Результат интеллектуальной деятельности: Способ калибровки радиолокационной станции с активной фазированной антенной решёткой
Вид РИД
Изобретение
Способ калибровки радиолокационной станции с активной фазированной антенной решеткой.
Изобретение относится к области радиолокации и может быть использовано для калибровки радиолокационных станций (РЛС) с активной фазированной антенной решеткой (АФАР) с электронным сканированием в двух плоскостях по величине эффективной поверхности рассеяния (ЭПР).
Известен способ калибровки радиолокационной станции, который заключается в следующем: запускают искусственный спутник Земли (ИСЗ) сферической формы, облучают его сигналами калибруемой РЛС, принимают и измеряют амплитуды отраженных от ИСЗ сигналов, которые используют как соответствующие эталонному значению ЭПР отражателя [1] стр. 204-213.
Недостатком данного способа является невозможность его использования для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, так как для таких радиолокаторов отражатель сферической формы невидим [3] стр. 103. Другим недостатком способа с использованием сферического отражателя как эталона ЭПР для РЛС, работающих на волнах горизонтальной, вертикальной, а также круговой поляризации при ортогональном приеме отраженных сигналов является малая ЭПР сферы [3] стр. 235. Кроме того, изготовить сферу больших размеров с высокой точностью чрезвычайно сложно, а вывести на орбиту почти невозможно [4] стр. 51.
Наиболее близким аналогом изобретения (прототипом) является способ, описанный в патенте RU №2535661 «Способ калибровки радиолокационной станции по миниспутнику с эталонным значением эффективной поверхности рассеяния» [5]. Недостатком прототипа является снижение точности калибровки радиолокационных станций из-за изменения ЭПР УО в направлении калибруемой РЛС вследствие тепловых деформаций конструкции УО, возникающих из-за циклического воздействия перепада температур в условиях космического полета.
Технический результат предлагаемого изобретения заключается в повышении точности калибровки РЛС с АФАР по величине ЭПР. Технический результат достигается за счет стабильного значения ЭПР КА с УО в секторе электронного сканирования луча АФАР, а также высокостабильного значения ЭПР уголкового отражателя за счет устойчивости конструкции УО к тепловым деформациям, возникающим из-за циклического воздействия перепада температур в условиях космического полета.
Указанный технический результат достигается тем, что в способе калибровки радиолокационной станции с использованием космического аппарата с эталонными отражательными характеристиками, согласно которому запускают отражатель с известной величиной эффективной поверхности рассеяния на орбиту вокруг Земли, облучают его сигналами калибруемой радиолокационной станции, принимают отраженные сигналы от отражателя, находящегося в дальней зоне антенны радиолокационной станции, измеряют амплитуды отраженных от отражателя сигналов и наклонную дальность до космического аппарата, проводят калибровку приемников РЛС с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников РЛС, и получают калибровочный график, новым является то, что на орбиту вокруг Земли транспортируют КА, корпус которого выполнен в форме куба или прямой призмы. На одной из граней куба или прямой призмы имеется V-образный паз или углубление V-образной формы 2, в котором V-образно жестко закрепляют уголковый отражатель 3 с гранями 4, 5 из двух плоских радиоотражающих пластин, развернутых под фиксированным углом α. Величина угла α находится в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - размер грани уголкового отражателя (см. фиг. 1, фиг. 2, фиг. 3).
Причем биссектриса угла 7 между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя из двух плоских радиоотражающих пластин, развернутых под фиксированным углом α, совпадает с продольной осью 8 корпуса КА. Предварительно, до запуска КА на орбиту вокруг Земли определяют координаты середины ребра 6 (фиг. 2) и положение биссектрисы угла уголкового отражателя с гранями из двух плоских радиоотражающих пластин в плоскости, перпендикулярной середине ребра, в связанной системе координат КА. Затем вводят их в память бортового цифрового вычислительного комплекса. После выведения КА на целевую орбиту для управления КА используют наземный комплекс управления с командной радиолинией и бортовую аппаратуру командной радиолинии КА. При этом на КА передают координаты радиолокационной станции, подлежащей калибровке по величине эффективной поверхности рассеяния. Кроме того, на КА передают предельные значения углов электронного сканирования луча АФАР в угломестной и азимутальной плоскостях, в сферической системе координат АФАР (пределы сектора сканирования по азимуту и углу места) [6]. Затем с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и бортового цифрового вычислительного комплекса определяют текущие координаты центра масс КА, углы текущей пространственной ориентации КА. С помощью бортового цифрового вычислительного комплекса определяют положение центра масс КА относительно переданных с наземного комплекса управления координат калибруемой радиолокационной станции. Далее, используя предельные значения углов электронного сканирования луча АФАР в угломестной и азимутальной плоскостях в сферической системе координат АФАР, задающих направление луча калибруемой РЛС, бортовым цифровым вычислительным комплексом осуществляют расчет времени входа КА в оба сектора электронного сканирования луча АФАР в угломестной и азимутальной плоскостях калибруемой РЛС. Одновременно бортовым цифровым вычислительным комплексом производят расчет и определяют ориентацию осей связанной системы координат КА относительно линии визирования калибруемой РЛС с АФАР, а также пространственное положение биссектрисы угла уголкового отражателя из двух плоских радиоотражающих пластин относительно линии визирования РЛС с АФАР на момент времени входа КА в оба сектора электронного сканирования луча и в угломестной, и азимутальной плоскостях калибруемой РЛС с АФАР. При входе КА в оба сектора электронного сканирования луча АФАР по расчетным данным бортового цифрового вычислительного комплекса системой ориентации КА осуществляют совмещение положения биссектрисы угла уголкового отражателя из двух плоских радиоотражающих пластин с линией визирования калибруемой РЛС с АФАР. Затем при помощи бортового цифрового вычислительного комплекса осуществляют расчет времени выхода КА из сектора электронного сканирования луча АФАР в угломестной и азимутальной плоскостях калибруемой РЛС. Далее системой ориентации КА удерживают совмещение биссектрисы угла уголкового отражателя из двух плоских радиоотражающих пластин с линией визирования калибруемой РЛС с АФАР до выхода КА из хотя бы одного сектора электронного сканирования луча АФАР или угломестной или азимутальной плоскости РЛС. Осуществляют калибровку радиолокационной станции с АФАР по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени меньше либо равным ДТ, определяемым из соотношения:
ΔT=t2-t1,
где t1 - время входа КА в оба сектора электронного сканирования луча АФАР и в угломестной, и в азимутальной плоскостях;
t2 - время выхода КА хотя бы из одного сектора электронного сканирования луча АФАР или угломестной, или азимутальной плоскости.
При этом основной лепесток индикатрисы рассеяния уголкового отражателя из двух плоских радиоотражающих пластин в течение времени нахождения КА в секторах электронного сканирования луча АФАР в угломестной и азимутальной плоскостях направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния уголкового отражателя из двух плоских радиоотражающих пластин совпадает с линией визирования калибруемой радиолокационной станции с АФАР. Кроме того, измеренные амплитуды отраженных сигналов от уголкового отражателя из двух плоских радиоотражающих пластин регистрируют, затем по калибровочному графику пересчитывают в значения относительной мощности сигналов, отраженных от уголкового отражателя.
Кроме того, значения относительной мощности сигналов, отраженных от уголкового отражателя из двух плоских радиоотражающих пластин, приводят к фиксированной дальности путем перерасчета по формуле:
 ,
,
где Bi - единичное измеренное значение относительной мощности отраженного сигнала от уголкового отражателя;
Ri - единичное измеренное калибруемой радиолокационной станцией с АФАР значение наклонной дальности до КА, соответствующее данному Bi;
 - величина фиксированной дальности.
- величина фиксированной дальности.
Кроме того, приведенные к фиксированной дальности единичные значения относительной мощности отраженных сигналов от уголкового отражателя из двух плоских радиоотражающих пластин усредняют по формуле:
 ,
,
где n - число результатов единичных измерений на интервале времени ΔТ.
Кроме того, усредненное значение Рср используют как значение относительной мощности отраженных сигналов, соответствующее эталонному значению эффективной поверхности рассеяния уголкового отражателя из двух плоских радиоотражающих пластин.
Существует вариант, в котором координаты центра масс КА и углы текущей пространственной ориентации КА определяют при помощи приемников навигационной системы типа GALILEO и/или «ГЛОНАСС».
Существует вариант, в котором координаты центра масс КА и углы текущей пространственной ориентации КА определяют при помощи приемников навигационной системы типа GALILEO и/или GPS.
Существует вариант, в котором для калибровки РЛС, антенная система которой состоит из несколько полотен решетки, проводят калибровку для каждого полотна решетки АФАР.
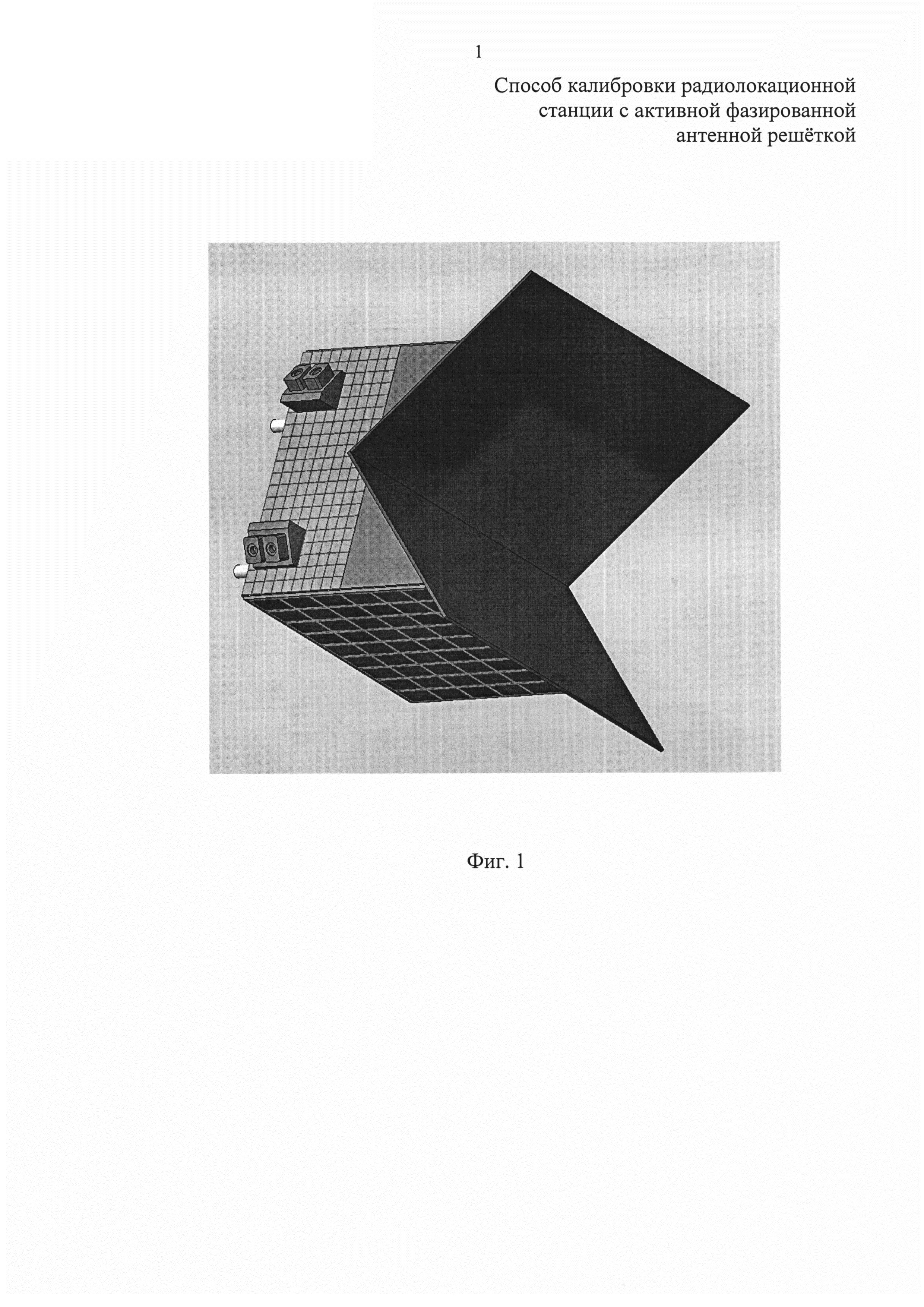
Предлагаемый способ поясняется чертежами фиг. 1 - фиг. 6.
Фиг. 1 - общий вид космического аппарата.
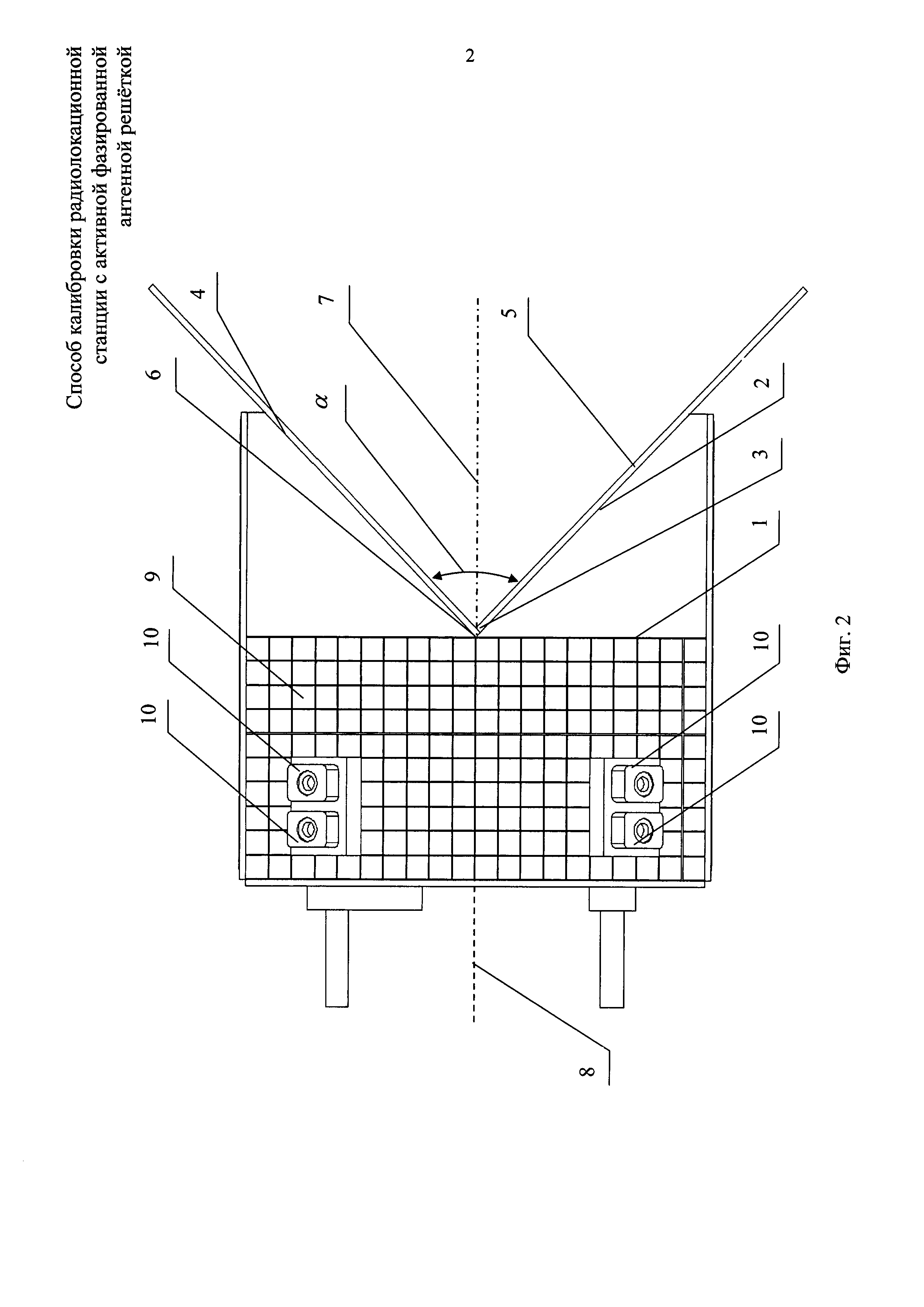
Фиг. 2 - космический аппарат 1 (вид сверху) в форме куба, где 7 - биссектриса угла α; 8 - продольная ось космического аппарата; 9 - солнечные батареи; 10 - двигатели системы ориентации и стабилизации.
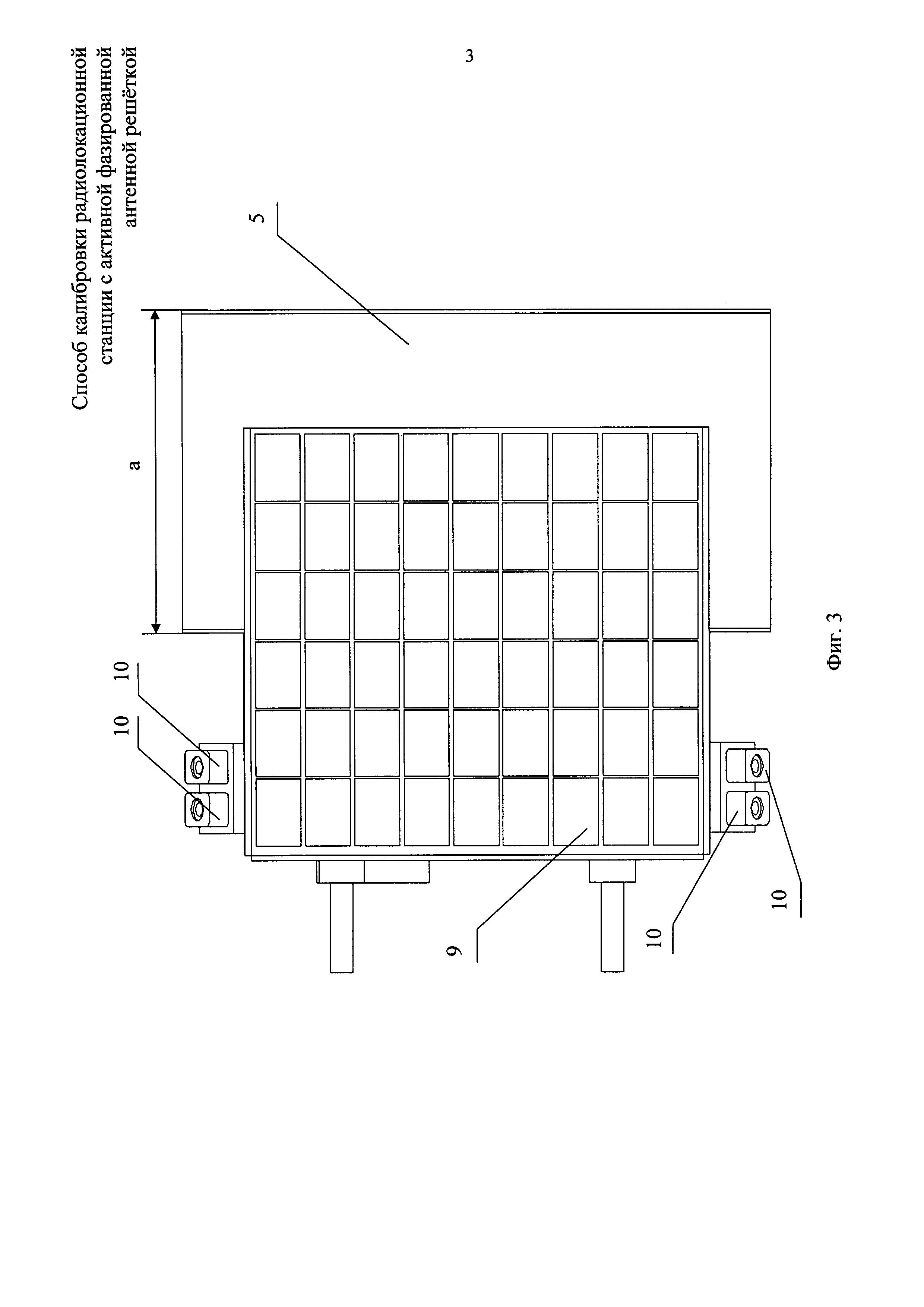
Фиг. 3 - космический аппарат (вид сбоку) в форме куба, где а - размер грани уголкового отражателя.
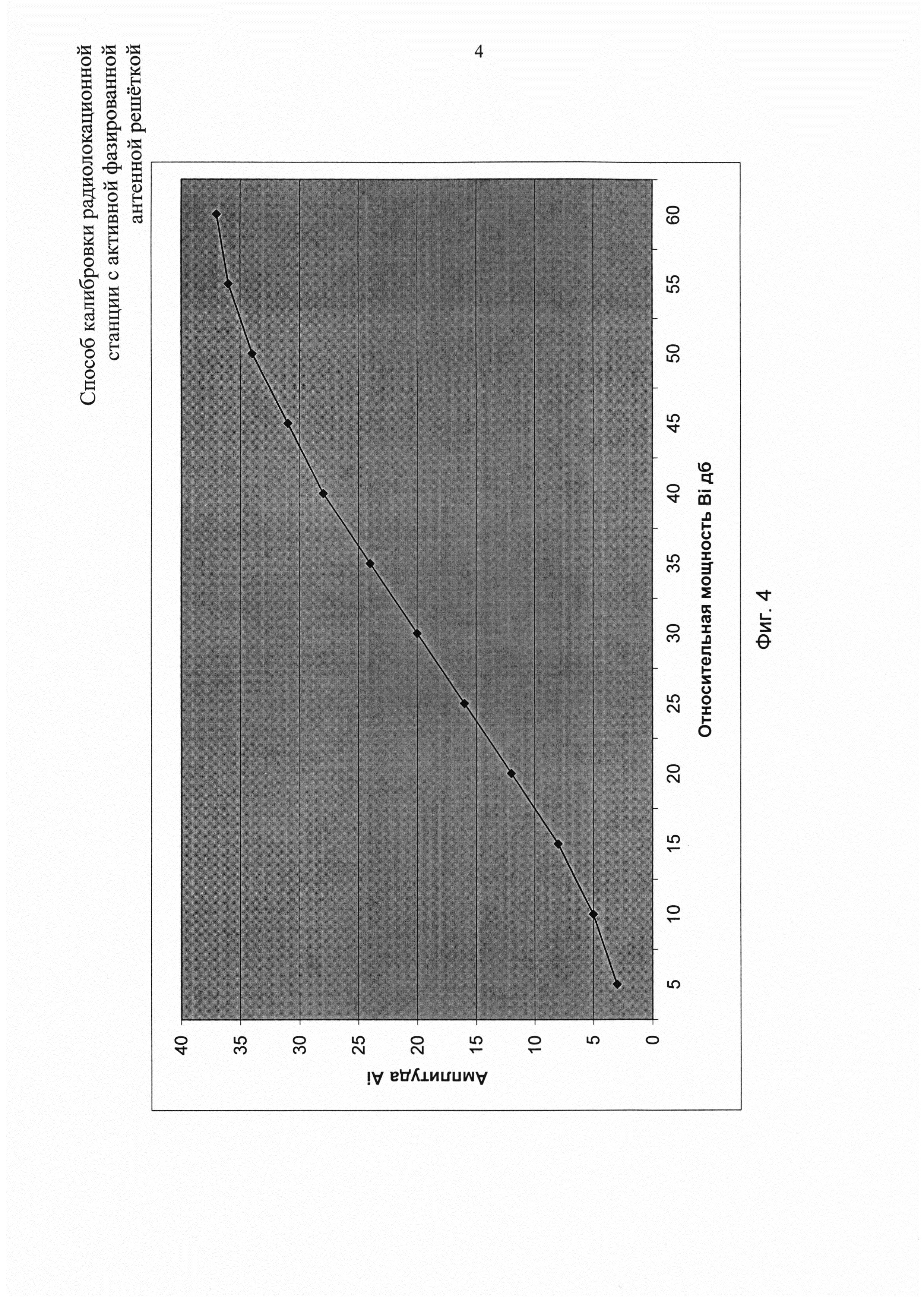
Фиг. 4 - калибровочный график зависимости значений амплитуд сигнала Ai на выходе приемников РЛС от относительного значения мощности Bi сигнала на входе приемников РЛС.
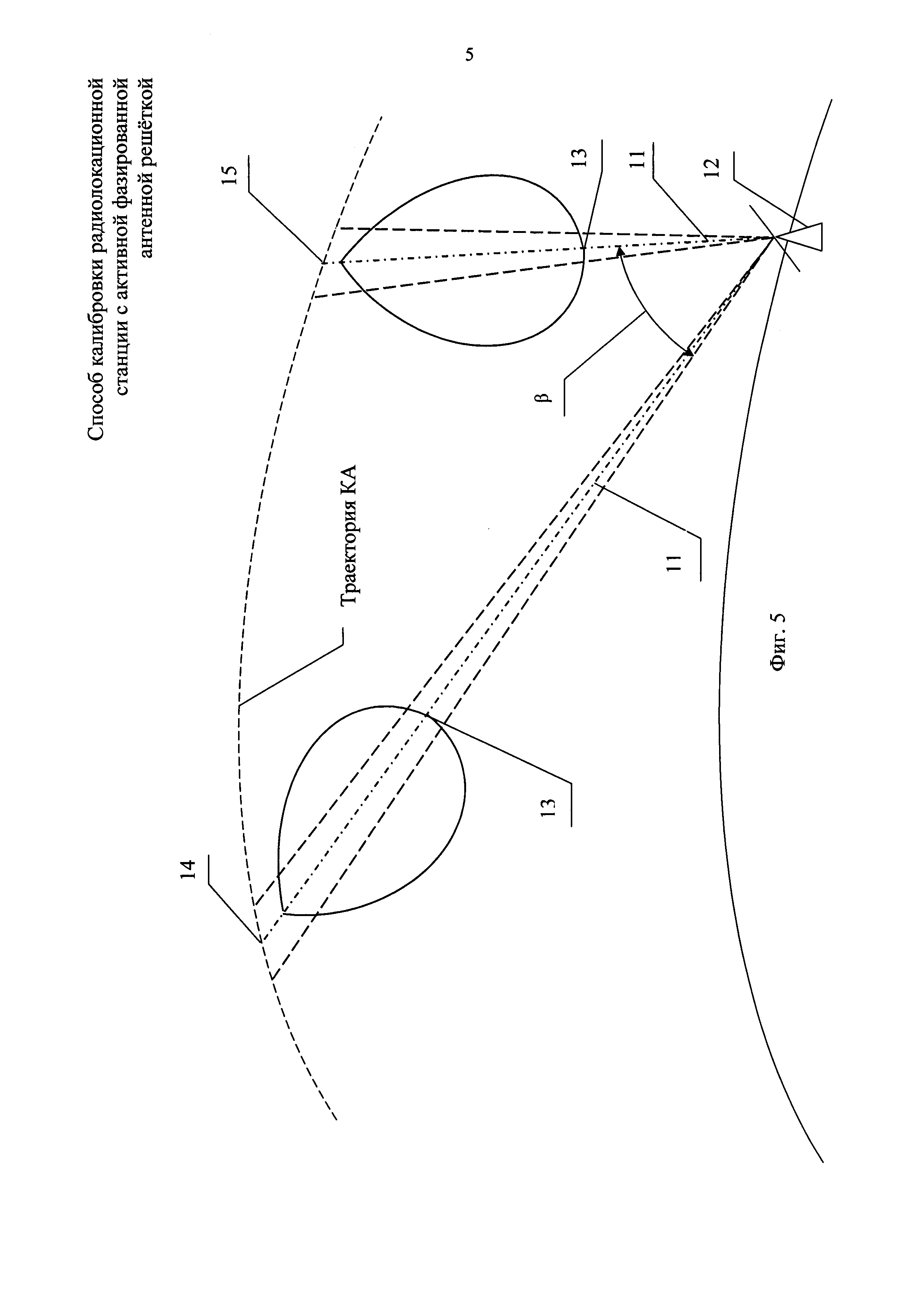
Фиг. 5 - схема проведения сеанса калибровки РЛС с АФАР, где 11 - линия визирования калибруемой РЛС 12; 13 - максимум основного лепестка индикатрисы рассеяния УО; позиция 14 - положение калибровочного КА в момент входа КА в сектор электронного сканирования луча АФАР в угломестной плоскости; позиция 15 - положение калибровочного КА, соответствующее моменту выхода КА из сектора электронного сканирования луча АФАР в угломестной плоскости; β - сектор электронного сканирования луча АФАР в угломестной плоскости.
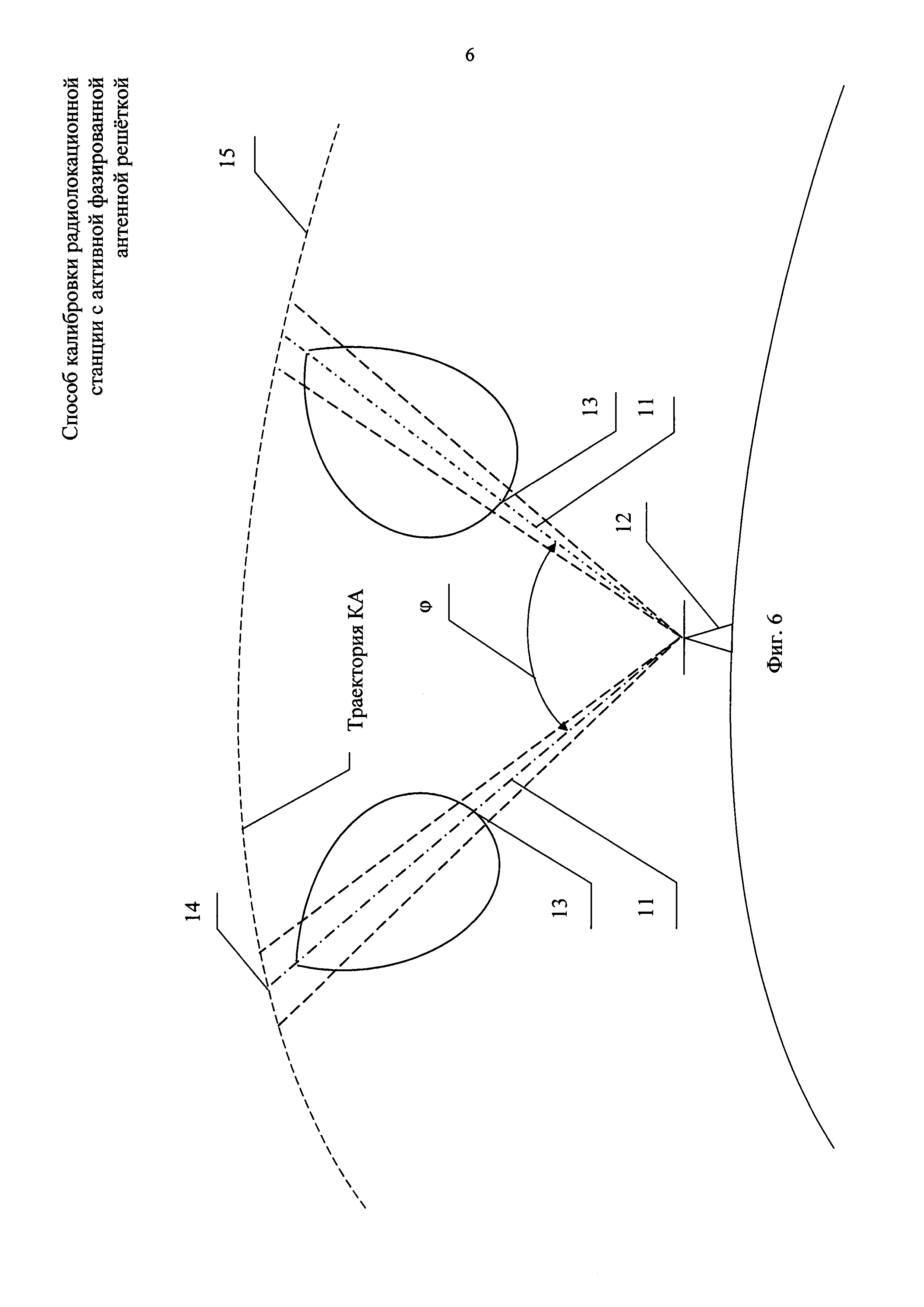
Фиг. 6 - схема проведения сеанса калибровки РЛС с АФАР, где 11-линия визирования калибруемой РЛС 12; 13 - максимум основного лепестка индикатрисы рассеяния УО; позиция 14 - положение калибровочного КА в момент входа КА в сектор электронного сканирования луча АФАР в азимутальной плоскости; позиция 15 - положение калибровочного КА соответствующее моменту выхода КА из сектора электронного сканирования луча АФАР в азимутальной плоскости; ϕ - сектор электронного сканирования луча АФАР в азимутальной плоскости.
Предложенный способ реализуется следующим образом. На этапе подготовки к запуску КА на орбиту вокруг Земли определяют координаты середины ребра и положение биссектрисы угла уголкового отражателя с гранями из двух плоских радиоотражающих пластин в плоскости, перпендикулярной середине ребра, в связанной системе координат КА.
Затем вводят их в память бортового цифрового вычислительного комплекса. Далее КА выводится на целевую орбиту. Так как местоположение стационарных РЛС и районы дислокации подвижных РЛС наземного и морского базирования априорно известно, то для обеспечения сеансов калибровки РЛС с АФАР параметры орбиты КА рассчитываются таким образом, чтобы обеспечить «пролет» КА в зоне радиовидимости калибруемых радиолокационных станций. Эта задача решается организационными методами при планировании запуска калибровочного КА путем задания требуемой орбиты (наклонения и высоты орбиты). Так, например, для регулярного наблюдения калибровочных космических аппаратов всеми радиолокационными станциями ракетно-космической обороны (РКО), расположенными на территории России, наклонение орбит должно быть не меньше 80 градусов [7].
После выведения КА на целевую орбиту для управления КА используют наземный комплекс управления с командной радиолинией и бортовую аппаратуру командной радиолинии КА. Причем с наземного комплекса управления по командной радиолинии на КА передают координаты радиолокационной станции, подлежащей калибровке по величине эффективной поверхности рассеяния. Кроме того, на КА передают предельные значения углов электронного сканирования луча АФАР в угломестной и азимутальной плоскостях (в сферической системе координат АФАР). Затем с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и БЦВК определяют текущие координаты центра масс КА, углы текущей пространственной ориентации КА. С помощью бортового цифрового вычислительного комплекса определяют положение центра масс КА относительно переданных с наземного комплекса управления координат калибруемой радиолокационной станции. Далее, используя предельные значения углов электронного сканирования луча АФАР в угломестной и азимутальной плоскостях в сферической системе координат АФАР, бортовым цифровым вычислительным комплексом осуществляют расчет времени входа КА в оба сектора электронного сканирования луча АФАР и в угломестной, и азимутальной плоскостях. Одновременно бортовым цифровым вычислительным комплексом производят расчет и определяют ориентацию осей связанной системы координат КА относительно линии визирования калибруемой РЛС с АФАР. БЦВК производят расчет и определяют также пространственное положение биссектрисы угла уголкового отражателя из двух плоских радиоотражающих пластин относительно линии визирования РЛС с АФАР на момент времени входа КА в оба сектора электронного сканирования луча АФАР и в угломестной, и азимутальной плоскостях.
При входе КА в оба сектора электронного сканирования луча АФАР по расчетным данным бортового цифрового вычислительного комплекса системой ориентации КА осуществляют совмещение положения биссектрисы угла 7 уголкового отражателя из двух плоских радиоотражающих пластин с линией визирования 11 калибруемой РЛС с АФАР 12 (см. фиг. 2, фиг. 5, фиг. 6). Затем при помощи бортового цифрового вычислительного комплекса осуществляют расчет времени выхода КА из сектора электронного сканирования луча АФАР в угломестной и азимутальной плоскостях. Последующим шагом системой ориентации КА удерживают совмещение биссектрисы угла уголкового отражателя из двух плоских радиоотражающих пластин с линией визирования калибруемой РЛС с АФАР до времени выхода КА хотя бы из одного сектора электронного сканирования луча АФАР или угломестной, или азимутальной плоскости.
Далее осуществляют калибровку радиолокационной станции с АФАР по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени меньше либо равным ΔТ, определяемым из соотношения:
ΔT=t2-t1,
где t1 - время входа КА в оба сектора электронного сканирования луча АФАР и в угломестной, и в азимутальной плоскостях;
t2 - время выхода КА хотя бы из одного сектора электронного сканирования луча АФАР или угломестной, или азимутальной плоскости.
При этом основной лепесток индикатрисы рассеяния уголкового отражателя из двух плоских радиоотражающих пластин в течение времени нахождения КА в секторах электронного сканирования луча АФАР в угломестной и азимутальной плоскостях направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния уголкового отражателя из двух плоских радиоотражающих пластин совпадает с линией визирования калибруемой радиолокационной станции с АФАР.
Кроме того, перед сеансом калибровки радиолокационной станции с АФАР по величине эффективной поверхности рассеяния или во время сеанса проводят калибровку приемников радиолокационной станции с АФАР одним из известных методов калибровки радиотехнических устройств [1] стр. 194, [8] с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников радиолокационной станции [2]. Регистрируют зависимость значений амплитуд сигнала на выходе приемников радиолокационной станции с АФАР от относительного значения мощности сигнала, представляющем собой отношение сигнал/шум, на входе приемников радиолокационной станции и получают калибровочный график (см. фиг. 4).
Причем измеренные амплитуды отраженных сигналов от уголкового отражателя регистрируют, затем по калибровочному графику пересчитывают в значения относительной мощности сигналов, отраженных от уголкового отражателя.
Значения относительной мощности сигналов, отраженных от уголкового отражателя, приводят к фиксированной дальности путем перерасчета по формуле:
 ,
,
где Bi - единичное измеренное значение относительной мощности отраженного сигнала от двугранного уголкового отражателя;
Ri - единичное измеренное калибруемой радиолокационной станцией значение наклонной дальности до КА, соответствующее данному Bi;
- величина фиксированной дальности.
«Приведенные» к фиксированной дальности значения относительной мощности отраженных сигналов от уголкового отражателя усредняют по формуле:
 ,
,
где n - число результатов единичных измерений на интервале времени ΔТ.
Полученное усредненное значение Рср используют при измерениях ЭПР баллистических и космических объектов как значение относительной мощности отраженных сигналов, соответствующее эталонному значению ЭПР двугранного уголкового отражателя.
Использование КА на орбите вокруг Земли в качестве эталона эффективной поверхности рассеяния, в корпусе которого V-образно жестко закрепляют уголковый отражатель, позволяет обеспечить стабильное значение ЭПР за счет повышения устойчивости конструкции уголкового отражателя к тепловым деформациям, возникающим из-за циклического воздействия перепада температур в условиях космического полета, и, как следствие, повышает точность калибровки радиолокационных станций с АФАР.
Использование двугранного уголкового отражателя с гранями, развернутыми на заданный угол α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, позволяет достичь «уплощения» формы основного лепестка индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости.
При этом сектор углов индикатрисы рассеяния уголкового отражателя в горизонтальной плоскости, в котором его ЭПР практически не меняется, составляет ±10 градусов [3] стр. 150, рис. 4.7, кривые 2, 3.
Ориентация КА относительно РЛС с АФАР и последующее удержание совмещения биссектрисы угла двугранного уголкового отражателя с направлением на РЛС с АФАР (линией визирования калибруемой радиолокационной станции) до момента выхода КА хотя бы из одного сектора сканирования или угломестной, или азимутальной плоскости данной РЛС позволяют осуществить высокоточную калибровку РЛС с АФАР по величине эффективной поверхности рассеяния.
При точности ориентации и стабилизации КА не хуже 0,5 градуса и 0,05 град/с соответственно [9] стр. 259 изменение ЭПР УО при локации в направлении максимума основного лепестка индикатрисы рассеяния калибровочного КА не превышает 0,5 дБ. В результате обеспечивается требуемая точность измерения ЭПР по отраженному сигналу не хуже 1 дБ [9] стр. 9.
Определение с помощью приемников навигационной системы типа «ГЛОНАСС» и/или GPS и БЦВК пространственного положения биссектрисы угла двугранного УО относительно линии визирования калибруемой РЛС с АФАР, а затем с помощью системы ориентации КА совмещение и удержание биссектрисы угла двугранного УО с линией визирования калибруемой РЛС с АФАР позволяет обеспечить стабильное значение ЭПР УО в направлении калибруемой РЛС с АФАР в течение сеанса калибровки и, как следствие, повышение точности калибровки РЛС с АФАР по величине ЭПР.
Проведение пересчета значений относительной мощности к фиксированной дальности позволяет исключить зависимость выполняемых измерений от изменения расстояния между РЛС и КА в течение сеанса калибровки РЛС по величине ЭПР.
Использование в предлагаемом способе для калибровки РЛС космического аппарата небольшой массы и объема с достаточно большой ЭПР позволяет осуществлять его запуск в качестве попутной нагрузки, что снижает стоимость вывода КА на орбиту.
Из вышеизложенного следует, что предложенные технические решения имеют преимущества по сравнению с известными способами калибровки РЛС, а именно: позволяют проводить высокоточную калибровку РЛС с АФАР. Кроме того, использование КА с УО и оснащение КА бортовой аппаратурой командной радиолинии, бортовыми приемниками навигационной системы типа «ГЛОНАСС» и/или GPS, бортовым цифровым вычислительным комплексом и при этом применение наземного комплекса управления с командной радиолинией позволяет многократно проводить сеансы калибровки РЛС с АФАР и оперативно осуществлять «перенацеливание» КА для калибровки подвижных РЛС с АФАР наземного и морского базирования. В этом случае достаточно передать на борт КА только координаты калибруемой РЛС и предельные значения углов электронного сканирования луча АФАР в угломестной и азимутальной плоскостях. Все остальные расчеты и управление КА выполняются бортовым цифровым вычислительным комплексом.
Источники информации
1. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей / под ред. Колосова М.А. М.: Советское радио. 1972. С. 19-20, с. 144-145, с. 178-179, с. 193-194, с. 204-213.
2. Олин (I.D. Olin). Динамические измерения радиолокационных поперечных сечений // ТИИЭР. 1965. Т. 53. №8.
3. Кобак В.О. Радиолокационные отражатели / под ред. Леонтьевского О.Н. М.: Советское радио. 1975. С. 103, с. 144, с. 146, с. 150, с. 152, с. 235.
4. Леонов А.И., Леонов С.А., Нагулинко Ф.В. и др. Испытания РЛС / под ред. Леонова А.И. М.: Радио и связь. 1990. С. 37, с. 51.
5. Патент RU №2535661 «Способ калибровки радиолокационной станции по миниспутнику с эталонным значением эффективной поверхности рассеяния» / Мисник В.П., Кулешов Ю.П., Полуян А.П., Рябцева Н.В., Тучин В.Н. Открытое акционерное общество «Корпорация космических систем специального назначения «Комета».
6. Перунов Ю.М., Мацукевич В.В., Васильев А.А. Зарубежные радиоэлектронные средства / под ред. Перунова Ю.М. В 4-х книгах. Кн. 1: Зарубежные радиоэлектронные средства. М.: Радиотехника. 2010. С. 183, 329.
7. Бондаренко А.П., Курикша А.А., Суханов С.А., Фатеев В.Ф. К вопросу о создании группировки легких космических аппаратов для калибровки РЛС РКО // Успехи современной радиоэлектроники. 2010. №3. С. 5.
8. Проверка радиоизмерительных приборов. Сборник инструкций, издание официальное. Стандартгиз. 1961.
9. Малые космические аппараты информационного обеспечения / под ред. Фатеева В.Ф. М.: Радиотехника. 2010. С. 47-50, с. 259.
11. Хансен Р.С. Фазированные антенные решетки / Перевод с английского под ред. Синани А.И. М.: Техносфера. 2012. С. 33-34, 61-65, 223-229.
12. Перунов Ю.М., Мацукевич В.В., Васильев А.А. Зарубежные радиоэлектронные средства / под ред. Перунова Ю.М. В 4-х книгах. Кн. 3: Антенны. М.: Радиотехника. 2010. С. 75.
Многофункциональный космический аппарат
Способ калибровки радиолокационной станции по величине эффективной поверхности рассеяния при проведении динамических измерений эффективной поверхности рассеяния исследуемых объектов
Способ калибровки радиолокационной станции, работающей на волнах круговой поляризации при параллельном приеме отраженных сигналов, по величине эффективной поверхности рассеяния при динамических измерениях эффективной поверхности рассеяния баллистических и космических объектов
Космический аппарат для калибровки радиолокационной станции по величине эффективной поверхности рассеяния
Способ калибровки радиолокационной станции с использованием космического аппарата с эталонными отражательными характеристиками
Радиолокационный уголковый отражатель
Космический аппарат для калибровки радиолокационных станций
Способ обзора космического пространства между солнцем и землёй, недоступного для наблюдения оптическими средствами, находящимися на земле и на околоземных орбитах, из-за их засветки солнцем, с космического аппарата, размещённого на орбите земли на постоянном расстоянии от земли
Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для земли небесных тел - астероидов и комет
Космическая система обзора небесной сферы для обнаружения небесных тел
Многофункциональный космический аппарат

