Результат интеллектуальной деятельности: ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ
Вид РИД
Изобретение
Изобретение относится к механизмам, применяемым в технике для получения заданного движения выходного звена.
Известен дельта-робот [Clavel R. Device for the movement and positioning of an element in space, US Patent No. 4976582, Dec. 11, 1990], имеющий пространственную параллельную структуру и состоящий из трех рычагов, прикрепленных с помощью вращательных шарниров к стойке. В параллельных цепях механизма используются параллелограммы, позволяющие сохранять пространственную ориентацию выходного звена. Недостатком такого устройства является невозможность воспринимать выходным звеном большие нагрузки ввиду исполнения параллельных цепей в виде параллелограммов, а также ограниченное число степеней свободы выходного звена, равное четырем (линейные смещения вдоль каждой из трех осей координат и поворот вокруг оси, перпендикулярной основанию).
Наиболее близким к предлагаемому устройству является поворотный гексапод с круговой направляющей [Coulombe J., Bonev I.A. A New Rotary Hexapod for Micropositioning. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany. 2013, pp. 877-880, Fig. 4], относящийся к механизмам параллельной структуры и включающий стойку, выполненную в виде двойной замкнутой круговой направляющей, выходное звено в виде платформы, шесть кинематических цепей, включающих каждая каретку и промежуточные звенья, обеспечивающих три выхода на платформу. Движение выходного звена контролируется шестью двигателями, которые приводят в движение каретки, выполняющие в механизме роль ведущих звеньев.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в невозможности полного контроля движений платформы при использовании менее шести приводов, в частности, одного привода.
Техническая проблема заключается в создании такого механизма параллельной структуры, в котором движение выходного звена могло бы контролироваться единственным приводом.
Сущность заявляемого устройства заключается в том, что предлагается пространственный механизм для микропозиционирования, включающий в себя установленную на основании круговую направляющую, выходное звено, шесть кинематических цепей, соединяющих установленные на круговой направляющей шесть кареток с выходным звеном. Кинематические цепи выполнены в виде жестких стержней, которые соединены с одного конца посредством шарниров с подвижными каретками, а другие концы стержни попарно от смежных кареток сопряжены с выходным звеном с помощью двухсторонних шарниров. Кроме того на основании в центре круговой направляющей установлено вращающееся зубчатое цилиндрическое колесо, на оси которого собраны радиальные соединительные тяги от всех кареток. При этом между центральным зубчатым колесом и каждой кареткой в радиальном направлении смонтирована кинематическая цепь, включающая в себя находящееся в зацеплении с центральным зубчатым колесом ведомое зубчатое колесо, выполненное за одно целое с ним ведущий шкив гибкой ременной передачи. Ременная передача связана с выходным шкивом, на котором установлен кривошип, сопряженный с шатуном, расположенным подвижно на горизонтальной тяге. Кривошип имеет линейный размер больше, чем радиус ведомого шкива и на нем выполнены отверстия с возможностью установки вращательных пар на разном расстоянии от центра вращения ведомых шкивов.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в том, что движение выходного звена контролируется единственным приводом к центральному зубчатому колесу, расположенного внутри круговой направляющей нового одноподвижного механизма, подвижные звенья которого жестко соединены с каретками, установленными на единственной круговой направляющей и на которые устанавливаются шесть кинематических цепей, ориентирующих выходное звено в пространстве.
Предлагаемое изобретение поясняется чертежом,
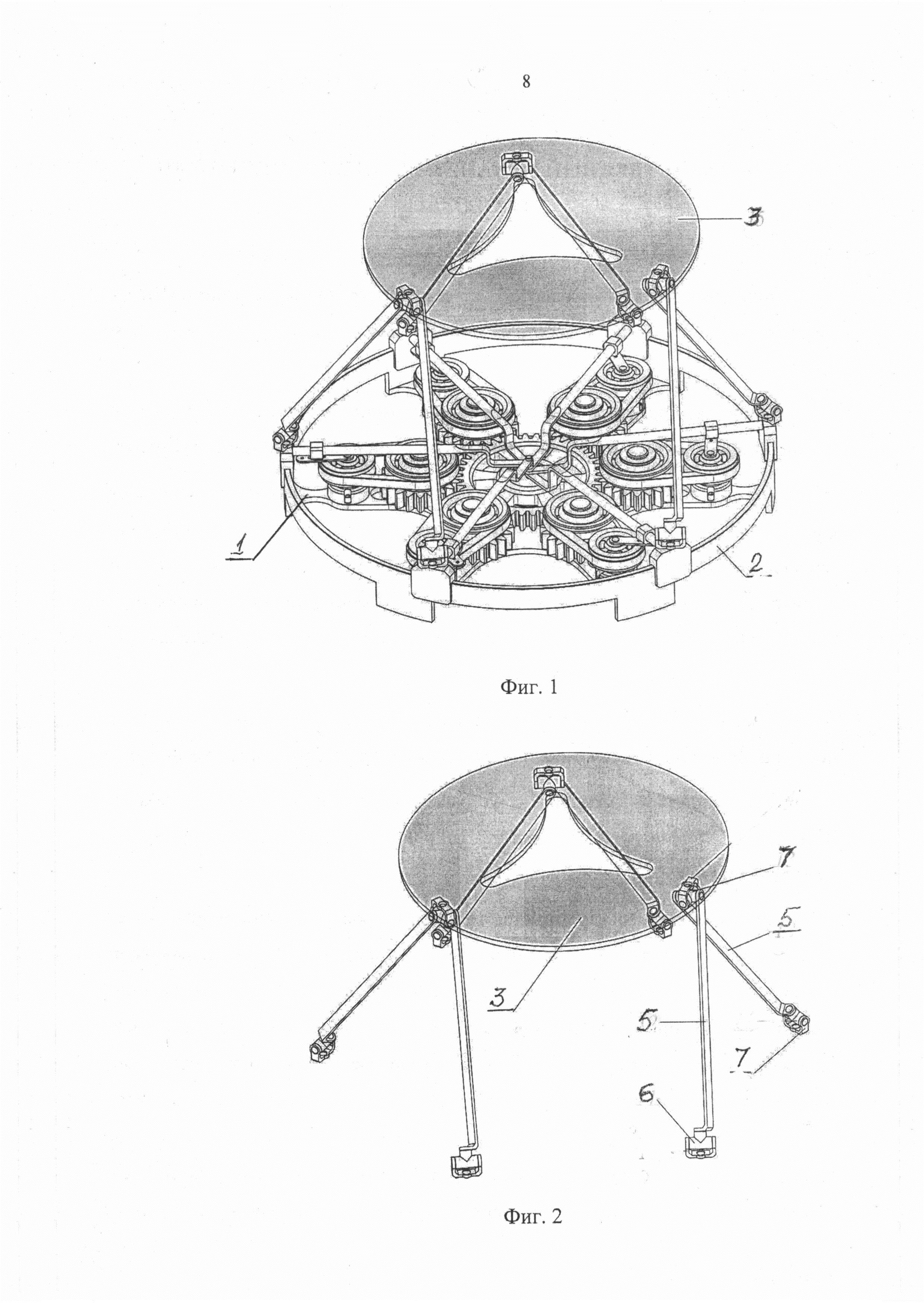
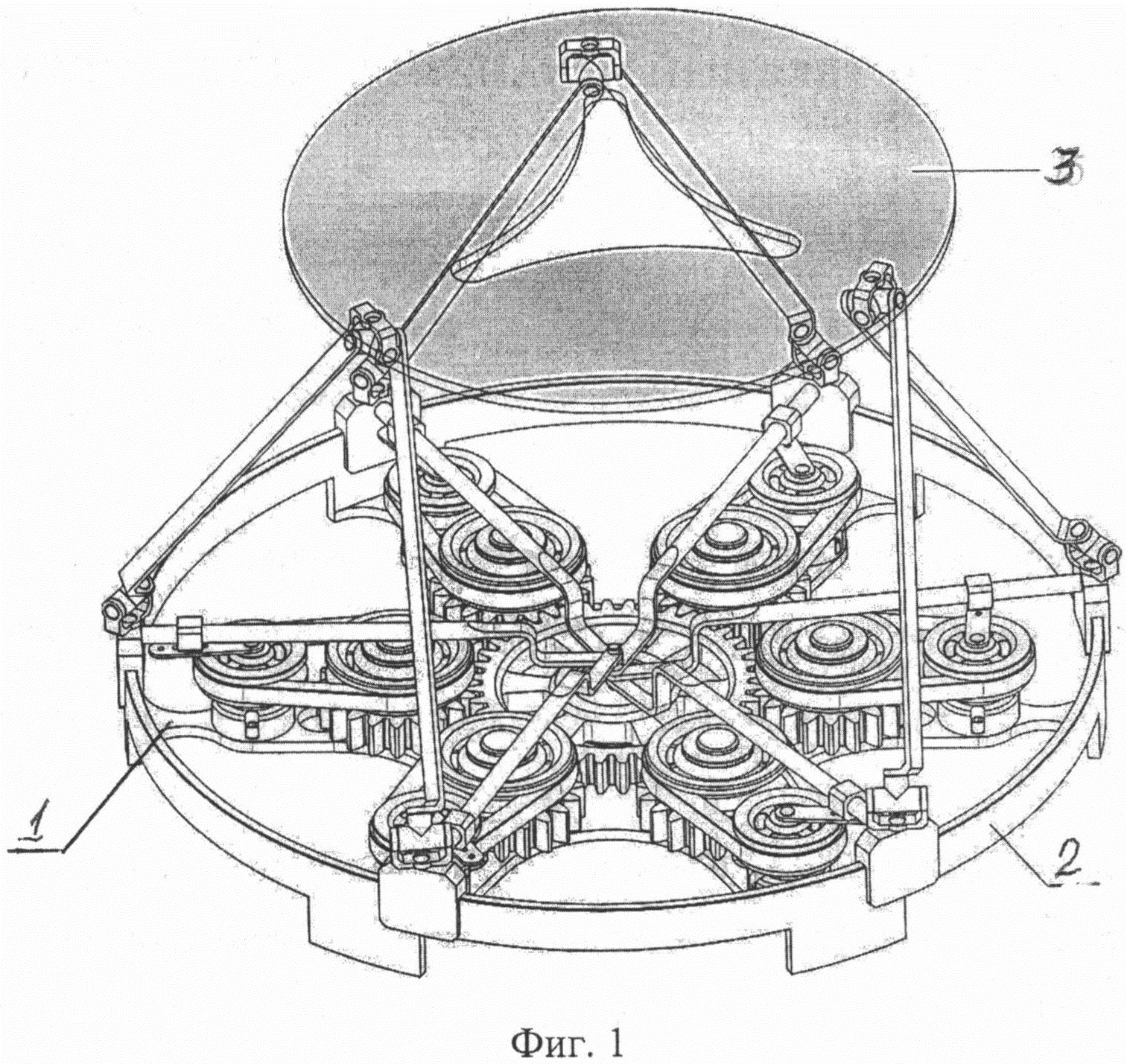
Где на фиг. 1 показан пространственный механизм для микропозиционирования,
на фиг. 2 показана пространственная кинематическая цепь параллельной структуры,
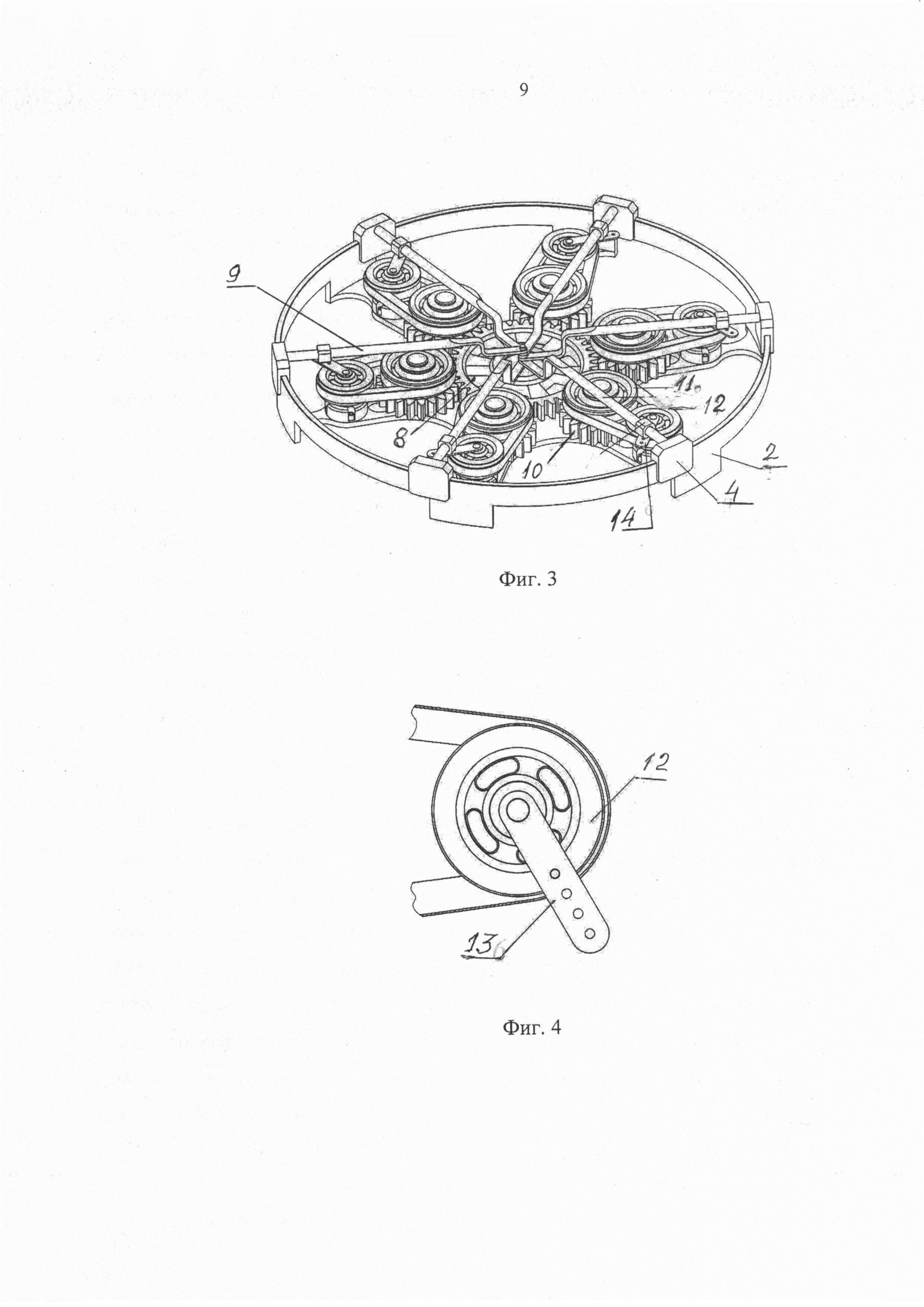
на фиг. 3 показан одноподвижный плоский механизм,
на фиг. 4 показан ведомый диск с кривошипом.
Пространственный механизм для микропозиционирования, включает в себя установленную на основании 1 круговую направляющую 2, выходное звено 3, шесть кинематических цепей, соединяющих установленные на круговой направляющей 2 шесть кареток 4 и выходное звено 3. Кинематические цепи выполнены в виде жестких стержней 5, соединенные с одного конца посредством шарниров 6 с подвижными каретками 3, а другие концы - попарно от смежных кареток сопряжены с выходным звеном 3 с помощью двухсторонних шарниров 7. На основании 1 в центре круговой направляющей 2 установлено вращающееся зубчатое цилиндрическое колесо 8, на оси которого собраны радиальные соединительные тяги 9 от шести кареток, причем между центральным зубчатым колесом 8 и каждой кареткой 4 в радиальном направлении смонтирована кинематическая цепь, включающая в себя находящееся в зацеплении с центральным зубчатым колесом 8 ведомое зубчатое колесо 10, выполненное за одно целое с ним ведущий шкив 11 гибкой ременной передачи, на ведомом шкиве 12 которой установлен кривошип 13, сопряженный с шатуном 14, подвижным на радиальной тяге 9.
Пространственный механизм работает следующим образом.
Центральный зубчатое колесо 8 образует центральную вращательную кинематическую пару с зубчатыми цилиндрическими колесами 10 всех шести кинематических цепей. Ведущие шкивы 11, жестко установленные на колесах 10, соединены с ведомыми шкивами 12 посредством гибкой связи. Кривошипы 13, жестко установленные на ведомых шкивах 12, с одной стороны являются частью вращательных кинематических пар, а с другой - с соединительными тягами 9 - поступательные кинематические пары. При этом звенья 10 образуют с центральным колесом 8 вращательные кинематические пары. Каретки 3 входят со стойкой 1 и промежуточными звеньями 10 во вращательные кинематические пары. Оси вращательных пар направлены перпендикулярно плоскости движения кареток 4. Звенья, соединяющие каретки 4 с выходным звеном 3 также соединяются между собой вращательными кинематическими парами.
Механизм, изображенный на фиг. 1, образуется путем соединения пространственной кинематической цепи параллельной структуры, приведенной на фиг. 2, и плоского одноподвижного механизма, показанного на фиг. 3, посредством установки промежуточных звеньев на каретки через вращательные кинематические пары. Полученный таким образом пространственный механизм параллельной структуры приводится в движение поворотом центрального диска, который полностью контролирует движение выходного звена.
С учетом того, что на кривошипах 13 выполнены отверстия с возможностью установки вращательных пар на разном расстоянии от центра вращения ведомых шкивов 12 (фиг. 4), появляется возможность получать разные перемещения кареток 4 для каждой кинематической цепи механизма, тем самым изменяя траекторию движения выходного звена 3.
Принцип работы механизма заключается в следующем. При вращении центрального зубчатого колеса 8, движение передается на колеса 10, которые приводят в движение ведущие диски 11 за счет того, что они жестко соединены с колесами 10. Далее через гибкие связи движение передается ведомым дискам 12, а соответственно, и жестко соединенным с ними кривошипам 13, которые вращаясь, приводят в движение шатунам 14, которые смещаясь вдоль радиальных тяг 9, будут отклонять его, перемещая каретки 4 относительно направляющей 1. Движение от кареток 9 передается на промежуточные звенья 5, которые приводят в движение выходное звено 3, ориентируя его на заданные углы и расстояния относительно основания 1.
Применение предлагаемого устройства целесообразно для задания пространственной ориентации объектов и их смещения на малые расстояния, а также для выполнения цикличных операций, требующих движение по заданной траектории. Предлагаемый механизм может быть использован при создании реабилитационного медицинского оборудования.
Способ определения физико-механических характеристик модифицированного поверхностного слоя материала изделия и устройство для его осуществления
Способ мониторинга степени деградации структуры материала и определения остаточной прочности изделия
Образец для оценки когезионной прочности порошковых металлических покрытий
Способ управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя
Способ работы воздушно-реактивного двигателя и устройство для его реализации (варианты)
Способ работы прямого и обратного обратимого термоэлектрического цикла и устройство для его реализации (варианты)
Турбобур
Стан для раскатки колец из жаропрочных сплавов
Комбинированная лазерно-водородная технология упрочнения поверхностей деталей из металлов и сплавов
Линейный электрогенератор
Рычажный прямолинейно-направляющий механизм
Шестиподвижный пространственный манипулятор параллельно-последовательной структуры
Четырехподвижный плоский манипулятор параллельной структуры

