Приводной механизм с переключением передачи
Вид РИД
Изобретение
Область техники
Изобретение относится к механическим передачам и может найти применение, в частности, в приводах грузоподъемных лебедок (крановых, буровых) и транспортных средств повышенной проходимости.
Уровень техники
Известен приводной механизм, содержащий две планетарные передачи, солнечные шестерни которых закреплены на валах двух двигателей, а сателлиты - на общем остановленном водиле, при этом сателлиты выполнены двухвенцовыми, одни из венцов находится в зацеплении с соответствующими солнечными колесами, а другие в зацеплении с коронным колесом корпуса барабана лебедки, [пат. RU 2225350 опуб. 10.03.2004].
Механизм по патенту RU 2225350 позволяет суммировать мощности двух приводных двигателей, но не имеет возможности изменять выходной крутящий момент и скорость вращения путем переключения передачи.
Известен приводной механизм с переключением передачи, выполненный на основе дифференциала с одним входом и двумя выходами [пат. RU 2531427 опубл. 20.10.2014]. Вход дифференциала соединен с валом приводного двигателя, а оба выхода подключаются к ведомому валу, один непосредственно, а второй - через переключаемую силовую муфту скольжения. Муфта служит для торможения второго выхода дифференциала, что используется для уменьшения скорости вращения и увеличения крутящего момента ведомого вала.
Недостатки устройства по патенту RU2531427:
- ограниченный диапазон регулирования скорости вращения ведомого вала и исполнительного механизма из-за падения КПД приводного двигателя при скоростях вращения двигателя, значительно отклоняющихся от номинальной;
- разрыв кинематической схемы и передаваемой мощности при переключении передачи с помощью муфты, что в ряде применений (например, в грузоподъемных лебедках) недопустимо.
Известен приводной механизм с переключением передачи, используемый в грузоподъемной лебедке кранов КБ-405, КБ-401Б [Л.А. Невзоров, Г.Н. Пазельский, В.А. Романюха. Башенные краны. 1980, стр. 93, 94, рис. 60]. Известный механизм содержит редуктор и коробку передач, переключение которой допускается только при остановленной лебедке. Во избежание разрыва кинематической схемы, сопровождающегося падением груза, механизм снабжен блокировочным устройством, которое не позволяет переключать лебедку на ходу, включать ее при неполном зацеплении зубьев шестерен любой передачи и выключать установленное зацепление при работе лебедки.
Недопустимость переключения передач на ходу существенно снижает возможности ручного или автоматизированного управления приводом, т.к. требует выбрать передачу до определения массы груза (или величины нагрузки иного вида) при заблокированном приводе.
Известен приводной механизм с переключением передачи, содержащий суммирующий дифференциал, выход которого предназначен для соединения с исполнительным механизмом (нагрузкой), а два входа, по меньшей мере, один из которых снабжен тормозом, кинематически соединены с валами двух приводных двигателей [Л.А. Невзоров, Г.Н. Пазельский, В.А. Романюха, Башенные краны. 1980 стр. 91 рис. 58, стр. 92 рис. 59].
Этот механизм позволяет переключать передаточное отношение на ходу без разрыва кинематического соединения исполнительного механизма (лебедки) с приводными двигателями и выбран в качестве прототипа заявляемого устройства.
Функциональная схема прототипа приведена на фиг. 1. На схеме показаны суммирующий дифференциал D, входы которого, через передаточные цепи К1 и К2 кинематически соединены с валами двигателей M1 иМ2.
Назначение и основная функция суммирующего дифференциала состоит в алгебраическом суммировании (т.е. сложении или вычитании) вращений, подведенных к двум его входам.
Цепь К2, передаточное отношение которой меньше, чем передаточное отношение цепи К1, снабжено тормозом Т1. Переключение передачи на силовую (с большим выходным моментом) выполняется следующим образом. Двигатель М2 снижает обороты до нуля. После этого на одно из звеньев в цепи К2 или вал двигателя М2 накладывают тормоз Т1, препятствующий вращению вала под действием реактивного момента от нагруженной лебедки, приведенного с выхода дифференциала D. В результате дифференциал D переходит в режим редуктора, вращающего нагруженный выход (вал) дифференциала D с пониженной скоростью и увеличенным приведенным моментом от двигателя Ml. Поскольку при этом вал двигателя М2 заторможен, этот двигатель выведен из работы. Тормоз Т2 используется в качестве стояночного.
Недостаток прототипа - неэффективное использование установленной мощности приводных двигателей.
Сущность изобретения
Предметом изобретения является приводной механизм с переключением передачи, содержащий первый суммирующий дифференциал, выход которого предназначен для соединения с исполнительным механизмом, а два входа, по меньшей мере, один из которых снабжен тормозом, блокирующим передачу реактивного момента от нагрузки, кинематически соединены с валами двух приводных двигателей, отличающийся тем, что указанное кинематическое соединение содержит раздаточный блок, способный распределять между двумя своими выходами суммарную мощность приводных двигателей, кинематически соединенных с двумя входами раздаточного блока.
Это позволяет получить технический результат изобретения - повысить эффективность использования установленной мощности двигателей в приводном механизме с переключением передачи.
Изобретение имеет первое развитие, уточняющее выполнение раздаточного блока, охарактеризованного выше на уровне функционального обобщения, необходимого для достижения технического результата. Первое развитие состоит в том, что раздаточный блок выполнен в виде второго и третьего суммирующих дифференциалов, выходы которых служат выходами раздаточного блока, а каждый из четырех входов кинематически соединен с одним из входом раздаточного блока, при этом указанные кинематические соединения выполнены так, что одно из четырех передаточных отношений от каждого входа раздаточного блока до каждого его выхода противоположно по знаку трем другим передаточным отношениям.
Изобретение имеет второе развитие, относящееся к частному случаю выполнения дифференциалов в заявляемом механизме. Второе развитие состоит в том, что каждый из трех указанных дифференциалов выполнен в виде планетарного механизма, содержащего корпус, на котором закреплены внутреннее и внешнее зубчатые колеса, размещенные внутри корпуса водило, вал которого закреплен в корпусе с возможностью вращения и служит выходом дифференциала, сателлиты, оси которых закреплены на водиле, и установленная в зацеплении с сателлитами солнечная шестерня, вал которой служит первым входом дифференциала, а его вторым входом служит внешнее зубчатое колесо, при этом внешние зубчатые колеса корпусов второго и третьего дифференциалов установлены в зацеплении друг с другом.
Изобретение имеет третье развитие, относящееся к частному случаю выполнения кинематических соединений в заявляемом механизме. Третье развитие состоит в том, что солнечная шестерня первого дифференциала и водило второго дифференциала установлены на общем валу, на валах солнечных шестерен второго и третьего дифференциалов установлены первая и вторая дополнительные шестерни соответственно, кинематически соединенные через дополнительное зубчатое колесо, на валу водила третьего дифференциала установлено второе дополнительное зубчатое колесо, которое через третью дополнительную зубчатую шестерню, вал которой снабжен тормозом, кинематически соединено с внешним зубчатым колесом корпуса первого дифференциала.
Краткое описание фигур
На фиг. 1 представлена функциональная схема прототипа, на фиг. 2 -обобщенная функциональная схема заявляемого устройства с учетом первого развития изобретения. Фиг. 3 и фиг. 4 иллюстрируют пример осуществления изобретения с учетом всех его развитий.
Осуществление изобретения с учетом его развитий
Описываемый ниже приводной механизм, его кинематические соединения и их звенья предназначены для передачи вращательного движения. В описании принято, что передаточное отношение кинематического соединения, понижающего скорость вращения, по модулю больше единицы. Знак передаточного отношения определяется как положительный, если вращение передается с сохранением его направления (т.е. входной и выходной валы вращаются, например, по часовой стрелке) и как отрицательный в противоположном случае.
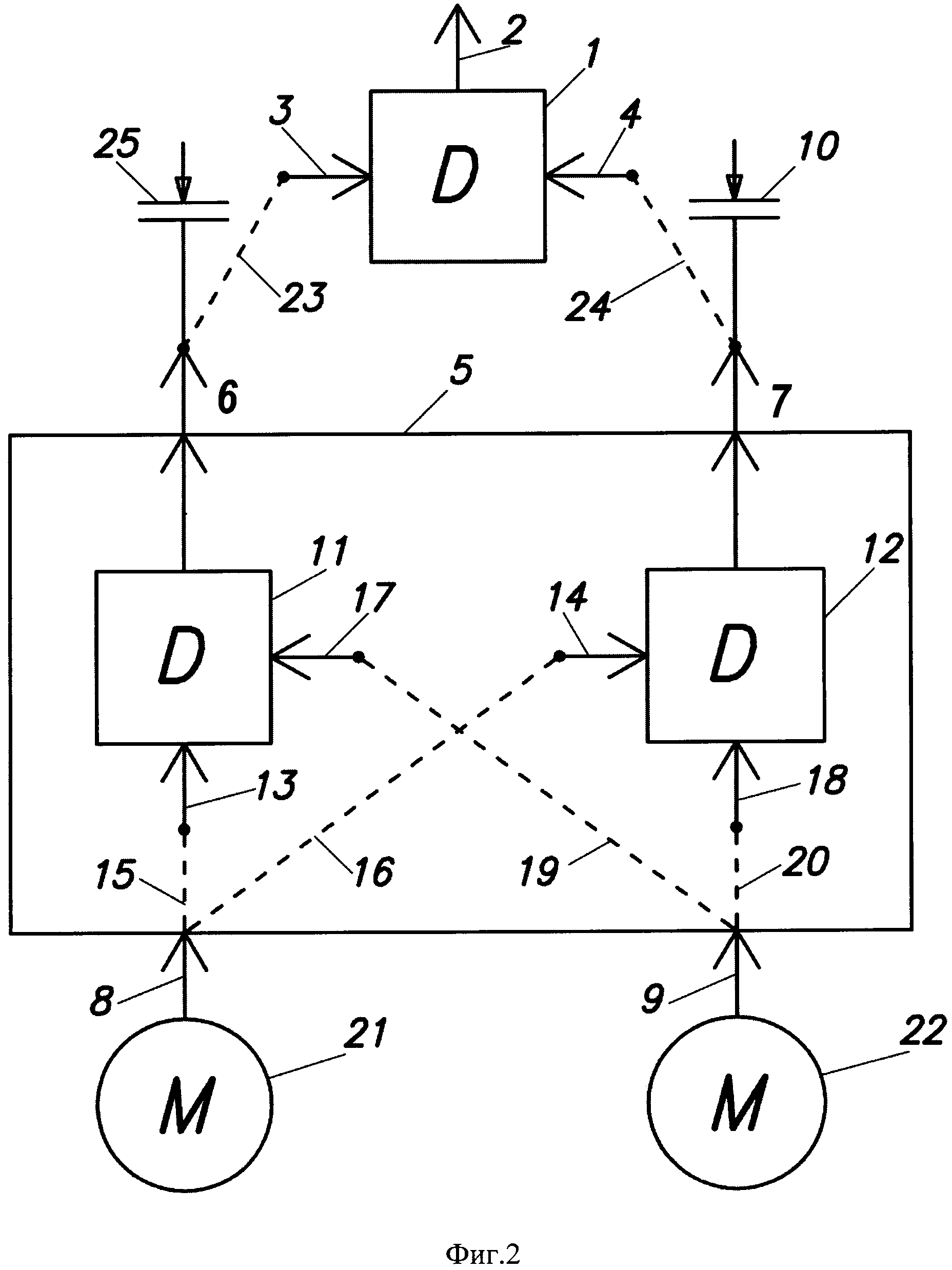
На фиг. 2 обозначено:
1 - первый суммирующий дифференциал, выход 2 которого предназначен для соединения с исполнительным (приводимым) механизмом;
3 и 4 - входы дифференциала 1;
5 - раздаточный блок, имеющий выходы 6, 7, первый вход 8 и второй вход 9;
10 - тормоз, блокирующий передачу реактивного момента нагрузки с выхода 2 дифференциала 1;
11 и 12 - второй и третий суммирующие дифференциалы, входящие в состав блока 5, выходы которых служат выходами 6 и 7 блока 5;
13 и 14 - первые входы дифференциалов 11 и 12, связанные с первым входом 8 блока 5 через кинематические соединения 15 и 16 (обозначены на фиг. 2 пунктирными линиями) соответственно;
17 и 18 - вторые входы дифференциалов 11 и 12, связанные со вторым входом 9 блока 5 через кинематические соединения 19 и 20 (обозначены на фиг. 2 пунктирными линиями) соответственно.
Блок 5 характеризуется четырьмя передаточными отношениями: от входа 8 до выхода 6 (k8÷6) от входа 8 до выхода 7 (k8÷7), от входа 9 до выхода 6 (k9÷6) и от входа 9 до выхода 7 (k9÷7). Передаточные отношения от каждого входа до каждого выхода блока 5 определяются при остановленном другом входе блока 5 и учитывают коэффициенты передачи внутри дифференциалов 11 и 12.
Одно из указанных передаточных отношений (например, k9÷7 от входа 9 до выхода 7) устанавливается противоположным по знаку остальным. Для этого соответствующим образом (с учетом знаков внутренних передаточных отношений дифференциалов 11 и 12) задаются знаки передаточных отношений кинематических соединений 15, 16, 19 и 20. (например, знак отношения k9÷7 задается соответствующим выполнением соединения 20).
Как будет показано ниже, описанный выше блок 5 способен распределять между своими выходами 6 и 7 подведенную к его входам 8 и 9 суммарную мощность приводных двигателей 21 и 22 в зависимости от отношения их скоростей вращения.
Выходы 6 и 7 блока 5 подведены ко входам 3 и 4 дифференциала 1 через кинематические соединения 23 и 24 соответственно.
Вход 4 дифференциала 1 снабжен тормозом 10, который может быть установлен на входе 4, одном из звеньев соединения 24 или на выходе 7, исходя из конструктивного удобства. Для того, чтобы установленный таким образом тормоз 10 выполнял функцию блокировки реактивного момента нагрузки (необходимую как в прототипе, так и в заявляемом устройстве), передаточное отношение через соединение 24 и вход 4 дифференциала 1 до выхода 2 задается меньшим, чем аналогичное передаточное отношение через звено 23 и другой вход 3 дифференциала 1.
Заявляемое устройство, выполненное с учетом первого развития, работает следующим образом (фиг. 2).
В соответствии с назначением суммирующих дифференциалов их функция состоит в алгебраическом суммировании (т.е. сложении или вычитании) вращений, и соответственно скорость вращения на выходе каждого суммирующего дифференциала равна алгебраической сумме приведенных к выходу скоростей вращения на его входах.
Следовательно, скорости вращения на выходах 6 и 7 коробки 5, являющихся выходами дифференциалов 11 и 12, равны алгебраической сумме приведенных скоростей вращения на входах 8 и 9 блока 5:


где ω - угловая скорость вращения на входе или выходе блока 5, указанном в соответствующем индексе, а k - передаточное отношение от входа до выхода, указанных в соответствующем индексе, при остановленном вращении на другом входе блока 5. Для приведенного выше примера (знак k9÷7 противоположен знакам остальных передаточных отношений k), выражение (2) при одинаковых направлениях вращения (и, следовательно, знаках скоростей ω8 и ω9) представляет собой арифметическую разность приведенных скоростей, а выражение (1) их арифметическую сумму.
Система управления двигателями 21 и 22 (не показана на фиг. 2) регулирует их скорости в соответствии с технологическими задачами исполнительного механизма и распределяет суммарную мощность двигателей 21 и 22 между выходами 6 и 7 блока 5, изменяя отношение скоростей вращения ω8/ω9 на входах блока 5.
Для переключения приводного механизма на силовую передачу (с увеличенным передаточным отношением) система управления устанавливает соотношение скоростей вращения:

Учитывая, что k9÷7 отрицательно, скорости ω8 и ω9 при этом имеют один знак (т.е. направления вращения на входах 8 и 9 одинаковы). В соответствии с (2) скорость ω7 становится равной нулю, а скорость ω6 соответствует выражению (1) и равна арифметической сумме приведенных к выходу 7 входных скоростей вращения.
Для исключения вращения остановленного входа 4 дифференциала 1 под действием реактивного момента от нагрузки на выходе 2 система управления может наложить тормоз 10, блокируя выход 7 блока 5 и (через звено 24) вход 4 дифференциала 1.
Мощность обоих двигателей 21 и 22 поступает на выход 2 дифференциала 1 через его вход 3 и соединение 23. Как отмечено выше, передаточное отношение от выхода 6 блока 5 через соединение 23 до выхода 2 дифференциала 1 больше, чем аналогичное передаточное отношение от выхода 7 блока 5. Поэтому в этом режиме приводной механизм работает на низкоскоростной (силовой) передаче с увеличенным моментом вращения, используя при этом мощность обоих двигателей 21 и 22.
Обратное переключение на скоростную передачу выполняется снятием наложенного тормоза 10 и последующим изменением отношения ω8/ω9.
После снятия тормоза 10 можно, изменив направление вращения одного из двигателей 21 или 22, установить соотношение их скоростей вращения равным
Тогда скорость вращения ω6 на выходе 6 блока 5 будет согласно (1) равна нулю, а скорость вращения ω7 на выходе 7 блока 5 согласно (2) будет суммой приведенных скоростей вращения обоих двигателей 21 и 22. При этом мощность обоих двигателей поступает на выход 2 дифференциала 1 через его вход 4 и соединение 24. В этом режиме приводной механизм использует мощность обоих двигателей, работая на высокоскоростной передаче с пониженным моментом вращения.
При последующем изменении скоростей вращения двигателей 21 и 22, но сохранении отношения между их скоростями вращения, будет изменяться скорость на выходе 6, без изменения скорости на выходе 7 блока 5. Так как передаточное отношение от выхода 6 блока 5 к выходу 2 дифференциала 1 больше, чем передаточное отношение от выхода 7 блока 5 к выходу 2 дифференциала 1, угловая скорость на выходе 2 дифференциала 1 при остановленном выходе 6 блока 5 будет выше, чем при остановленном выходе 7 блока 5 (и наложенном тормозе 10).
При одновременном вращении выходов 6 и 7 на выход 2 будет приходить сумма их угловых скоростей, приведенных через соответствующие кинематические соединения.
При наложенном тормозе 10 устройство будет работать на первой, т.е. силовой передаче. При снятом тормозе 10 устройство будет работать на второй, т.е. скоростной передаче.
Тормоз 25, блокирующий вход 3 дифференциала 1, может использоваться в качестве стояночного (совместно с тормозом 10).
Как следует из изложенного, приводной механизм, охарактеризованный заявляемый патентной формулой, обеспечивает, как и прототип, переключение передаточного отношения без разрыва кинематической схемы, однако при этом сохраняет в работе оба приводных двигателя, тем самым, повышая эффективность использования их установленной мощности.
Пример (частный случай) осуществления изобретения, представленный функциональной схемой фиг. 3 и кинематической схемой фиг. 4, иллюстрирует возможность выполнения простой и компактной конструкции заявляемого механизма.
На функциональной схеме фиг. 3, некоторые из ранее приведенных на фиг. 2 кинематических соединений (15, 23), конструктивно представляющие собой общий вал, обозначены сплошными линиями, а другие (20, 26) - двойными пунктирными линиями и представляют собой соединения с отрицательными передаточными отношениями. Показанное на фиг. 3 соединение 26 (которого нет на фиг. 2) совместно с соединением 20 передает вращение от входа 9 блока 5 на вход 17 дифференциала 11, т.е. соединения 20 и 26 совместно выполняют функцию соединения 19, показанного на обобщенной функциональной схеме фиг. 2.
Представленный на фиг. 3 блок 5 обеспечивает (как и блок 5 на фиг. 2) три положительных передаточных отношения (k8÷6, k9÷7, k9÷6) и одно k9÷7 отрицательное и вследствие этого работает аналогично вышеописанному.
На кинематической схеме фиг. 4, реализующей функциональную схему фиг. 3, показан первый дифференциал 1, в состав которого входят солнечная шестерня 31 с наружными зубьями, сателлиты 32, смонтированные на водиле 33, центральная шестерня 34 с внутренними зубьями (эпицикл), вращающийся корпус 35 и зубчатое колесо 36 на корпусе 35. Вал водила 33 служит выходом 2 дифференциала 1, предназначенным для соединения с исполнительным механизмом. Вал солнечной шестерни 31 служит первым входом 3 дифференциала 1. Колесо 36 на корпусе 35 служит вторым входом 4 дифференциала 1.
Кинематическое соединение 24, соединяющее второй вход 4 дифференциала 1 с выходом 7 раздаточного блока 5, включает зубчатые колеса 36, 37 и связывающую их шестерню 38, на валу которой установлен тормоз 10.
Дифференциал 11 в составе блока 5 состоит из солнечной шестерни 39 с наружными зубьями, сателлитов 40, смонтированных на водиле 41, центральной шестерни 42 с внутренними зубьями (эпицикла), вращающегося корпуса 43 и закрепленного на нем зубчатого колеса 44. Вал водила 41 служит выходом дифференциала 11 и одновременно выходом 6 раздаточного блока 5. Вал солнечной шестерни 39 служит первым входом 13 дифференциала 11, а корпус 43 его вторым входом 17.
Дифференциал 12 в составе блока 5 состоит из солнечной шестерни 45 с наружными зубьями, сателлитов 46, смонтированных на водиле 47, эпицикла 48, корпуса 49 и зубчатого колеса 50 на корпусе 49. Вал водила 47 служит выходом дифференциала 12 и одновременно выходом 7 раздаточного блока 5. Вал солнечной шестерни 45 служит первым входом 14 дифференциала 12, а корпус 49 его вторым входом 18.
Общий вал солнечной шестерни 31 и водила 41 служит кинематическим соединением 23 с k=1 между первым входом 3 дифференциала 1 и выходом 6 раздаточного блока 5.
Зубчатые колеса 44 и 50, находящиеся в зацеплении, составляют кинематическое звено 26 (фиг. 3) с отрицательным передаточным отношением.
Общий вал шестерни 39 и двигателя 21, служит кинематической соединением 15 с k=1 (фиг. 3) между входом 8 блока 5 и входом 13 дифференциала 11. На этом валу установлена шестерня 51, находящаяся в зацеплении с зубчатым колесом 52 вал которого установлен в неподвижных опорах вращения. В зацеплении с колесом 52 находится шестерня 53, установленная на валу солнечной шестерни 45, который служит входом 14 дифференциала 12. При этом шестерни 51, 53 и зубчатое колесо 52 составляют кинематическое соединение 16, обеспечивающее положительное передаточное отношение между входом 8 блока 5 и входом 14 дифференциала 12.
На валу двигателя 22 установлена шестерня 54, находящаяся в зацеплении с зубчатым колесом 50, закрепленным на корпусе 49. Шестерня 54 и зубчатое колесо 50 составляют кинематическое соединение 20 с отрицательным передаточным отношением между входом 9 блока 5 и входом 18 дифференциала 12 (фиг. 3).
Зубчатые колеса 44 и 50 установлены с зацеплением, образующим соединение 26 (фиг. 3), которое вместе с соединением 20 выполняют функцию соединения 19 (фиг. 2), связывая вход 17 дифференциала 11с входом 9 блока 5.
На схеме фиг. 4 также показаны зубчатое колесо 55 и шестерня 56, которые используются в данном случае для конструктивного сопряжения тормоза 25 с входом 3 дифференциала 1.
Рассмотрение кинематической схемы, представленной на фиг. 4, совместно с функциональной схемой фиг. 3 показывает следующее.
Для каждого дифференциала 1, 11 и 12 внутреннее передаточное отношение как от первого входа дифференциала (вала его солнечной шестерни), так и от второго входа дифференциала (корпуса с наружным зубчатым колесом) до выхода дифференциала (вала его водила) при остановленном другом входе дифференциала является положительным (т.е. неинвертирующим направление вращения).
Вследствие этого в данной кинематической схеме знаки передаточных отношений от входов к выходам блока 5 определяются знаками sign k1 внешних по отношению к дифференциалам 11 и 12 кинематических соединений 15, 16, 26 и 20 в блоке 5, где i-позиционное обозначение соединения.
С учетом ранее изложенного:
sign k15=+1, sign k16=+1, sign k26=-1, sign k20=-1.
При этом знак соединения 19, показанного на обобщенной функциональной схеме фиг. 2, равен:
sign k19=sign k26×sign k20=(-1)×(-1)=+1.
Таким образом, в устройстве, представленном с функциональной схемой фиг. 3 и кинематической схемой фиг. 4, из четырех передаточных отношений km÷n, используемых в выражениях (1) и (2) только k9÷7 имеет отрицательный знак. Кроме того, анализ кинематической схемы фиг. 4, отражающей в масштабе реальные соотношения между ее элементами, позволяет убедиться, что передаточное отношение от выхода 7 через соединение 24 до выхода 2 меньше, чем аналогичное отношение от выхода 6 через соединение 23. Это обуславливает установку тормоза 10 со стороны входа 4 дифференциала 1 (как и на схеме фиг. 2).
Поскольку все это совпадает с допущениями, которые были приняты при описании устройства по схеме фиг. 2, работа устройства по схеме фиг. 4 аналогична вышеописанной.
При выполнении соотношения (3) или (4) скорость вращения (а следовательно и мощность) на одном из выходов 6 или 7 блока 5 будет равна нулю, а на другом выходе мощности (а также приведенные моменты и скорости) работающих двигателей 21 и 22 будут суммироваться.
В обоих случаях суммарная мощность двигателей 21 и 22 поступает через дифференциал 1 на выход 2 устройства:
- при остановленном выходе 7 - на силовой (низкоскоростной) передаче с блокировкой реактивного момента нагрузки, поступающего на вход 4, тормозом 10, наложенном на шестерню 38;
- при остановленном выходе 6 - на скоростной (низкомоментной) передаче (без необходимости наложения тормоза 25 для блокировки реактивного момента нагрузки).
В первом из указанных случаев дифференциалы 1 и 12 работают в режимах планетарных редукторов: дифференциал 1 - в режиме планетарного редуктора с неподвижным эпициклом 34 (и неподвижном корпусе 35), а дифференциал 12 - в режиме планетарного редуктора с неподвижным водилом 47.
На выбранной ступени передачи (т.е. в каждом из двух указанных случаев) при изменении скоростей вращения двигателей 21 и 22, но сохранении соответствующего отношения (3) или (4), регулируется скорость вращения и крутящий момент на нагрузке.