Результат интеллектуальной деятельности: СПОСОБ ПОСТРОЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО ОБЪЕКТА, ОТДЕЛЯЕМОГО ОТ ДРУГОГО КОСМИЧЕСКОГО ОБЪЕКТА
Вид РИД
Изобретение
Предлагаемый способ может быть использован в космической технике при управлении движением космического объекта (КО), например пилотируемого космического корабля (ПКК), после его отделения в заданном направлении от другого космического объекта (ДКО), например орбитальной пилотируемой станции (ОПС).
Известен способ управления движением КО после его отделения от другого КО, выбранный в качестве аналога, в котором для определения ориентации используется датчик инфракрасной вертикали (ИКВ) (Легостаев В.П., Микрин Е.А., Орловский И.В., Борисенко Ю.Н., Платонов В.Н., Евдокимов С.Н. Создание и развитие систем управления движением космических кораблей «Союз» и «Прогресс»: опыт эксплуатации, планируемая модернизация // Сборник статей. Москва, МФТИ, 2009.) (фиг. 2). В этом способе, после поступления первых измерений угловой скорости через время Δt к КО прикладывают серию импульсов, совершающих ряд последовательных разворотов для обеспечения нахождения диска Земли в поле зрения датчика ИКВ. Затем, уже по показаниям датчика ИКВ, к КО прикладывают серию импульсов, совмещающих видимый центр Земли с центром обзора датчика ИКВ. Далее, по изменению компонент угловой скорости в плоскости перпендикулярной направлению на центр Земли определяют текущее направление орбитальной угловой скорости и, соответственно, орбитальную систему координат (ОСК), описанную в труде Аппазов Р.Ф., Сытин О.Г. «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987., после чего прикладывают серию импульсов для разворота КО в требуемую ориентацию.
Основными недостатками этого способа управления движением являются требование обеспечения определенных светотеневых условий на орбите и продолжительное (7-10 минут) время, затрачиваемое на поиск Земли.
Известен способ управления движением КО в котором для построения ориентации сразу после отделения от ДКО используются априорные данные о положении ДКО в момент отделения и измерения угловой скорости после их включения (Борисенко Н.Ю., Сумароков А.В. Об ускоренном построении орбитальной ориентации грузовых и транспортных кораблей серий «Союз МС» и «Прогресс МС» // Известия РАН. Теория и системы управления. 2017. №5, С. 131-141), выбранный в качестве прототипа (фиг. 1). При этом в момент отделения датчики угловой скорости отключены. Далее, после их включения, на основе информации об угловой скорости, с помощью итеративного процесса, определяется угловая скорость в момент разделения по формуле:

где ω - угловая скорость КО, τ - шаг интегрирования, J - тензор инерции КО. После чего, используя априорную информацию об ориентации в момент разделения при помощи итеративного процесса определяется текущее угловое рассогласование по формулам:


Где Λ - кватернион ориентации КО. После определения угловых рассогласований между текущим и требуемым угловым положением к КО прикладывается серия импульсов для осуществления разворота в требуемую угловую ориентацию.
Основным недостатком этого способа является то, что на включение датчиков угловой скорости и определение ориентации требуется время, в течение которого КО находится в процессе свободного вращения. В процессе свободного вращения может произойти столкновение с ДКО, по этой причине данный способ не может быть использован при разделении со многими ДКО.
Техническим результатом изобретения является сокращение продолжительности построения ориентации после отделения от ДКО, независимо от светотеневых условий на орбите.
Технический результат достигается тем, что в способе построения ориентации космического объекта, отделяемого от другого космического объекта, содержащий определение величин импульсов для его последующего разворота и последующего поддержания ориентации по разнице между текущей и требуемой ориентацией космического объекта, и приложения рассчитанных импульсов поддержания ориентации к космическому объекту, отличающегося тем, что определение импульсов для разворота и поддержания начальной ориентации производят перед расстыковкой, и приложение импульсов производят к объекту, от которого произойдет отстыковка, определение импульсов поддержания ориентации космического объекта, отделенного от другого космического объекта, производят после расстыковки, и приложение импульсов к космическому объекту, отделенному от другого космического объекта, производят после расстыковки.
Технический результат достигается тем, что в отличие от прототипа, требуемое положение КО в пространстве после расстыковки обеспечивается определением угла разворота связки КО и ДКО из текущей ориентации в требуемую для ориентации КО, и приложением импульсов к ДКО для осуществления разворота связки в требуемую ориентацию.
Информация о том, что ДКО выполнил задачу разворота в нужную для КО ориентацию, передается одним из следующих путей:
- заданием в КО определенного момента времени, когда разворот связки КО и ДКО будет непременно завершен;
- специализированным сообщением по межбортовому обмену КО и ДКО;
- по команде из Центра Управления Полетом;
- в момент отстыковки КО от ДКО.
Во всех этих случаях, в отличие от прототипа, датчики угловых скоростей КО включаются и готовы к использованию до расстыковки, с расчетом ориентации КО в пространстве, начиная с момента поступления в КО от ДКО данных о завершении разворота связки.
Результат достигается тем, что с момента TSINS включения датчика угловой скорости происходит непрерывное интегрирование кватерниона В по измерениям угловой скорости со при помощи кинематических уравнений с коррекцией нормы:
 ,
,
В0=(1 0 0 0).
В начальный момент времени TSINS значение кватерниона В принимается рыным B(TSINS)=B0. После получения информации от ДКО об ориентации связки КО и ДКО в момент времени tДКО относительно орбитального базиса в виде кватерниона Q в КО вычисляется кватернион N1, такой что:
 .
.
Таким образом кватернионом N1 фиксируется рассогласование связанного базиса от орбитального.
После отстыковки КО от ДКО, КО самостоятельно определяет необходимые угловые маневры КО в виде необходимого кватерниона разворота от требуемого положения к связанному базису N(t) с использованием следующего соотношения:
 ,
,
здесь R - требуемый кватернион разворота относительно орбитального базиса, ΔL(t-tДКО) - кватернион поворота самого орбитального базиса за время tДКО. После расчета N(t) КО прилагает необходимую серию импульсовт для осуществления разворота.
После приведения КО в заданное в пространстве положение, КО выдает серию импульсов для безопасного отхода от ДКО и выполнения целевых задач, например, для проведения космических экспериментов.
Фактическая ориентация ОПС определена с точностью 0.12° и данной ошибкой для управления ориентацией можно пренебречь.
Сущность изобретения поясняется фиг. 1-3, где
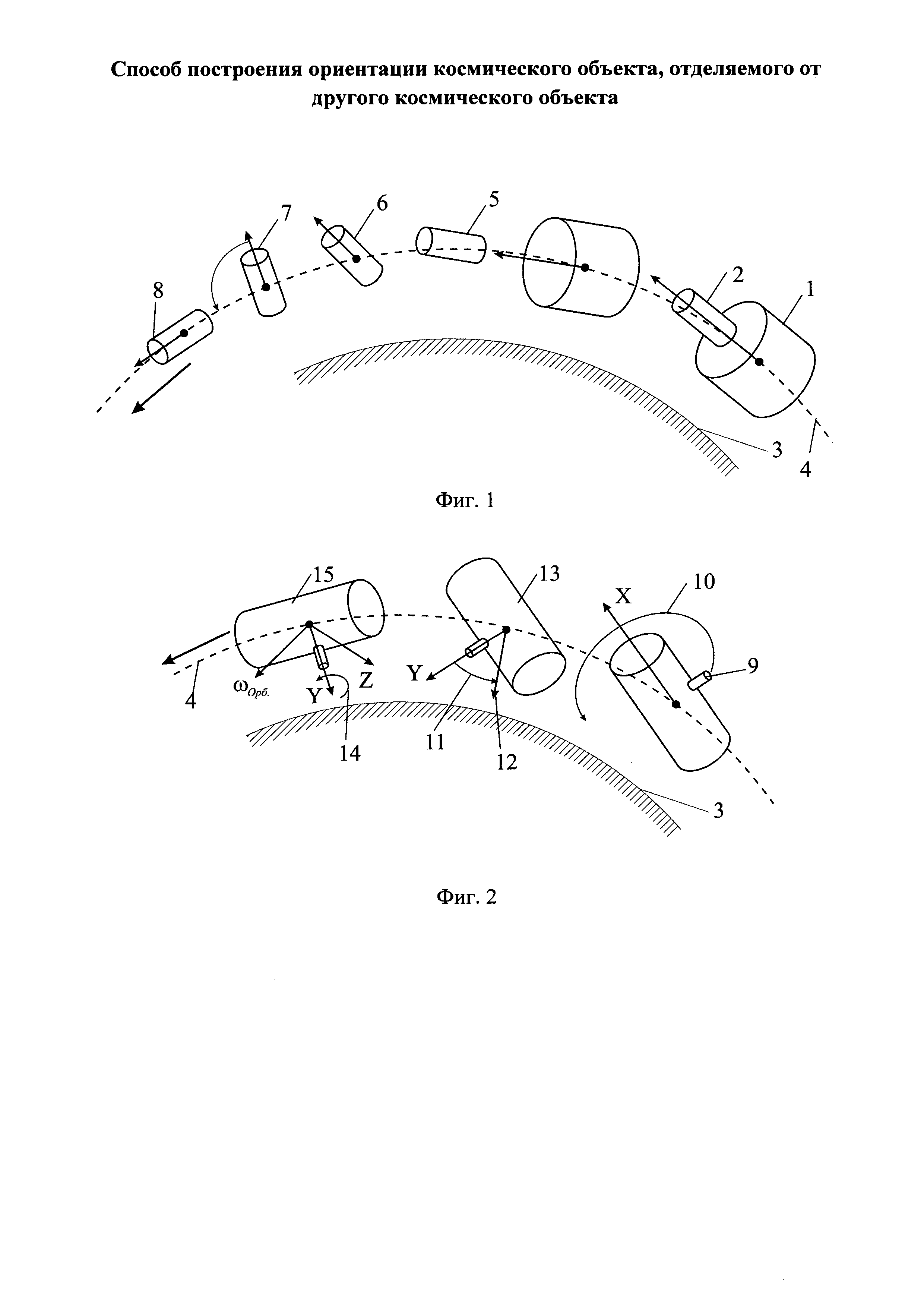
на фиг. 1 представлен способ управления движением по прогнозу ориентации при отделении от ракетоносителя,
на фиг. 2 представлен способ управления движением при помощи ИКВ,
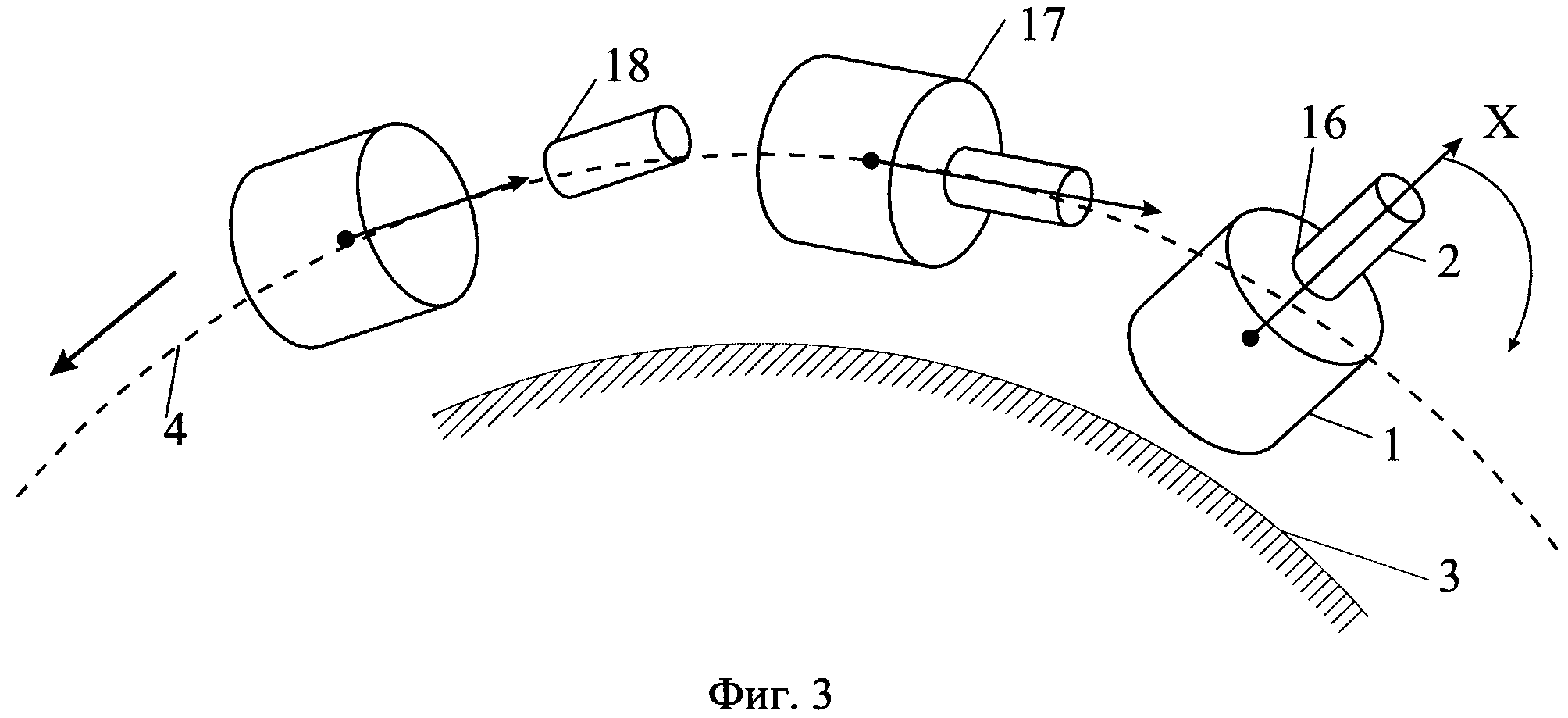
на фиг. 3 представлена циклограмма управления движением по предлагаемому способу.
На фигурах стрелкой обозначено направление орбитального движения КО и ДКО.
поз. 1 обозначен ДКО;
поз. 2 обозначен КО;
поз. 3 обозначена Земля;
поз. 4 обозначена орбита КО;
поз. 5 обозначено отделене КО от ракетоносителя;
поз. 6 обозначено свободное вращение КО;
поз. 7 обозначен разворот КО в ориентацию по прогнозу;
поз. 8 обозначено окончание построения орбитальной ориентации КО;
поз. 9 обозначен датчик ИКВ;
поз. 10 обозначен процесс поиска Земли;
поз. 11 обозначены показания датчика ИКВ;
поз. 12 обозначено направление местной вертикали;
поз. 13 обозначен процесс построения местной вертикали;
поз. 14 обозначен разворот для построения местной вертикали;
поз. 15 обозначен процесс определения угла рысканья и разворот
вокруг местной вертикали в орбитальную систему координат;
поз. 16 обозначен процесс разворот связки КО и ДКО в необходимую
для разделения ориентацию;
поз. 17 обозначен процесс передачи данных о текущей ориентации ДКО передаются в КО;
поз.18 обозначен процесс разделения КО и ДКО.
Фиг. 1 представлена циклограмма управления движением при построении ориентации используя информацию о номинальных параметрах отделения и измерения угловой скорости. После отделения от ракеты-носителя (РН) в момент Т0 (поз. 5). КО находится в свободном, неуправляемом движении в течение времени Δt (поз. 6). За это время происходит подготовка двигательной установки, раскрытие элементов конструкции включение и тестирование бортового оборудования, необходимого для осуществления автономного полета. В момент времени T0+Δt завершается раскрутка гироскопов датчиков угловой скорости и их измерения начинают поступать в бортовой компьютер и на основе этих измерений строится прогноз положения орбитальной ориентации и осуществляется разворот (поз. 7). После окончания разворота КО оказывается в орбитальной ориентации (поз. 8).
Фиг. 2 демонстрирует управление движением в процессе построения ОСК при помощи датчика ИКВ (поз. 9). Вначале КО совершает ряд разворотов для обеспечения нахождения диска Земли в поле зрения датчика ИКВ (поз. 10). Затем, по показаниям датчика ИКВ (поз. 11) строится местная вертикаль (поз. 12), за счет приведения с помощью двигателей КО видимого центра Земли в центр обзора датчика ИКВ (поз. 13). По изменению компонент угловой скорости в плоскости перпендикулярной направлению на центр Земли определяется текущее направление орбитальной угловой скорости, после чего осуществляется разворот КО вокруг местной вертикали (поз. 14) в ОСК (поз. 15).
На фиг. 3 представлена циклограмма управления движением по предлагаемому способу. До отделения от ОПС проводится разворот связки КО и ДКО в необходимую для разделения ориентацию (поз. 16). После завершения разворота данные о текущей ориентации ДКО передаются в КО (поз. 17), за это время происходит подготовка двигательной установки, включение и тестирование бортового оборудования, необходимого для осуществления автономного полета, включающего измерители угловых скоростей. После чего осуществляется разделение КО и ДКО (поз. 18).
Способ построения ориентации космического объекта, отделяемого от другого космического объекта, содержащий определение величин импульсов для его последующего разворота и последующего поддержания ориентации по разнице между текущей и требуемой ориентацией космического объекта и приложение рассчитанных импульсов поддержания ориентации к космическому объекту, отличающийся тем, что определение импульсов для разворота и поддержания начальной ориентации производят перед расстыковкой и приложение импульсов производят к объекту, от которого произойдет отстыковка, определение импульсов поддержания ориентации космического объекта, отделенного от другого космического объекта, производят после расстыковки и приложение импульсов к космическому объекту, отделенному от другого космического объекта, производят после расстыковки.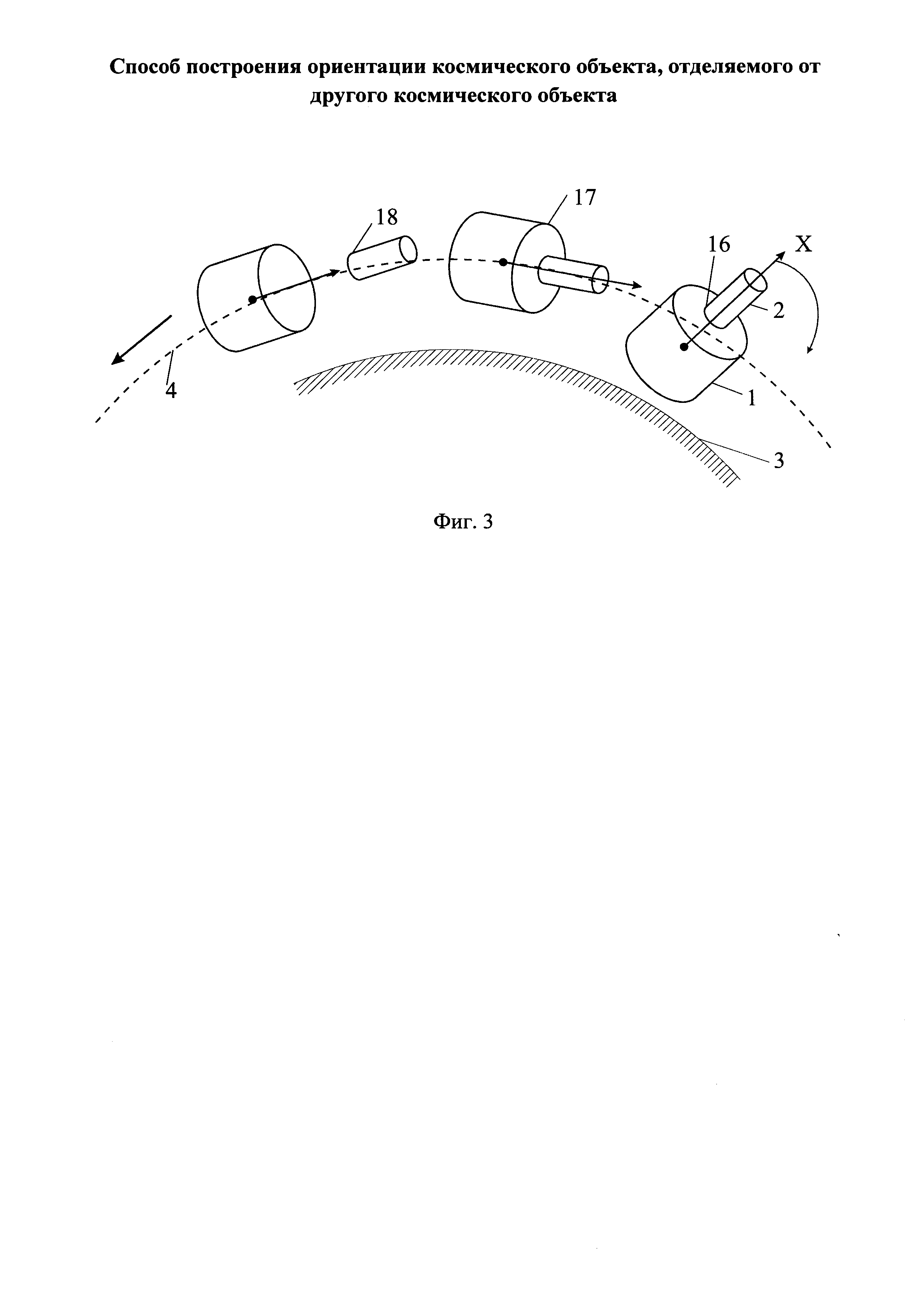
Щелевая антенна
Способ испытаний изделий на суммарную негерметичность
Способ определения временной привязки производимых с космического аппарата снимков земной поверхности
Способ оценки состояния солнечной батареи космического аппарата с инерционными исполнительными органами
Способ контроля производительности солнечной батареи космического аппарата на бестеневых орбитах
Герметизированное устройство
Устройство осевой фиксации коаксиальных деталей и способы осевой фиксации и расфиксации коаксиальных деталей
Герметизированное устройство
Способ зондирования верхней атмосферы
Коаксиальный электрохимический компрессор водорода
Способ управления движением космического объекта при сближении с другим космическим объектом

