Результат интеллектуальной деятельности: Система обеспечения посадки вертолёта (варианты)
Вид РИД
Изобретение
Система обеспечения посадки вертолета (варианты)
Область техники
Изобретение относится к области авиации, а именно к акустическим средствам обеспечения посадки вертолета.
Уровень техники
Посадка вертолета на неподготовленную площадку - один из ответственных элементов пилотирования вертолета. Одной из ключевых проблем при посадке на неподготовленные площадки являются условия недостаточной видимости. Под условиями недостаточной видимости понимается слабая или нулевая оптическая видимость закабинной обстановки, обусловленная любым из следующих факторов или их сочетанием: слабая освещенность, неблагоприятные метеорологические условия (туман, метель и т.д.), поднимаемый винтом вертолета вихрь твердых частиц. При посадке на сухой или заснеженный грунт воздушная струя от несущего винта вертолета поднимает твердую взвесь, что критически снижает видимость и может привести к неправильной оценке пилотом положения вертолета относительно земли, кроме того, могут остаться незамеченными препятствия в зоне посадки (большие камни, статичные и движущиеся объекты).
Использование традиционных радиовысотомеров, субмиллиметровых волн, лидаров и приборов инфракрасного видения полностью не решают проблему автоматической посадки вертолетов в сложных метеоусловиях, особенно на заключительной стадии полета - посадки, и до сих пор она выполняется пилотом вручную.
Последним направлением в этой области является разработка систем так называемого «синтетического зрения», когда заранее в хороших метеоусловиях делается оптическая съемка местности, которая закладывается в память системы обработки и ее трехмерное изображение воспроизводится на дисплее пилота при посадке. Однако такие системы требуют сбора громадного объема данных, слишком дороги и, в основном, рассчитаны на их применение в военной авиации. Вместе с тем, в гражданской авиации, из-за отсутствия развитой инфраструктуры во многих районах и широкого использования вертолетов для решения самых разнообразных задач, потребность в системах «слепой» посадки чрезвычайно велика.
Практически все навигационные системы используют принцип разностно-дальномерной фазовой или корреляционной навигации. Он заключается в том, что излучаемый радиосигнал принимается разнесенной системой приемников (антенн). Для активной системы достаточно иметь всего три приемника для измерения трех координат вертолета. В каждом приемнике измеряется время задержки между опорным сигналом (излученным) и принятым, что дает возможность определить величины геометрических длин лучей, соединяющих вертолет, как точечный отражатель, и отдельные приемники. Задержки определяют либо корреляционной обработкой, либо измерением разности фаз. Определив все длины лучей, можно легко определить все три координаты вертолета. Разрешающая способность по расстоянию определяется либо длительностью излученного импульса (в фазовых системах), либо шириной полосы излученного сигнала:
где C0 - скорость света, τ - длительность импульса, ΔF - ширина частотной полосы сигнала. Так как скорость света составляет 3*108 м/с, то очевидно, что для того, чтобы получить высокое разрешение, необходимо излучать очень короткие импульсы или очень широкополосные сигналы. Так, если требуется разрешение порядка 0,3 метра, то необходимо иметь длительность сигнала порядка τ=10-9 с или полосу частот ΔF=1ГГц. Излучение сигналов с такими параметрами при достаточной мощности представляет сложную техническую задачу. Необходимо также учитывать и другой аспект - чем короче длина электромагнитной волны, тем система становится более подвержена влиянию атмосферных неоднородностей, особенно сильно влияют гидроксильные группы, вызывая заметное рассеяние и поглощение сигналов гигагерцового диапазона.
Использование акустических методов определения текущих координат вертолета по его шумоизлучению известны, например, Loewy, Aurel detection of Helicopters in Tactical Situations, J. Am. Helicopter Soc, vol. 8, №4, 1983, pp. 36-53; Libkin Y.I., An Acoustic Distant Earlil Warning (DEW) Line, Defense Science, vol. 7, №2, 1968, pp. 12-18; Broadbent S., Ferranti Unveils Acoustic Telescope, Jane's Defense Weekly, vol. 5, №25, 1986, pp. 1262-1265.
В известных решениях используют принцип разностно-дальномерной навигации с фазовой или корреляционной обработкой принимаемых сигналов щумоизлучения вертолета, состоящий в том, что в районе посадки располагается микрофонная система, состоящая минимум из трех-четырех акустических приемников с заданным разнесением, один из которых расположен вертикально для измерения угла места. Сравнивая времена задержек сигналов между сигналами (или их фазы), принимаемыми отдельными акустическими приемниками, и, зная расстояния между ними, можно определять все текущие координаты вертолета - его положение в горизонтальной плоскости, дальность и высоту.
Основные особенности режима посадки, влияющие на функционирование систем обеспечения посадки, состоят в следующем. При посадке вертолета можно выделить следующие участки:
- выравнивание, представляющее собой снижение вертолета с высоты порядка 180-200 метров по наклонной траектории с вертикальной скоростью не более 3 м/с, в процессе которого эта скорость уменьшается до 0,5-1 м/с;
- выдерживание - дальнейшее снижение вертикальной скорости и поступательной скорости до значений близких к нулю почти на постоянной высоте;
- кратковременное зависание на высоте 2-3 метра;
- вертикальное снижение с постепенным уменьшением вертикальной скорости до 0,2 м/с.
Именно на этих участках маневрирования к акустической системе обеспечения посадки предъявляется требование повышенной точности определения координат при влиянии описываемых далее физических факторов.
Обычно предполагают, что вертолет является «точечным» источником шума, т.е. диаграмма направленности шумов вертолета приблизительно одинакова в секторе 360 градусов. Экспериментальные измерения, выполненные при длительной экспозиции, это подтверждают. Однако эти диаграммы направленности сняты путем обхода шумомером стоящего вертолета с работающим винтом, причем в каждой точке время измерения составляло не менее 10-15 секунд. В режиме полета распределение звукового давления от шума вращения винта происходит по спирали, т.е. оно не изотропно. Поэтому только на больших расстояниях вертолета от приемной антенны (дальняя зона) его можно считать точечным источником шума. Критерием больших расстояний являются следующие соотношения. Если размер приемной антенны равен L, то ее дальняя зона определяется как R>>2L2/λ, где λ - наибольшая длина волны учитываемого спектра шумоизлучения. Так, если размер антенной решетки составляет 1 метр, а эффективная нижняя частота -330 Гц (λ=1 м), то дальняя зона приемной антенны располагается на расстоянии более 30 метров. Однако в реальности размер "акустического источника" приблизительно равен диаметру несущего винта, т.е. порядка 20 метров, и такой источник можно считать точечным для данной частоты с гораздо больших расстояний, порядка - 100 метров. На меньших расстояниях, когда размеры приемной антенны, размеры акустического источника, дистанции до вертолета и его точки посадки будут соизмеримы, оценки функций взаимной корреляции могут быть неустойчивы и содержать несколько максимумов. И такая многозначность функций корреляции может вызывать большие ошибки в определении координат, особенно значения высоты, которая в режиме посадки является определяющей. Если вместо функций корреляции измеряются сдвиги фаз между отдельными составляющими сигналов в микрофонах, то они будут сильно флуктуировать, что будет вносить существенные ошибки в оценку координат.
Существует еще один физический эффект, который затрудняет точное вычисление координат вертолета по его шуму на малых расстояниях, и особенно его высоты, и он связан с распределением воздушных потоков под винтом в режиме зависания.
При движении вертолета в воздухе по горизонтали соответствующие зоны возмущения воздушного потока будут лишь смещаться по потоку, но сущность их останется той же. Рассмотрим процесс движения воздуха вблизи вертолета воздушным потоком «сверху вниз» - по пути движения воздуха, обтекающего вертолет. Работа винта вертолета приводит к тому, что отбрасываемая вниз под вертолет масса воздуха создает над винтом некий «купол разряжения», в котором резко падает плотность воздуха и соответственно, давление воздуха. Это и создает сверхмощные «компенсационные» градиенты (перепады) плотности и атмосферного давления, направленные извне (из окружающей воздушной среды) в сторону купола разряжения над работающим винтом. Известно, что эти градиенты плотности и давления воздуха и являются той движущей силой, которая создает массовое, и довольно мощное движение воздуха большой скорости в связи с огромными локальными значениями этих градиентов. Это движение воздуха над вертолетом извне, по направлению к куполу резкого падения плотности и давления, конечно, будет уже содержать имевшуюся в нем до этого турбулентно-пульсационную атмосферную составляющую. Но, по сравнению с сильно турбулизированным воздушным движением под вертолетом, это движение воздуха над вертолетом можно вполне считать для данной задачи псевдоламинарным и поэтому его начальной турбулентностью можно для данного анализа пренебречь.
Движения воздуха под вертолетом, вызванные несущим винтом вертолета - это и есть турбулентный спутный след (ТСС) под вертолетом. Они имеют намного большую скорость, чем таковые над вертолетом, являются чрезвычайно турбулизированными и имеют тип мощного струйного течения - они более узконаправленны и являются значительно более скоростными и протяженными, чем движения над вертолетом. Из-за наличия ТСС при зависании вертолета на малых высотах принятые сигналы акустических приемников могут оказаться раскоррелированными и точность измерения высоты будет ухудшаться.
Из уровня техники известна система управления вертолетом (патент JPH8-7199, дата публикации 12.01.1996), которая принципиально состоит из пяти акустических приемников, расположенных в определенной конфигурации, блока обработки и передатчика. Каждый акустический приемник принимает акустический сигнал от вертолета, при этом возможность принятия сигнала от отдельных элементов вертолета не предусмотрена. В блоке обработки для каждой из трех пар акустических приемников (пары формируют из имеющихся пяти акустических приемников) определяют разность фаз принятых звуковых волн. Всего получают три несвязанных между собой разности фаз звуковых волн. По ним затем в блоке обработки при известной схеме расположения акустических приемников определяют пространственные координаты вертолета. Пространственные координаты из блока обработки передают к передатчику, а от него к вертолету.
Недостатком аналога является невысокая точность определения пространственных координат на этапе посадки вертолета. Причина этого в том, что на этапе посадки вертолет находится вблизи от посадочной площадки и рассматривание вертолета как точечного источника шума приводит к значительным погрешностям при определении координат.
Наиболее близким техническим решением (прототип) является система управления летательным аппаратом (патент KR10-1288260, дата публикации 26.07.2013), которая состоит из блока определения положения летательного аппарата, расположенного на земле, и блока определения положения летательного аппарата, расположенного на летательном аппарате. При этом каждый из указанных блоков выполнен с возможностью принимать и обрабатывать сигналы различного типа от другого блока, а также отправлять сигналы другому блоку. На земле расположен блок, содержащий несколько акустических приемников. Акустические приемники принимают акустический сигнал от летательного аппарата (при этом возможность принятия сигнала от отдельных элементов летательного аппарата не предусмотрена), по которым затем с учетом разности фаз звуковых волн определяют пространственные координаты летательного аппарата. На летательном аппарате расположен блок, содержащий приемник GPS и радиовысотомер. Посредством GPS на летательном аппарате также определяют пространственные координаты, а радиовысотомер позволяет определять высоту на этапе посадки летательного аппарата.
Недостатком прототипа является недостаточная безопасность посадки из-за невысокой точности определения положения вертолета при помощи акустических приемников на этапе посадки летательного аппарата. Причина этого в том, что на этапе посадки летательный аппарат находится вблизи от посадочной площадки и рассматривание летательного аппарата как точечного источника шума приводит к значительным погрешностям при определении координат. Также в прототипе используют радиовысотомер для измерения высоты, который на высоте менее 4-5 метров измеряет высоту со значительной погрешностью. Кроме того, точность измерения высоты с помощью радиовысотомера зависит от погодных условий.
Техническим результатом предлагаемого изобретения является повышение безопасности посадки вертолета вследствие повышения точности определения положения вертолета акустическим способом.
Указанный технический результат достигается за счет того, что, по первому варианту, в системе обеспечения посадки вертолета, содержащей ультразвуковой высотомер, приемник, блок обработки информации и управления, средство отображения, четыре акустических приемника, блок обработки данных, передатчик, причем блок обработки данных включает в себя четыре регулируемых фильтра, четыре аналого-цифровых преобразователя, блок вычисления пространственных координат, блок вычисления высоты, блок вычисления показателей отклонения высоты, блок вычисления показателей отклонения пространственных координат, блок выявления превышения показателей отклонения высоты, блок выявления превышения показателей отклонения пространственных координат, блок хранения предельных показателей отклонения высоты и блок хранения предельных показателей отклонения пространственных координат, каждый из акустических приемников соединен с основным входом соответствующего ему регулируемого фильтра, выход каждого регулируемого фильтра соединен со входом соответствующего ему аналого-цифрового преобразователя, выход каждого аналого-цифрового преобразователя соединен со входом блока вычисления пространственных координат и со входом блока вычисления высоты, выход блока вычисления пространственных координат соединен со входом передатчика и со входом блока вычисления показателей отклонения пространственных координат, выход блока вычисления показателей отклонения пространственных координат соединен с первым входом блока выявления превышения показателей отклонения пространственных координат, выход блока хранения предельных показателей отклонения пространственных координат соединен со вторым входом блока выявления превышения показателей отклонения пространственных координат, выход которого соединен с управляющим входом каждого из регулируемых фильтров, выход блока вычисления высоты соединен со входом передатчика и со входом блока вычисления показателей отклонения высоты, выход блока вычисления показателей отклонения высоты соединен с первым входом блока выявления превышения показателей отклонения высоты, выход блока хранения предельных показателей отклонения высоты соединен со вторым входом блока выявления превышения показателей отклонения высоты, выход которого соединен со входом передатчика, при этом передатчик и приемник выполнены и расположены с обеспечением возможности передачи сигнала от передатчика к приемнику, приемник соединен со входом блока обработки информации и управления, выход блока обработки информации и управления соединен со входом средства отображения, а блок обработки информации и управления соединен с ультразвуковым высотомером с обеспечением возможности передачи ему команды на измерение высоты и получения значения измеренной высоты, при этом четыре акустических приемника, блок обработки данных, передатчик размещены на поверхности земли вблизи места посадки, а приемник, блок обработки информации и управления, средство отображения, ультразвуковой высотомер размещены на вертолете, по второму варианту, в системе обеспечения посадки вертолета, содержащей ультразвуковой высотомер, приемник, блок обработки информации и управления, средство отображения, четыре акустических приемника, блок обработки данных, передатчик, причем блок обработки данных выполнен в виде вычислительного устройства с загруженным программным обеспечением, обеспечивающего фильтрацию электрического сигнала от каждого из акустических приемников с получением отфильтрованных сигналов, оцифровку каждого из отфильтрованных сигналов с получением оцифрованных сигналов, вычисление пространственных координат вертолета относительно места посадки и высоты вертолета относительно места посадки по оцифрованным сигналам с получением вычисленных пространственных координат вертолета относительно места посадки и получением вычисленной высоты вертолета относительно места посадки, передачу вычисленных пространственных координат вертолета относительно места посадки и вычисленной высоты вертолета относительно места посадки передатчику, а также вычисление показателей отклонения вычисленных пространственных координат вертолета относительно места посадки, вычисление показателей отклонения вычисленных высот вертолета относительно места посадки, выявление превышения вычисленных показателей отклонения вычисленных пространственных координат вертолета относительно места посадки над заранее заданными предельными показателями отклонения вычисленных пространственных координат вертолета относительно места посадки, выявление превышения вычисленных показателей отклонения вычисленных высот вертолета относительно места посадки над заранее заданными предельными показателями отклонения вычисленных высот вертолета относительно места посадки, повышение, при выявлении превышения вычисленных показателей отклонения вычисленных пространственных координат вертолета относительно места посадки над заранее заданными предельными показателями отклонения вычисленных пространственных координат вертолета относительно места посадки, нижней границы полосы пропускаемых частот при фильтрации электрического сигнала от каждого из акустических приемников, передачу сигнала на включение ультразвукового высотомера, при выявлении превышения вычисленных показателей отклонения вычисленных высот вертолета относительно места посадки над заранее заданными предельными показателями отклонения вычисленных высот вертолета относительно места посадки, передатчику, кроме того, каждый из акустических приемников соединен со входом блока обработки данных, а выход блока обработки данных соединен со входом передатчика, при этом передатчик и приемник выполнены и расположены с обеспечением возможности передачи сигнала от передатчика к приемнику, приемник соединен со входом блока обработки информации и управления, выход блока обработки информации и управления соединен со входом средства отображения, а блок обработки информации и управления соединен с ультразвуковым высотомером с обеспечением возможности передачи ему команды на измерение высоты и получения значения измеренной высоты, при этом четыре акустических приемника, блок обработки данных, передатчик размещены на поверхности земли вблизи места посадки, а приемник, блок обработки информации и управления, средство отображения, ультразвуковой высотомер размещены на вертолете.
Краткое описание чертежей
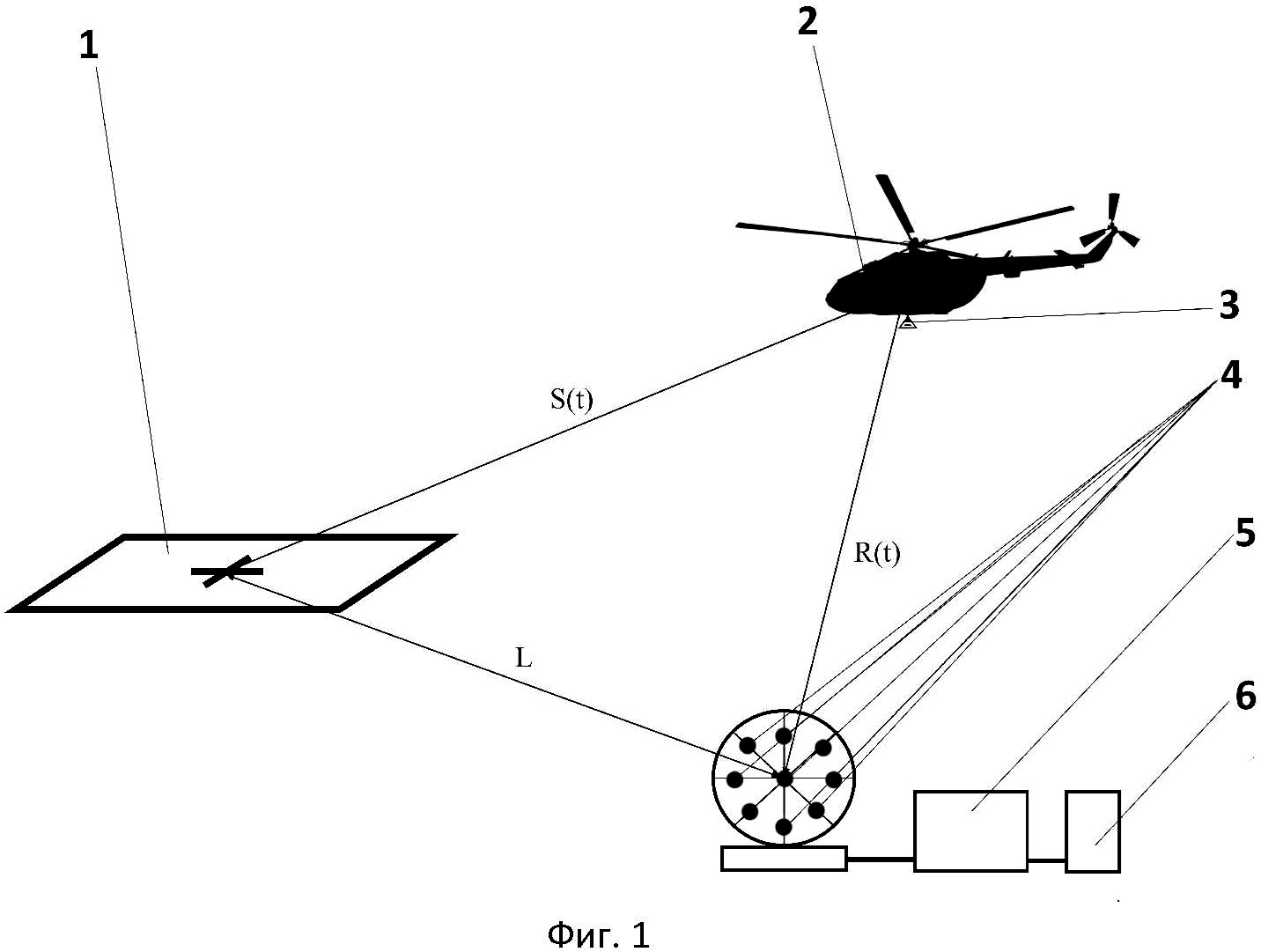
Изобретение поясняется чертежом (фиг. 1-2), где на фиг. 1 представлено пояснение использования акустической системы, на фиг. 2 изображена блок-схема системы.
Раскрытие изобретения
На чертеже обозначены: посадочная площадка 1, вертолет 2, ультразвуковой высотомер 3, акустический приемник 4, блок обработки данных 5, передатчик 6, регулируемый фильтр 7, аналого-цифровой преобразователь (далее - АЦП) 8, блок вычисления пространственных координат 9, блок вычисления высоты 10, блок вычисления показателей отклонения высоты 11, блок выявления превышения показателей отклонения высоты 12, приемник 13, блок обработки информации и управления 14, средство отображения 15, блок хранения предельных показателей отклонения высоты 16, блок хранения предельных показателей отклонения пространственных координат 17, блок выявления превышения показателей отклонения пространственных координат 18, блок вычисления показателей отклонения пространственных координат 19.
Здесь и далее определения вертикальный, горизонтальный, верх, низ и им подобные даны в соответствии с направлением действия силы тяжести. Также формулировки "установка на земле", "расположение на земле" и им подобные без дополнительного указания подразумевают, что элементы находятся на поверхности земли, на специальной подставке на поверхности земли, в специальном корпусе или помещении на поверхности земли с обеспечением их работоспособности.
Вертолет 2 представляет собой летательный аппарат тяжелее воздуха, с вертикальным взлетом и посадкой, подъемная сила которого создается горизонтальными несущими винтами. При этом вертолет 2 может обладать любыми конструктивными особенностями. В частном случае, вместо вертолета 2 акустическая система обеспечения посадки может быть предназначена для других летательных аппаратов.
Посадочная площадка 1 (для вертолета 2) представляет собой участок земли, льда, поверхности сооружения, в том числе поверхности плавучего сооружения, либо акваторию, предназначенные для взлета, посадки или для взлета, посадки, руления и стоянки воздушных судов (согласно п. 7 статьи 40 Воздушного кодекса Российской Федерации от 19.03.1997 N 60-ФЗ). Размеры и расположение посадочной площадки 1 выбраны таким образом, чтобы обеспечить наиболее безопасную посадку вертолета 2. При этом в тексте иногда посадочная площадка 1 названа как место посадки, т.к. в рассматриваемом случае место посадки (посадочную площадку 1) обычно никак не выделяют на местности.
Основными элементами акустической системы обеспечения посадки вертолета являются несколько акустических приемников 4, блок обработки данных 5 и передатчик 6, размещенные вблизи посадочной площадки 1, и ультразвуковой высотомер 3 на вертолете 2.
Ультразвуковой высотомер 3 представляет собой устройство для определения высоты полета вертолета 2. При этом в описываемой акустической системе используют ультразвуковой высотомер 3, который определяет высоту относительно поверхности, над которой в данный момент находится вертолет 2. Ультразвуковой высотомер 3 установлен на вертолете 2 с обеспечением возможности подачи ультразвукового сигнала, направленного к поверхности земли по линии действия силы тяжести, т.е. вертикально, и возможности приема сигнала, отраженного от поверхности земли. Измерение высоты в ультразвуковом высотомере 3 основано на измерении времени между посылкой сигнала и приемом соответствующего отраженного сигнала, при этом скорость распространения сигнала является известной и постоянной для конкретных условий величиной. Ультразвуковой высотомер 3 подключен к электрической системе вертолета 2 с возможностью передачи полученных данных (т.е. измеренной высоты) на бортовую аппаратуру вертолета 2. Применение именно ультразвукового высотомера 3 обусловлено тем, что ультразвуковой высотомер 3 не подвержен метеоусловиям, так как ультразвуковой сигнал не рассеивается при дожде, снегопаде или песчаной буре. Радиовысотомеры вертолетов (которые обычно применяют как стандартные на вертолетах) имеют большую «мертвую» зону (от 5 до 8 метров) и, в зависимости от их типа, точность их измерений высоты зависит от метеоусловий. В режиме снижения радиовысотомер, начиная с высот порядка 4-5 метров, измеряет высоту со значительной погрешностью.
Акустический приемник 4 представляет собой устройство для обнаружения акустических колебаний (в данном случае от вертолета) в различных средах и измерения их параметров (Ультразвук. Маленькая энциклопедия. Глав. ред. И.П. Голямина. - М.: Советская энциклопедия, 1979, 400 с, с. 269). В системе используют как минимум четыре акустических приемника 4 (для получения трех независимых пар акустических приемников 4, и, соответственно, трех независимых временных задержек), при этом их располагают по определенной схеме. Среди всех акустических приемников 4 выбран один, относительно которого определяют расстояния до посадочной площадки и до вертолета, названный далее опорным акустическим приемником 4. В частности, три акустических приемника 4 могут быть расположены по окружности заданного радиуса, а четвертый акустический приемник 4 расположен в центре окружности (при такой схеме расположения акустический приемник 4 в центре окружности обычно является опорным акустическим приемником 4). Все акустические приемники 4 установлены на земле или специальной подставке на земле, на определенном расстоянии, отмеченном на фиг. 1 как L, от посадочной площадки 1 (но также могут быть установлены рядом с посадочной площадкой 1 без создания препятствий для посадки вертолета 2). Каждый из акустических приемников 4 соединен с блоком обработки данных 5 (а именно с основным входом соответствующего ему регулируемого фильтра 7) с возможностью передачи блоку обработки данных 5 принятых звуковых сигналов.
Блок обработки данных 5 представляет собой сложное устройство, состоящее из нескольких соединенных между собой элементов и позволяющее провести всю необходимую обработку сигналов от акустических приемников 4. В составе блока обработки данных 5 присутствуют регулируемые фильтры 7, АЦП 8, блок вычисления пространственных координат 9, блок вычисления высоты 10, блок вычисления показателей отклонения высоты 11, блок вычисления показателей отклонения пространственных координат 19, блок хранения предельных показателей отклонения высоты 16, блок хранения предельных показателей отклонения пространственных координат 17, блок выявления превышения показателей отклонения высоты 12, блок выявления превышения показателей отклонения пространственных координат 18. При этом количество регулируемых фильтров 7 и количество АЦП 8 совпадают с количеством акустических приемников 4. Каждый элемент в составе блока обработки данных 5 может быть выполнен как отдельный конструктивный элемент. Некоторые элементы в составе блока обработки данных 5 могут быть сгруппированы и представлены как единое устройство. Кроме того, блок обработки данных 5 может быть выполнен в виде компьютера с установленными программами (или одной программой), при этом каждая программа выполняет функции соответствующего элемента в составе блока обработки данных 5 (или выполняет требуемую обработку в целом). Блок обработки данных 5 расположен на земле рядом с акустическими приемниками 4 и соединен с ними и с передатчиком 6 посредством соответствующих элементов.
Регулируемый фильтр 7 представляет собой устройство, пропускающее сигналы в определенной полосе частот и ослабляющее сигналы на всех других частотах (информация о таком устройстве представлена в источнике http://techmcal_translator_dictionary.academic.ru/261078 дата обращения 23.08.2017), при этом полоса пропускаемых частот может быть изменена. Количество регулируемых фильтров 7 совпадает с количеством акустических приемников 4. Каждый из регулируемых фильтров 7 соединен с соответствующим акустическим приемником 4 посредством основного входа (основной вход предназначен для получения тех сигналов, которые необходимо передать далее после фильтрации) с возможностью приема от него сигнала и соединен своим выходом с соответствующим АЦП 8 с возможностью передачи ему отфильтрованного сигнала. Также регулируемые фильтры 7 соединены посредством управляющего входа (управляющий вход предназначен для получения информации, которая определяет, каким образом сигналы будут отфильтрованы или как изменяется полоса пропускания регулируемого фильтра 7) с блоком выявления превышения показателей отклонения пространственных координат 18, по управляющему сигналу от которого полоса пропускаемых частот у регулируемых фильтров 7 может быть изменена.
АЦП 8 представляет собой устройство для автоматического преобразования аналоговых сигналов в эквивалентные им дискретные сигналы, представленные цифровым кодом. Количество АЦП 8 совпадает с количеством акустических приемников 4. Каждый АЦП 8 соединен своим входом с выходом соответствующего регулируемого фильтра 7 с возможностью приема от него отфильтрованного сигнала и соединен своим выходом со входом блока вычисления высоты 10 и со входом блока вычисления пространственных координат 9 с возможностью передачи им преобразованного сигнала.
Блок вычисления высоты 10 представляет собой элемент, предназначенный для вычисления по полученным преобразованным сигналам высоты полета вертолета 2. Блок вычисления пространственных координат 9 представляет собой элемент, предназначенный для вычисления по полученным преобразованным сигналам пространственных координат, а именно горизонтальных координат и наклонной дальности, отмеченной на фиг. 1 как R(t) (в соответствии с источником http://normative_reference_dictionary.academic.ru/38353/наклонная_дальность, дата обращения 23.08.2017, наклонная дальность в рассматриваемом случае - это расстояние от вертолета до точки установки опорного акустического приемника). Среди определяемых величин, т.е. высоты, горизонтальных координат и наклонной дальности, только три величины являются независимыми, поэтому для их определения достаточно трех уравнений. При этом конечным результатом вычисления двух указанных блоков являются величины относительно посадочной площадки 1 (обычно точки в центре посадочной площадки 1). Блок вычисления высоты 10 соединен своим выходом со входом блока вычисления показателей отклонения высоты 11 и со входом передатчика 6 с возможностью передачи им значения высоты на вертолет 2. Блок вычисления пространственных координат 9 соединен своим выходом со входом блока вычисления показателей отклонения пространственных координат 19 и со входом передатчика 6 с возможностью передачи им значений пространственных координат на вертолет 1.
Блок вычисления показателей отклонения высоты 11 представляет собой элемент, предназначенный для вычисления показателей или показателя отклонений высоты на основе значений высоты, полученных за определенный интервал времени от блока вычисления высоты 10. Блок вычисления показателей отклонения пространственных координат 19 представляет собой элемент, предназначенный для вычисления показателей отклонений пространственных координат на основе значений пространственных координат, полученных за определенный интервал времени от блока вычисления пространственных координат 9. При этом в качестве показателей отклонений величин могут быть использованы среднеквадратичное отклонение, среднее линейное отклонение или/и дисперсия. Блок вычисления показателей отклонения высоты 11 соединен своим выходом с первым входом блока выявления превышения показателей отклонения высоты 12 с возможностью передачи ему вычисленного значения показателей отклонения высоты. Блок вычисления показателей отклонения пространственных координат 19 соединен своим выходом с первым входом блока выявления превышения показателей отклонения пространственных координат 18 с возможностью передачи ему вычисленных значений показателей отклонения пространственных координат.
Блок выявления превышения показателей отклонения высоты 12 представляет собой элемент, предназначенный для выявления такой ситуации, когда вычисленное значение показателей отклонения высоты становится больше предельного значения какого-либо или нескольких показателей отклонения высоты. Блок выявления превышения показателей отклонения высоты 12 соединен своим вторым входом с выходом блока хранения предельных показателей отклонения высоты 16 с возможностью получения от него предельного значения показателей отклонения высоты, а также своим выходом со входом передатчика 6 с возможностью передачи ему управляющего сигнала для включения ультразвукового высотомера 3 в случае, когда вычисленное значение показателей отклонения высоты больше предельного значения показателей отклонения высоты.
Блок выявления превышения показателей отклонения пространственных координат 18 представляет собой элемент, предназначенный для выявления такой ситуации, когда вычисленные значения показателей отклонения пространственных координат становятся больше соответствующих предельных значений показателей отклонения пространственных координат. Блок выявления превышения показателей отклонения пространственных координат 18 соединен своим вторым входом с выходом блока хранения предельных показателей отклонения пространственных координат 17 с возможностью получения от него предельных значений показателей отклонения пространственных координат, а также своим выходом с управляющими входами регулируемых фильтров 7 с возможностью передачи им управляющего сигнала в случае, когда вычисленные значения показателей отклонения пространственных координат больше соответствующих предельных значений показателей отклонения пространственных координат.
Блок хранения предельных показателей отклонения высоты 16 и блок хранения предельных показателей отклонения пространственных координат 17 предназначены для хранения соответственно предельного значения показателей отклонения высоты и предельных значений показателей отклонения пространственных координат. При этом указанные предельные значения показателей отклонений величин загружают в указанные блоки как постоянные величины извне, а конкретные их значения получают, например, путем предварительной обработки экспериментальных данных.
Кроме того, в составе блока обработки данных 5 могут быть дополнительно присутствовать каналы измерения скорости ветра и температуры. Эти данные учитывают при проведении вычислений в блоке вычисления пространственных координат 9 и блоке вычисления высоты 10, т.к. они влияют на величину скорости звука.
Передатчик 6 представляет собой устройство для передачи сигналов посредством электромагнитного излучения, например, радиоволн, от блока обработки данных 5 к электрической системе вертолета 2 (вертолет оснащен оборудованием, позволяющим принять и обработать такие сигналы). Передатчик 6 предназначен для передачи информации о высоте и пространственных координатах относительно посадочной площадки 1 на бортовую аппаратуру вертолета 2, а также передачи управляющего сигнала, обеспечивающего включение ультразвукового высотомера 3 и измерение с его помощью высоты.
Вертолет 2 оснащен оборудованием, позволяющим принять и обработать сигналы от передатчика 6, а также от ультразвукового высотомера 3. В частности, на вертолете 2 установлены приемник 13, блок обработки информации и управления 14, средство отображения 15, иногда вместе называемые в тексте как бортовая аппаратура.
Приемник 13 представляет собой устройство, обеспечивающее прием сигнала (радиосигнала) от передатчика 6, и соединен со входом блока обработки информации и управления 14 с возможностью передачи ему принятого сигнала.
Блок обработки информации и управления 14 представляет собой устройство, позволяющее в том числе преобразовывать получаемые от приемника 13 и ультразвукового высотомера 3 сигналы в необходимую форму и направлять их к соответствующему оборудованию на вертолете 2, а также обеспечивать, в случае необходимости, автоматическое включение ультразвукового высотомера 3. При этом блок обработки информации и управления 14 соединен с ультразвуковым высотомером 3 и соединен своим выходом со входом средства отображения 15.
Средство отображения 15 представляет собой устройство, предназначенное для вывода горизонтальных координат, наклонной дальности и высоты относительно посадочной площадки 1, измеренных при помощи акустических приемников 4, и высоты, измеренной при помощи ультразвукового высотомера 3, в таком виде, в котором эту информацию может воспринять пилот вертолета. В частном случае, средство отображения 15 может представлять собой монитор.
Осуществление изобретения
В случае использования указанных выше элементов и средств, изобретение реализуется следующим образом. Все элементы акустической системы обеспечения посадки являются стандартными, известными и не требуют специального изготовления (соответствующие примеры представлены в источниках http://www.intuit.ru/studies/courses/590/446/lecture/9920?page=2, http://ra3ggi.qrz.ru/UZLY/r230682.htm, дата обращения 23.08.2017). Все элементы блока обработки данных 5 собирают в необходимой конфигурации, как это описано выше.
Предварительно определяют расположение посадочной площадки 1. Акустические приемники 4 располагают на земле на расстоянии от посадочной площадки 1 по определенной схеме, зафиксировав в блоке обработки данных 5 при этом все параметры их взаимного положения и выбрав опорный акустический приемник 4. Измеряют и заносят в блок обработки данных 5 информацию о положении опорного акустического приемника 4 относительно посадочной площадки 1 (например, ее центра). Также в блок обработки данных 5 заносят информацию о предельных значениях показателей отклонений величин. Блок обработки данных 5 и передатчик 6 располагают на земле вблизи акустических приемников 4, при этом акустические приемники 4 соединяют с блоком обработки данных 5, а блок обработки данных 5 с передатчиком 6 (соединение может быть выполнено, например, с помощью проводов). Вертолет 2 оснащают ультразвуковым высотометром 3 и дополнительным оборудованием, позволяющим принимать и обрабатывать сигналы, полученные от передатчика.
Акустическую систему используют следующим образом. При приближении вертолета 2 к посадочной площадке 1 каждый акустический приемник 4 принимает звуковой сигнал, генерируемый вертолетом 2 (в частности, винтом и двигателем). От каждого из акустических приемников 4 сигнал передают на соответствующий регулируемый фильтр 7, при этом в начальный момент времени (когда акустическую систему только начали использовать) регулируемые фильтры 7 пропускают далее на АЦП 8 все частоты принимаемого звукового сигнала. После преобразования сигналов в АЦП 8 в блоке вычисления пространственных координат 9 и блоке вычисления высоты 10 вычисляют высоту, горизонтальные координаты и наклонную дальность относительно центра посадочной площадки 1. Для этого определяют три временные задержки между принятыми акустическими приемниками 4 звуковыми сигналами (временные задержки определяют путем оценки времен сдвигов функций взаимной корреляции между сигналами), например, между каждым из трех акустических приемников 4 на окружности и опорными акустическим приемником 4 в центре. С учетом схемы расположения акустических приемников 4 по временным задержкам определяют три независимых координаты вертолета 2 относительно опорного акустического приемника 4 (например, горизонтальные координаты и наклонную дальность, а высоту вычисляют через соотношение найденных независимых координат). Затем с учетом расположения опорного акустического приемника 4 относительно посадочной площадки 1 вычисляют высоту, горизонтальные координаты и наклонную дальность относительно центра посадочной площадки 1.
Пример вычисления приведен для случая, когда три акустических приемника 4 расположены равномерно на окружности с радиусом а, а опорный акустический приемник 4 - в центре окружности. Модель сигнала Sk (t) в k-ом акустическом приемнике 4 запишем в виде:
Sk(t)=1/RkS(t-R/C)+n(t),
где S(t) - полезный сигнал, излучаемый вертолетом 2, n(t) - независимый аддитивный шум, Rk - длина k-го луча, определяющая ослабление сигнала в однородной среде за счет сферического расхождения, R/C - время распространения сигнала со скоростью С.
Пусть в декартовой системе координат положение вертолета 2 в пространстве определено вектором  , а положение акустических приемников 4 - векторами в плоскости XY:
, а положение акустических приемников 4 - векторами в плоскости XY:
 , k=1,2,3 (1, здесь и далее цифра в скобках означает номер используемой формулы),
, k=1,2,3 (1, здесь и далее цифра в скобках означает номер используемой формулы),
где ϕk - угол, который составляет вектор  с положительным направлением оси ОХ, и пусть для определенности первый акустический приемник 4 расположен на оси OY, т.е.:
с положительным направлением оси ОХ, и пусть для определенности первый акустический приемник 4 расположен на оси OY, т.е.:

Введем следующие обозначения:
где R - длина опорного луча, Rk - длина луча, приходящего в k-й акустический приемник 4, dk - разность хода лучей. После простых алгебраических преобразований из (3) можно получить следующую систему трех линейных уравнений относительно трех независимых переменных R, X, Y, полностью определяющих положение вертолета 2

Можно показать, что определитель системы

где D=d1+d2+d3 - сумма всех разностей хода, и Det всегда положителен,
0<D≤3a и система уравнений (4) всегда имеет однозначное решение:
Принципиально алгоритм измерения координат включает в себя следующую последовательность операций: измерение времен запаздываний (задержек) τk (k=1, 2, 3) сигналов, принятых периферийными акустическими приемниками 4 по отношению к опорному акустическому приемнику 4, вычисление разностей хода лучей dk=С τk, расчет координат по формулам (5).
Текущие координаты вертолета 2 (формулы (5)) определены относительно опорного акустического приемника 4. Для пилота важны его текущие координаты относительно посадочной площадки 1. Поэтому в системе производят пересчет координат относительно центра посадочной площадки 1. Горизонтальное расстояние от центра посадочной площадки 1 до опорного акустического приемника 4 равно L, а текущую наклонную дальность от вертолета 2 до центра посадочной площадки 1 обозначим через S(t). Также учтем, что опорный акустический приемник 4 может находиться на некоторой высоте от уровня земли ho.
Тогда истинная наклонная дальность S(t) и истинная высота H(t) определяются по формулам:

Где α - текущий угол места, оцениваемый по значениям измеряемых текущих координат, у, z, см. формулы (5).
После проведения вычислений из блока вычисления пространственных наклонной дальности относительно центра посадочной площадки 1. После приема приемником 13 на вертолете и необходимой обработки этого сигнала при помощи блока обработки информации и управления 14 на вертолете 2 информацию высоте, горизонтальных координатах и наклонной дальности относительно центра посадочной площадки выводят на средство отображения 15 вертолета 2.
Одновременно с передачей сигнала через передатчик 6 из блока вычисления пространственных координат 9 к блоку вычисления показателей отклонения пространственных координат 19 передают сигнал, содержащий информацию о вычисленных пространственных координатах, а из блока вычисления высоты 10 к блоку вычисления показателей отклонения высоты 11 передают сигнал, содержащий информацию о вычисленной высоте. В блоке вычисления показателей отклонения пространственных координат 19 и блоке вычисления показателей отклонения высоты 11 производят расчет показателя отклонения (например, среднеквадратичного отклонения) соответственно для пространственных координат и высоты. При этом расчете используют данные ряда значений каждой величины (пространственных координат или высоты) за определенный период времени до момента текущего вычисления.
Затем из блока вычисления показателей отклонения пространственных координат 19 в блок выявления превышения показателей отклонения пространственных координат 18 передают сигнал, содержащий информацию соответственно о показателях отклонения пространственных координат. В блоке выявления превышения показателей отклонения пространственных координат 18 сравнивают значения вычисленных показателей отклонения пространственных координат со значениями предельных показателей отклонения пространственных координат, которые получают из блока хранения предельных показателей отклонения пространственных координат 17. В случае, если значения вычисленных показателей отклонения пространственных координат больше значений предельных показателей отклонения пространственных координат, к регулируемым фильтрам 7 направляют сигнал, обеспечивающий сдвиг вверх нижней границы полосы пропускаемых частот. Т.е. низкие частоты звуковых сигналов, принятых акустическими приемниками 4, для дальнейших операций в блоке обработки данных 5 не используют. Необходимость сдвига нижней границы полосы пропускаемых частот объясняется следующим образом. Ситуация, когда значения вычисленных показателей отклонения пространственных координат больше значений предельных показателей отклонения пространственных координат, говорит о том, что вертолет 2 перестал быть относительно акустических приемников 4 точечным источником шума и определение его положения возможно только со значительными погрешностями. Это обычно происходит при выравнивании вертолета 2 и его снижении до высот 200-150 метров, когда вертолет 2 уже заходит на посадку. Сдвиг нижней границы полосы пропускаемых частот регулируемых фильтров 7 приводит к тому, что для определения пространственных координат и высоты используют только звуковой сигнал от двигателя вертолета 2, который можно считать точечным источником шума за счет небольших размеров. Переход на использование только звукового сигнала от двигателя вертолета 2 происходит при нижней границе полосы пропускаемых частот, равной приблизительно 500 Гц.
В то же время из блока вычисления показателей отклонения высоты 11 в блок выявления превышения показателей отклонения высоты 12 передают сигнал, содержащий информацию соответственно о показателях отклонения высоты. В блоке выявления превышения показателей отклонения высоты 12 сравнивают значения вычисленных показателей отклонения высоты со значениями предельных показателей отклонения высоты, которые получают из блока хранения предельных показателей отклонения высоты 16. В случае, если значения вычисленных показателей отклонения высоты больше значений предельных показателей отклонения высоты (т.е. использование для вычисления высоты данных от акустических приемников 4 приводит к большой погрешности), через передатчик 6 на вертолет 2 передают сигнал, обеспечивающий включение ультразвукового высотомера 3 и измерение высоты уже с его помощью. Сигнал от передатчика 6 принимает приемник 13 и передает его блоку обработки информации и управления 14, который в свою очередь направляет ультразвуковому высотомеру 3 управляющий сигнал, обеспечивающий включение ультразвукового высотомера 3. Ультразвуковой высотомер 3 излучает сигнал (например, ультразвуковые импульсы), принимает отраженный сигнал, при этом измеряя время между излучением и приемом сигнала. С учетом измеренного времени и известной скорости распространения сигнала вычисляют высоту полета вертолета 2. Сигнал, содержащий информацию о вычисленной ультразвуковым высотомером 3 высоте полета, обрабатывают при помощи блока обработки информации и управления 14 и выводят на средство отображения 15.
При этом можно учесть влияние ТСС. В отсутствие потока воздуха под вертолетом 2 время, необходимое для падения и возврата сигнала от ультразвукового высотомера 3 составляет
 ,
,
где L - высота расположения датчика, с - скорость звука.
При наличии однородного потока со скоростью V, направленного к поверхности Земли, время необходимое для падения и возврата сигнала от ультразвукового высотомера 3 составляет:
 ,
,
Легко показать, что отношение времен не зависит от L и составляет
 ,
,
где М - число Маха. Таким образом, систематическая ошибка, связанная с наличием потока, немного завышает измеряемую высоту (Δt1<Δt2).
Для типичных данных L=15 метров, V=3 м/с - ошибка измерения времени (и, соответственно, высоты) не превышает М2≤0,001 или в абсолютных величинах не более 0.015 метра. Неоднородность потока (уменьшение скорости потока с удалением от днища) только уменьшит ошибку, и она может быть скорректирована аппаратно.
Описанные выше операции по приему звуковых сигналов от вертолета 2 акустическими датчиками 4 и по их обработке в блоке обработки данных 5 (в том числе определение показателей отклонения величин и сдвиг нижней границы полосы пропускаемых частот регулируемых фильтров 7), а также передача вычисленных пространственных координат и высоты на бортовую аппаратуру вертолета 2 постоянно повторяют. Это необходимо для того, чтобы обеспечить постоянное наличие на бортовой аппаратуре вертолета 2 актуальной информации о его положении.
Таким образом, наличие в составе акустической системы ультразвукового высотомера 3 и регулируемых фильтров 7, а также блока вычисления показателей отклонения высоты 11, блока вычисления показателей отклонения пространственных координат 19, блока хранения предельных показателей отклонения высоты 16, блока хранения предельных показателей отклонения пространственных координат 17, блока выявления превышения показателей отклонения высоты 12, блока выявления превышения показателей отклонения пространственных координат 18 (т.е. элементов, обеспечивающих регулировку регулируемых фильтров 7) обеспечивает повышение безопасности всего этапа посадки вертолета 2. Безопасность посадки напрямую зависит от точности определения положения вертолета 2 относительно посадочной площадки 1. Причины более точного определения положения вертолета 2 заключаются в следующем. При приближении вертолета 2 к посадочной площадке 1 считать вертолет 2 точечным источником шума невозможно из-за увеличения погрешности вычислений. Использование регулируемых фильтров 7, которые позволяют учитывать при расчетах не все частоты звуковых сигналов от вертолета 2, включая дискретный низкочастотный шум несущего винта, а только частоты звуковых сигналов со сплошным спектром, включая шумы двигателя, что позволяет считать вертолет 2 точечным источником шума даже при приближении к посадочной площадке 1. Кроме того, ультразвуковой высотомер 3 позволяет с высокой точностью определять высоту вне зависимости от погодных условий и мешающих факторов, в отличие от стандартного радиовысотомера.
Способ контроля перемешивания среды в виде сырой нефти в резервуаре и устройство для его осуществления
Способ определения объема шламовых отложений в резервуарах с сырой нефтью и устройство для его реализации
Оптоволоконный интерферометрический датчик статического и динамического давления
Способ, устройство и система ультразвуковой визуализации структур мозга через толстые кости черепа
Устройство ультразвуковой визуализации объектов в жидких средах (варианты)
Акустический профилограф для получения изображения поверхности дна (варианты)
Способ и устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах
Способ контроля перемешивания среды в виде сырой нефти в резервуаре и устройство для его осуществления
Способ определения объема шламовых отложений в резервуарах с сырой нефтью и устройство для его реализации
Оптоволоконный интерферометрический датчик статического и динамического давления
Способ, устройство и система ультразвуковой визуализации структур мозга через толстые кости черепа
Устройство ультразвуковой визуализации объектов в жидких средах (варианты)
Акустический профилограф для получения изображения поверхности дна (варианты)
Способ и устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах

