждая из которых содержит две катушки, одна из которых может быть использована для создания переменного магнитного поля, другая для его измерения, путем измерения ЭДС генерируемой в этой катушке.
Как показано на изображении, система содержит реперное первое устройство 18, неподвижное в пространстве, второе устройство 19, прикрепленное к шлему виртуальной реальности и третье устройство 20, положение которого выбирается пользователем 21. Третье устройство используется, например, для формирования изображения виртуального оружия, например, лазерного меча, реперное устройство используется для определения перемещения второго и третьего устройств в пространстве, а второе устройство используется для формирования виртуальной или дополненной реальности, например, для формирования средневекового пейзажа, на фоне которого пользователь использует виртуальный меч. Система может содержать несколько вторых и третьих устройств, при использовании системы несколькими пользователями одновременно. Вычислительная система в виде персонального компьютера может быть использована как для вычисления положений устройств в пространстве, так и для формирования изображения виртуальной или дополненной реальности.
Каждое из трех устройств содержит датчик ускорения и электронный блок, осуществляющий преобразование выходных сигналов датчиков в цифровой вид, а также цифровую обработку сигналов и передачу результатов по беспроводному каналу на центральный вычислитель. Катушки, создающие переменное электромагнитное поле, включаются поочередною. После того как одно устройство поочередно включает все три своих катушки, через небольшую паузу, начинает включать свои катушки другое устройство и таким образом включение всех девяти катушек трех устройств повторяется периодически. Все три катушки измеряющие переменное магнитное поле, принадлежащие одному устройству, расположены ортогонально друг другу, так что их центры совпадают.
Электронный блок каждого устройства одновременно измеряет ЭДС наводимые в приемных катушках переменным магнитным полем. Для вычисления взаимной ориентации двух устройств исходя из девяти измеренных величин ЭДС решается система из трех уравнений, отличающаяся от (2) наличием третьего уравнения для третьей катушки, данная система векторных уравнений использует трехмерные векторы в отличие от системы (2).
Аналогично предпочтительному примеру реализации, в данном примере реализации система уравнений также имеет четыре решения. При этом, в качестве решения, возможно два варианта вектора, соединяющего устройства, равных по модулю и противоположных по направлению, а для вектора задающего ориентацию аналогичного устройства, тоже есть два варианта решения, равных по модулю и противоположных по направлению. До тех пор, пока из четырех решений не выявлено решение, соответствующее реальному расположению устройств в пространстве, эти решения считаются гипотезами. Для того чтобы определить истинные направления из этих четырех гипотез, в альтернативном примере реализации, используется совместная обработка информации от всех датчиков на центральном вычислителе, с использованием данные от датчиков ускорения. Для каждой гипотезы, на основании взаимной ориентации устройств, вычисляется вторая производная от расстояния между датчиками. Вторая производная вычисляется двумя способами, путем дифференцирования расстояния между устройствами получаемого рассмотренным способом и на основании показаний датчиков ускорения. У правильной гипотезы две вычисленные разницы ускорения будут всегда совпадать с точностью до погрешности измерений и вычислений, а у ложных гипотез, в общем случае, совпадать не будут. Это позволяет специалисту, владеющим современным уровнем науки и техники в цифровой обработке сигнала, разработать алгоритм, исключающий из рассмотрения неверные гипотезы и, в качестве полезного результата при использовании изобретения, формировать сведения о взаимном положении и взаимной ориентации каждой пары устройств. На основании определения трех взаимных положений в трех возможных парах устройств, вычисляется взаимное положение трех устройств, а избыточность информации (третья пара устройств) используется для подавления шумов при использовании фильтрации Калмана.
В другой альтернативной реализации устройство может быть выполнено принимающим от второго устройства сигнал, соответствующий направлению движения аналогичного(вперед/назад/стоп) устройства, и в случае его движения определяющим какая из двух возможных его ориентации соответствует действительности. А в случае остановки второго устройства при движении первого определяется какая из двух гипотез о положении второго устройства является верной.
Устройство для игр
Способ регистрации отраженного сигнала при радиолокации
Устройство для игр
Способ регистрации отраженного сигнала при радиолокации

