Результат интеллектуальной деятельности: Способ поиска оптических и оптико-электронных приборов
Вид РИД
Изобретение
Изобретение относится к области оптической локационной техники и может быть использовано для дистанционного обнаружения и измерения координат оптических и оптико-электронных приборов различного типа и назначения.
Наиболее близким по технической сущности и достигаемому результату является способ (прототип) обнаружения оптических и оптико-электронных приборов (ООЭП) (см., например, Белкин Н.Д., Демкин В.К., Печерский Е.А., Пшеничников С.М. Патент на изобретение №22155357, G01S 5/12. Способ обнаружения оптических и оптико-электронных приборов. М.: Роспатент, опубл. 27.08.2000), основанный на облучении зоны предполагаемого расположения ООЭП оптическим излучением, приеме отраженного излучения, формировании сигнала пропорционального разности интенсивностей отраженного излучения в n-м и n-1-м шагах обзора, пропорционального разности интенсивностей отраженного излучения в n+1-м и n-м шагах обзора, по наличию которых судят о наличии оптико-электронного прибора. Недостатком способа является необходимость размещения большого количества средств обнаружения ООЭП, обеспечивающих поиск и обнаружения пространственно разнесенных ООЭП. Этот недостаток обуславливается ограниченным сектором просмотра средств обнаружения ООЭП зоны их возможного размещения, а также взаимной ориентацией полей зрения. Еще одним недостатком способа является отсутствие оценки координат местоположения ООЭП.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является расширение зоны поиска и обнаружения ООЭП одним средством поиска ООЭП и обеспечение оценки координат их местоположения.
Технический результат достигается тем, что в известном способе поиска ООЭП, основанный на облучении зоны предполагаемого расположения ООЭП оптическим излучением, приеме отраженного излучения, используют дистанционно пилотируемый летательный аппарат (ДПЛА) с установленными на борту оптико-электронными передающим и приемным устройствами, радионавигационным приемником и блоком передачи данных, разбивают зону поиска ООЭП на N секторов и формируют маршрут полета ДПЛА, запускают ДПЛА и управляют траекторией его полета по заданному маршруту, осуществляют периодическую поочередную съемку без облучения и с облучением оптическим излучением «-го сектора поиска ООЭП, где  - номер сектора поиска ООЭП, при каждой съемке n-го сектора поиска ООЭП формируют изображение и запоминают его параметры, вычитают параметры in-го изображения, полученные без облучения n-го сектора поиска ООЭП из параметров jn-го изображения, полученных при облучении n-го сектора поиска ООЭП, где
- номер сектора поиска ООЭП, при каждой съемке n-го сектора поиска ООЭП формируют изображение и запоминают его параметры, вычитают параметры in-го изображения, полученные без облучения n-го сектора поиска ООЭП из параметров jn-го изображения, полученных при облучении n-го сектора поиска ООЭП, где  - номер изображения, полученного без облучения оптическим излучением n-го сектора поиска ООЭП, где j=1,1 - номер изображения, полученного при облучении оптическим излучением n-го сектора поиска ООЭП,
- номер изображения, полученного без облучения оптическим излучением n-го сектора поиска ООЭП, где j=1,1 - номер изображения, полученного при облучении оптическим излучением n-го сектора поиска ООЭП,  - общее количество пар изображений, полученных без облучения и при облучении оптическим излучением n-го сектора поиска ООЭП, и формируют разностное ijn-е изображение ООЭП, параметры которого сравнивают с эталонными значениями параметров отраженных сигналов от ООЭП, при совпадении значений сравниваемых параметров определяют и запоминают kn-е координаты ДПЛА и относительно их kn-е пеленгационные углы ООЭП в n-ом секторе поиска ООЭП, где
- общее количество пар изображений, полученных без облучения и при облучении оптическим излучением n-го сектора поиска ООЭП, и формируют разностное ijn-е изображение ООЭП, параметры которого сравнивают с эталонными значениями параметров отраженных сигналов от ООЭП, при совпадении значений сравниваемых параметров определяют и запоминают kn-е координаты ДПЛА и относительно их kn-е пеленгационные углы ООЭП в n-ом секторе поиска ООЭП, где  - номера координат ДПЛА и углов пеленгов, измеренных при совпадении параметров ijn-го разностного изображения ООЭП с эталонными с параметрами отраженных сигналов от ООЭП, при завершении просмотра n-го сектора поиска ООЭП определяют координаты местоположения ООЭП по координатам точки пересечения линий kn-х пеленгов ООЭП относительно kn-х координат местоположения ДПЛА в процессе его полета и повторяют процедуры поиска ООЭП для n+1-го сектора поиска, передают значения измеренных координат местоположения ООЭП на пункт управления ДПЛА.
- номера координат ДПЛА и углов пеленгов, измеренных при совпадении параметров ijn-го разностного изображения ООЭП с эталонными с параметрами отраженных сигналов от ООЭП, при завершении просмотра n-го сектора поиска ООЭП определяют координаты местоположения ООЭП по координатам точки пересечения линий kn-х пеленгов ООЭП относительно kn-х координат местоположения ДПЛА в процессе его полета и повторяют процедуры поиска ООЭП для n+1-го сектора поиска, передают значения измеренных координат местоположения ООЭП на пункт управления ДПЛА.
Сущность изобретения заключается в использовании ДПЛА с установленными на борту оптико-электронными передающим и приемным устройствами, радионавигационным приемником и блоком передачи данных, осуществляющими полет по заданному маршруту для поиска ООЭП по секторам в определенной зоне. Осуществляют периодическую поочередную съемку без облучения и с облучением оптическим излучением секторов поиска ООЭП и корреляционную обработку получаемых изображений, на основе которой обнаруживают и определяют координаты размещения ООЭП относительно координат местоположения ДПЛА в процессе полета.
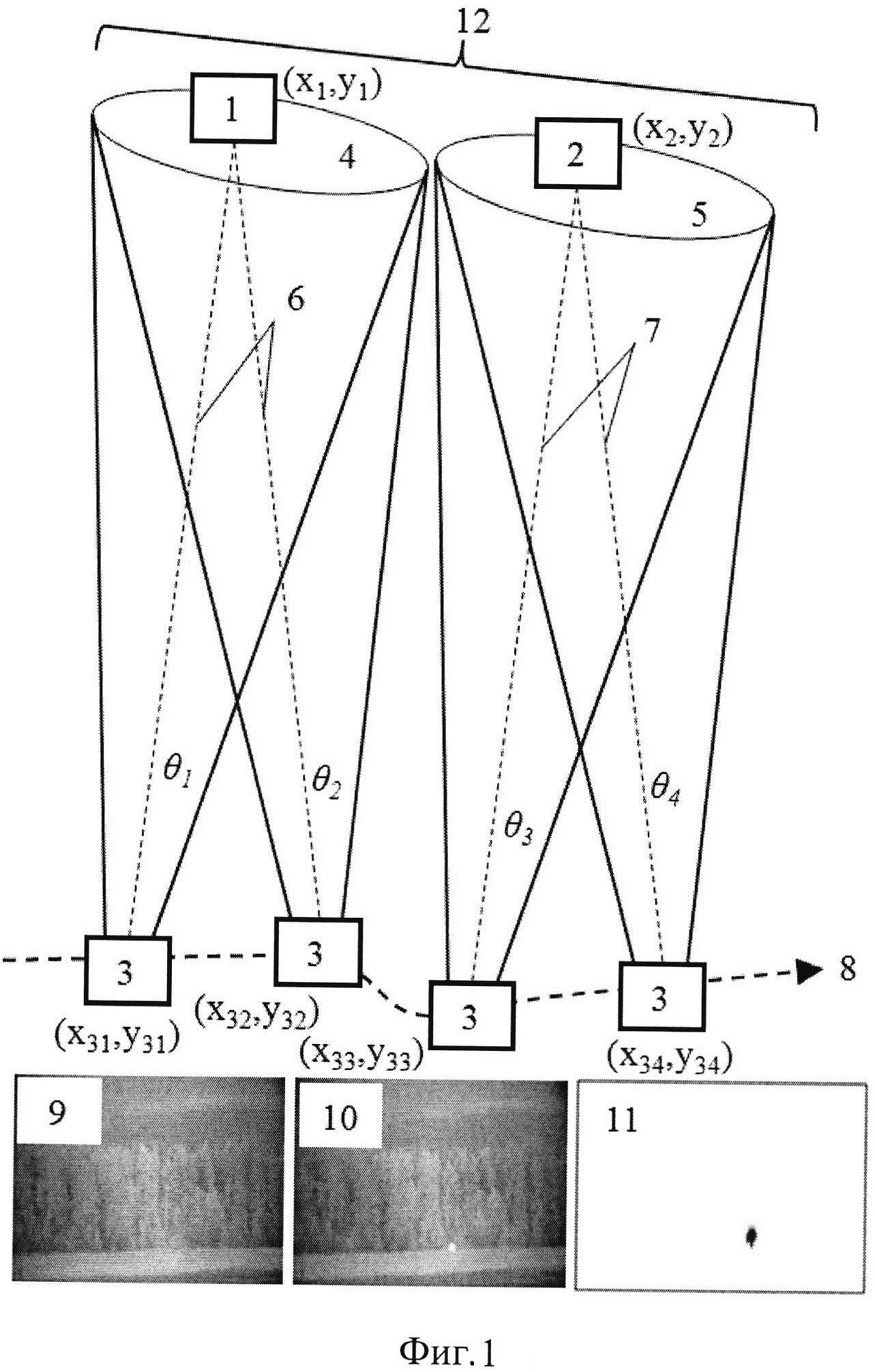
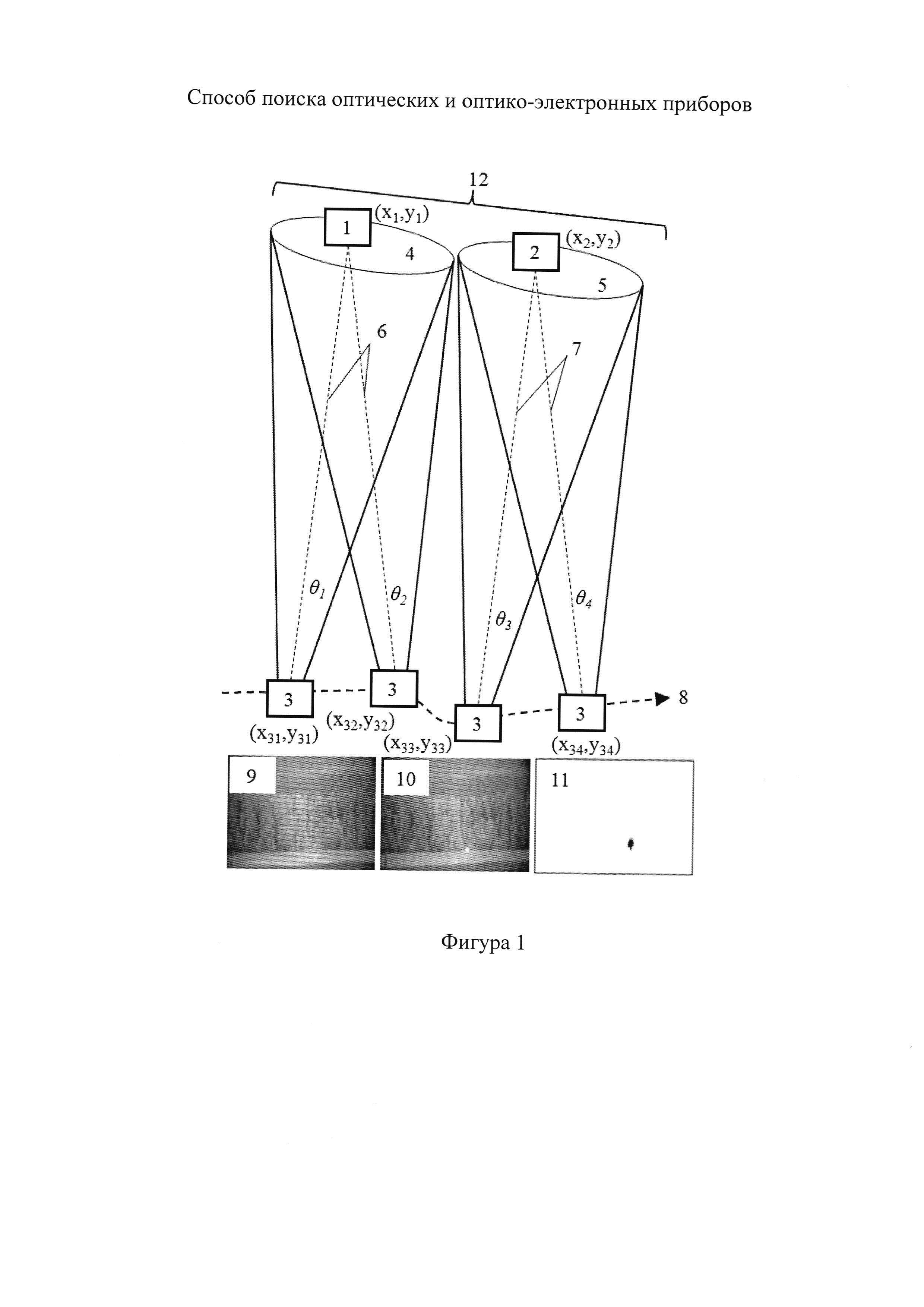
На фигуре 1 представлена схема, поясняющая способ, где: 1, 2 - ООЭП; 3 - ДПЛА с установленными на борту оптико-электронными передающим и приемным устройствами, радионавигационным приемником и блоком передачи данных; 4, 5 - сектор поиска ООЭП; 6, 7 - линии пеленгов ООЭП; 8 - маршрут полета ДПЛА; 9 - изображение, полученное без облучения текущего сектора поиска ООЭП; 10 - изображение, полученное при облучении текущего сектора поиска ООЭП; 11 - разностное изображение; 12 - зона поиска ООЭП. При необходимости осуществления поиска ООЭП 1, 2 в зоне 12 их возможного размещения ее делят на секторы 4, 5. При этом размеры и количество секторов 4, 5 определяется характеристиками полей зрения оптико-электронных передающего и приемного устройств, размерами зоны и расстоянием ее наблюдения, а также на основе пространственных характеристик секторов 4, 5 поиска ООЭП и 1, 2 формируют маршрут полета ДПЛА 8. Запускают ДПЛА 3 и управляют его полетом по заданному маршруту 8. На начальном этапе поиска ООЭП 1, 2 в зоне 12 осуществляют периодическую поочередную съемку без облучения и с облучением оптическим излучением первого сектора поиска ООЭП 4. При этом каждый раз формируют изображения 9, 10 и запоминают их параметры. Вычитают параметры изображения 9, полученные без облучения сектора поиска ООЭП 4 из параметров 10 изображения, полученных при облучении сектора поиска ООЭП 4, при каждой парной съемке и формируют разностное изображение 11, параметры которого сравнивают с эталонными значениями параметров отраженных сигналов от ООЭП. При совпадении значений сравниваемых параметров определяют и запоминают координаты текущего местоположения ДПЛА 3 (х31, у31), (х32, у32) и относительно их пеленгационные углы ООЭП 6 (θ1, θ2) в секторе поиска 4. При завершении просмотра сектора поиска ООЭП 4 определяют координаты местоположения ООЭП 1 (х1, у1) по координатам точки пересечения линий их пеленгов 6 (θ1, θ2) относительно координат местоположения ДПЛА в процессе его полета (х31, y31), (х32, y32). Повторяют аналогичные процедуры поиска ООЭП для следующего сектора поиска 5, включающие: периодическую поочередную съемку без облучения и с облучением оптическим излучением сектора ООЭП 5, корреляционную обработку текущих изображений 9, 10 и 11, определении координат текущего местоположения ДПЛА 3 (х33, у33), (х34, y34) и пеленгационных углов ООЭП 7 (θ3, θ4) и на их основе координат местоположения ООЭП 2 (х2, у2). Значения измеренных координат местоположения ООЭП (x1, y1), (х2, y2) передают потребителю, например, на пункт управления ДПЛА.
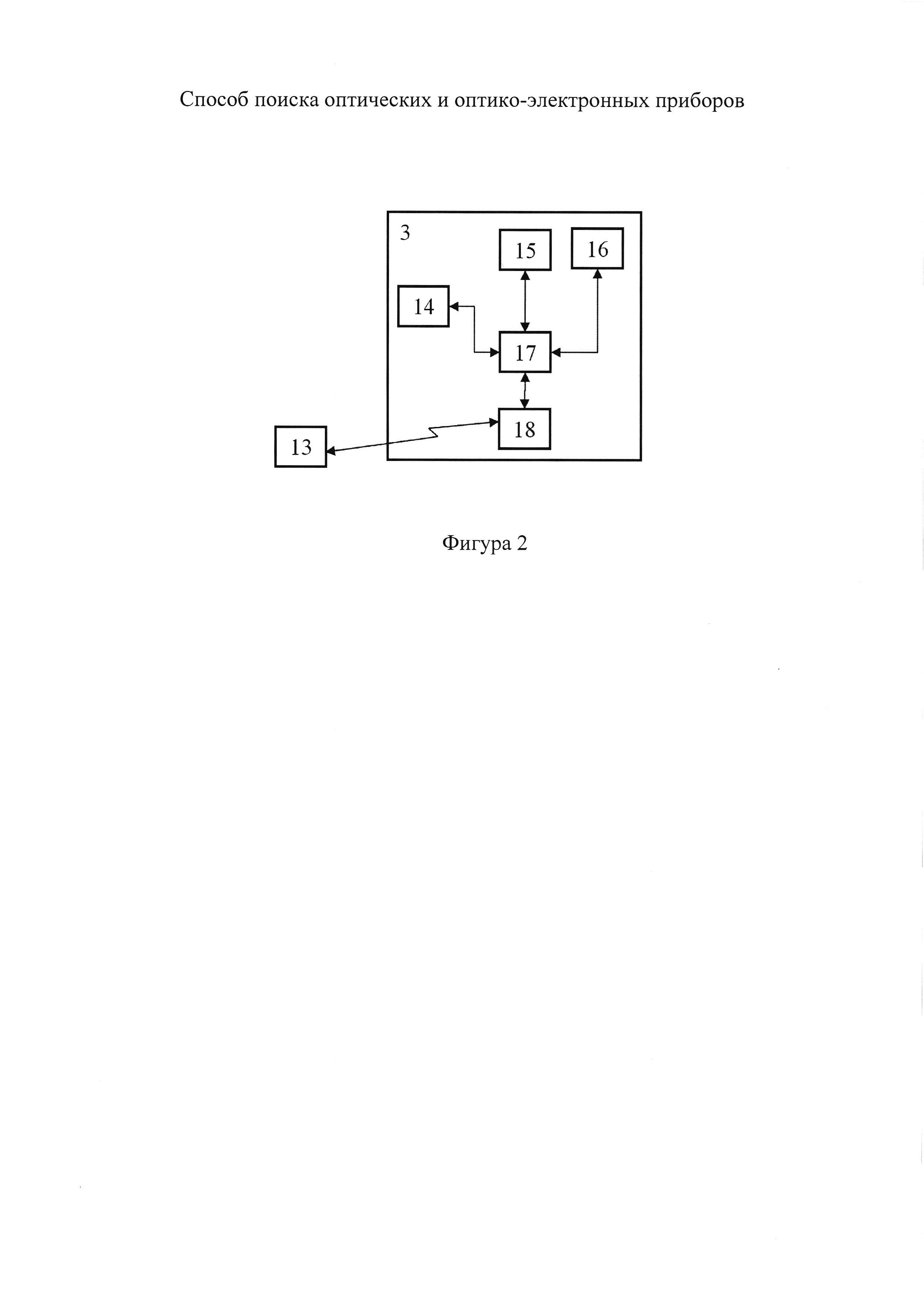
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства содержит: выносной блок управления ДПЛА 13, оптико-электронное передающее устройство 15, оптико-электронное приемное устройство 16, радионавигационный приемник 14, блок синхронизации, обработки и управления 17 и блок передачи данных 18, остальные обозначения соответствуют фигуре 2. Все бортовые устройства и блоки связаны линиями передачи данных.
Устройство функционирует следующим образом. Запускают ДПЛА 3 и управляют через блок передачи данных 18 с помощью выносного блока управления ДПЛА 13 траекторией его полета. По маршруту полета ДПЛА 3 ориентируют поля зрения оптико-электронных передающего и приемного устройств 15, 16 в текущий сектор поиска ООЭП. Оптико-электронное приемное устройство 16 по сигналу управления блока синхронизации, обработки и управления 17 осуществляет съемку текущего сектора поиска ООЭП и формирует его изображение, параметры которого передает в блок синхронизации, обработки и управления 17. Блок синхронизации, обработки и управления 17 запоминает параметры изображения, вырабатывает и передает сигналы управления в оптико-электронное передающее устройство 15 и оптико-электронное приемное устройство 16. Оптико-электронное передающее устройство 15 излучает оптический сигнал в направлении текущего сектора поиска ООЭП, а оптико-электронное приемное устройство повторно осуществляет его съемку и формирует изображение, параметры которого передает в блок синхронизации, обработки и управления 17. Блок синхронизации, обработки и управления 17 вычитает из параметров изображения с подсветом сектора поиска ООЭП запомненные параметры предыдущего изображения, результат сравнивает с эталонными значениями параметров отраженных сигналов от ООЭП и в случае их совпадения определяет угловые координаты ООЭП текущего сектора поиска и вырабатывает сигналы радионавигационному приемнику 14, который определяет текущие координаты своего местоположения и передает их значения в блок синхронизации, обработки и управления 17. Далее блок синхронизации, обработки и управления 17 повторяет перечисленный цикл для последующего этапа просмотра текущего сектора поиска ООЭП в процессе полета ДПЛА 3. По окончании поиска ООЭП в текущем секторе блок синхронизации, обработки и управления 17 определяет координаты ООЭП, формирует пакет данных координат ООЭП и передает его с помощью блока передачи данных 18 в выносной блок управления БПЛА 13. Далее осуществляется процедура поиска последующего сектора поиска ООЭП по маршруту полета ДПЛА 3.
Таким образом, предлагаемый способ позволяет за счет использования ДПЛА с установленными на борту элементами оптической локации, радионавигационного обеспечения и информационного обмена, осуществляющего полет по заданному маршруту для поиска ООЭП по секторам в определенной зоне с периодической поочередной съемкой без облучения и с облучением оптическим излучением секторов поиска ООЭП и корреляционной обработкой получаемых изображений, на основе которой обнаруживают и оценивают координаты размещения ООЭП относительно местоположения ДПЛА, позволяет расширить зону поиска и обнаружения ООЭП одним средством поиска ООЭП и обеспечить оценку их координат местоположения. Тем самым предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ поиска оптических и оптико-электронных приборов, основанный на облучении зоны предполагаемого расположения ООЭП оптическим излучением, приеме отраженного излучения, использовании ДПЛА с установленными на борту оптико-электронными передающим и приемным устройствами, радионавигационным приемником и блоком передачи данных, разбитии зоны поиска ООЭП на N секторов и формировании маршрута полета ДПЛА, запуске ДПЛА и управлении траекторией его полета по заданному маршруту, осуществлении периодической поочередной съемки без облучения и с облучением оптическим излучением n-го сектора поиска ООЭП, где  - номер сектора поиска ООЭП, формировании при каждой съемке n-го сектора поиска ООЭП изображения и запоминании его параметров, вычитании параметров in-го изображения, полученных без облучения n-го сектора поиска ООЭП из параметров jn-го изображения, полученных при облучении n-го сектора поиска ООЭП, где - номер изображения, полученного без облучения оптическим излучением n-го сектора поиска ООЭП, где - номер изображения, полученного при облучении оптическим излучением n-го сектора поиска ООЭП, j=i, I - общее количество пар изображений, полученных без облучения и при облучении оптическим излучением n-го сектора поиска ООЭП и формировании разностного ijn-го изображения ООЭП, сравнении параметров разностного ijn-го изображения ООЭП с эталонными значениями параметров отраженных сигналов от ООЭП, определении и запоминании при совпадении значений сравниваемых параметров kn-х координат ДПЛА и относительно их kn-х пеленгационных углов ООЭП в n-м секторе поиска ООЭП, где - номера координат ДПЛА и углов пеленгов, измеренных при совпадении параметров ijn-го разностного изображения ООЭП с эталонными с параметрами отраженных сигналов от ООЭП, определении при завершении просмотра n-го сектора поиска ООЭП координат местоположения ООЭП по координатам точки пересечения линий kn-х пеленгов ООЭП относительно kn-х координат местоположения ДПЛА в процессе его полета и повторении процедуры поиска ООЭП для n+1-го сектора поиска, передаче значений измеренных координат местоположения ООЭП на пункт управления ДПЛА.
- номер сектора поиска ООЭП, формировании при каждой съемке n-го сектора поиска ООЭП изображения и запоминании его параметров, вычитании параметров in-го изображения, полученных без облучения n-го сектора поиска ООЭП из параметров jn-го изображения, полученных при облучении n-го сектора поиска ООЭП, где - номер изображения, полученного без облучения оптическим излучением n-го сектора поиска ООЭП, где - номер изображения, полученного при облучении оптическим излучением n-го сектора поиска ООЭП, j=i, I - общее количество пар изображений, полученных без облучения и при облучении оптическим излучением n-го сектора поиска ООЭП и формировании разностного ijn-го изображения ООЭП, сравнении параметров разностного ijn-го изображения ООЭП с эталонными значениями параметров отраженных сигналов от ООЭП, определении и запоминании при совпадении значений сравниваемых параметров kn-х координат ДПЛА и относительно их kn-х пеленгационных углов ООЭП в n-м секторе поиска ООЭП, где - номера координат ДПЛА и углов пеленгов, измеренных при совпадении параметров ijn-го разностного изображения ООЭП с эталонными с параметрами отраженных сигналов от ООЭП, определении при завершении просмотра n-го сектора поиска ООЭП координат местоположения ООЭП по координатам точки пересечения линий kn-х пеленгов ООЭП относительно kn-х координат местоположения ДПЛА в процессе его полета и повторении процедуры поиска ООЭП для n+1-го сектора поиска, передаче значений измеренных координат местоположения ООЭП на пункт управления ДПЛА.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные и электротехнические узлы и устройства. В качестве оптико-электронного передающего устройства могут быть использованы источники оптического излучения, как газоразрядные лампы или матрицы полупроводниковых лазеров. Для приемного канала могут быть использованы камеры матричного типа с внешней синхронизацией режимов работы. Обработка изображений может быть реализована на основе котроллеров с алгоритмами корреляционной обработки базы данных.
Способ поиска оптических и оптико-электронных приборов, основанный на облучении зоны предполагаемого расположения оптических и оптико-электронных приборов оптическим излучением, приеме отраженного излучения, отличающийся тем, что используют дистанционно пилотируемый летательный аппарат с установленными на борту оптико-электронными передающим и приемным устройствами, радионавигационным приемником и блоком передачи данных, разбивают зону поиска оптических и оптико-электронных приборов на N секторов и формируют маршрут полета дистанционно пилотируемого летательного аппарата, запускают дистанционно пилотируемый летательный аппарат и управляют траекторией его полета по заданному маршруту, осуществляют периодическую поочередную съемку без облучения и с облучением оптическим излучением n-го сектора поиска оптических и оптико-электронных приборов, где - номер сектора поиска оптических и оптико-электронных приборов, при каждой съемке n-го сектора поиска оптических и оптико-электронных приборов формируют изображение и запоминают его параметры, вычитают параметры in-го изображения, полученные без облучения n-го сектора поиска оптических и оптико-электронных приборов из параметров jn-го изображения, полученных при облучении n-го сектора поиска оптических и оптико-электронных приборов, где - номер изображения, полученного без облучения оптическим излучением n-го сектора поиска оптических и оптико-электронных приборов, где - номер изображения, полученного при облучении оптическим излучением n-го сектора поиска оптических и оптико-электронных приборов, j=i, I - общее количество пар изображений, полученных без облучения и при облучении оптическим излучением n-го сектора поиска оптических и оптико-электронных и формируют разностное ijn-е изображения оптических и оптико-электронных приборов, параметры которого сравнивают с эталонными значениями параметров отраженных сигналов от оптических и оптико-электронных приборов, при совпадении значений сравниваемых параметров определяют и запоминают kn-е координаты местоположения дистанционного пилотируемого летательного аппарата и относительно их kn-е пеленгационные углы оптических и оптико-электронных приборов в n-м секторе поиска оптических и оптико-электронных приборов, где - номера координат дистанционного пилотируемого летательного аппарата и углов пеленгов, измеренных при совпадении параметров ijn-го разностного изображения оптических и оптико-электронных приборов с эталонными с параметрами отраженных сигналов от оптических и оптико-электронных приборов, при завершении просмотра n-го сектора поиска оптических и оптико-электронных приборов определяют координаты местоположения оптических и оптико-электронных приборов по координатам точки пересечения линий kn-х пеленгов оптических и оптико-электронных приборов относительно kn-х координат местоположения дистанционно пилотируемого аппарата в процессе его полета и повторяют процедуры поиска оптических и оптико-электронных приборов для n+1-го сектора поиска, передают значения измеренных координат местоположения оптических и оптико-электронных приборов на пункт управления дистанционно пилотируемого летательного аппарата.



Способ обеспечения посадки вертолета
Теплообменный аппарат
Способ определения процентного соотношения жидкой фазы в криогенном газожидкостном потоке
Способ ультразвукового контроля твердости полимеров
Способ извлечения тирозина и витамина b из водного раствора
Несущий винт вертолета
Глиссадный радиомаяк
Способ навигации подвижного объекта
Полосовой усилитель
Способ обработки сигналов в тракте высокой частоты радиоприемных устройств
Способ поражения объектов, прикрываемых аэрозольным образованием
Способ тягового заземления передвижных радиоэлектронных средств
Способ защиты средства спутниковой радиосвязи от самонаводящегося на радиоизлучение элемента поражения
Способ поражения объектов, прикрываемых аэрозольной завесой
Способ оптико-электронного противодействия
Способ определения координат местоположения источника радиоизлучения
Способ имитации теплового контраста объекта
Способ защиты объектов от поражения огневыми комплексами
Способ определения координат падения боеприпасов
Способ противодействия управляемым боеприпасам

