Результат интеллектуальной деятельности: ОПРЕДЕЛЕНИЕ КУРСА ДЛЯ ГИБРИДНОГО НАВИГАЦИОННОГО РЕШЕНИЯ НА ОСНОВЕ МАГНИТНО-ОТКАЛИБРОВАННЫХ ИЗМЕРЕНИЙ
Вид РИД
Изобретение
Финансирование из федерального бюджета
Настоящее изобретение было выполнено с поддержкой Правительства по правительственному контракту №013ТА03030674, заключенному с компанией Technology Agency, Чешская Республика. Правительство имеет определенные права на настоящее изобретение.
Уровень техники
В интегрированных навигационных системах, основанных на недорогих инерциальных датчиках (как правило, микроэлектромеханических датчиках), часто прибегают к помощи магнитометра для оценивания курса во время фаз полета без ускорения. Поскольку обеспечение надежности такой помощи является сложной задачей, в современных системах применяют измерения магнитометра только тогда, когда существует необходимость в такой помощи, и только в отношении курса, а не крена или тангажа. С целью обеспечения того, что измерения магнитометра не используются для крена и тангажа, в современных системах, как правило, не используют трехмерные магнитные векторы для указанной помощи.
Сущность изобретения
Один вариант осуществления относится к способу определению курса для гибридной навигационной системы при помощи магнитометра. Указанный способ включает: прием сигналов от множества спутников глобальной навигационной спутниковой системы (ГНСС) в местоположении, соответствующем объекту; получение трехмерных инерциальных измерений от одного или нескольких инерциальных датчиков, соответствующих объекту; и получение трехмерных магнитных измерений от одного или нескольких магнитометров, соответствующих объекту. Затем оценивают состояния магнитного смещения для трехмерных магнитных измерений при помощи фильтра калибровки магнитных измерений с использованием трехмерных инерциальных измерений, данных из сигналов от множества спутников ГНСС и трехмерных магнитных измерений. После чего выполняют расчет искусственного курса для объекта с использованием состояний магнитного смещения. Основное навигационное решение для объекта может быть оценено при помощи основного навигационного фильтра с использованием трехмерных инерциальных измерений, данных из сигналов от множества спутников ГНСС и искусственного курса.
Краткое описание чертежей
Описанные ниже иллюстративные фигуры предназначены для помощи в понимании описания иллюстративных вариантов осуществления и не должны рассматриваться в качестве ограничения.
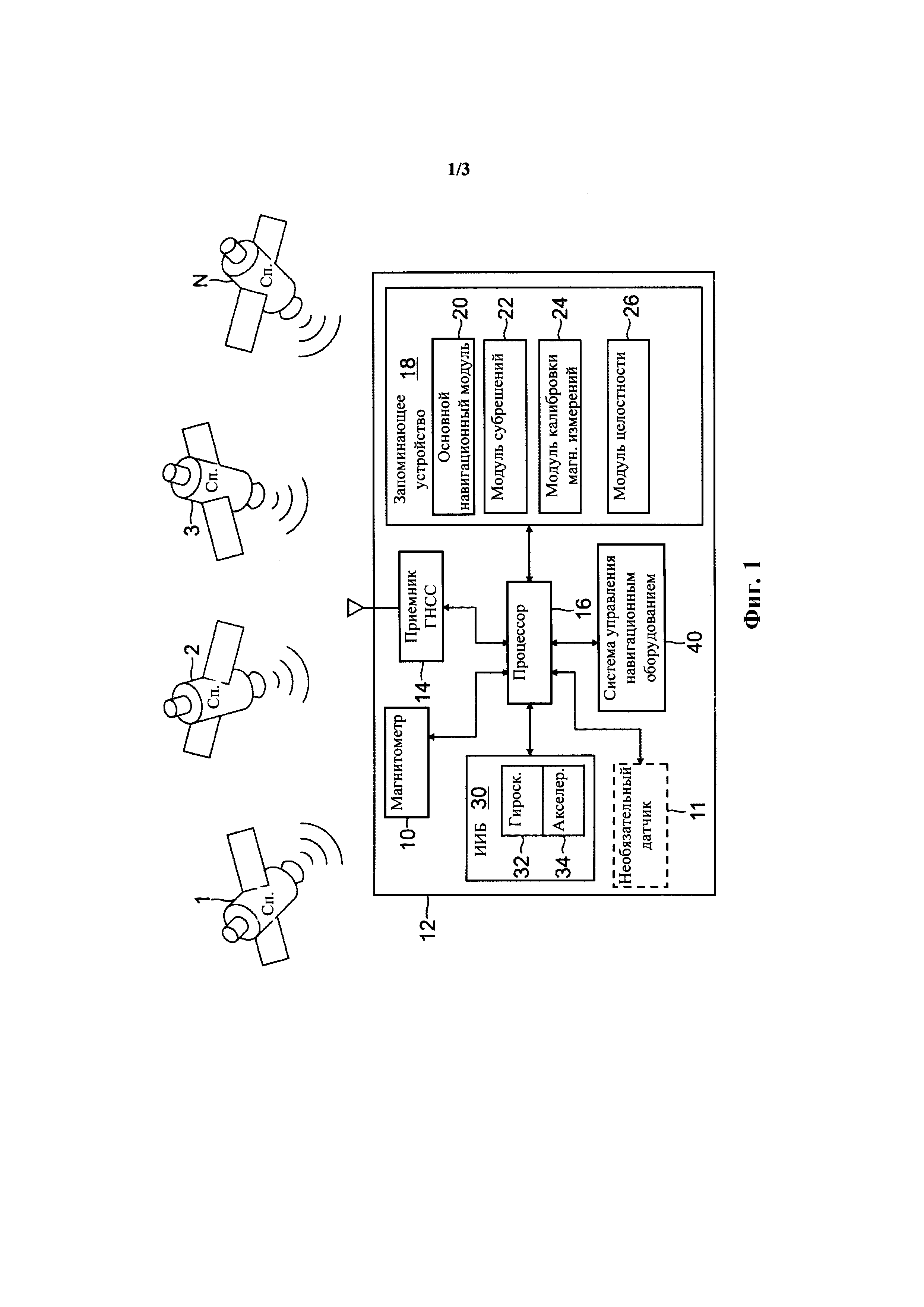
На фиг. 1 представлен иллюстративный вариант осуществления системы, содержащей объект с гибридной навигационной системой, которая сконфигурирована с возможностью предоставления курса для объекта на основе магнитно откалиброванных измерений.
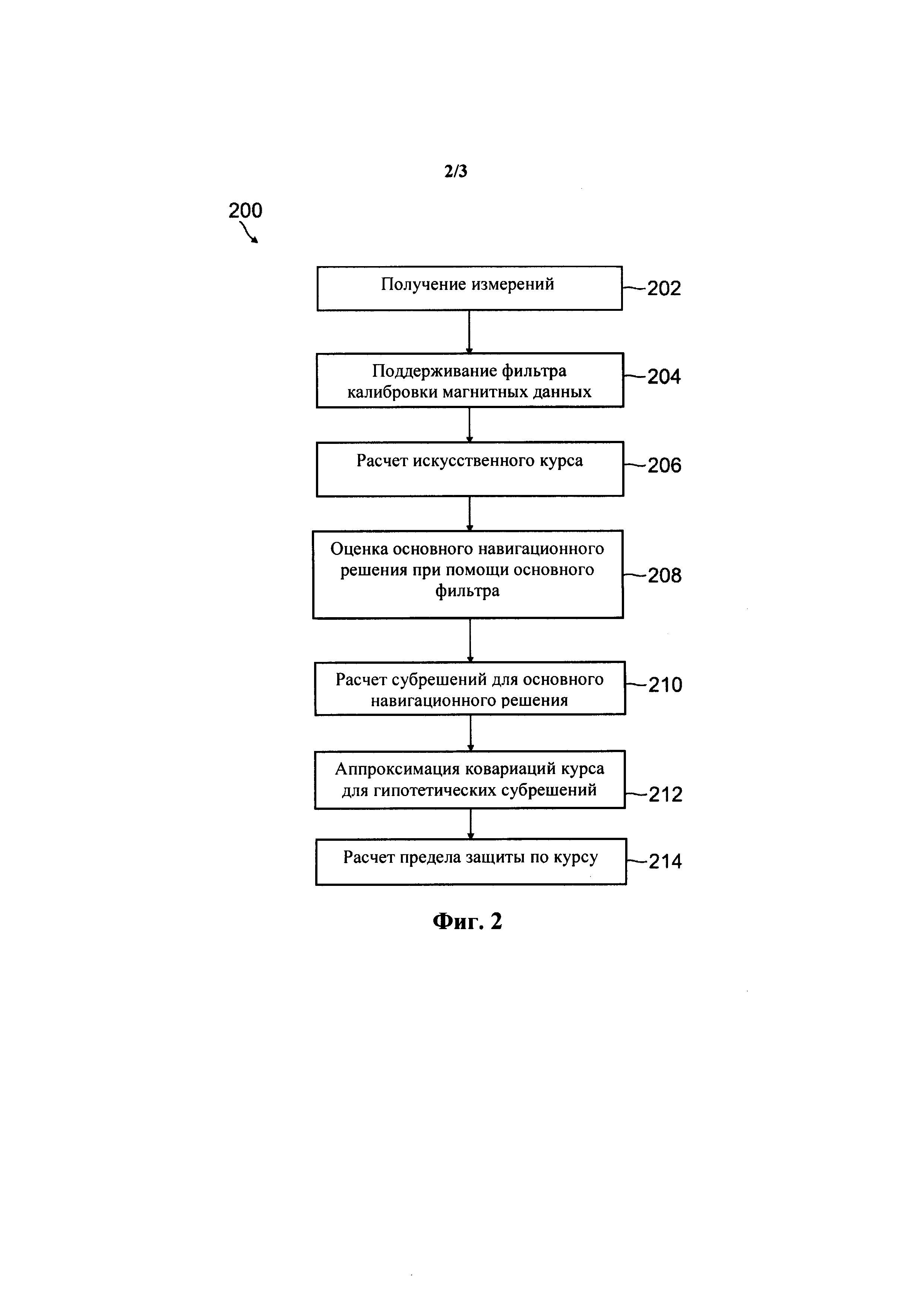
На фиг. 2 представлена блок-схема, иллюстрирующая один вариант осуществления способа определения курса для объекта, изображенного на фиг. 1, а также для определения предела защиты по курсу.
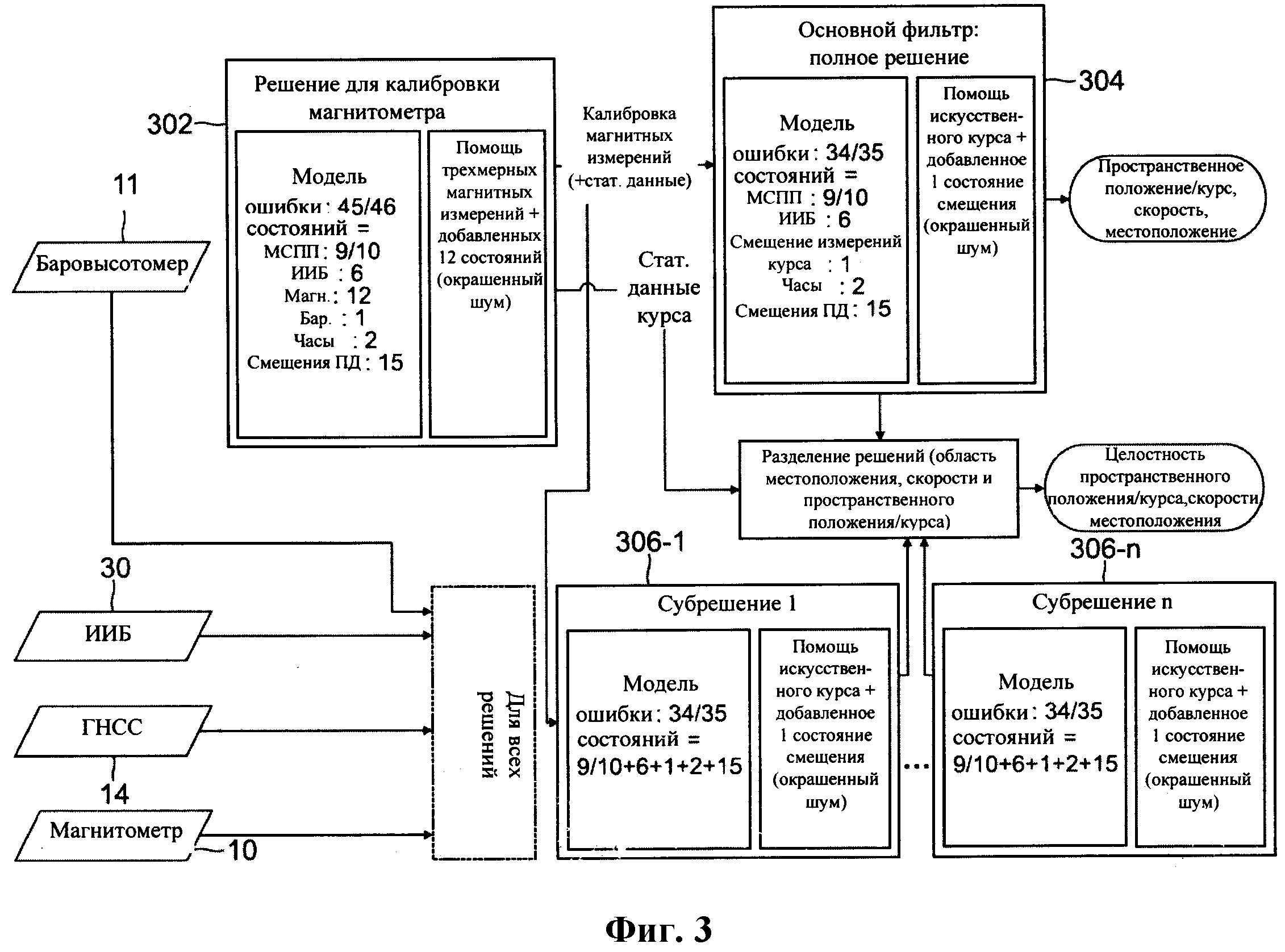
На фиг. 3 представлен иллюстративный вариант осуществления множества фильтров, поддерживаемых с целью определения навигационного решения, включая курс, а также соответствующих пределов защиты, включая предел защиты по курсу, при помощи способа, изображенного на фиг. 2.
В соответствии с общепринятой практикой различные описанные элементы необязательно изображены с соблюдением масштаба, при этом они изображены таким образом, чтобы выделить определенные элементы (признаки), относящиеся к иллюстративным вариантам осуществления.
Подробное описание изобретения
Отсутствие использования помощи на основе трехмерных магнитных векторов препятствует полной калибровке магнитометра в режиме реального времени, которая включает идентификацию обоих параметров калибровки магнитометра: смещений (ошибок) от мягкого железа и твердого железа. Такая калибровка магнитометра может значительно улучшить точность оценки курса, что обычно является «узким местом» конструкции интегрированной навигационной системы или системы определения курса и углового пространственного положения (AHRS) в связи с жесткими требованиями к точности определения курса.
Описанные в настоящем документе варианты осуществления предоставляют решение для курса на основе трехмерных измерений магнитометра с надлежащим моделированием и обработкой ошибок в измерениях магнитометра, при этом трехмерные измерения магнитометра не влияют на решения для крена и тангажа. Описанные в настоящем документе варианты осуществления также предоставляют целостность сигнала глобальной навигационной спутниковой системы (ГНСС) в пространстве для навигационных параметров, включая курс, на основе разделения решений без значительного увеличения вычислительных мощностей.
На фиг. 1 представлен один иллюстративный вариант осуществления объекта 12 с одним или несколькими инерциальными измерительными блоками (ИИБ) 30, включающими один или несколько гироскопов 32 и акселерометров 34. Объект 12 также содержит один или несколько приемников 14 ГНСС, которые принимают сигналы от множества спутников 1-N. Объект 12 также содержит один или несколько магнитометров 10. Кроме того, объект 12 может необязательно содержать один или несколько других датчиков 11, таких как один или несколько барометров. Объект 12 дополнительно содержит одно или несколько обрабатывающих устройств 16, связанных с одним или несколькими блоками 18 запоминающего устройства, в которых хранятся инструкции (например, программное обеспечение), а также данные, полученные от приемника (приемников) 14 ГНСС, магнитометра (магнитометров) 10, одного или нескольких ИИБ 30 и другого необязательного датчика (датчиков) 11. Инструкции сконфигурированы таким образом, чтобы, при выполнении указанных инструкций обрабатывающим устройством (обрабатывающими устройствами) 16, указанные устройства осуществляли определение гибридного навигационного решения для объекта 12 на основе данных из приемника (приемников) 14 ГНСС, магнитометра (магнитометров) 10 и одного или нескольких ИИБ 30. Инструкции, хранящиеся в запоминающем устройстве 18, могут содержать модуль 20 основного навигационного фильтра, модуль 22 субрешений, модуль 24 фильтра калибровки магнитных измерений и модуль 26 целостности навигационного решения, которые сконфигурированы таким образом, чтобы реализовать свои функции на обрабатывающем устройстве (обрабатывающих устройствах) 16. Следует понимать, что разделение описанных в настоящем документе модулей 20, 22, 24, 26 приведено лишь в качестве примера, и другие примеры могут содержать большее или меньшее количество модулей и/или другие модули, при этом действия, закрепленные за определенным модулем, могут отличаться. Объект 12 может включать любой объект, для которого необходимо выполнить определение навигационного решения, такой как пилотируемое или беспилотное транспортное средство (например, воздушное судно, корабль, автомобиль).
Навигационное решение, определенное обрабатывающим устройством (обрабатывающими устройствами) 16, может быть направлено в систему 40 управления навигационным оборудованием, которая содержит другое обрабатывающее устройства (обрабатывающие устройства), для обеспечения контроля навигационного оборудования и подачи команд различным блокам, например, датчику (датчикам) 30, приемнику (приемникам) 14 ГНСС и обрабатывающему устройству (обрабатывающим устройства) 16. В случае пилотируемого воздушного судна система 40 управления навигационным оборудованием может быть системой управления полетом, которая обменивается данными с пилотом и наземной станцией управления при помощи экранного монитора или принтеров. Согласно другому варианту осуществления обрабатывающее устройство (обрабатывающие устройства) 16 и система 40 управления навигационным оборудованием могут быть объединены в один блок. Система 40 управления навигационным оборудованием может быть реализована при помощи любого подходящего обрабатывающего устройства (обрабатывающих устройств) и технологии отображения, например, при помощи, кроме прочего, принтеров, экранов вычислительных машин, различных блоков дисплеев на основе электроннолучевых трубок, жидкокристаллических дисплеев на активной и пассивной матрице, а также плазменных панелей. Обрабатывающее устройство (обрабатывающие устройства) 16 и обрабатывающее устройство (обрабатывающие устройства) в системе 40 управления навигационным оборудованием могут включать любое подходящее обрабатывающее устройство (обрабатывающие устройства), например, устройство цифровой обработки сигналов (УЦОС), центральный процессор (ЦП), микроконтроллер или арифметическое логическое устройство. Запоминающее устройство 18 может включать любое подходящее устройство для хранения данных, такое как флэш-накопитель, накопитель на магнитных дисках, запоминающее устройство с произвольной выборкой (например, динамическое запоминающее устройство с произвольной выборкой), постоянное запоминающее устройство, программируемое постоянное запоминающее устройство, диски CD/DVD/Blu-ray, оптическое запоминающее устройство или оптоэлектронные схемы.
Один или несколько ИИБ 30, приемник (приемники) 14 ГНСС, магнитометр (магнитометры) 10 и другой необязательный датчик (датчики) 11 могут быть физически прикреплены к объекту 12 таким образом, чтобы выдаваемые ими измерения соответствовали объекту 12. Следовательно, один или несколько ИИБ 30 могут быть сконфигурированы для измерения инерциального перемещения объекта 12 относительно трех взаимно ортогональных осей, чтобы получить трехмерные инерциальные измерения, соответствующие объекту 12. Приемник (приемники) 14 ГНСС может быть сконфигурирован для получения сигналов в местоположении объекта 12 от спутников 1-N ГНСС, а также для предоставления измерений псевдодальности для обрабатывающего устройства (обрабатывающих устройств) 16 на основе принятых сигналов. К примерам группировок спутников ГНСС относятся группировки системы глобального позиционирования (GPS), ГЛОНАСС, Галилео и Бейдоу. Магнитометр (магнитометры) 10 может быть сконфигурирован для обнаружения магнитного поля Земли в трех взаимно ортогональных направлениях в местоположении объекта 12, чтобы получить трехмерные магнитные измерения, соответствующие объекту 12. К необязательному датчику (датчикам) 11 относятся один или несколько барометров, сконфигурированных для измерения барометрического давления в местоположении указанного объекта, чтобы получить барометрические измерения, соответствующие указанному объекту.
На фиг. 2 изображен один вариант осуществления способа 200 определения навигационного решения при помощи системы, описанной со ссылками на фиг. 1. Сигналы от множества спутников ГНСС принимают в местоположении объекта 12 при помощи приемника (приемников) 14 ГНСС. Затем приемник (приемники) 14 ГНСС может на основе принятых сигналов генерировать измерения псведодальностей (блок 202). Трехмерные инерциальные измерения, соответствующие объекту 12, получают при помощи одного или нескольких ИИБ 30 (блок 202). Трехмерные магнитные измерения, соответствующие объекту 12, получают при помощи магнитометра (магнитометров) 10 (блок 202). В случае наличия любого необязательного датчика (датчиков) 11 (например, одного или нескольких барометров), указанный датчик также может выдать данные измерений, соответствующие объекту 12 (например, барометрические измерений). Измерения псевдодальностей, трехмерные инерциальные измерения, трехмерные магнитные измерения и измерения от другого необязательного датчика (датчиков) 11 (например, барометрические измерения), в случае их наличия, направляют в обрабатывающее устройство (обрабатывающие устройства) 16.
Обрабатывающее устройство (обрабатывающие устройства) 16 могут выполнять инструкции, хранящиеся в запоминающем устройстве 18, для осуществления следующих действий на основе измерений псевдодальностей, трехмерных инерциальных оценок, трехмерных магнитных измерений и барометрических измерений (в случае их наличия). Инструкции, хранящиеся в запоминающем устройстве 18, включают модуль 24 фильтра калибровки магнитных измерений, благодаря чему обрабатывающее устройство (обрабатывающие устройства) 16 поддерживает фильтр калибровки магнитных измерений (блок 204), как описано ниже, на основе измерений псевдодальностей, трехмерных инерциальных измерений, трехмерных магнитных измерений и измерений от необязательного датчика (датчиков) 11 (в случае их наличия).
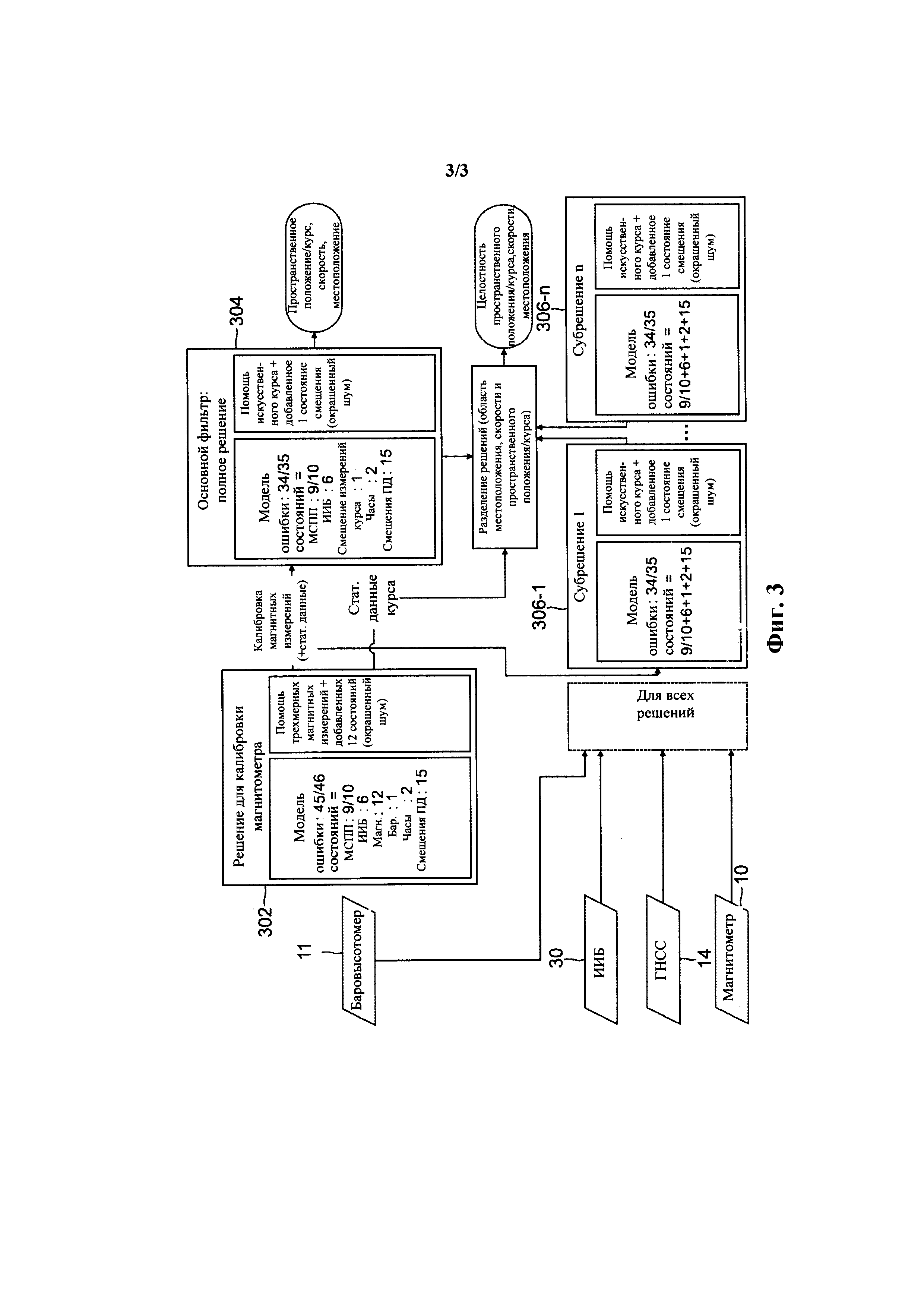
На фиг. 3 представлена блок-схема, иллюстрирующая фильтр 302 калибровки магнитных измерений, другие фильтры, реализованные обрабатывающим устройством (устройствами) 16, и взаимодействие между фильтрами и с одним или несколькими ИИБ 30, приемником (приемниками) 14 ГНСС, магнитометром (магнитометрами) 10 и необязательным датчиком 11 (например, барометром). Фильтр 302 калибровки магнитных измерений (также именуемый в настоящем документе «фильтром 302 калибровки») сконфигурирован для оценки компонентов вектора состояния, соответствующего объекту 12, и может быть основан на алгоритме оценки в соответствии с подходом к проектированию фильтра Кальмана. Компоненты вектора состояния могут включать состояния для местоположения, скорости, крена, тангажа и курса объекта 12. Согласно одному примеру эти состояния включают девять или десять состояний для трехмерного местоположения и скорости, а также крена, тангажа и курса объекта 12. Компоненты вектора состояния могут включать состояния для калибровки трехмерных инерциальных измерений. Согласно одному примеру эти состояния включают шесть состояний для калибровки трехмерного ускорения и угловой скорости. Компоненты вектора состояния могут включать состояния для смещения или дрейфа часов приемника (приемников) 14 ГНСС, а также состояния для смещений псевдодальностей сигналов, принятых приемником (приемниками) 14 ГНСС. Согласно примерам, в которых получают барометрические измерения или в которых присутствуют таковые измерения, фильтр 302 калибровки может также оценивать состояние для смещения барометрического измерения. Методики реализации всех указанных состояний хорошо известны специалистам в данной области техники.
Компоненты вектора состояния могут также включать состояния для смещения трехмерных магнитных измерений. Согласно одному примеру состояния для смещения трехмерных магнитных измерений включают девять состояний для смещений от мягкого железа относительно 3-D осей и три состояния для смещений от твердого железа относительно 3-D осей. Методики реализации таких состояний для смещения трехмерных магнитных измерений хорошо известны специалистам в данной области техники.
Фильтр 302 калибровки функционирует рекурсивно для итерационного обновления вектора состояния на основе обновленных инерциальных измерений, измерений псевдодальности, магнитных измерений и барометрических измерений (в случае их наличия). Согласно одному примеру фильтр 302 калибровки может использовать инерциальные измерения для стадии прогноза, и измерения псевдодальностей, магнитные измерения и барометрические измерения (в случае их наличия) для обновления вектора состояния из стадии прогноза на стадии фильтрации.
На основании состояний магнитного смещения, поддерживаемых фильтром 302 калибровки, генерируют «искусственный курс» (блок 206 на фиг. 2) для того, чтобы содействовать работе основного навигационного фильтра 304 (также именуемого в настоящем документе «основным фильтром 304»). Термин «искусственный курс» определен с целью упрощения, так как указанное вычисление курса содействует работе основного фильтра 304 посредством предоставления магнитного измерения, которое откалибровано и ограничено только курсом; при этом указанное магнитное измерение не влияет на тангаж и крен. Согласно одному примеру искусственный курс может быть магнитным измерением, которое откалибровано в отношении смещения от твердого и мягкого железа и имеет поправку на склонение и наклон. На основе искусственного курса основной фильтр 304 может оценить (предварительно рассчитать) основное навигационное решение, включающее курс, тангаж и крен, в свете откалиброванных магнитных измерений для курса, при этом указанные магнитные измерения не влияют на тангаж и крен.
Помимо состояний магнитного смещения, искусственный курс основан на трехмерных магнитных измерениях, оценках крена и тангажа объекта, полученных из основного фильтра 304, а также магнитном склонении на основе оценки местоположения объекта, полученной из основного фильтра 304. В частности, искусственный курс использует смещения, заданные состояниями магнитного смещения из фильтра 302 калибровки, и производит регулировку магнитных измерений из магнитометра (магнитометров) 10 на их основе для калибровки магнитных измерений. Поскольку фильтр 304 калибровки работает с трехмерными магнитными измерениями и оценивает трехмерные смещения от твердого железа и мягкого железа, магнитные измерения могут быть полностью откалиброваны. Согласно одному примеру откалиброванные магнитные измерения,  , вычисляют по следующей формуле:
, вычисляют по следующей формуле:

где Dmag представляет собой матрицу состояния магнитного смещения, соответствующую девяти смещениям от мягкого железа;  представляет собой вектор
представляет собой вектор
состояния магнитного смещения, соответствующий смещениям от твердого железа; и  представляет собой трехмерные магнитные измерения. Согласно этому примеру откалиброванные магнитные измерения рассчитаны в связанной системе координат объекта 12, что обозначено выше индексом «B».
представляет собой трехмерные магнитные измерения. Согласно этому примеру откалиброванные магнитные измерения рассчитаны в связанной системе координат объекта 12, что обозначено выше индексом «B».
Помимо калибровки измерений, указанный расчет, предназначенный для определения искусственного курса, сокращает трехмерные магнитные измерения до одномерного значения только для курса, тем самым устраняя любые магнитные измерения относительно осей тангажа и крена. Таким образом, откалиброванные магнитные измерения могут быть трансформированы на основе оценок крена и тангажа из основного фильтра 304 и магнитного склонения в местоположении, которое оценено основным фильтром 304, чтобы прийти к искусственному курсу. Согласно одному примеру эта трансформация рассчитывает искусственный курс, ψma, как

где φ представляет собой оценку крена из основного навигационного фильтра 304; θ представляет собой оценку тангажа из основного навигационного фильтра 304; ψdec представляет собой магнитное склонение; и  ,
,  и
и  представляют собой откалиброванные магнитные измерения с компонентами x, y и z в связанной системе координат соответственно. Согласно одному примеру модуль 20 основного фильтра сконфигурирован таким образом, чтобы вызывать расчет обрабатывающим устройством (обрабатывающими устройствами) 16 искусственного курса, однако согласно другим примерам другие модули могут вызвать указанный расчет.
представляют собой откалиброванные магнитные измерения с компонентами x, y и z в связанной системе координат соответственно. Согласно одному примеру модуль 20 основного фильтра сконфигурирован таким образом, чтобы вызывать расчет обрабатывающим устройством (обрабатывающими устройствами) 16 искусственного курса, однако согласно другим примерам другие модули могут вызвать указанный расчет.
После вычисления искусственный курс обрабатывают при помощи основного фильтра 304 в качестве измерения. Аналогично фильтру 302 калибровки, основной фильтр 304 может использовать трехмерные инерциальные измерения для стадии прогноза. Вместо использования трехмерных магнитных измерений подобно фильтру 302 калибровки, основной фильтр 304 использует искусственный курс вместе с измерениями псевдодальности и (в случае их наличия) измерениями из другого необязательного датчика (датчиков) 11 (например, барометра) для обновления стадии прогноза на стадии фильтрации.
Модуль 20 основного фильтра сконфигурирован таким образом, чтобы вызывать моделирование обрабатывающим устройством (обрабатывающими устройствами) 16 ошибки в искусственном курсе, ψma, в качестве коррелированной во времени систематической ошибки смещения курса, bψ.ma, плюс некоррелированный («белый») шум, wma. Коррелированная во времени систематическая ошибка смещения курса, bψ.ma, смоделирована в качестве состояния в пространстве состояний основного фильтра 304. Основной фильтр 304 использует статистические данные из фильтра 302 калибровки для оценки состояния для коррелированного по времени смещения. В частности, статистические данные коррелированного по времени смещения могут быть рассчитаны на основе статистических данных оценок состояния магнитного смещения из фильтра 302 калибровки и влияния ошибки магнитного склонения в местоположении объекта, которое оценено основным фильтром 304. Согласно одному примеру эти статистические данные могут быть трансформированы в статистические данные смещения путем разложения в ряд Тейлора с отсечением всех членов выше первого порядка. Согласно одному примеру состояния коррелированного по времени смещения моделируют в качестве гауссовского марковского (ГМ) процесса 1-го порядка как

где bψ представляет собой коррелированное по времени смещение; τψ представляет собой временную константу ГМ процесса; и wGM представляет собой некоррелированный белый шум, движущий ГМ процесс. Нижний индекс «ma» обозначает то, что соответствующее значение выдано из основного фильтра 304 или является его частью. Стационарная (установившаяся) дисперсия ГМ процесса обозначена как (σGM,ma)2=Var(bψ,ma), где сигма представляет собой стандартное отклонение.
В случае некоррелированного шума искусственного курса, дисперсия некоррелированного шума, σWN, может быть задана шумом измерений магнитометра и статистическими данными виляния ошибки пространственного положения на искусственный курс. Таким образом, основной фильтр 304 может рассчитать некоррелируемый шум, σWN, как (σWN,ma)2=Var(wma). Согласно одному примеру эти статистические данные могут быть трансформированы в статистические данные некоррелированного шума путем разложения в ряд Тейлора с отсечением всех членов выше первого порядка.
В дополнение к состоянию коррелированного по времени смещения, модуль 20 основного фильтра сконфигурирован таким образом, чтобы вызывать выполнение оценивания обрабатывающим устройством (обрабатывающими устройствами) 16 основного навигационного решения для объекта 12 (блок 208 на фиг. 2). Согласно одному примеру основной фильтр 304, оценивающий основное навигационное решение, включает оценку состояний для местоположения, скорости, крена, тангажа и курса объекта 12. Согласно одной реализации эти состояния включают девять или десять состояний для трехмерного местоположения и скорости, а также крена, тангажа и курса объекта 12. Оценивание основного навигационного решения может также включать оценивание состояний для калибровки трехмерных инерциальных измерений. Согласно одному примеру эти состояния включают шесть состояний для калибровки трехмерного ускорения и угловой скорости. Основной фильтр 304 может также оценивать состояния для смещения или дрейфа часов приемника (приемников) 14 ГНСС, состояние для смещения показаний барометра (если имеется барометр), а также состояния для смещений псевдодальностей для сигналов, принятых приемником (приемниками) 14 ГНСС. Основной фильтр 304 функционирует рекурсивно для итерационного обновления состояний на основе обновленных инерциальных измерений, измерений псевдодальности, барометрических измерений (в случае их наличия) и искусственного курса, при этом он может быть основан на алгоритме оценки в соответствии с подходом к проектированию фильтра Кальмана.
После того как основное навигационное решение рассчитали, оно может быть выдано в систему 40 управления навигационным оборудованием, которая может предпринять соответствующие действия, например, осуществлять управление функционированием объекта 12 на основе основного навигационного решения.
Система, представленная на фиг. 1, может также быть сконфигурирована для обеспечения целостности по основному навигационному решению. Указанная целостность может быть обеспечена при помощи технологии разделения решений. Технологии разделения решений включают поддержание множества субрешений для основного навигационного решения при помощи множества субфильтров 306-1 - 306-N (блок 210 на фиг. 2). Отдельное субрешение поддерживают для каждого набора из N-1 спутников, при этом основное навигационное решение включает измерения от всех N спутников. Таким образом, каждое субрешение включает измерения от отличной комбинации из N-1 спутников. Следовательно, субфильтр 306-n исключает измерения от спутника n. Если спутнику присущи значительные ошибки, он будет уводить одно или более субрешений от основного навигационного решения, поддерживаемого основным фильтром 304. Более конкретно, существуют отличия решений (также именуемые в настоящем документе «расхождениями») между основным навигационным решением из основного фильтра 304 и каждым субрешением из каждого субфильтра 306.
Модуль 22 субрешений сконфигурирован таким образом, чтобы вызывать вычисление обрабатывающим устройством (обрабатывающими устройствами) 16 таких субрешений для основного навигационного решения. Согласно одному примеру каждый субфильтр 306 оценивает, в целом, один и тот же вектор состояний, что и основной фильтр 304. Следовательно, смысловое содержание переменных состояния между субрешениями и основным решением является одинаковым; однако векторы состояния некоторых субрешений могут принадлежать к измерению, отличному от измерения вектора состояния основного решения. Поскольку субрешение обрабатывает N-1 измерений, будет оценено только N-1 смещений псевдодальностей (в отличие от N смещений в основном фильтре). Однако, как правило, в примерах, в которых основной фильтр оценивает состояния для трехмерного местоположения, трехмерной скорости, крена, тангажа и курса, субрешения могут оценивать состояния для аналогичных показателей. Субфильтр 306 может также оценивать состояния для калибровки трехмерных инерциальных измерений, смещения или дрейфа часов приемника (приемников) 14 ГНСС, состояние для смещения барометра (если имеется барометр), а также состояния для смещений псевдодальностей для сигналов, принятых приемником (приемниками) 14 ГНСС. Каждый субфильтр 306 может также оценивать состояние для коррелированного по времени смещения искусственного курса.
Как и основной фильтр 304, субфильтры 306 могут аналогично оценивать эти состояния на основе трехмерных инерциальных измерений, измерений псевдодалыюсти от приемника (приемников) 14 ГНСС, а также искусственного курса на основе вычислений, аналогичных вычислениям, используемым в фильтре 302 калибровки. Согласно одному примеру искусственный курс, который использовали для основного фильтра 304, может быть использован для каждого из субфильтров 306. Согласно альтернативному примеру искусственный курс, используемый каждым субфильтром, может быть основан на оценках крена и тангажа из соответствующего субфильтра 306 и магнитном склонении в местоположении, которое оценено этим соответствующим субфильтром 306. Соответственно, каждый субфильтр может использовать независимый искусственный курс, который рассчитан путем трансформации калибровочных магнитных измерений на основе крена, тангажа и местоположения соответствующего субфильтра.
Модуль 26 целостности навигационного решения сконфигурирован таким образом, чтобы вызывать выполнение определения обрабатывающим устройством (обрабатывающими устройствами) 16 пределов защиты на основе основного навигационного решения и субрешений. Методики определения предела защиты (целостности) по векторам состояний, которые поддерживаются основным фильтром 304 и субфильтрами 306, для навигационных значений, отличных от курса, хорошо известны специалистам в данной области техники, и основаны на расхождениях между основным навигационным решением и каждым соответствующим субрешением для соответствующих навигационных значений.
Поскольку основной фильтр 304 и субфильтры 306 не моделируют корреляций сглаживания по оценкам крена и тангажа, предел защиты по курсу, основанный на расхождениях курсов между основным фильтром 304 и каждым соответствующим субфильтром 306, может быть слишком оптимистичным. Следовательно, предел защиты по курсу рассчитывают на основе оценки курса из фильтра 302 калибровки. Однако согласно одному примеру субрешения оценки курса из фильтра калибровки не рассчитывают для того, чтобы снизить количество необходимых расчетов. Вместо этого осуществляют аппроксимацию ковариаций для оценок курса гипотетических субрешений из фильтра 302 калибровки (блок 212 на фиг. 2).
Ковариаций для оценок курса гипотетических субрешений (которые также именуют в настоящем документе «ковариациями курса субрешений») фильтра 302 калибровки могут быть аппроксимированы на основе отношения ковариаций курса основного фильтра 304, каждого из соответствующих ему субфильтров 306 и фильтра 302 калибровки. В частности, можно предположить, что отношение между ковариацией курса фильтра 302 калибровки и ковариацией курса соответствующего («n-го») гипотетического субфильтра для фильтра 302 калибровки является приблизительно равным отношению между ковариацией курса основного фильтра 304 и ковариацией курса соответствующего ему «n-го» субфильтра 306. Это соотношение выражено следующим уравнением:

Это соотношение может быть принято для каждого из гипотетических субфильтров (1-N) фильтра 302 калибровки. При помощи этого соотношения может быть определено множество ковариаций курса N субрешений для фильтра 302 калибровки. Согласно одному примеру коэффициент переограничения, γovrb, используют, чтобы убедиться в том, что аппроксимация каждой ковариаций курса субрешения для фильтра 302 калибровки не является слишком оптимистичной. В этом примере каждая ковариация курса субрешения для фильтра 302 калибровки может быть рассчитана исходя из

где Coν(ψ)n,3-D представляет собой ковариацию курса субрешения для гипотетического субрешения «n» фильтра 302 калибровки; γovrb представляет собой коэффициент переограничения, который больше или равен 1; Coν(ψ)0,3-D представляет собой ковариацию курса фильтра 302 калибровки; Coν(ψ)0,DMHA представляет собой ковариацию курса основного фильтра 304; и Coν(ψ)n,DMHA представляет собой ковариацию курса субрешения «n» из субфильров 306 основного фильтра 304. Примечательно, что субрешение «n» основного фильтра 304 и гипотетическое субрешение «n» фильтра 302 калибровки соответствуют одному и тому же набору из N-1 спутников.
После того как определены ковариаций курса для всех гипотетических субрешений, предел защиты по курсу (YPL) может быть вычислен (блок 214 на фиг. 2) следующим образом: 
где 
и 
и 
и Kff, Kfa и Kmd представляют собой так называемые сигма-множители, известные специалистам в данной области техники.
Предел защиты по курсу наряду с пределами защиты для других навигационных значений могут быть предоставлены для системы 40 управления навигационным оборудованием. Система 40 управления навигационным оборудованием может предпринимать соответствующее действие, такое как инициирование сигнала тревоги, когда предел защиты находится за границами допустимого диапазона.
Предпочтительно, этот способ может быть использован для обеспечения целостности решения для курса с магнитной коррекцией с использованием лишь одного дополнительного фильтра (фильтра 302 калибровки магнитных измерений) сверх фильтров, используемых в стандартной реализации разделения решений. Это означает, что описанные выше способы могут быть реализованы с использованием N+2 фильтров, если реализовано обнаружение отказов, но не исключение отказов, где N представляет собой количество процессов измерений псевдодальностей. Кроме того, описанные выше способы представляют удобные навигационные решения для всех навигационных систем, в которых использован недорогой инерциальный датчик (как правило, микроэлектромеханический инерциальный датчик), который функционирует при содействии ГНСС и магнитометра. Такие системы могут, например, именоваться GPS (система глобального позиционирования)/INS (инерциальная навигационная система), GNSS (глобальная навигационная спутниковая система)/IBS, GPS/AHRS (система определения курса и углового пространственного положения), GNSS/AHRS и GPAHRS. Дополнительно, описанный в настоящем документе объект может быть использован в улучшенном способе мониторинга целостности данных приемников (ARAIM) или любом способе на основе разделения решений, таком как способ разделения решений, в котором N представляет количество состояний отказов, которые должны быть минимизированы, а не количество измерений псведодальностей.
Согласно одному примеру один или несколько приемников 14 ГНСС содержат множество антенн ГНСС для приема сигнала ГНСС и могут обеспечивать вычисленные значения для пространственного положения и курса воздушного судна с использованием интерферометрии ГНСС. Ошибки ГНСС вносят вклад непосредственно в источники ошибок для пространственного положения и курса. Согласно некоторым реализациям этого примера приемник (приемники) 14 ГНСС могут рассчитать мгновенное решение по методу наименьших квадратов с использованием лишь множества измерений ГНСС. Согласно другим реализациям гибридное решение может быть рассчитано путем обработки полученных на основе ГНСС решений для пространственного положения и курса в качестве данных измерений для фильтра. Согласно таким реализациям упомянутые выше технологии на основе разделения решений и фильтра Кальмана могут быть применены к множеству антенн и наборам данных при определении ошибок в оценках пространственного положения и курса.
Хотя представленное выше описание сфокусировано только на обнаружении отказов, описанный в настоящем документе объект может быть расширен таким образом, чтобы включать эффективное обнаружение и исключение отказов путем добавления слоя фильтра субрешений, что понятно специалистам в данной области техники.
Хотя описанная выше технология разделения решений соответствует ГНСС, эта же технология может быть применена к множеству наборов данных из других приборов. Например, может существовать множество наборов приборов, таких как группа ИИБ, установленных на объекте 12, и технология разделения решений может быть применена к наборам данных из других приборов перед их объединением с данными из ГНСС.
Примеры
Пример 1 включает способ определения курса для гибридной навигационной системы при помощи магнитометра, включающий: получение сигналов от множества спутников глобальной навигационной спутниковой системы (ГНСС), соответствующих объекту; получение трехмерных инерциальных измерений от одного или нескольких инерциальных датчиков, соответствующих объекту; получение трехмерных магнитных измерений от одного или нескольких магнитометров, соответствующих объекту; оценку состояний магнитного смещения для смещений трехмерных магнитных измерений при помощи фильтра калибровки магнитных измерений с использованием трехмерных инерциальных измерений, данных из сигналов от множества спутников ГНСС и трехмерных магнитных измерений; расчет искусственного курса для объекта на основе состояний магнитного смещения; и оценку основного навигационного решения для объекта при помощи основного навигационного фильтра с использованием трехмерных инерциальных измерений, данных из сигналов от множества спутников ГНСС и искусственного курса.
Пример 2 включает способ, который раскрыт в примере 1, в котором оценка состояний магнитного смещения включает оценку девяти состояний для смещений от мягкого железа и трех состояний для смещений от твердого железа.
Пример 3 включает способ, раскрытый в любом из примеров 1-2, который включает: оценку состояний для местоположения, скорости, крена, тангажа и курса указанного объекта при помощи фильтра калибровки магнитных измерений; оценку состояний для калибровки трехмерных инерциальных измерений при помощи фильтра калибровки магнитных измерений; оценку состояний для смещения и дрейфа часов ГНСС при помощи фильтра калибровки магнитных измерений; и оценку состояний для смещений псевдодальностей для сигналов от спутников ГНСС при помощи фильтра калибровки магнитных измерений.
Пример 4 включает способ, раскрытый в любом из примеров 1-3, который включает: получение барометрических измерений, соответствующих объекту; оценку состояния для смещения барометрических измерений при помощи фильтра калибровки магнитных измерений; и оценку состояния для смещения барометрических измерений при помощи основного навигационного фильтра.
Пример 5 включает способ, раскрытый в любом из примеров 1-4, в котором расчет искусственного курса включает расчет искусственного курса на основе состояний магнитного смещения, трехмерных магнитных измерений, оценок крена и тангажа объекта из основного навигационного фильтра, а также магнитного склонения на основе оценки местоположения объекта из основного навигационного фильтра.
Пример 6 включает способ, раскрытый в любом из примеров 1-5, в котором расчет искусственного курса включает расчет искусственного курса, ψma, как

где φ представляет собой оценку крена из основного навигационного фильтра, θ представляет собой оценку тангажа из основного навигационного фильтра, ψdec представляет собой магнитное склонение,  ,
,  и
и  представляют собой откалиброванные магнитные измерения с компонентами x, y и z в связанной системе координат соответственно.
представляют собой откалиброванные магнитные измерения с компонентами x, y и z в связанной системе координат соответственно.
Пример 7 включает способ, раскрытый в примере 6, в котором  рассчитывают как
рассчитывают как

где Dmag представляет собой матрицу состояний магнитного смещения, соответствующую смещениям от мягкого железа;  представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и
представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и  представляет собой трехмерные магнитные измерения.
представляет собой трехмерные магнитные измерения.
Пример 8 включает способ, раскрытый в любом из примеров 1-7, который включает: оценку коррелированного по времени смещения искусственного курса при помощи основного навигационного фильтра.
Пример 9 включает способ, раскрытый в примере 8, в котором оценка коррелированного по времени смещения включает оценку коррелированного по времени смещения на основе статистических данных состояний магнитного смещения и статистических данных магнитного склонения на основе статистических данных оценки местоположения объекта из основного навигационного фильтра.
Пример 10 включает способ, раскрытый в любом из примеров 8 или 9, который включает: оценку состояний для калибровки трехмерных инерциальных измерений при помощи основного навигационного фильтра; оценку состояний для смещения и дрейфа часов ГНСС при помощи основного навигационного фильтра; и оценку состояний для смещений псевдодальностей для сигналов от спутников ГНСС при помощи основного навигационного фильтра; при этом оценка основного навигационного решения включает оценку состояний для местоположения, скорости, крена, тангажа и курса объекта.
Пример 11 включает способ, раскрытый в любом из примеров 1-10, который включает: оценку некоррелированного шума искусственного курса на основе статистических данных шума измерений магнитометра и статистических данных влияния ошибки пространственного положения на искусственный курс.
Пример 12 включает способ, раскрытый в любом из примеров 1-11, который включает: оценку множества субрешений для основного навигационного решения при помощи множества субфильтров с использованием разделения решений; расчет ковариаций курса для каждого из множества субрешений; расчет ковариаций курса для основного навигационного решения; расчет ковариаций курса для фильтра калибровки магнитных измерений; аппроксимацию множества ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений, на основе ковариаций курса для основного навигационного решения, ковариаций курса для каждого Из множества субрешений и ковариаций курса для фильтра калибровки магнитных измерений; и определение предела защиты, который ограничивает ошибку в курсе основного навигационного решения, на основе соответствующих расхождений между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений.
Пример 13 включает способ, раскрытый в примере 12, в котором аппроксимация множества ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений, включает аппроксимацию ковариаций курса n-го субрешения, Coν(ψ)n,3-D, исходя из

где γovrb представляет собой коэффициент переограничения, который больше или равен единице; Coν(ψ)0,3-D представляет собой ковариацию курса фильтра калибровки магнитных измерений; Coν(ψ)0,DMHA представляет собой ковариацию курса основного навигационного фильтра; и Coν(ψ)n,DMHA представляет собой ковариацию курса n-го субрешения для основного навигационного фильтра.
Пример 14 включает навигационную систему для объекта, содержащую: одно или несколько обрабатывающих устройств; один или несколько приемников глобальной навигационной спутниковой системы (ГНСС), связанных с одним или несколькими обрабатывающими устройствами; один или несколько инерциальных измерительных блоков (ИИБ), связанных с одним или несколькими обрабатывающими устройствами, при этом один или несколько ИИБ сконфигурированы для получения трехмерных инерциальных измерений, соответствующих указанному объекту; один или несколько магнитометров, связанных с одним или несколькими обрабатывающими устройствами, при этом один или несколько магнитометров сконфигурированы для получения трехмерных магнитных измерений магнитного поля в местоположении указанного объекта; и одно или несколько запоминающих устройств, связанных с одним или несколькими обрабатывающими устройствами и содержащих инструкции, которые, при выполнении одним или несколькими обрабатывающими устройствами, вызывают выполнение одним или несколькими обрабатывающими устройствами следующих действий: оценка состояний магнитного смещения для смещений трехмерных магнитных измерений при помощи фильтра калибровки магнитных измерений с использованием трехмерных инерциальных измерений для стадии прогноза, а также данных из одного или нескольких приемников ГНСС и трехмерных магнитных измерений в качестве, вектора измерения; расчет искусственного курса для объекта на основе состояний магнитного смещения; и оценка основного навигационного решения для объекта при помощи основного навигационного фильтра с использованием трехмерных инерциальных измерений для стадии прогноза, а также данных из одного или нескольких приемников ГНСС и искусственного курса в качестве вектора измерения.
Пример 15 включает навигационную систему, которая раскрыта в примере 14, в которой оценка состояний магнитного смещения включает оценку девяти состояний для смещений от мягкого железа и трех состояний для смещений от твердого железа.
Пример 16 включает навигационную систему, раскрытую в любом из примеров 14 или 15, в которой расчет искусственного курса включает расчет искусственного курса, ψma, как

где φ представляет собой оценку крена объекта из основного навигационного фильтра; θ представляет собой оценку тангажа объекта из основного навигационного фильтра; ψdec представляет собой магнитное склонение на основе оценки местоположения из основного навигационного фильтра; и  рассчитывают как
рассчитывают как

где Dmag представляет собой матрицу состояний магнитного смещения, соответствующую смещениям от мягкого железа;  представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и
представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и  представляет собой трехмерные магнитные измерения.
представляет собой трехмерные магнитные измерения.
Пример 17 включает навигационную систему, раскрытую в любом из примеров 14-16, в которой инструкции вызывают выполнение одним или несколькими обрабатывающими устройствами следующих действий: оценка коррелированного по времени смещения искусственного курса при помощи основного навигационного фильтра и на основе статистических данных состояний магнитного смещения и статистических данных магнитного склонения на основе статистических данных оценки местоположения указанного объекта из основного навигационного фильтра; и оценка некоррелированного шума искусственного курса на основе статистических данных шума измерений магнитометра и статистических данных влияния ошибки пространственного положения на искусственный курс.
Пример 18 включает навигационную систему, раскрытую в примере 17, в которой инструкции вызывают выполнение одним или несколькими обрабатывающими устройствами следующих действий: оценка состояний для калибровки трехмерных инерциальных измерений при помощи основного навигационного фильтра; оценка состояний для смещения и дрейфа часов ГНСС при помощи основного навигационного фильтра; и оценка состояний для смещений псевдодальностей для сигналов от спутников ГНСС при помощи основного навигационного фильтра; при этом оценка основного навигационного решения включает оценку состояний для местоположения, скорости, крена, тангажа и курса указанного объекта.
Пример 19 включает навигационную систему, раскрытую в любом из примеров 14-18, в которой инструкции вызывают выполнение одним или несколькими обрабатывающими устройствами следующих действий: оценка множества субрешений для основного навигационного решения при помощи множества субфильтров с использованием разделения решений; расчет ковариаций курса для каждого из множества субрешений; расчет ковариаций курса для основного навигационного решения; расчет ковариаций курса для фильтра калибровки магнитных измерений; аппроксимация множества ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений, на основе отношения между ковариацией курса для основного навигационного решения и ковариацией курса для каждого из множества субрешений, приблизительно равного отношению между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений; и определение предела защиты, который ограничивает ошибку в курсе основного навигационного решения, на основе соответствующих расхождений между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений.
Пример 20 включает машиночитаемый носитель, содержащий инструкции, которые, при выполнении одним или несколькими обрабатывающими устройствами, вызывают выполнение одним или несколькими обрабатывающими устройствами следующих действий: оценка состояний магнитного смещения для смещений трехмерных магнитных измерений при помощи фильтра калибровки магнитных измерений с использованием трехмерных инерциальных измерений для стадии прогноза, а также данных из сигналов от множества спутников глобальной навигационной спутниковой системы (ГНСС) и трехмерных магнитных измерений в качестве вектора измерения; при этом оценка состояний магнитного смещения включает оценку девяти состояний для смещений от мягкого железа и трех состояний для смещений от твердого железа; расчет искусственного курса, ψma, для объекта как

где φ представляет собой оценку крена объекта из основного навигационного фильтра; θ представляет собой оценку тангажа объекта из основного навигационного фильтра; ψdec представляет собой магнитное склонение на основе оценки местоположения из основного навигационного фильтра; и  рассчитывают как
рассчитывают как

где Dmag представляет собой матрицу состоянии магнитного смещения, соответствующую смещениям от мягкого железа;  представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и представляет собой трехмерные магнитные измерения; оценка статистических данных коррелированного по времени смещения искусственного курса при помощи основного навигационного фильтра и на основе статистических данных состояний магнитного смещения и статистических данных магнитного склонения на основе статистических данных оценки местоположения указанного объекта из основного навигационного фильтра; оценка статистических данных некоррелированного шума искусственного курса на основе статистических данных шума измерений магнитометра и статистических данных влияния ошибки пространственного положения на искусственный курс; оценка состояний для калибровки трехмерных инерциальных измерений при помощи основного навигационного фильтра; оценка состояний для смещения и дрейфа часов ГНСС при помощи основного навигационного фильтра; и оценка состояний для смещений псевдодальностей для сигналов от спутников ГНСС при помощи основного навигационного фильтра; оценка состояний для местоположения, скорости, крена, тангажа и курса указанного объекта; оценка множества субрешений для основного навигационного решения при помощи множества субфильтров с использованием разделения решений; расчет ковариации курса для каждого из множества субрешений; расчет ковариации курса для основного навигационного решения; расчет ковариации курса для фильтра калибровки магнитных измерений; аппроксимация множества ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений, на основе отношения между ковариацией курса для основного навигационного решения и ковариацией курса для каждого из множества субрешений, приблизительно равного отношению между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений; и определение предела защиты, который ограничивает ошибку состояния для курса указанного объекта, на основе соответствующих расхождений между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений.
представляет собой вектор состояния магнитного смещения, соответствующий смещениям от твердого железа; и представляет собой трехмерные магнитные измерения; оценка статистических данных коррелированного по времени смещения искусственного курса при помощи основного навигационного фильтра и на основе статистических данных состояний магнитного смещения и статистических данных магнитного склонения на основе статистических данных оценки местоположения указанного объекта из основного навигационного фильтра; оценка статистических данных некоррелированного шума искусственного курса на основе статистических данных шума измерений магнитометра и статистических данных влияния ошибки пространственного положения на искусственный курс; оценка состояний для калибровки трехмерных инерциальных измерений при помощи основного навигационного фильтра; оценка состояний для смещения и дрейфа часов ГНСС при помощи основного навигационного фильтра; и оценка состояний для смещений псевдодальностей для сигналов от спутников ГНСС при помощи основного навигационного фильтра; оценка состояний для местоположения, скорости, крена, тангажа и курса указанного объекта; оценка множества субрешений для основного навигационного решения при помощи множества субфильтров с использованием разделения решений; расчет ковариации курса для каждого из множества субрешений; расчет ковариации курса для основного навигационного решения; расчет ковариации курса для фильтра калибровки магнитных измерений; аппроксимация множества ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений, на основе отношения между ковариацией курса для основного навигационного решения и ковариацией курса для каждого из множества субрешений, приблизительно равного отношению между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений; и определение предела защиты, который ограничивает ошибку состояния для курса указанного объекта, на основе соответствующих расхождений между ковариацией курса для фильтра калибровки магнитных измерений и каждой из ковариаций курса субрешений, соответствующих фильтру калибровки магнитных измерений.





















Композиции и способы определения назаконного использования удобрений
Способ получения сульфата-нитрата аммония
Способ получения оскида олова высокой чистоты
Высокопрочное изделие в виде ленты из полиэтилена сверхвысокой молекулярной массы
Газофазная и жидкофазная каталитическая перегруппировка бекмана оксимов с получением лактамов
Способ улавливания и повторного применения железного катализатора, используемого при получении галогеналкановых соединений
Материалы для битумного дорожного покрытия и способы их получения
Высокомодульное волокно высокой прочности из сверхвысокомолекулярного полиэтилена и способ его получения
Пряжа и ткань, характеризующиеся наличием обработанной поверхности с улучшенными физическими и адгезионными свойствами, и способ их изготовления
Способ и устройство гранулирования с регулированием давления

