Результат интеллектуальной деятельности: Способ очистки орбит от объектов космического мусора
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике и может быть использовано для активного увода с рабочих орбит различного крупногабаритного космического мусора, например, отработавших ступеней ракет-носителей (ОС), используя для стыковки с этими объектами маневрирующие космические аппараты.
Известен способ активного спуска с орбит ОС, реализованный в виде устройства, например, «Космический аппарат для очистки космоса от пассивных КА и их фрагментов» RU №2141436 B64G 1/16.
Наиболее близким по своей технической сущности является патент RU №2531679 B64G 1/16, основанный на выведении космического аппарата-буксира (КАБ) и автономного стыковочного модуля (АСМ) в области орбит, предназначенных для их очистки от объектов космического мусора, последовательных маневров дальнего и ближнего наведения для стыковки и захвата объектов и их спуск на орбиты утилизации, выбор последовательности объектов из имеющихся на орбитах для их спуска на орбиты утилизации осуществляют путем последовательного сравнения значения критерия для каждого предполагаемого к спуску объекта, например, вероятности столкновения объекта с другими космическими объектами, кроме того, компенсацию накопленных ошибок параметров движения КАБ при предыдущих маневрах, а также системы целеуказания распределяют между корректирующими импульсами КАБ на этапе дальнего наведения и АСМ на участке самонаведения из условия обеспечения относительных параметров движения КАБ и объекта на начало этапа самонаведения АСМ, соответствующих вероятности стыковки и захвата объекта не ниже заданной.
К недостаткам этого технического решения относятся следующие позиции.
1) Как правило, ОС являются некооперируемыми объектами, вращающимися с угловой скоростью, которую необходимо обнулить после стыковки с АСМ, т.е. стабилизировать угловое движение связки «АСМ+ОС», используя двигательную установку (ДУ) АСМ. Рассматриваемое техническое решение не учитывает тот факт, что кинетический момент состыкованной связки «АСМ+ОС», определяемый произведением тензора инерции этой системы на вектор угловой скорости, должен быть таким, чтобы управляющие моменты, развиваемые двигательной установкой АСМ, могли его обнулить, учитывая ограничение по управляющим моментам, развиваемым двигательной установкой АСМ. Следовательно, необходимо принимать во внимание ограничение на инерционно-массовые и центровочные характеристики и кинематические параметры движения вокруг центра масс ОС, выбираемой в качестве объекта-кандидата для спуска с орбиты.
2) Не учитывается предельное время стабилизации жесткой системы «АСМ+ОС» с помощью двигательной установки АСМ, которое должно быть таким, чтобы угол разворота жесткой системы «АСМ+ОС» в каждом канале стабилизации на этапе стабилизации не превышал заданной величины, определяемой взаимным положением системы «АСМ+ОС», КАБ и положением троса.
3) Не учитывается возможность увеличения угловой скорости связки «КАБ+трос+АСМ+ОС» на этапе сближения «АСМ+ОС» и КАБ с помощью тросовой системы, вызванное начальным относительным движением центров масс ОС и КАБ, и соответствующее увеличение натяжение троса, которое может превысить его прочность.
4) Не учитывается требования к устойчивости и управляемости системы «КАБ+АСМ+ОС» на этапе спуска при помощи двигательной установки КАБ, которое накладывает ограничения на инерционно-массовые и центровочные характеристики ОС, двигательную установку КАБ.
5) Не учитывается возможность использования на этапе спуска двигательной установки АСМ в случае нехватки управляющих моментов КАБ.
Целью предлагаемого технического решения является устранение указанных недостатков прототипа, которая достигается тем, что в известный способ, основанный на выведении КАБ и АСМ в области орбит, предназначенных для их очистки от объектов космического мусора, последовательных маневров дальнего и ближнего наведения для стыковки и захвата объектов и их спуск на орбиты утилизации, выборе последовательности объектов, из имеющихся на орбитах для их спуска на орбиты утилизации, осуществляют путем последовательного сравнения значения критерия для каждого предполагаемого к спуску объекта, распределение компенсации накопленных ошибок параметров движения КАБ при предыдущих маневрах, а также системы целеуказания, между корректирующими импульсами КАБ на этапе дальнего наведения и АСМ на участке самонаведения из условия обеспечения относительных параметров движения КАБ и объекта на начало этапа самонаведения АСМ, вводят следующие дополнительные действия.
Выбор ОС осуществляют из следующих дополнительных условий:
1) собственный кинетический момент ОС не должен превышать заданного значения, определяемого управляющим моментом двигательной установки АСМ и заданным временем на обнуление этого кинетического момента;
2) кинетический момент системы «КАБ+трос+АСМ+ОС» на участке стягивания и торможения вращения не должны превышать заданных значений, определяемых управляющими моментами двигательных установок АСМ и КАБ;
3) при увеличении силы натяжения троса до критических значений задействуется двигательная установка КАБ, сила тяги которой направлена против силы натяжения, действующей на трос, для снижения ее уровня до допустимых значений;
4) управление движением системы «КАБ+АСМ+ОС» при маневре спуска на орбиту утилизации осуществляется с помощью двигательных установок КАБ и АСМ.
Реализация способа
Сущность предлагаемого способа поясняется схемами, представленными на фигурах, где
на фиг. 1 приведены отдельные объекты КАБ - 1, АСМ - 2, ОС - 3, трос - 4;
на фиг. 2 - система «АСМ+ОС» на тросовой связи с КАБ 1;
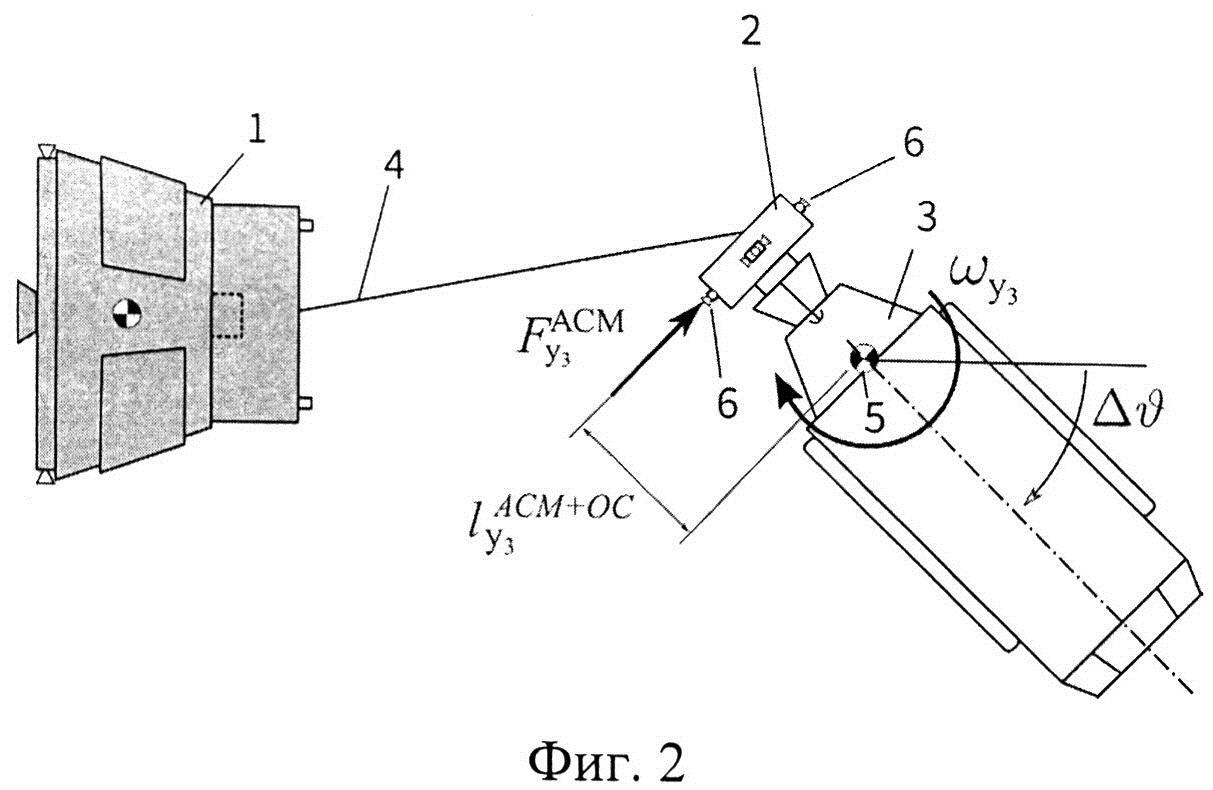
на фиг. 3 - система «КАБ+АСМ+ОС»;
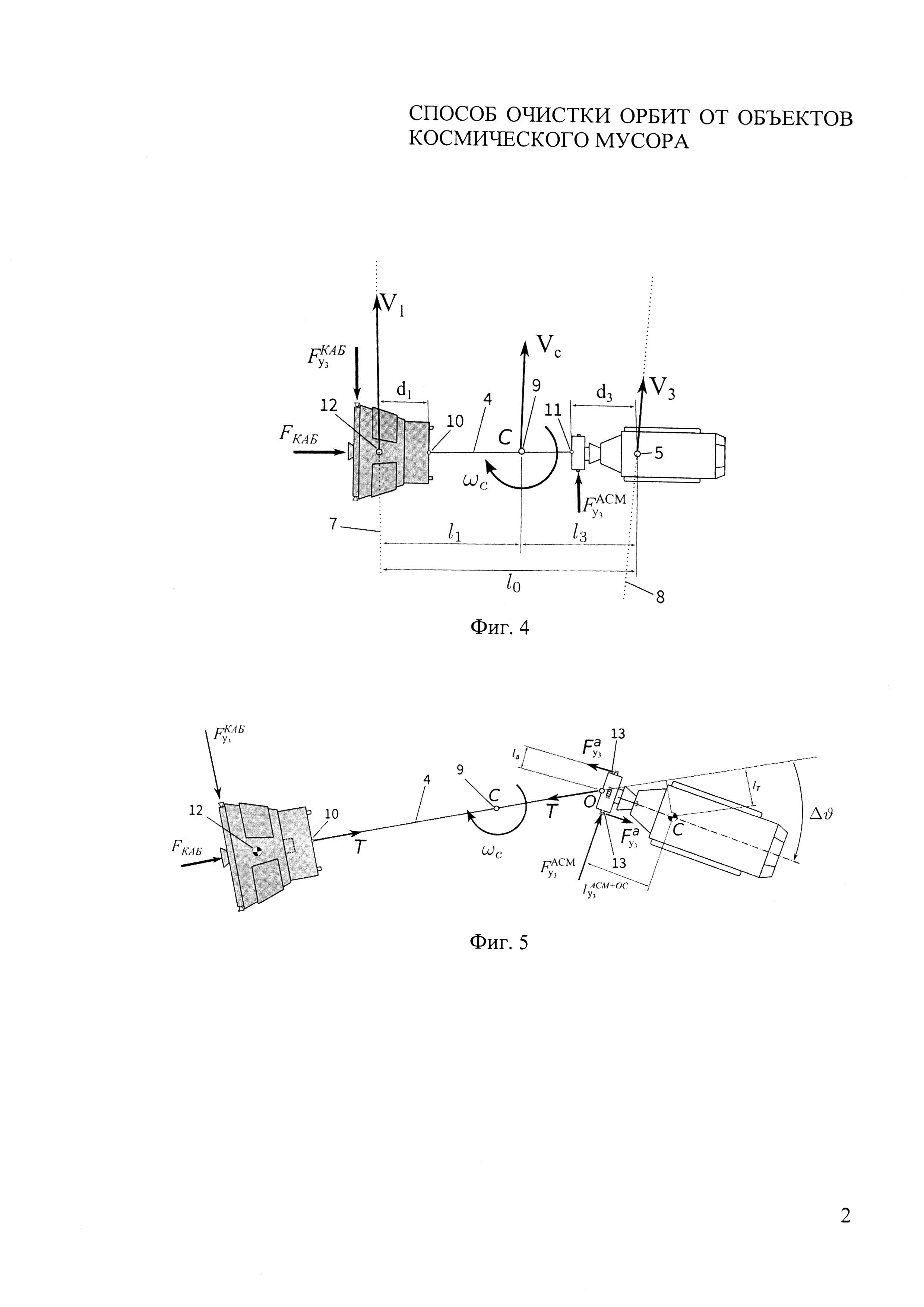
на фиг. 4 - процесс стягивания КАБ и «АСМ+ОС» с помощью троса;
на фиг. 5 - процесс стабилизации системы «АСМ+ОС» за счет приложения тяг камерами двигательной установки АСМ при стягивании с КАБ.
1) Ограничение на кинетический момент ОС.
Предположим, что угловые скорости ОС по осям ωх3, ωу3, ωz3 малы, так что членами, содержащими их произведение можно пренебречь, тогда угловое движение в каждом канале можно рассматривать независимо. Например, в канале рыскания (вращение вокруг оси ось  перпендикулярной плоскости фиг. 2) уравнение углового движения (уравнение Эйлера) можно записать в виде:
перпендикулярной плоскости фиг. 2) уравнение углового движения (уравнение Эйлера) можно записать в виде:

где  - момент инерции системы «АСМ+ОС» относительно оси , проходящей через ее центр масс 5,
- момент инерции системы «АСМ+ОС» относительно оси , проходящей через ее центр масс 5,  - угловое ускорение в канале рыскания,
- угловое ускорение в канале рыскания,  - управляющий момент в канале рыскания органов управления АСМ относительно центра масс 5 системы «АСМ+ОС». Знак минус в правой части показывает, что управляющий момент уменьшает угловую скорость «АСМ+ОС». Предполагается, что трос не оказывает влияние на движение системы «АСМ+ОС». В начальный момент времени угловая скорость системы:
- управляющий момент в канале рыскания органов управления АСМ относительно центра масс 5 системы «АСМ+ОС». Знак минус в правой части показывает, что управляющий момент уменьшает угловую скорость «АСМ+ОС». Предполагается, что трос не оказывает влияние на движение системы «АСМ+ОС». В начальный момент времени угловая скорость системы:
Начальное значение угловой скорости системы в момент начала торможения (t=0) для обнуления кинетического момента -  измеряется бортовой аппаратурой АСМ. Управляющий момент в канале рыскания органов управления АСМ определяется выражением:
измеряется бортовой аппаратурой АСМ. Управляющий момент в канале рыскания органов управления АСМ определяется выражением:

где:  - тяга двигателя 6 АСМ в канале рыскания,
- тяга двигателя 6 АСМ в канале рыскания,  - плечо управляющего момента относительно центра масс системы «АСМ+ОС».
- плечо управляющего момента относительно центра масс системы «АСМ+ОС».
Выражение для угловой скорости  и угла ϑ получаются в результате интегрирования уравнения (1) на интервале времени работы двигателей АСМ - от t0=0 до tК=Т:
и угла ϑ получаются в результате интегрирования уравнения (1) на интервале времени работы двигателей АСМ - от t0=0 до tК=Т:


где: ϑ0 - значения начального угла рыскания системы «АСМ+ОС» на момент начала работы двигателей. После окончания работы ДУ АСМ должно удовлетворяться условие:

а ограничение по изменению углового положения системы «АСМ+ОС» от углового положения АСМ на момент начала обнуления кинетического момента не должно быть более Δϑзад:

Выражая из (5) время обнуления кинетического момента, с учетом (3) получим:

Условие (6) принимает вид

или

Например, для связки (ОС+АСМ) с суммарным моментом инерции  кг⋅м2 плечом управляющего момента относительно центра масс системы «АСМ+ОС»
кг⋅м2 плечом управляющего момента относительно центра масс системы «АСМ+ОС»  м, тягой ДУ
м, тягой ДУ  Н и Δϑзад=π/2:
Н и Δϑзад=π/2:

Двигатели ориентации, применяемые на разгонных блоках и космических аппаратов (КА), имеют как правило небольшую тягу, поэтому полученное значение предельной угловой скорости (10) невелико. Учитывая задачи, возлагаемые на АСМ, целесообразно использовать для управления угловым движением ДУ большей тяги.
Как следует из условий (6)-(8) параметры процесса обнуления кинетического момента системы (АСМ+ОС) определяются:
- параметрами двигательной установки и конструкции АСМ;
- моментно-центровочными характеристиками ОС и АСМ;
- допустимым изменением углового положения системы «АСМ+ОС» до обнуления ее угловой скорости.
2) Ограничения на кинематические параметры относительного движения КАБ и «АСМ+ОС».
Из-за относительного движения центров масс объектов КАБ и связки «АСМ+ОС» (фиг. 4), поскольку «КАБ+АСМ» и ОС до стыковки двигались по своим орбитам (поз. 7 и 8 фиг. 4), после стыковки и образования связки «АСМ+ОС» система «КАБ+трос+АСМ+ОС» будет вращаться вокруг общего центра масс 9 с угловой скоростью ωc0. Угловая скорость будет увеличиваться с уменьшением длины троса вследствие закона сохранения кинетического момента. Например, при стыковке АСМ и КАБ, движущихся по эллиптической орбите h1p×h1a с ОС, движущейся в той же плоскости по круговой орбите с высотой h3a=hla, разность скоростей в общей точке двух орбит будет определяться выражением1 (1 Суханов А.А. Астродинамика / А.А. Суханов - М.: Институт Космических исследований РАН, 2010):
где r3=р3=r1a - радиус орбиты ОС и радиус апогея КАБ, μ=3.986⋅105 км3/с2 - гравитационная постоянная Земли, р3 - фокальный параметр орбиты КАБ, е - эксцентриситет орбиты КАБ е=(r1a-r1p)/(r1a+r1p), r1p - радиус перигея орбиты КАБ. Для ha=900 км, hp=600 км разность скоростей (11) достигает 78 м/с.
Начальная угловая скорость связки «КАБ+трос+АСМ+ОС» будет определяться выражением:

где  - начальное расстояние между центрами масс КАБ и АСМ с ОС, определяемое длиной троса
- начальное расстояние между центрами масс КАБ и АСМ с ОС, определяемое длиной троса  , где d1 - расстояние от центра масс КАБ 12 до точки закрепления 10 троса на КАБ, d3 - расстояние от центра масс 5 связки АСМ и ОС до точки закрепления 11 троса на АСМ. Для
, где d1 - расстояние от центра масс КАБ 12 до точки закрепления 10 троса на КАБ, d3 - расстояние от центра масс 5 связки АСМ и ОС до точки закрепления 11 троса на АСМ. Для  км начальная угловая скорость (12) будет равна:
км начальная угловая скорость (12) будет равна:

Связка «КАБ+трос+ОС+АСМ» будет вращаться вокруг общего центра масс 9. Начальный момент инерции связки, как системы материальных точек (без учета собственных моментов инерции тел) относительно центра масс связки «КАБ+трос+ОС+АСМ» будет определяться выражением2 (2 Маркеев А.П. Теоретическая механика: Учебник для университетов. - М.: Регулярная и хаотическая динамика, 1999):
где m - приведенная масса связки «КАБ+трос+АСМ+ОС»:

 - расстояние от центра масс 9 связки «КАБ+трос+АСМ+ОС» до центра масс КАБ 12,
- расстояние от центра масс 9 связки «КАБ+трос+АСМ+ОС» до центра масс КАБ 12,  - расстояние от центра масс 9 связки «КАБ+трос+АСМ+ОС» до центра масс 5 связки АСМ с ОС. Выражение для кинетического момента связки «КАБ+трос+ОС+АСМ» относительно ее центра масс после стыковки будет иметь вид2 (2 Маркеев А.П. Теоретическая механика: Учебник для университетов. - М.: Регулярная и хаотическая динамика, 1999):
- расстояние от центра масс 9 связки «КАБ+трос+АСМ+ОС» до центра масс 5 связки АСМ с ОС. Выражение для кинетического момента связки «КАБ+трос+ОС+АСМ» относительно ее центра масс после стыковки будет иметь вид2 (2 Маркеев А.П. Теоретическая механика: Учебник для университетов. - М.: Регулярная и хаотическая динамика, 1999):

В соответствии с законом сохранения кинетического момента системы:

при уменьшении длины троса, момент инерции связки (J) будет уменьшаться, а угловая скорость будет увеличиваться. При длине троса  угловая скорость будет равна:
угловая скорость будет равна:

Модуль кинетического момента системы «КАБ+трос+АСМ+ОС» после ее формирования и до стыковки КАБ с АСМ и ОС необходимо уменьшить, используя двигательные установки управления угловым движением КАБ -  и АСМ -
и АСМ -  (фиг. 4). Силы, создаваемые двигательными установками управления угловым движением КАБ и АСМ, должны лежать в одной плоскости и направлены в противоположные стороны, создавая момент относительно центра масс связки, противоположный направлению вращения связки.
(фиг. 4). Силы, создаваемые двигательными установками управления угловым движением КАБ и АСМ, должны лежать в одной плоскости и направлены в противоположные стороны, создавая момент относительно центра масс связки, противоположный направлению вращения связки.
3) Определим силу тяги, необходимую для гашения угловой скорости тросовой системы. Для простоты предположим, что угловая скорость тросовой системы уменьшается только за счет действия силы тяги АСМ -  (фиг. 4). Влиянием
(фиг. 4). Влиянием  на движение центра масс связки пренебрегаем. Одновременно с уменьшением угловой скорости связки уменьшается длина троса. Предположим, что расстояние между центрами масс КАБ 12 и связки АСМ с ОС 5 уменьшается по линейному закону:
на движение центра масс связки пренебрегаем. Одновременно с уменьшением угловой скорости связки уменьшается длина троса. Предположим, что расстояние между центрами масс КАБ 12 и связки АСМ с ОС 5 уменьшается по линейному закону:
где k - скорость изменения длины троса.
Теорема об изменении кинетического момента системы, состоящей из двух материальных точек с массами mАСМ+mОС и mКАБ, соединенных тросом и вращающегося вокруг общего центра масс будет иметь вид:

Момент инерции тросовой систем относительно ее центра масс определяется следующим образом

Подставляя (20) в (19), обозначив m3=(mАСМ+mОС) получим следующее дифференциальное уравнение:

или

Интегрируя уравнение (22) получим оценку тяги  , необходимую для гашения угловой скорости тросовой системы при выбранном законе изменения длины троса:
, необходимую для гашения угловой скорости тросовой системы при выбранном законе изменения длины троса:

где . При массе КАБ=1000 кг, массы ОС с АСМ mАСМ+mОС=4000 кг, начальной угловой скорости тросовой системы ω0=10°/с,
. При массе КАБ=1000 кг, массы ОС с АСМ mАСМ+mОС=4000 кг, начальной угловой скорости тросовой системы ω0=10°/с,  м,
м,  м и tk=500 с, тяга АСМ должна быть
м и tk=500 с, тяга АСМ должна быть

Сила  будет создавать момент относительно центра масс связки АСМ и ОС, что приведет к увеличению угла Δϑ между продольной осью АСМ и линией троса (фиг. 4) и снижению эффективности гашения угловой скорости тросовой системы, вследствие изменения направления силы
будет создавать момент относительно центра масс связки АСМ и ОС, что приведет к увеличению угла Δϑ между продольной осью АСМ и линией троса (фиг. 4) и снижению эффективности гашения угловой скорости тросовой системы, вследствие изменения направления силы  по отношению к тросу.
по отношению к тросу.
Действие силы  на относительное движение троса и связки АСМ с ОС (или КАБ, если для гашения угловой скорости тросовой системы используется ДУ КАБ) может быть компенсировано моментом создаваемыми двигателями ориентации АСМ -
на относительное движение троса и связки АСМ с ОС (или КАБ, если для гашения угловой скорости тросовой системы используется ДУ КАБ) может быть компенсировано моментом создаваемыми двигателями ориентации АСМ -  13 (фиг. 5). Тяга
13 (фиг. 5). Тяга  будет зависеть от угла между линией троса и продольной осью АСМ и от силы натяжения троса Т. Предполагая малость углового ускорения тросовой системы, из условия равенства нулю суммы моментов от силы натяжения троса, силы
будет зависеть от угла между линией троса и продольной осью АСМ и от силы натяжения троса Т. Предполагая малость углового ускорения тросовой системы, из условия равенства нулю суммы моментов от силы натяжения троса, силы  и сил двигателей ориентации 13:
и сил двигателей ориентации 13:

Угловая скорость вращения связки КАБ и АСМ с ОС на тросовой связи вокруг общего центра масс 9 приводит к возникновению в тросе 4 растягивающего усилия Т (фиг. 5), которое не должно превышать предельного значения, определяемого прочностными характеристиками троса и узлов его крепления на КАБ 10 и АСМ 11.
Рассмотрим движение КАБ вокруг центра масс тросовой системы. КАБ движется по окружности радиуса
 .
.
Центростремительное ускорение КАБ, равное произведению квадрата угловой скорости тросовой системы и расстояния от ее центра масс 9 до центра масс КАБ3 (3 Маркеев А.П. Теоретическая механика: Учебник для университетов. - М.: Регулярная и хаотическая динамика, 1999) 12 (фиг. 5), создается силой натяжения троса Т, которая равна произведению центростремительного ускорения КАБ и его массы:

Для троса с площадью поперечного сечения S, изготовленного из материала с известным предельным напряжением [σ], угловая скорость связки вокруг центра масс не должна превышать значения:

Для уменьшения силы натяжения троса может быть использован главный (маршевый) двигатель КАБ, создающий тягу FKAБ (фиг. 5), направленную вдоль линии троса. Ускорение КАБ, создаваемое силой натяжения троса, может быть уменьшено на величину ускорения, создаваемого ДУ КАБ:
 ,
,
при этом суммарное ускорение будет равно центростремительному ускорению при движении КАБ вокруг центра масс связки 9 (фиг. 5).
С учетом действия двигателя КАБ условие (27) примет вид:

Например, при суммарной массе АСМ и ОС mАСМ+mОС=4000 кг, массе КАБ mКАБ=1000 кг, тяге двигателя КАБ FKAБ=3000 Н угловая скорость системы с тросом диаметром 4 мм из материала с [σ]=3 ГПа (трос из материала Spectra-1000 с плотностью 0,97 г/см3) и длиной 1 км должна быть не более:

4) Возможности двигательной установки КАБ по обеспечению устойчивости и управляемости системы «КАБ+АСМ+ОС» при реализации маневра для перехода на орбиту спуска.
Предполагается, что расположение объектов КАБ, АСМ, ОС в системе «КАБ+АСМ+ОС» соответствует фиг. 3 поз. 1, 2, 3: продольные оси всех объектов и центры масс находятся на общей продольной оси системы «КАБ+АСМ+ОС» (поз. 14, фиг. 3), а направления осей связанной с АСМ системой координат совпадает с направлением связанных осей КАБ, т.е. управляющие моменты КАБ совпадают с управляющими моментами АСМ.
Из-за возможного появления возмущающих моментов, обусловленных:
- появлением смещения центра масс системы «КАБ+АСМ+ОС» (поз. 15, фиг. 3) в поперечной плоскости;
- наличием остатков жидкого топлива в баках ОС и т.д.,
необходимо обеспечение условия управляемости и качества процесса стабилизации, соответственно, точности отработки импульса маневра спуска двигательной установкой КАБ, за счет управляющих моментов КАБ - MF. Должно выполняться условие:

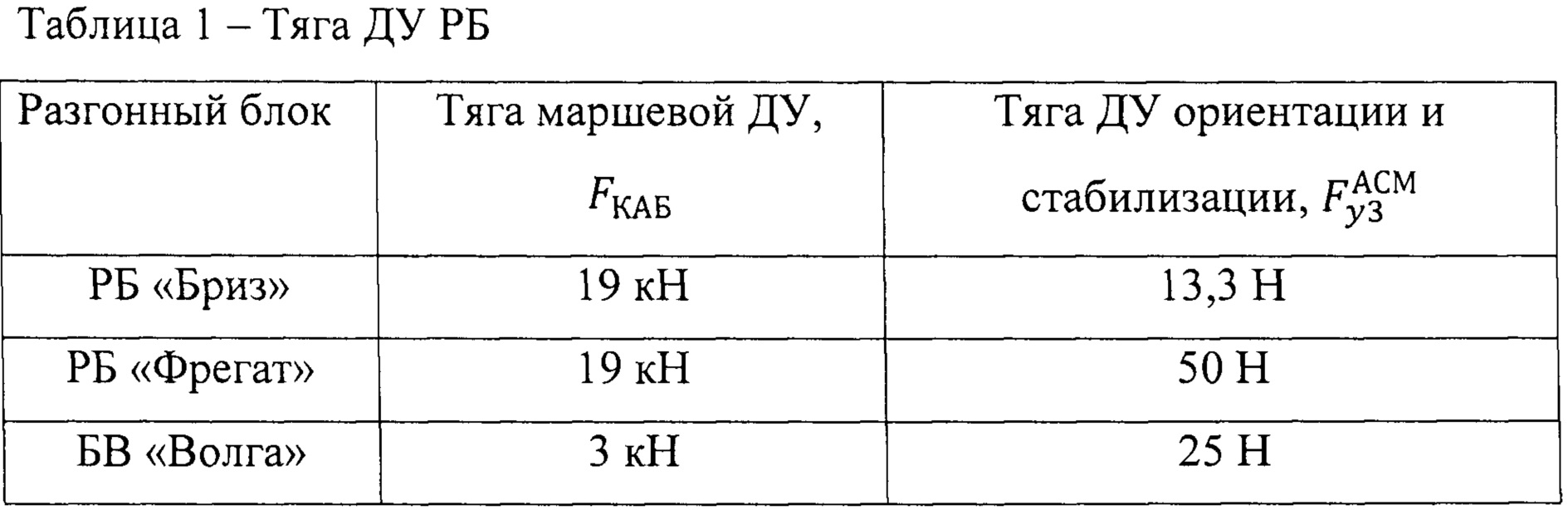
Для тяги главного двигателя КАБ FКАБ=3000 Н и максимального смещения центра масс системы δ=0,05 м суммарный момент MF, создаваемый двигателями ориентации, должен быть не менее 150 Н⋅м, что на плече h от 3 до 4 м соответствует тяге FKAБ от 38 до 50 Н.
Как было отмечено выше, двигатели ориентации, применяемые на существующих в настоящее время разгонных блоках (РБ), как правило, имеют меньшую тягу, и не предназначены парирования возмущений такого уровня (таблица 1), поэтому управление движением «КАБ+АСМ+ОС» предлагается осуществлять за счет двигательной установки КАБ (маршевый и рулевые сопла ориентации и стабилизации) и дополнительное использование двигательной установки и системы управления АСМ -  .
.
Использование предлагаемого технического решения позволит выбрать ОС с учетом не только критериев опасности столкновения с другими космическими объектами, но и с учетом возможностей КАБ, АСМ.
Способ очистки орбит от объектов космического мусора, основанный на выведении космического аппарата-буксира (КАБ) и автономного стыковочного модуля (АСМ) в области орбит, предназначенных для их очистки от объектов космического мусора, например отработавших ступеней ракет-носителей (ОС), последовательных маневрах дальнего и ближнего наведения для стыковки и захвата ОС и их спуска на орбиты утилизации, выборе последовательности ОС путем последовательного сравнения значения критерия для каждой предполагаемой ОС, например вероятности столкновения ОС с другими космическими объектами, отличающийся тем, что ОС дополнительно выбирают из условий, чтобы собственный кинетический момент ОС не превышал заданного значения, определяемого управляющим моментом двигательной установки АСМ и заданным временем на обнуление этого кинетического момента, а кинетический момент системы КАБ+трос+АСМ+ОС на участке стягивания и торможения вращения не превышал заданных значений, определяемых управляющими моментами двигательных установок АСМ и КАБ, обеспечивающих его обнуление, при этом торможение связки осуществляют с использованием двигательной установки АСМ, при увеличении силы натяжения троса до критических значений прикладывают продольный импульс двигательной установки КАБ, направленный против силы натяжения, до снижения ее до значения, определяемого прочностью троса, управление движением системы КАБ+АСМ+ОС при маневре спуска на орбиту утилизации осуществляют с помощью двигательных установок КАБ и АСМ.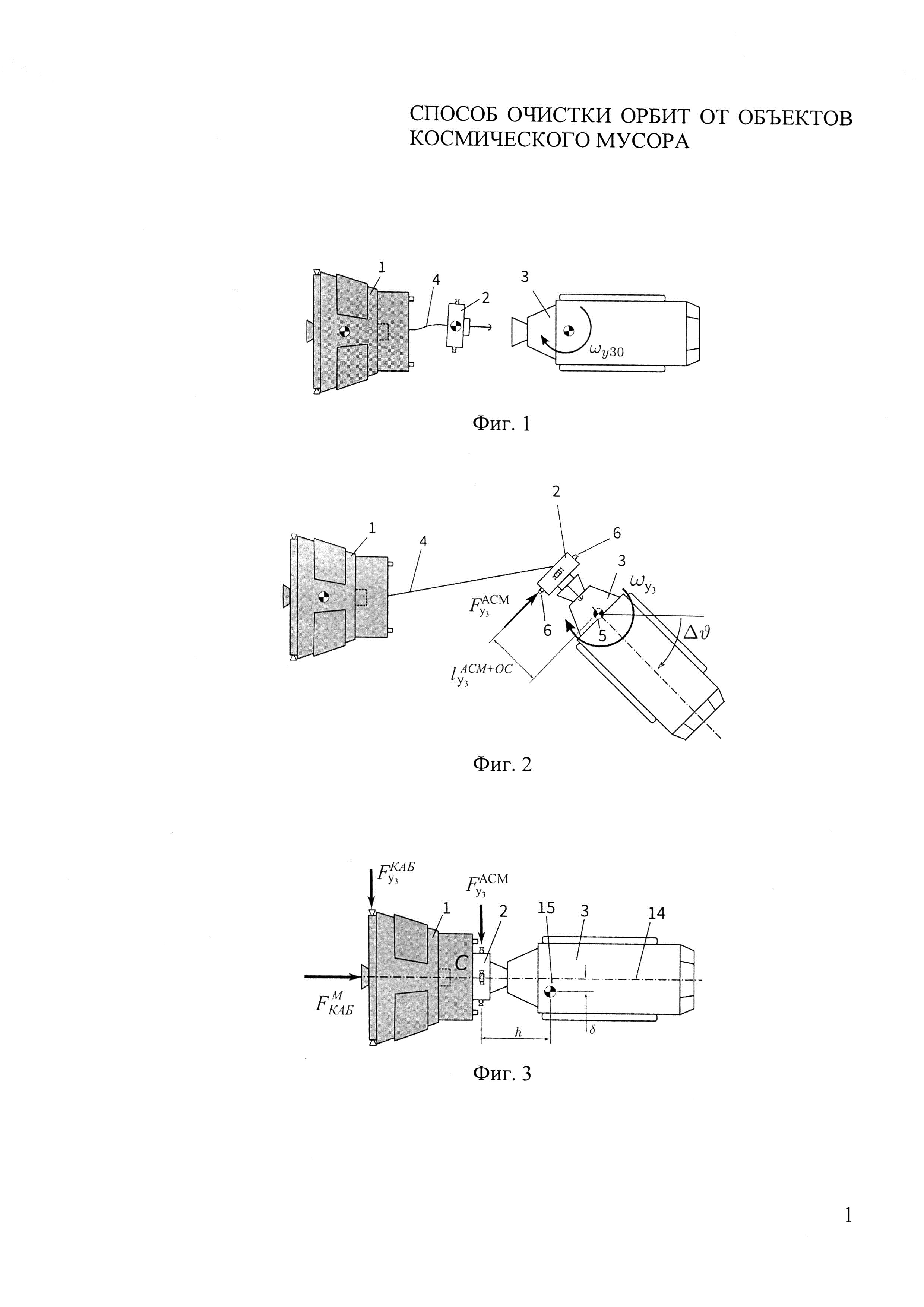
Способ тестирования арсенид-галиевых фотопреобразователей в составе солнечных батарей и устройство для его реализации
Способ наземной эксплуатации системы электропитания космического аппарата
Способ ориентации космического аппарата в солнечно-земной системе координат
Радиоэлектронный блок теплонагруженный
Катод плазменного ускорителя
Противоточный теплообменник
Космический аппарат
Способ термостатирования бортовой аппаратуры полезного груза, размещенного внутри головного обтекателя космической головной части ракеты космического назначения, и устройство для его реализации
Способ изготовления статора электрической машины
Теплозащитное покрытие
Способ увода космического мусора с орбит полезных нагрузок на основе использования отделившейся части ракеты-носителя, разгонного блока и устройство для его реализации
Способ проведения лётно-конструкторских испытаний бортовой системы испарения остатков жидкого топлива в баке отработавшей ступени ракеты-носителя
Металлообрабатывающий станок
Способ увода отделившейся части ракеты-носителя с орбиты полезной нагрузки и двигательная установка для его осуществления
Способ минимизации зон отчуждения для отделяемых частей ракет-носителей
Способ спуска отделяющейся части ступени ракеты космического назначения и устройство для его осуществления
Способ минимизации зон отчуждения для отделяемых частей ракет-носителей и устройство для его реализации
Головной обтекатель ракеты-носителя
Способ газификации невырабатываемых остатков жидкого кислорода и керосина в баках ступени ракеты-носителя и устройство для его реализации
Способ спуска отделяющейся части ступени ракеты-носителя и устройство для его осуществления

