Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОЭЛЕКТРОННЫХ ПОМЕХ СИГНАЛАМ СПУТНИКОВОЙ НАВИГАЦИИ
Вид РИД
Изобретение
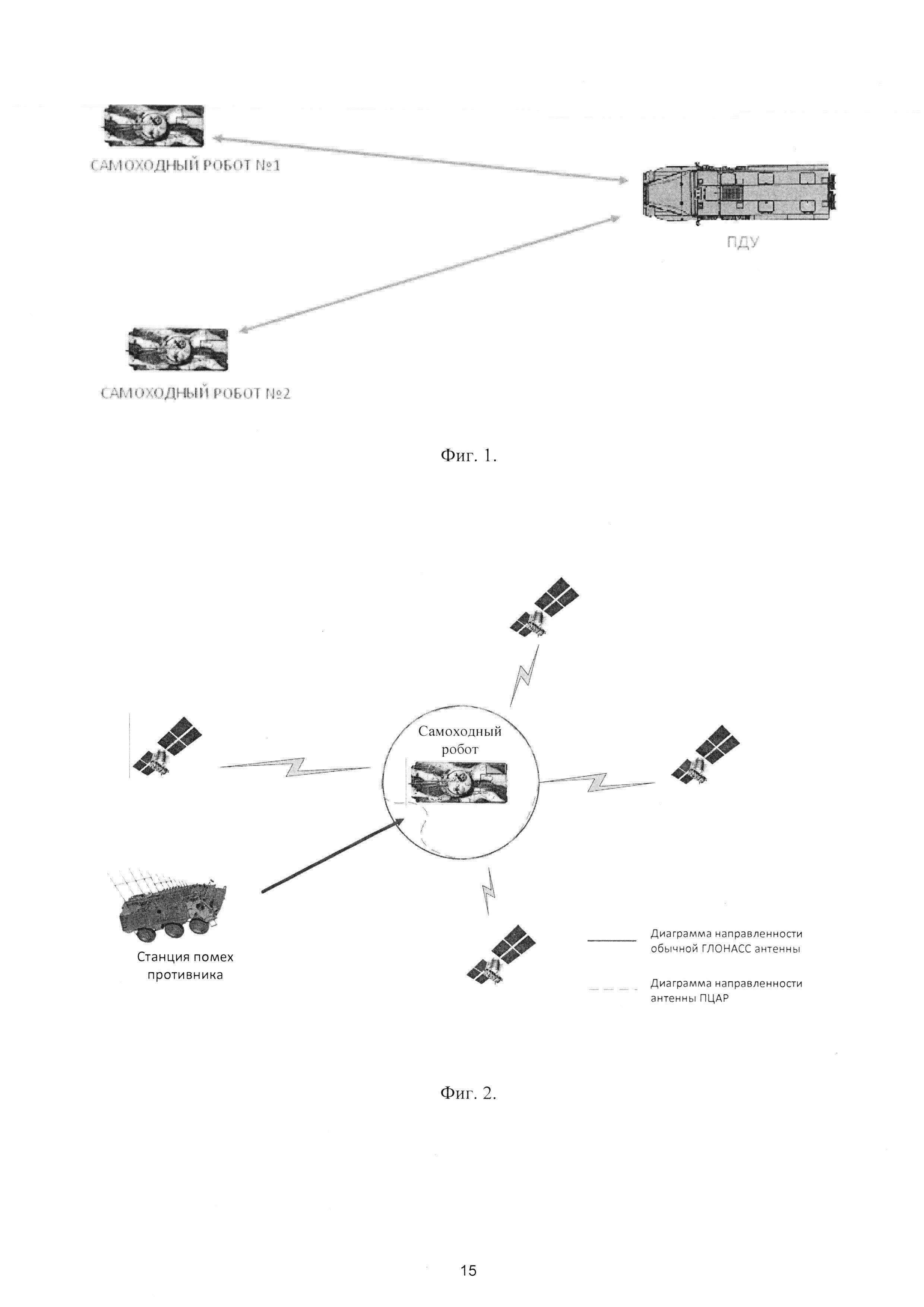
Изобретение относится к области определения местоположения с использованием радиоволн путем сопоставления в одной системе координат двух и более найденных направлений, а именно, к системам и способам определения местоположения источника радиоэлектронных помех сигналам спутниковой навигации, то есть определения на пункте дистанционного управления (ПДУ) местоположения источника радиоэлектронных помех с последующей передачей его координат по назначению. Изобретение может применяться в условиях радиоэлектронного конфликта для дистанционно управляемых робототехнических комплексов (РТК) военного и специального назначения, а именно РТК в которых, по меньшей мере, двумя самоходными роботами (CP) управляют по радиоканалу с пункта дистанционного управления (ПДУ). Типовая схема работы такого РТК показана на фиг. 1.
Одной из основных тенденцией современного развития наземной военной робототехники является постепенный переход от дистанционно-управляемых к полуавтономным (в перспективе к автономным) РТК. Это позволит устранить основные недостатки дистанционно-управляемых РТК, такие как [Рубцов И.В. Вопросы состояния и перспективы развития отечественной наземной робототехники военного и специального назначения // Известия ЮФУ. Технические науки. Рубрика Раздел I. Робототехника - 2013. - №3. - С. 14-21]:
- ограниченность радиуса действия при управлении по радиоканалу;
- необходимость непрерывного участия операторов в процессе управления как комплексом в целом, так и его подсистемами;
- возможность нарушения устойчивой работы каналов передачи информации и команд управления путем применения противником средств радиоэлектронного противодействия.
Необходимо отметить, что разработка, а в дальнейшем и применение роботизированных средств с высокой степенью автономности невозможно без системы навигации и позиционирования, обеспечивающей точное определение текущих координат и ориентации каждого самоходного робота из состава РТК.
Для определения собственных координат в самоходных роботах используют спутниковую систему позиционирования (ГЛОНАСС и/или GPS), либо комплексированные системы позиционирования (на основе спутниковой и инерциальных систем навигации).
Тенденции применения средств радиоэлектронной борьбы (РЭБ) в современных конфликтах говорят о том, что противник будет применять комплексы РЭБ, направленные на подавление как каналов связи и управления, так и сигналов спутниковой навигации. В этой связи повышение помехоустойчивости радионавигационной аппаратуры является актуальной задачей, так как в реальных условиях конфликта координатно-временное и навигационное поле будет подвергнуто радиоэлектронному подавлению, и только применение помехоустойчивой навигационной аппаратуры позволит РТК решать задачи в сложных условиях радиоэлектронной борьбы.
В основу современных методов повышения помехоустойчивости радионавигационной аппаратуры заложен принцип управления антенной системой (антенной решеткой) навигационного приемника, обеспечивающий нулевой прием сигналов в направлении источников помех. Такие способ и система определения направления на источник радиоэлектронных помех описаны в патенте US 20140035783 А1, в которых при помощи пространственно-временной обработки сигналов, поступающих от антенной системы (антенной решетки) радионавигационной аппаратуры, определяют направление на источник помех для последующего исключения аналоговым или цифровым способом этого направления при приеме сигналов геопозиционирования. При этом значительно снижается влияние помеховой обстановки на прием полезного сигнала со спутников. Такие антенные решетки назовем помехоустойчивыми цифровыми антенными решетками (ПЦАР). Иллюстрация работы данных системы и способа приведена на фиг. 2.
Недостатком способа и системы аналогов является отсутствие возможности определения местоположения (координат) источника радиоэлектронных помех, а только возможность определения направления на источник радиоэлектронных помех.
Наиболее близким к заявленному изобретению является способ определения координат летательных аппаратов на основе использования двух дирекционных углов и одного угла места, описанный в патенте RU 2601494. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком способа-прототипа является необходимость определения угла места (аргумента, значение которого всегда пренебрежимо мало в задачах определения местоположения наземных объектов), что увеличивает сложность выполнения способа-прототипа.
Техническим результатом заявленного изобретения является создание системы и способа определения местоположения (координат) источника радиоэлектронных помех с меньшей сложностью функционирования за счет использования только собственных координат самоходных роботов, а также их азимутов на источник радиоэлектронных помех.
Как следует из принципа работы помехоустойчивых цифровых антенных решеток, помимо задачи обеспечения помехоустойчивости, помехоустойчивые цифровые антенные решетки на самоходных роботах позволяют определять направление на источник помех (Фиг. 2). Использование помехоустойчивых цифровых антенных решеток на двух и более самоходных роботах из состава робототехнических комплексов (РТК) позволит решать задачу пеленга источника радиоэлектронных помех, т.е. определения на пункте дистанционного управления (ПДУ) местоположения источника радиоэлектронных помех с последующей передачей этих координат по назначению. Преимуществом заявленных системы и способа является простота реализации вычислений координат. Данное преимущество является следствием того обстоятельства, что для определения координат источника помех используют только собственные координаты самоходных роботов, а также полученные от них азимуты на источник помех, в то время как в прототипе (патент RU 2601494 «Способ определения координат летательных аппаратов на основе использования двух дирекционных углов и одного угла места») используют также углы места, что увеличивает сложность вычислений.
Поставленный технический результат достигнут путем создания системы определения местоположения источника радиоэлектронных помех сигналам спутниковой навигации, содержащей, по меньшей мере, два самоходных робота, каждый из которых имеет навигационную систему и помехоустойчивую цифровую антенную решетку, а также пункт дистанционного управления, имеющий бортовой вычислитель, который соединен по радиоканалу с навигационными системами и помехоустойчивыми цифровыми антенными решетками самоходных роботов, причем
навигационная система первого самоходного робота выполнена с возможностью определения и передачи в бортовой вычислитель географических координат  точки Q1 местоположения первого самоходного робота;
точки Q1 местоположения первого самоходного робота;
навигационная система второго самоходного робота выполнена с возможностью определения и передачи в бортовой вычислитель географических координат  точки Q2 местоположения второго самоходного робота;
точки Q2 местоположения второго самоходного робота;
помехоустойчивая цифровая антенная решетка первого самоходного робота выполнена с возможностью определения и передачи в бортовой вычислитель азимута α13 с точки Q1 местоположения первого самоходного робота на точку Q3 местоположения источника радиоэлектронных помех относительно точки Р северного полюса;
помехоустойчивая цифровая антенная решетка второго самоходного робота выполнена с возможностью определения и передачи в бортовой вычислитель азимута α23 с точки Q2 местоположения второго самоходного робота на точку Q3 местоположения источника радиоэлектронных помех относительно точки Р северного полюса;
бортовой вычислитель выполнен с возможностью вычисления и передачи на внешнее устройство географических координат  точки Q3 местоположения источника радиоэлектронных помех, при этом выполнения следующих операций:
точки Q3 местоположения источника радиоэлектронных помех, при этом выполнения следующих операций:
вычисления расстояние (σ12) между точками Q1 и Q2 и угол α12 с вершиной в точке Q1 между направлением на точку Р северного полюса и направлением на точку Q2:

где:



вычисления углов α312 и α123:
α312=α12-α13,
α123=α23-α21, где:

вычисления расстояния σ13 между точками Q1 и Q3:

вычисления искомых координат  и
и 


В предпочтительном варианте осуществления системы навигационная система самоходного робота выполнена в виде комплексированной (спутниковой и инерциальной) навигационной системы.
В предпочтительном варианте осуществления системы бортовой вычислитель пункта дистанционного управления соединен с навигационными системами самоходных роботов и помехоустойчивыми цифровыми антенными решетками самоходных роботов беспроводным каналом связи.
В предпочтительном варианте осуществления системы бортовой вычислитель пункта дистанционного управления выполнен с возможностью передачи на внешнее устройство географических координат  точки Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации.
точки Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации.
Поставленный технический результат достигнут также путем создания способа определения местоположения источника радиоэлектронных помех, в котором
посредством навигационной системы первого самоходного робота определяют и передают в бортовой вычислитель географические координаты  точки Q1 местоположения первого самоходного робота;
точки Q1 местоположения первого самоходного робота;
посредством навигационной системы второго самоходного робота определяют и передают в бортовой вычислитель географические координаты  точки Q2 местоположения второго самоходного робота;
точки Q2 местоположения второго самоходного робота;
посредством помехоустойчивой цифровой антенной решетки первого самоходного робота определяют и передают в бортовой вычислитель ПДУ азимут α13 с точки Q1 местоположения первого самоходного робота на точку Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации относительно точки Р северного полюса;
посредством помехоустойчивой цифровой антенной решетки второго самоходного робота определяют и передают в бортовой вычислитель ПДУ азимут α23 с точки Q2 местоположения второго самоходного робота на точку Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации относительно точки Р северного полюса;
посредством бортового вычислителя пункта дистанционного управления вычисляют и передают на внешнее устройство географические координаты  точки Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации, при этом выполняют следующие операции:
точки Q3 местоположения источника радиоэлектронных помех сигналам спутниковой навигации, при этом выполняют следующие операции:
вычисляют расстояние (σ12) между точками Q1 и Q2 и угол α12 с вершиной в точке Q1 между направлением на точку Р северного полюса и направлением на точку Q2:

где:



вычисляют углы α312 и α123:
α312=α12_α13,
α123=α23-α21, где:

вычисляют расстояния σ13 между точками Q1 и Q3:

вычисляют искомые координаты  и
и 


В предпочтительном варианте осуществления способа навигационная система самоходного робота выполнена в виде комплексированной (спутниковой и инерциальной) навигационной системы.
В предпочтительном варианте осуществления способа передают данные между бортовым вычислителем пункта дистанционного управления, навигационными системами самоходных роботов и помехоустойчивыми цифровыми антенными решетками самоходных роботов по беспроводному каналу связи.
В предпочтительном варианте осуществления способа посредством бортового вычислителя пункта дистанционного управления передают на внешнее устройство данные.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
Фиг. 1. Схема работы робототехнических комплексов в которых несколько самоходных роботов управляются по радиоканалу с пункта дистанционного управления, выполненная согласно уровню техники.
Фиг. 2. Схема работы помехоустойчивых цифровых антенных решеток и определения направления на источник помех.
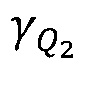
Фиг. 3. Схема работы системы и способа определения местоположения источника радиоэлектронных помех, выполненная согласно изобретению.
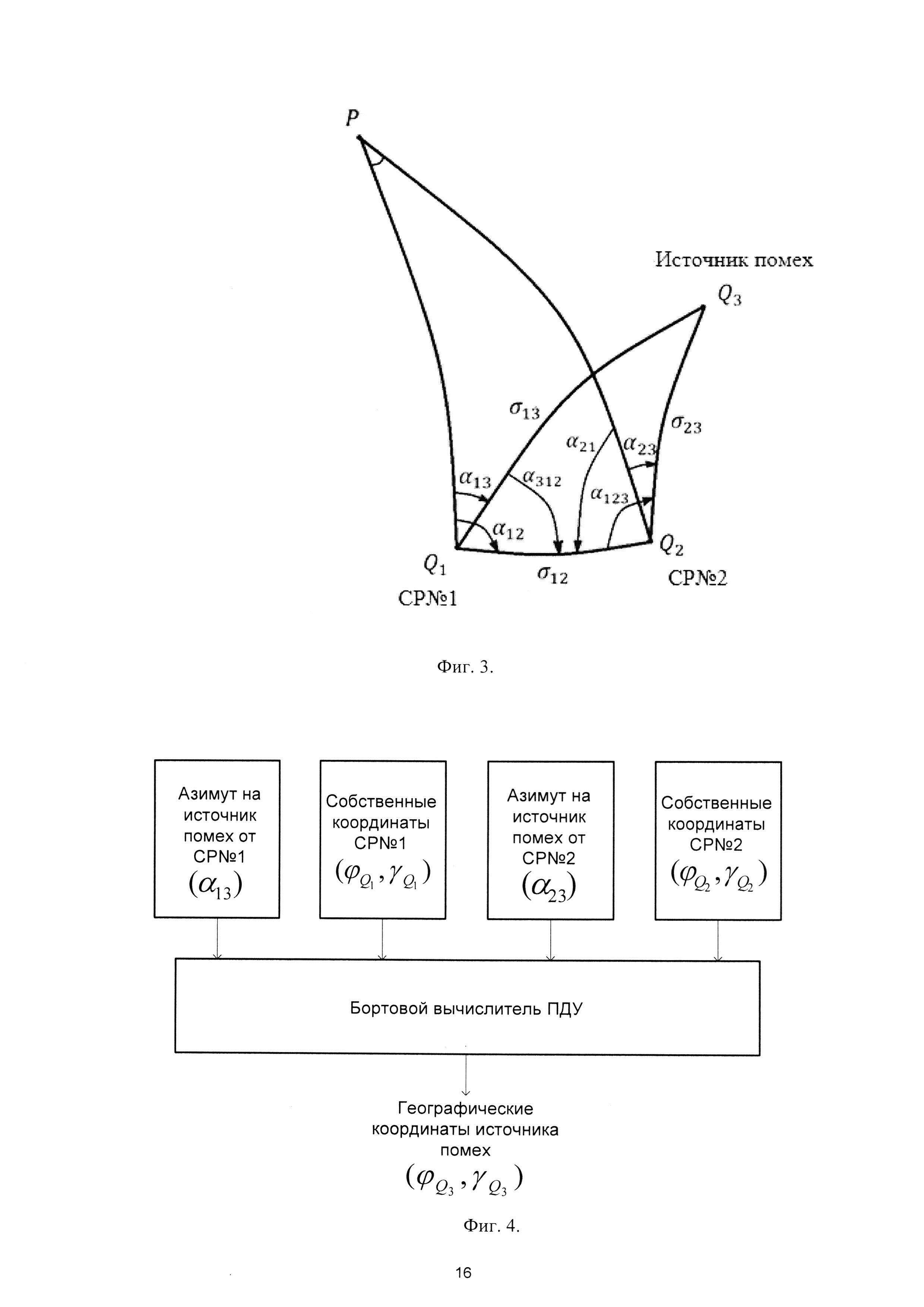
Фиг. 4. Схема входных и выходных данных бортового вычислителя пункта дистанционного управления при вычислении координат источника радиоэлектронных помех, выполненная согласно изобретению.
Принцип заявленного изобретения (фиг. 1, 3, 4) заключается в определении местоположения источника радиоэлектронных помех сигналам спутниковой навигации по данным о:
- собственных координатах двух самоходных роботов;
- положении помехоустойчивых цифровых антенных решеток (ПЦАР) самоходных роботов относительно направления CP на север;
- направлении на источник радиоэлектронных помех, полученном от каждой помехоустойчивой цифровой антенной решетки.
В соответствии с заявленным изобретением, самоходные роботы, оборудованные гирокомпасом и помехоустойчивой цифровой антенной решеткой, передают на пункт дистанционного управления для определения географичесиких координат источника радиоэлектронных помех сигналам спутниковой навигации данные:
- от гирокомпаса самоходного робота о собственном положении самоходного робота в пространстве;
- от помехоустойчивой цифровой антенной решетки самоходных роботов о направлении помехоустойчивой цифровой антенной решетки на источник радиоэлектронных помех относительно направления на север.
На основе этих данных на пункте дистанционного управления вычисляют географические координаты источника помех сигналам спутниковой навигации. Для реализации алгоритма используют метод прямой угловой засечки, известный в геодезических задачах местоопределения. Подробно метод описан в книге Морозов В.П. Курс сфероидической геодезии, Издание 2, переработанное и дополненное, Москва, Недра, 1979, 296 с.
Рассмотрим вариант выполнения заявленного изобретения (Фиг. 3, 4). В заявленном изобретении определяют координаты  источника радиоэлектронных помех, расположенной в точке Q3, по географическим координатам двух самоходных роботов, расположенных в точках Q1, Q2, а также азимутам (α13, α23) с этих точек на искомую точку Q3 относительно точки Р северного полюса. На фиг. 3 обозначены рассматриваемые точки, расстояния и углы.
источника радиоэлектронных помех, расположенной в точке Q3, по географическим координатам двух самоходных роботов, расположенных в точках Q1, Q2, а также азимутам (α13, α23) с этих точек на искомую точку Q3 относительно точки Р северного полюса. На фиг. 3 обозначены рассматриваемые точки, расстояния и углы.
Исходные данные:
 - географические координаты точки Q1 (местоположение самоходного робота №1);
- географические координаты точки Q1 (местоположение самоходного робота №1);
 - географические координаты точки Q2 (местоположение самоходного робота №2);
- географические координаты точки Q2 (местоположение самоходного робота №2);
α13 - азимут с точки Q1 на точку Q3;
α23 - азимут с точки Q2 на точку Q3;
Искомые величины:
- географические координаты точки Q3 (местоположение источника радиоэлектронных помех);
Выполняют следующие операции:
a) Вычисляют расстояние (σ12) между точками Q1 и Q2 и угол α12 с вершиной в точке Q1 между направлением на север и точку Q2:

где:



b) Вычисляют углы α312 и α123:
α312=α12-α13;
α123=α23-α21, где:

c) Вычисляют расстояние σ13 между точками Q1 и Q3:

d) Вычисляют искомые координаты  и
и  :
:


На фиг. 4 показаны входные и выходные данные бортового вычислителя пункта дистанционного управления при вычислении координат источника радиоэлектронных помех, в соответствии с заявленным изобретением.
Бортовой вычислитель пункта дистанционного управления способен вычислять местоположение источника радиоэлектронных помех противника, с последующей передачей их координат по назначению, в зависимости от варианта применения и взаимодействия.
Заявленное изобретение, может быть применено в робототехническом комплексе, состоящем, по меньшей мере, из двух самоходных роботов. При этом с увеличением количества самоходных роботов в РТК будет увеличиваться как точность определения местоположения источника радиоэлектронных помех сигналам спутниковой навигации, так и количество источников радиоэлектронных помех сигналам спутниковой навигации, местоположение которых можно определить.
Заявленное изобретение может быть осуществлено на современной элементной базе по типовым технологиям.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.





























Широкополосная система радиосвязи с частотным дуплексом
Цифровой ofdm демодулятор с децимацией частоты дискретизации
Система передачи данных в заданных интервалах времени
Устройство шифрования данных по стандарту гост р 34.12-2015 и алгоритмам "магма" и aes
Аппарат и система передачи данных с мобильного объекта
Устройство раунда шифрования данных по алгоритму "магма" и стандарту гост р 34.12-2015
Способ автоматического вхождения в связь и выбора оптимального режима работы абонентской и базовой станций передачи данных
Аппарат и способ радиосвязи на основе технологии simo-ofdm

